Abstract
Vehicular networks make use of the Roadside Units (RSUs) to enhance the communication capabilities of the vehicles in order to forward control messages and/or to provide Internet access to vehicles, drivers and passengers. Unfortunately, within vehicular networks, the wireless signal propagation is mostly affected by buildings and other obstacles (e.g., urban fixtures), in particular when considering the IEEE 802.11p standard. Therefore, a crowded RSU deployment may be required to ensure vehicular communications within urban environments. Furthermore, some applications, notably those applications related to safety, require a fast and reliable warning data transmission to the emergency services and traffic authorities. However, communication is not always possible in vehicular environments due to the lack of connectivity even employing multiple hops. To overcome the signal propagation problem and delayed warning notification time issues, an effective, smart, cost-effective and all-purpose RSU deployment policy should be put into place. In this paper, we propose the genetic algorithm for roadside unit deployment (GARSUD) system, which uses a genetic algorithm that is capable of automatically providing an RSU deployment suitable for any given road map layout. Our simulation results show that GARSUD is able to reduce the warning notification time (the time required to inform emergency authorities in traffic danger situations) and to improve vehicular communication capabilities within different density scenarios and complexity layouts.
1. Introduction
Vehicular networks provide connectivity among vehicles and also among vehicles and traffic management authorities. In spite of the wide variety of applications for Intelligent Transport Systems (ITS) that are under the umbrella of vehicular networks, traffic safety applications have been undoubtedly one of the most researched in the last few years, particularly due to the benefits that they clearly offer to drivers and passengers [1,2].
Regarding traffic safety applications within the vehicular networks context, message propagation is the utmost important task since it assists vehicles involved in an accident to inform nearby vehicles and emergency services about the emergency situation. However, these communications are affected by obstacles, in particular when using the licensed ITS band at 5.9 GHz, as well as by the high mobility of vehicles, which constantly changes the network topology.
Vehicular networks include Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communications. In fact, the use of infrastructure improves the communication capabilities, which are very important concerning safety applications, where the warning messages should reach the authorities, as well as the surrounding vehicles that can be affected by accidents, other vehicles’ malfunction, among other issues.
Roadside Units (RSUs) are infrastructure communication nodes within vehicular networks. RSUs play an important role in vehicular communications due to their capabilities of: (i) delivering important information to vehicles, (ii) forwarding received messages to final recipients or (iii) providing Internet access to vehicles. To sum up, RSUs are deployed to extend vehicle coverage and to improve network performance in vehicular networks [3].
Vehicles’ communication capabilities highly depend on the number of RSUs deployed and their coverage. However, RSUs are usually costly to install and to maintain; thus, there is a trade-off between full coverage (in terms of connectivity) through RSUs and their deployment cost. Consequently, authorities tend to limit the number of RSUs, especially in suburbs and less populated areas, making RSUs a scarce resource in vehicular environments. We consider that it is important to optimally deploy a limited number of RSUs in the most pertinent locations (i.e., those places that clearly allow RSUs to extend coverage and to improve the overall network performance). In fact, it is necessary to find an automatized method to obtain the best locations for the RSU to be deployed in any scenario, due to the great variation of urban street layouts.
In this work, we propose a genetic algorithm for roadside unit deployment (GARSUD) in vehicular ad hoc networks (VANETs), and compare it against other deployment policies. We compare it against both geographic-based (i.e., the uniform mesh deployment Policy) [4] and the Density-based Road Side Unit deployment policy (D-RSU) [4] approaches. Our goal is three-fold: (i) to automate the deployment decision relying in our genetic-based algorithm, (ii) to minimize the deployment cost by only allocating the required number of RSUs to provide the necessary coverage, as well as (iii) to improve the communication capabilities of the vehicles in the scenario, in terms of reduced warning notification time, which is the time required to send warning messages to the emergency authorities.
This paper is organized as follows: In Section 2, we present works that propose some approaches closely related to the topic presented in this paper. Section 3 details GARSUD, our approach, which is capable of determining the best location for every RSU, increasing the coverage provided while reducing the notification time of warning messages in any given scenario. Section 4 presents the simulation parameters that we considered to assess our proposal. In Section 5, we discuss the simulation results obtained. Finally, in Section 6, we present the conclusions drawn from the analysis made throughout this paper.
2. Related Work
The application of evolutionary algorithms for optimizing practical issues has been widely extended in different fields, such as the real estate and investment sectors. For example, Król et al. [5] compared two different approaches based on evolutionary algorithms to assist with real estate appraisals. The experiments were conducted using training and testing sets prepared on the basis of 150 actual sale transactions made in a residential section of a Polish city. Dzeng et al. [6] applied simulation and a polyploidy genetic algorithm to help in the development of resort projects, which require a continuous and larger investment of resources compared to conventional real estate projects. The proposal allows investors to achieve increased profits, as well as maintaining the cash flow at a secure level. Regarding the energy and environmental sector, Morano et al. [7] performed an econometric analysis through an Evolutionary Polynomial Regression (EPR) technique that combines the effectiveness of genetic programming with the advantage of classical numerical regression. In particular, they studied the functional relationships between the aerodynamic parameters and the economic variables considered for a rapid evaluation of the convenience of an investment in roof-top wind turbine plants.
As for the RSU deployment policies, several works have been proposed so far, including different approaches to determine the number of RSUs required to provide a functional RSU deployment in terms of connectivity within a given scenario [8]. This sort of approach is focused on reducing the number of RSUs required [9,10], improving the overall network performance [11,12,13] or guarantying the Quality-of-Service (QoS) in vehicular networks when delivering data [14].
Other works also consider additional issues such as reducing the energy consumption of RSUs [3,15,16], improving vehicles’ content downloading capabilities [9], selecting the most suitable configurations for RSUs deployed [17] or estimating the maximum deployment distance between two neighboring RSUs [18]. Moreover, those works rely on different techniques such as clustering [3], cumulative weight [8], time continuous homogeneous Markov chains [9], game theoretic tools [19] and Integer Linear Programming (ILP) [15].
The works presented in [12,20] used an evolutionary-based approach to solve the RSU deployment problem. In particular, Cavalcante et al. [12] modeled the problem as a Maximum Coverage with Time Threshold Problem (MCTTP) and used a genetic algorithm to solve it. The algorithm was tested on four real-world datasets (i.e., Zurich and Winterthur downtowns and the rural areas of Baden and Baar) and compared to a greedy approach. However, the authors did not provide details about how they modeled communications between vehicles and RSUs. Regarding the proposal of Massobrio et al. [20], they used a multiobjective evolutionary algorithm that accounts for the number of vehicles and their speed for locating roadside infrastructure. This approach is oriented to maximize the coverage, in terms of the time that vehicles are connected to the RSUs, and minimizes the deployment cost. Unlike our proposal, the authors did not study the effect on warning message delivery, and although they used real mobility traces, they only simulated a one-lane road of 1 km with one RSU and 10 moving cars at 40 km/h. Therefore, their results cannot be extrapolated to more complex roadmap layouts.
