Research on Distributed PV Storage Virtual Synchronous Generator System and Its Static Frequency Characteristic Analysis




Abstract
1. Introduction
2. S-L Analysis Method
2.1. Overview of Power System Frequency Regulation
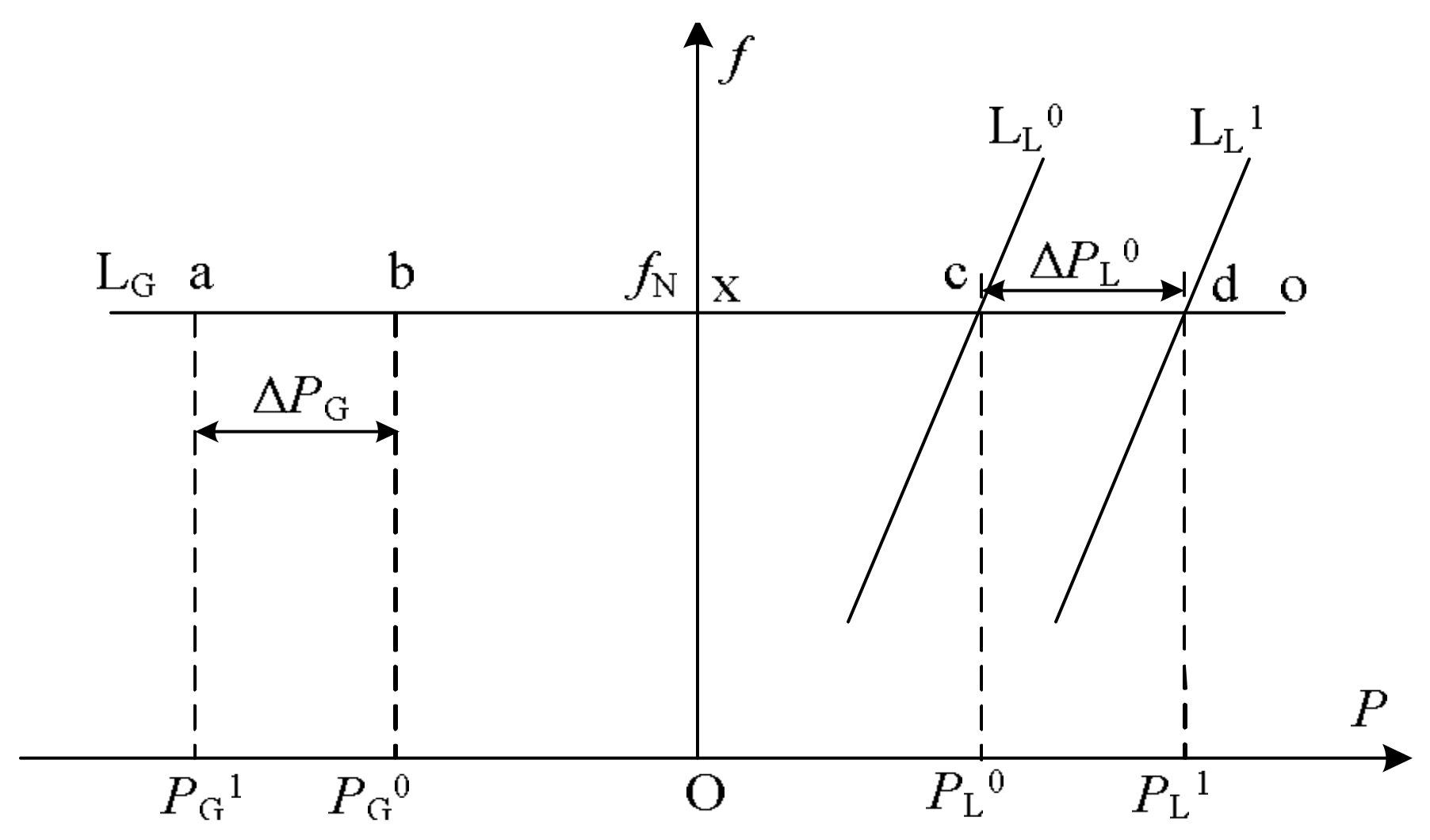
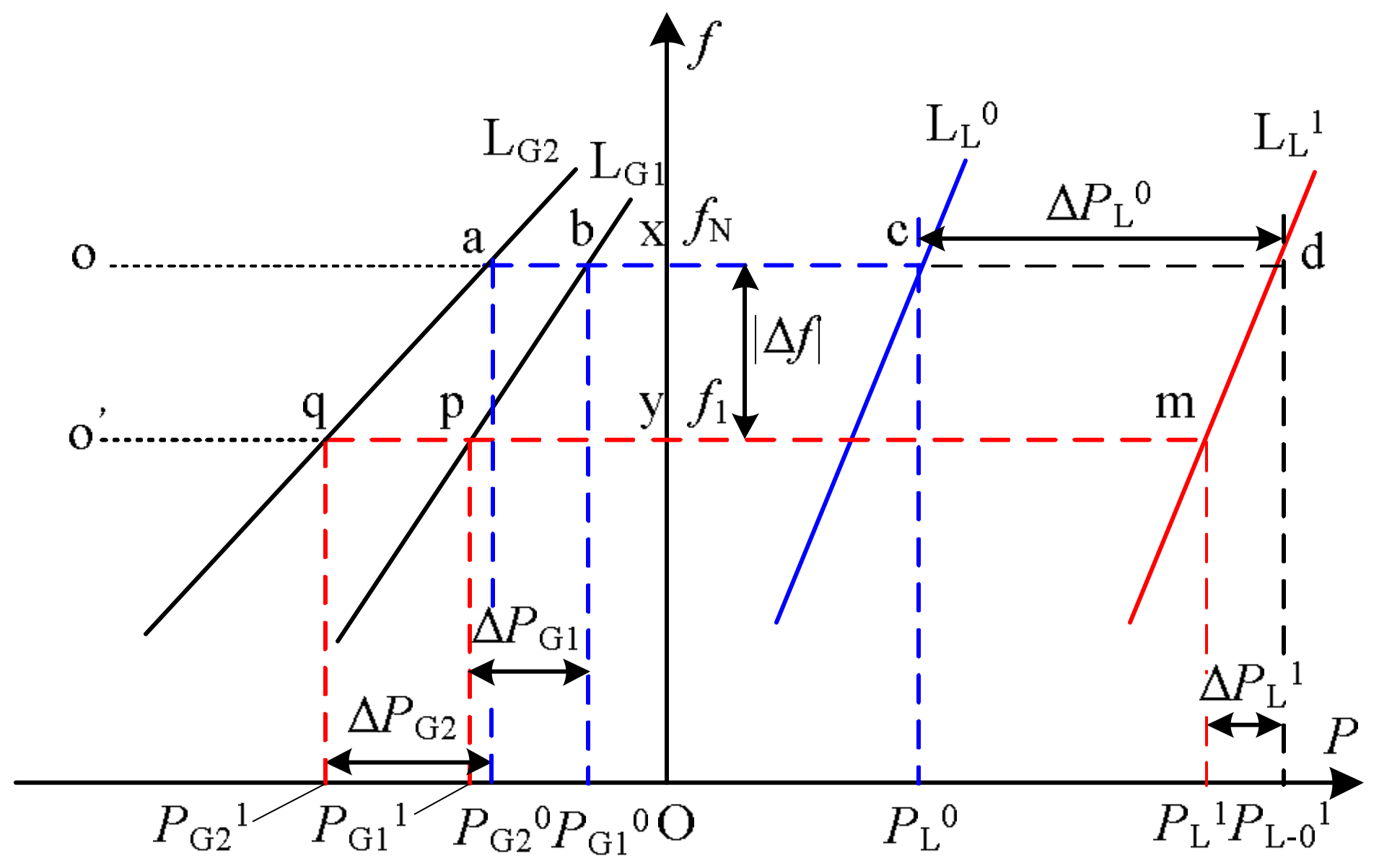
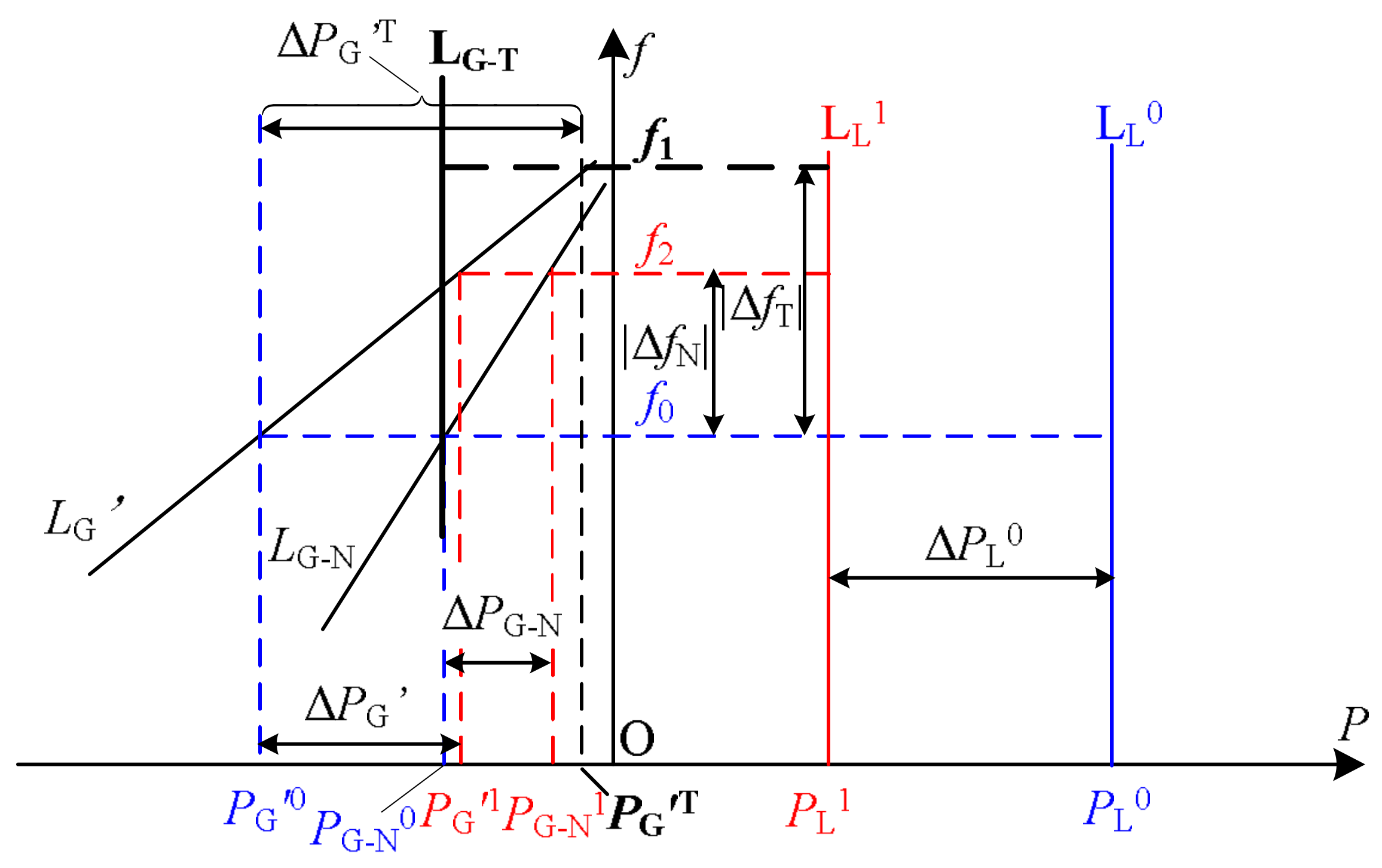
