
Human-Like Walking with Heel Off and Toe Support for Biped Robot



Abstract
:1. Introduction
2. Methods
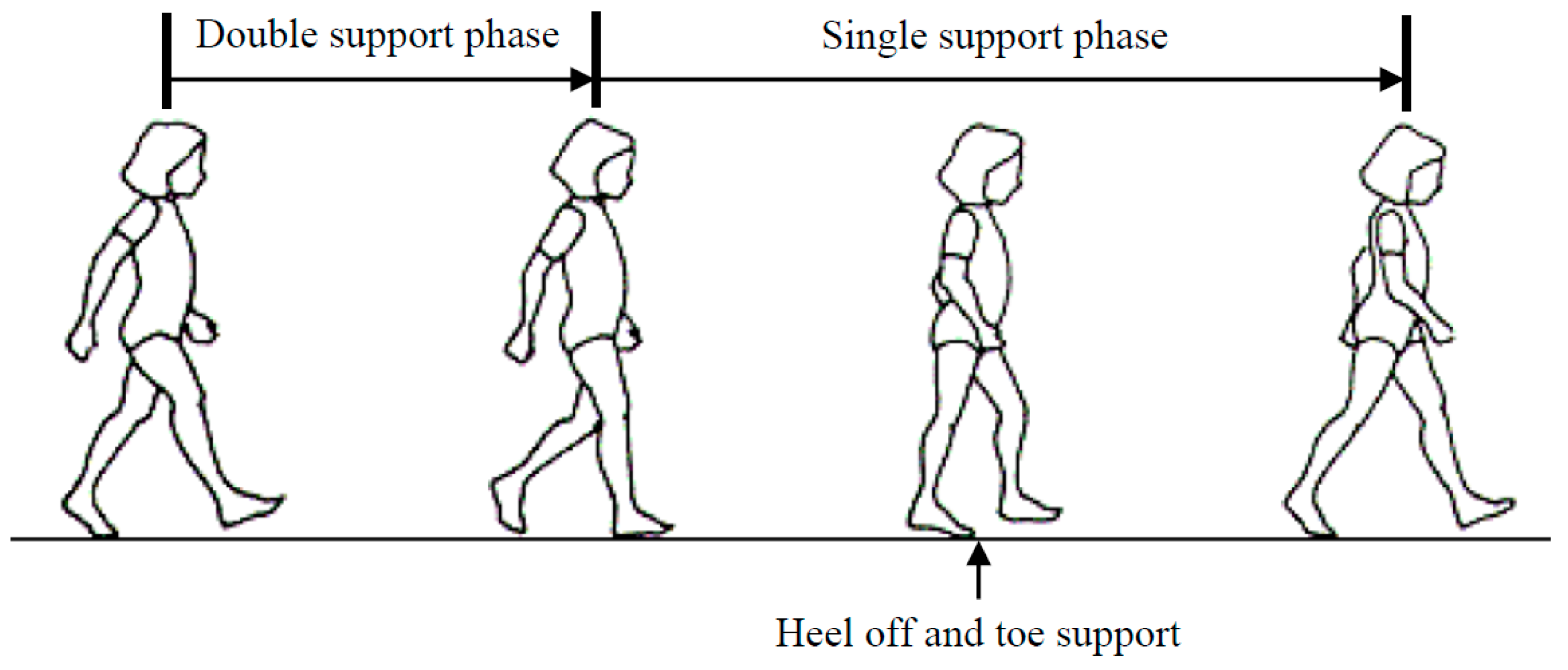
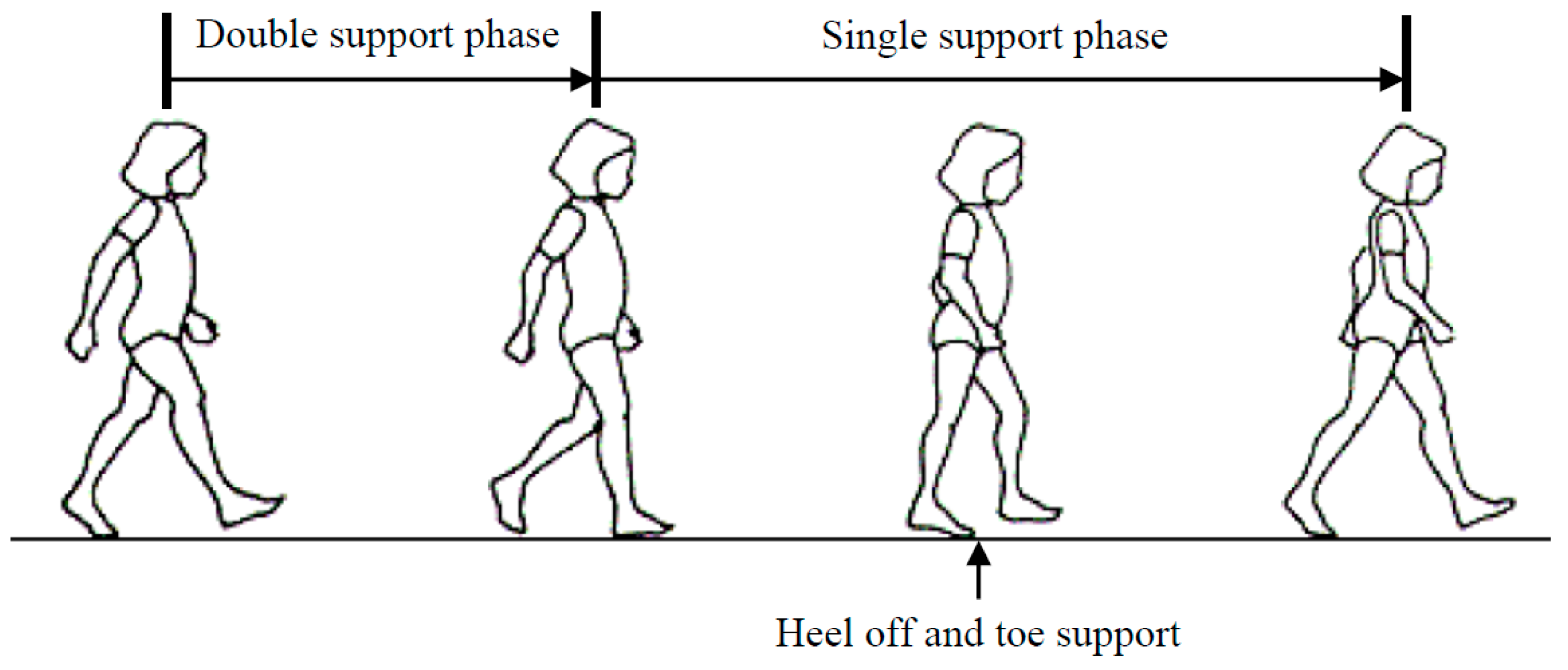
2.1. Human Walking Pattern Analysis
