A Review on Fault Current Limiting Devices to Enhance the Fault Ride-Through Capability of the Doubly-Fed Induction Generator Based Wind Turbine






Abstract
1. Introduction
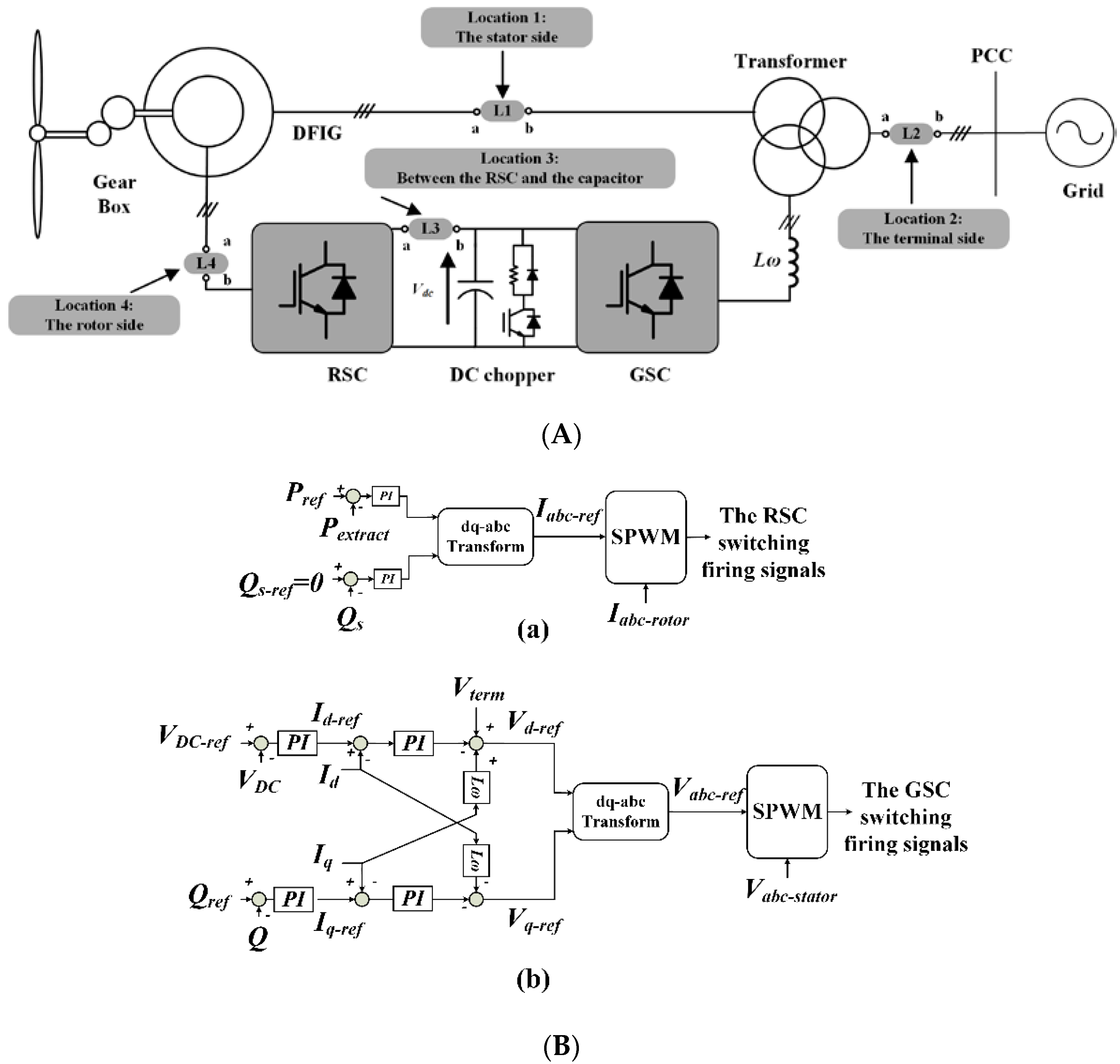
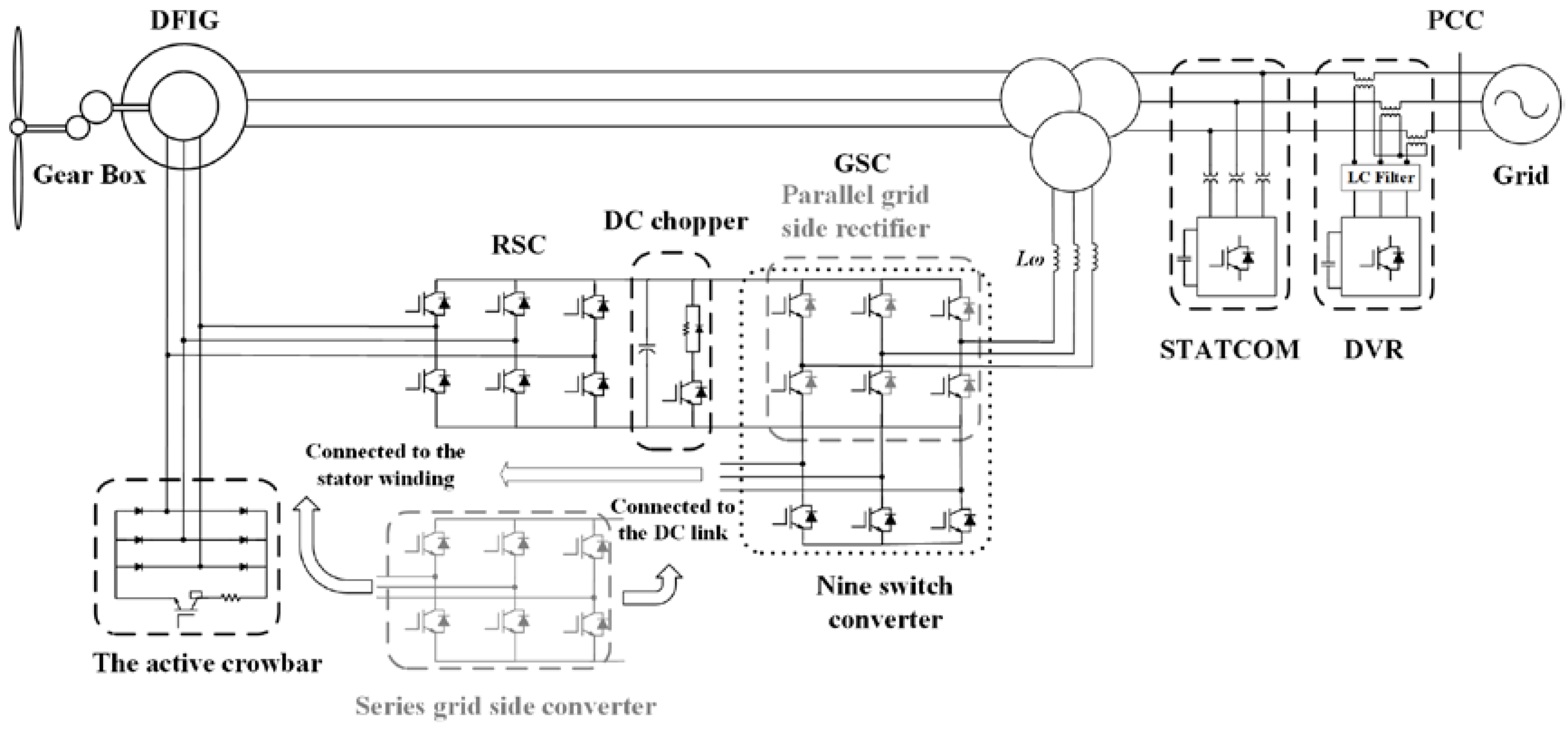
2. Doubly-Fed Induction Generator
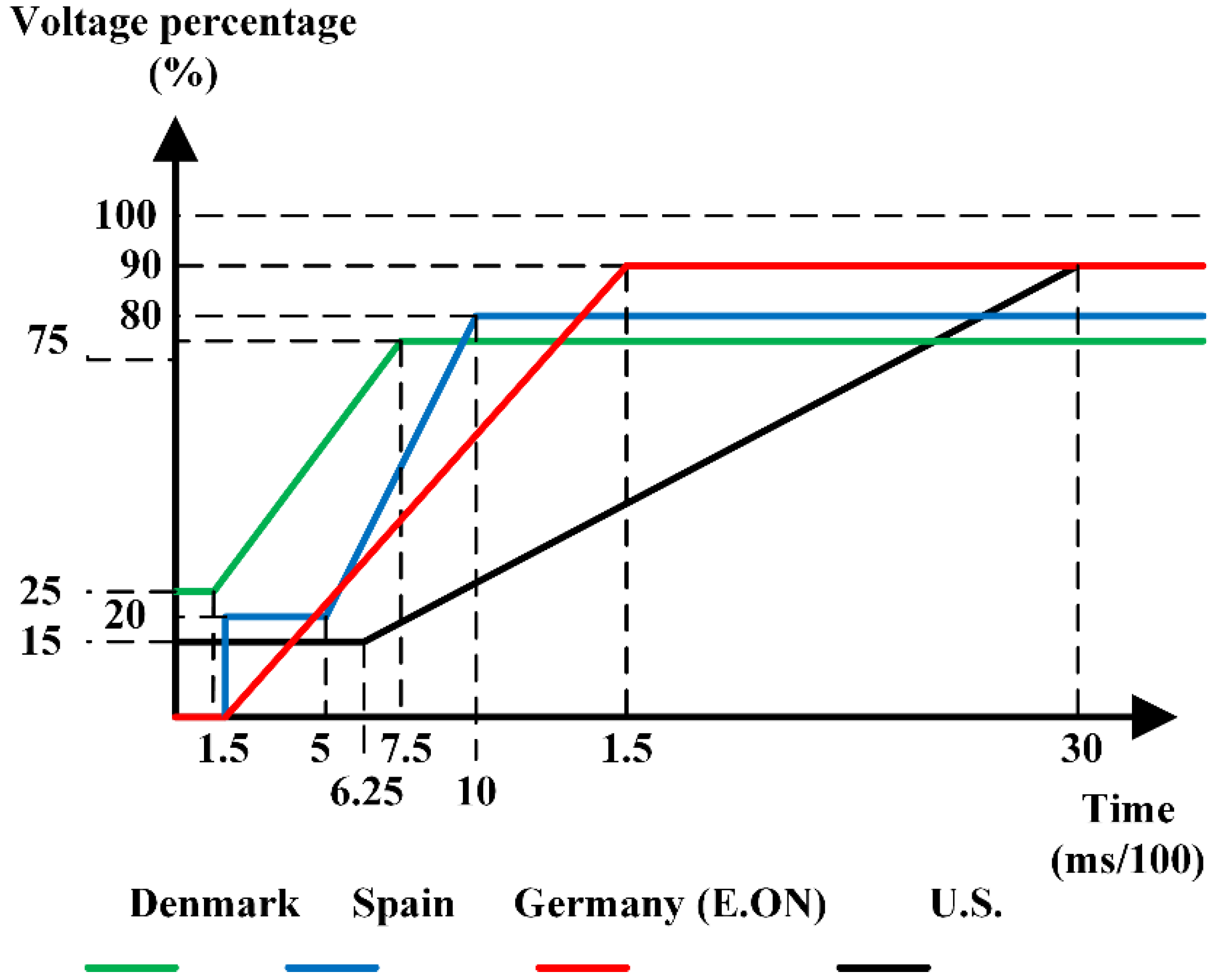
3. Fault Ride-Through
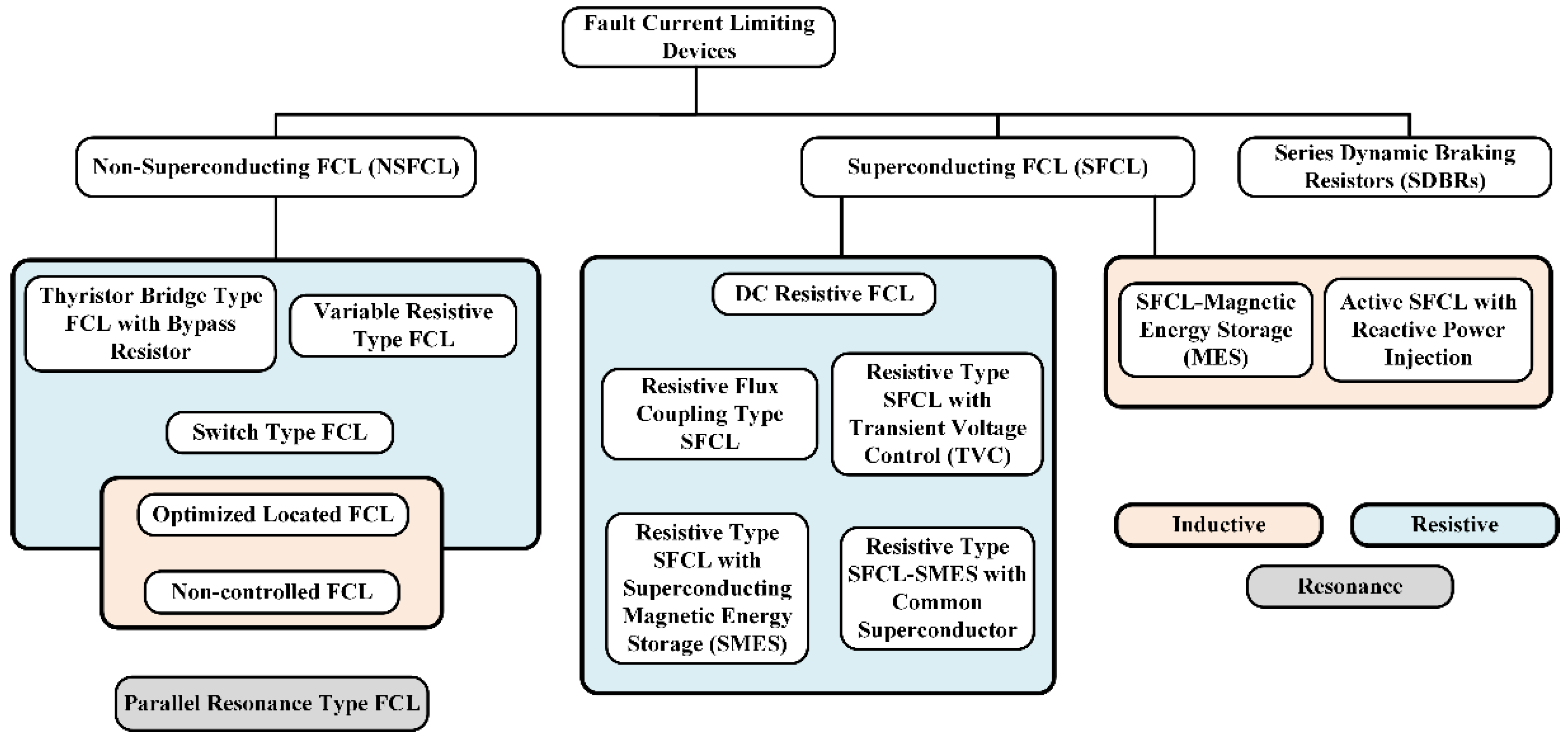
4. Fault Current Limiting Devices
4.1. Non-Superconducting FCL
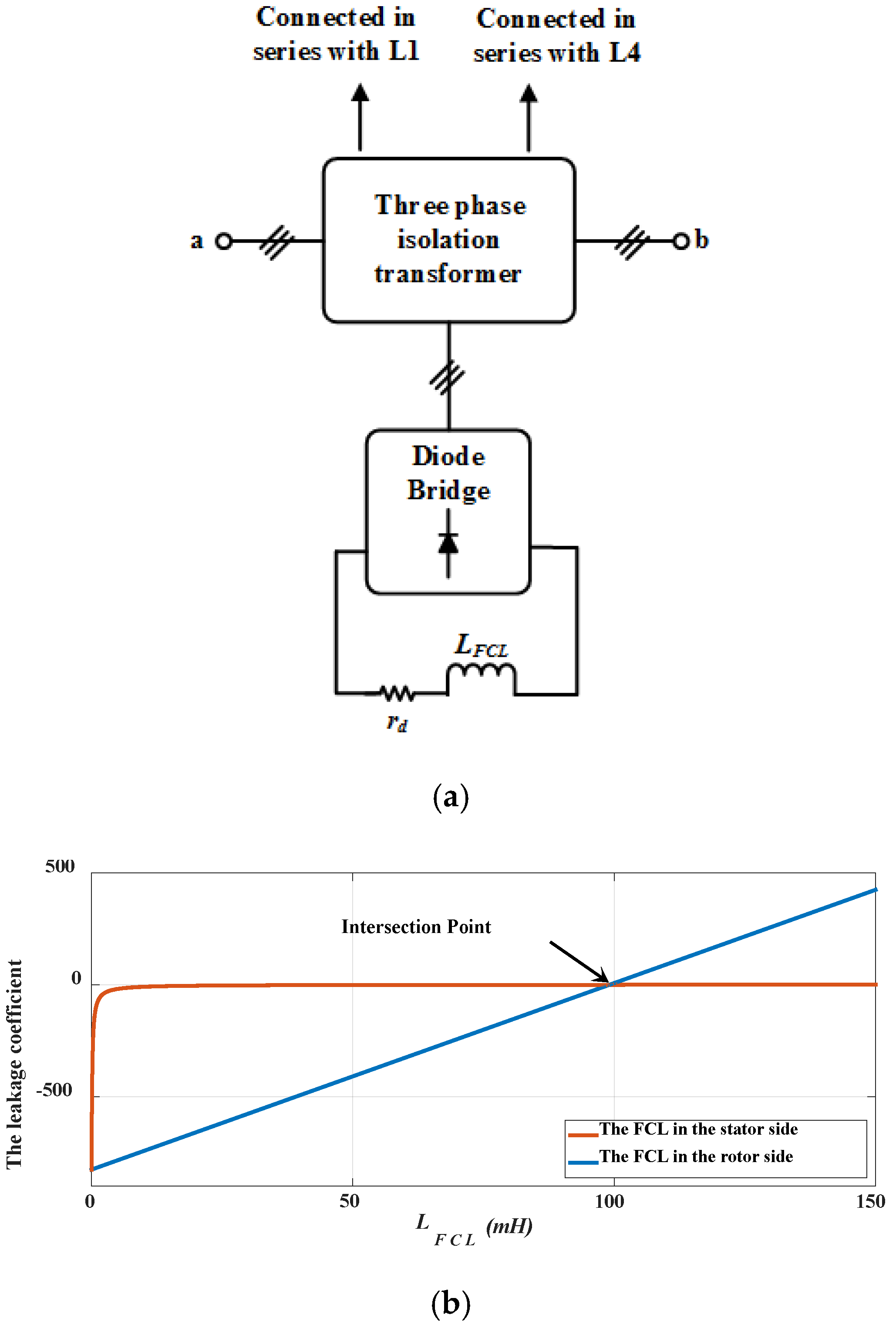
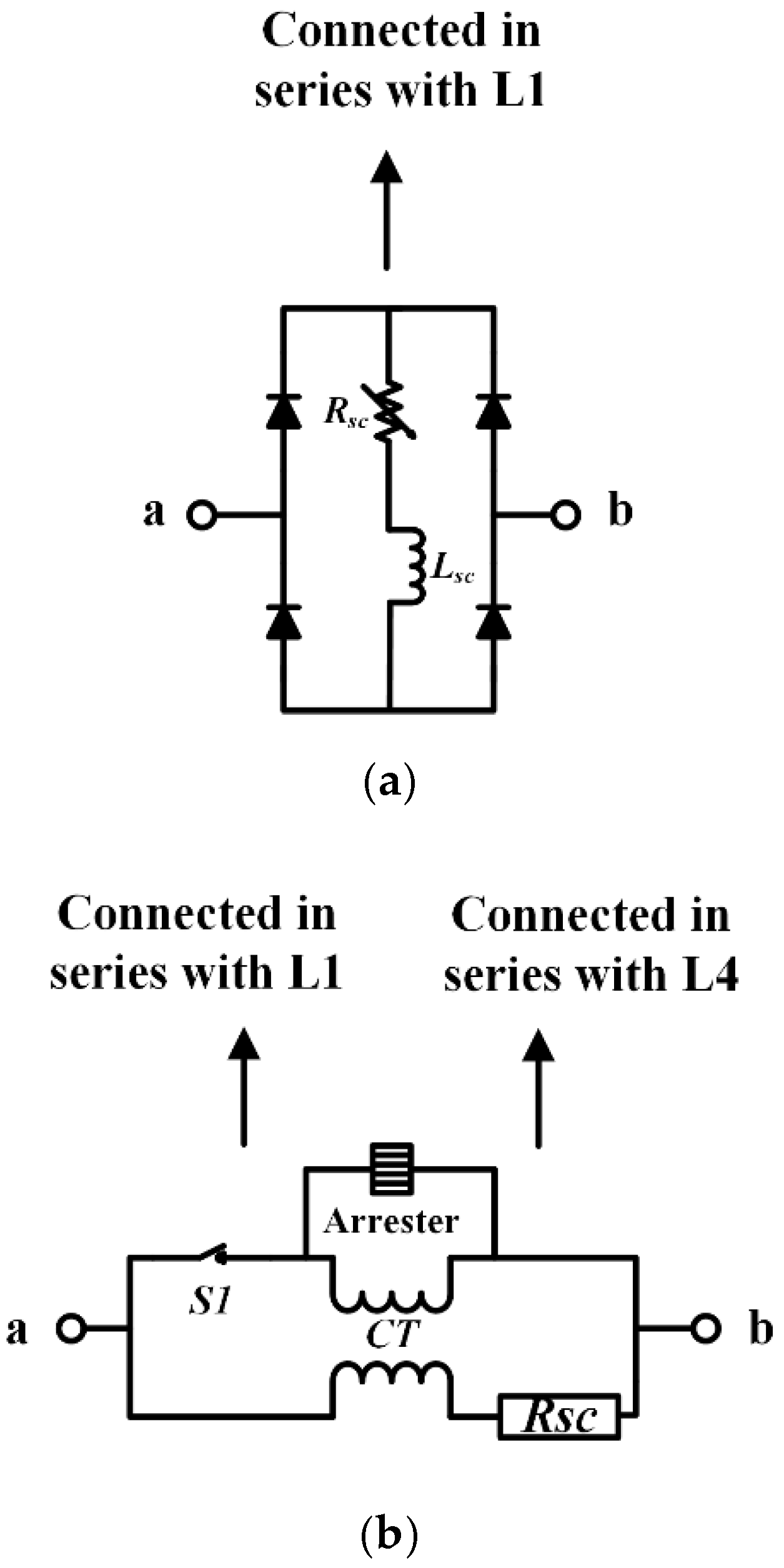
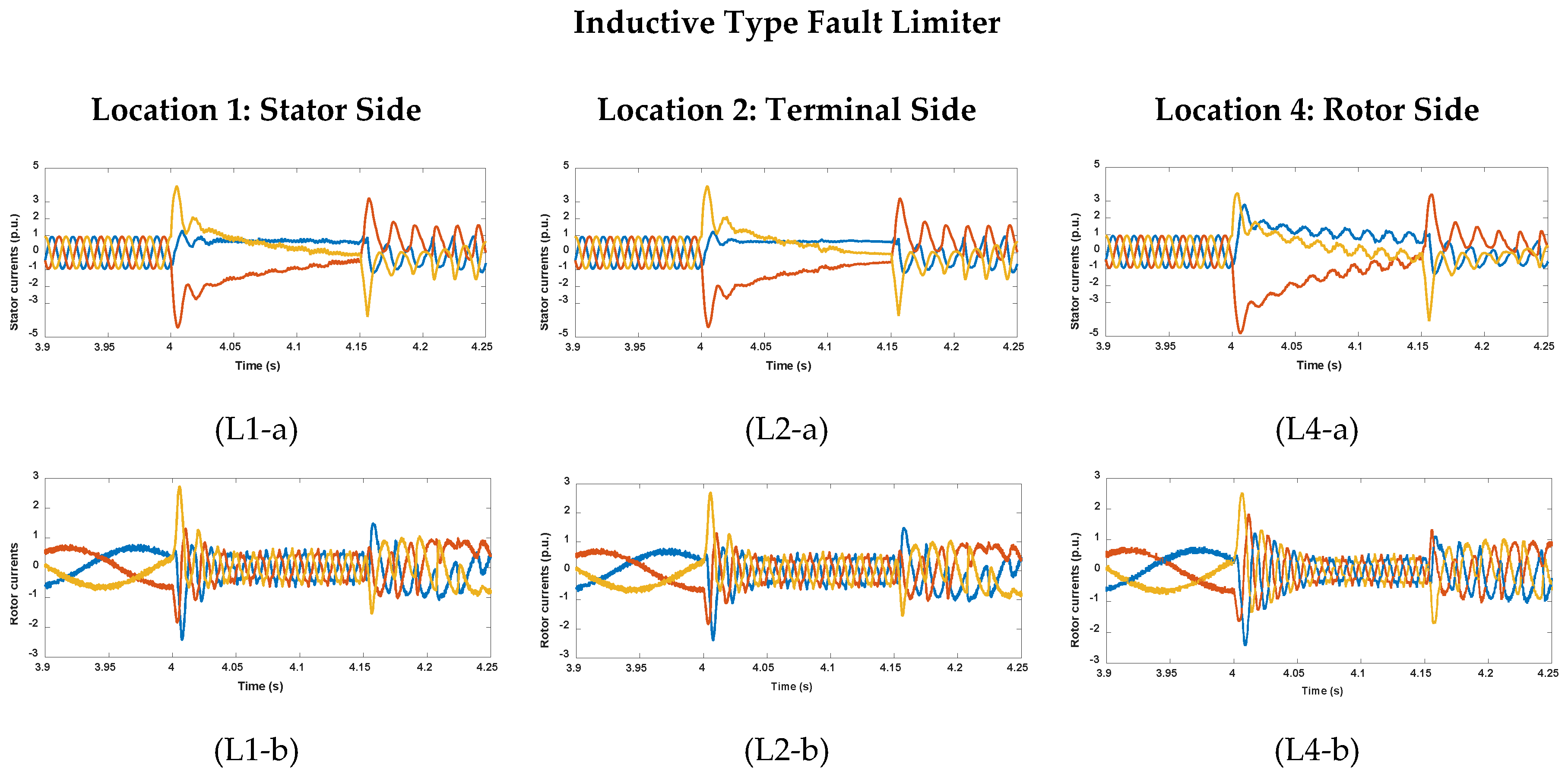
4.1.1. Inductive Type FCL: Non-Controlled FCL
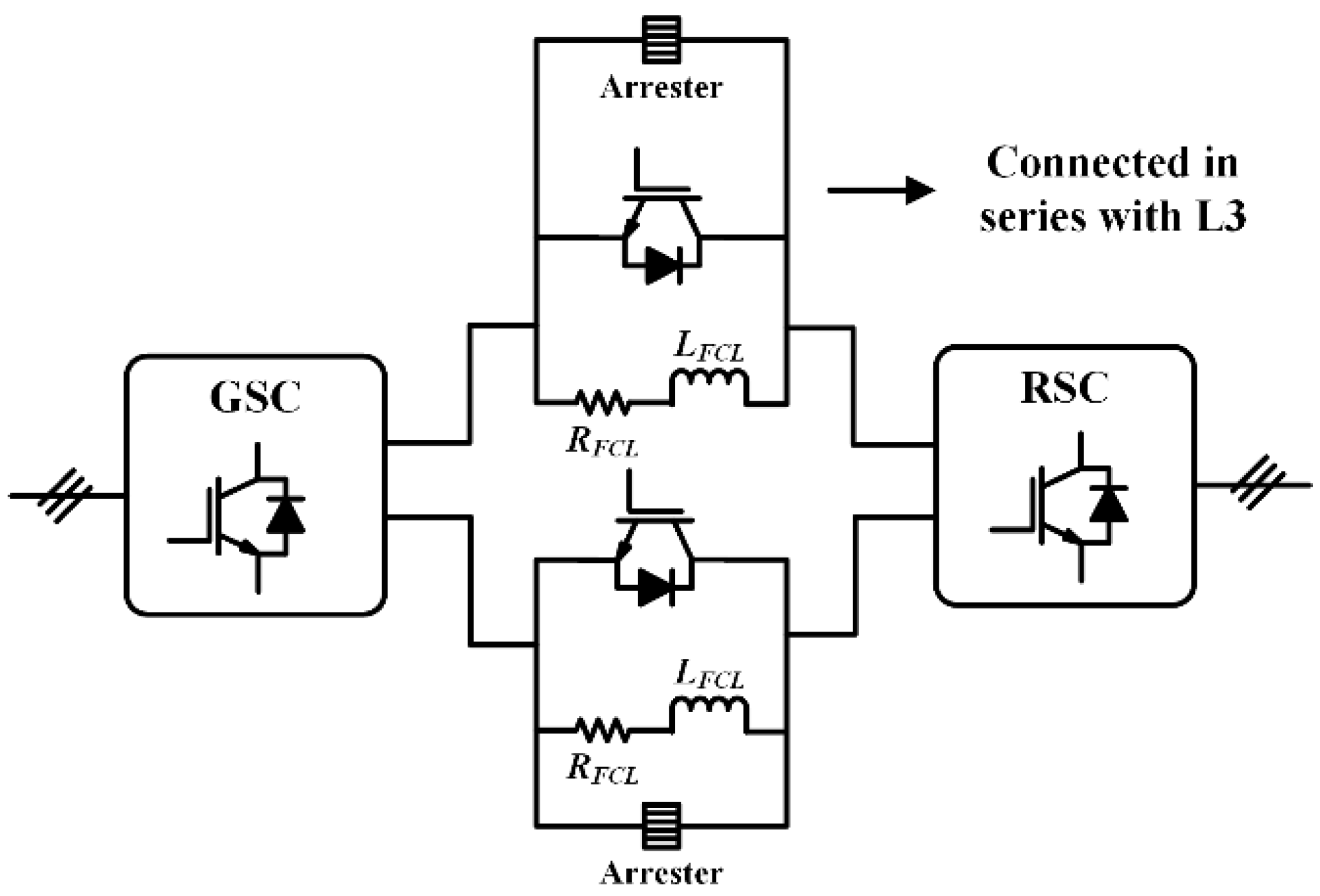
4.1.2. Inductive-Resistive Type FCL: Optimized Located FCL
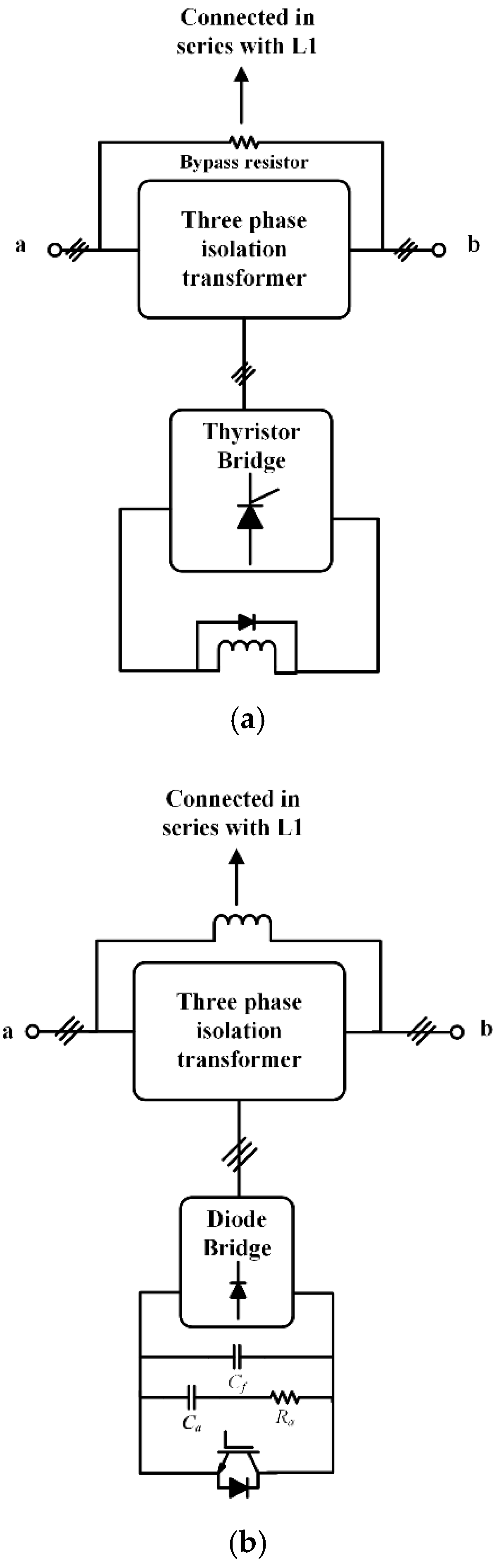
4.1.3. Resistive Type FCL: Thyristor Bridge Type FCL
4.1.4. Resistive Type FCL: Switch Type FCL (STFCL)
4.1.5. Resistive Type FCL: Variable Resistive Type FCL
4.1.6. Resonance Type FCL: Parallel Resonance Type FCL
4.2. Superconducting FCL
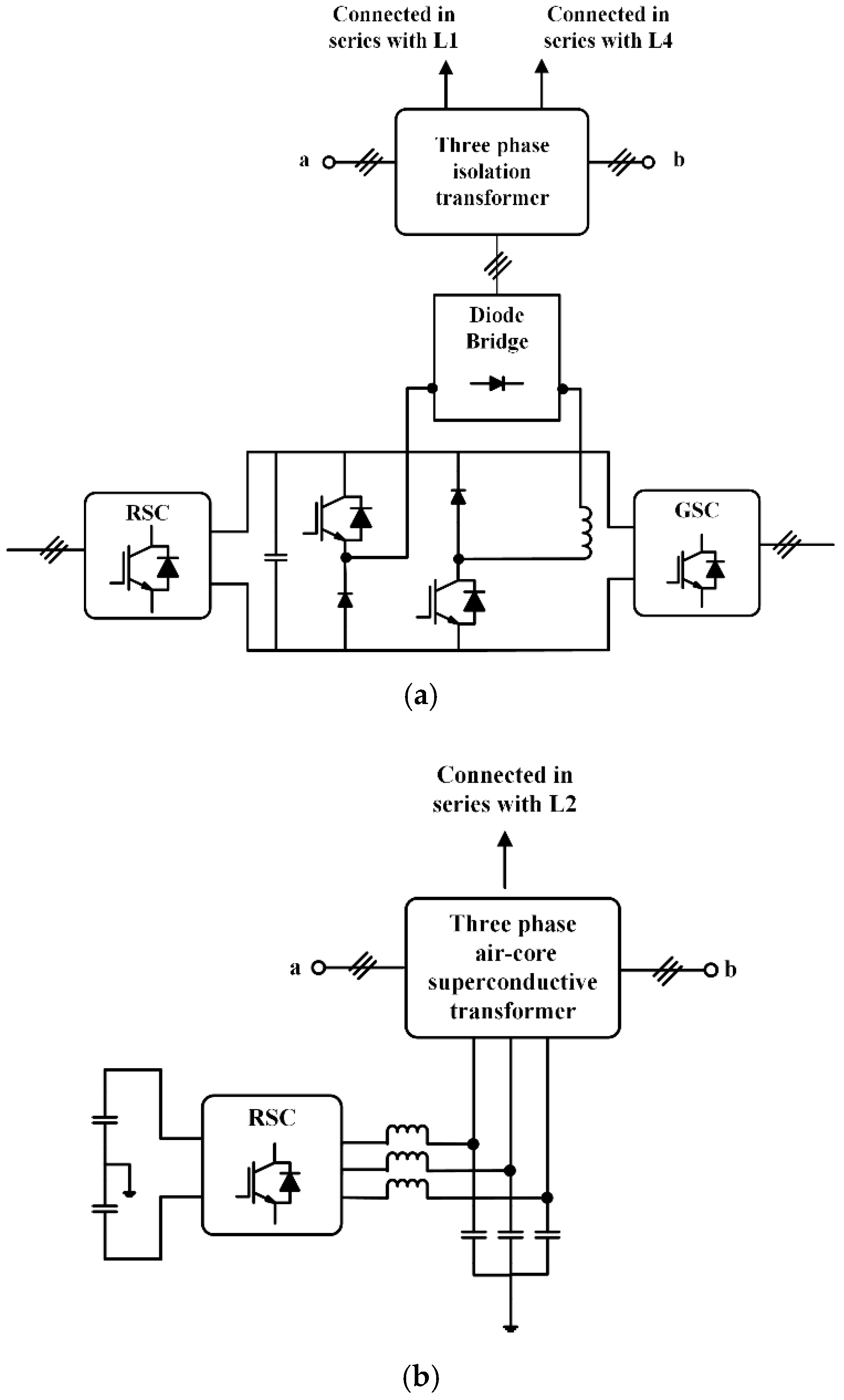
4.2.1. Inductive Type FCL: Superconducting Fault Current Limiter–Magnetic Energy Storage System (SFCL-MES)
4.2.2. Inductive Type FCL: Active SFCL with Reactive Power Injection
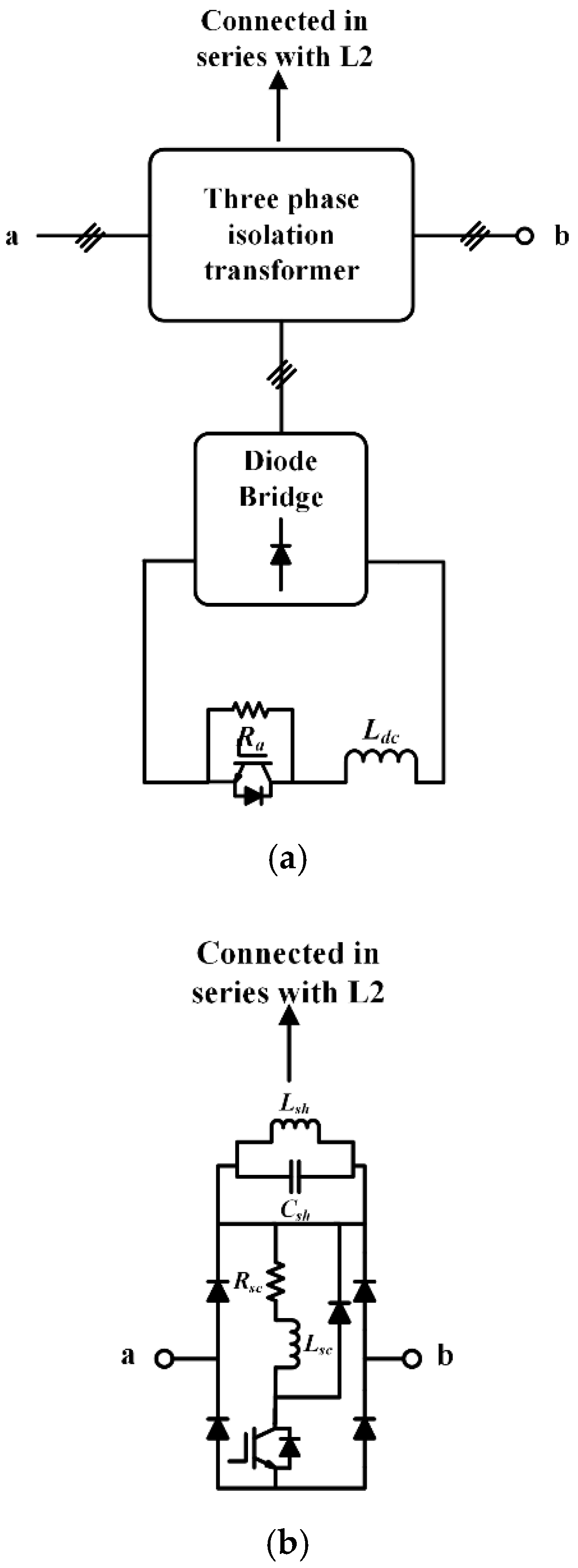
4.2.3. Resistive Type FCL: DC-Resistive SFCL
4.2.4. Resistive Type FCL: Resistive-Flux-Coupling Type SFCL
4.2.5. Resistive Type FCL: Resistive Type SFCL with Transient Voltage Control (TVC)
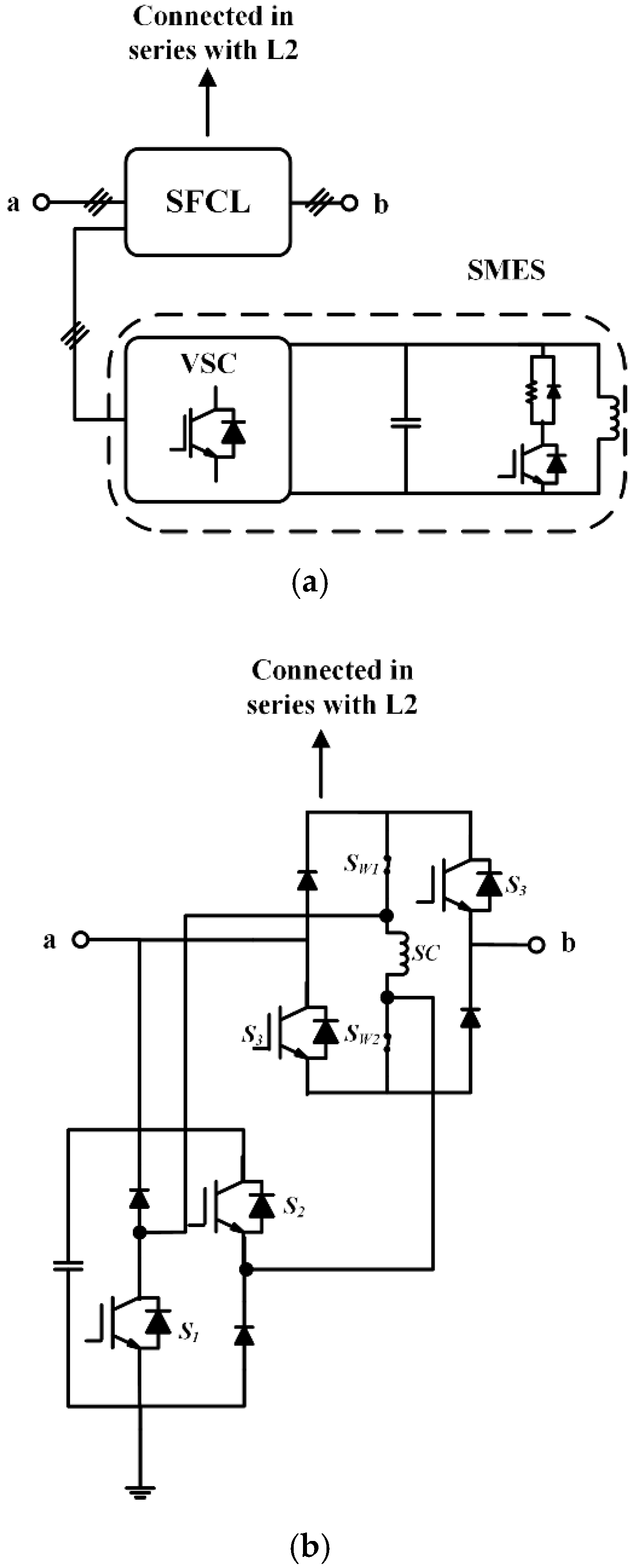
4.2.6. Resistive Type FCL: Superconducting Magnetic Energy Storage (SMES) with the SFCL
4.2.7. Resistive Type FCL: Resistive Type SFCL in the Rotor Side
4.3. Series Dynamic Braking Resistor
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FRT | Fault Ride-Through |
| DFIG | Doubly-Fed Induction Generator |
| RSC | Rotor Side Converter |
| PCC | Point of the Common Coupling |
| FCLs | Fault Current Limiters |
| SDBRs | Series Dynamic Braking Resistors |
| GSC | Grid Side Converter |
| EMF | Electromotive Force |
| SFCL-MES | Superconducting Fault Current Limiter–Magnetic Energy Storage System |
| TVC | Transient Voltage Control |
| SMES | Superconducting Magnetic Energy Storage |
| STATCOM | Static Synchronous Compensator |
| DVR | Dynamic Voltage Restorers |
| BTFCL-BR | Thyristor Bridge Type FCL with Bypass Resistor |
| NSC | Non-Superconductor |
| STFCL | Switch Type FCL |
| VR-FCL | Variable Resistive Type FCL |
