


Learning Approach for Angle Estimation Based on Characteristics of Phase Drift

Abstract
1. Introduction
2. Related Work
3. Data Analysis and Model Construction
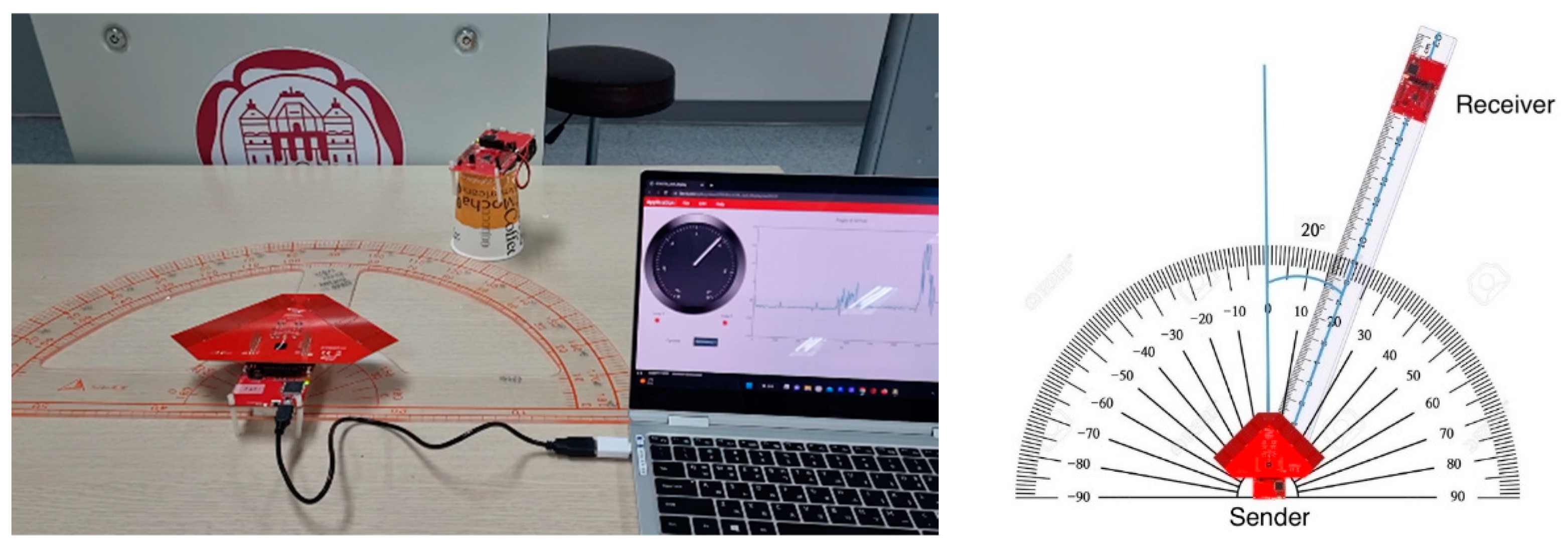