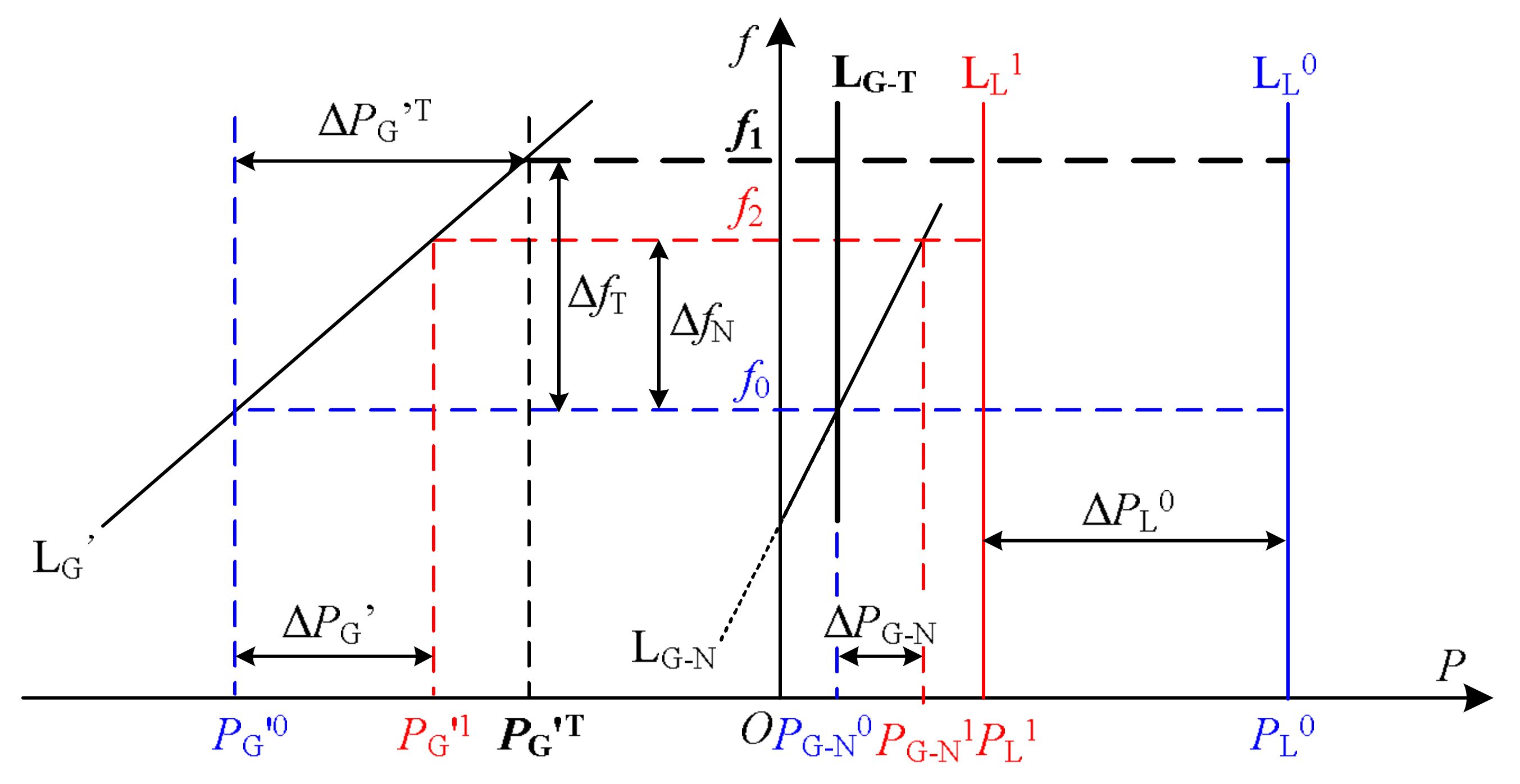
2.2. Introduction of S-L Analysis Method
2.3. S-L Analysis Method of Single-Supply System
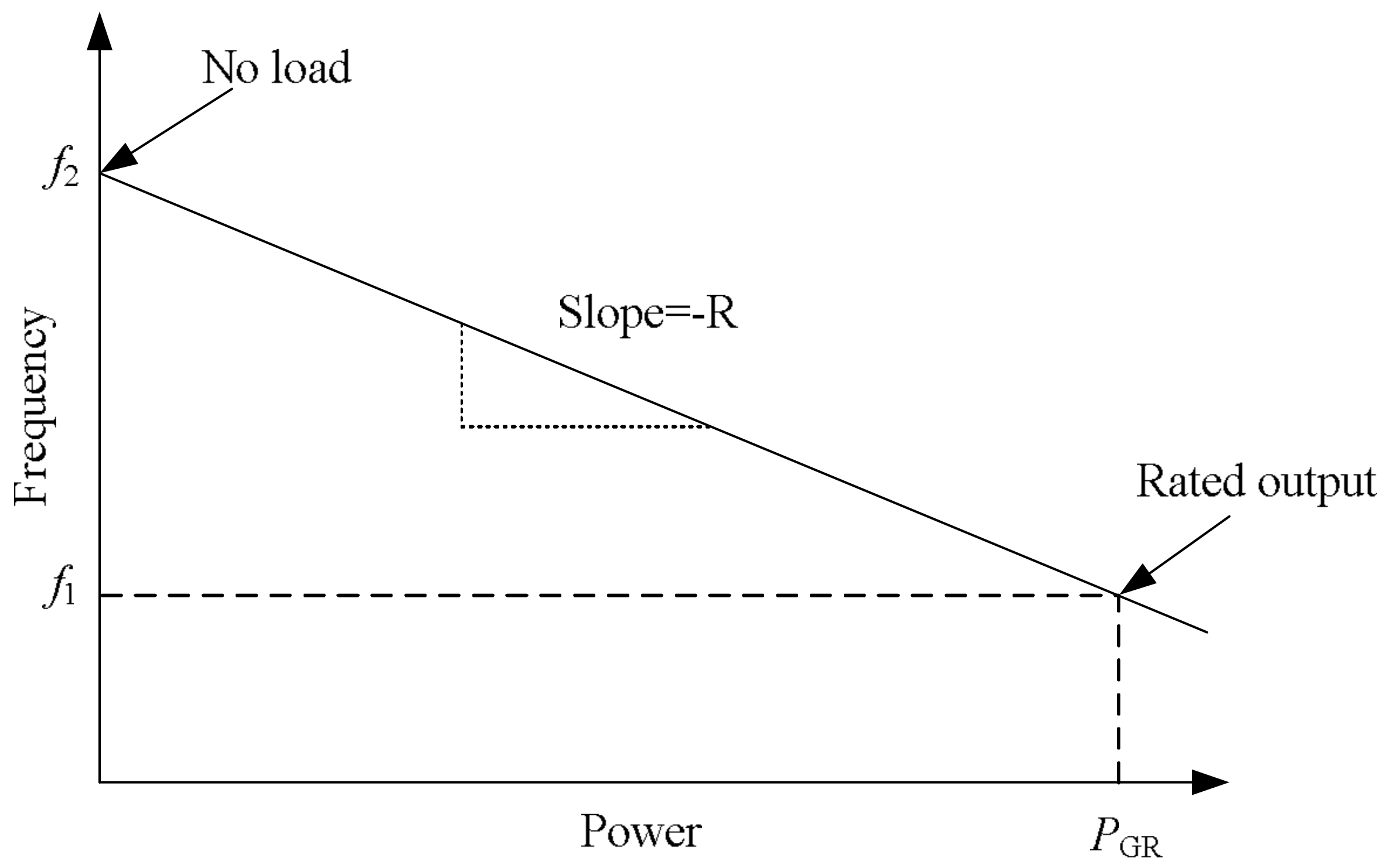
2.3.1. Conventional Single-Supply System
2.3.2. Special Single-Supply System
2.4. S-L Analysis Method of Multi-Power System
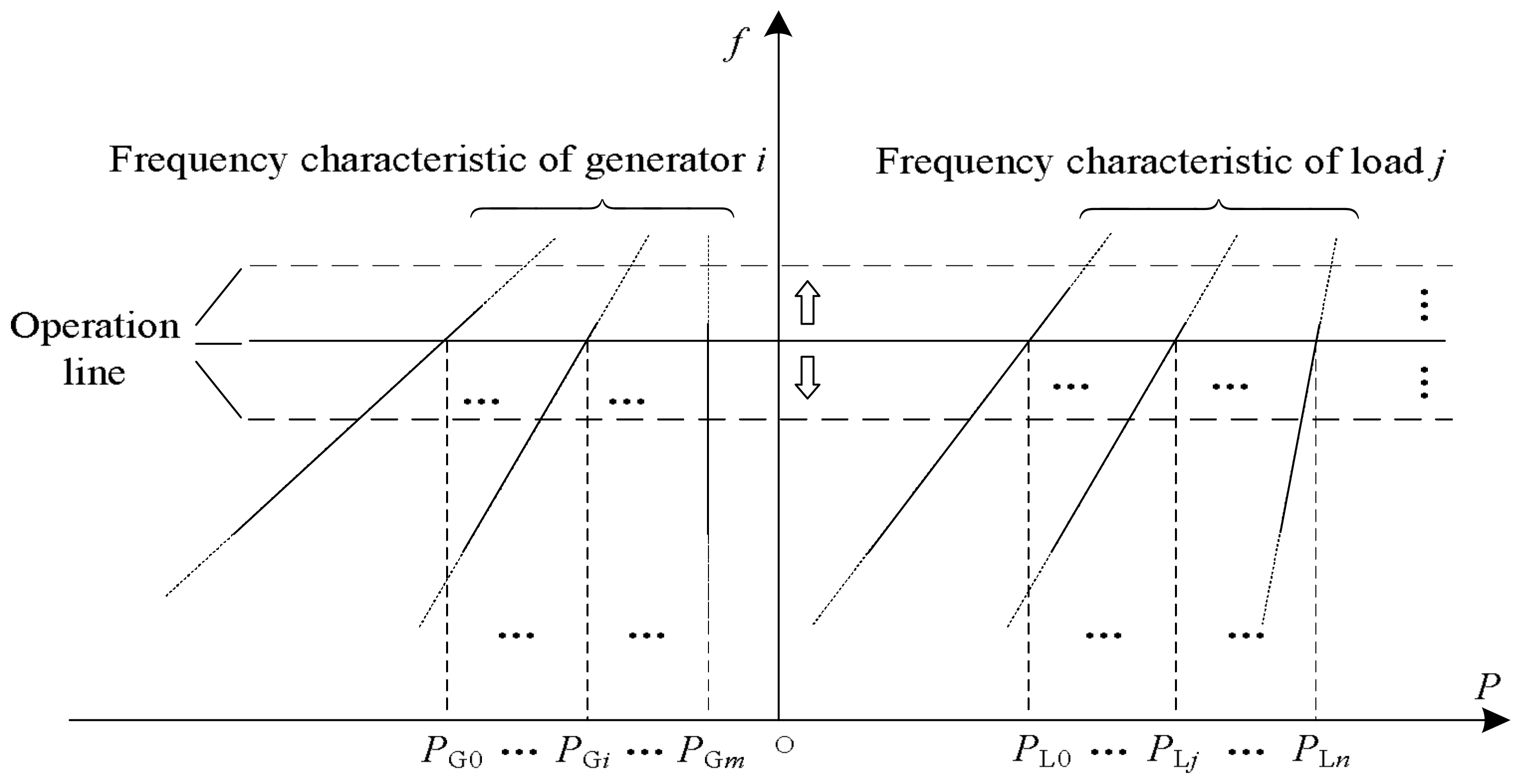
2.4.1. Generator Set