To the best of our knowledge, the majority of proposals are focused on very specific scenarios (i.e., roadmap layouts and vehicle densities) and consider too simplified assumptions. In general, existing approaches are able to obtain good results under a single vehicle density or in simple layouts. However, using GARSUD, we can determine suitable deployments for a wide range of densities and roadmap topologies.
Although base station and hotspot infrastructure deployment policies have been widely studied and applied by operators [21], due to the nature of the wireless technologies and their capabilities (e.g., GSM/UMTS/3G/4G and IEEE802.11a,b,g,p), plus the diverse mobility involved (e.g., hotspots for human speed vs. RSUs for vehicular speed), such well-known cellular techniques cannot be applied and/or extrapolated to the RSU domain. Therefore, in this work, we did not consider mobile base station placement models and/or policies.
3. GARSUD: Automatic RSU Deployment
The RSU deployment methods commonly based on fixed placement, using geometrical rules, have severe limitations such as areas with no coverage or unbalanced network load (i.e., some RSUs exhibit extremely high network usage, while others do not). To surpass such limitations, we propose a genetic algorithm for roadside unit deployment (GARSUD), which is based on the evolutionary computing branch of artificial intelligence [22].
Genetic algorithms (GAs), named after the biological evolution process and its genetic-molecular basis, conduct a population of individuals to evolve by subjecting such a population to random processes similar to those present in biological evolution—i.e., mutations and genetic re-combinations—as well as a selection according to criteria to determine which individuals are more adapted to survive. The most fit individuals are selected and advanced to subsequent generations, and those less fit individuals are discharged [23].
Genetic algorithms require establishing a relation between a set of solutions to a problem, called phenotype, and a set of individuals in a natural population. This is achieved by encoding the information of each solution in a string, usually binary, called chromosome or genotype. The symbols that compose such a string are the genes. The populations of possible solutions encoded as genotypes evolve through iterations called generations, thereby obtaining for each genotype the corresponding phenotypes, which are evaluated by using a measure of fitness. To generate the subsequent generation, the following set of genetic operators must be used: parent selection, crossover, mutation and replacement.
3.1. Representation of Individuals
Every potential solution to the problem requires being codified into a genotype before applying the genetic operators. Potential solutions of the RSU deployment problem would include the location of all of the available RSUs, which becomes the phenotype. An appropriate genotype would have a clear correspondence with a specific phenotype. Since genes must be selected from a finite alphabet, the number of possible locations for the RSUs is limited, and they can be configured. GARSUD assigns a unique number to every possible location for the RSUs, and the genotype of each solution contains a sequence of numbers representing the location selected for each RSU, as depicted in Figure 1. A reform strategy is applied to avoid assigning more than one RSU to each possible location, improving the performance of the algorithm.
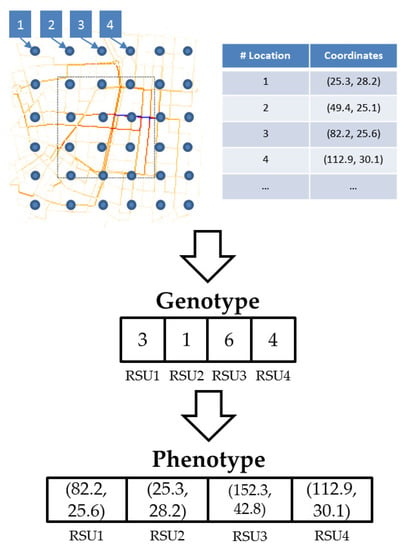
Figure 1.
Representation of individuals in the genetic algorithm for roadside unit (RSU) deployment (GARSUD). Each possible location for RSUs appear as blue circles on the map layout.
3.2. Parent Selection
This phase selects the fittest individuals of the current population to transmit their genetic information to the next generation. GARSUD uses a tournament selection [24] process, in which k random individuals in the population are compared, and the one with the highest fitness value becomes a potential parent of new individuals.
3.3. Crossover or Re-Combination
The crossover, also known as re-combination, operator merges two parents to generate a third new individual. GARSUD uses the default re-combination operator in genetic algorithms, i.e., the one-point crossover [25] depicted in Figure 2.
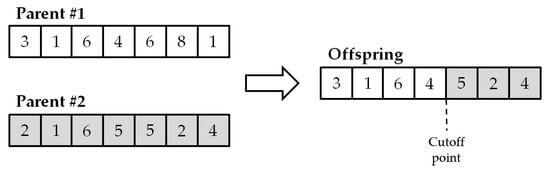
Figure 2.
One-point crossover operator example.
3.4. Mutation
The mutation operator introduces diversity into the population, thereby avoiding local minima solutions [23]. GARSUD makes use of probabilistic mutation for each gene, meaning that a gene may vary its value using a constant probability. The mutation probability is adapted to the size of the genotype to make one change in each individual on average.
3.5. Replacement
The replacement, also called selection of survivors or environmental selection, is implemented by means of generational replacement, where the individuals from the last generation are completely replaced by the new offspring. GARSUD reassures that the best values remain alive in future generations. In particular, it uses a steady-state scheme [26] where only a fraction of the individuals is replaced (those with the lowest fitness values) to ensure that the best values obtained so far survive in future generations. In our approach, the fraction of individuals replaced in each generation is set to 50%.
3.6. Fitness Function
The target function to be maximized, also known as the fitness function, summarizes in a single numerical figure how close to meeting the overall specification requirements the given designed solution is. It is one of the most important parameters to determine since it acts as a guide for the search process. In this paper, the RSU deployment problem tackled focuses on low notification time for warning messages to the emergency authorities. In particular, our RSU deployment approach should reduce warning notification delays close to zero by achieving a fitness function close to one hundred.
Since the RSU deployment is fixed, the fitness function should reflect the results obtained for the different traffic flows that could be found during a single day in a given city. The approach we followed calculates the average warning notification time for each scenario tested, in order to assign a uniform importance to every possible vehicle density. The fitness function that guides GARSUD is indicated in (1), where represents the average warning notification time measured in scenario i and N is the number of tested scenarios.
Notice that the GARSUD fitness function returns values between zero and 100, where zero represents the worst possible result when the warning notification time is maximum and 100 when the warning notification time is low.
We assign the same importance (i.e., the same weight) to each scenario since this approach provides in practice good results, and it ensures that no scenario is completely ignored or considered irrelevant. Nevertheless, the calculated mean value could be tuned to assign different weights to each density (i.e., representing how often that scenario would be found in a real environment).
