1. Introduction
Modeling the hydrodynamics of Wave Energy Converters (WECs) is fundamental to the development of effective control strategies. A widely adopted approach is based on the Cummins equation [
1,
2], which utilizes convolution integrals to account for fluid memory effects. Although accurate, this method is computationally intensive and complicates real-time determination of hydrodynamic parameters essential for optimizing Power Take-Off Unit (PTO) control.
Traditional WEC control techniques, such as passive impedance matching, typically assume a monochromatic wave environment and fixed optimal damping parameters [
3]. However, real ocean conditions are broadband and irregular, making static control suboptimal. Real-time reactive control, which dynamically adjusts PTO damping based on incoming wave characteristics, offers a computationally efficient alternative better suited for such environments [
4].
Recently, novel control architectures have explored the use of instantaneous frequency estimation based on the WEC’s own velocity signal rather than external wave measurements. Cantarellas et al. [
5] proposed an adaptive vector control strategy that monitors the WEC velocity in real time to infer the dominant wave frequency using a Second-Order Generalized Integrator-based Frequency-Locked Loop (SOGI-FLL) structure. By tuning the PTO damping and reactance according to the estimated instantaneous velocity frequency, their method achieves maximum power absorption while mitigating large instantaneous power fluctuations.
To support real-time adaptation, various instantaneous frequency estimation methods have been explored, particularly for estimating the excitation force or surface elevation signals. Notable approaches include the Hilbert–Huang Transform (HHT) via Empirical Mode Decomposition (EMD), Frequency-Locked Loop (FLL), and Extended Kalman Filter (EKF) techniques [
6]. Beyond frequency estimation, advanced control strategies have been proposed to enhance WEC performance under broadband and irregular sea conditions. For example, Giorgi et al. [
7] introduced a time-varying damping control strategy, originally developed for vibration energy harvesters, which involves modulating the PTO damping coefficient at twice the wave excitation frequency to broaden the energy absorption bandwidth. They also demonstrated that the real-time adaptation of the PTO damping, even without complex predictive models, can significantly improve energy capture in irregular sea states.
Recognizing the importance of practical implementation, García-Violini et al. [
8] reviewed simplified WEC control architectures based on impedance matching principles, highlighting the advantages of linear time-invariant (LTI) controllers and straightforward feedback structures suitable for embedded hardware.