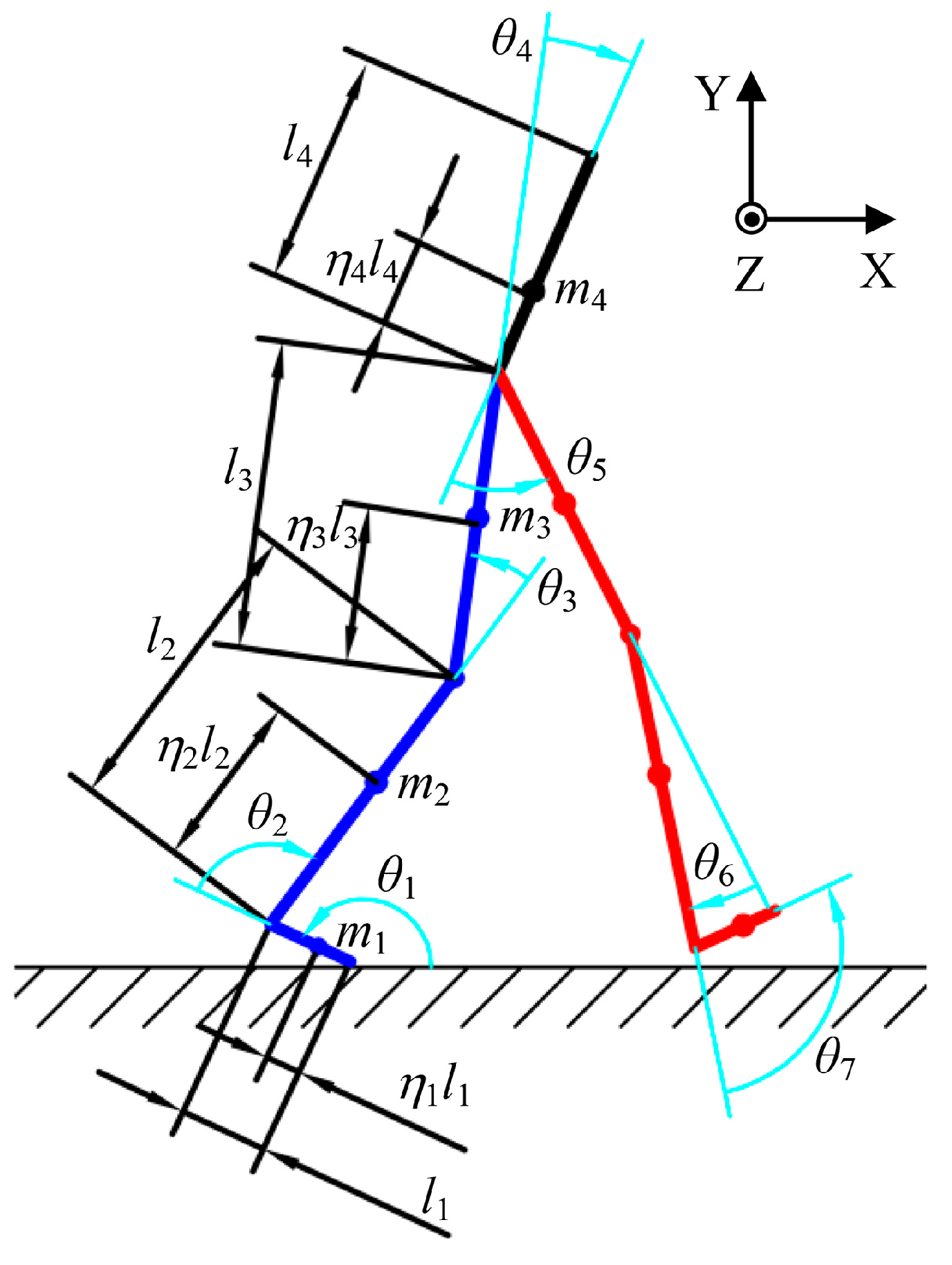
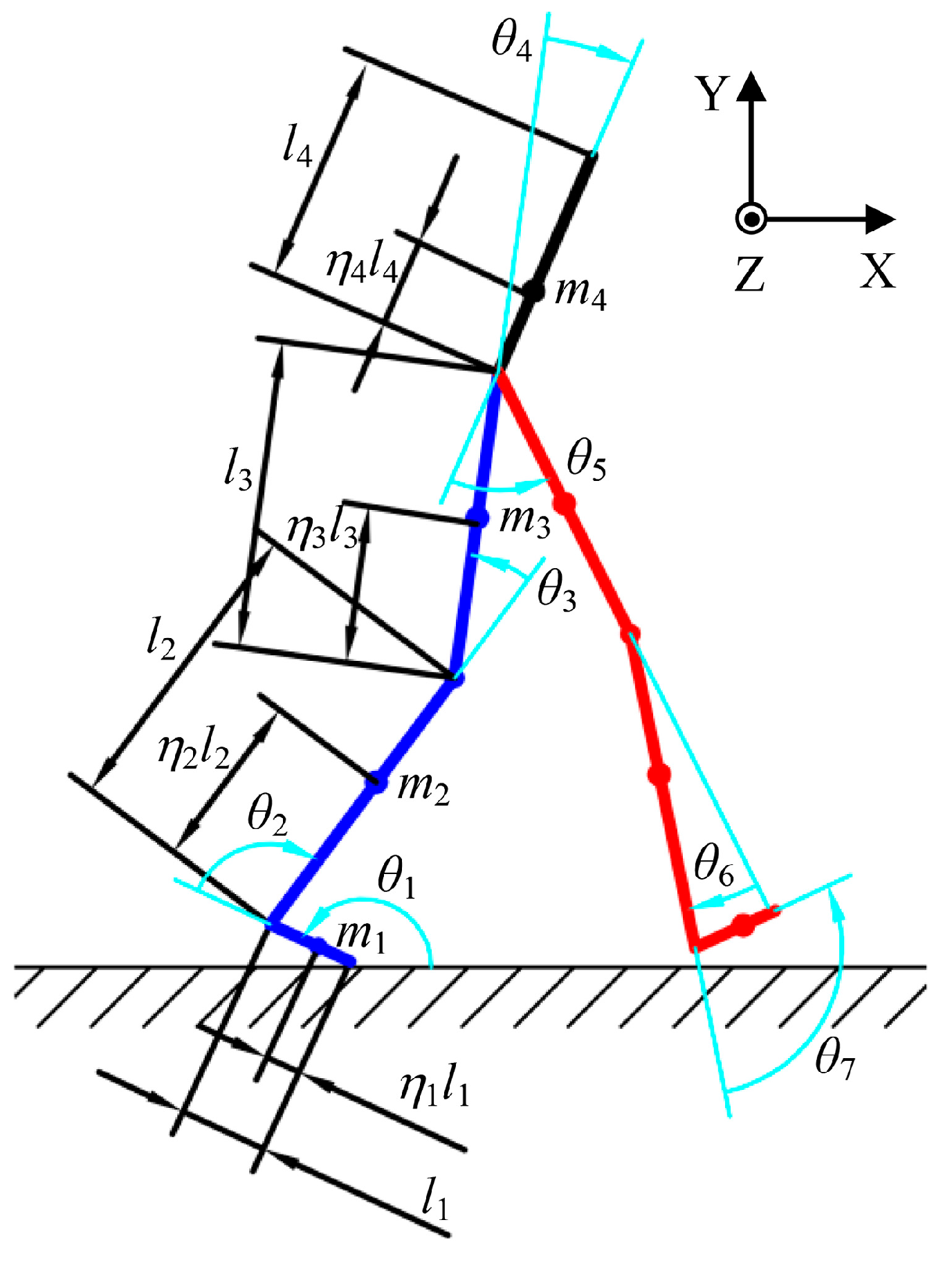
2.2. The Biped Robot Model
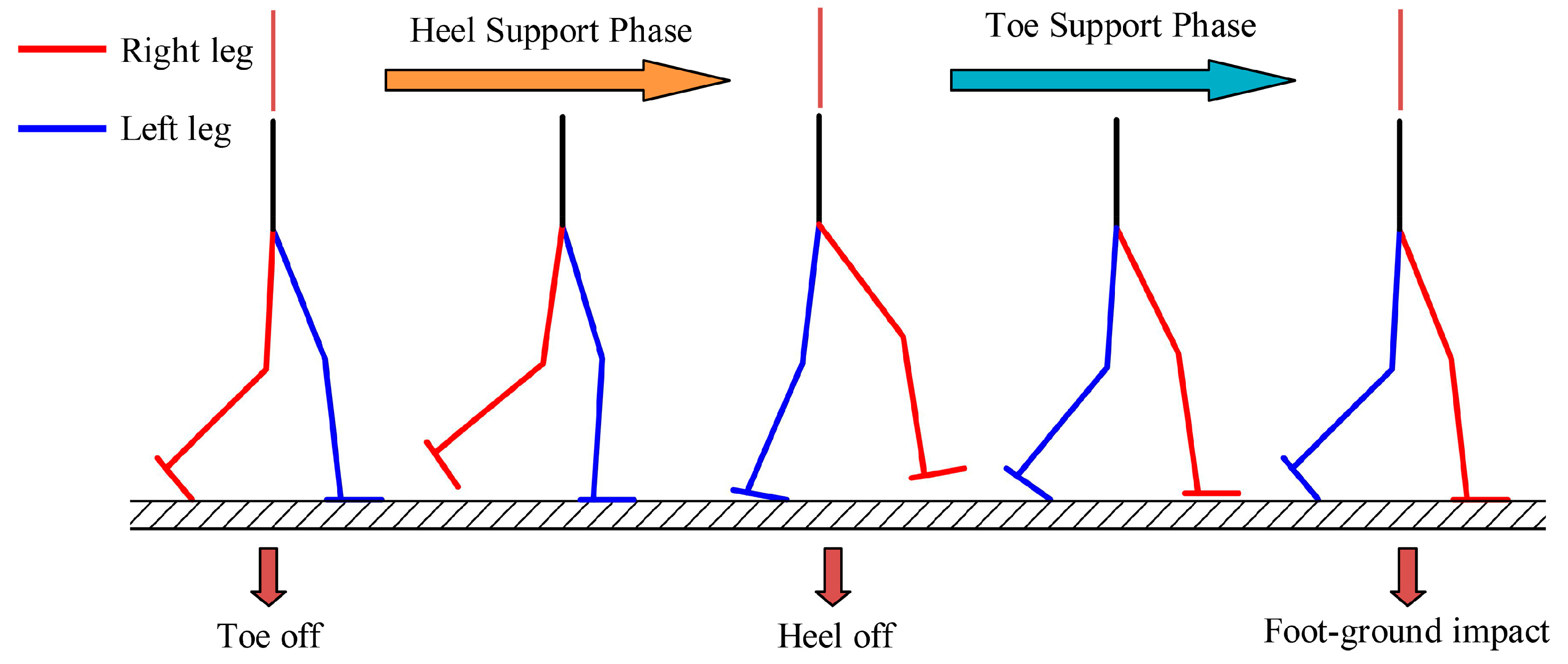
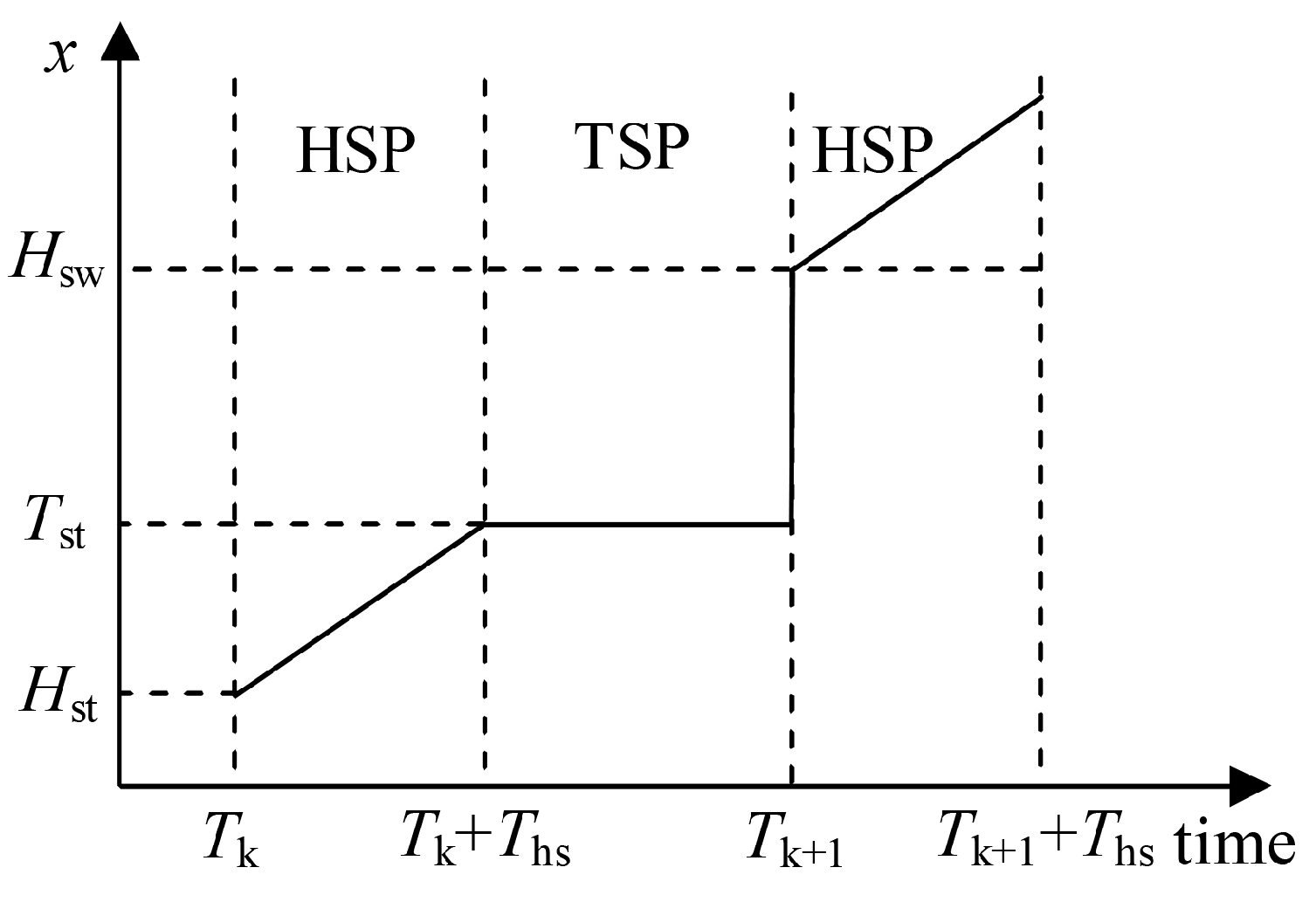
2.3. The Bipedal Robotic Gait
