
Research on the Stability of UAV Attitude Under Hybrid Control Integrating Active Disturbance Rejection Control and Super-Twisting Sliding Mode Control

Abstract
1. Introduction
2. Materials and Methods
2.1. Translational Dynamics Model
2.2. Attitude Dynamics Model
2.3. Design of ADRC and ST-SMC Hybrid Control
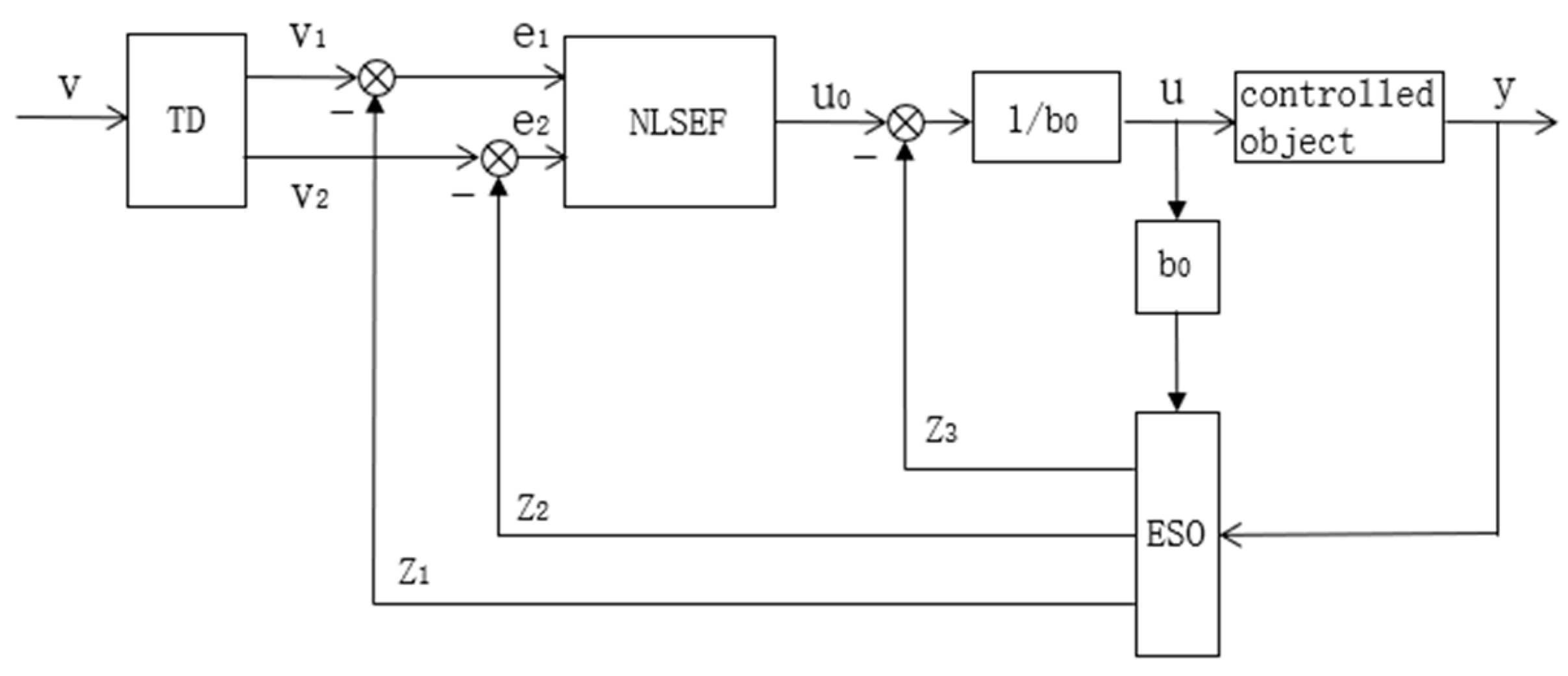
2.3.1. Active Disturbance Rejection Control
- 1.
- Tracking Differentiator (TD)
- 2.
- Extended State Observer (ESO)
- 3.