Experimental validation has substantiated these theoretical findings. Fusco et al. [
9] demonstrated, using the Pendulum Wave Energy Converter (PeWEC) device, that properly adapting the PTO damping in response to sea states leads to significant improvements in harvested energy. Similarly, Courtney et al. [
10] confirmed that maximizing energy extraction under broadband spectra requires the real-time adjustment of the PTO force profile. These results underline the practical importance of real-time adaptive damping control and motivate the development of computationally efficient, sensor-based control approaches.
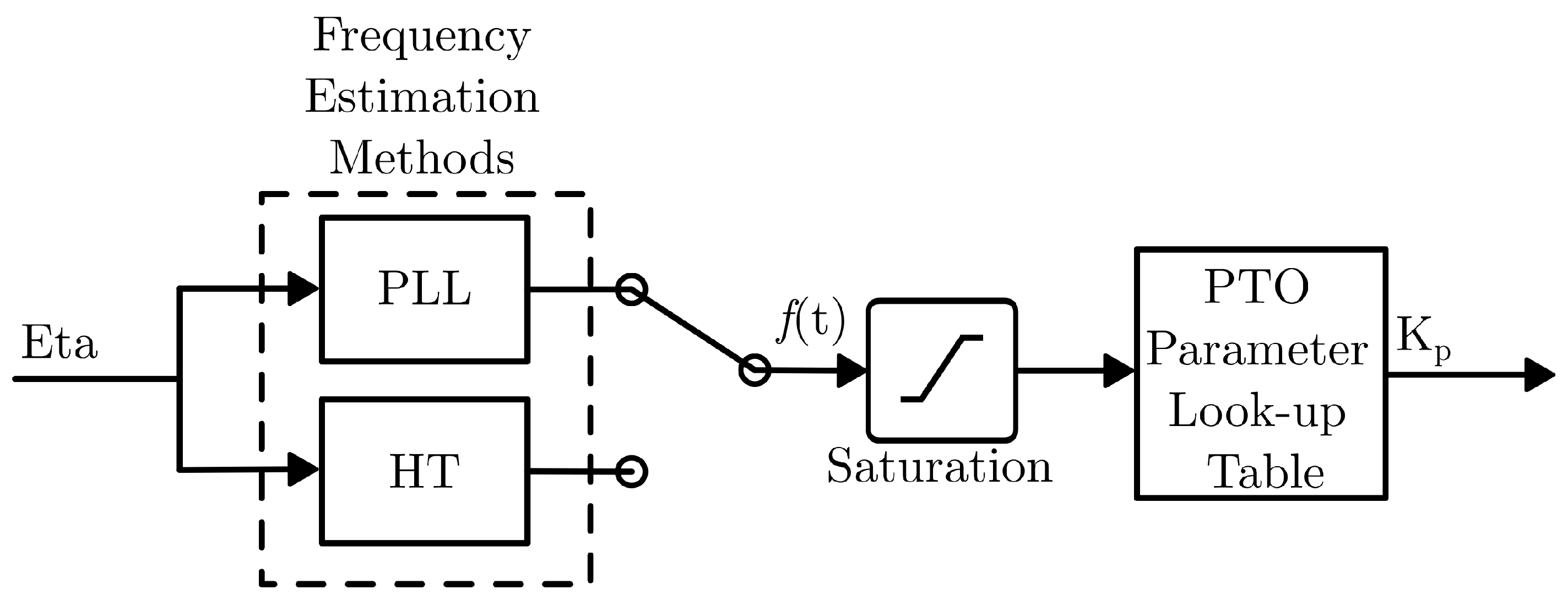
Building upon these foundations, the present work proposes a novel extension by investigating real-time instantaneous frequency estimation techniques for practical WEC control. Specifically, this study explores the application of the Hilbert Transform (HT) with median filtering and the Phase-Locked Loop (PLL) methods for real-time frequency tracking and dynamic PTO parameter adaptation.
A previous approach [
11] leveraged linear wave theory and hydrodynamic datasets generated from Boundary Element Method (BEM) solvers like WAMIT [
12] to express hydrodynamic coefficients as functions of instantaneous wave frequency, significantly reducing computational overhead. However, prior methods required complete future water elevation data, limiting practical real-time applicability.
This study focuses on the real-time estimation of wave surface elevation’s instantaneous frequency without requiring future data. By leveraging linear wave theory assumptions, where hydrodynamic coefficients mainly depend on wave frequency, this method enables the practical adaptation of impedance-matching control strategies for WEC systems in irregular sea conditions.
The research aims to develop implementable real-time WEC control strategies that are computationally efficient, robust under realistic conditions, and compatible with standard onboard measurements. The central hypothesis is that dynamically adapting PTO damping based on real-time frequency estimates enhances energy absorption efficiency, with precomputed frequency-dependent hydrodynamic coefficients being accurately adjusted using these estimates. Validation is achieved by demonstrating improved Capture Width Ratio compared to fixed parameter strategies.
3. Comparison of Methods
To evaluate the performance of the frequency estimation techniques, four different wave scenarios were analyzed:
Case 1: Sinusoidal fluctuation in frequency centered around a 9 s dominant period.
Case 2: Step change in wave amplitude, maintaining the frequency condition of Case 1.
Case 3: A 50% step increase in frequency from the baseline 9 s condition.
Case 4: JONSWAP sea condition with a 9 s peak period and a peak enhancement factor .
