1. Introduction
A parallel robot actually is a machine with a closed kinematic structure having more than 1 degree of freedom, and has therefore been used in a wide variety of applications due to its many advantages such as high stiffness, low inertia, precise positioning capability, and large force/torque capacity over their serial counterparts.
Recently, in the demand for flexibility, rapid changeover, or a specific task within the operational constraints, the reconfigurability of the parallel robot has proved to be important. Moreover, a parallel robot possessing an adjustable architecture can achieve a relatively larger workspace, and avoid singularities and interference among the system components along a prescribed trajectory. For now, two main approaches have been proposed for the reconfiguration of the parallel robot, one is based on a modular design, and the other is via a variable geometry methodology [
1]. A modular reconfigurable parallel robot can be made through the integration of a set of adjustable joint modules and link modules, such that the parallel robot can generate various configurations by changing the number and types of the modules [
2]. For example, Xi
et al. [
3] presented a reconfigurable parallel robot constructed by two base tripods, in which the first tripod is fixed to the moving platform, and branches of the second tripod are designed to be detachable from the moving platform such that this parallel robot can be reconfigured from six DOFs to three, four or five DOFs, respectively. Ji and Song [
4] designed a reconfigurable 6-DOF Gough-Stewart platform whose reconfiguration is achieved through a modular design, such that any of the leg modules can be replaced by another with a different range of motion, and can be placed on the mobile platform as well as the base at any desired location and orientation. Even when these modules are assembled, the topologies of a parallel robot can be further changed for a task-specific architecture, thus its adaptability for changes can be maximized.
The variable geometry methodology is based on the rearrangement of the leg attachments on the base or on the moving platform so that the parallel robot geometry can be modified to adapt it to particular tasks. Borras
et al. [
5] presented a 5-SPU platform whose base leg attachments can be easily reconfigured, statically or dynamically, without altering its singularity locus. Kumar
et al. [
6] made an effort to characterize the parameters for developing a reconfigurable Stewart platform for a contour generation through the variable geometry approach. The trajectory with maximum stiffness for complex contours was then obtained by the generic approach along with the stiffness model. Research also showed that the placements of the legs and the moving ranges of the respective legs have a great effect on the shape and size of the workspace, accommodation of different task requirements, or even improving the stiffness of the parallel robots [
4,
7].
Although there are many designs to date for reconfigurable robots, most of these proposed systems are lower mobility mechanisms, i.e., three to five DOFs. As a result, it is not sufficiently flexible and reconfigurable for a manufacturing facility. In this paper, a six DOF Stewart-platform robot with sliding lockable base joints is proposed. The advantages of designing such a manipulator allow for added reconfiguration so that the mechanical properties can be changed passively and will improve its various applications. However, multiple configurations of a reconfigurable parallel robot also increase the difficulty of determining the optimum task-based geometry.
The current state-of-the-art as related to the research of the proposed Stewart-platform robot with sliding lockable base joints can be found in [
6,
8,
9,
10,
11]. In [
10], Coppola
et al. conducted a multi-objective optimization procedure with weighted stiffness, dexterity and workspace volume as the performance indices to determine the geometric dimensions of a reconfigurable hybrid parallel robot dubbed ReSl-Bot. Therefore, the robot can perform as needed for the task at hand. Finistauri and Xi [
11] presents a new method for the combined topological and geometric reconfiguration of a six DOF parallel robot to achieve task-based reconfiguration. Essentially, these reconfigurable parallel robots that vary their architecture to obtain different kinematic properties only consider the kinematics of a parallel robot. It is assured that taking into account the dynamics of a parallel robot for task-based reconfiguration has real application. Especially, to consider the maximum dynamic wrench capability along a specified trajectory and promptly varying the manipulator geometry in an optimal way is practically more useful.
In this paper, the architecture of the proposed Stewart-platform robot with sliding lockable base joints is determined based on the maximum allowable dynamic wrench capability. The dynamic wrench capability of a manipulator along a predefined trajectory is defined as the load which can be applied or sustained by a particular manipulator as the manipulator executes a specified task with the specified precision. Accordingly, the remainder of this paper regarding an optimal task-based reconfiguration study with the maximum dynamic wrench capability is structured as follows: in
Section 2, taking into account external dynamic wrenches (applied force and/or moments), the governing equations for a six-DOF Stewart-platform robot with sliding lockable base joints are presented. In
Section 3, the determination of the maximal dynamic wrench capability with respect to the locations of the links on the base is cast into the optimization problem, and then a hierarchical optimization process is proposed for the problem. Simulation results are presented and discussed in
Section 4. Finally,
Section 5 outlines a brief conclusion about this study.