GARSUD uses of evolutionary computation, specifically genetic algorithms, to test different configurations and guide the search process to maximize the value of the objective function. Testing all the possible configurations is computationally unfeasible, due to the high amount of possible combinations of locations for the RSUs, even when considering small map layouts. For example, deploying only five RSUs in a map with 200 possible locations for each RSU could produce 2.53565e + 9 different possible deployments. Considering, for example, that our computational power allows us to evaluate 1000 deployments per second (which requires a high computing performance), it would require more than 29 days of computing time to determine the optimal deployment for only one small specific scenario.
GARSUD requires a map of the target area including the street and junction layout, the possible obstacles interfering with the wireless radio signal, mobility traces representing the behavior of the traffic using realistic vehicle densities and the number of RSUs to be deployed in the area. Using this information as input, GARSUD computes a location for every RSU, thus increasing the coverage provided and reducing the notification time of warning messages in the given scenario.
Figure 3 illustrates the steps followed by GARSUD. As a first step, it makes an initial random RSU deployment; secondly, it simulates this specific scenario by using a modified version of the ns-2 simulator, which allows us to calculate the solution fitness. After that, it performs the parent selection, the crossover and the mutation operations. Finally, it evaluates the fitness of the new solution, makes the partial replacement and checks whether the termination condition is fulfilled (in our case, a maximum number of completed generations). If not, it performs the parent selection process again and repeats the subsequent operations.
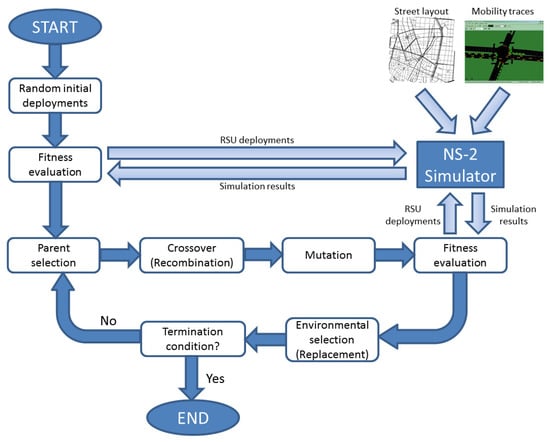
Figure 3.
GARSUD algorithm.
Efficient use of genetic algorithms requires defining several parameters to guide the search process. Table 1 summarizes the parameters defined in GARSUD.

Table 1.
Parameters used in our genetic algorithm approach.
4. Simulation Environment
We present the simulation environment that we have setup to assess the feasibility and performance of our proposal. We have used simulation, as an alternative to a real implementation, since deploying and testing crowded vehicular networks is not feasible due to several factors such as the scalability of the number of vehicles involved and the respective costs.
Regarding the map layout to simulate, we selected two real map layouts—the city of Madrid and the city of Valencia, located in Spain—as the target locations to simulate the RSU deployments. They are quite different since Madrid presents a regular scenario with large streets where the wireless signal can be easily propagated (see Figure 4a), while Valencia represents a more complex layout (see Figure 5a). Therefore, we test our proposed approach GARSUD within highly diverse scenarios.
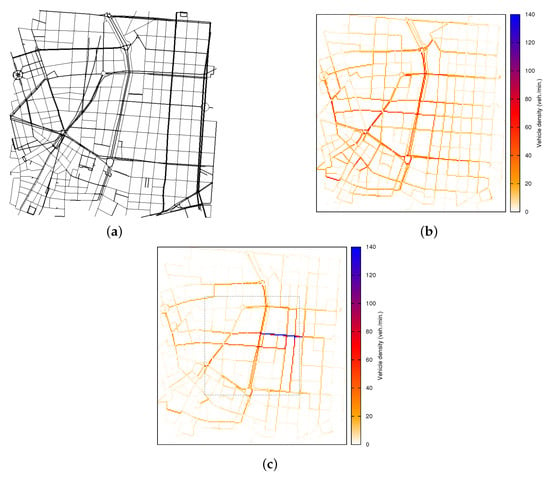
Figure 4.
Scenario 1: City of Madrid, Spain. (a) Street map layout; (b) Krauss model: vehicular density for each street; (c) downtown model: vehicular density for each street in the downtown (square box).
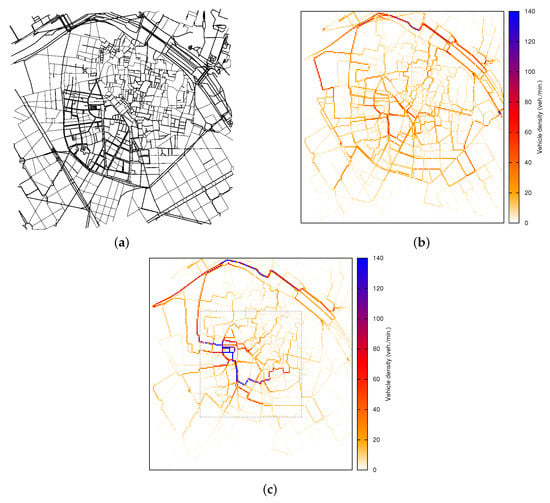
Figure 5.
Scenario 2: City of Valencia, Spain. (a) Street map layout; (b) Krauss model: vehicular density for each street; (c) Downtown model: vehicular density for each street in the downtown (square box).
The reason behind using two different layouts is to confirm the potential of GARSUD, i.e., that our approach provides suitable solutions for different roadmap layout complexities, as RSU deployment is a challenging task, particularly for maps with a complex layout in terms of vehicular communications, e.g., those with short streets irregularly arranged, very frequent in old European cities.
The mobility of vehicles simulated, at a macroscopic level (i.e., global motion constraints such as streets, roads, junctions and traffic lights), was obtained with the CityMob for Roadmaps (C4R) (v. 2, University of Zaragoza, Teruel, SPA, 2017) (C4R is freely available at http://www.grc.upv.es/software/), which is a realistic traffic generator software based on SUMO (v. 0.11.1, the German Aerospace Center, Cologne, GER, 2017) [27]. Regarding the mobility at the microscopic level (i.e., movements of each vehicle and its behavior with respect to others), it has been modeled using two different mobility patterns.
The RSU deployment policy should be suitable for different traffic distributions. Hence, we simulated two different mobility conditions: (i) the Krauss model, considering traffic lights, multi-lane behavior [28] and that vehicles are uniformly distributed along the map (see Figure 4b and Figure 5b); and (ii) the downtown model [29], which additionally considers that urban areas present diverse vehicle densities, i.e., vehicles may not be uniformly distributed and there are points of interest that may attract the vehicles (see Figure 4c and Figure 5b). The methodology used shows that our approach provides suitable RSU deployments regardless of the special characteristics of the traffic distribution in the map.