2.4.2. Input/Output Bidirectional Devices
2.4.3. The Actual Power Grid
3. Distributed PV Storage Virtual Synchronous Generator System
3.1. The Power-Frequency Characteristics of Converter at the Interface of Input/Output Bidirectional Devices
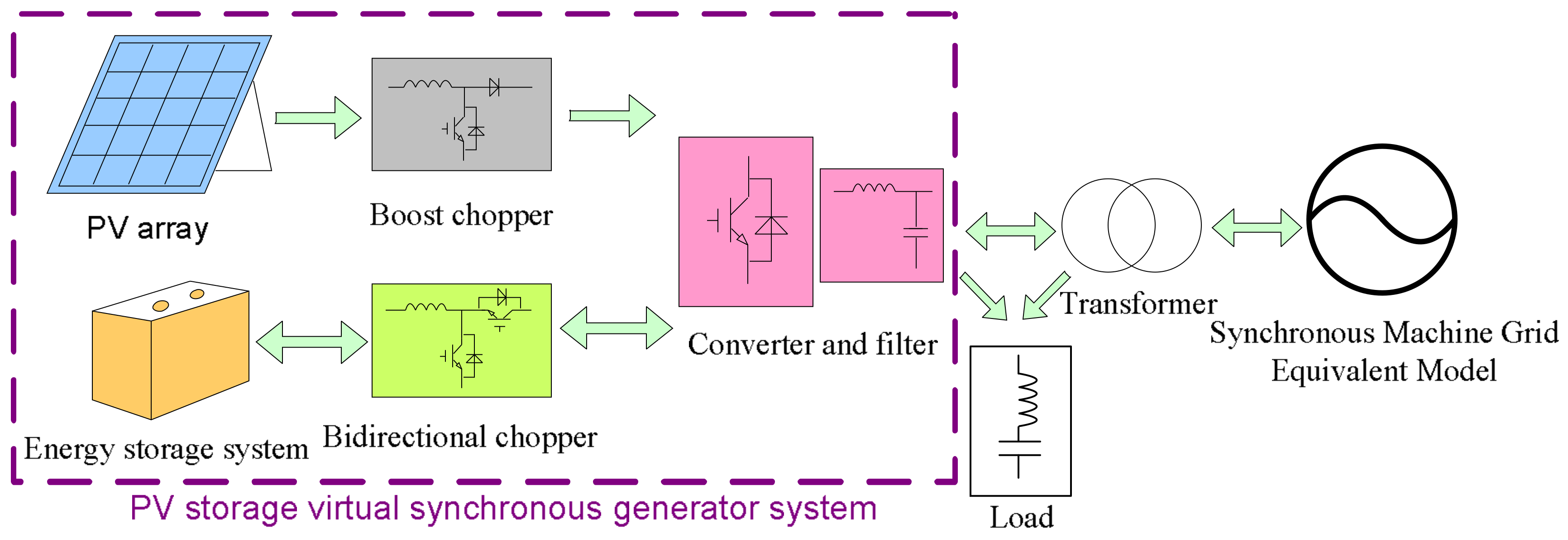
3.2. Structure of System
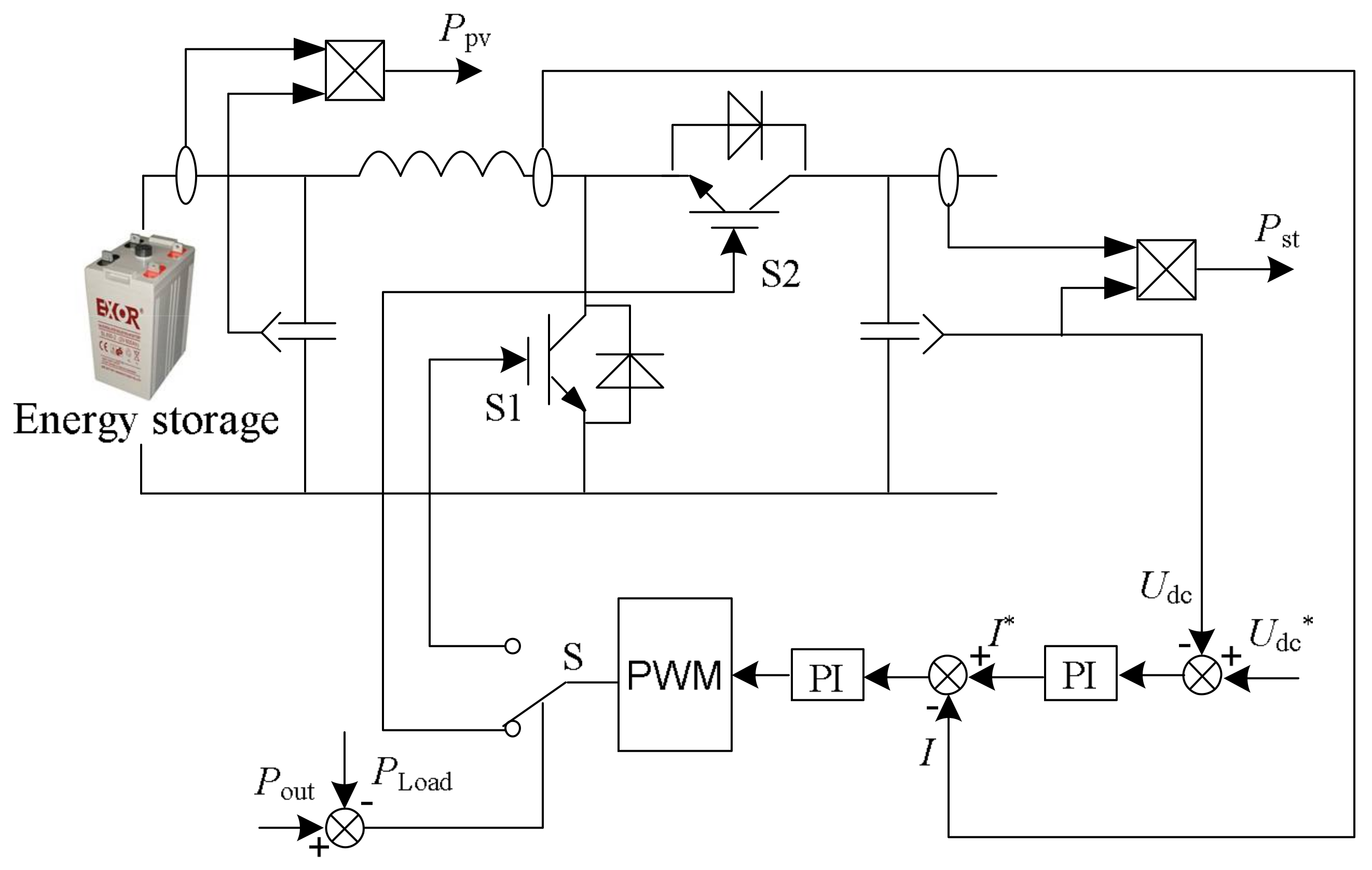
3.3. Bidirectional DC-DC (Chopper)