2. Dynamics of the Stewart-Platform Robot with Sliding Lockable Base Joints
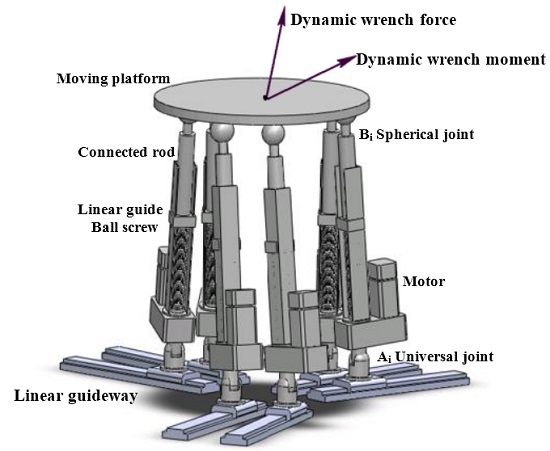
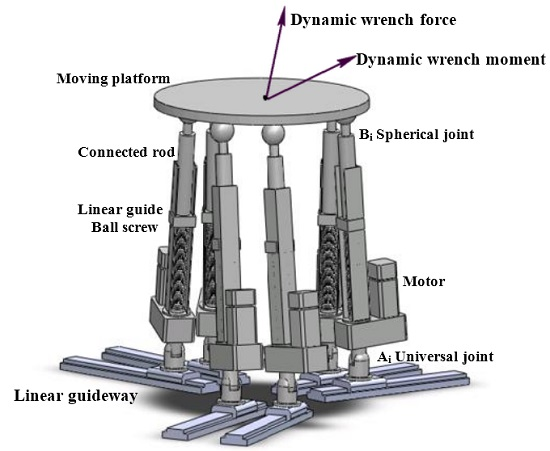
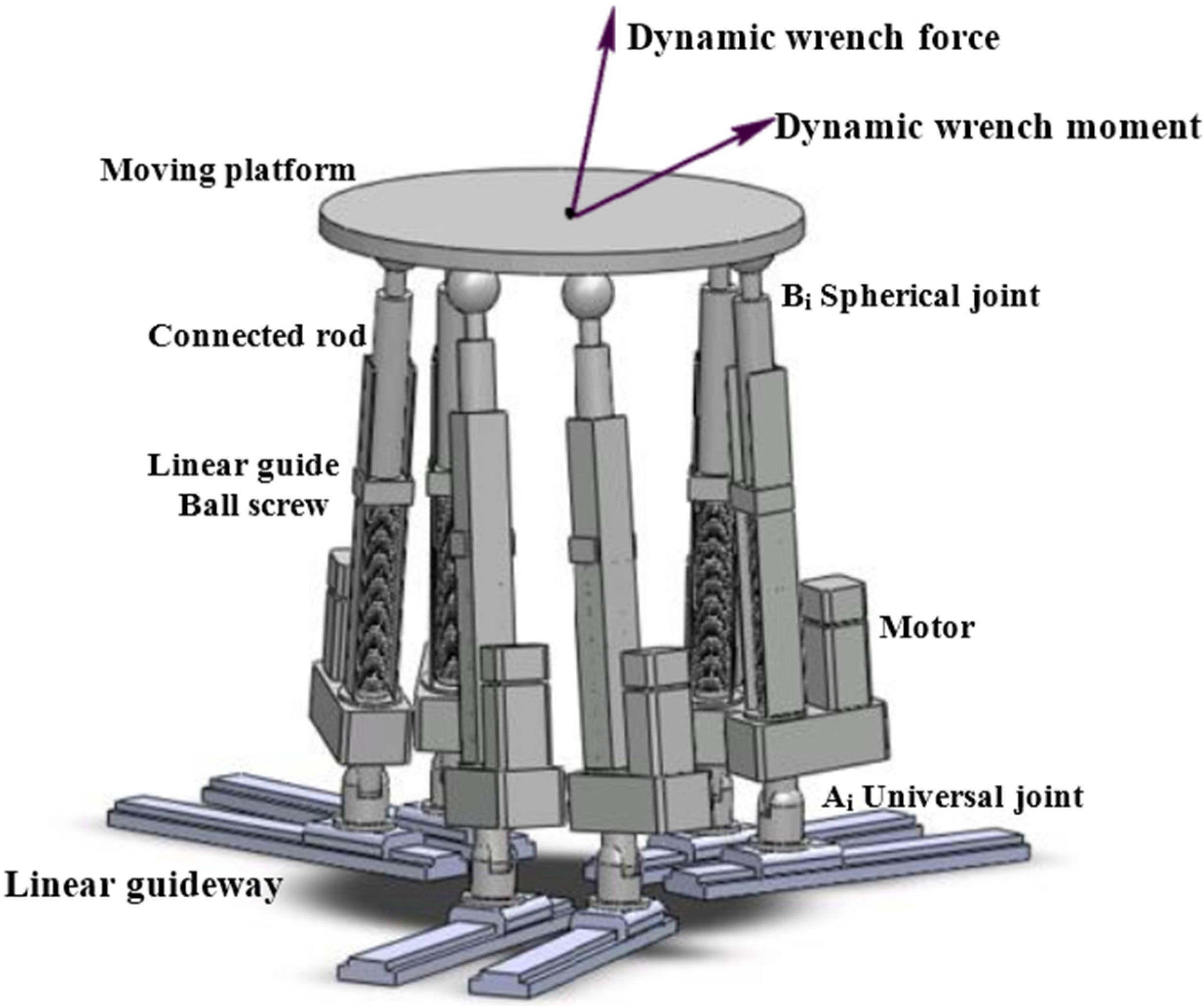
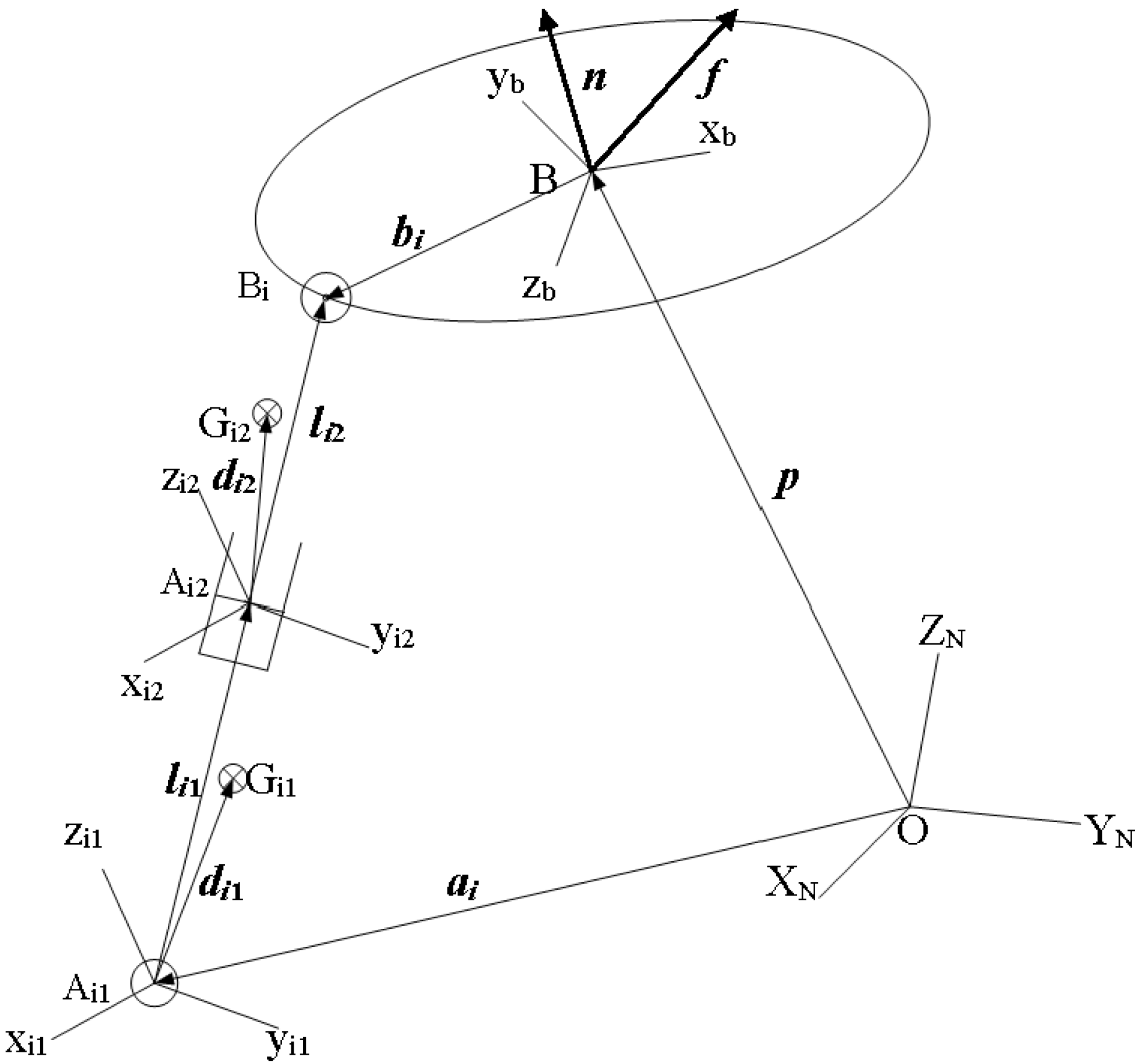
The geometric structure of the proposed Stewart-platform robot with sliding lockable base joints is illustrated in
Figure 1, in which a base and a moving platform type of end-effector are connected to the base points through six extensible links
i (
i = 1, …, 6) with a spherical joint B
i at their upper end and a universal joint
at their lower end. Each link is driven by a motor through a transmission comprising a ball screw system and a connected rod. Both ends of the connected rod are respectively attached to a linear guide installed on the ball screw and to the moving platform. Accordingly, each link in the parallel robot structure can be seen with two parts,
i.e., a lower extensible part (designated hereafter as segment (1) comprising the ball screw system, and an upper fixed-length part (designated hereafter as segment (2) consisting of the linear guide and connected rod. When the ball screws are driven by the motors, the connected rods move in a direction along the corresponding link axes such that the positions and orientations of the platform type of end-effector can vary according to a desired task planning. Moreover, in order to optimally adjust the architecture geometry for the required performance, each universal joint
,
i.e., the base point, can be displaced along the linear guideway of the base. In addition, the applied dynamic wrench force
f and wrench moment
n are also introduced to the center of mass of the moving platform for the maximum dynamic wrench capability analysis of the reconfigurable parallel robot. Therefore, by displacing the base locations of each link along a linear guideway, the proposed reconfigurable parallel robot is capable of varying its geometry to fulfill a specified task with the maximum dynamic wrench capability.
