An Automatic Navigation System for Unmanned Surface Vehicles in Realistic Sea Environments



Abstract
1. Introduction
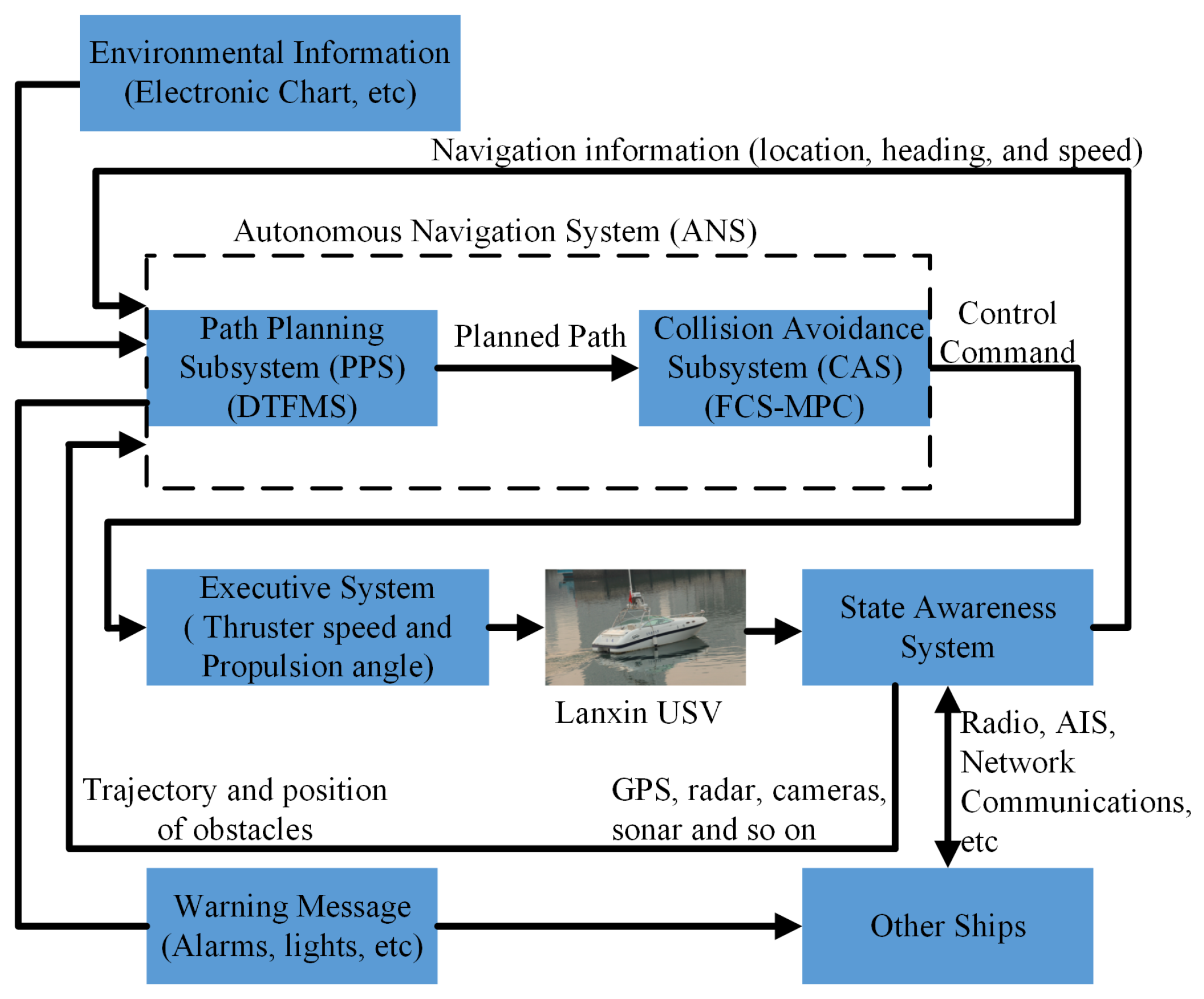
2. The Overview of Unmanned Surface Vehicle System
- The state information of the obstacle is known exactly.
- We have real-time detection of the USV’s position, heading, and velocity.
- Global information comes from the electronic chart.
- The mathematical model of the USV can be used to predict future trajectories to evaluate the effect of control commands.
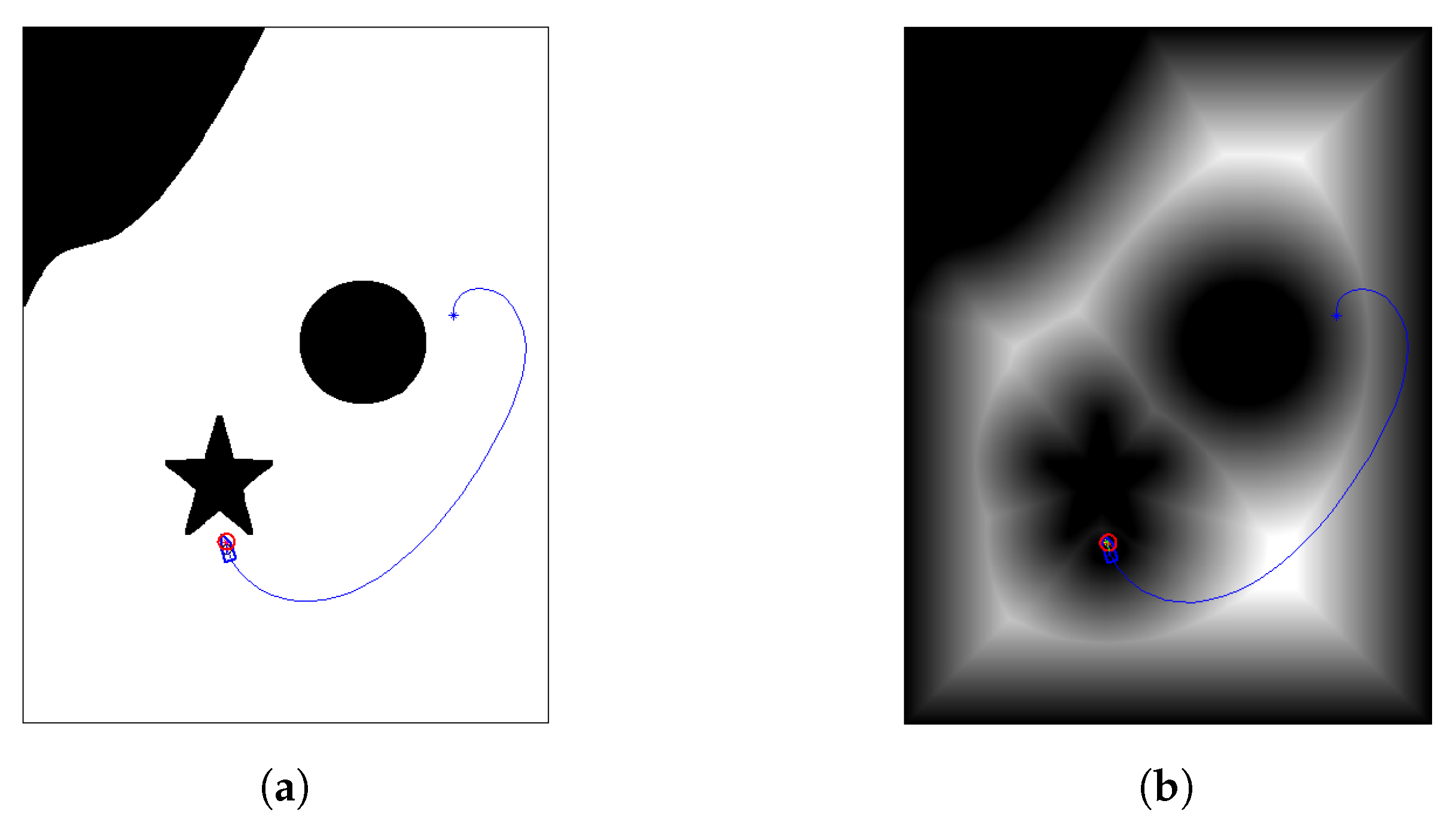