| FLC | Fuzzy Logic Controller |
| SNC | Static Nonlinear Controller |
| ANFIS | Adaptive-Network-Based Fuzzy Inference System |
References
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renew. Power Gener. 2009, 3, 308–332. [Google Scholar] [CrossRef]
- Hansen, A.D.; Michalke, G. Fault ride-through capability of DFIG wind turbines. Renew. Energy 2007, 32, 1594–1610. [Google Scholar] [CrossRef]
- LÓpez, J.; GubÍa, E.; Sanchis, P.; Roboam, X.; Marroyo, L. Wind turbines based on doubly fed induction generator under asymmetrical voltage dips. IEEE Trans. Energy Convers. 2008, 23, 321–330. [Google Scholar] [CrossRef]
- Ma, K. Power Electronics For The Next Generation Wind Turbine System; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Netz, E. Grid Code; High and Extra High Voltage; E. ON Netz GmbH: Bayreuth, Germany, 2006; Available online: https://www.eon.com/en.html (accessed on 1 August 2018).
- Justo, J.J.; Mwasilu, F.; Jung, J.-W. Doubly-fed induction generator based wind turbines: A comprehensive review of fault ride-through strategies. Renew. Sustain. Energy Rev. 2015, 24, 447–467. [Google Scholar] [CrossRef]
- Duong, M.Q.; Sava, G.N.; Grimaccia, F.; Leva, S.; Mussetta, M.; Costinas, S.; Golovanov, N. Improved LVRT based on coordination control of active crowbar and reactive power for doubly fed induction generators. In Proceedings of the ATEE 2015 9th International Symposium on Advanced Topics in Electrical Engineering, Bucharest, Rome, 7–9 May 2015; pp. 650–655. [Google Scholar]
- Huchel, L.; Moursi, M.S.E.; Zeineldin, H.H. A parallel capacitor control strategy for enhanced frt capability of DFIG. IEEE Trans. Sustain. Energy 2015, 6, 303–312. [Google Scholar] [CrossRef]
- Pannell, G.; Zahawi, B.; Atkinson, D.J.; Missailidis, P. Evaluation of the performance of a dc-link brake chopper as a dfig low-voltage fault-ride-through device. IEEE Trans. Energy Convers. 2013, 28, 535–542. [Google Scholar] [CrossRef]
- Ambati, B.B.; Kanjiya, P.; Khadkikar, V. A low component count series voltage compensation scheme for dfig wts to enhance fault ride-through capability. IEEE Trans. Energy Convers. 2015, 30, 208–217. [Google Scholar] [CrossRef]
- Flannery, P.S.; Venkataramanan, G. Unbalanced voltage sag ride-through of a doubly fed induction generator wind turbine with series grid-side converter. IEEE Trans. Ind. Appl. 2009, 45, 1879–1887. [Google Scholar] [CrossRef]