In studying the optimal architecture of a reconfigurable parallel robot for maximum dynamic wrench capability, an appropriate inverse dynamics form is required. In comparing with other formatting algorithms for the dynamic equations of parallel robots, several methods such as the Newton-Euler formulation [
12,
13,
14], virtual work principle [
15,
16], Kane’s method [
17], kinematic influence coefficient theory [
18], screw theory [
19], and the Lagrangian formulation in generalized coordinates [
20,
21,
22] are proposed to model and simulate the dynamics of parallel manipulators. However, these expressions are not structured enough, and are not appropriate for the dynamic wrench capability analysis. Therefore, following our previous development, the Boltzmann-Hamel-d’Alembert formula will be used to develop the required dynamics.
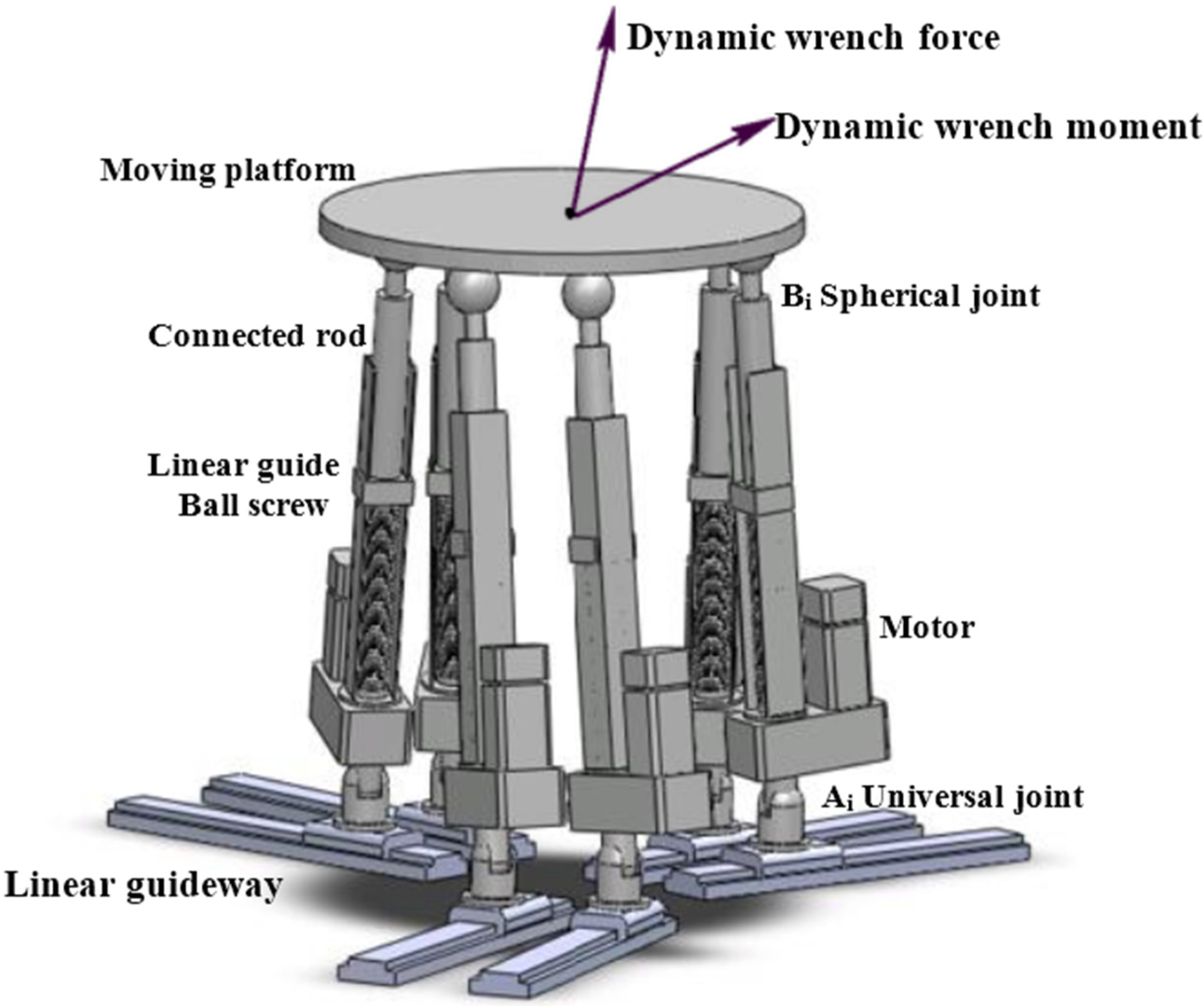
As shown in
Figure 2, the associated frames are first assigned in developing the dynamics of the parallel robot for the dynamic wrench capability analysis. Here, an inertial coordinate system
N-frame,
, is fixed to the base and a second coordinate system
B-frame,
, is attached to the moving platform with its origin located at the platform’s center of mass, B, whose position vector with respect to the
N-frame is denoted as
p. Moreover, two parallel local coordinate systems,
i.e.,
i1-frame and
i2-frame with the corresponding origins A
i1 and A
i2, are attached to the segment 1 and segment 2 of the link
i, respectively, and the position vector of A
i1 with respect to the
N-frame is represented as
ai. The position vector of the ball joint B
i with respect to the
B-frame is defined as
bi, and the length vector of link
i from the universal joint A
i1 to the ball joint B
i with respect to the
i1-frame is expressed as
. Because the length vector of each link is an addition of the variable length vector
of the lower segment to the constant length vector
of the upper segment, the length vector of link
i can be written as
where
is an unit vector along the
ith link axis and is expressed in the i
1-frame;
li,
li1 and
li2 are the respective length magnitudes of link
i, as well as the lower segment and the upper segment of link
i.