3. The Static Environment Modeling and Path Planning
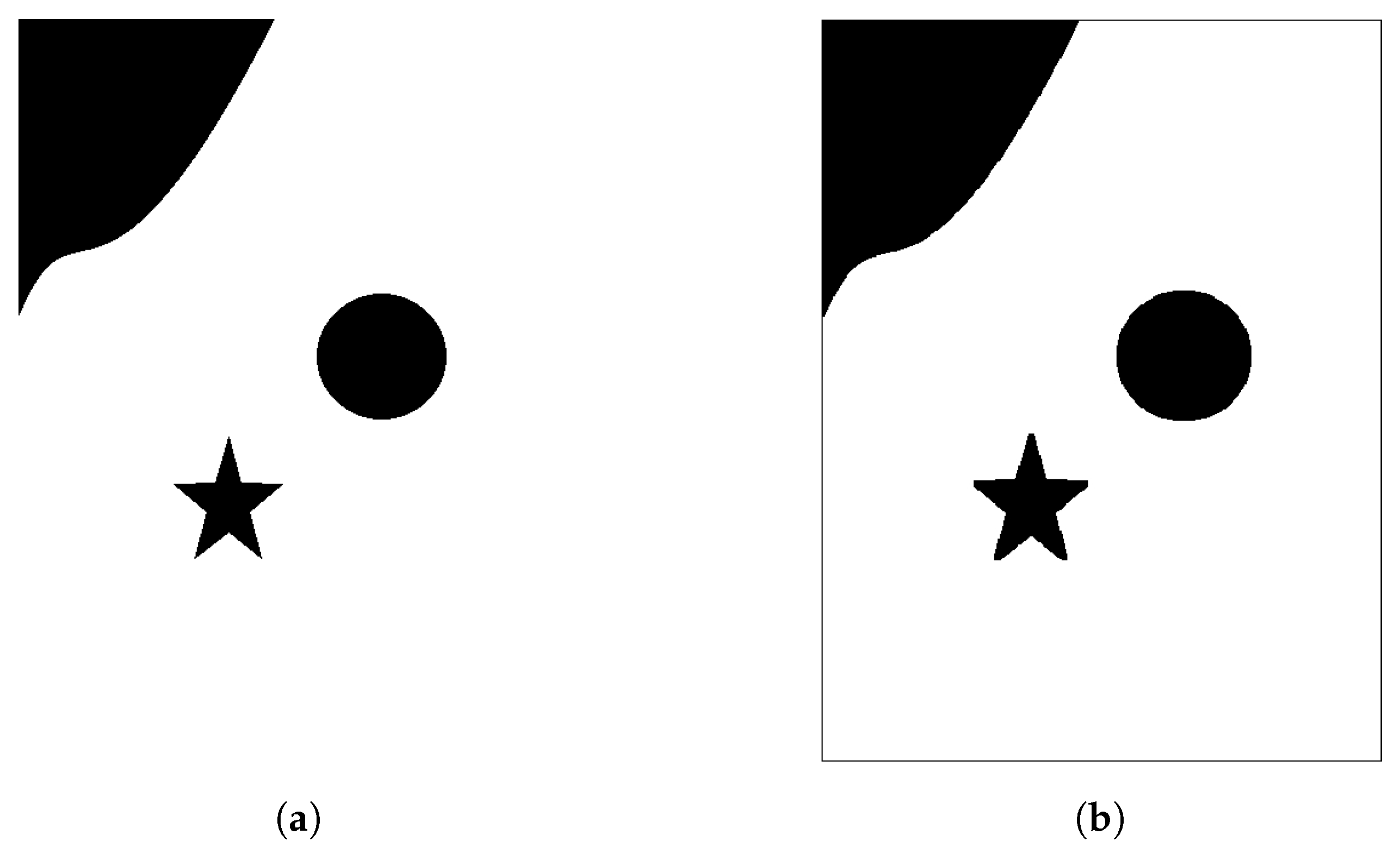
3.1. Simulation Environmental
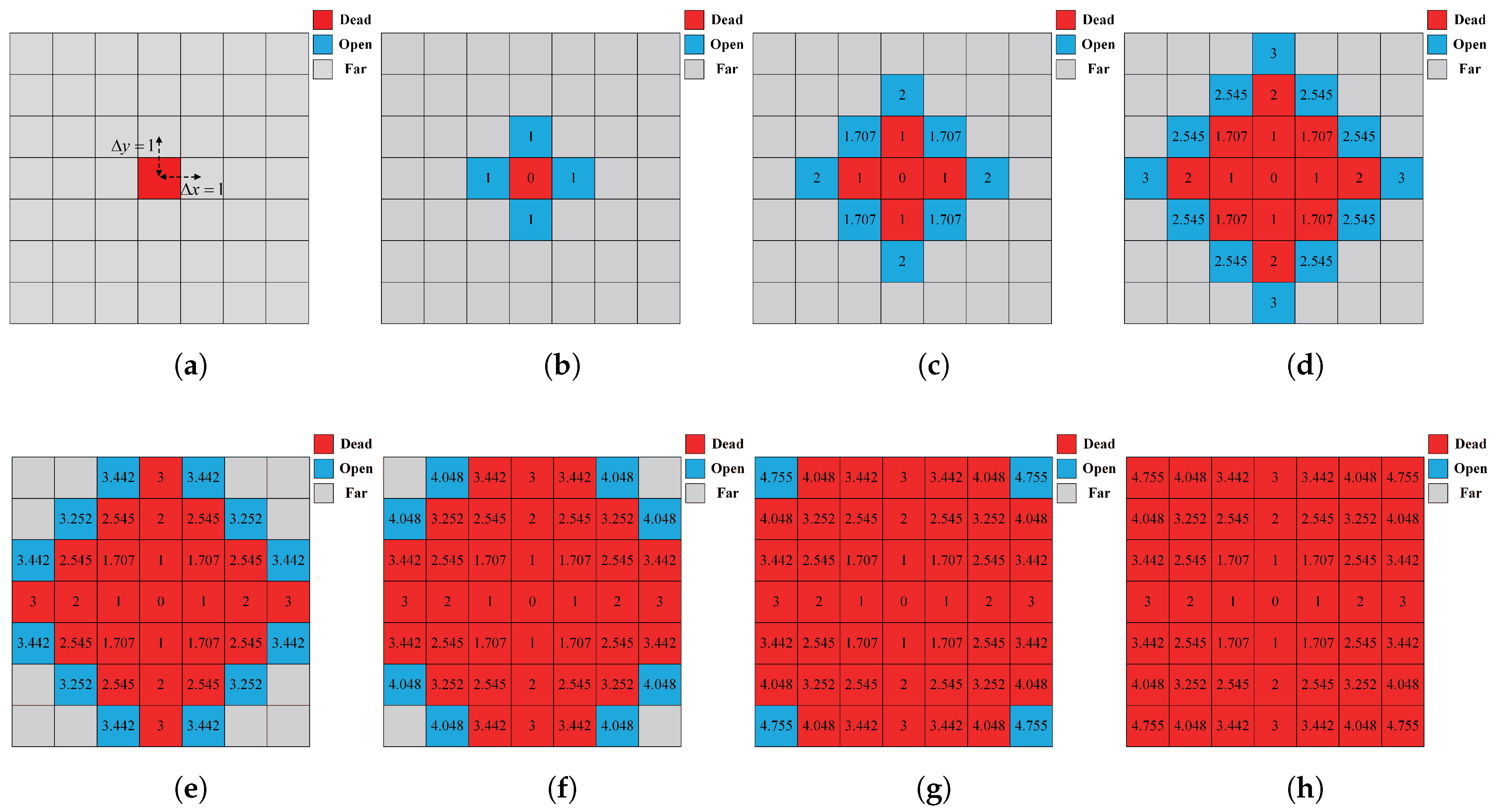
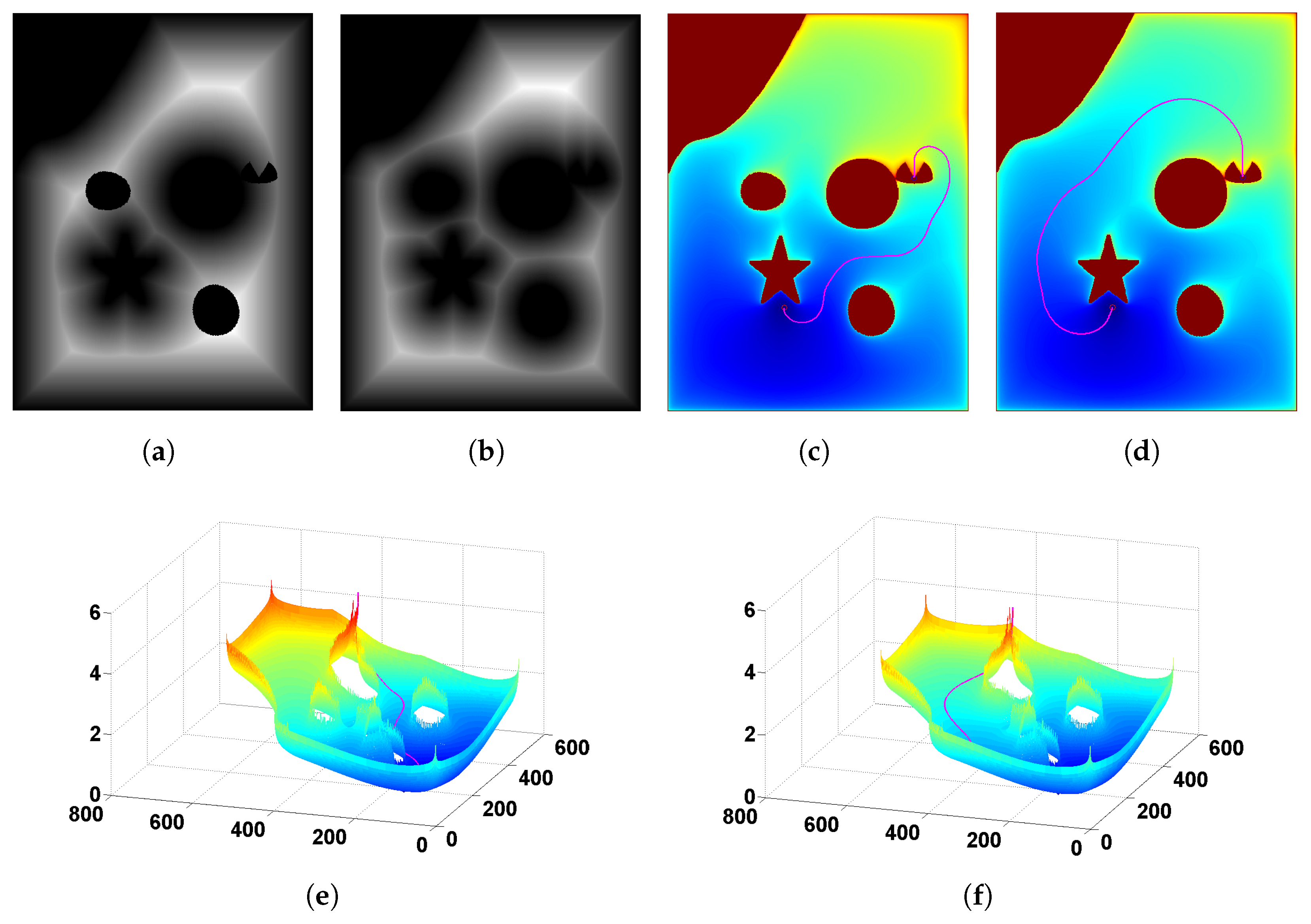
3.2. The Fast Marching Method
- Dead (marked as red): indicates that the arrival time value of the grid point has been calculated and determined;
- Open (marked as blue): indicates that the arrival time value of the grid point is an estimated value and may be changed;
- Far (marked as gray): indicates that the arrival time value of the grid point is unknown.