To run simulations, we have used the ns-2 simulator [30] (v. 33, University of Southern California, Los Angeles, CA, USA, 2008), including the IEEE 802.11p [31] standard so as to closely simulate the Wireless Access in Vehicular Environments (WAVE) standard. Concerning the physical layer, the data rate set for packet broadcasting is 6 Mbit/s, as this is the maximum rate for broadcasting under the IEEE 802.11p. In terms of the Medium Access Control (MAC) layer, channel access priorities were implemented: four different Access Categories (ACs), where AC0 has the lowest and AC3 the highest priority, providing a different priority for application messages.
In order to keep the simulations close to real-world behavior and features, we have modified the simulator to make use of our Real Attenuation and Visibility (RAV) propagation model [32], which increases the level of realism of the vehicular network simulations by taking into account real urban roadmap layers and obstacles that have strong effects on the wireless impairments, hence the signal propagation. The RAV model is based on real-world measurements and accounts for attenuation and fading due to radio obstacles.
Regarding data traffic, vehicles operate in two modes: (a) warning mode and (b) normal mode. Warning-mode vehicles inform other vehicles about their status by sending periodically, every seconds, warning messages. Such messages have the highest priority at the MAC layer (similarly to the Decentralized Environmental Notification Messages (DENMs) defined by the European Telecommunications Standards Institute (ETSI) [33]). Normal-mode vehicles enable the forwarding of the warning packets. They also send periodically (every seconds) beacons with information such as their positions, speed, etc. (similar to the Cooperative Awareness Messages (CAMs) also defined by ETSI). These periodic beacons are not propagated by other vehicles, and they have a lower priority than warning messages.
Finally, as the desired RSU deployment should be suitable for a wide range of vehicle densities, we tested different number of vehicles involved in the simulations: 50 (12.5 vehicles/km), 100 (25 vehicles/km), 200 (50 vehicles/km), 300 (75 vehicles/km) and 400 (100 vehicles/km).
Table 2 presents the parameter set in our simulations.
Table 2.
Parameter values for the simulations.
5. Simulation Results
In this section, we present the results obtained by our proposal. First, we study the performance of the genetic algorithm used within the GARSUD approach to search the solution among all the available locations for the RSUs. Second, we present a comparison between GARSUD and other existing RSU deployment strategies (i.e., geographic and the D-RSU). To ensure that the results we have obtained are representative, all the results included in this paper represent an average of three runs.
5.1. Performance of the Genetic Algorithm Used by GARSUD
We tested GARSUD for both the Madrid and Valencia layouts using different vehicle densities, representing diverse traffic flows in different time periods during a given day. Existing approaches are able to perform well considering one single vehicle density only; our proposal, GARSUD, is capable of finding a suitable RSU deployment strategy for a wide range of densities and map layouts.
Figure 6 presents the evolutionary process, in terms of the fitness of the best and average individuals (representing possible deployments) using GARSUD in two different situations (i.e., deploying four RSUs and nine RSUs) and two different scenarios (i.e., Madrid and Valencia). The fitness function is related to the average warning notification time of the messages heading towards the RSUs, as expressed in Equation (1); however, the algorithm is designed for function maximization, and hence, the fitness function is inversely proportional to the measured warning notification time, which should present the lowest value possible. Notice that the main objective is to reduce the warning notification time, and a fitness value of 100 represents a warning notification time equal to 0 s.
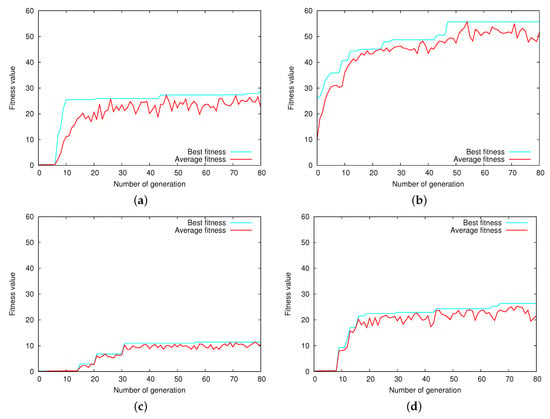
Figure 6.
Fitness evolution of the individuals in the populations using GARSUD. (a) Four RSUs in Madrid; (b) 9 RSUs in Madrid; (c) 4 RSUs in Valencia; (d) 9 RSUs in Valencia.
As shown in Figure 6, the genetic algorithm is able to guide the search process, obtaining improved solutions as generations advance by every iteration. The shape of the function is typical of this sort of algorithm: the first generations provide a steep improvement of the target function until the solutions start to converge towards the nearest maximum. However, there are some sudden improvements in the best value, as the mutation operator allows searching new areas of the solution space where new maximums can be found.
Concerning the fitness values obtained, it is distinguishable how increasing the number of RSUs deployed improves the value of the target function of the solutions, especially in Madrid, as using more RSUs allows warning messages covering a broader area with fewer hops. It is also noticeable that the maximum fitness values are obtained in Madrid. This confirms that more time is required to inform the rest of the vehicles in Valencia since its map layout is more complex in terms of communication capabilities (i.e., the warning notification time is higher when compared to Madrid).
A detailed view of the evolutionary process is presented in Figure 7 and Figure 8. These figures depict the RSU locations provided by GARSUD when deploying nine RSUs in Madrid and Valencia, respectively. To enhance the understanding of the evolutionary process, four intermediate locations selected during the first stages of the algorithm are presented (i.e., from Generation 0 to 20, from Generation 20 to 40, from Generation 40 to 60 and, finally, from Generation 60 to 80).
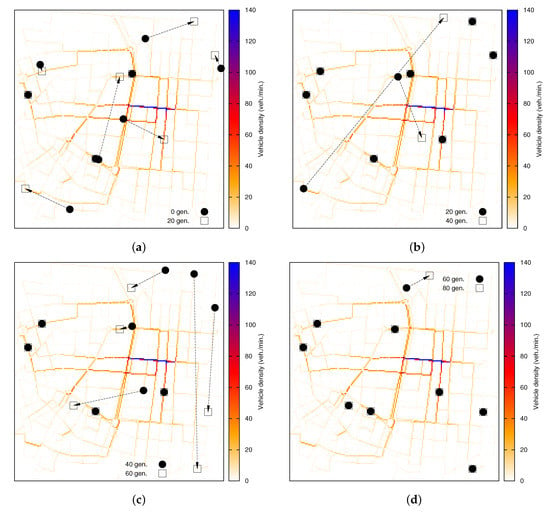
Figure 7.
Evolution of the deployment of nine RSUs in the Madrid scenario using GARSUD. (a) After 20 generations; (b) after 40 generations; (c) after 60 generations; (d) after 80 generations.