Because in the parallel robot structure there exist multiple closed-loop chain mechanisms, the geometric constraint equation based on a vector loop relationship can be formulated as
In Equation (2), the rotation matrix
with subscripts
represents the transformation from a local
L-frame to the inertial
N-frame. The time derivative of this rotation matrix can be expressed as
in which
is a skew symmetric matrix formed from the angular velocity
with respect to a local body-fixed
L-frame,
i.e.,
Moreover, the angular velocity
can be related to the time derivative of the Euler angles using a corresponding velocity transformation matrix
such that
Taking a derivative on the constraint Equation (2), and using the fact that no spin is allowed about its link axis due to the connection of each link to the base by an universal joint,
i.e.,
Thus, the sliding velocity and the angular velocity of link
i with respect to the
i1-frame can be obtained as
where
implies that the sliding velocity of each link is equivalent to the relative sliding velocity between the two segments of the link. Furthermore, the corresponding sliding acceleration and angular acceleration of link
i can be obtained by differentiating the Equations (7) and (8) as
From Equations (7) and (8), the linear velocities of the links to the linear and angular velocities of the moving platform can be related by the following Jacobian matrix as
where
In addition, each link is driven by a motor through a ball-screw transmission mechanism, so the effect of the ball-screw mechanisms on the dynamics is also included in accordance with
where the sliding velocity of the link
i is related to the angular velocity
of the corresponding motor by means of the pitch (
i.e., the advanced distance per revolution)
of the
ith ball screw.
Combining Equations (7) and (8), we can express, then expand these constraint equations in a velocity form as
where
is composed of the corresponding velocities of the moving platform and the six links, and
=
with
is a
unit matrix.
From Equation (14),
can be parameterized by
as
and then by differentiating Equation (16), the parameterized acceleration is
On the basis of the developed structured Boltzmann-Hamel-d’Alembert formulism for a parallel mechanism [
23,
24,
25], the dynamics of the PR can be given as
in which
are the velocities of the moving platform,
are the sliding velocities and the angular velocities of the six links. Moreover, the matrices and vectors in Equation (18) are fully derived and explained in the Appendix. Also, it is noted that the applied dynamic wrench force
f and wrench moment
n are expressed in terms of the moving platform-fixed
B-frame.
Equation (18) can be further simplified using the kinematic relationships Equations (16) and (17) to eliminate
and
so that the following equations of motion are yielded:
where
,
,
,
.
Because the expressions for the rotations of the moving platform are in terms of the quasi-velocities and the corresponding derivatives, a velocity transformation matrix relating quasi-velocities to the time derivative of angular orientation coordinates is required for further describing the orientations of the moving platform in space. The velocity transformation is defined as
in which
, and
, generally defined by a set of Euler angles, specifies the orientations of the moving platform. Also, the velocity transformation matrix
is defined as
where
is for the angular velocity transformation of the moving platform.
Moreover, the applied wrenches can be expressed as
where
fw and
nw are the magnitudes of the dynamic wrench force and wrench moment; α and β are the angles of the applied wrenches with respect to the
B-frame, and the subscripts
f and
n in Equation (22) respectively refer to the dynamic wrench force and wrench moment.
For the problem of the dynamic wrench capability, we wish to find the allowable maximum dynamic wrench of the reconfigurable parallel robot along a specified trajectory without the violation of constraints. Accordingly, the objective function is dynamic wrench capability that comprises the dynamic wrench force and wrench moment. Substituting Equation (20) together with its time derivative and Equation (22) into the equations of motion, Equation (19), gives rise to an inverse dynamics equation in true coordinates (
p,
):
where
,
,
, or more compactly,
in which
include the input torques
, and the dynamic wrench magnitudes
Qw = [
fw nw]
T. It is seen that the proposed approach to the development of the governing dynamic model for the dynamic wrench capability analysis generates a structured linear parameter matrix-vector form with respect to the input torques and the magnitudes of the dynamic wrench force and wrench moment.