3.4. Bidirectional PV Storage Converter
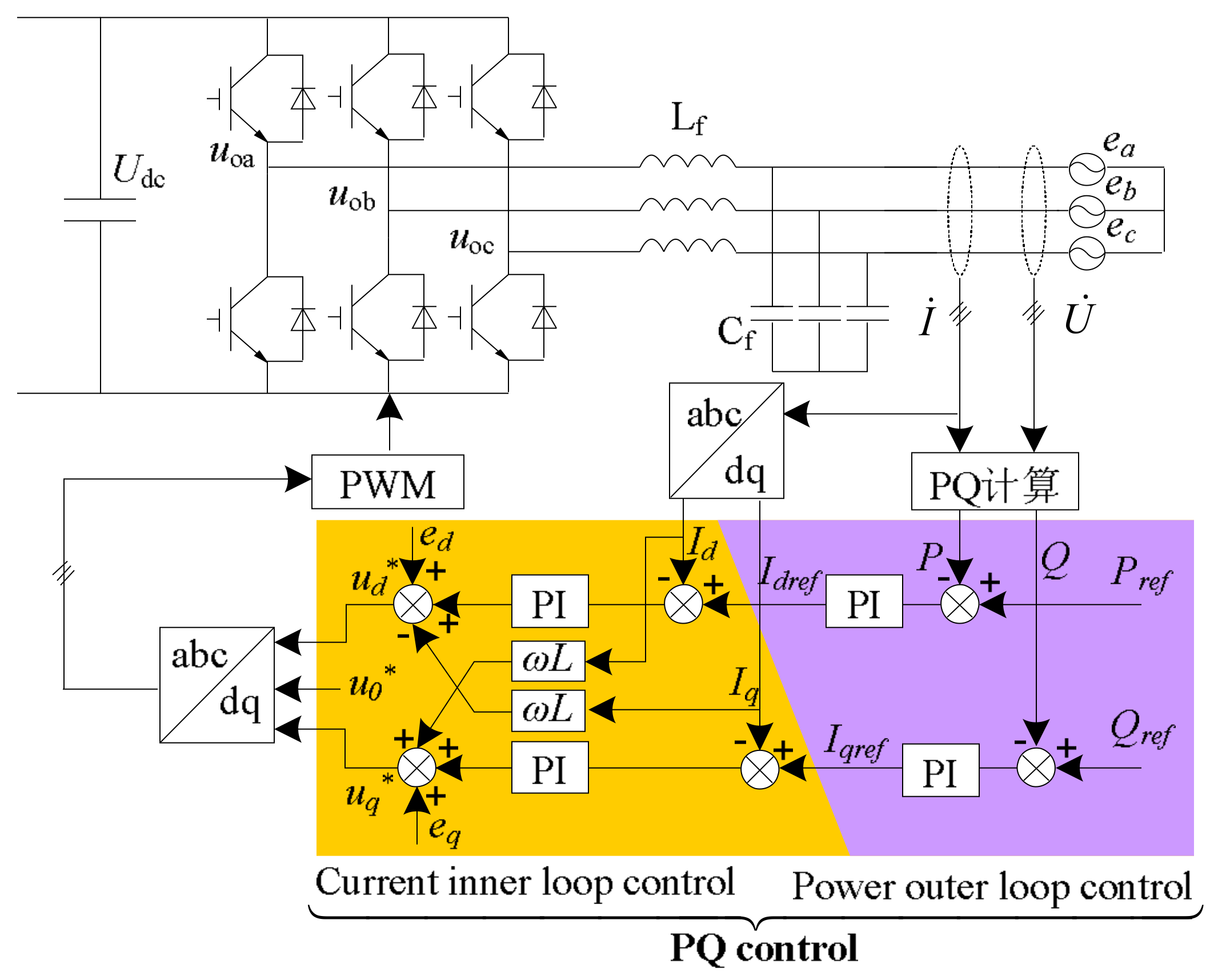
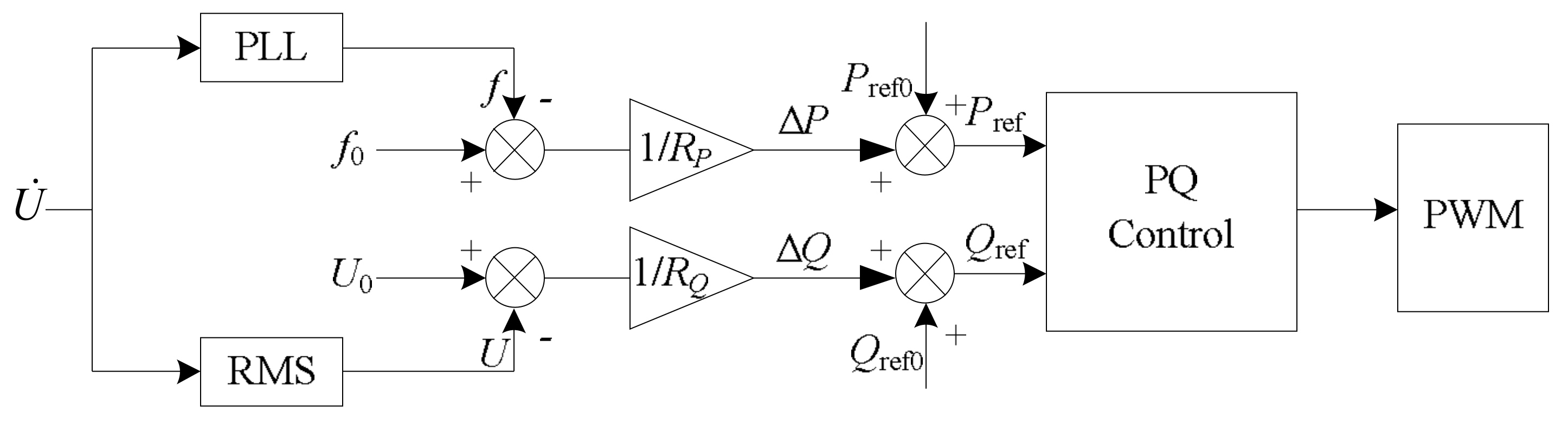
3.4.1. PQ Control
3.4.2. Improved PQ Control

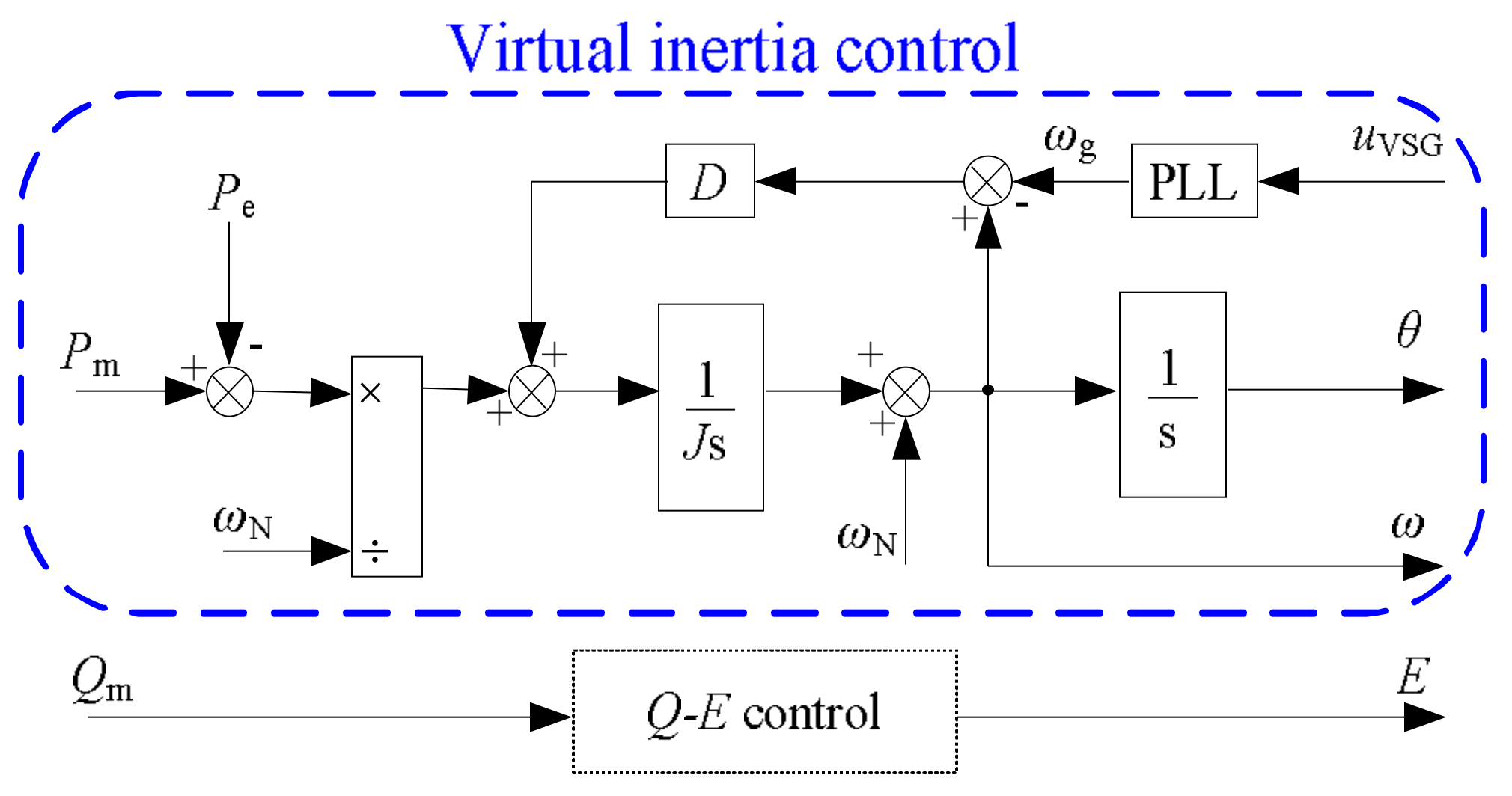
3.4.3. VSG

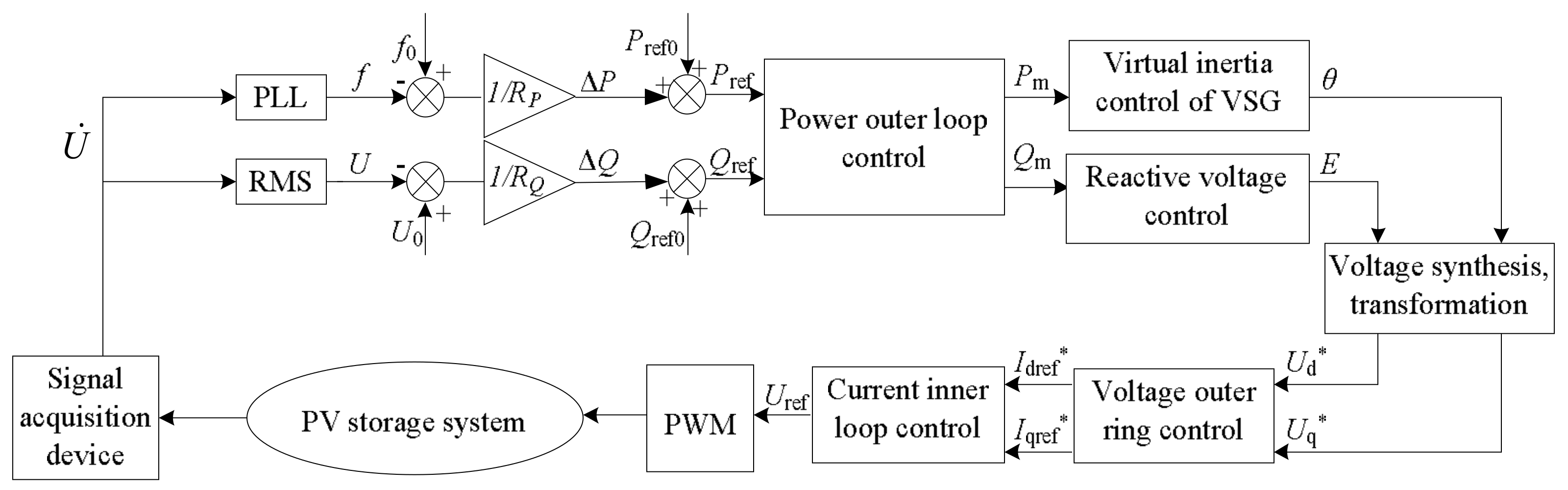
3.4.4. Complete Control Scheme
4. Problems in the Process of Microgrid Formation