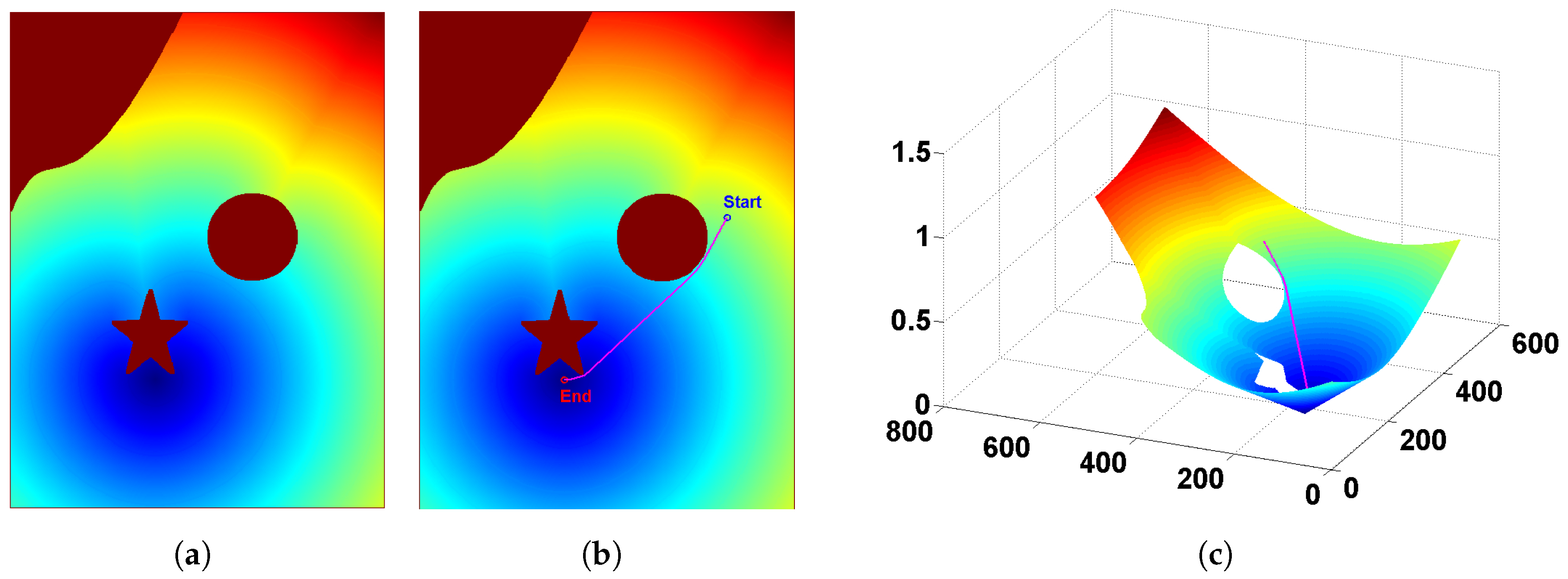
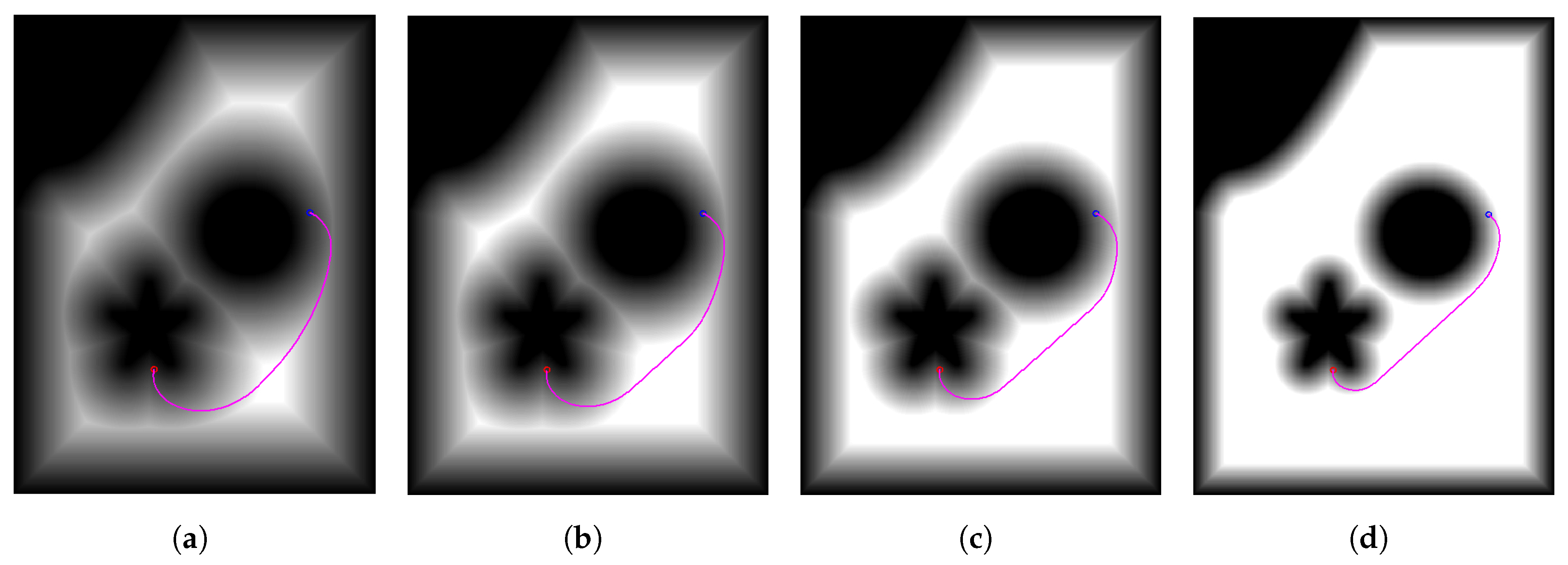
3.3. The Tunable Fast Marching Square Method
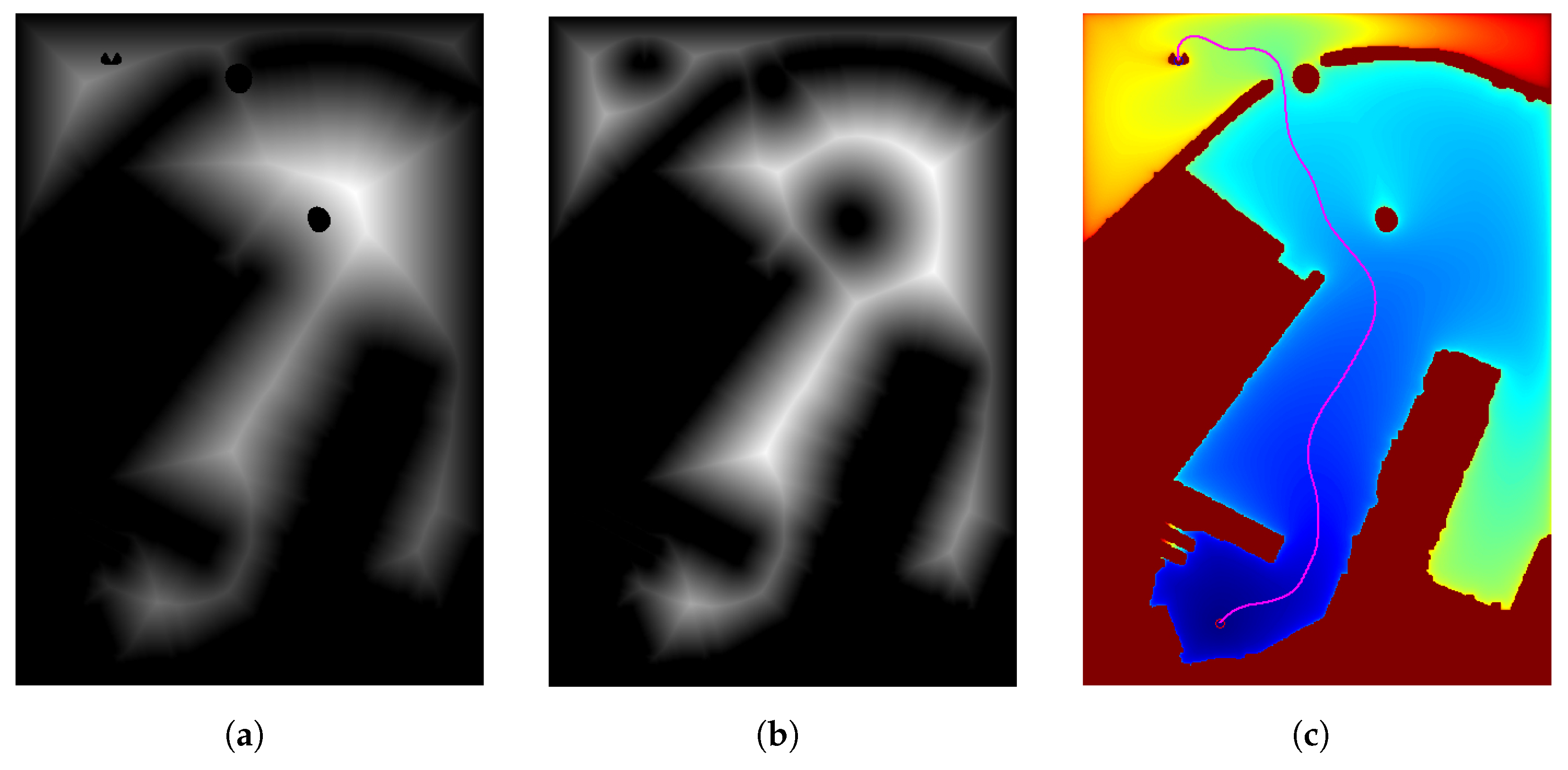
3.4. The Realistic Sea Environment Model
4. Collision Avoidance System
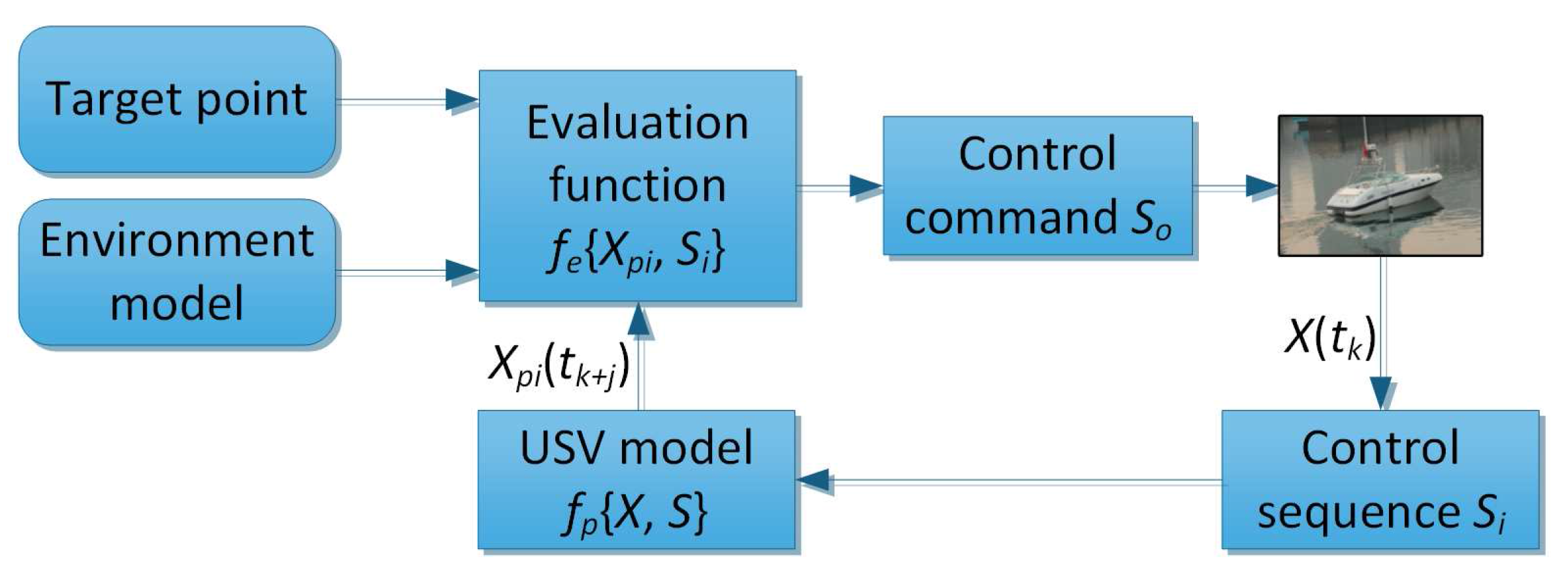
4.1. Finite Control Set Model Predictive Control of the CAS
4.2. Prediction Model of USV
- The environment force can be neglected in the model;
- The inertia, added mass, and damping matrices are diagonal.