3. Reconfiguration for the Maximum Allowable DWC
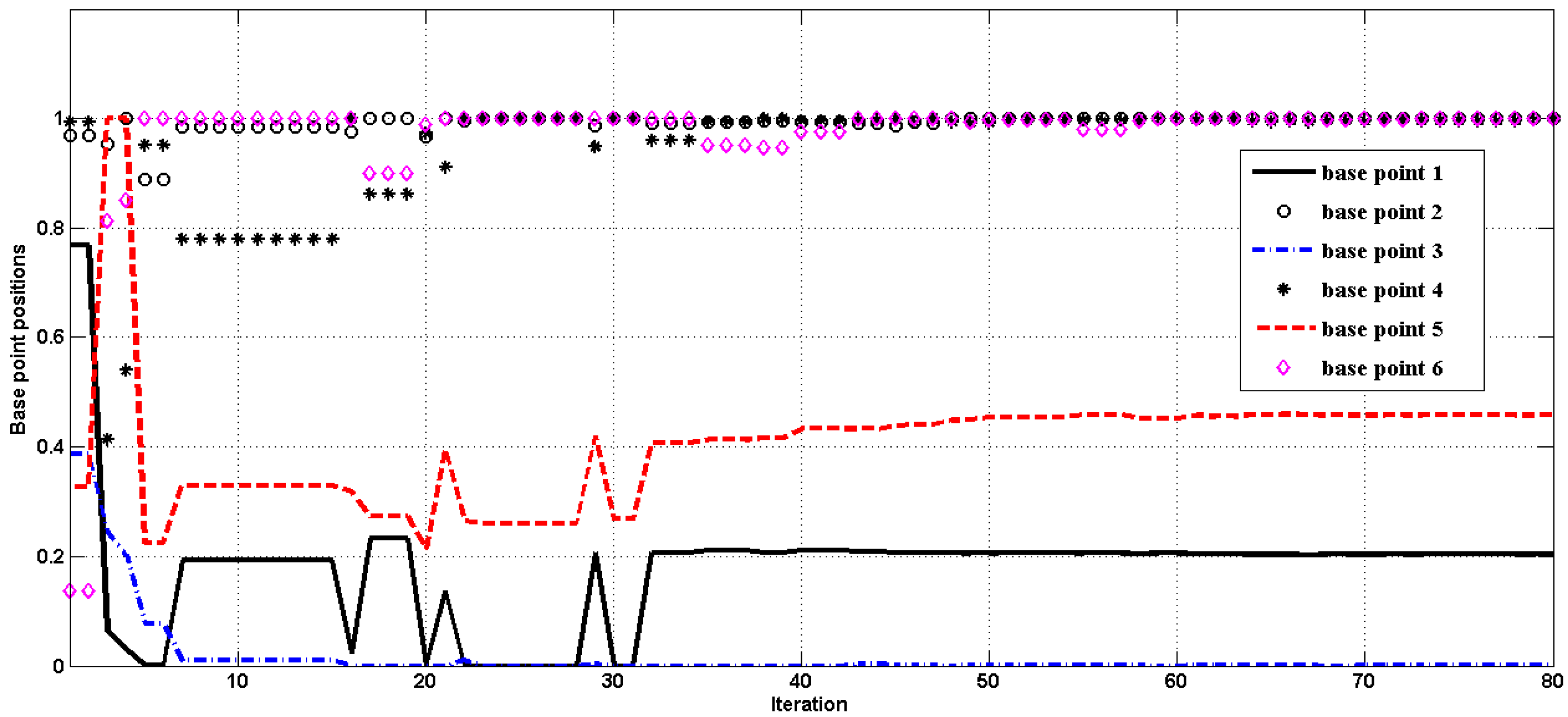
In the determination of the maximum allowable dynamic wrench capability while driving the adjustable parallel robot along a specified trajectory, the aim is to find the maximum possible magnitudes of the dynamic wrenches as well as the optimal link attachments of the parallel robot via a reconfiguration. In other words, the position vectors ai of the universal joints Ai1 for the link i are defined as the undetermined design variables. In general, the optimized geometry (i.e., the position vectors ai) depends strongly upon the form of the cost function, the given trajectories, the applied wrench directions with respect to the moving platform and the associated constraints. Accordingly, an appropriate algorithm for optimizing the geometry considering the maximum allowable dynamic wrench capability is developed in this section.
3.1. Wrench Capability Formulation for a Predefined Trajectory
To maximize the dynamic wrenches, a linear weighting combination of the dynamic wrench force and wrench moment is defined as the cost function
or equivalently to minimize the following fitness
in which the user-defined weighting coefficients
and
are used to weight the relative importance of the considered applied dynamic wrench force and dynamic wrench moment.