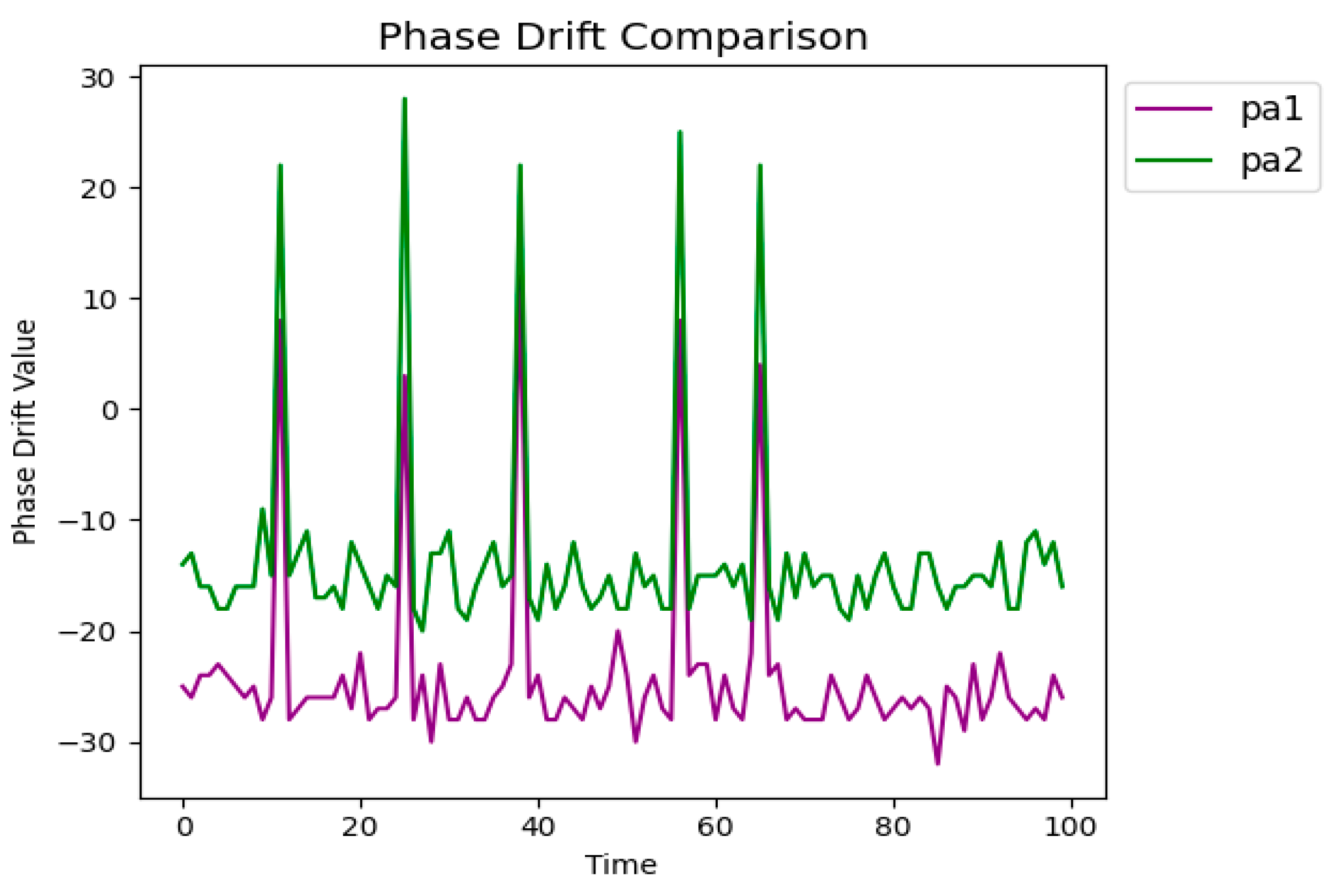
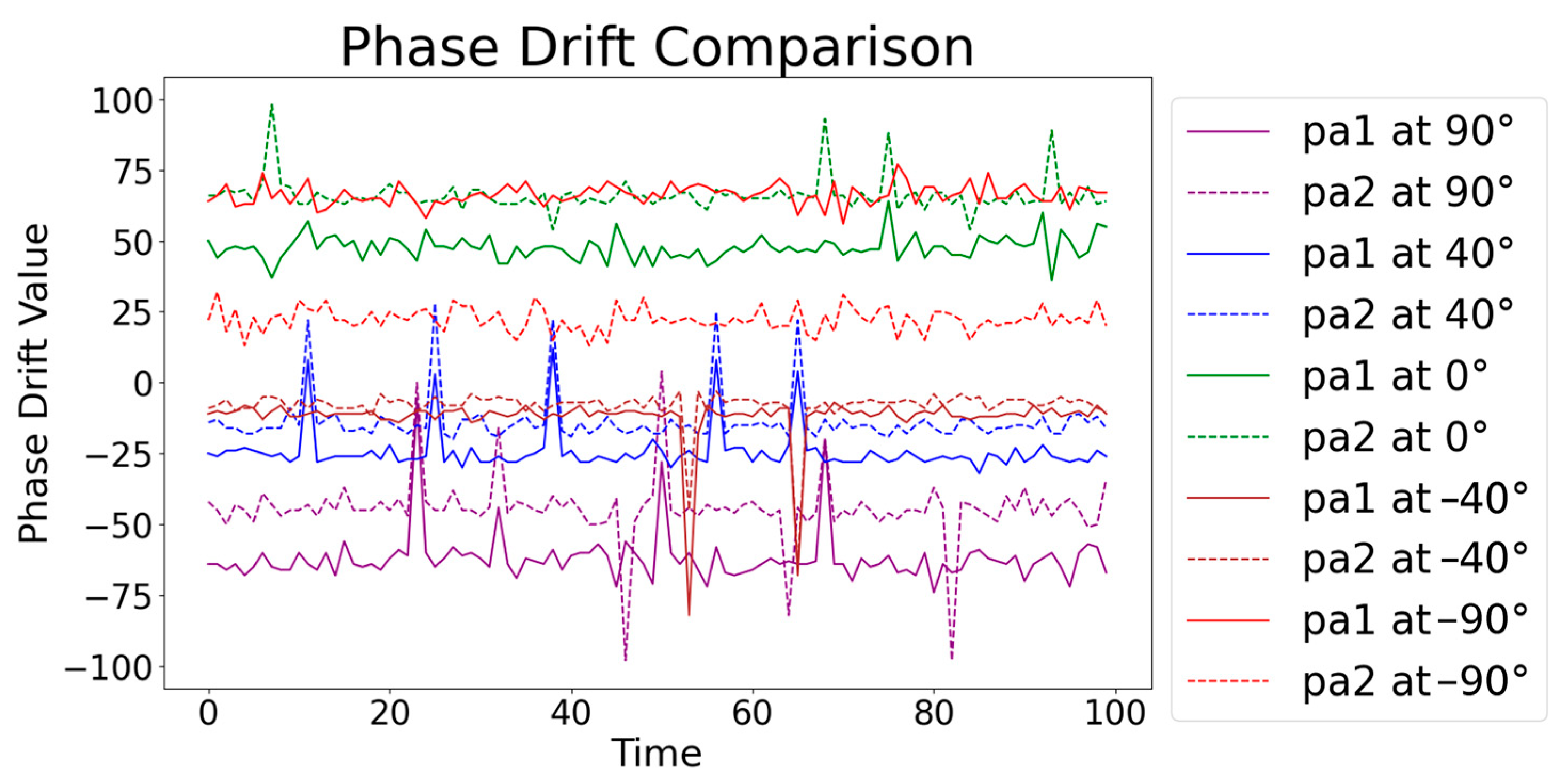
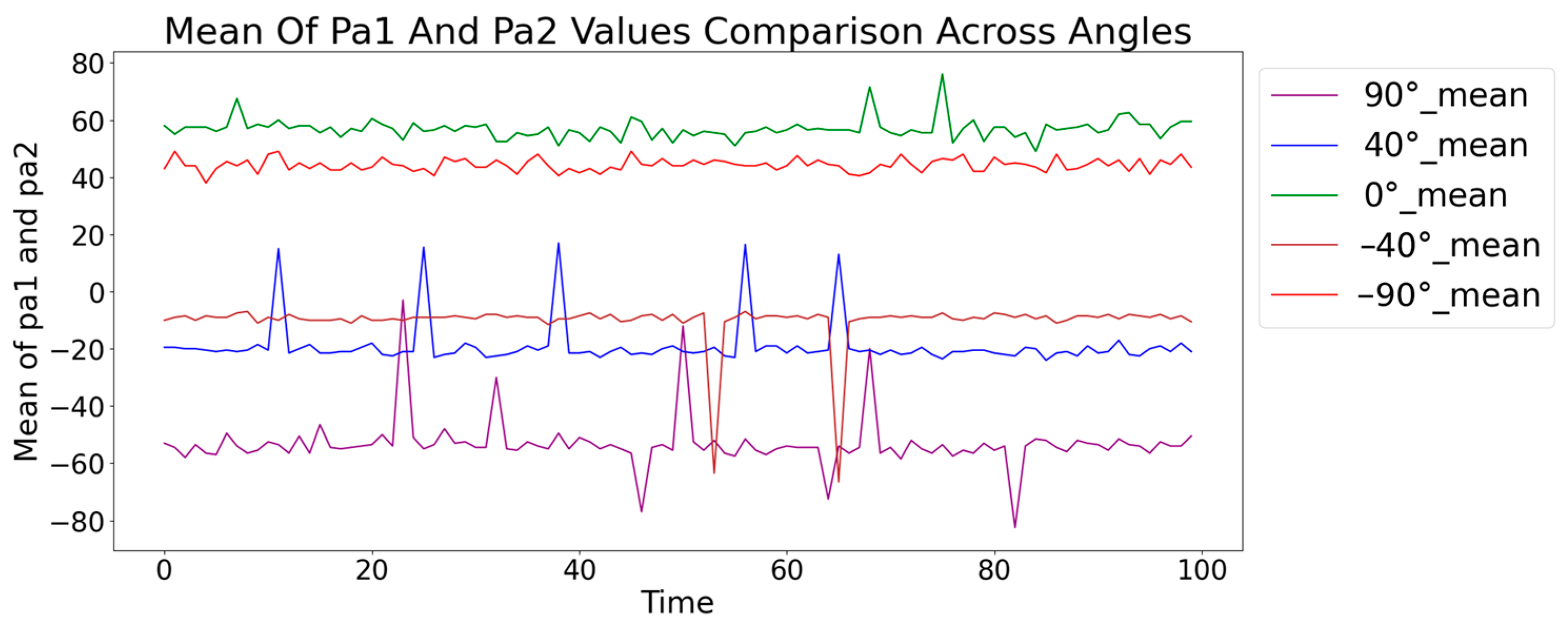