- Fathabadi, H. Control of a DFIG-based wind energy conversion system operating under harmonically distorted unbalanced grid voltage along with nonsinusoidal rotor injection conditions. Energy Convers. Manag. 2014, 84, 60–72. [Google Scholar] [CrossRef]
- Lopez, J.; Sanchis, P.; Roboam, X.; Marroyo, L. Dynamic behavior of the doubly fed induction generator during three-phase voltage dips. IEEE Trans. Energy Convers. 2007, 22, 709–717. [Google Scholar] [CrossRef]
- Guo, W.Y.; Xiao, L.; Dai, S.T.; Li, Y.H.; Xu, X.; Zhou, W.W.; Li, L. LVRT capability enhancement of DFIG with switch-type fault current limiter. IEEE Trans. Ind. Electron. 2015, 62, 332–342. [Google Scholar] [CrossRef]
- Naderi, S.B.; Negnevitsky, M.; Jalilian, A.; Tarafdar Hagh, M.; Muttaqi, K.M. Low voltage ride-through enhancement of DFIG-based wind turbine using DC link switchable resistive type fault current limiter. Int. J. Electr. Power Energy Syst. 2017, 86, 104–119. [Google Scholar] [CrossRef]
- Xie, D.L.; Xu, Z.; Yang, L.H.; Østergaard, J.; Xue, Y.H.; Wong, K.P. A comprehensive LVRT control strategy for DFIG wind turbines with enhanced reactive power support. IEEE Trans. Power Syst. 2013, 28, 3302–3310. [Google Scholar] [CrossRef]
- Rahimi, M.; Parniani, M. Efficient control scheme of wind turbines with doubly fed induction generators for low-voltage ride-through capability enhancement. IET Renew. Power Gener. 2010, 4, 242–252. [Google Scholar] [CrossRef]
- Kanjiya, P.; Ambati, B.B.; Khadkikar, V. A novel fault-tolerant DFIG-based wind energy conversion system for seamless operation during grid faults. IEEE Trans. Power Syst. 2014, 29, 1296–1305. [Google Scholar] [CrossRef]
- Flannery, P.S.; Venkataramanan, G. A fault tolerant doubly fed induction generator wind turbine using a parallel grid side rectifier and series grid side converter. IEEE Trans. Power Electron. 2008, 23, 1126–1135. [Google Scholar] [CrossRef]
- Qiao, W.; Harley, R.G.; Venayagamoorthy, G.K. Coordinated reactive power control of a large wind farm and a STATCOM using heuristic dynamic programming. IEEE Trans. Energy Convers. 2009, 24, 493–503. [Google Scholar] [CrossRef]
- Qiao, W.; Harley, R.G.; Venayagamoorthy, G.K. Effects of FACTS devices on a power system which includes a large wind farm. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 Novermber 2006; pp. 2070–2076. [Google Scholar]