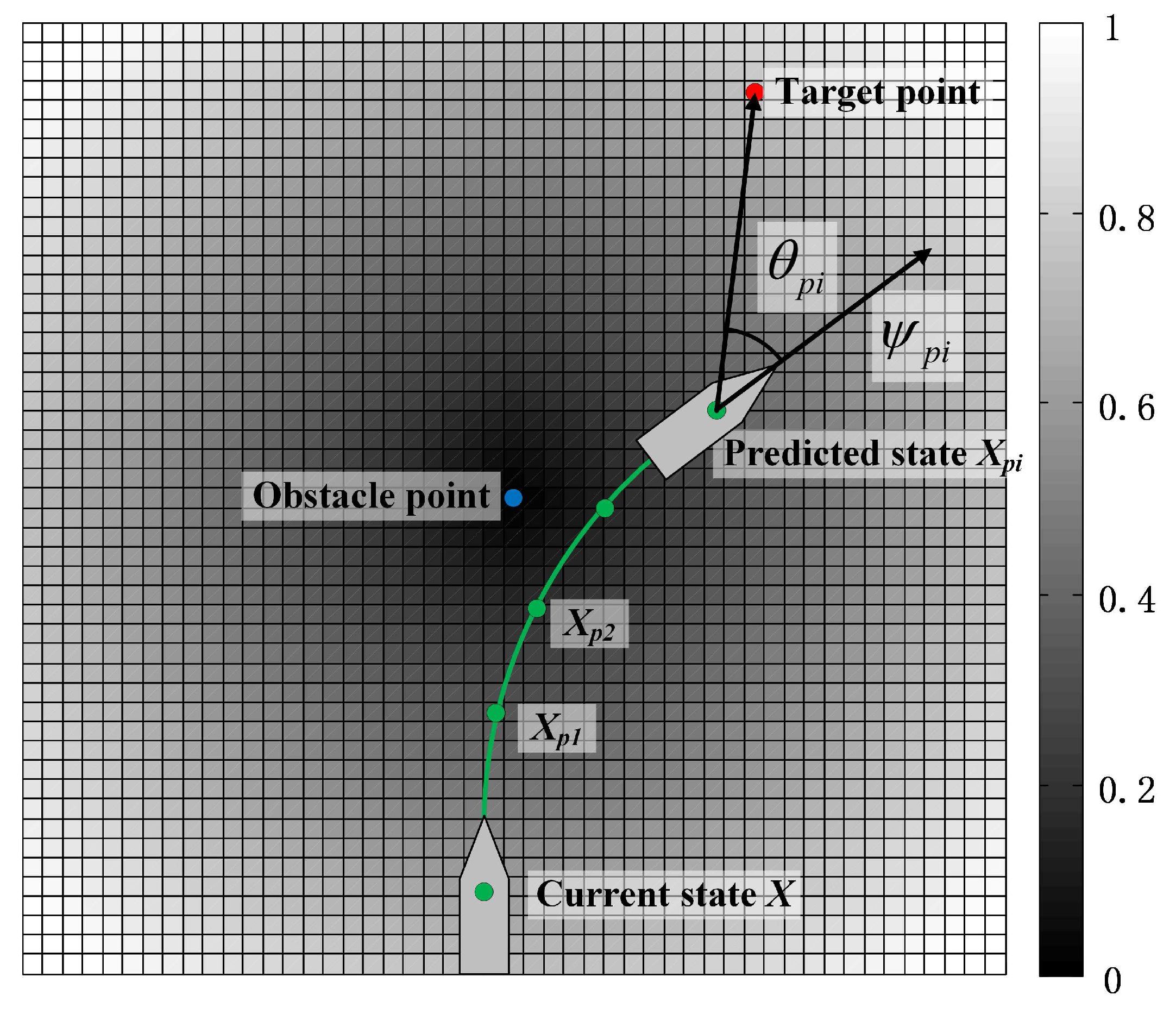
4.3. Control Behaviors and Prediction of the USV Trajectory
4.4. Evaluation Function
4.4.1. Attainability Subfunction
4.4.2. Safety Subfunction
4.4.3. Stability Subfunction
4.4.4. Rapidity Subfunction
4.5. Stop Distance and Hazard
4.6. Dynamic Target
5. Dynamic Environment Modeling and Path Re-Planning
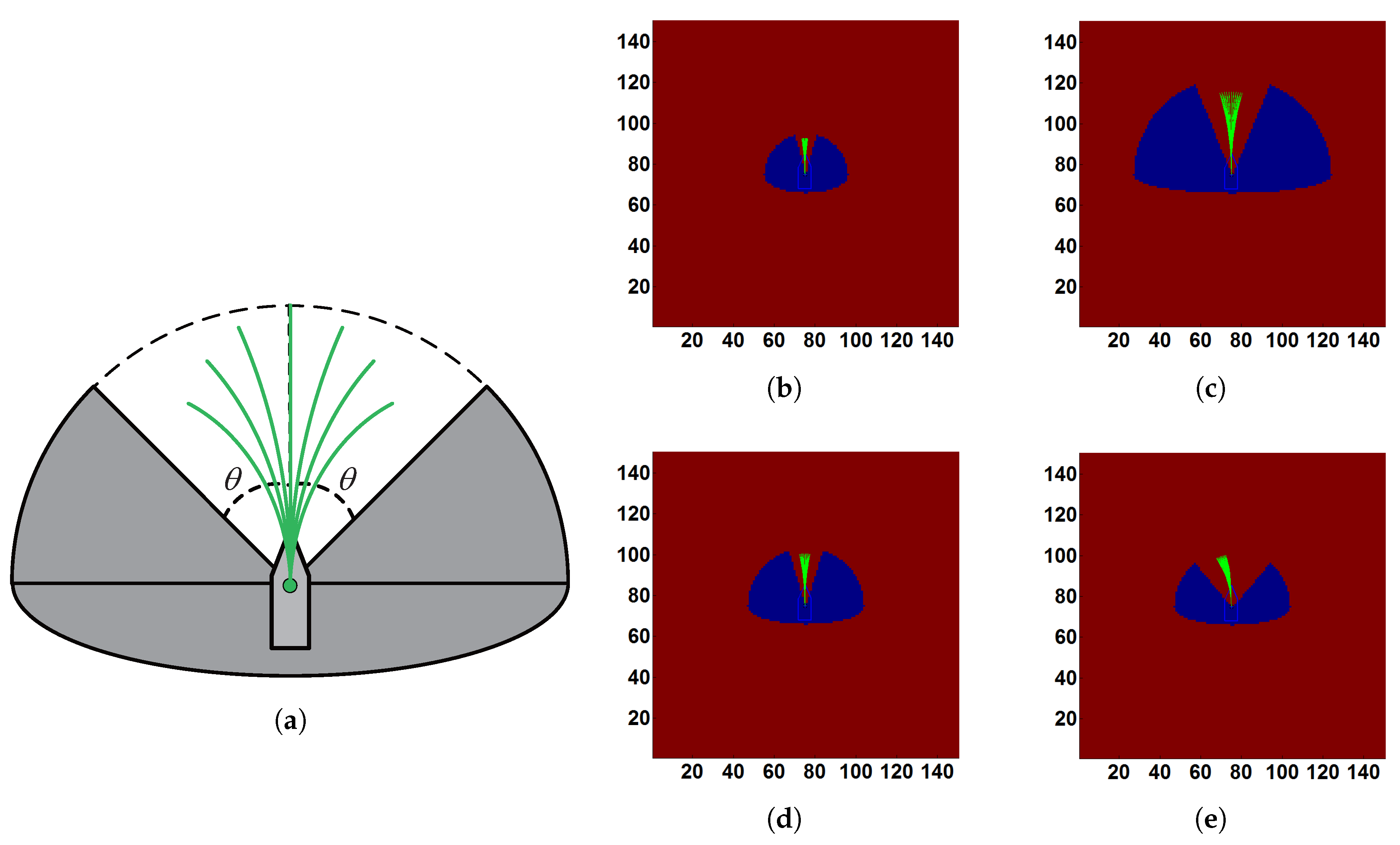