- Nonlinear State Error Feedback Control (NLSEF)
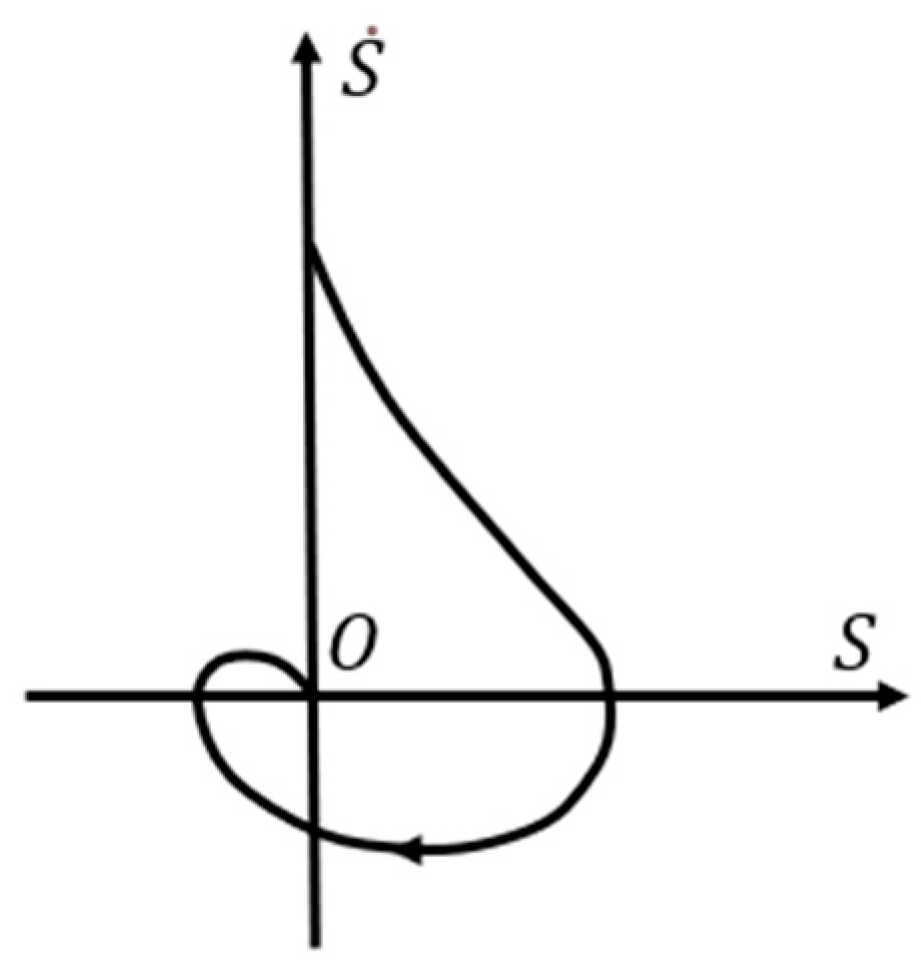
2.3.2. ST-SMC Theory
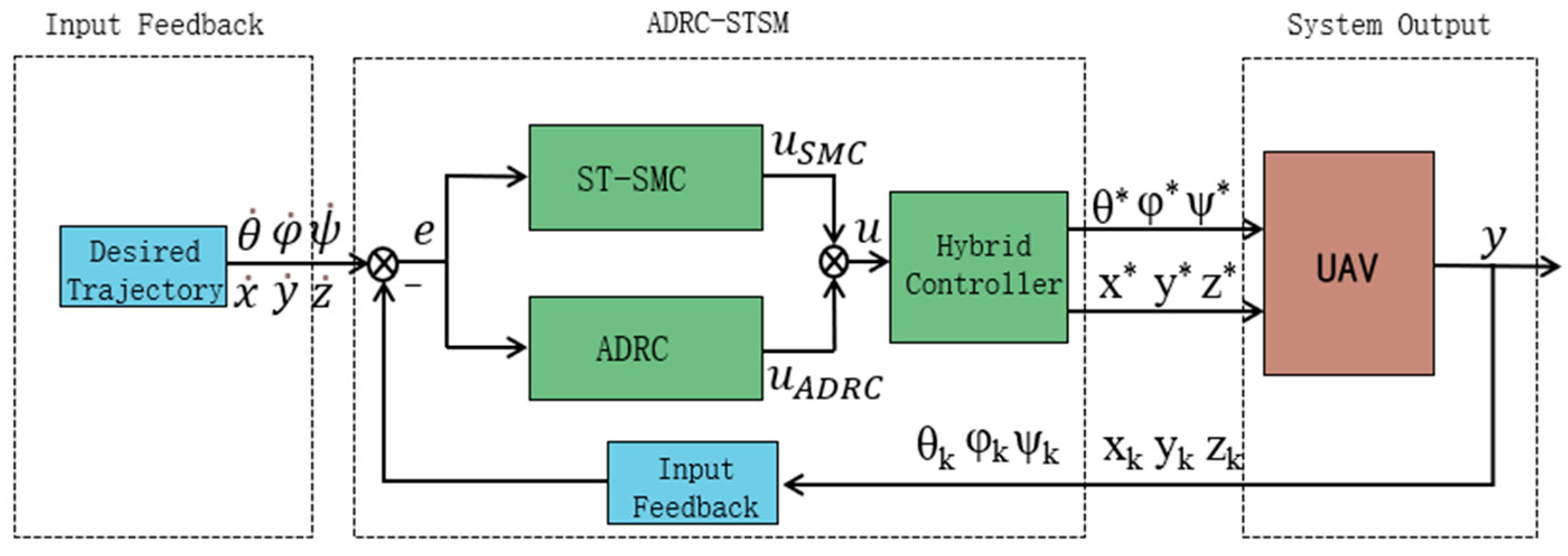
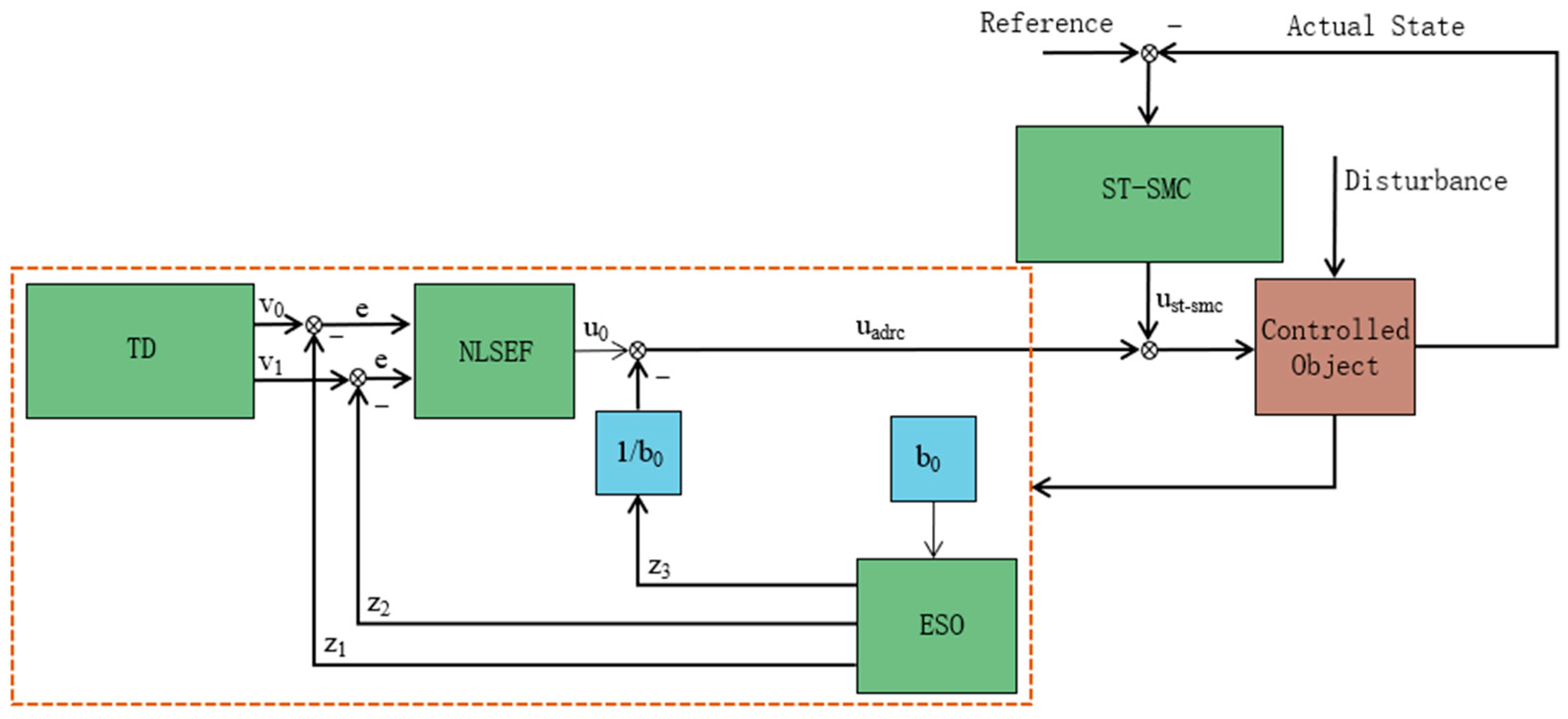
2.3.3. ADRC and ST-SMC Hybrid Control
- ADRC Design
- (1)
- Extended State Observer (ESO)
- (2)
- Control Law Design
- (3)
- Error Feedback Gain Design
- ST-SMC Design
- (1)
- Sliding Surface Design
- (2)
- ST-SMC Law
- Design of ADRC and ST-SMC Hybrid Control
- Lyapunov stability proof
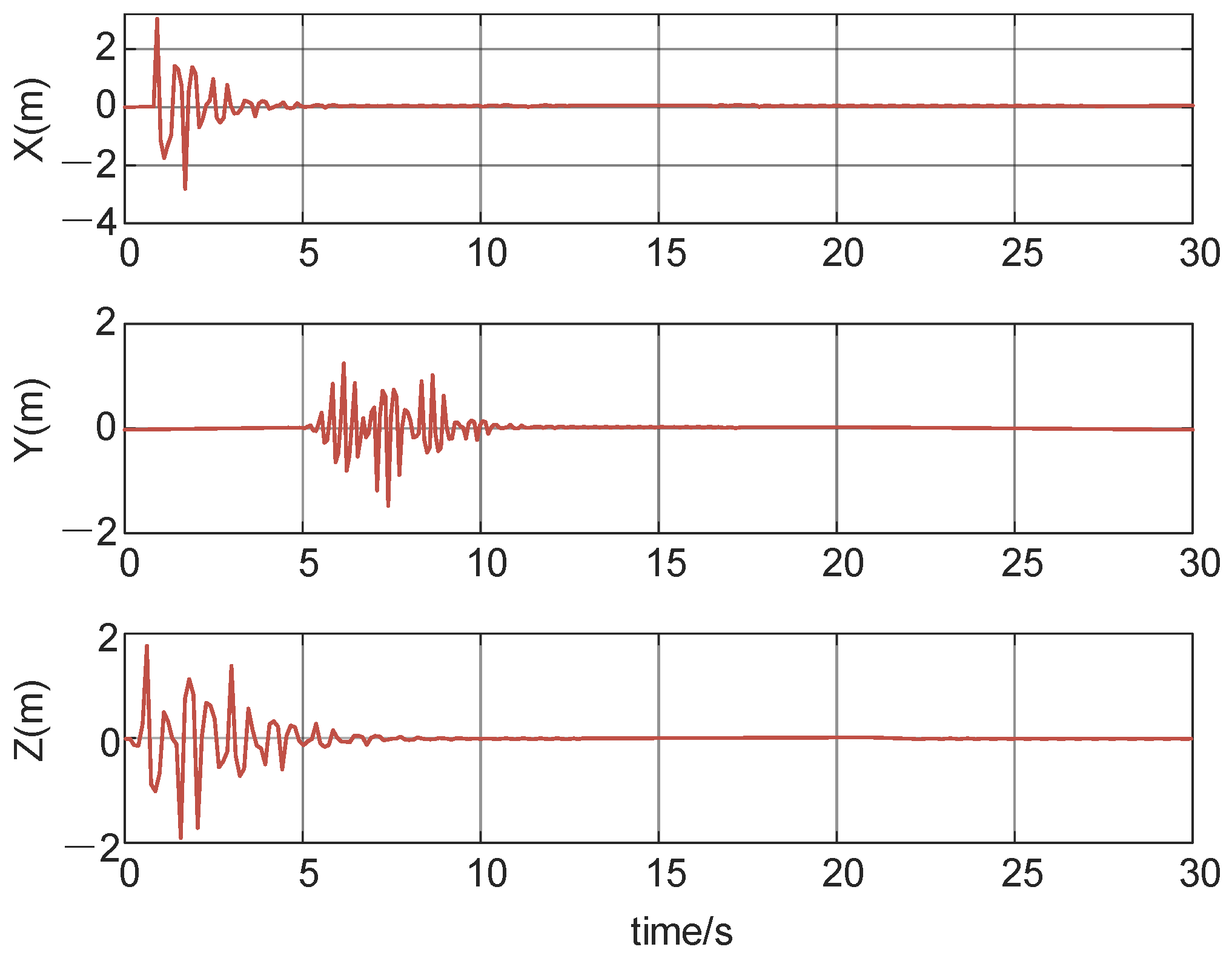
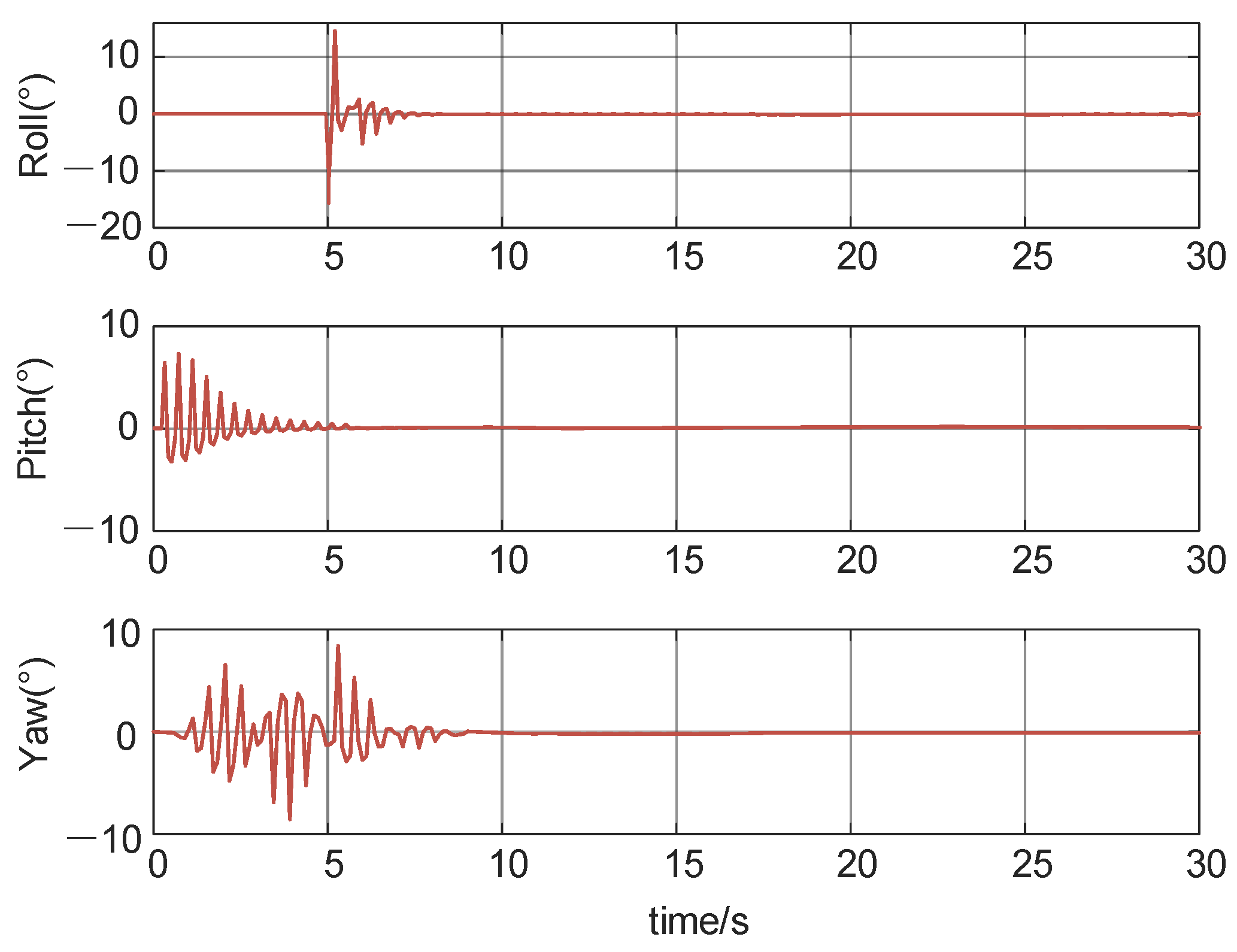
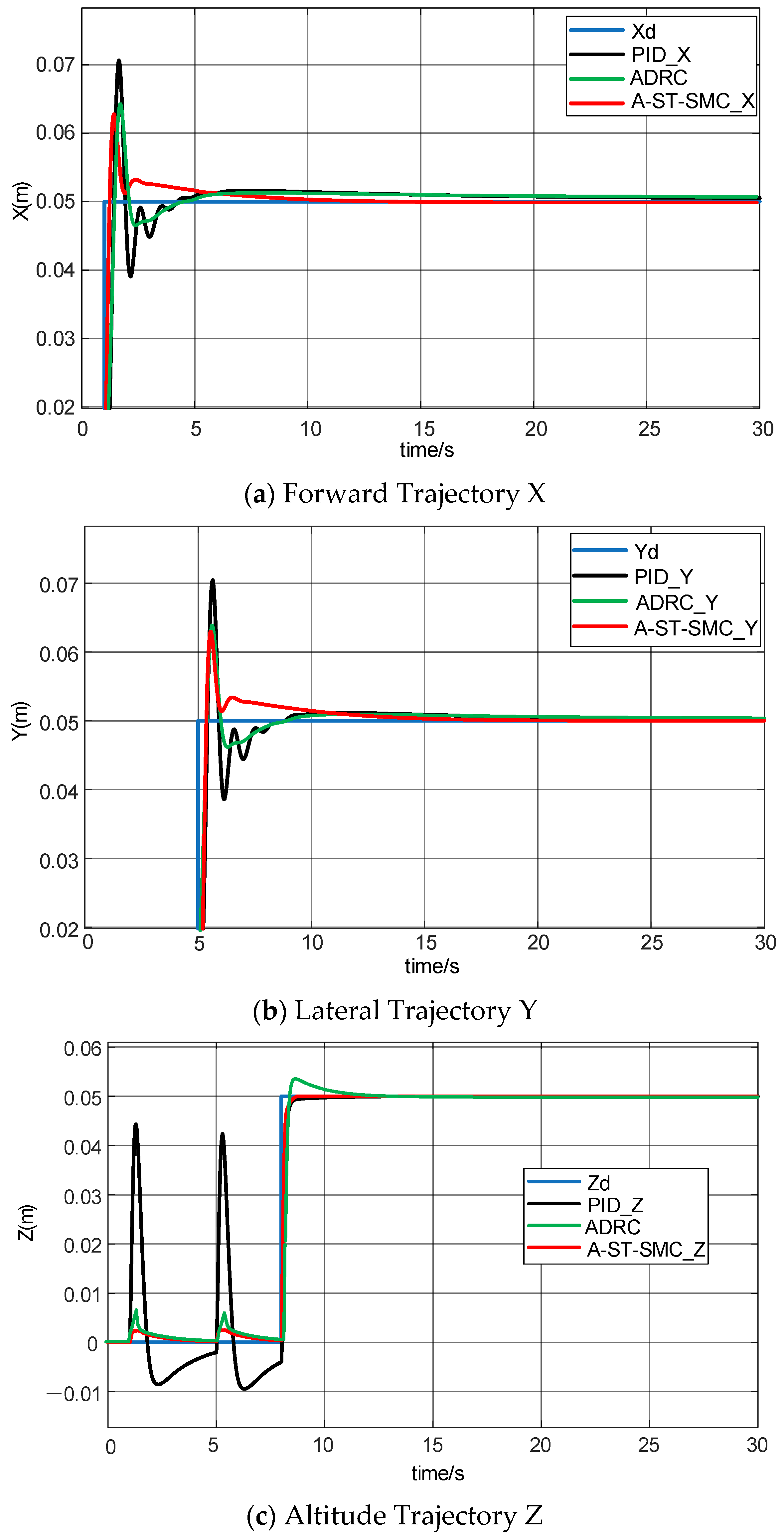
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Q. Research on UAV control based on intelligent fuzzy PID control. In Proceedings of the 2024 IEEE 4th International Conference on Power, Electronics and Computer Applications (ICPECA), Shenyang, China, 26–28 January 2024; pp. 1053–1056. [Google Scholar] [CrossRef]
- Song, W.; Li, Z.; Xu, B.; Wang, S.; Meng, X. Research on improved control algorithm of quadrotor UAV based on fuzzy PID. In Proceedings of the 2022 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 24–26 June 2022; pp. 361–365. [Google Scholar] [CrossRef]