- Ibrahim, A.O.; Nguyen, T.H.; Lee, D.C.; Kim, S.C. A fault ride-through technique of DFIG wind turbine systems using dynamic voltage restorers. IEEE Trans. Energy Convers. 2011, 26, 871–882. [Google Scholar] [CrossRef]
- Hagh, M.T.; Naderi, S.B.; Jafari, M. Application of non-superconducting fault current limiter to improve transient stability. In Proceedings of the 2010 IEEE International Conference on Power and Energy, Kuala Lumpur, Malaysia, 29 Novermber–1 December 2010; pp. 646–650. [Google Scholar]
- Naderi, S.B.; Negnevitsky, M.; Jalilian, A.; Hagh, M.T.; Muttaqi, K.M. Optimum resistive type fault current limiter: An efficient solution to achieve maximum fault ride-through capability of fixed-speed wind turbines during symmetrical and asymmetrical grid faults. IEEE Trans. Ind. Appl. 2017, 53, 538–548. [Google Scholar] [CrossRef]
- Jafari, M.; Naderi, S.B.; Hagh, M.T.; Abapour, M.; Hosseini, S.H. Voltage sag compensation of point of common coupling (PCC) using fault current limiter. IEEE Trans. Power Deliv. 2011, 26, 2638–2646. [Google Scholar] [CrossRef]
- Naderi, S.B.; Negnevistky, M.; Jalilian, A.; Hagh, M.T. Non-controlled fault current limiter to improve fault ride through capability of DFIG-based wind turbine. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Mardani, M.; Fathi, S.H. Fault current limiting in a wind power plant equipped with a DFIG using the interface converter and an optimized located FCL. In Proceedings of the 6th Power Electronics, Drive Systems & Technologies Conference (PEDSTC2015), Tehran, Iran, 3–4 February 2015; pp. 328–333. [Google Scholar]
- Guo, W.; Xiao, L.; Dai, S.; Xu, X.; Li, Y.; Wang, Y. Evaluation of the performance of BTFCLS for enhancing lvrt capability of DFIG. IEEE Trans. Power Electron. 2015, 30, 3623–3637. [Google Scholar] [CrossRef]
- Hossain, M.K.; Ali, M.H. Transient stability augmentation of PV/DFIG/SG-based hybrid power system by nonlinear control-based variable resistive FCL. IEEE Trans. Sustain. Energy 2015, 6, 1638–1649. [Google Scholar] [CrossRef]
- Naderi, S.B.; Jafari, M.; Tarafdar Hagh, M. Controllable resistive type fault current limiter (CR-FCL) with frequency and pulse duty-cycle. Int. J. Electr. Power Energy Syst. 2014, 61, 11–19. [Google Scholar] [CrossRef]
- Rashid, G.; Ali, M.H. Application of parallel resonance fault current limiter for fault ride through capability augmentation of DFIG based wind farm. In Proceedings of the 2016 IEEE/PES Transmission and Distribution Conference and Exposition (T & D), Dallas, TX, USA, 2–5 May 2016; pp. 1–5. [Google Scholar]