5.1. The Dynamic Domain Tunable Fast Marching Square Method
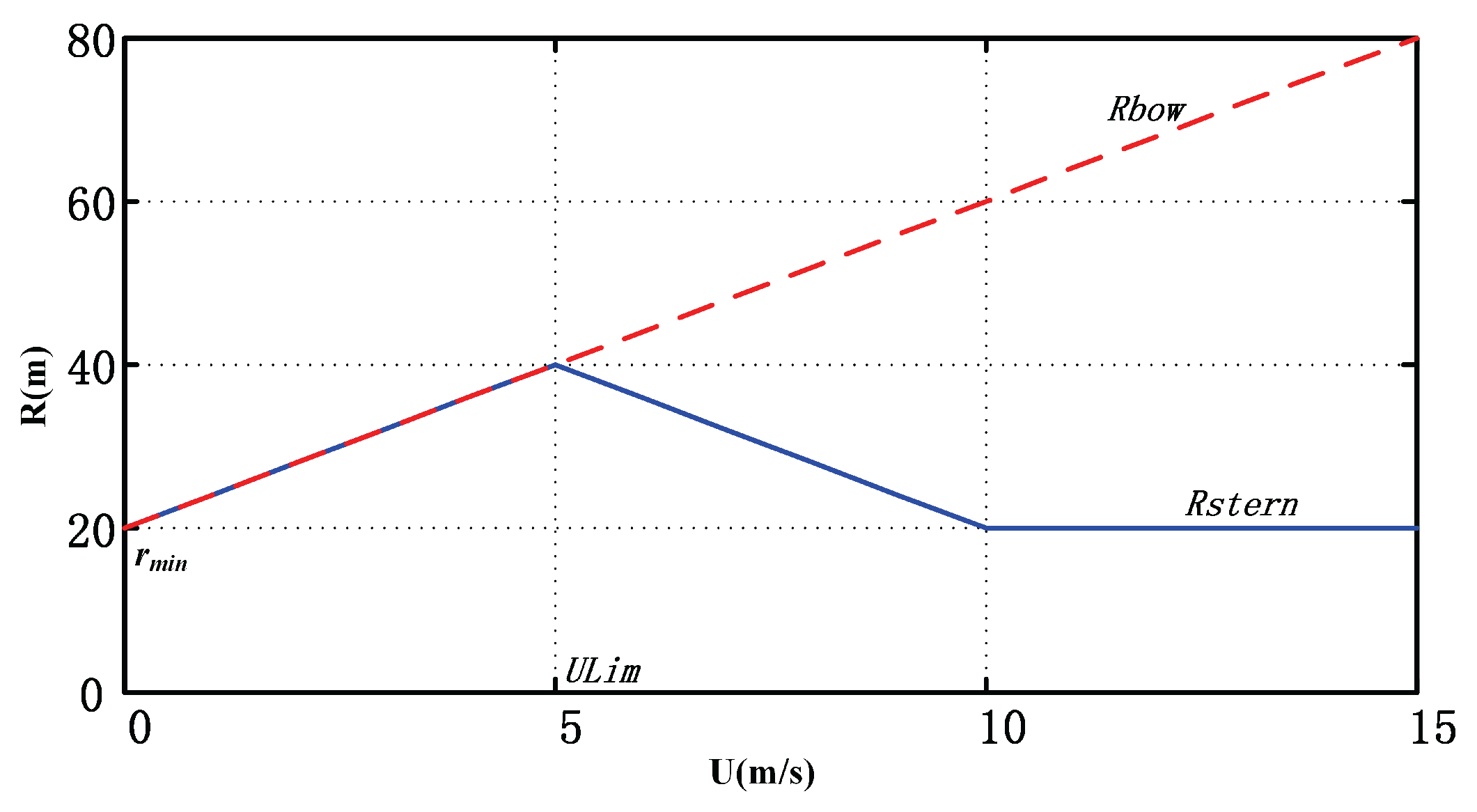
5.1.1. Own Vessel Dynamic Domain Model
5.1.2. Target Vessel Dynamic Domain Model
5.2. The Process of Path Re-Planning
6. Simulation Study and Discussion
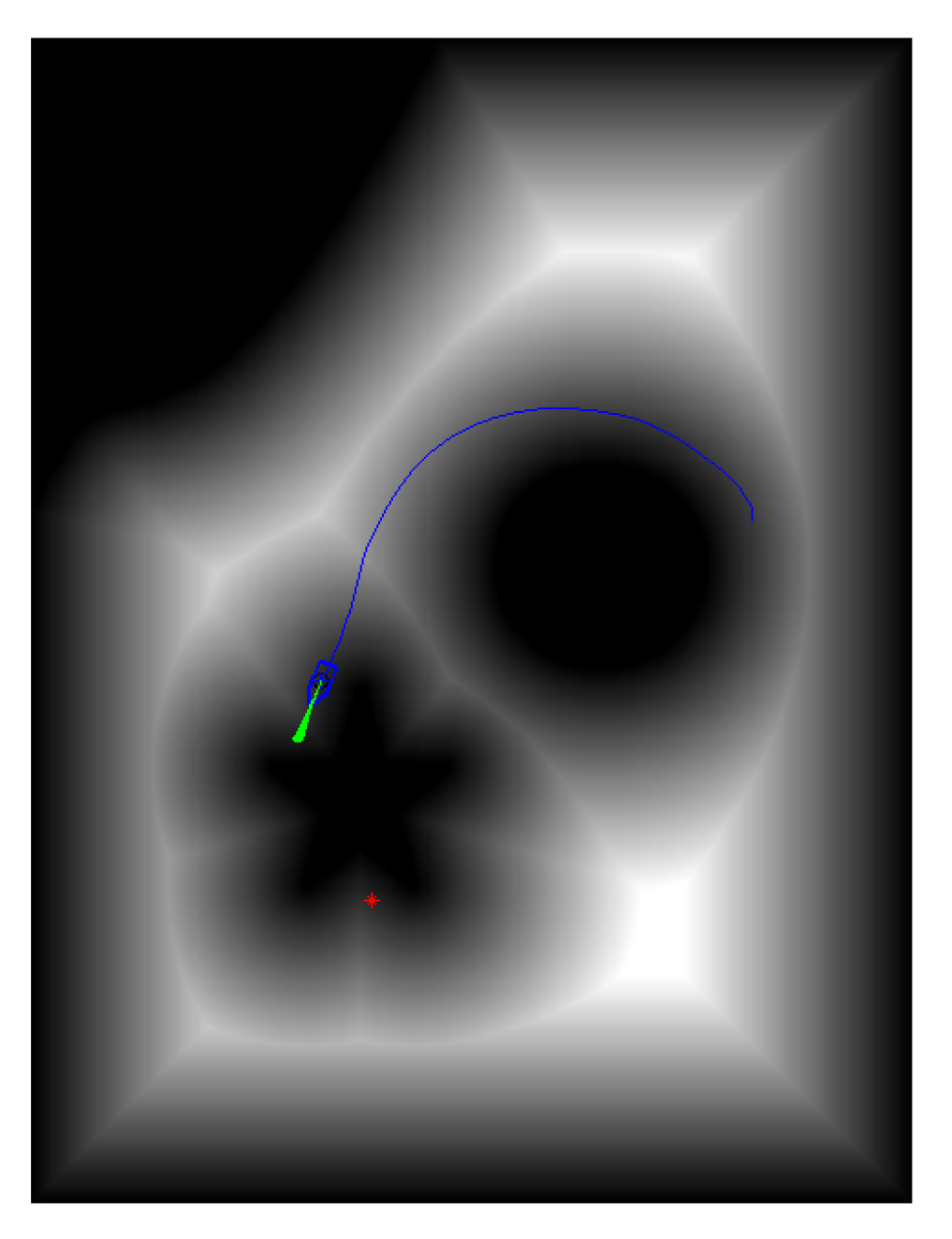
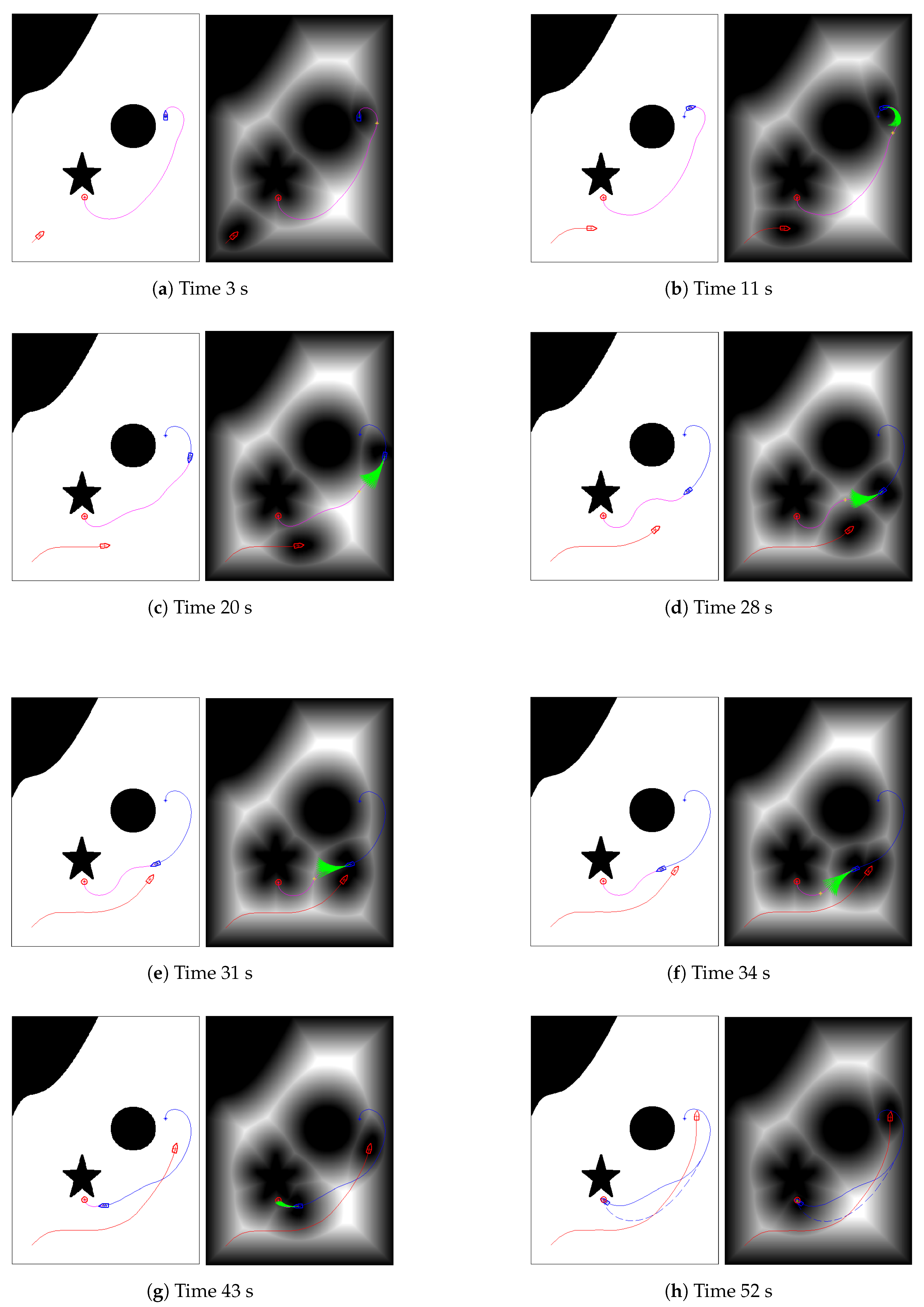