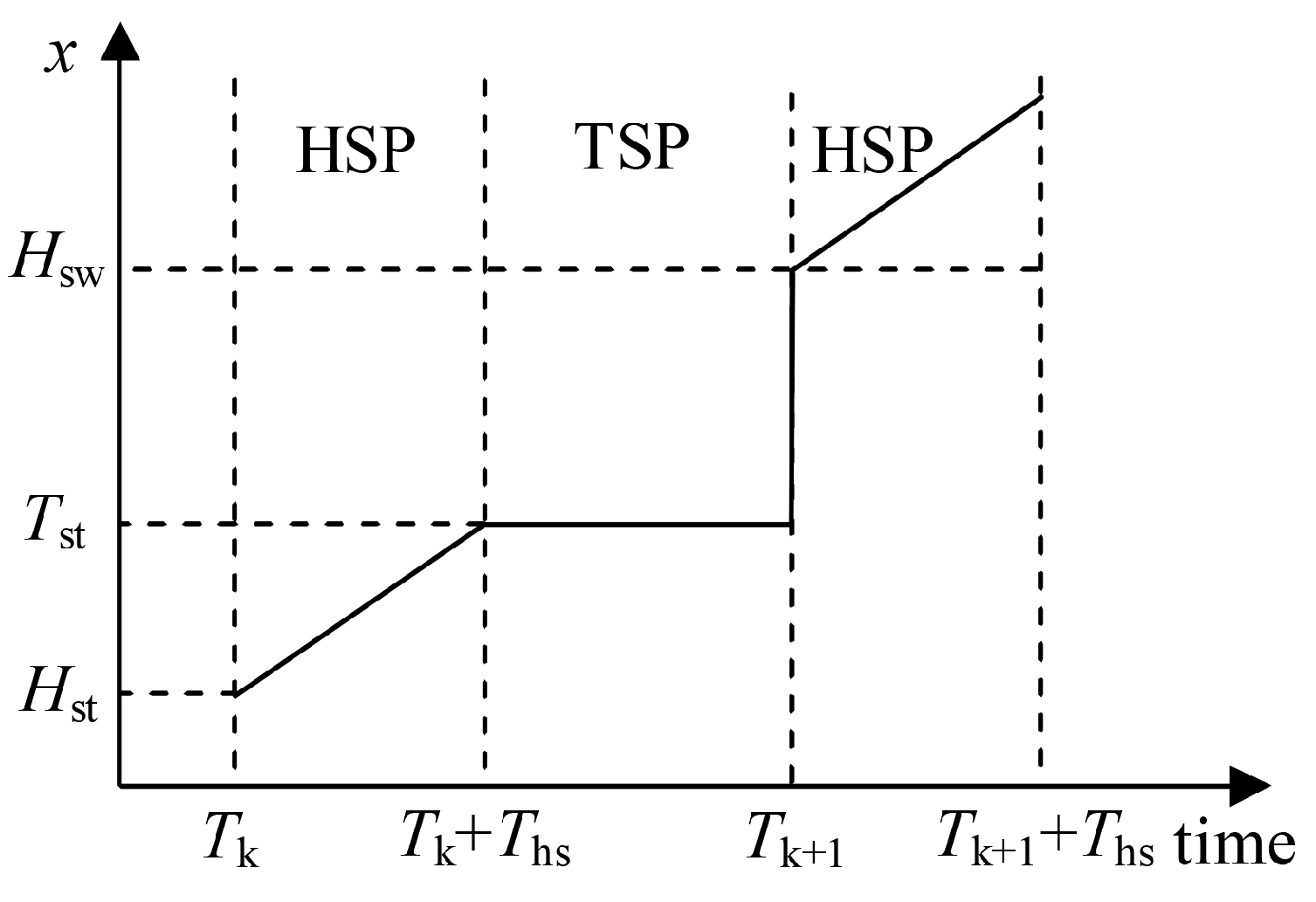
- (1)
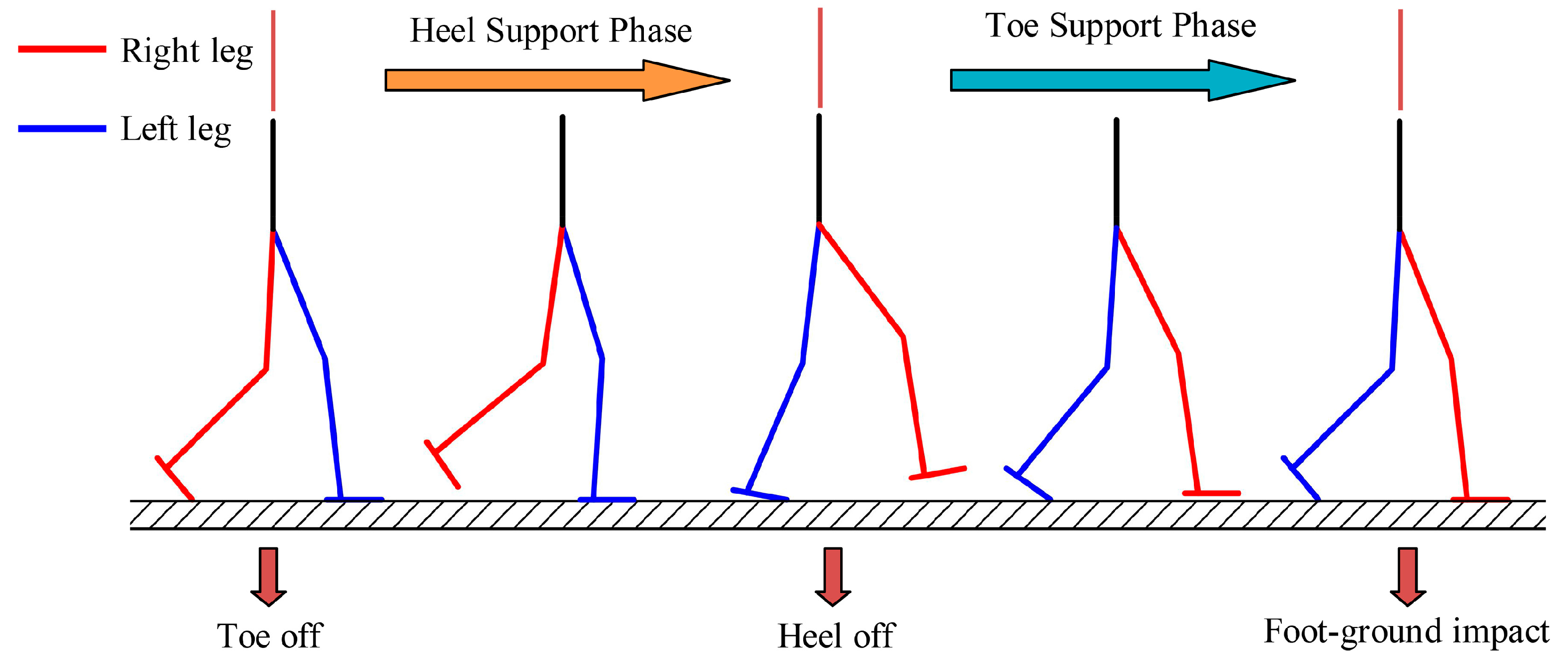
- Heel support phase (HSP). This phase starts when the toe of the swing leg lifts off the ground. The whole foot of the stance leg is assumed to remain flat and motionless on the ground without slipping. At the same time, the swing leg swings in the forward direction. In this phase, the biped robot is fully actuated because it has the same numbers of degrees of freedom (DOF) and actuators.