- Naderi, S.B.; Jafari, M.; Hagh, M.T. Parallel-resonance-type fault current limiter. IEEE Trans. Ind. Electron. 2013, 60, 2538–2546. [Google Scholar] [CrossRef]
- Guo, W.; Xiao, L.; Dai, S. Enhancing low-voltage ride-through capability and smoothing output power of DFIG with a superconducting fault-current limiter magnetic energy storage system. IEEE Trans. Energy Convers. 2012, 27, 277–295. [Google Scholar] [CrossRef]
- Guo, W.; Xiao, L.; Dai, S. Fault current limiter-battery energy storage system for the doubly-fed induction generator: Analysis and experimental verification. IET Gener. Trans. Distrib. 2016, 10, 653–660. [Google Scholar] [CrossRef]
- Chen, L.; Zheng, F.; Deng, C.; Li, Z.; Guo, F. Fault ride-through capability improvement of DFIG-based wind turbine by employing a voltage-compensation-type active SFCL. Can. J. Elect. Comput. Eng. 2015, 38, 132–142. [Google Scholar] [CrossRef]
- Hossain, M.M.; Ali, M.H. Transient stability improvement of doubly fed induction generator based variable speed wind generator using DC resistive fault current limiter. IET Renew. Power Gener. 2016, 10, 150–157. [Google Scholar] [CrossRef]
- Hossain, M.; Ali, H. Asymmetric fault ride through capability enhancement of DFIG based variable speed wind generator by DC resistive fault current limiter. In Proceedings of the 2016 IEEE/PES Transmission and Distribution Conference and Exposition (T & D), Dallas, TX, USA, 2–5 May 2016. [Google Scholar]
- Chen, L.; Deng, C.; Zheng, F.; Li, S.; Liu, Y.; Liao, Y. Fault ride-through capability enhancement of DFIG-based wind turbine with a flux-coupling-type SFCL employed at different locations. IEEE Trans. Appl. Supercond. 2015, 25, 15. [Google Scholar] [CrossRef]
- Ou, R.; Xiao, X.Y.; Zou, Z.C.; Zhang, Y.; Wang, Y.H. Cooperative control of SFCL and reactive power for improving the transient voltage stability of grid-connected wind farm with DFIGs. IEEE Trans. Appl. Supercond. 2016, 26, 1–6. [Google Scholar] [CrossRef]
- Ngamroo, I.; Karaipoom, T. Cooperative control of SFCL and SMES for enhancing fault ride through capability and smoothing power fluctuation of dfig wind farm. IEEE Trans. Appl. Supercond. 2014, 24, 1–4. [Google Scholar] [CrossRef]