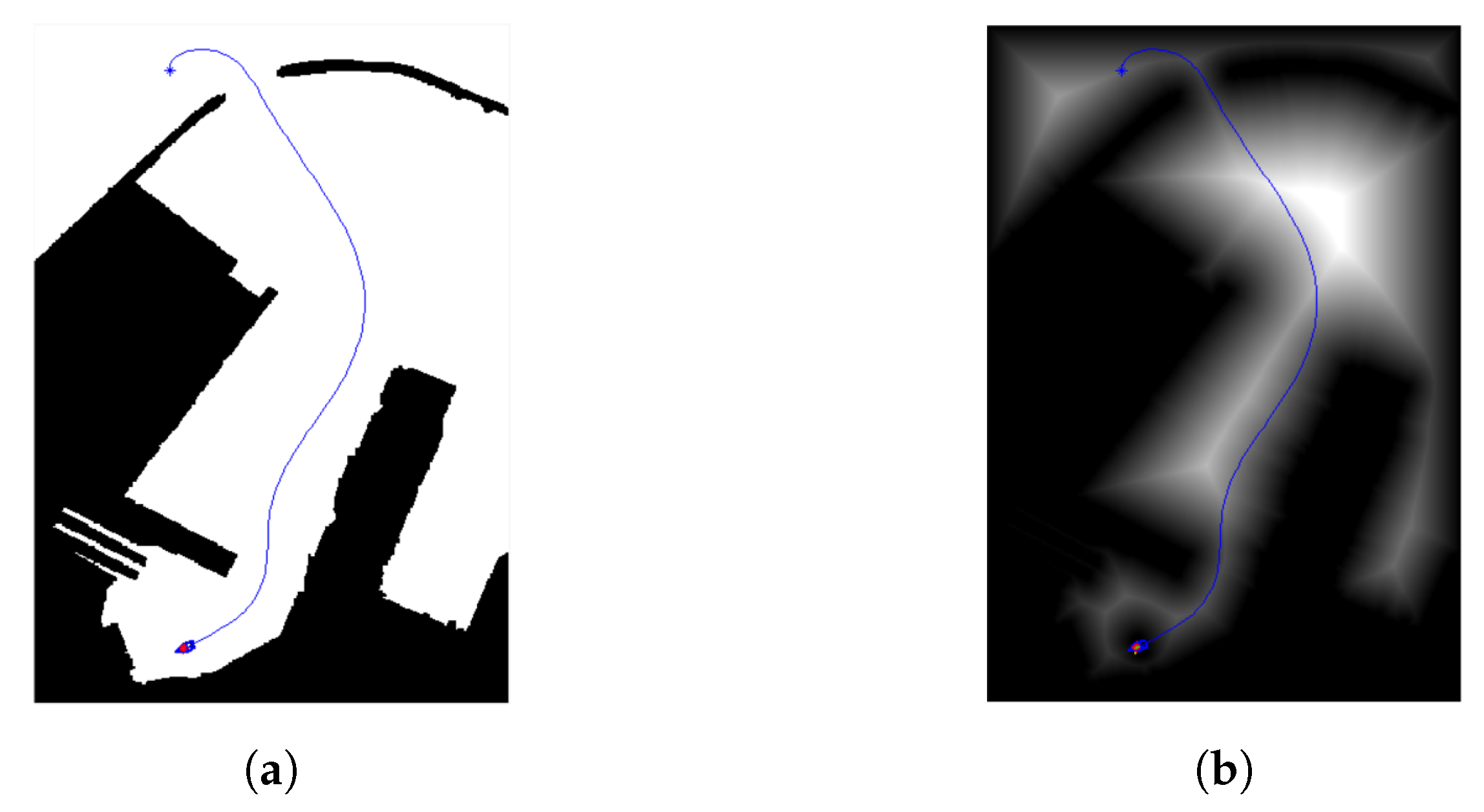
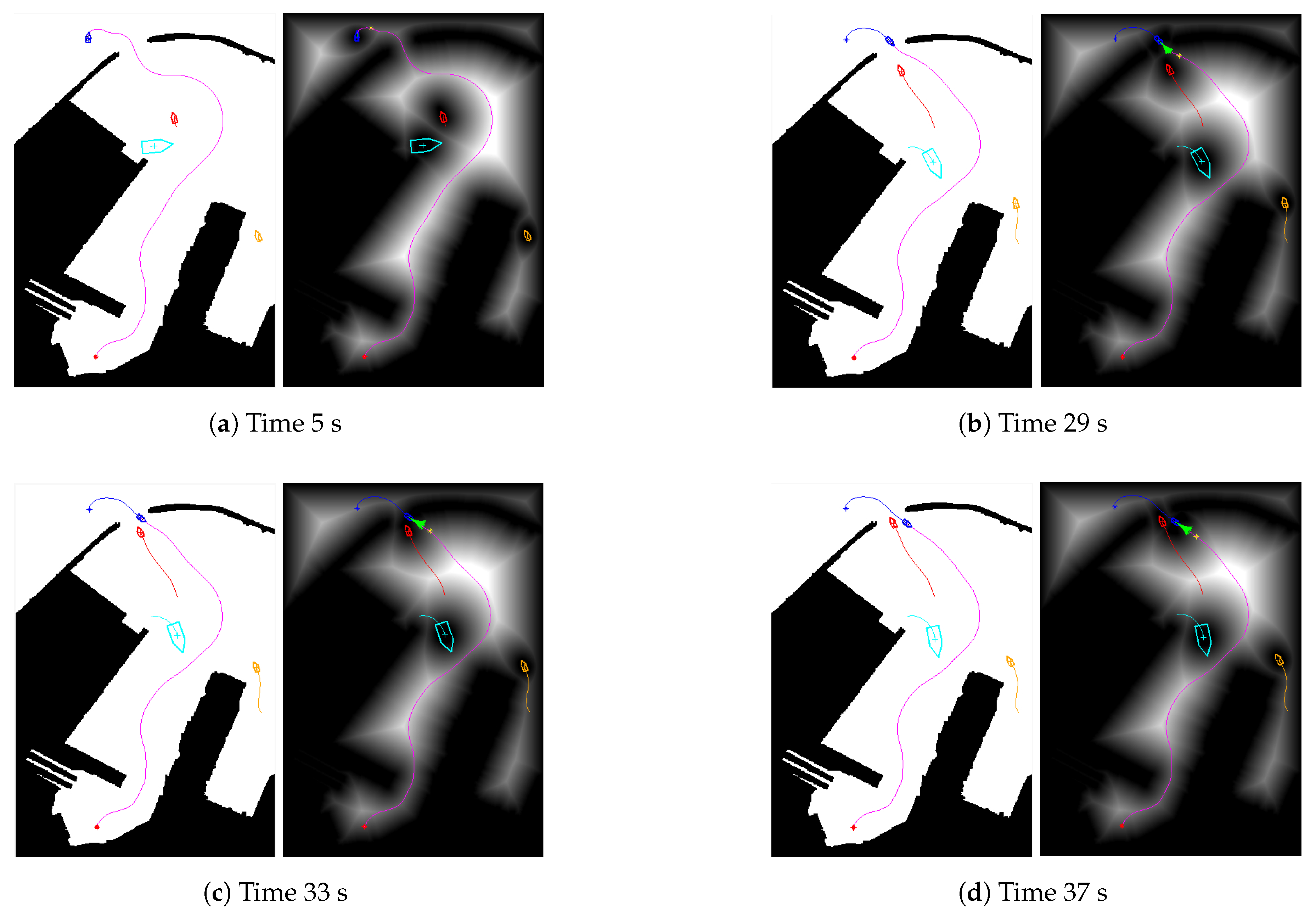
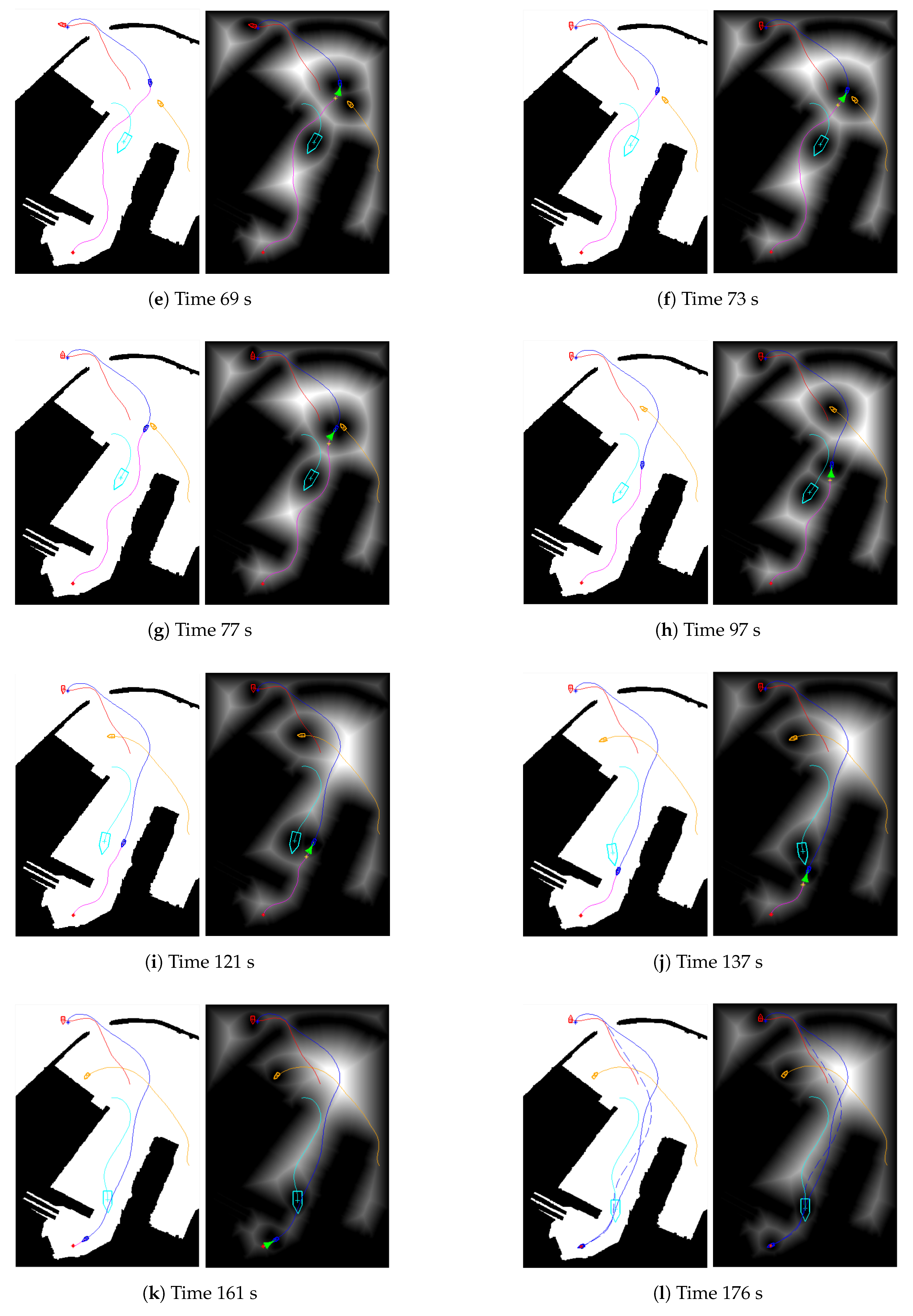
- The start and end points for the USV are marked as blue and red ‘∗’ markers. The end point can be enlarged to a red circular area, and if the USV enters the area, it can be considered to be finished. Moreover, the dynamic target is marked as yellow ‘∗’ marker.