These scenarios, with simulation examples illustrated in
Figure 3,
Figure 4,
Figure 5 and
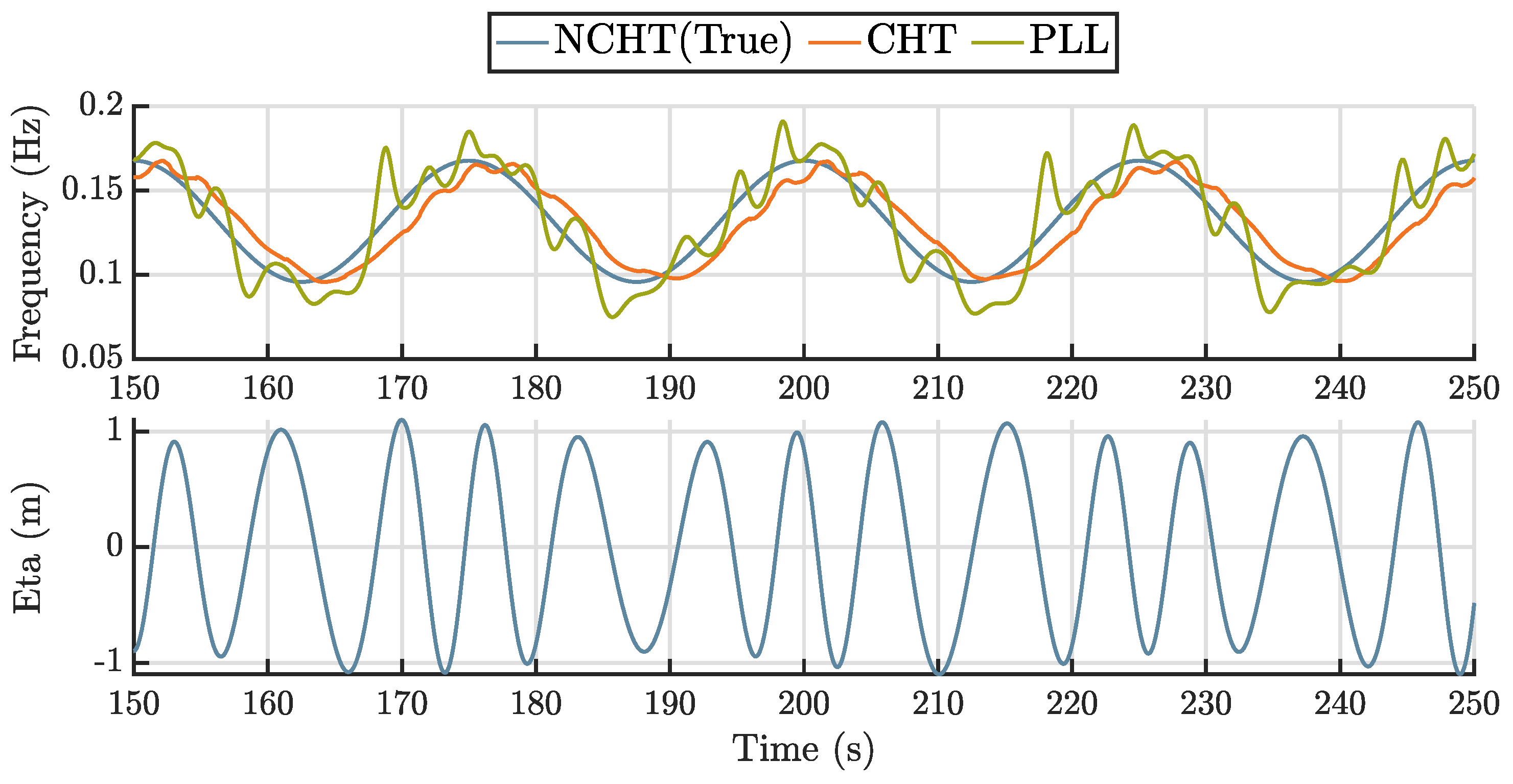
Figure 6, provide a comprehensive basis for evaluating the accuracy and robustness of each frequency estimation method. In each case, the true instantaneous frequency is compared against the estimates obtained using the CHT and PLL approaches.
3.1. NRMSE Comparison of Estimation Methods
The normalized root mean square error (NRMSE) is computed as follows:
where
and
represent the estimated and true instantaneous frequencies, respectively, and
and
denote the maximum and minimum observed frequencies.
Parameter Sensitivity Analysis for Instantaneous Frequency Estimation
To determine the optimal tuning parameters for the instantaneous frequency estimation methods, an iterative parameter sweep was performed using 50 different random wave realizations. In each iteration, a JONSWAP wave elevation time series was generated over a 1200 s duration, sampled at 10 Hz. The key wave parameters were set as follows: a significant wave height of , a peak frequency of , uniformly distributed random phase information, and a spectral peakedness parameter .