4.1. Synchronous Machine Grid Equivalent Model
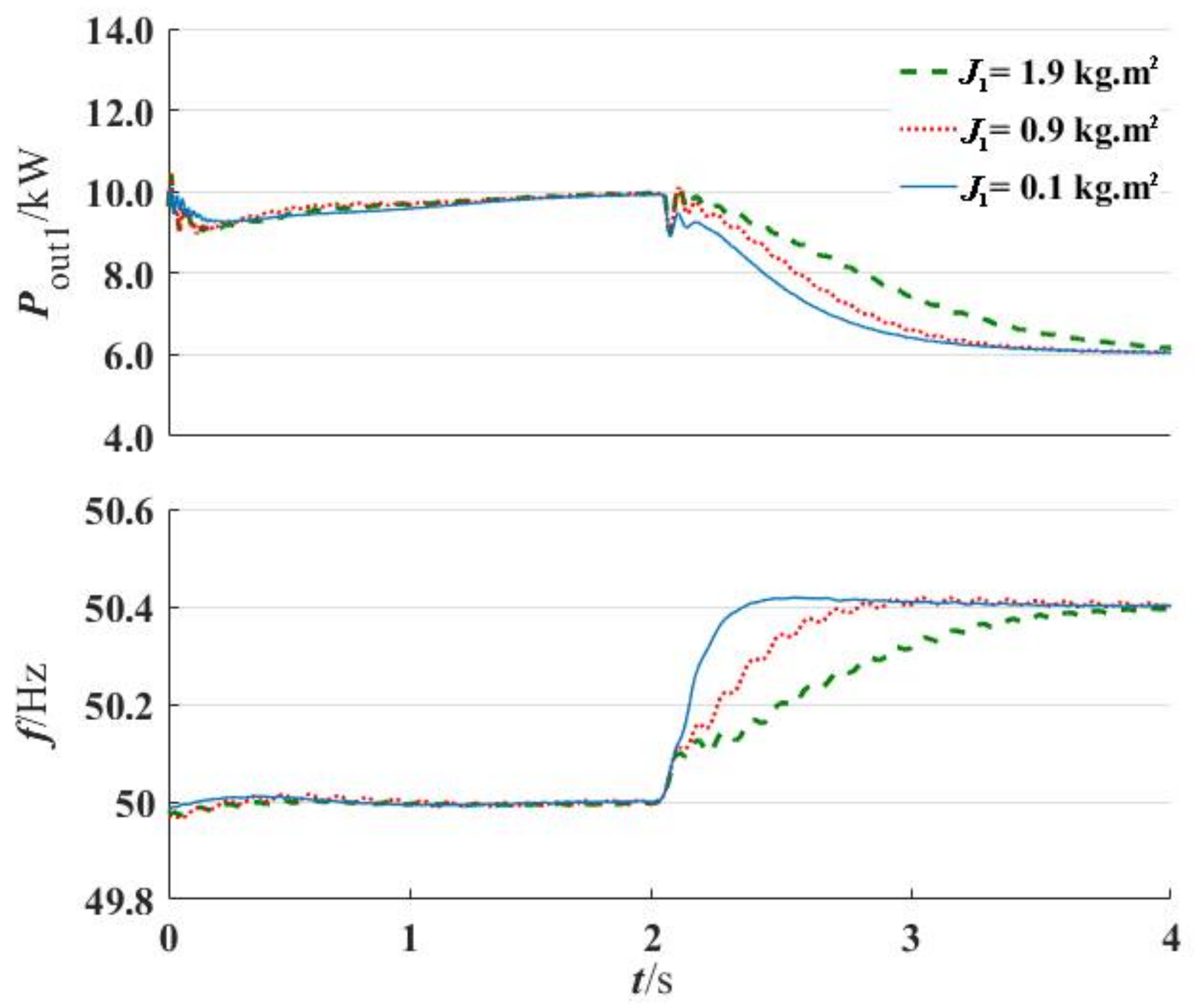
4.2. Matching Method of Inertia
5. Verification
5.1. Simulation Conditions and Parameters
5.2. Verification Process
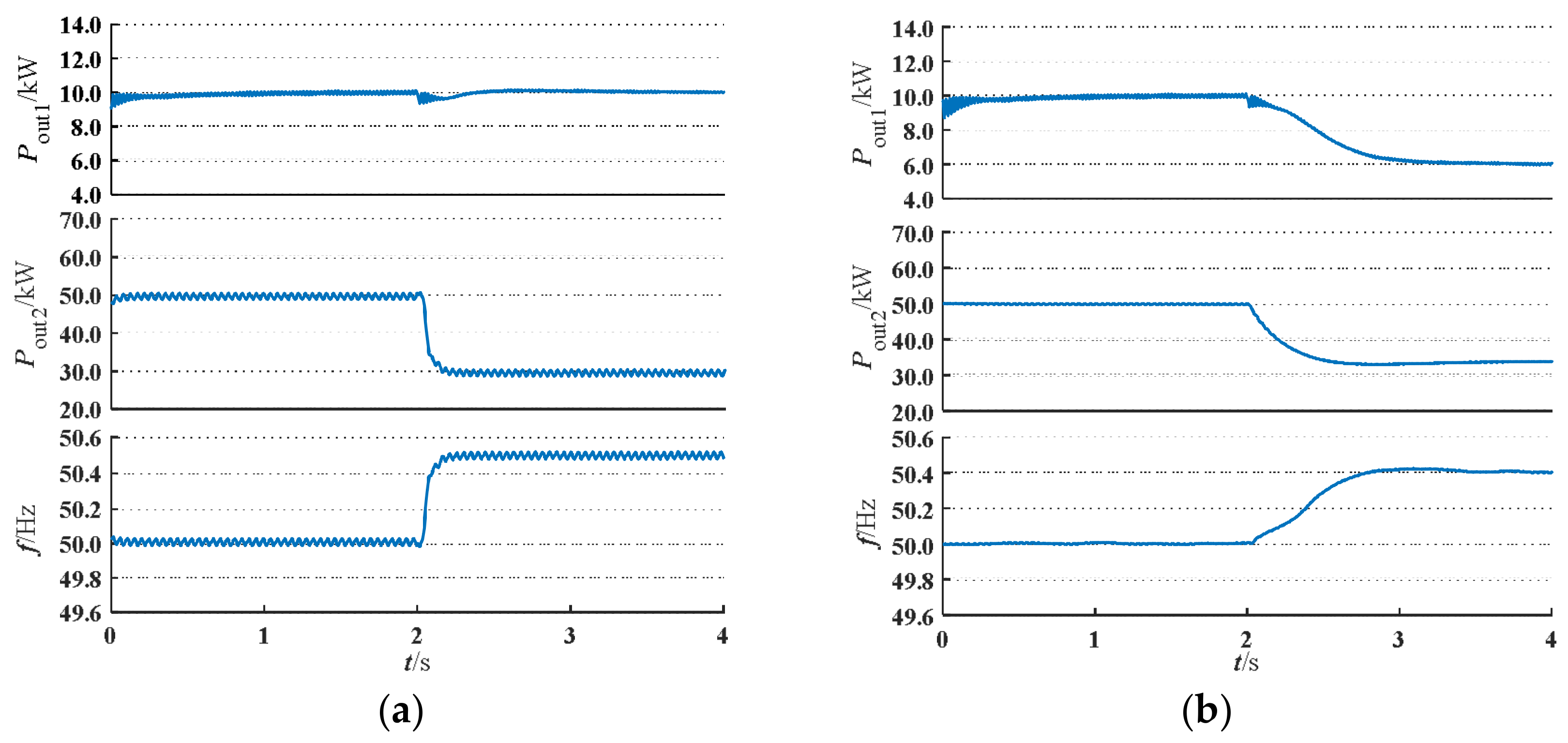
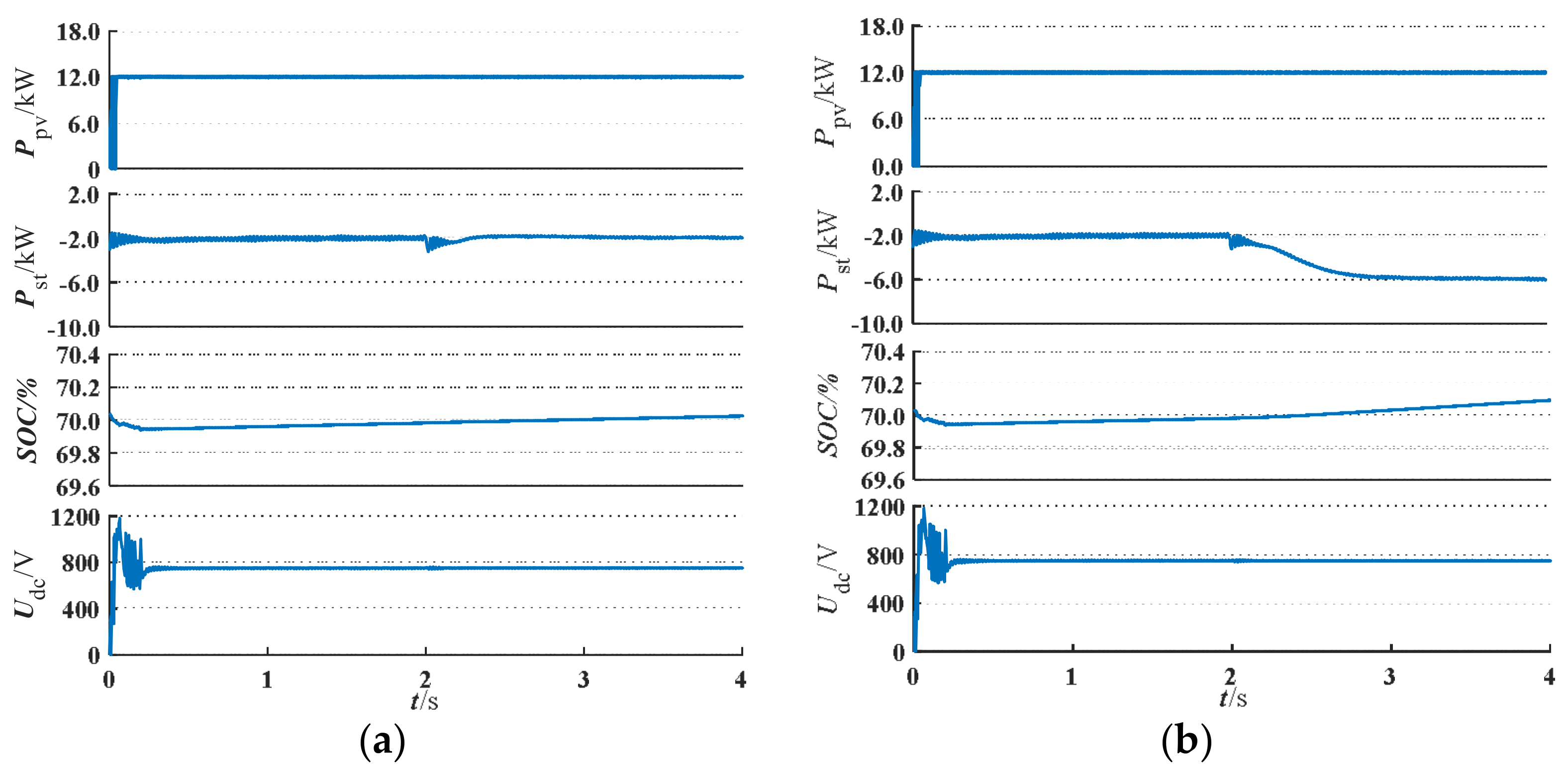
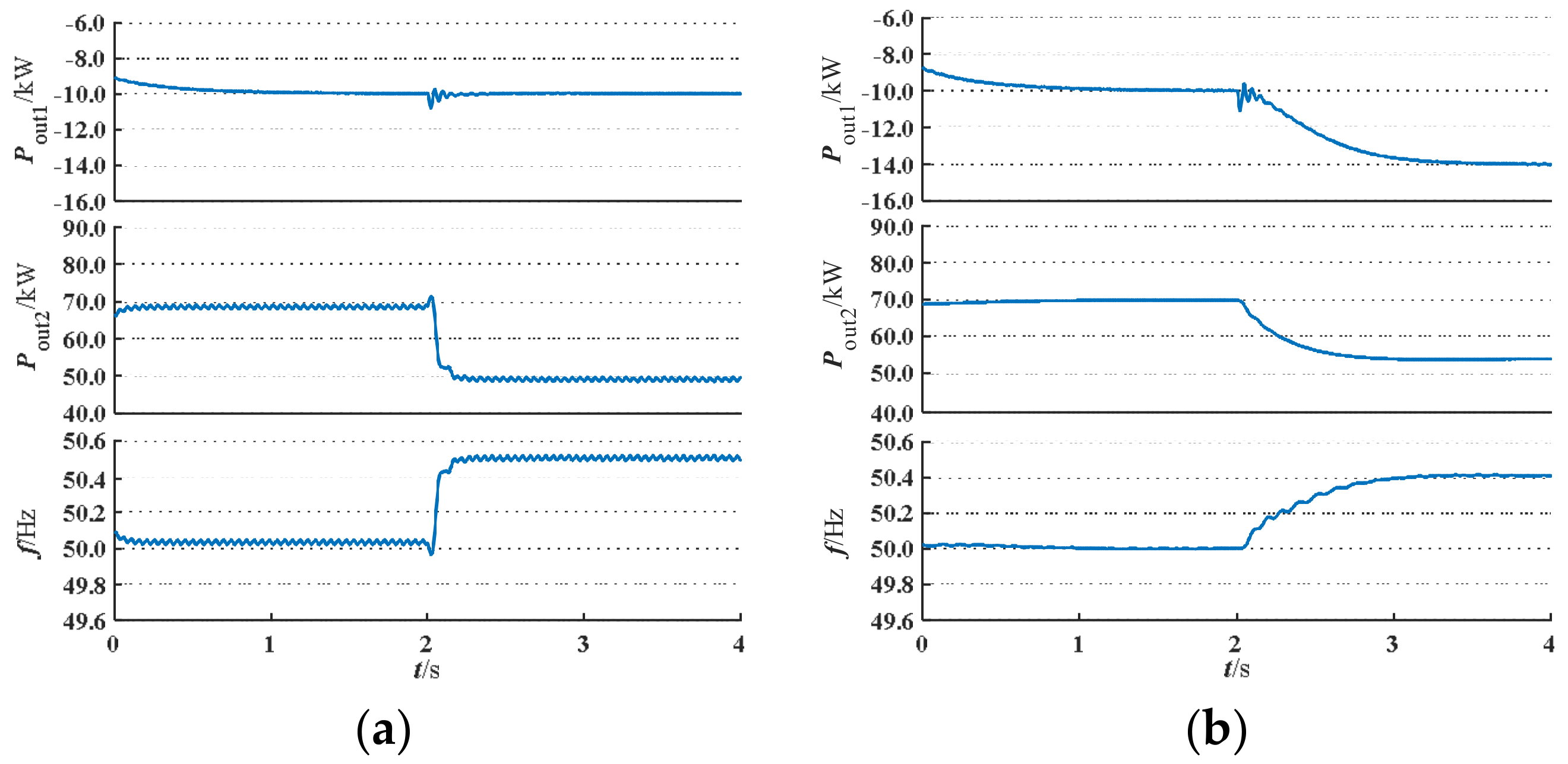
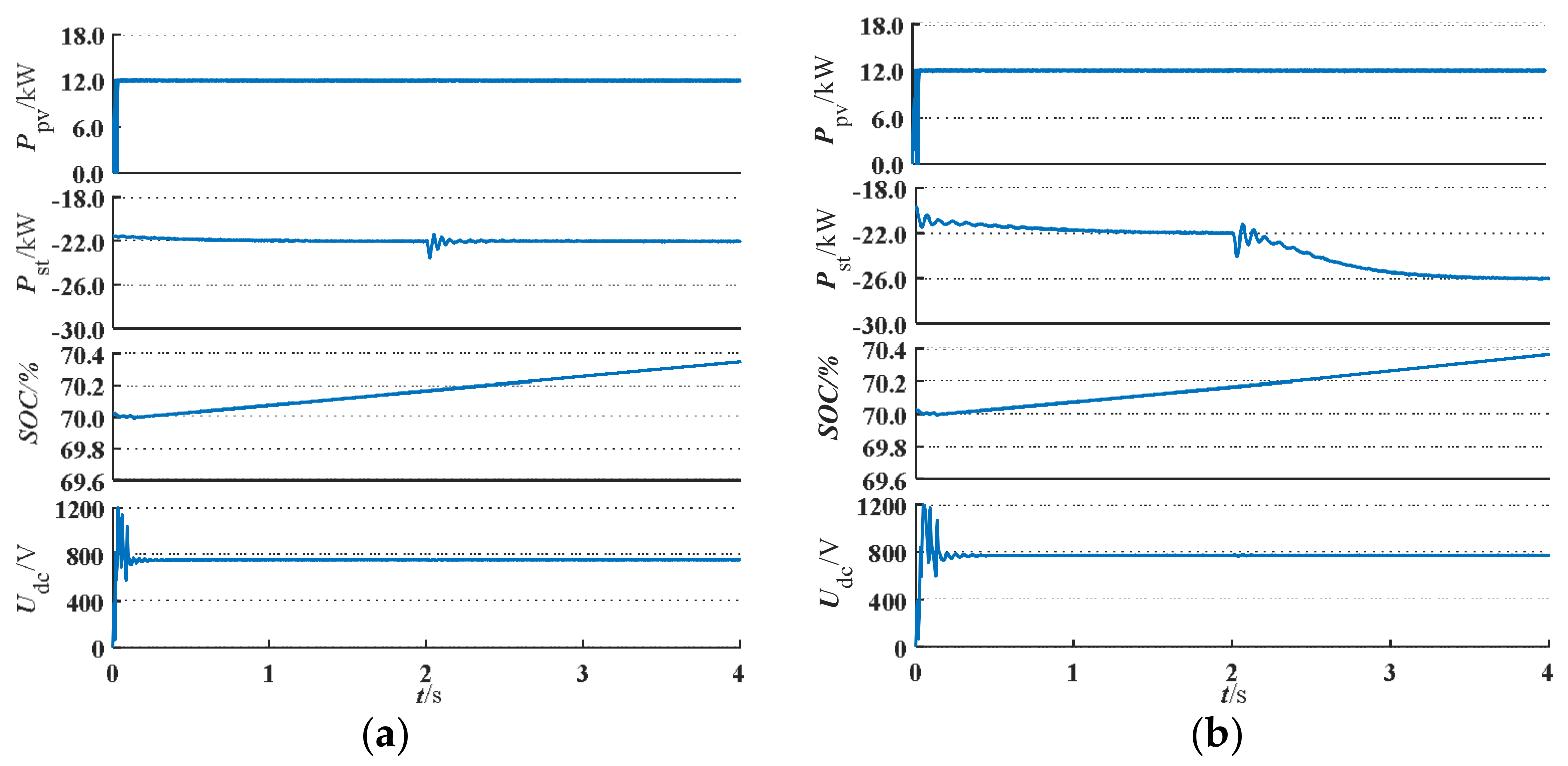