- Ziquan, Y.; Youmin, Z.; Bin, J. PID-type fault-tolerant prescribed performance control of fixed-wing UAV. J. Syst. Eng. Electron. 2021, 32, 1053–1061. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, L. Position and attitude control based on single neuron PID with gravity compensation for quadrotor UAV. J. Aerosp. Technol. Manag. 2023, 15, e1023. [Google Scholar] [CrossRef]
- Yuan, M.; Wang, C.; Zhang, P.; Wei, C. PID with deep reinforcement learning and heuristic rules for autonomous UAV landing. In Proceedings of the International Conference on Autonomous Unmanned Systems, Xi’an, China, 23–25 September 2022; Springer: Singapore, 2022. [Google Scholar] [CrossRef]
- Takaoğlu, F.; Alshahrani, A.; Ajlouni, N.; Ajlouni, F.; Al Kasasbah, B.; Özyavaş, A. Robust nonlinear non-referenced inertial frame multi-stage PID controller for symmetrical structured UAV. Symmetry 2022, 14, 689. [Google Scholar] [CrossRef]
- Huang, J.; Ma, X.; Wang, B.; Zhang, Y.; Xin, G.; Zhang, Y. Trajectory tracking control of a quadrotor UAV by cascaded inner-outer-loop backstepping sliding mode control. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022; pp. 4725–4730. [Google Scholar] [CrossRef]
- Shi, X.; Hu, B.; Yin, C.; Cheng, Y.; Huang, X. Design of trajectory tracking controller with fractional-order backstepping sliding mode method for quadrotor UAV. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 5960–5965. [Google Scholar] [CrossRef]