In order to ensure the practical feasibility of the adjustable parallel robot, the reconfiguration must take account of the physical constraints and design specifications imposed by the parallel robot structure as well as the actuator mechanism on the motion of the manipulator. Broadly speaking, the following inequalities are required to model these constraints:
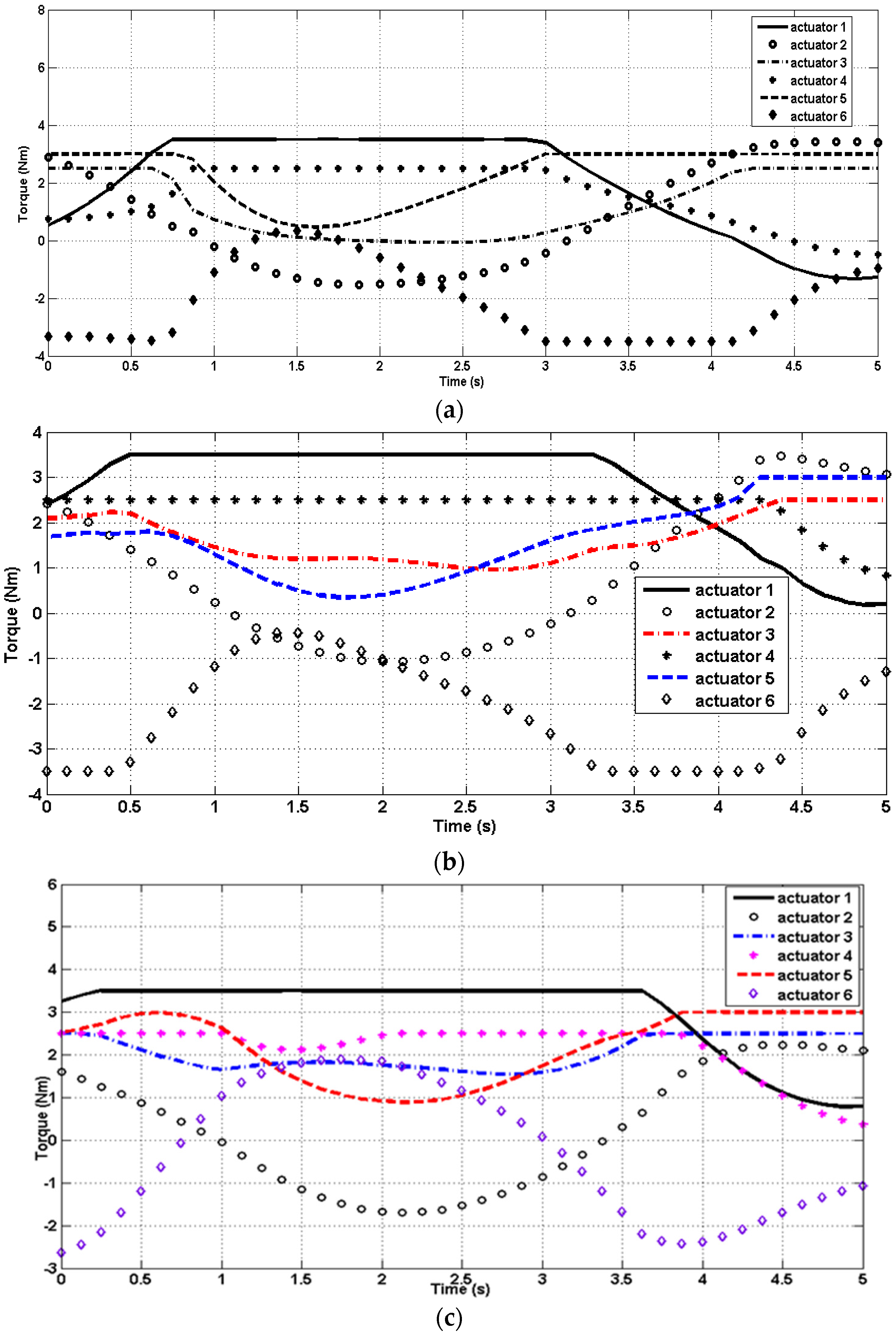
Each motor
i has a designed maximum output torque value
. Accordingly, the motor torque
τi is constrained as
In addition, due to the specified moving range of the base points A
i, the distance from the origin of the
N-frame must be confined to
In the current study, the aim of this optimization problem is to determine the optimal configuration along the given task trajectory considering the maximum allowable dynamic wrench capability. The allowable dynamic wrench capability is defined as the following: firstly, by discretizing the task trajectory under a presumed configuration ai, the dynamic wrench force and wrench moment at each spaced point are obtained by minimizing the fitness function given in Equation (26) subject to the equality constraint Equation (22) and the inequality constraints formulated in Equations (27) and (28). Then, the minimal dynamic wrench force and wrench moment are searched along the trajectory and then substituted into the Equation (25) so that the cost function value is defined as the allowable dynamic wrench capability for the task-dependent trajectory.
Conventionally, a discretizing and searching method is applied to this constrained optimization problem by dividing each ai (i = 1, …, 6) into n discrete points between , and then for the specified trajectory, the corresponding allowable dynamic wrench capability for all the n6 configurations of the parallel robot can be determined by the constrained optimization method. Accordingly, the reconfiguration with the maximum allowable dynamic wrench capability can be made by comparing the n6 solutions. However, it is very time-consuming and arduous for a large n. Instead, a hierarchical optimization process is proposed in this paper.