- Ngamroo, I.; Karaipoom, T. Improving low-voltage ride-through performance and alleviating power fluctuation of DFIG wind turbine in dc microgrid by optimal smes with fault current limiting function. IEEE Trans. Appl. Supercond. 2014, 24, 1–5. [Google Scholar] [CrossRef]
- Zou, Z.C.; Chen, X.Y.; Li, C.S.; Xiao, X.Y.; Zhang, Y. Conceptual design and evaluation of a resistive-type SFCL for efficient fault ride through in a DFIG. IEEE Trans. Appl. Supercond. 2016, 26, 1–9. [Google Scholar] [CrossRef]
- Zou, Z.C.; Xiao, X.Y.; Liu, Y.F.; Zhang, Y.; Wang, Y.H. Integrated protection of DFIG-based wind turbine with a resistive-type SFCL under symmetrical and asymmetrical faults. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Mohammadi, J.; Afsharnia, S.; Vaez-Zadeh, S.; Farhangi, S. Improved fault ride through strategy for doubly fed induction generator based wind turbines under both symmetrical and asymmetrical grid faults. IET Renew. Power Gener. 2016, 10, 1114–1122. [Google Scholar] [CrossRef]
- Yang, J.; Fletcher, J.E.; O’Reilly, J. A series-dynamic-resistor-based converter protection scheme for doubly-fed induction generator during various fault conditions. IEEE Trans. Energy Conver. 2010, 25, 422–432. [Google Scholar] [CrossRef]
- Okedu, K.E. Enhancing DFIG wind turbine during three-phase fault using parallel interleaved converters and dynamic resistor. IEEE Trans. Energy Conver. 2016, 10, 1211–1219. [Google Scholar] [CrossRef]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Wind farms fault ride through using DFIG with new protection scheme. IEEE Trans. Sustain. Energy 2012, 3, 242–254. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FCL Type | Location | Impedance Type | Rotor Transient Over-Current Limitation | Stator Fault Current Limitation | Excess Active Power Evacuation | Terminal Voltage Sag Compensation | Rotor Switching State during the Fault | Operation on Different Types of Fault | Components | SC. | Cost |
|---|---|---|---|---|---|---|---|---|---|---|---|
| SFCL-MES | L1 and L4 | Inductive | L1: Yes (G.) L4: Yes (E.) | L1: Yes (E.) L4: Yes (G.) | No | L1: Yes (G.) L4: No | Continuous with different control, good controllability of the RSC in L1 | Not effective in asymmetrical faults | I-T*1 Diodes*6(CSC)*8(VSC) Inductor*1 S-S*0(CSC)*2(VSC) | Yes | High |
| Switch Type FCL | L1 | Inductive | Yes (G.) | Yes (E.) | No | Yes (G.) | Continuous with good RSC controllability | Not effective in asymmetrical faults | I-T*1 Diode*6 Inductor*1 S-S*1 A snubber circuit | No | Low |