The generated time series were characterized by an energy mean frequency
, defined as follows:
where
and
are the zeroth and first spectral moments, respectively. The
n-th spectral moment
is given by the following:
where
is the wave energy spectrum. Specifically,
represents the total energy of the spectrum while
quantifies the energy-weighted mean frequency. These spectral moments were numerically computed based on the discretized JONSWAP spectrum used in each random realization.
The resulting time series, denoted as Case 4, served as the input for both the CHT- and PLL-based instantaneous frequency estimation tests. This setup ensured that the parameter tuning was evaluated under realistic, irregular sea conditions exhibiting broadband frequency content.
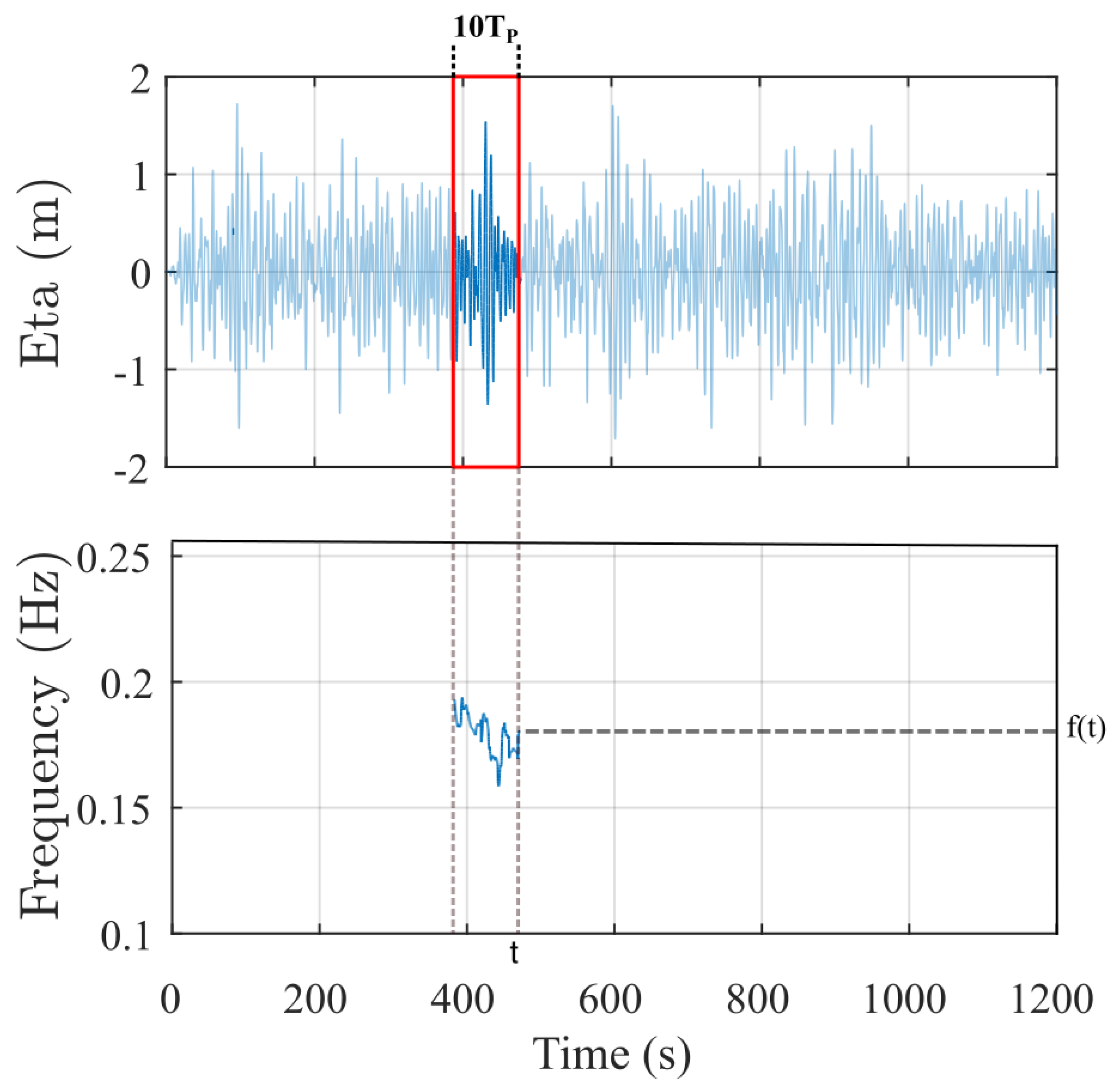