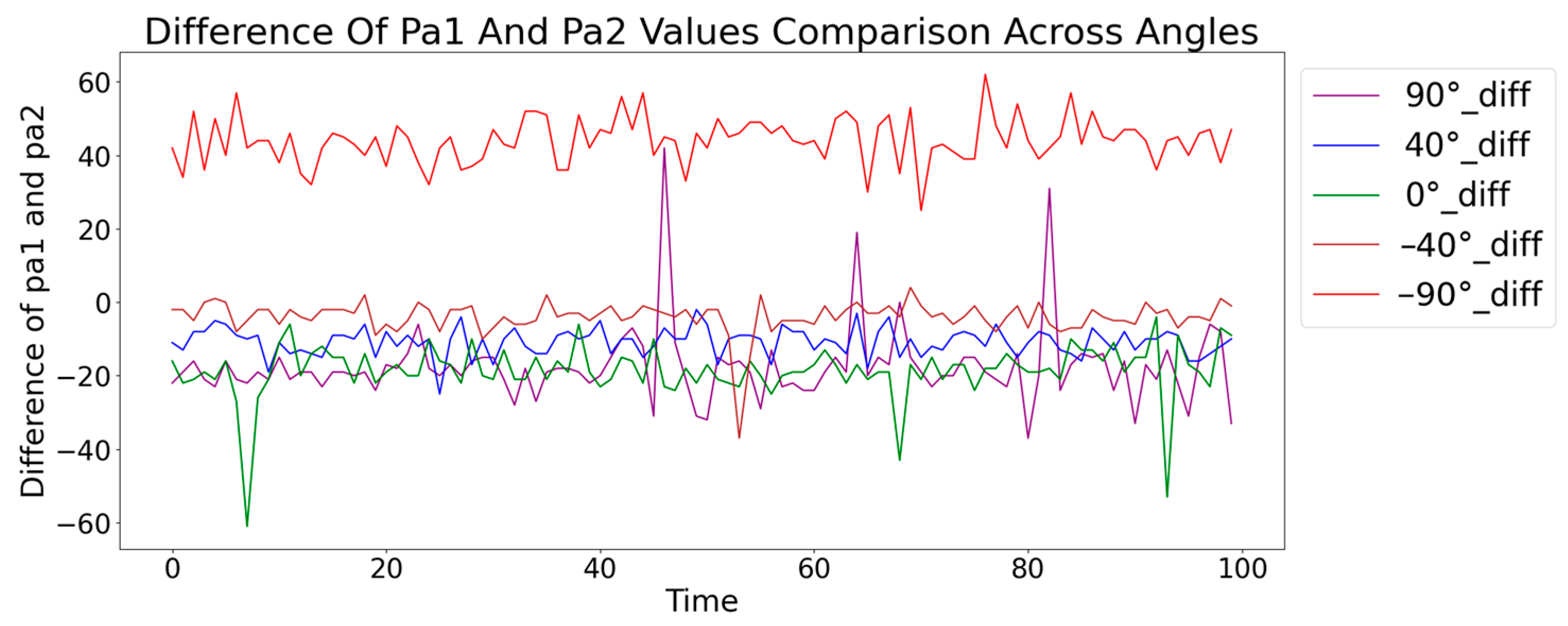
3.1. Radio Signal Analysis for Training Model
3.2. Learning Model Description