| Active SFCL with Reactive Power Injection | L2 | Inductive | Yes (G.) | Yes (E.) | No | Yes (G.) | Continuous with good RSC controllability | Effective for all fault types | I-T*1(superconductive) A low pass filter S-S*6 A split DC-link capacitors | Yes | High |
| DC Resistive FCL | L2 | Resistive | Yes (G.) | Yes (E.) | Yes | Yes (G.) | Continuous with good RSC controllability | Effective for all fault types | Diodes*12 SC*3 | Yes | High |
| Resistive Flux Coupling Type SFCL | L1 and L4 | Resistive | L1: Yes (E.) L4: Yes (G.) | L1: Yes (E.) L4: Yes (G.) | Yes | L1: Yes (G.) L4: No | Continuous with different control, good controllability of the RSC in L1 | Effective for all fault types | Coupling Transformer*3 SC*3 S-S*3 Arrestor*3 | Yes | High |
| Resistive Type SFCL with SMES | L2 | Resistive | Yes (G.) | Yes (E.) | Yes | Yes (E.) | Continuous with good RSC controllability | Effective for all fault types | Parallel Transformer*1 S-S*7 SC.*4 Diode*1 Capacitor*1 | Yes | High |
| Resistive Type SFCL with Transient Voltage Control | L2 | Resistive | Yes (G.) | Yes (E.) | Yes | Yes (E.) | Continuous with TVC, good controllability of the RSC | Effective for all fault types | SC.*3 | Yes | High |
| Resistive Type SFCL, SMES with Common SC | L2 | Resistive | Yes (G.) | Yes (E.) | Yes | Yes (E.) | Continuous with good RSC controllability | Effective for all fault types | S-S*18 SC.*3 Diode*12 Capacitor*3 | Yes | High |
| Thyristor Bridge Type FCL with Bypass Resistor | L1 | Resistive | Yes (G.) | Yes (E.) | Yes | Yes (E.) | Continuous with good RSC controllability | Not effective in asymmetrical faults | I-T*1 Diode*1 Thyristor*6 Bypass resistor*3 Inductance*1 | No | Low |
| Variable Resistive Type FCL | L2 | Variable resistance | Yes (G.) | Yes (E.) | Yes, controlled active power absorption | Yes (E.) | Continuous | Not effective in asymmetrical faults | I-T*1 Diode*6 Inductor*1 S-S*1 Resistance*1 | No | Low |
| Optimized Located FCL | L3 | Resistive-inductive | Yes (E.) | Yes (G.) | Yes, the rotor active power | No | Blocked | Effective for all fault types | S-S*2 Resistance*2 Inductance*2 Arrestor*2 | No | Low |
| Non-controlled FCL | L1 and L4 | Inductive | L1: Yes (G.) L4: Yes (E.) | L1: Yes (E.) L4: Yes (G.) | No | L1: Yes (G.) L4: No | Continuous | Effective for all fault types | I-T*1 Diode*6 Inductor*1 | No | Low |