5.2.1. Verification of PV Storage Virtual Synchronous Generator System
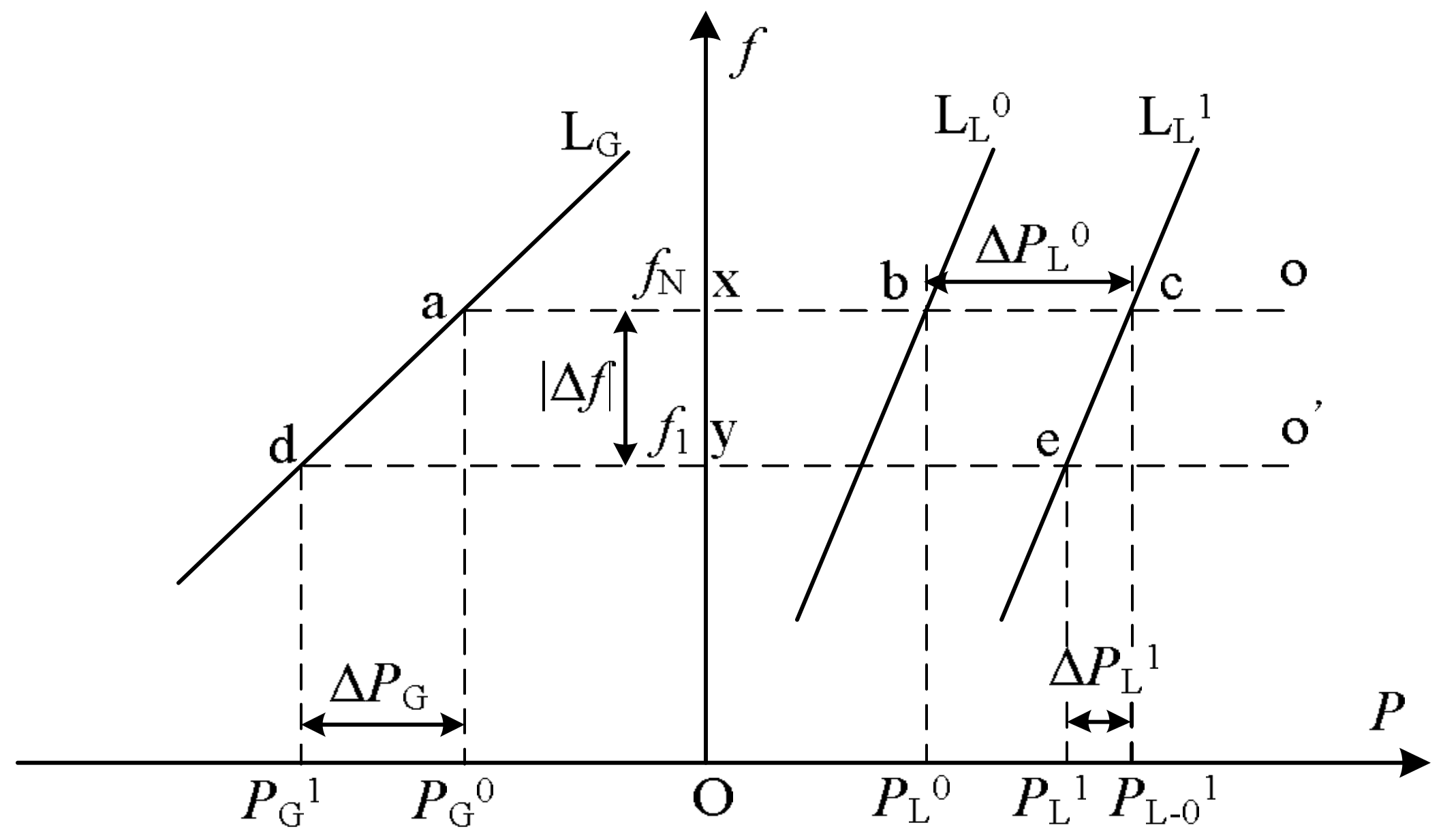
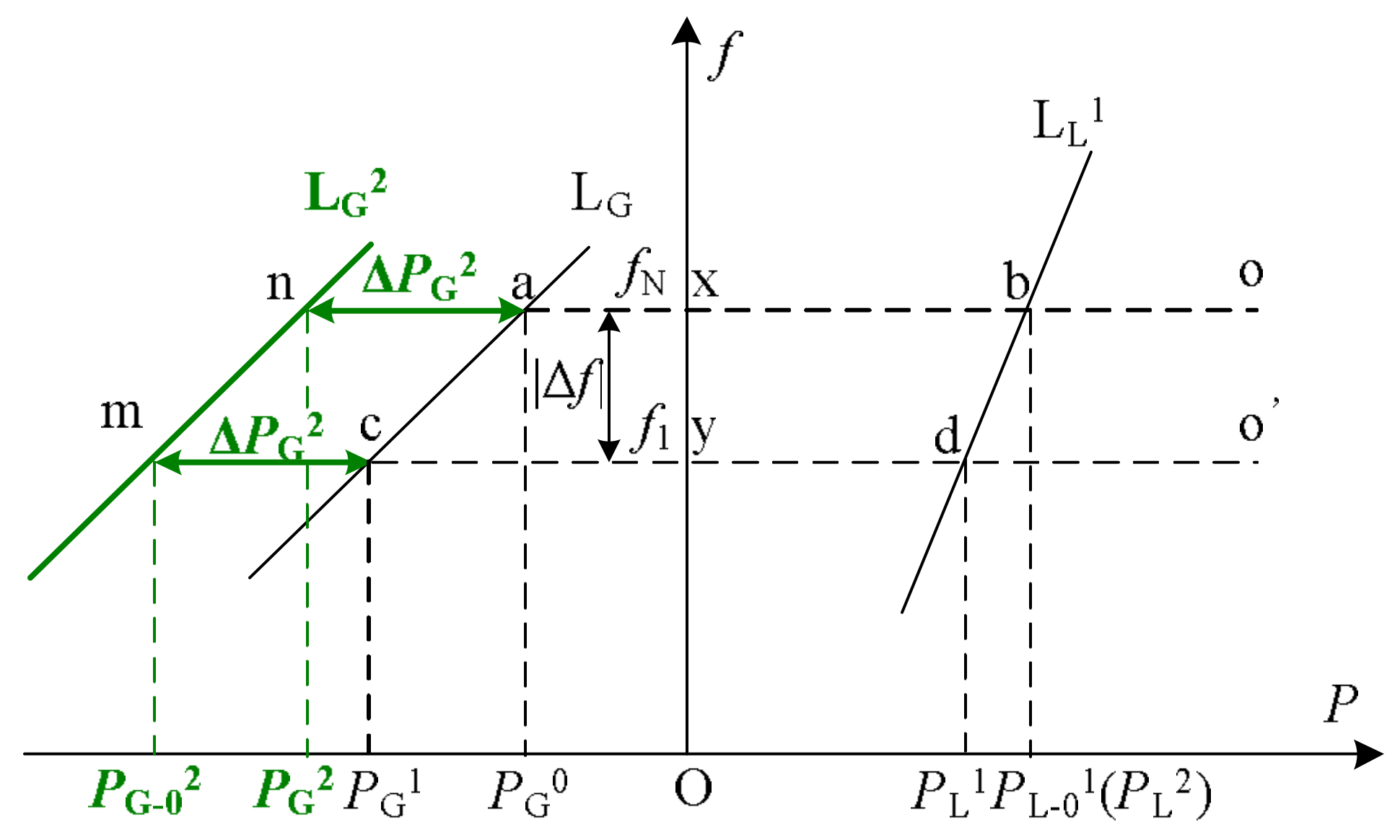
5.2.2. Verification of S-L Analysis Method
- The above operating conditions contain an input/output bidirectional devices (PV storage system) and involve bidirectional frequency regulation, which is possible to verify whether S-L analysis method is suitable for input/output bidirectional devices.
- The above operating conditions not only include the PV storage virtual synchronous machine system, but also include the traditional PV storage system, which is possible for verifying whether the S-L analysis method is applicable to different control strategies and devices.