- Li, Y.; Tong, J. 3D multi-UAV coupled formation control based on backstepping control method. In Proceedings of the 2024 IEEE 6th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 24–26 May 2024; pp. 1517–1521. [Google Scholar] [CrossRef]
- Gai, W.; Liu, X.; Zhang, J.; Zhang, G. Multi-UAVs formation fault-tolerant control based on the adaptive backstepping approach. In Proceedings of the 2023 2nd Conference on Fully Actuated System Theory and Applications (CFASTA), Qingdao, China, 14–16 July 2023; pp. 514–519. [Google Scholar] [CrossRef]
- Xu, H.; Zhou, Y.; Jiang, G.; Yang, H.; Han, S.; Li, X. Finite-time backstepping control for quadrotor UAV with uncertain disturbances. In Proceedings of the 2023 35th Chinese Control and Decision Conference (CCDC), Yichang, China, 20–22 May 2023. [Google Scholar] [CrossRef]
- Kang, H.H.; Kim, K.S.; Lee, S.S.; Ahn, C.K. Finite window neural network based sliding mode control for a UAV system. In Proceedings of the 2024 IEEE International Conference on Big Data and Smart Computing (BigComp), Bangkok, Thailand, 18–21 February 2024. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, W.; Suzuki, S.; Namiki, A.; Liu, H.; Li, Z. Design and implementation of UAV velocity controller based on reference model sliding mode control. Drones 2023, 7, 130. [Google Scholar] [CrossRef]