- There are three curves of the USV in the diagram. The magenta curve is the planned path of the DTFMS method for the USV. The blue curve represents the track of the USV up to a final time. The green curves denote the predicted trajectories at the present time. The symbol of the USV is the blue boat form.
- To make the vessels easy to observe, the symbols of both the USV and the target vessels (TVs) are enlarged 15 times in terms of size.
- The curves and boat forms with red, orange, and cyan colors represent the tracks and symbols of TV1, TV2, and TV3, respectively.
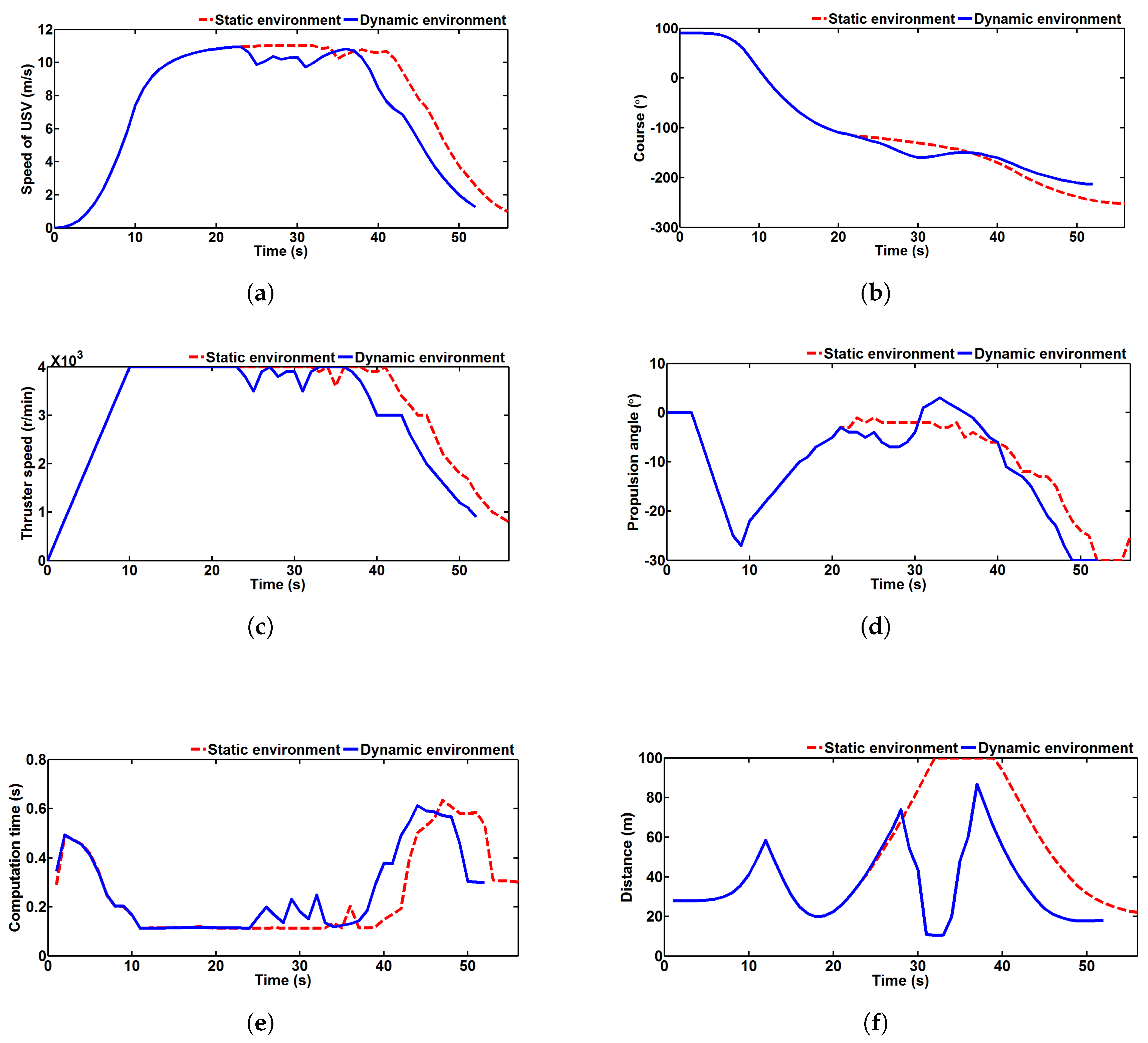
6.1. Verification in Simulation Environment with Single Moving Target Vessel
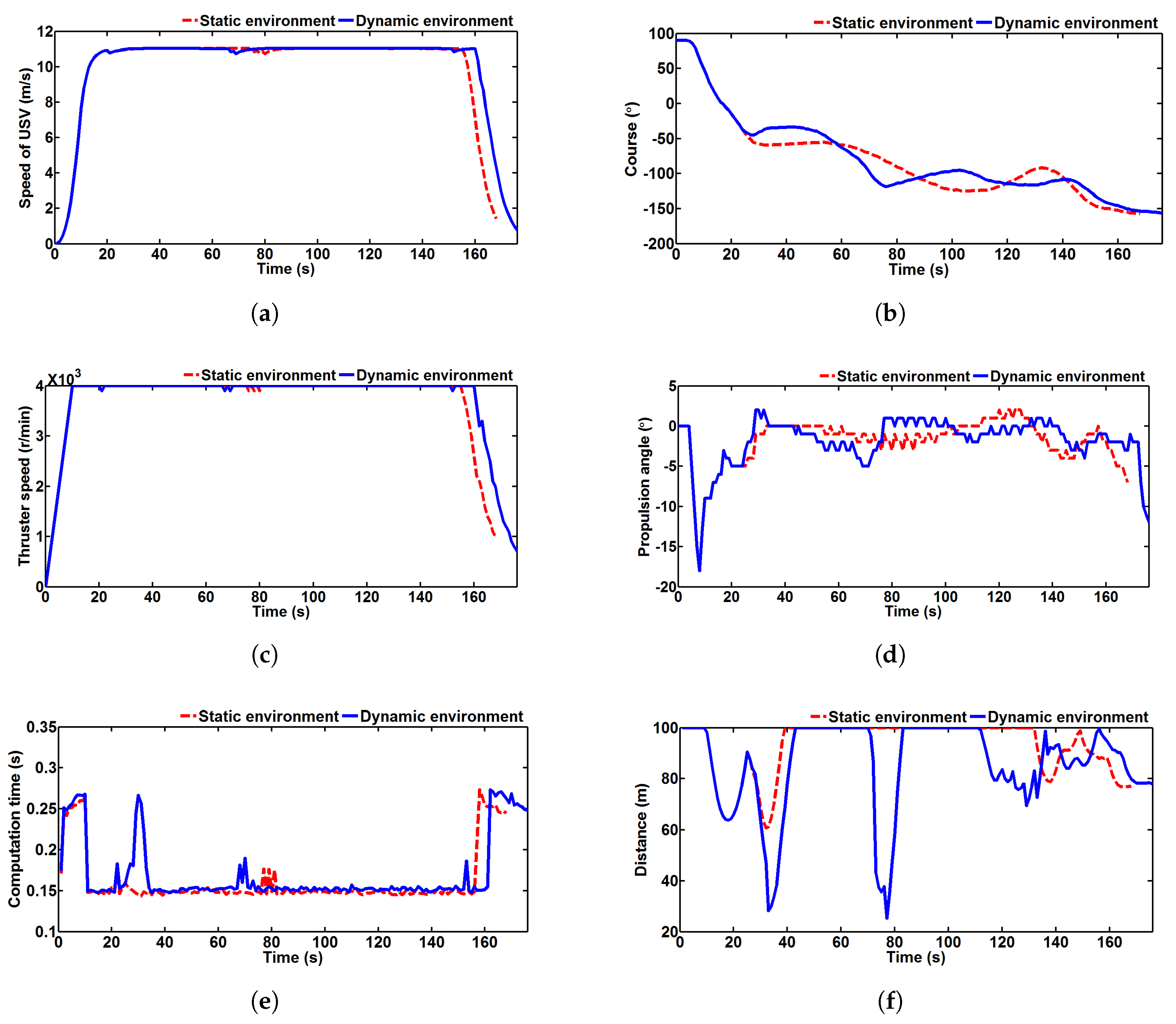
6.2. Verification in Realistic Sea Environment with Multiple Moving Target Vessels
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Ann. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Breivik, M. Topics in Guided Motion Control of Marine Vehicles. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2010. [Google Scholar]
- Bertram, V. Unmanned Surface Vehicles—A Survey; Skibsteknisk Selskab: Copenhagen, Denmark, 2008; pp. 1–4. [Google Scholar]
- Breivik, M.; Hovstein, V.E.; Fossen, T.I. Straight-Line Target Tracking for Unmanned Surface Vehicles. Model. Identif. Control 2008, 29, 131–149. [Google Scholar] [CrossRef]
- Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Ann. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef]
- Xie, S.R.; Wu, P.; Liu, H.L.; Yan, P.; Li, X.M.; Luo, J.; Li, Q.M. A novel method of unmanned surface vehicle autonomous cruise. Ind. Robot Int. J. 2016, 43, 121–130. [Google Scholar] [CrossRef]
- Yang, J.M.; Tseng, C.M.; Tseng, P.S. Path planning on satellite images for unmanned surface vehicles. Int. J. Naval Archit. Ocean Eng. 2015, 7, 87–99. [Google Scholar] [CrossRef]
- Campbell, S.; Abu-Tair, M.; Naeem, W. An automatic COLREGs-compliant obstacle avoidance system for an unmanned surface vehicle. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2014, 228, 108–121. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Shin, J.U.; Kim, H.; Myung, H. Angular rate-constrained path planning algorithm for unmanned surface vehicles. Ocean Eng. 2014, 84, 37–44. [Google Scholar] [CrossRef]
- Candeloro, M.; Lekkas, A.M.; Sorensen, A.J. A Voronoi-diagram-based dynamic path-planning system for underactuated marine vessels. Control Eng. Pract. 2017, 61, 41–54. [Google Scholar] [CrossRef]
- Wang, C.; Mao, Y.S.; Du, K.J.; Hu, B.Q.; Song, L.F. Simulation on Local Obstacle Avoidance Algorithm for Unmanned Surface Vehicle. Int. J. Simul. Model. 2016, 15, 460–472. [Google Scholar] [CrossRef]
- Wu, P.; Xie, S.; Liu, H.; Li, M.; Li, H.; Peng, Y.; Li, X.; Luo, J. Autonomous obstacle avoidance of an unmanned surface vehicle based on cooperative manoeuvring. Ind. Robot Int. J. 2017, 44, 64–74. [Google Scholar] [CrossRef]
- Lazarowska, A. Ship’s Trajectory Planning for Collision Avoidance at Sea Based on Ant Colony Optimisation. J. Navig. 2015, 68, 291–307. [Google Scholar] [CrossRef]
- Fan, Y.S.; Sun, X.J.; Wang, G.F.; Zhao, Y.S. On evolutionary genetic algorithm in path planning for a USV collision avoidance. ICIC Express Lett. 2016, 10, 1691–1696. [Google Scholar]
- Zhuang, J.Y.; Zhang, L.; Zhao, S.Q.; Cao, J.; Wang, B.; Sun, H.B. Radar-based collision avoidance for unmanned surface vehicles. China Ocean Eng. 2016, 30, 867–883. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe Maritime Autonomous Navigation With COLREGS, Using Velocity Obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Tang, P.; Zhang, R.; Liu, D.; Huang, L.; Liu, G.; Deng, T. Local reactive obstacle avoidance approach for high-speed unmanned surface vehicle. Ocean Eng. 2015, 106, 128–140. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, W.; Shi, P. A real-time collision avoidance learning system for Unmanned Surface Vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Zhang, G.; Deng, Y.; Zhang, W. Robust neural path-following control for underactuated ships with the DVS obstacles avoidance guidance. Ocean Eng. 2017, 143, 198–208. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R.; Zhang, X. The fast marching method based intelligent navigation of an unmanned surface vehicle. Ocean Eng. 2017, 142, 363–376. [Google Scholar] [CrossRef]
- Bertaska, I.R.; Shah, B.; von Ellenrieder, K.; Svec, P.; Klinger, W.; Sinisterra, A.J.; Dhanak, M.; Gupta, S.K. Experimental evaluation of automatically-generated behaviors for USV operations. Ocean Eng. 2015, 106, 496–514. [Google Scholar] [CrossRef]
- Woo, J.; Kim, N. Vision-based target motion analysis and collision avoidance of unmanned surface vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2016, 230, 566–578. [Google Scholar] [CrossRef]
- Zuhaib, K.M.; Khan, A.M.; Iqbal, J.; Ali, M.A.; Usman, M.; Ali, A.; Yaqub, S.; Lee, J.Y.; Han, C. Collision Avoidance from Multiple Passive Agents with Partially Predictable Behavior. Appl. Sci. 2017, 7, 903. [Google Scholar] [CrossRef]
- Zhang, R.; Li, K.; He, Z.; Wang, H.; You, F. Advanced Emergency Braking Control Based on a Nonlinear Model Predictive Algorithm for Intelligent Vehicles. Appl. Sci. 2017, 7, 504. [Google Scholar] [CrossRef]