- There are two power supplies involved in frequency regulation jointly in above operating conditions through which the S-L analysis method is available to a multi-power supply.
6. Conclusions
- The proposed S-L analysis method improved the traditional static frequency characteristic of the analysis method and it can qualitatively and quantitatively analyze the frequency regulation process (including primary frequency regulation and secondary frequency regulation) of input/output bidirectional devices and complex multi-power supply systems under different control strategy regardless of the operation mode (generator mode or motor mode).
- A distributed PV storage virtual synchronous generator system was established through the design and control of bidirectional DC-DC (chopper) and bidirectional converter. This kind of system can operate in a stable way in generator/motor dual mode with the bidirectional frequency regulation capability and the inertia characteristic of the synchronous generator, which satisfies the requests of State Grid Corporation of China (SGCC) and the autonomous power system.
- In order to mimic the actual microgrid characteristics accurately, a Synchronous Machine Grid Equivalent Model was designed. Additionally, for the purpose of realizing the compatibility between devices with inertia such as synchronous generators and virtual synchronous generators, an inertia matching method was proposed, which contributed to the stable operation of microgrid.
- The feasibility and correctness of the proposed PV storage virtual synchronous generator system, the S-L analysis method and the inertia matching method were verified through simulation experiments.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mahmoud, M.S.; Hussain, S.A.; Abido, M.A. Modeling and control of microgrid: An overview. J. Frankl. Inst. 2014, 351, 2822–2859. [Google Scholar] [CrossRef]
- Rana, M.M.; Li, L. An overview of distributed microgrid state estimation and control for smart grids. Sensors 2015, 15, 4302–4325. [Google Scholar] [CrossRef] [PubMed]
- Bacha, S.; Picault, D.; Burger, B.; Etxeberria-Otadui, I.; Martins, J. Photovoltaics in Microgrids: An Overview of Grid Integration and Energy Management Aspects. IEEE Ind. Electron. Mag. 2015, 9, 33–46. [Google Scholar] [CrossRef]
- Shahabi, M.; Haghifam, M.R.; Mohamadian, M.; Nabavi-Niaki, S.A. Microgrid Dynamic Performance Improvement Using a Doubly Fed Induction Wind Generator. IEEE Trans. Energy Convers. 2009, 24, 137–145. [Google Scholar] [CrossRef]
- Bae, S.; Kwasinski, A. Dynamic Modeling and Operation Strategy for a Microgrid with Wind and Photovoltaic Resources. IEEE Trans. Smart Grid 2012, 3, 1867–1876. [Google Scholar] [CrossRef]
- Van Roy, J.; Leemput, N.; Geth, F.; Buscher, J.; Salenbien, R.; Driesen, J. Electric vehicle charging in an office building microgrid with distributed energy resources. IEEE Trans. Sustain. Energy 2014, 5, 1389–1396. [Google Scholar] [CrossRef]
- Beer, S.; Gomez, T.; Dallinger, D.; Momber, I.; Marnay, C.; Stadler, C. An economic analysis of used electric vehicle batteries integrated into commercial building microgrids. IEEE Trans. Smart Grid 2012, 3, 517–525. [Google Scholar] [CrossRef]
- Tan, X.; Li, Q.; Wang, H. Advances and trends of energy storage technology in Microgrid. Int. J. Electr. Power Energy Syst. 2013, 44, 179–191. [Google Scholar] [CrossRef]
- Levron, Y.; Guerrero, J.M.; Beck, Y. Optimal Power Flow in Microgrids with Energy Storage. IEEE Trans. Power Syst. 2013, 28, 3226–3234. [Google Scholar] [CrossRef]
- Srivastava, A.; Kumar, A.; Schulz, N. Impact of Distributed Generations with Energy Storage Devices on the Electric Grid. IEEE Syst. J. 2012, 6, 110–117. [Google Scholar] [CrossRef]
- Oudalov, A.; Chartouni, D.; Ohler, C. Optimizing a battery energy storage system for primary frequency control. IEEE Trans. Power Syst. 2007, 22, 1259–1266. [Google Scholar] [CrossRef]
- Serban, I.; Marinescu, C. Control strategy of three-phase battery energy storage systems for frequency support in microgrids and with uninterrupted supply of local loads. IEEE Trans. Power Electron. 2014, 29, 5010–5020. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, W.; Hug, G.; Kar, S.; Li, Z. Cooperative control of distributed energy storage systems in a microgrid. IEEE Trans. Smart Grid 2015, 6, 238–248. [Google Scholar] [CrossRef]
- Zhong, Q.-C. Power electronics-enabled autonomous power systems: Architecture and technical routes. IEEE Trans. Ind. Electron. 2017, 64, 5907–5918. [Google Scholar] [CrossRef]
- Von Appen, J.; Stetz, T.; Braun, M.; Schmiegel, A. Local Voltage Control Strategies for PV Storage Systems in Distribution Grids. IEEE Trans. Smart Grid 2014, 5, 1002–1009. [Google Scholar] [CrossRef]
- Himour, K.; Ghedamsi, K.; Berkouk, E.M. Supervision and control of grid connected PV-Storage systems with the five level diode clamped inverter. Energy Convers. Manag. 2014, 77, 98–107. [Google Scholar] [CrossRef]
- Choudar, A.; Boukhetala, D.; Barkat, S.; Brucker, J.M. A local energy management of a hybrid PV-storage based distributed generation for microgrids. Energy Convers. Manag. 2015, 90, 21–33. [Google Scholar] [CrossRef]
- Bullich-Massagué, E.; Aragüés-Peñalba, M.; Sumper, A.; Boix-Aragones, O. Active power control in a hybrid PV-storage power plant for frequency support. Sol. Energy 2016, 14. [Google Scholar] [CrossRef]
- Datta, M.; Senjyu, T. Fuzzy control of distributed PV inverters/energy storage systems/electric vehicles for frequency regulation in a large power system. IEEE Trans. Smart Grid 2013, 4, 479–488. [Google Scholar] [CrossRef]
- Grainger, J.J.; Stevenson, W.D.J. Power System Analysis; Stephen, E.H., Ed.; McGraw-Hill: Hightstown, NJ, USA, 1994; pp. 562–572. ISBN 0-07-113338-0. [Google Scholar]
- Ozbay, H.; Oncu, S.; Kesler, M. SMC-DPC based active and reactive power control of grid-tied three phase inverter for PV systems. Int. J. Hydrog. Energy 2017, 42, 17713–17722. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Anderson, M.; Fouad, A.A. Power System Control and Stability; Publishing House of Electronics Industry: Beijing, China; pp. 7–13. ISBN 978-7-121-16748-5.
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q.C. Small-signal modeling and parameters design for virtual synchronous generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. Small-signal modeling and parametric sensitivity of a virtual synchronous machine in islanded operation. Int. J. Electr. Power Energy Syst. 2015, 72, 3–15. [Google Scholar] [CrossRef]
- Moradi, M.H.; Reisi, A.R. A hybrid maximum power point tracking method for photovoltaic systems. Sol. Energy 2011, 85, 2965–2976. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| Parameters of system | The maximum output power of the PV array, Pmax | 10 kW |
| The rated capacity of the PV storage virtual synchronous generator system, S1N | 20 kVA | |
| The rated capacity of microgrid, S2N | 80 kVA | |
| The initial state of charge of the energy storage, SOC | 70% | |
| The reference value of DC voltage, Udc* | 750 V | |
| The rated phase voltage of power system, Ur-ph | 220 V | |
| The sampling frequency of power system, fS | 10 kHz | |
| The rated frequency of power system, fN | 50 Hz | |
| Filter parameters | The series inductance of the filter, LS | 1.00 mH |
| The parallel capacitance of the filter, CS | 500 μF | |
| The series resistance of the filter, RS | 0.01 Ω | |
| Line parameters | Line inductance, Lr | 1.00 mH |
| Line capacitance, Cr | 0.01 μF | |
| Control parameters | The active droop coefficient of the PV storage system, | 0.0001 |
| The reactive droop coefficient of the PV storage system, | 0.000025 | |
| The proportionality factor of PQ control power outer loop, PP-PQ | 6 | |
| The integration factor of PQ control power outer loop, IP-PQ | 15 | |
| The proportionality factor of PQ control current inner loop, PI-PQ | 3 | |
| The integration factor of PQ control current inner loop, II-PQ | 0 | |
| The proportionality factor of power outer loop in voltage and current double closed-loop control, PU-UI | 4 | |
| The integration factor of power outer loop in voltage and current double closed-loop control, IU-UI | 17 | |
| The proportionality factor of current inner loop in voltage and current double closed-loop control, PI-UI | 5 | |
| The integration factor of current inner loop in voltage and current double closed-loop control, II-UI | 1 | |
| The virtual Inertia of the PV storage virtual synchronous generator system, J1 | 0.9 kgm2 | |
| The virtual Inertia of the Synchronous Machine Grid Equivalent Model, J2 | 3.6 kgm2 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Zhang, X.; Zhang, B.; Ma, Y.; Wu, M. Research on Distributed PV Storage Virtual Synchronous Generator System and Its Static Frequency Characteristic Analysis. Appl. Sci. 2018, 8, 532. https://doi.org/10.3390/app8040532
Yan X, Zhang X, Zhang B, Ma Y, Wu M. Research on Distributed PV Storage Virtual Synchronous Generator System and Its Static Frequency Characteristic Analysis. Applied Sciences. 2018; 8(4):532. https://doi.org/10.3390/app8040532
Chicago/Turabian StyleYan, Xiangwu, Xueyuan Zhang, Bo Zhang, Yanjun Ma, and Ming Wu. 2018. "Research on Distributed PV Storage Virtual Synchronous Generator System and Its Static Frequency Characteristic Analysis" Applied Sciences 8, no. 4: 532. https://doi.org/10.3390/app8040532
APA StyleYan, X., Zhang, X., Zhang, B., Ma, Y., & Wu, M. (2018). Research on Distributed PV Storage Virtual Synchronous Generator System and Its Static Frequency Characteristic Analysis. Applied Sciences, 8(4), 532. https://doi.org/10.3390/app8040532