- Pang, Q.W.; Wang, D.S.; Wu, W.; Chen, Y.; Zhu, Y.Y. Improved BP network based sliding model tracking control for a quadrotor UAV. J. Control Eng. Appl. Inform. 2022, 24, 69–79. [Google Scholar]
- Wang, Y.; Yu, H. Four-Rotor PID Control System Based on Particle Swarm Optimization. Small Spec. Electr. Mach. 2019, 47, 80–82. [Google Scholar]
- Chen, J. Research on Autonomous Flight of Quadrotor Based on Double-loop PID. Mechatronics 2018, 24, 22–27+48. [Google Scholar]
- Li, J.; Wang, N.; Song, X.; Hua, Y. Model Reference Adaptive-Based Backstepping Control for Quadrotor. J. Qingdao Univ. (Eng. Technol. Ed.) 2020, 35, 9–16. [Google Scholar]
- Lian, S.; Zhu, Y.; Meng, W.; Shao, K.; Li, H. Adaptive Fault-Tolerant Control for Quadrotor Based on the Second-Order Fast Nonsingular Terminal Sliding Mode Control. IEEE Trans. Ind. Electron. 2025, 1–11. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, D.; Bai, T.; Zhang, Y. Design of UAV Safety Controller Based on Predictive Error Method. Electron. Opt. Control 2025, 32, 90–94. [Google Scholar]
- Urbina-Brito, N.; Guerrero-Sánchez, M.-E.; Valencia-Palomo, G.; Hernández-González, O.; López-Estrada, F.-R.; Hoyo-Montaño, J.A. A predictive control strategy for aerial payload transportation with an unmanned aerial vehicle. Mathematics 2021, 9, 1822. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.