- (2)
- Toe support phase (TSP). This phase starts when the heel of the stance leg lifts off the ground. In this phase, the stance foot rotates around its toe, which is virtually pivoted to the ground, and the swing leg continues to swing forward. The biped robot is under-actuated because there is no actuation between the stance foot and the ground.
- (3)
- Impact Phase (IP). Leg roles exchange takes place in this phase. After the swing foot strikes the ground, the swing leg becomes the new stance leg, while the original stance leg rises from the ground and becomes the swing leg.
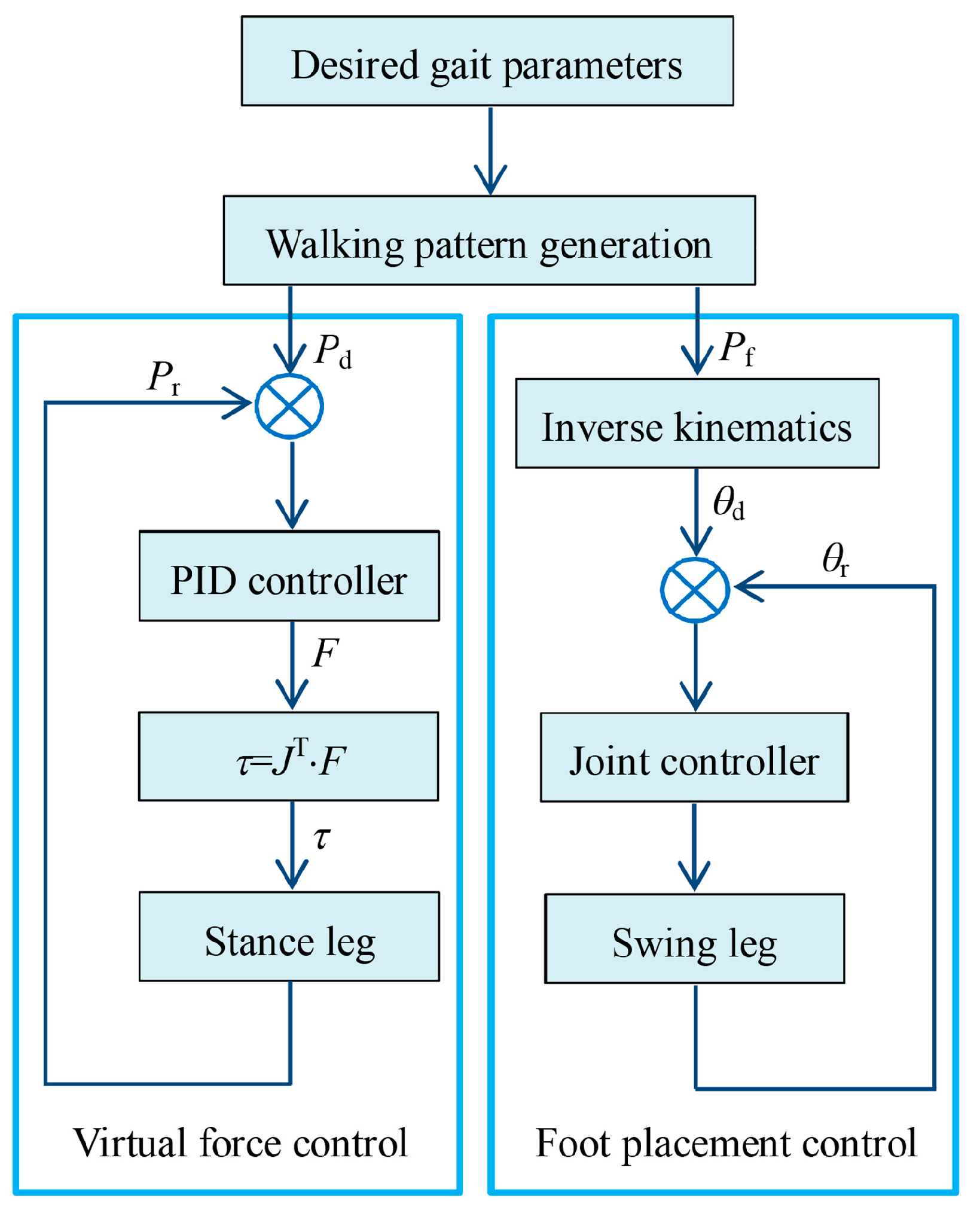
2.4. The Hybrid Control Scheme
3. Results
3.1. Walking Pattern Generation
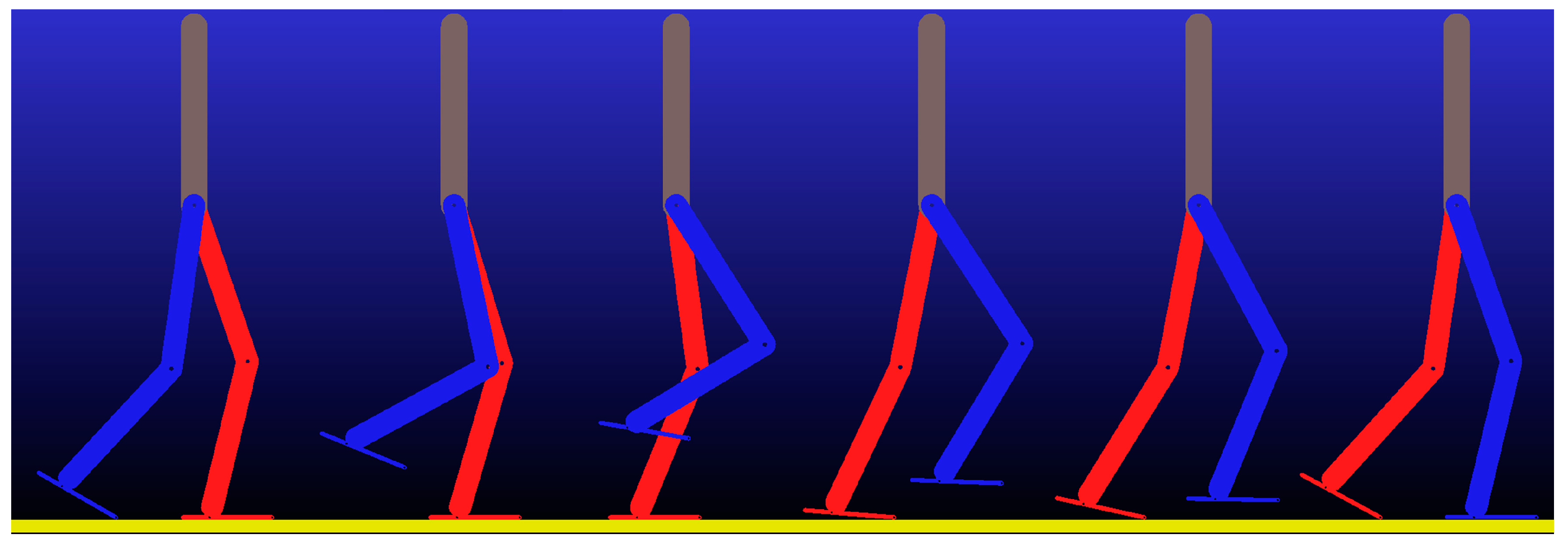
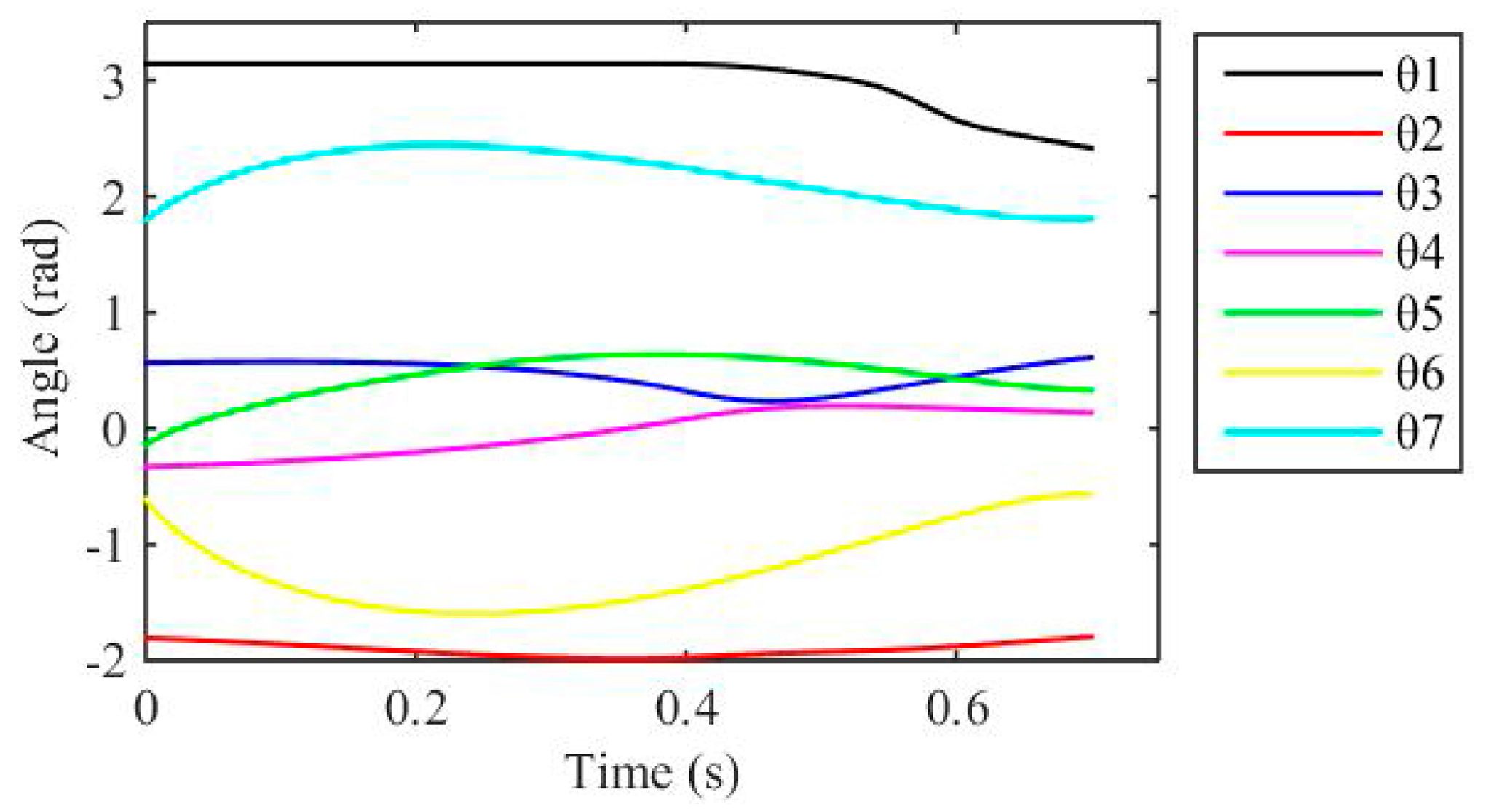
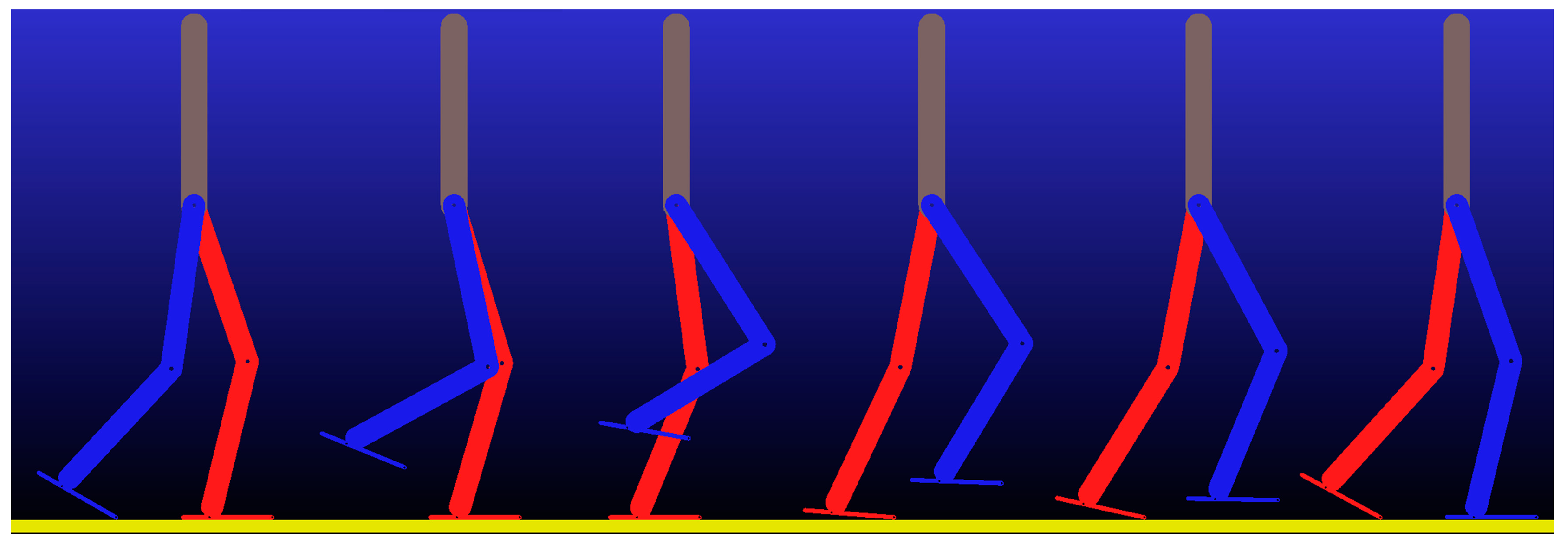
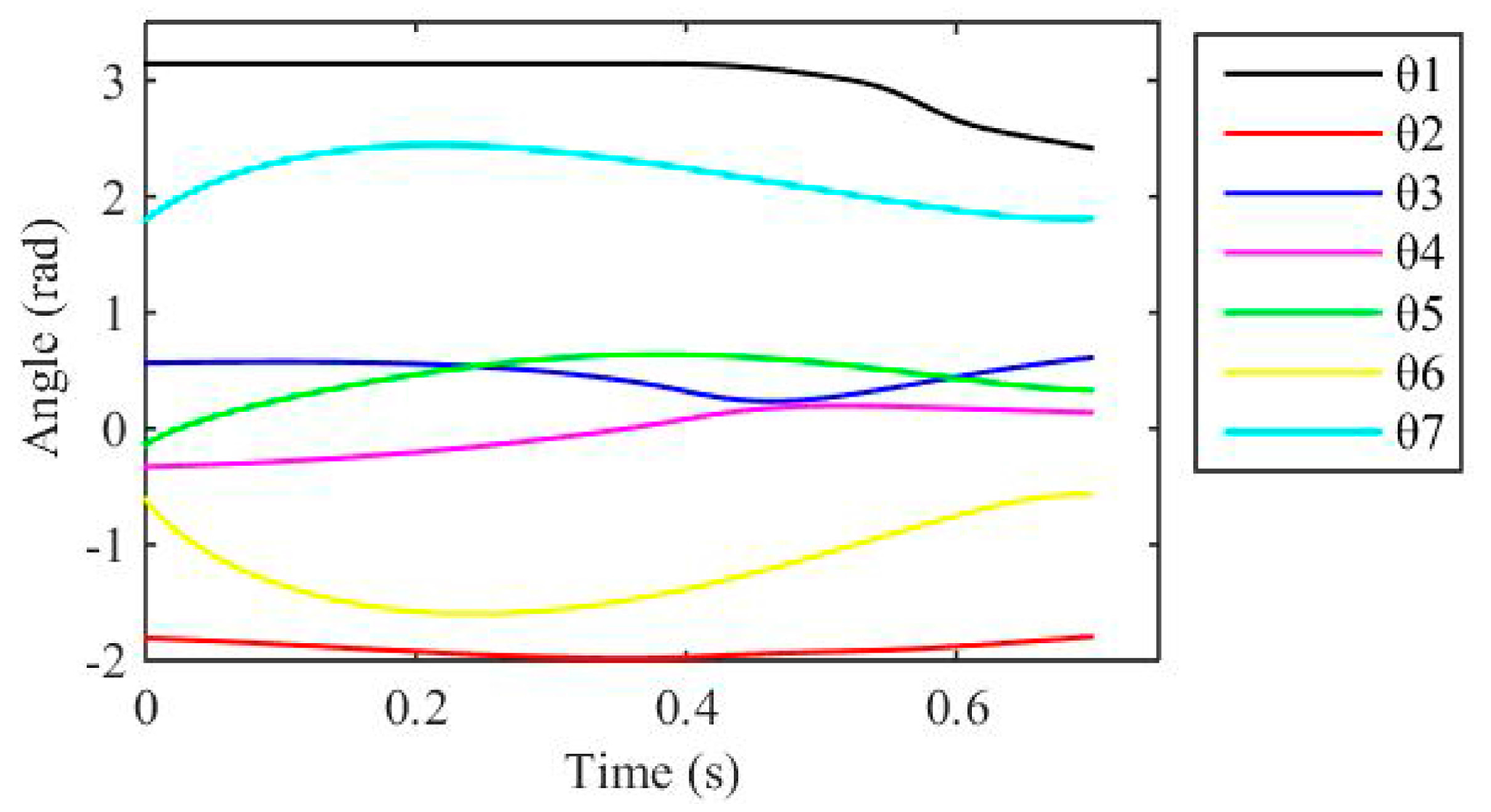
3.2. Simulation
4. Conclusions and Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nugroho, S.; Prihatmanto, A.; Rohman, A. Design and implementation of kinematics model and trajectory planning for NAO humanoid robot in a tic-tac-toe board game. In Proceedings of the 2014 IEEE 4th International Conference on System Engineering and Technology, Bandung, Indonesia, 24–25 November 2014; pp. 1–7. [Google Scholar]
- Ghassemi, P.; Masouleh, M.; Kalhor, A. Push recovery for NAO humanoid robot. Proceeding of the 2nd RSI/ISM International Conference on Robotics and Mechatronics, Tehran, Iran, 15–17 October 2014; pp. 35–40. [Google Scholar]
- Tsagarakis, N.; Metta, G.; Sandini, G.; Vernon, D.; Beira, R.; Becchi, F.; Righetti, L.; Santos-Victor, J.; Ijspeert, A.; Carrozza, M.; et al. iCub: The design and realization of an open humanoid platform for cognitive and neuroscience research. Adv. Robot. 2007, 21, 1151–1175. [Google Scholar] [CrossRef]
- Metta, G.; Natale, L.; Nori, F.; Sandini, G.; Vernon, D.; Fadiga, L.; Hofsten, C.; Rosander, K.; Lopes, M.; Santos-Victor, J.; et al. The iCub humanoid robot: An open-systems platform for research in cognitive development. Neural Netw. 2010, 23, 1125–1134. [Google Scholar] [CrossRef] [PubMed]
- Sakagami, Y.; Watanabe, R.; Aoyama, C.; Matsunaga, S.; Higaki, N.; Fujimura, K. The intelligent asimo: System overview and integration. In Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; pp. 2478–2483. [Google Scholar]