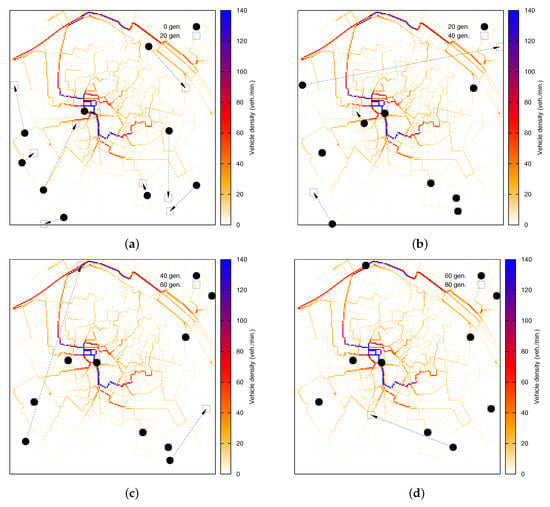
Figure 8.
Evolution of the deployment of nine RSUs in the Valencia scenario using GARSUD. (a) After 20 generations; (b) after 40 generations; (c) after 60 generations; (d) after 80 generations.
Figure 7 shows the evolution of the algorithm when deploying nine RSUs in Madrid. The number of potential deployments grows drastically when more RSUs are considered; thus, more generations are needed until convergence (as previously evidenced by Figure 6). The search space is bigger, and the random nature of the process makes it possible to find new optima during further stages of the algorithm. As observed, the locations of several RSUs are modified during the first 60 generations, and after that, eight RSUs are placed in their final location; the remaining one is moved.
As depicted by Figure 8, when nine RSUs are available to be deployed in Valencia, we find a slightly different behavior trend compared to Madrid. In particular, the initial random deployment is widely modified during the first generations, achieving a completely different distribution of RSUs after 20 generations. This corresponds to the major gain in the fitness of the solutions as previously mentioned. After this stage, the variability of the solutions is reduced, and some RSUs are assigned to their final position, whereas some others still vary their location to slightly reduce the warning notification time in the solution. As expected, genetic algorithms progressively reduce the variation of the solutions until they converge towards their final solution.
Figure 9 presents the average warning notification time when deploying four and nine RSUs, in both map layouts (i.e., Madrid and Valencia), where different vehicle densities are considered. As shown, the warning notification time is reduced with each new generation of solutions for almost all the selected densities, in particular in low-density scenarios. It is reduced in Madrid from 30.25 s to 5 s when only 100 vehicles are present in the scenario, which represents over an 80% improvement. The final reduction is also about 80% for 200 vehicles and about 60% for 300 vehicles. The improvement when simulating 400 vehicles is very reduced, since increasing the density of vehicles over this threshold increases the probability of finding a connected path of vehicles between a sender vehicle and an RSU. As shown, the biggest improvement in terms of warning notification time is obtained during the first 40 generations, whereas the last 20 generations only provide a slight reduction when 100 vehicles are simulated.
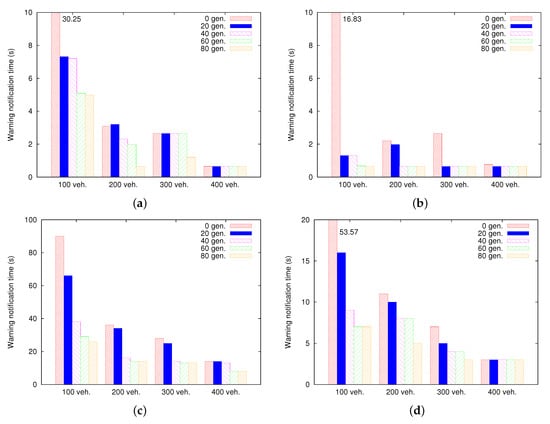
Figure 9.
Evolution of warning notification time for each vehicle density: Madrid and Valencia scenarios. (a) Four RSUs: Madrid; (b) 9 RSUs: Madrid; (c) 4 RSUs: Valencia; (d) 9 RSUs: Valencia.
Studying the results in Valencia, we observe that similar to Madrid, the biggest improvement in terms of warning notification time takes place during the first 40 generations of the search process, reducing by about 85% the warning notification time when 100 vehicles are simulated and by about 60% when 200 vehicles are present in the scenario. The improvement during the final part of the process is lower because the genetic algorithm is mostly refining the solutions instead of exploring new areas of the search space. Again, the improvement for high vehicle densities is less noticeable as it is more likely to find a forward path from the warning nodes to the RSUs. Nevertheless, the number of hops needed to overcome the complex layout and reach an RSU is higher, thus increasing the warning notification in all vehicle densities compared to Madrid. These results prove that random RSU deployments are highly inefficient, particularly for low vehicle densities, and the effect of traffic distribution should be taken into account to obtain efficient RSU deployment policies.
5.2. Performance Comparison between GARSUD and Other Existing Approaches
Several schemes have been proposed in order to achieve an efficient RSU deployment in a given scenario, but most of them do not provide enough details to perform a fair comparison. In order to obtain relevant performance results, two well-known algorithms were chosen: (i) geographic deployment and (ii) D-RSU. The geographic approach [4] provides a uniform coverage of an area by maximizing the distance between RSUs. We slightly modified the geographic approach to place each RSU in main street crosses, facilitating the communication with vehicles. On the contrary, the D-RSU scheme [4] requires previous knowledge of the distribution of vehicular traffic to perform an asymmetric deployment, assigning less RSUs to the areas with higher vehicle densities (where the wireless multi-hop communication is easier), while increasing the number of RSUs to cover areas with fewer vehicles where communication is often blocked by buildings, urban fixtures and other obstacles. We have compared, in both the Madrid and Valencia scenarios, the performance of our proposed GARSUD algorithm against these two existing schemes (i.e., geographic and D-RSU) in terms of warning notification time.
Figure 10 depicts the different deployment schemes. As shown, the geographic distribution does not account for different traffic densities in different areas of the cities; it tries to increase the coverage area by deploying RSUs in a grid fashion. On the other hand, the D-RSU assigns a fixed number of RSUs to each subarea (i.e., downtown and outskirts) as a function of the expected vehicle densities. The D-RSU does not consider the street layout of each area to find the most suitable location for the available RSUs, but it applies a geographic mechanism to each individual subarea given the number of RSUs to be deployed.
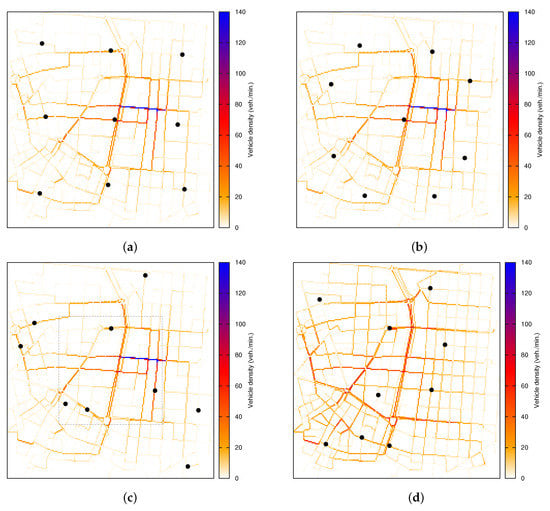
Figure 10.