-E.; Hernández-González, O.; Lozano, R.; García-Beltrán, C.-D.; Valencia-Palomo, G.; López-Estrada, F.-R. Energy-based control and LMI-based control for a quadrotor transporting a payload. Mathematics 2019, 7, 1090. [Google Scholar] [CrossRef]
- Gui, Y.; Zheng, B.; Gao, P. Sliding mode attitude control of quadrotor UAV based on NESO-LFDC. Syst. Eng. Electron. 2024, 46, 1075–1083. [Google Scholar]
- Xiang, Z.; Mao, J. Modeling and Simulation of Rotor Aerodynamics for Four-Rotor UAV. Comput. Simul. 2021, 38, 48–52. [Google Scholar] [CrossRef]
- Tahir, Z.; Tahir, W.; Liaqat, S.A. State space system modelling of a quad copter UAV. arXiv 2019, arXiv:1908.07401. [Google Scholar]
- Ruderman, M.; Pisano, A.; Usai, E. Energy-saving sub-optimal sliding mode control with bounded actuation. arXiv 2023, arXiv:2305.07891. [Google Scholar]
- Gao, Z. On the foundation of active disturbance rejection control. Control Theory Appl. 2013, 30, 1498–1510. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Z.; Liu, Z. Attitude control of a quad-rotor robot based on ADRC. J. Harbin Inst. Technol. 2014, 46, 115–118+123. [Google Scholar] [CrossRef]
- Zhou, M.; Qian, W.; Ren, K. Study of the Guidance Law for Super-Twisting Sliding-Mode Guided Projectiles with Multiple Constraints. Acta Armamentarii 2023, 44, 799–805. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion Form | Motor 1 | Motor 2 | Motor 3 | Motor 4 |