| Parallel Resonance Type FCL | L2 | Resonance | Yes (G.) | Yes (E.) | Yes | Yes (E.) | Continuous | Effective for all fault types | S-S*3 Diode*15 Inductance*6 Capacitance*3 | No | Low |
| SDBR | L1 and L4 | Resistive | L1: Yes (G.) L4: Yes (E.) | L1: Yes (E.) L4: Yes (G.) | Yes | L1: Yes (G.) L4: No | Blocked | Effective for all fault types | Resistance*3 Thyristor*6 | No | Low |
| The DFIG and Transformer | |
| Rated power | 2 MW |
| Three-phase transformer | 0.69/34.5 kV, 60Hz, 5MVA |
| Rated stator voltage | 690 V |
| Rated frequency | 60 Hz |
| Stator leakage inductance | 0.12 p.u. |
| Rotor leakage inductance | 0.12 p.u. |
| Magnetising inductance | 3.45 p.u. |
| Stator to rotor turns ratio | 0.35 |
| Stator resistance | 0.011 p.u. |
| Stator inductance | 0.012 p.u. |
| Nominal wind speed | 13 m/s |
| The DC Chopper | |
| Rated DC-link voltage | 1200 V |
| DC chopper resistor | 0.5 Ω |
| DC bus capacitor | 50 mF |
| DC-link activation threshold voltage | 1.1 p.u. |
| Transmission Lines | |
| Length | 30 km |
| Line impedance | 0.01 + j0.1 Ω/km |
| Resistance of grid side filter | 0.3 p.u. |
| Reactance of grid side filter | 0.003 p.u. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naderi, S.B.; Davari, P.; Zhou, D.; Negnevitsky, M.; Blaabjerg, F. A Review on Fault Current Limiting Devices to Enhance the Fault Ride-Through Capability of the Doubly-Fed Induction Generator Based Wind Turbine. Appl. Sci. 2018, 8, 2059. https://doi.org/10.3390/app8112059
Naderi SB, Davari P, Zhou D, Negnevitsky M, Blaabjerg F. A Review on Fault Current Limiting Devices to Enhance the Fault Ride-Through Capability of the Doubly-Fed Induction Generator Based Wind Turbine. Applied Sciences. 2018; 8(11):2059. https://doi.org/10.3390/app8112059
Chicago/Turabian StyleNaderi, Seyed Behzad, Pooya Davari, Dao Zhou, Michael Negnevitsky, and Frede Blaabjerg. 2018. "A Review on Fault Current Limiting Devices to Enhance the Fault Ride-Through Capability of the Doubly-Fed Induction Generator Based Wind Turbine" Applied Sciences 8, no. 11: 2059. https://doi.org/10.3390/app8112059
APA StyleNaderi, S. B., Davari, P., Zhou, D., Negnevitsky, M., & Blaabjerg, F. (2018). A Review on Fault Current Limiting Devices to Enhance the Fault Ride-Through Capability of the Doubly-Fed Induction Generator Based Wind Turbine. Applied Sciences, 8(11), 2059. https://doi.org/10.3390/app8112059