For each wave realization, the true instantaneous frequency was assumed to be computed using a Non-Causal Hilbert Transform (NCHT) algorithm, which has full access to both the past and future history of the signal. In contrast, the CHT method relies on the choice of a median window to estimate the instantaneous frequency. The median window was defined to cover approximately ten wave cycles, calculated as follows:
where
is the energy mean frequency and
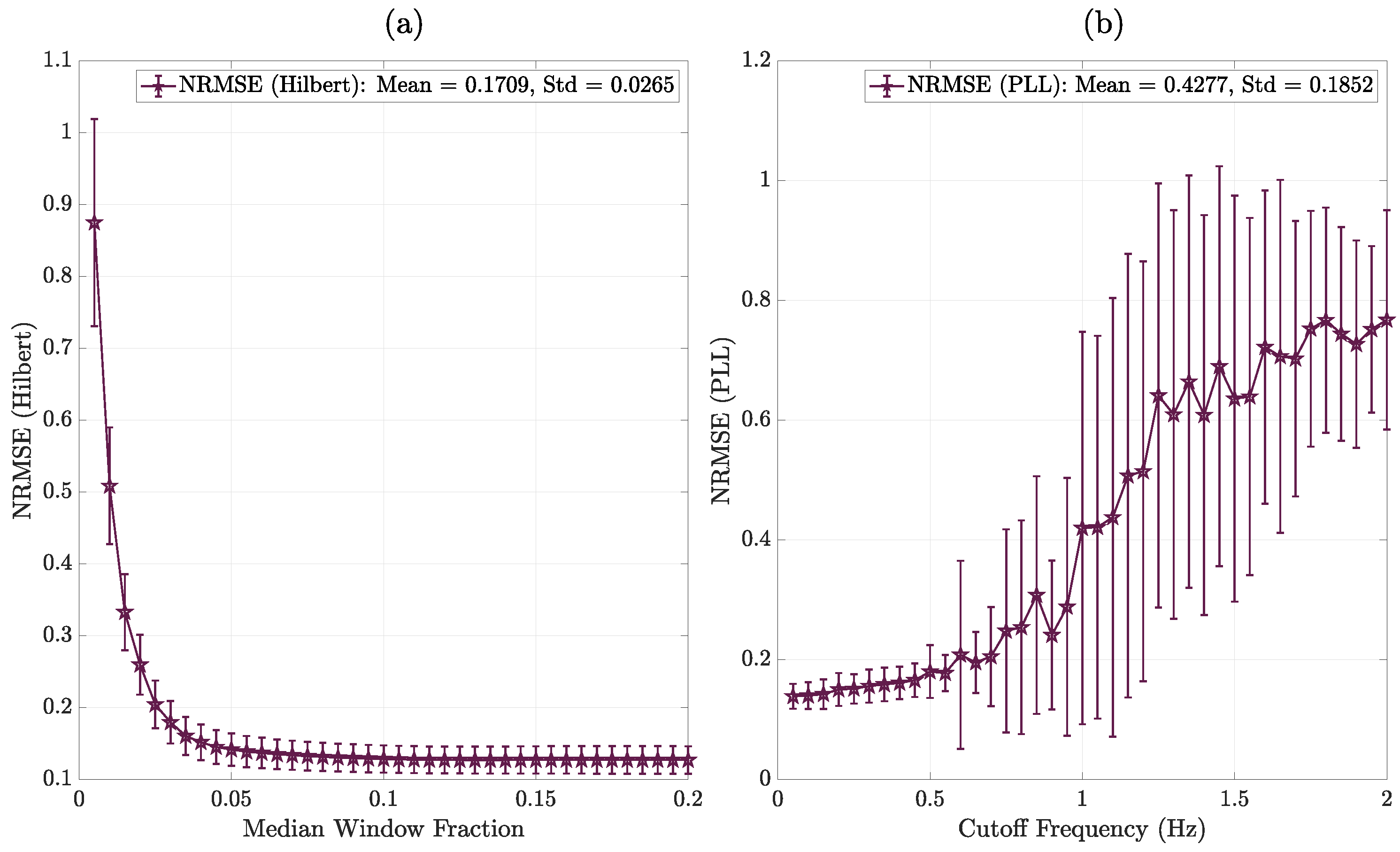
is the simulation time step. The median window fraction is defined as the ratio of the chosen median window size to the total analysis window size. In the parameter sweep, the median window fraction was varied from 0.005 to 0.2 in increments of 0.005. For each median window fraction, the CHT-based instantaneous frequency estimate was computed, compared against the true NCHT-derived frequency (after conversion to radians per second), and the corresponding NRMSE was evaluated.