|---|---|---|---|---|
| Vertical Motion | + | + | + | + |
| Pitch (Forward/Backward) | − | − | + | + |
| Roll (Lateral Motion) | − | + | + | − |
| Yaw Motion | + | − | + | − |
| Parameter | Description | Value |
|---|---|---|
| m | UAV mass | 0.698 kg |
| l | Arm length | 0.171 m |
| G | Gravitational acceleration | 9.8 m/s2 |
| Ix | Moment of inertia around X-axis | |
| Iy | Moment of inertia around Y-axis | |
| Iz | Moment of inertia around Z-axis | |
| Gain coefficients | 30 | |
| Gain coefficients | 300 | |
| Gain coefficients | 1000 | |
| Sliding mode gains | 20 | |
| kp | Proportional term in PID control | 2 |
| kd | Derivative term in PID control | 5 |
| PID | ADRC | ST-SMC | |
|---|---|---|---|
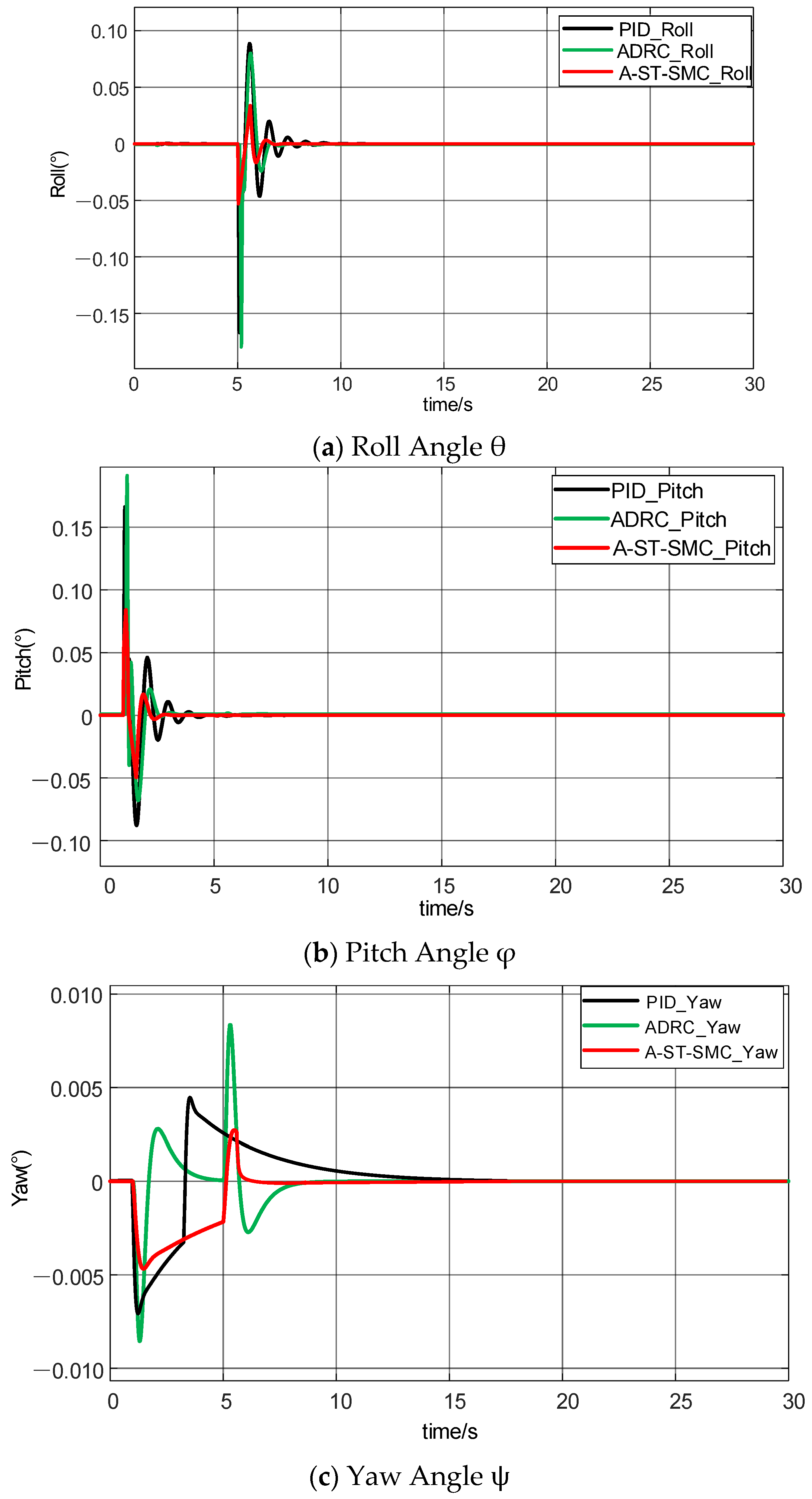
| The maximum amplitude of the pitch angle (in radians) | 0.016 | 0.019 | 0.008 |
| Time required for the pitch angle channel to stabilize (in seconds) | 5.516 | 3.687 | 2.763 |
| The maximum amplitude of the roll angle (in radians) | 0.088 | 0.083 | 0.034 |
| Time required for the roll angle channel to stabilize (in seconds) | 9.631 | 7.219 | 6.764 |
| The maximum amplitude of the yaw angle (in radians) | −0.00712 | 0.00834 | −0.00467 |