3.2. Solution Procedure by a Hierarchical Optimization Process
In order to determine the position vectors ai which maximize the allowable dynamic wrench capability of the associated motion, a hierarchical optimization process combining two optimization algorithms is proposed. As aforementioned, firstly for the initial presumed position vectors ai (i = 1, …, 6) of the base points and at each discretizing point of the designated trajectory, the fitness function, Equation (26), is minimized under the constraint equations. Thus, the generated optimization process can be realized as a typical linear programming such that the Simplex-type linear programming method can be directly applied to determine the maximal dynamic wrench capability at each discrete point of the given trajectory. Next, from the obtained values, the minimum dynamic wrench force and moment are chosen as the allowable wrenches, and then the allowable dynamic wrench capability for this task trajectory is evaluated by substituting the minimum dynamic wrenches into the cost function, Equation (25).
Afterwards, the position vectors
ai of the base points A
i are varied to maximize the allowable dynamic wrench capability. For this optimization process, a population-based optimization technique, differential evolution, is employed. The differential evolution method simulates a natural evolution with a stochastic direct search mechanism according to the distribution of solutions in the current population [
26,
27]. As the algorithm proceeds, all the chromosomes of the next generation are as good as or better than their counterparts in the current generation, and then the individual chromosomes gradually converge toward an optimal solution. Once the termination criteria have been attained (e.g., a specified number of iterations have been performed or the fitness error satisfies the minimum error requirement, for example), the algorithm terminates, and the current optimal chromosome is taken as the global optimal solution of the problem of interest. Due to a low computational complexity, differential evolution outperforms many other optimization methods in terms of convergence speed and robustness for some benchmark functions. Furthermore, differential evolution has very few control parameters to adjust and has therefore been applied to many diverse fields [
28,
29,
30].
Based on the optimization procedures in the hierarchical optimization process, the differential evolution is a higher-level optimization solver for varying the position vectors of the base points, and the Simplex-type linear programming is designated as the lower-level optimization solver for the determination of the dynamic wrench capability. The procedures for the optimal geometry adjustment for a given trajectory can be described as follows:
- (1)
The higher-level optimization process is randomly initialized with P parent individuals according to a uniform probability distribution in the D dimensional problem space. Each parent individual is a set of undetermined position vectors of the base points, namely [ ,…, , p = 1, …, P, and refers to a candidate solution in a D-dimensional space based on the differential evolution algorithm for the optimization problem. Also, these candidate solutions must respect the constraint Equation (28).
- (2)
In the lower-level optimization process, for each individual p = 1, …, P, compute and record and , , for N discrete equally spaced points of the given trajectory by solving the linear programming problem for the minimization of the fitness function, Equation (26) with the equality and inequality constraints Equations (24) and (27).
- (3)
Find the minimum dynamic wrench force and wrench moment for the individual p along the task trajectory by and .
- (4)
In the ith generation of the differential evolution solution procedure, the allowable dynamic wrench capability = in Equation (25) is evaluated using the minimum dynamic wrench force, and dynamic wrench moment, of each individual from the step (3).
- (5)
Generate mutant individuals by adding a randomly selected individual to the difference of two other randomly selected individuals in the parent population according to the following equation:
where
p = 1,2, …,
P is the individual’s index of population;
i is the generation;
represents the
pth mutant vector via the mutation operation;
r1,
r2 and
r3 are mutually different indices and also different from the running index,
p, randomly selected with uniform distribution from the set {1, 2, …,
p − 1,
p + 1, …,
P}; and
fm > 0 is a mutation factor usually taken from the range [0.1, 1], and used to control the amplification of the difference between two parent individuals so as to avoid search stagnation.
- (6)
For the components of each mutant vector, an index
Rand(
p)
{1, 2, …,
D} is randomly chosen using uniform distribution, and the crossover is employed to create a trial vector
by recombining parent and mutant vectors as the followings:
where
j = 1,2, …,
D is the component index in
D-dimensional individual, and
rand(
j) is the
jth evaluation of a uniform random number generation with [0, 1], and
CR is a crossover or recombination rate in the range [0, 1].
- (7)
Repeat the steps (2)–(4) to calculate the allowable dynamic wrench capability in
G using the trial vectors
,
p = 1, …,
P, and then the cost function value of each trial vector
is compared with that of its parent target vector
. This selection procedure is to decide if the trial vector
becomes a member of the population of the next generation. Thus,
In this case, if the allowable dynamic wrench capability in
G of the target parent vector
is larger than that of the trial vector, the target is allowed to advance to the next generation. Otherwise, the trial vector replaces the target vector to become a better offspring in the next generation.
- (8)
Repeat the steps beginning from step (2) until it has reached a stopping criterion in accordance with the user-defined conditions, usually a maximum generation number is set for the stop criterion. Thus, is the best individual vector for the optimal configuration with the best objective function value in this population.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}