Comparison of the different RSU deployment policies for nine RSUs: Madrid scenario. (a) Geographic approach; (b) Density-based Road Side Unit deployment policy (D-RSU); (c) GARSUD with a central downtown; (d) GARSUD uniform traffic flow (i.e., without any downtown).
Regarding GARSUD, in order to better observe the effect of different traffic flows on RSU deployment and to further explore the flexibility of our proposal, Figure 10c,d and Figure 11c,d show the final positions of the nine RSUs, in Madrid and Valencia, computed by GARSUD in the two cases: (a) accounting for a central downtown area commonly observed in real cities and (b) a more uniform traffic distribution where no clear attraction points exist in the vicinity, a traffic pattern more likely to be found in the outskirts of cities and rural areas.
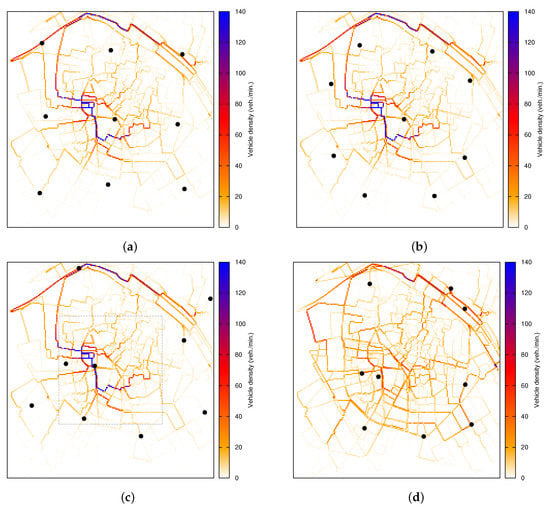
Figure 11.
Comparison of the different RSU deployment policies for nine RSUs: Valencia scenario. (a) Geographic deployment; (b) D-RSU; (c) GARSUD with a central downtown; (d) GARSUD uniform traffic flow (i.e., without any downtown).
Noticeable differences in the computed deployment can be detected in the results, since RSUs in Figure 10c are located mainly in the areas with low density where communication is often blocked by buildings, and incomplete paths between the sender and the RSUs can be found in a reasonable time. However, the distribution of RSUs is more compact in Figure 10d, where only a few selected locations in the surrounding areas are enough to reduce the warning notification time. This philosophy is the basis of the D-RSU deployment scheme where the RSUs are distributed inversely proportional to the vehicle density, but unlike GARSUD, the specific locations in each area are determined using geographic uniform distribution, not exploiting the street layout of the scenario.
Figure 11 shows the same results for the Valencia map layout, and again, the distribution of RSUs computed by GARSUD is coherent with the principles followed by D-RSU, with more RSUs covering areas with low vehicle density where successful communications are harder to achieve, but the deployment obtained is far from following a geographic distribution.
Figure 12 presents the average warning notification time using the geographic deployment, the D-RSU and our GARSUD approach for both the Madrid and Valencia map layouts. These results confirm the potential of GARSUD, i.e., that our approach provides suitable solutions for different layout complexities, varying vehicle densities, as well as different mobility patterns.
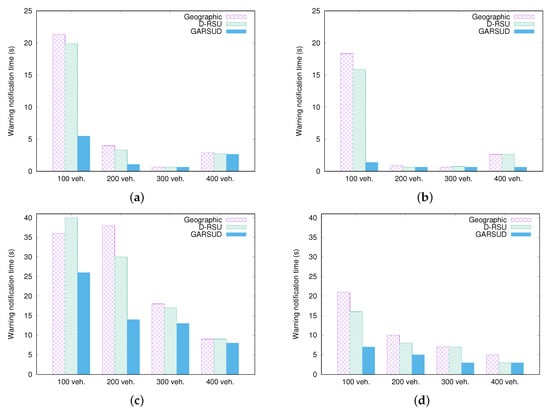
Figure 12.
Warning notification time in Madrid and Valencia with a central downtown area when varying the density of vehicles. (a) Four RSUs: Madrid scenario; (b) 9 RSUs: Madrid scenario; (c) 4 RSUs: Valencia scenario; (d) 9 RSUs: Valencia scenario.
As demonstrated, GARSUD outperforms both the geographic and the D-RSU schemes, reducing the time required to notify safety authorities about dangerous situation, by testing the computed deployments against several realistic traffic patterns until the best result is found.
Regarding Madrid (see Figure 12a,b), the improvement is particularly noticeable in low-density situations, where our GARSUD approach only requires 25% and 15% of the time needed by the other two RSU placement schemes, when deploying 4 and 9 RSUs, respectively. Notice that increasing the vehicular density over 400 vehicles (i.e., 100 vehicles/km) in Madrid, the overall performance of the three schemes is reduced. This is due to high densities increasing the communication packets’ contention and collisions in the shared transmission medium, forcing packet retransmission and delaying the overall dissemination system. Nevertheless, this effect is reduced by GARSUD (see Figure 12b) since it selects the most adequate location for the RSUs (e.g., RSUs are placed on the junctions where the average wireless traffic does not exceed the capacity of the channel).
As for Valencia (see Figure 12c,d), GARSUD clearly outperforms both the geographic and D-RSU schemes in all the vehicle densities tested. Compared to Madrid, the warning notification time obtained is noticeably higher due to the increased complexity of the map, therefore creating blind areas where vehicles are isolated without access to RSUs. As an example, the average warning notification time in simulations involving 200 vehicles was below 5 s for all schemes when the scenario was the Madrid layout, whereas this time ranges between 14.57 s for GARSUD and 38.28 s using the geographic deployment. However, the results obtained by our proposal are the most suitable in all the tested scenarios. As demonstrated, the RSU deployment determined by GARSUD is suitable under a wide range of vehicle densities, ranging from rush hours to off-peak traffic times.
Regarding the performance of GARSUD in Valencia when using the Krauss mobility model to simulate a more uniform traffic distribution in the map, the probability of isolated clusters of vehicles unable to reach RSUs is increased, especially when the number of RSUs is too low to cover a significant portion of the area. Comparing warning notification time between approaches is complicated in this kind of complex environment since there are many situations where vehicles are not able to communicate with any available RSU during all the simulation time. To illustrate this condition, Table 3 and Table 4 show the results of three warning mode vehicles in a given scenario using the three different RSU deployment policies studied, including GARSUD. As can be seen, those vehicles not being able to communicate with any available RSU are marked with a hyphen (-). The final deployments provided by each policy (i.e., geographic, D-RSU and GARSUD) were previously presented in Figure 11.