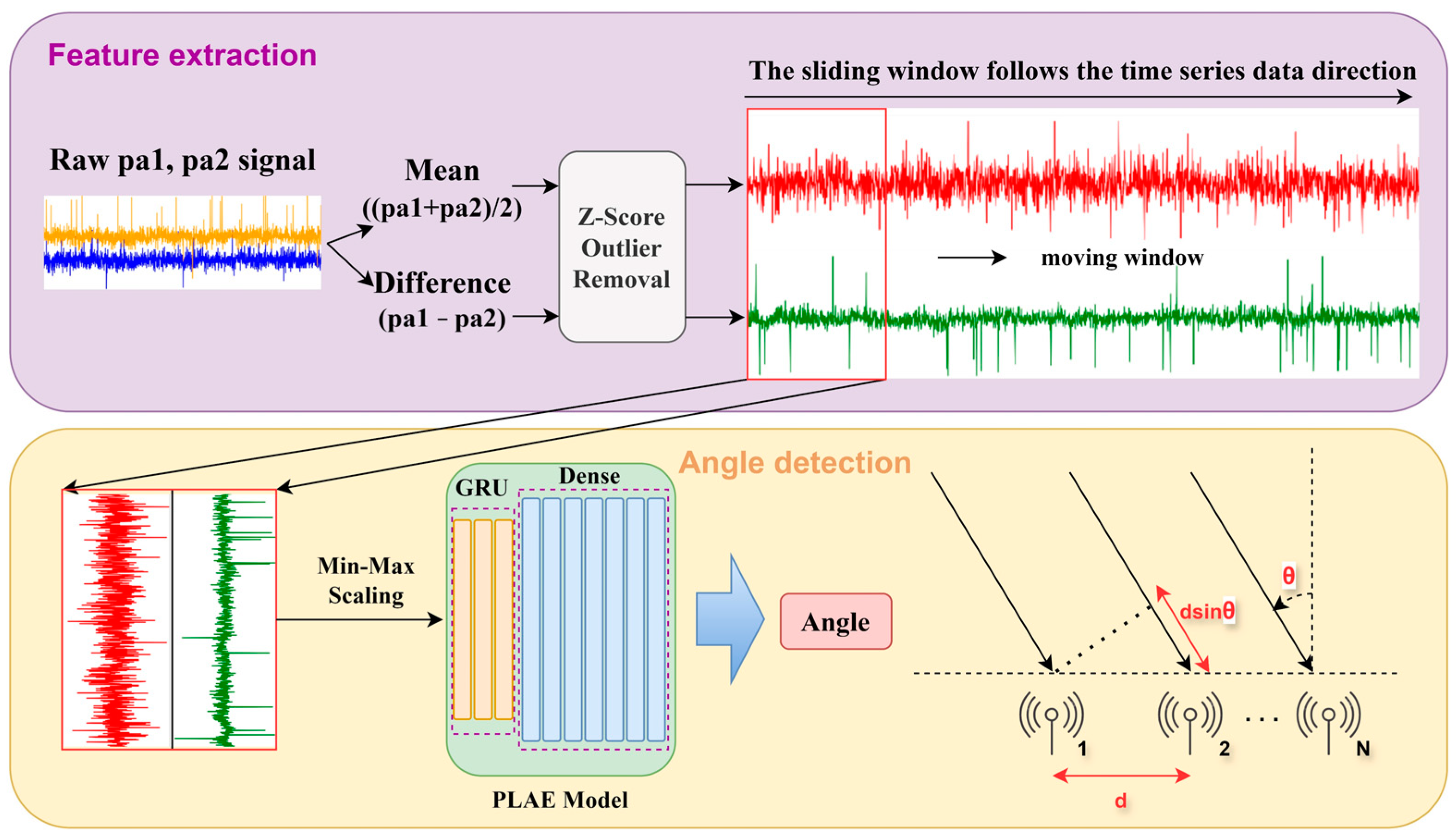
3.2.1. Preprocessing Analyzed Data
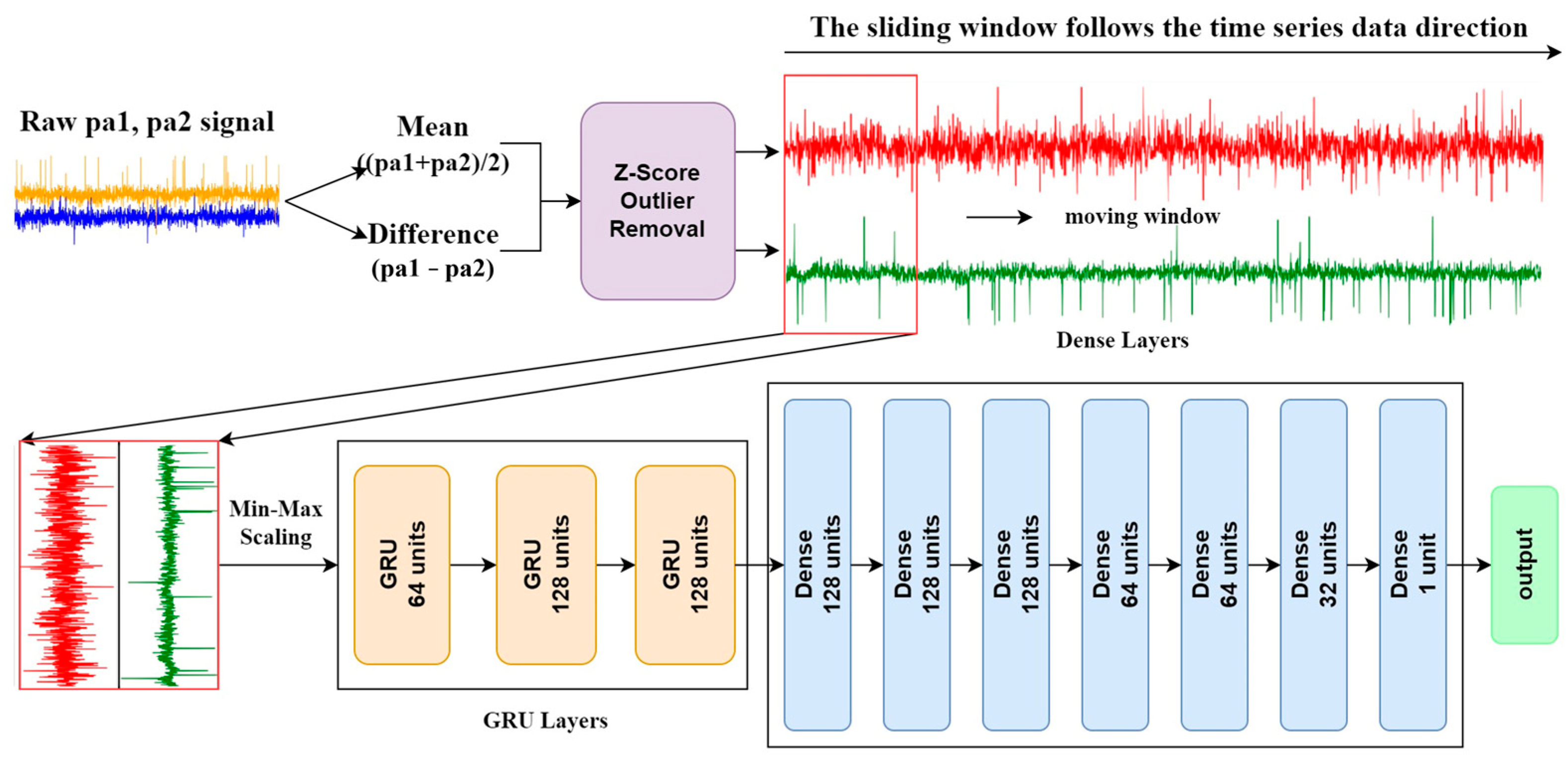
3.2.2. Model Construction
- Update gate (): determines how much of the previous hidden state to carry forward.