- Kanazawa, M.; Nozawa, S.; Kakiuchi, Y.; Kanemoto, Y.; Kuroda, M.; Okada, K.; Inaba, M.; Yoshiike, T. Robust vertical ladder climbing and transitioning between ladder and catwalk for humanoid robots. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 2202–2209. [Google Scholar]
- Kaneko, K.; Harada, K.; Kanehiro, F.; Miyamori, G.; Akachi, K. Humanoid robot HRP-3. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2471–2478. [Google Scholar]
- Kaneko, K.; Kanehiro, F.; Morisawa, M.; Tsuji, T.; Miura, K.; Nakaoka, S.; Kajita, S.; Yokoi, K. Hardware improvement of cybernetic human HRP-4C for entertainment use. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4392–4399. [Google Scholar]
- Kaneko, K.; Kanehiro, F.; Morisawa, M.; Akachi, K.; Miyamori, G.; Hayashi, A.; Kanehira, N. Humanoid robot HRP-4—Humanoid robotics platform with lightweight and slim body. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4400–4407. [Google Scholar]
- Feng, S.; Xinjilefu, X; Atkeson, C.; Kim, J. Optimization based controller design and implementation for the atlas robot in the DARPA robotics challenge finals. In Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 1028–1035. [Google Scholar]
- Chong, Z.; Hung, R.; Lee, K.; Wang, W.; Ng, T.; Newman, W. Autonomous wall cutting with an Atlas humanoid robot. In Proceedings of the 2015 IEEE International Conference on Technologies for Practical Robot Applications, Woburn, MA, USA, 11–12 May 2015; pp. 1–6. [Google Scholar]
- Vukobratovic, M. Zero-moment point—Thirty-five years of its life. Int. J. Hum. Robot. 2001, 1, 157–173. [Google Scholar] [CrossRef]
- Vukobratović, M.; Borovac, B.; Potkonjak, V. ZMP: A review of some basic misunderstandings. Int. J. Hum. Robot. 2006, 3, 153–175. [Google Scholar] [CrossRef]
- Adamczyk, P.G.; Collins, S.H.; Kuo, A.D. The advantages of a rolling foot in human walking. J. Exp. Biol. 2006, 209, 3953–3963. [Google Scholar] [CrossRef] [PubMed]
- Choi, J.H.; Grizzle, J.W. Planar bipedal walking with foot rotation. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 4909–4916. [Google Scholar]
- Eilenberg, M.F.; Geyer, H.; Herr, H. Control of a powered ankle-foot prosthesis based on a neuromuscular model. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 164–173. [Google Scholar] [CrossRef] [PubMed]
- Tlalolini, D.; Chevallereau, C.; Aoustin, Y. Comparison of different gaits with rotation of the feet for a planar biped. Robot. Auton. Syst. 2009, 57, 371–383. [Google Scholar] [CrossRef]