Table 3.
Warning notification time (in seconds) for each warning vehicle when deploying 4 RSUs in Valencia considering a uniform traffic flow. D-RSU, Density-based Road Side Unit deployment policy.
Table 4.
Warning notification time (in seconds) for each warning vehicle when deploying 9 RSUs in Valencia considering a uniform traffic flow.
As demonstrated, using a simple geographic distribution is highly ineffective under these especially adverse conditions. In fact, several vehicles are not able to reach any deployed RSU even under high vehicle density conditions. This confirms that the traffic flow is a crucial part of the scenario and should be taken into account to achieve adequate RSU deployments.
The amount of communications having failed using the D-RSU is more reduced, although several vehicles that are not able to report their information can be found when using four RSUs, as well. On the contrary, the deployments obtained with GARSUD allow communication for all the densities analyzed.
In order to provide a comprehensive performance analysis of the GARSUD solution, we also performed the same study in the Madrid scenario. Table 5 and Table 6 present the study applying the Krauss mobility model considering four and nine RSU deployments, respectively. As mentioned along the paper, the Madrid map layout presents a less complex scenario than Valencia; therefore, all vehicles were able to communicate and to transmit their messages under all RSU deployment policies. As observed in both tables, GARSUD always performs better than the other two solutions, allowing vehicles to transmit the warning notification messages faster. Figure 10 presents the final deployments for the Madrid scenario achieved by each RSU deployment policy (i.e., geographic, D-RSU and GARSUD).
Table 5.
Warning notification time (in seconds) for each warning vehicle when deploying 4 RSUs in Madrid considering a uniform traffic flow.
Table 6.
Warning notification time (in seconds) for each warning vehicle when deploying 9 RSUs in Madrid considering a uniform traffic flow.
Overall, as demonstrated across the different sets of experiments, our approach outperforms others in a variety of scenarios such as different vehicular densities, map layouts and considering different mobility models.
6. Conclusions
In this paper, we proposed a genetic-algorithm-based RSU deployment scheme, called GARSUD, which is capable of automatically determining the optimal RSU location to enhance warning message delivery in any given roadmap layout, ranging from regular to complex city map layouts. Simulation results, based on realistic traces and map layouts, demonstrate that GARSUD is able to reduce the warning notification time in different map layouts, including complex scenarios, under different vehicular densities, as well as when a different number of RSUs needs to be deployed. Additionally, GARSUD improves vehicular communication capabilities, especially in complex layouts since it increases the probabilities that warning messages can be received by emergency services.
To the best of our knowledge, existing approaches are able to perform well under single vehicle density, as well as single street lane mobility models. Our proposal has been proven to pinpoint suitable solutions for a wide range of densities, vehicle traffic distributions and map layouts.
In the future, we plan to deploy a real testbed in order to confirm the performance of our GARSUD approach in a real environment. In addition, we consider that our proposal could be extrapolated by other applications in intelligent transportation systems, especially those that require the use of infrastructure elements.
Acknowledgments
This work was partially supported by the Ministerio de Economía y Competitividad, Programa Estatal de Investigación, Desarrollo e Innovación Orientada a los Retos de la Sociedad, Proyectos I+D+I 2014, Spain, under Grant TEC2014-52690-R, by the Government of Aragón and the European Social Fund (T91 Research Group), and by the Ministerio de Educación, Cultura y Deporte within the framework of Programa Estatal de Promoción del Talento y su Empleabilidad en I+D+i, Subprograma Estatal de Movilidad, del Plan Estatal de Investigación Científica y Técnica y de Innovación 2013–2016.
Author Contributions
All authors contributed extensively to the work presented in this paper, i.e., to the genetic algorithm-based approach, to the research concept, to the experiment design and to analyzing the experimental results. In particular, Manuel Fogue, Francisco J. Martinez and Julio A. Sanguesa proposed the main idea, Manuel Fogue and Julio A. Sanguesa designed the system and performed the experiments. Johann M. Marquez-Barja, Francisco J. Martinez and Manuel Fogue discussed the results and implications, driving the required improvements to the research aspects, as well as contributing to the manuscript at all stages. All authors participated in revising the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Marquez-Barja, J.M.; Ahmadi, H.; Tornell, S.M.; Calafate, C.T.; Cano, J.C.; Manzoni, P.; DaSilva, L.A. Breaking the Vehicular Wireless Communications Barriers: Vertical Handover Techniques for Heterogeneous Networks. IEEE Trans. Veh. Technol. 2015, 64, 5878–5890. [Google Scholar] [CrossRef]
- Marquez-Barja, J.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Performance trade-offs of a IEEE 802.21-based vertical handover decision algorithm under different network conditions. In Proceedings of the 10th IEEE International Symposium on Network Computing and Applications (NCA11), Cambridge, MA, USA, 25–27 August 2011; pp. 294–297. [Google Scholar]
- Tao, J.; Zhu, L.; Wang, X.; He, J.; Liu, Y. RSU deployment scheme with power control for highway message propagation in VANETs. In Proceedings of the IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 169–174. [Google Scholar]
- Barrachina, J.; Garrido, P.; Fogue, M.; Martinez, F.; Cano, J.; Calafate, C.; Manzoni, P. Road Side Unit Deployment: A Density-Based Approach. IEEE Intell. Transp. Syst. Mag. 2013, 5, 30–39. [Google Scholar] [CrossRef]
- Król, D.; Lasota, T.; Trawinski, B.; Trawinski, K. Investigation of evolutionary optimization methods of TSK fuzzy model for real estate appraisal. Int. J. Hybrid Intell. Syst. 2008, 5, 111–128. [Google Scholar] [CrossRef]
- Dzeng, R.J.; Lee, H.Y. Optimizing the development schedule of resort projects by integrating simulation and genetic algorithm. Int. J. Proj. Manag. 2007, 25, 506–516. [Google Scholar] [CrossRef]