For the PLL method, the key tuning parameter is the cutoff frequency
of the PI controller within the loop filter. The cutoff frequency was swept according to the following:
where
i is the sweep index, ranging from 1 to 40 (corresponding to 0.05 Hz to 2 Hz). For each cutoff frequency, the PI controller gains were tuned to maintain a fixed phase margin of
, using MATLAB’s Linearization Toolbox.
For each tuning parameter value, a simulation of Case 4 was performed, and the PLL-based instantaneous frequency was estimated. This entire parameter sweep procedure was repeated for 50 independent iterations, each corresponding to different random phase information while preserving the same JONSWAP spectral.
Table 1 presents the final comparison of the optimized NRMSE values achieved by the CHT and PLL methods across different wave cases.
An analysis of the CHT and PLL methods reveals varying performance across the four test cases as shown in the
Figure 7. In Cases 1 and 2, the HT method consistently achieved lower NRMSE values (16.91% and 16.93%) compared to PLL (18.82% and 21.46%). In Case 3, however, the PLL method outperformed CHT, achieving an NRMSE of 3.80% versus 6.80% for CHT. In the more challenging broadband condition of Case 4, CHT again demonstrated superior performance with an NRMSE of 14.59%, while the PLL method exhibited a slightly higher error of 17.40%. Overall, the results indicate that while the PLL method offers strong performance in sudden frequency change, the Hilbert-based method tends to provide more robust performance across a broader range of irregular wave conditions as shown in the
Figure 8. Plus, the performance of the PLL is very sensitive to loop gain, while CHT is less so.
3.2. Application of Instantaneous Frequency Estimation to WEC Control
The instantaneous frequency estimation methods described in this paper—namely the CHT and the PLL—are directly applied to optimize real-time control of WECs. In the context of WEC operation, effective energy absorption is highly dependent on the dynamic matching of the PTO system impedance to the time-varying incident wave conditions. Traditional methods relying on fixed or slowly updated parameters may fail to capture the rapid fluctuations present in realistic sea states. By employing real-time instantaneous frequency estimation, the PTO damping can be continuously adjusted based on the current sea state characteristics without requiring full knowledge of future wave profiles. Specifically, the HT approach leverages past wave elevation data within a moving time window to estimate the predominant oscillation frequency, enabling the dynamic calculation of optimal PTO parameters. The PLL method, alternatively, provides a causal and computationally efficient estimation of frequency by locking onto the phase of the incoming wave signal, offering improved tracking performance under rapidly changing conditions. Through these methods, the WEC system is capable of adapting its control strategy on a wave-by-wave basis, resulting in enhanced CWR and improved overall energy harvesting efficiency compared to conventional fixed parameter designs. The proposed framework, therefore, represents a significant step toward practical, real-world WEC deployments where computational efficiency, robustness to non-stationary ocean conditions, and real-time adaptability are critical for maximizing energy capture.
5. Results
Comparison of CWR
Table 4 presents the CWR percentages for different estimation methods and control schemes.
The simulation results shown in
Figure 13 provide insight into the comparative performance of different frequency estimation methods. Notably, the CHT-based control strategy demonstrates a more stable cumulative energy accumulation, suggesting improved consistency in energy capture over the observed period. On the other hand, both the PLL and NCHT methods are associated with higher instantaneous peak powers, which, while occasionally yielding more instantaneous absorbed power, introduce greater variability in the energy harvesting process. The time points at which significant divergence in cumulative energy occurs are under further investigation, aiming to better understand the transient dynamics introduced by different estimation techniques.