| Time required for the yaw angle channel to stabilize (in seconds) | 17.267 | 8.873 | 6.326 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, B.; Guo, Y.; Zheng, J.; Li, Z.; Gong, J.; Hui, N.; Han, X. Research on the Stability of UAV Attitude Under Hybrid Control Integrating Active Disturbance Rejection Control and Super-Twisting Sliding Mode Control. Appl. Sci. 2025, 15, 5124. https://doi.org/10.3390/app15095124
Wu B, Guo Y, Zheng J, Li Z, Gong J, Hui N, Han X. Research on the Stability of UAV Attitude Under Hybrid Control Integrating Active Disturbance Rejection Control and Super-Twisting Sliding Mode Control. Applied Sciences. 2025; 15(9):5124. https://doi.org/10.3390/app15095124
Chicago/Turabian StyleWu, Baoju, Yunqian Guo, Jiaxiang Zheng, Zhongsheng Li, Jinyu Gong, Nanmu Hui, and Xiaowei Han. 2025. "Research on the Stability of UAV Attitude Under Hybrid Control Integrating Active Disturbance Rejection Control and Super-Twisting Sliding Mode Control" Applied Sciences 15, no. 9: 5124. https://doi.org/10.3390/app15095124
APA StyleWu, B., Guo, Y., Zheng, J., Li, Z., Gong, J., Hui, N., & Han, X. (2025). Research on the Stability of UAV Attitude Under Hybrid Control Integrating Active Disturbance Rejection Control and Super-Twisting Sliding Mode Control. Applied Sciences, 15(9), 5124. https://doi.org/10.3390/app15095124