- Morano, P.; Tajani, F.; Locurcio, M. GIS application and econometric analysis for the verification of the financial feasibility of roof-top wind turbines in the city of Bari (Italy). Renew. Sustain. Energy Rev. 2017, 70, 999–1010. [Google Scholar]
- Makkawi, A.; Daher, R.; Rizk, R. RSUs placement using cumulative weight based method for urban and rural roads. In Proceedings of the 7th International Workshop on Reliable Networks Design and Modeling (RNDM), Munich, Germany, 5–7 October 2015; pp. 307–313. [Google Scholar]
- Liu, Y.; Ma, J.; Niu, J.; Zhang, Y.; Wang, W. Roadside units deployment for content downloading in vehicular networks. In Proceedings of the IEEE International Conference on Communications (ICC), Budapest, Hungary, 9–13 June 2013; pp. 6365–6370. [Google Scholar]
- Cumbal, R.; Palacios, H.; Hincapie, R. Optimum deployment of RSU for efficient communications multi-hop from vehicle to infrastructure on VANET. In Proceedings of the IEEE Colombian Conference on Communications and Computing (COLCOM), Cartagena, Colombia, 27–29 April 2016; pp. 1–6. [Google Scholar]
- Trullols, O.; Fiore, M.; Casetti, C.; Chiasserini, C.; Ordinas, J.B. Planning roadside infrastructure for information dissemination in intelligent transportation systems. Comput. Commun. 2010, 33, 432–442. [Google Scholar] [CrossRef]
- Cavalcante, E.S.; Aquino, A.L.; Pappa, G.L.; Loureiro, A.A. Roadside Unit Deployment for Information Dissemination in a VANET: An Evolutionary Approach. In Proceedings of the 14th Annual Conference Companion on Genetic and Evolutionary Computation, GECCO ’12, Philadelphia, PA, USA, 7–11 July 2012; ACM: New York, NY, USA, 2012; pp. 27–34. [Google Scholar]
- Kim, D.; Velasco, Y.; Wang, W.; Uma, R.; Hussain, R.; Lee, S. A New Comprehensive RSU Installation Strategy for Cost-Efficient VANET Deployment. IEEE Trans. Veh. Technol. 2017, 66, 4200–4211. [Google Scholar] [CrossRef]
- Jo, Y.; Jeong, J. RPA: Road-Side Units Placement Algorithm for Multihop Data Delivery in Vehicular Networks. In Proceedings of the 30th International Conference on Advanced Information Networking and Applications Workshops (WAINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 262–266. [Google Scholar]
- Song, Y.; Lin, B.; Tian, Y.; Ding, N.; He, R.; Zhao, T. Heterogeneous Roadside Unit Placement in Eco-Sustainable Communication Networks for Intelligent Transportation. In Proceedings of the Ninth International Conference on Frontier of Computer Science and Technology, Dalian, China, 26–28 August 2015; pp. 214–219. [Google Scholar]
- Zhang, B.; Zhu, G.; Xu, S.; Zhang, N. Energy-efficient roadside units deployment in Vehicular Ad hoc Networks. In Proceedings of the 6th International Conference on Wireless, Mobile and Multi-Media (ICWMMN 2015), Beijing, China, 20–23 November 2015; pp. 6–10. [Google Scholar]
- Liang, Y.; Liu, H.; Rajan, D. Optimal Placement and Configuration of Roadside Units in Vehicular Networks. In Proceedings of the 2012 IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; pp. 1–6. [Google Scholar]
- Wang, Y.; Zheng, J.; Mitton, N. Delivery Delay Analysis for Roadside Unit Deployment in Vehicular Ad Hoc Networks With Intermittent Connectivity. IEEE Trans. Veh. Technol. 2016, 65, 8591–8602. [Google Scholar] [CrossRef]
- Filippini, I.; Malandrino, F.; Dán, G.; Cesana, M.; Casetti, C.; Marsh, I. Non-cooperative RSU deployment in vehicular networks. In Proceedings of the 2012 9th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Courmayeur, Italy, 9–11 January 2012; pp. 79–82. [Google Scholar]
- Massobrio, R.; Bertinat, S.; Nesmachnow, S.; Toutouh, J.; Alba, E. Smart placement of RSU for vehicular networks using multiobjective evolutionary algorithms. In Proceedings of the Latin America Congress on Computational Intelligence (LA-CCI), Curitiba, Brazil, 13–16 October 2015; pp. 1–6. [Google Scholar]
- Kibilda, J.; Galkin, B.; DaSilva, L.A. Modelling Multi-Operator Base Station Deployment Patterns in Cellular Networks. IEEE Trans. Mob. Comput. 2016, 15, 3087–3099. [Google Scholar] [CrossRef]
- Eiben, A.; Smith, J. Introduction to Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Reeves, C.R.; Rowe, J.E. Genetic Algorithms: Principles and Perspectives: A Guide to GA Theory; Kluwer Academic Publishers: Norwell, MA, USA, 2002. [Google Scholar]
- Miller, B.L.; Goldberg, D.E. Genetic Algorithms, Tournament Selection, and the Effects of Noise. Complex Syst. 1995, 9, 193–212. [Google Scholar]
- Liao, Y.H.; Sun, C.T. An Educational Genetic Algorithms Learning Tool. IEEE Trans. Educ. 2001, 44. [Google Scholar] [CrossRef]
- Wakunda, J.; Zell, A. A new selection scheme for steady-state evolution strategies. In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO), Las Vegas, NV, USA, 8–12 July 2000; pp. 794–801. [Google Scholar]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of SUMO—Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Krajzewicz, D.; Hertkorn, G.; Rossel, C.; Wagner, P. SUMO (Simulation of Urban MObility)—An open-source traffic simulation. In Proceedings of the 4th Middle East Symposium on Simulation and Modelling (MESM 2002), Sharjah, UAE, 28–30 October 2002; pp. 183–187. [Google Scholar]
- Martinez, F.J.; Cano, J.C.; Calafate, C.T.; Manzoni, P. A Performance Evaluation of Warning Message Dissemination in 802.11p based VANETs. In Proceedings of the IEEE Local Computer Networks Conference (LCN), Zurich, Switzerland, 20–23 October 2009; pp. 221–224. [Google Scholar]
- Fall, K.; Varadhan, K. ns Notes and Documents. The VINT Project. UC Berkeley, LBL, USC/ISI, and Xerox PARC. 2000. Available online: http://www.isi.edu/nsnam/ns/ns-documentation.html (accessed on 1 January 2018).
- IEEE 802.11 Working Group. IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments; IEEE Standards Association: Piscataway, NJ, USA, 2010. [Google Scholar]
- Martinez, F.J.; Fogue, M.; Toh, C.; Cano, J.C.; Calafate, C.T.; Manzoni, P. Computer Simulations of VANETs Using Realistic City Topologies. Wirel. Pers. Commun. 2013, 69, 639–663. [Google Scholar] [CrossRef]
- European Telecommunications Standards Institute. Intelligent Transport Systems (ITS); Communications Architecture. ETSI EN 302 665. 2010. Available online: http://www.etsi.org/deliver/etsi_en/302600_302699/302665/01.01.01_60/en_302665v010101p.pdf (accessed on 1 January 2018).
- Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.C.; Calafate, C.T.; Manzoni, P. A Realistic Simulation Framework for Vehicular Networks. In Proceedings of the 5th International ICST Conference on Simulation Tools and Techniques (SIMUTools), Desenzano del Garda, Italy, 19–23 March 2012; pp. 37–46. [Google Scholar]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).