During this study, multiple parameter sweep tests were conducted using the RM3 SS model. First, the estimation parameters were varied, including the median filter window sizes for the CHT method and the cross-over frequencies of the PLL loop filter, while maintaining a fixed phase margin of 60 degrees. Second, the saturation block window sizes were adjusted, with the lower saturation limit set to , where denotes the dominant peak frequency of the incoming wave spectrum. It was observed that setting the upper saturation limit to while maintaining the lower limit at yielded the best performance for the PLL technique. However, for the NCHT and CHT methods, allowing an unbounded upper limit, while keeping the same lower limit as in the PLL setup, resulted in higher energy capture. All sweep tests were conducted with the goal of maximizing the CWR.
An important observation from these tests is that the NRMSE of the frequency estimation is not directly correlated with the performance of the PTO control when using the PLL technique. In contrast, the CHT method showed the best performance when the median window size was set at the value corresponding to the minimum NRMSE for Case 1 and Case 2, as presented earlier, which is approximately 4.5% of the total estimation window size and is close to the average half-cycle of the dominant wave. Increasing the median window size beyond this point, while improving smoothing of the frequency estimate, consistently led to a reduction in CWR. Similarly, for the PLL, decreasing the cross-over frequency toward resulted in lower NRMSE values; however, it only improved the CWR up to the level achieved by the fixed PTO control technique. These findings highlight that minimizing estimation error alone is insufficient for maximizing WEC performance—timely adaptation to changing wave conditions is equally, if not more, important. Another interpretation of the observed discrepancies is that the structure of the WEC system itself acts as a causal filter from an input–output perspective, where the input is the wave excitation and the output is the harvested energy. Utilizing non-causal information for tuning, such as with the NCHT, produces overly stabilized estimation that may not allow the system to react dynamically to real-time variations. Therefore, the CHT not only enables real-time operation with lower peak power excursions—beneficial for the sustainability and stability of the power electronics—but also provides the best overall energy harvesting performance.
Figure 14 presents a comparison of the CWR distributions between the baseline control (fixed parameter tuning) and real-time frequency estimation methods. It can be observed that both the CHT and NCHT approaches achieve higher mean CWR values compared to the baseline, whereas the PLL-based control yields a similar level of performance to the fixed parameter case. In particular,
Figure 14d shows a direct comparison between the CHT and NCHT methods, indicating that the CHT method achieves superior performance relative to NCHT.
6. Conclusions
This study presented and compared several methods for real-time instantaneous frequency estimation for WEC control, focusing on PLL, CHT, and NCHT. The results demonstrated that the CHT method achieved superior energy capture performance and better cumulative energy accumulation compared to the baseline fixed parameter tuning and other real-time estimation methods. The NCHT approach also showed improved mean performance over the baseline, while the PLL-based control yielded a performance similar to the fixed parameter case but exhibited higher instantaneous peak powers.
A key finding of the study was that minimizing the NRMSE of frequency estimation alone does not guarantee better energy harvesting performance. Instead, the responsiveness of the estimation method played a critical role. Faster adaptation to wave frequency changes consistently led to higher CWR values, highlighting the importance of real-time estimator responsiveness in WEC control design.
Additionally, practical aspects of implementation were emphasized. The proposed control strategies rely solely on standard WEC sensor measurements, without requiring external wave forecasting, making them well-suited for deployment on embedded hardware systems. Statistical validation using 1000 randomized JONSWAP simulations demonstrated the robustness and repeatability of the proposed methods under irregular sea conditions.
Future work will focus on further enhancing the estimation methods by incorporating predictive modeling. In particular, the use of Long Short-Term Memory neural networks is being explored to forecast future wave signals at an affordable computational cost. Integrating such predictive capabilities with the proposed real-time control framework could further improve robustness under highly dynamic sea conditions. Moreover, the dynamic tuning strategies developed in this study are planned to be experimentally validated using the Laboratory Upgraded Point Absorber developed at Oregon State University [
10].



 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}