- Chen, S.L.; Cheng, C.Y.; Hu, J.S.; Jiang, J.F.; Chang, T.K.; Wei, H.Y. Strategy and Evaluation of Vehicle Collision Avoidance Control via Hardware-in-the-Loop Platform. Appl. Sci. 2016, 6, 327. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H.L.; Su, Z.K. Real-time path planning of unmanned aerial vehicle for target tracking and obstacle avoidance in complex dynamic environment. Aerosp. Sci. Technol. 2015, 47, 269–279. [Google Scholar] [CrossRef]
- Richards, A.; How, J.P. Robust distributed model predictive control. Int. J. Control 2007, 80, 1517–1531. [Google Scholar] [CrossRef]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship Collision Avoidance and COLREGS Compliance Using Simulation-Based Control Behavior Selection With Predictive Hazard Assessment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3407–3422. [Google Scholar] [CrossRef]
- Xia, C.; Liu, T.; Shi, T.; Song, Z. A Simplified Finite-Control-Set Model-Predictive Control for Power Converters. IEEE Trans. Ind. Inform. 2014, 10, 991–1002. [Google Scholar]
- Mu, D.D.; Wang, G.F.; Fan, Y.S.; Zhao, Y.S. Modeling and Identification of Podded Propulsion Unmanned Surface Vehicle and Its Course Control Research. Math. Probl. Eng. 2017, 2, 1–13. [Google Scholar] [CrossRef]
- Wang, N.; Meng, X.Y.; Xu, Q.Y.; Wang, Z.W. A Unified Analytical Framework for Ship Domains. J. Navig. 2009, 62, 643–655. [Google Scholar] [CrossRef]
- Sethian, J.A. Level set Methods and Fast Marching Method; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Gomez, J.V.; Lumbier, A.; Garrido, S.; Moreno, L. Planning robot formations with fast marching square including uncertainty conditions. Robot. Auton. Syst. 2013, 61, 137–152. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1994. [Google Scholar]
- Dong, W.J.; Guo, Y. Global time-varying stabilization of underactuated surface vessel. IEEE Trans. Autom. Control 2005, 50, 859–864. [Google Scholar] [CrossRef]
- Jia, X.l.; Yang, Y.s. The Mathematical Model of Ship Motion Mechanism Modeling and Identification Modeling; Dalian Maritime University Press: Dalian, China, 1999. [Google Scholar]
- Mu, D.; Wang, G.; Fan, Y.; Sun, X.; Qiu, B. Adaptive LOS Path Following for a Podded Propulsion Unmanned Surface Vehicle with Uncertainty of Model and Actuator Saturation. Appl. Sci. 2017, 7, 1232. [Google Scholar] [CrossRef]
- Sun, X.J.; Shi, L.L.; Fan, Y.S.; Wang, G.F. Online Parameter Identiflcation of USV Motion Model. Navig. China 2016, 1, 39–43. [Google Scholar]
- Tam, C.K.; Bucknall, R. Collision risk assessment for ships. J. Mar. Sci. Technol. 2010, 15, 257–270. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units | |
|---|---|---|---|
| USV | Size of the USV (length, breadth) | (7.02, 2.60) | m |
| Initial course of the USV | 90.0 | ||
| Initial speed of the USV | 0.0 (0.0) | m/s (kn) | |
| Initial thruster speed | 0.0 | r/min | |
| Maximum thruster speed | 66.7 (4000) | r/s (r/min) | |
| Change rate of thruster speed | 6.7 | r/s | |
| Discrete thruster speed | 1.7 (100) | r/s (r/min) | |
| Initial propulsion angle | 0.0 | ||
| Maximum propulsion angle | 30.0 | ||
| Change rate of propulsion angle | 5.0 | /s | |
| Discrete propulsion angle | 1.0 | ||
| Algorithm | 0.9 | – | |
| Search range | 100.0 | m | |
| Prediction horizon | 8.0 | s | |
| Control update interval | 1.0 | s | |
| Weight of evaluation function | (1.50, 1.50, 0.01, 2.00) | – |
| Environment | Index | Speed of the USV (m/s) | Thruster Speed (r/min) | Propulsion Angle (°) | Computation Time (s) | Distance (m) |
|---|---|---|---|---|---|---|
| static | maximum | 11.0 | 4000 | 0.0 | 0.63 | 100.0 |
| minimum | 0.0 | 0 | −30.0 | 0.11 | 19.8 | |
| average | 7.5 | 3109 | −10.8 | 0.25 | 51.1 | |
| dynamic | maximum | 10.9 | 4000 | 3.0 | 0.61 | 86.8 |
| minimum | 0.0 | 0 | −30.0 | 0.11 | 10.4 | |
| average | 7.2 | 3059 | −10.5 | 0.26 | 35.9 |
| Environment | Index | Speed of the USV (m/s) | Thruster Speed (r/min) | Propulsion Angle (°) | Computation Time (s) | Distance (m) |
|---|---|---|---|---|---|---|
| static | maximum | 11.0 | 4000 | 2.0 | 0.27 | 100.0 |
| minimum | 0.0 | 0 | −18.0 | 0.14 | 60.8 | |
| average | 10.0 | 3731 | −1.9 | 0.16 | 92.8 | |
| dynamic | maximum | 11.0 | 4000 | 2.0 | 0.27 | 100.0 |
| minimum | 0.0 | 0 | −18.0 | 0.15 | 25.4 | |
| average | 9.9 | 3690 | −1.9 | 0.17 | 85.7 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. An Automatic Navigation System for Unmanned Surface Vehicles in Realistic Sea Environments. Appl. Sci. 2018, 8, 193. https://doi.org/10.3390/app8020193
Sun X, Wang G, Fan Y, Mu D, Qiu B. An Automatic Navigation System for Unmanned Surface Vehicles in Realistic Sea Environments. Applied Sciences. 2018; 8(2):193. https://doi.org/10.3390/app8020193
Chicago/Turabian StyleSun, Xiaojie, Guofeng Wang, Yunsheng Fan, Dongdong Mu, and Bingbing Qiu. 2018. "An Automatic Navigation System for Unmanned Surface Vehicles in Realistic Sea Environments" Applied Sciences 8, no. 2: 193. https://doi.org/10.3390/app8020193
APA StyleSun, X., Wang, G., Fan, Y., Mu, D., & Qiu, B. (2018). An Automatic Navigation System for Unmanned Surface Vehicles in Realistic Sea Environments. Applied Sciences, 8(2), 193. https://doi.org/10.3390/app8020193