- Kouchaki, E.; Sadigh, M.J. Effect of toe-joint bending on biped gait performance. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; pp. 697–702. [Google Scholar]
- Mahdokht, E.; Khadiv, M.; Moosavian, S.A.A. Effects of toe-off and heel-off motions on gait performance of biped robots. In Proceedings of the 3rd RSI International Conference on Robotics and Mechatronics, Tehran, Iran, 7–9 October 2015; pp. 007–012. [Google Scholar]
- Tlalolini, D.; Chevallereau, C.; Aoustin, Y. Human-like walking: Optimal motion of a bipedal robot with toe-rotation motion. IEEE/ASME Trans. Mechatron. 2011, 16, 310–320. [Google Scholar] [CrossRef]
- Sellaouti, R.; Stasse, O.; Kajita, S.; Yokoi, K.; Kheddar, A. Faster and smoother walking of humanoid HRP-2 with passive toe joints. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 4909–4914. [Google Scholar]
- Kajita, S.; Kaneko, K.; Morisawa, M.; Nakaoka, S.; Hirukawa, H. ZMP-based biped running enhanced by toe springs. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 3963–3969. [Google Scholar]
- Miura, K.; Morisawa, M.; Kanehiro, F.; Kajita, S.; Kaneko, K.; Yokoi, K. Human-like walking with toe supporting for humanoids. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4428–4435. [Google Scholar]
- Chevallereau, C.; Djoudi, D.; Grizzle, J.W. Stable bipedal walking with foot rotation through direct regulation of the zero moment point. IEEE Trans. Robot. 2008, 24, 390–401. [Google Scholar] [CrossRef]
- Sinnet, R.W.; Powell, M.J.; Shah, R.P.; Ames, A.D. A Human-inspired hybrid control approach to bipedal robotic walking. In Proceedings of the 18th World Congress/The International Federation of Automatic Control, Milano, Italy, 28 August–2 September 2011; pp. 6904–6910. [Google Scholar]
- Zhao, H.; Ma, W.; Zeagler, M.B. Human-inspired multi-contact locomotion with AMBER2. In Proceedings of the 2014 ACM/IEEE International Conference on Cyber-Physical Systems, Berlin, Germany, 14–17 April 2014; pp. 199–210. [Google Scholar]
- Zhao, H.; Hereid, A.; Ma, W.; Ames, A.D. Multi-contact bipedal robotic locomotion. Robotica 2017, 35, 1072–1106. [Google Scholar] [CrossRef]
- Torricelli, D.; Gonzalez, J.; Weckx, M.; Jiménez-Fabián, R.; Vanderborght, B.; Sartori, M.; Dosen, S.; Farina, D.; Lefeber, D.; Pons, J.L. Human-like compliant locomotion: State of the art of robotic implementations. Bioinspir. Biomim. 2016, 11, 051002. [Google Scholar] [CrossRef] [PubMed]
- Ames, A.D.; Vasudevan, R.; Bajcsy, R. Human-data based cost of bipedal robotic walking. In Proceedings of the 14th International Conference on Hybrid Systems: Computation and Control, Vienna, Austria, 12–14 April 2011; pp. 153–162. [Google Scholar]
- Pratt, J.; Dilworth, P.; Pratt, G. Virtual model control of a bipedal walking robot. In Proceedings of the 1997 IEEE International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; pp. 193–198. [Google Scholar]
- Li, Z.; Vanderborght, B.; Tsagarakis, N.G.; Caldwell, D.G. Human-like Walking with straightened knees, toe-off and heel-strike for the humanoid robot iCub. In Proceedings of the 2010 UKACC International Conference on Control, Coventry, UK, 7–10 September 2010. [Google Scholar]
- Chen, X.; Zhou, Y.; Huang, Q.; Yu, Z.; Ma, G.; Meng, L.; Fu, C. Bipedal walking with toe-off, heel-strike and compliance with external disturbances. In Proceedings of the 2014 14th IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 506–511. [Google Scholar]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 1620–1626. [Google Scholar]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Yokoi, K.; Hirukawa, H. The 3D linear inverted pendulum model: A simple modeling for a biped walking pattern generation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; pp. 239–246. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | Length (m) | Mass (kg) |
|---|---|---|
| Torso | 0.4 | 3 |
| Thigh | 0.37 | 1.8 |
| Shank | 0.36 | 1.5 |
| Foot | 0.21 | 0.3 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zang, X.; Heng, S.; Lin, Z.; Zhao, J. Human-Like Walking with Heel Off and Toe Support for Biped Robot. Appl. Sci. 2017, 7, 499. https://doi.org/10.3390/app7050499
Liu Y, Zang X, Heng S, Lin Z, Zhao J. Human-Like Walking with Heel Off and Toe Support for Biped Robot. Applied Sciences. 2017; 7(5):499. https://doi.org/10.3390/app7050499
Chicago/Turabian StyleLiu, Yixiang, Xizhe Zang, Shuai Heng, Zhenkun Lin, and Jie Zhao. 2017. "Human-Like Walking with Heel Off and Toe Support for Biped Robot" Applied Sciences 7, no. 5: 499. https://doi.org/10.3390/app7050499
APA StyleLiu, Y., Zang, X., Heng, S., Lin, Z., & Zhao, J. (2017). Human-Like Walking with Heel Off and Toe Support for Biped Robot. Applied Sciences, 7(5), 499. https://doi.org/10.3390/app7050499