- Reset gate (): decides how much of the previous hidden state should be forgotten.
- Current memory content (): calculates the new memory content based on the reset gate.
- Final memory at time t: combines the previous hidden state and the current memory content.
4. Performance Evaluation
4.1. Training Environment and Data Composition
4.2. Outlier Removal
4.2.1. Outlier Definition and Detection
4.2.2. Impact of Outlier Removal
4.3. Analysis of Experiment Results
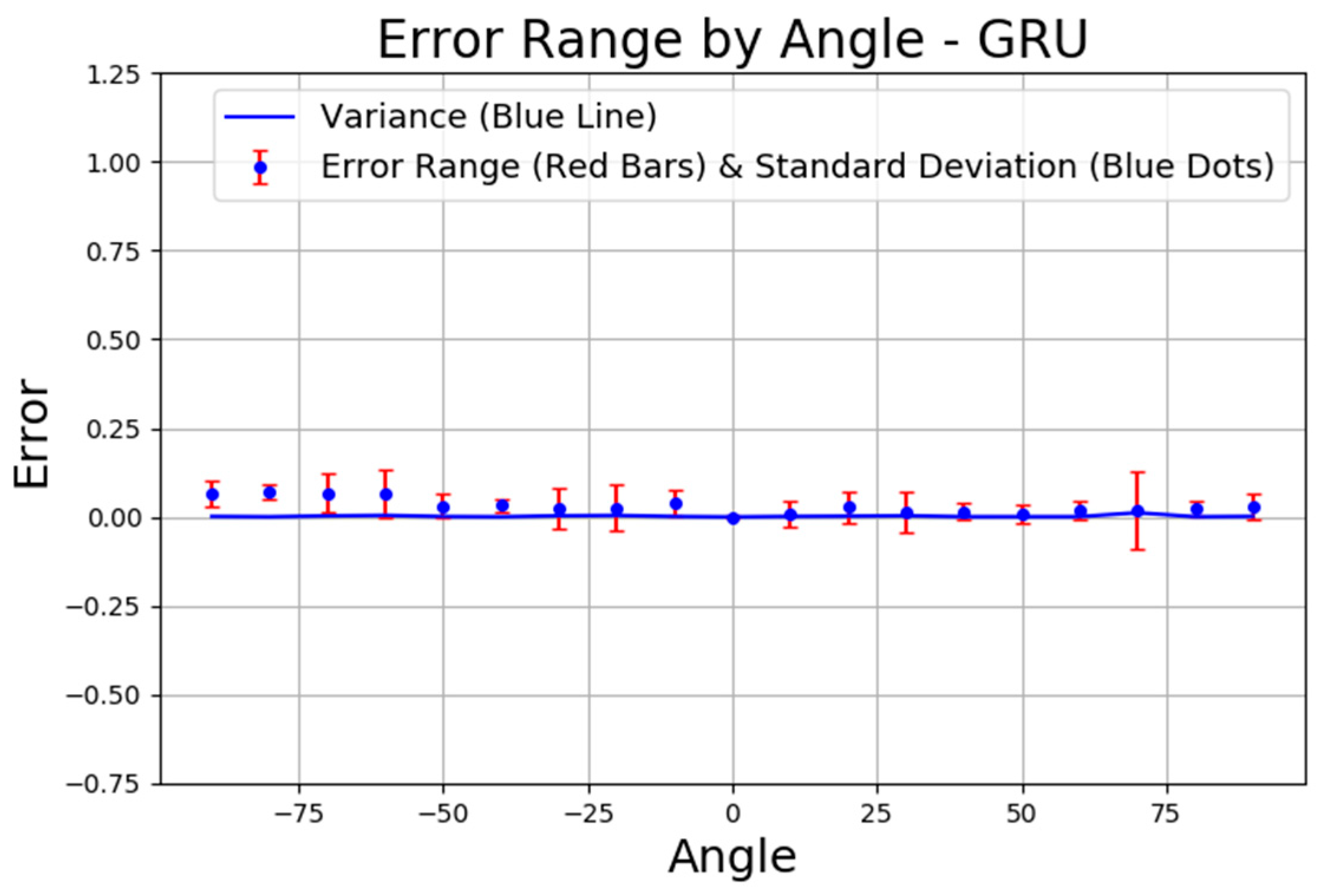
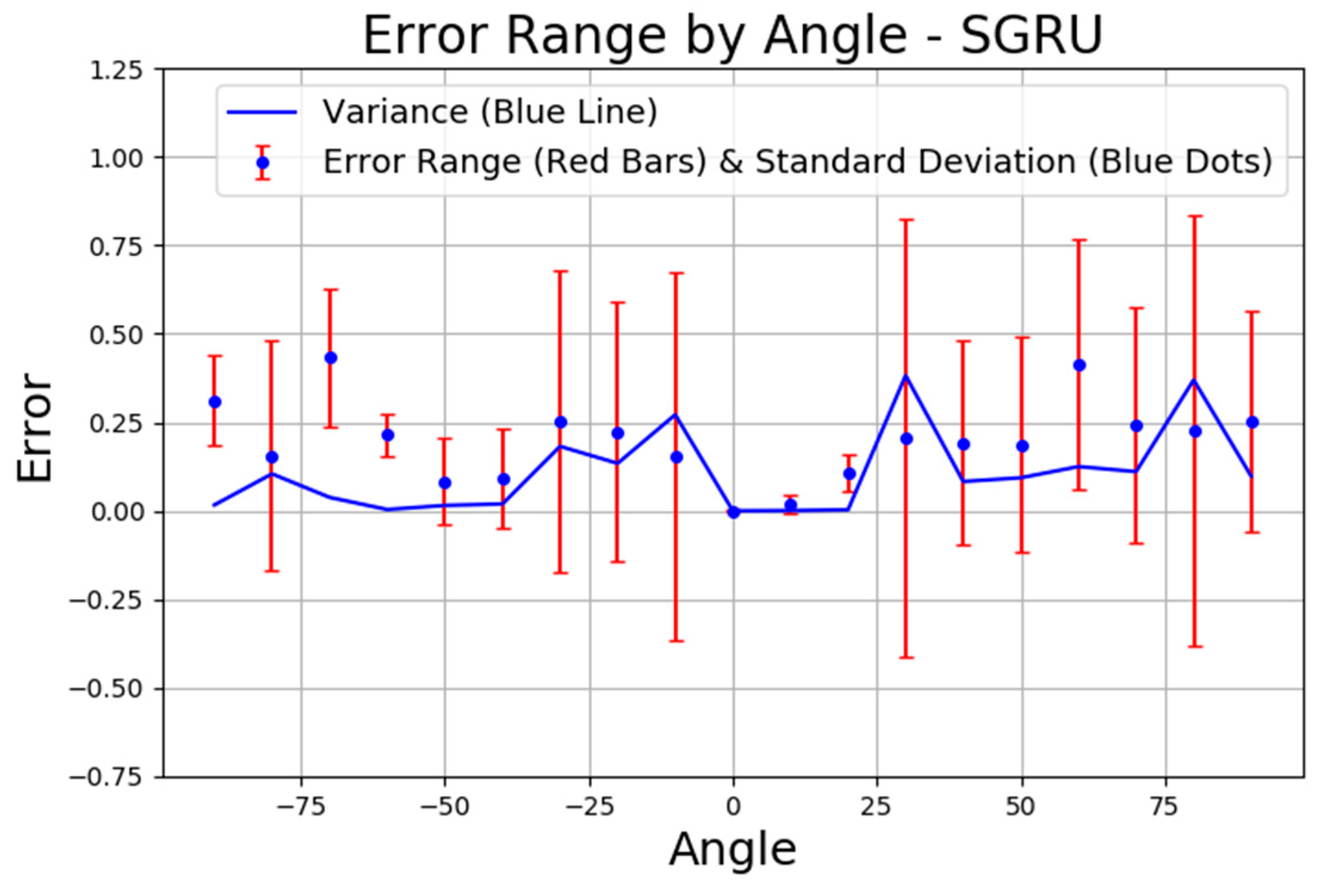
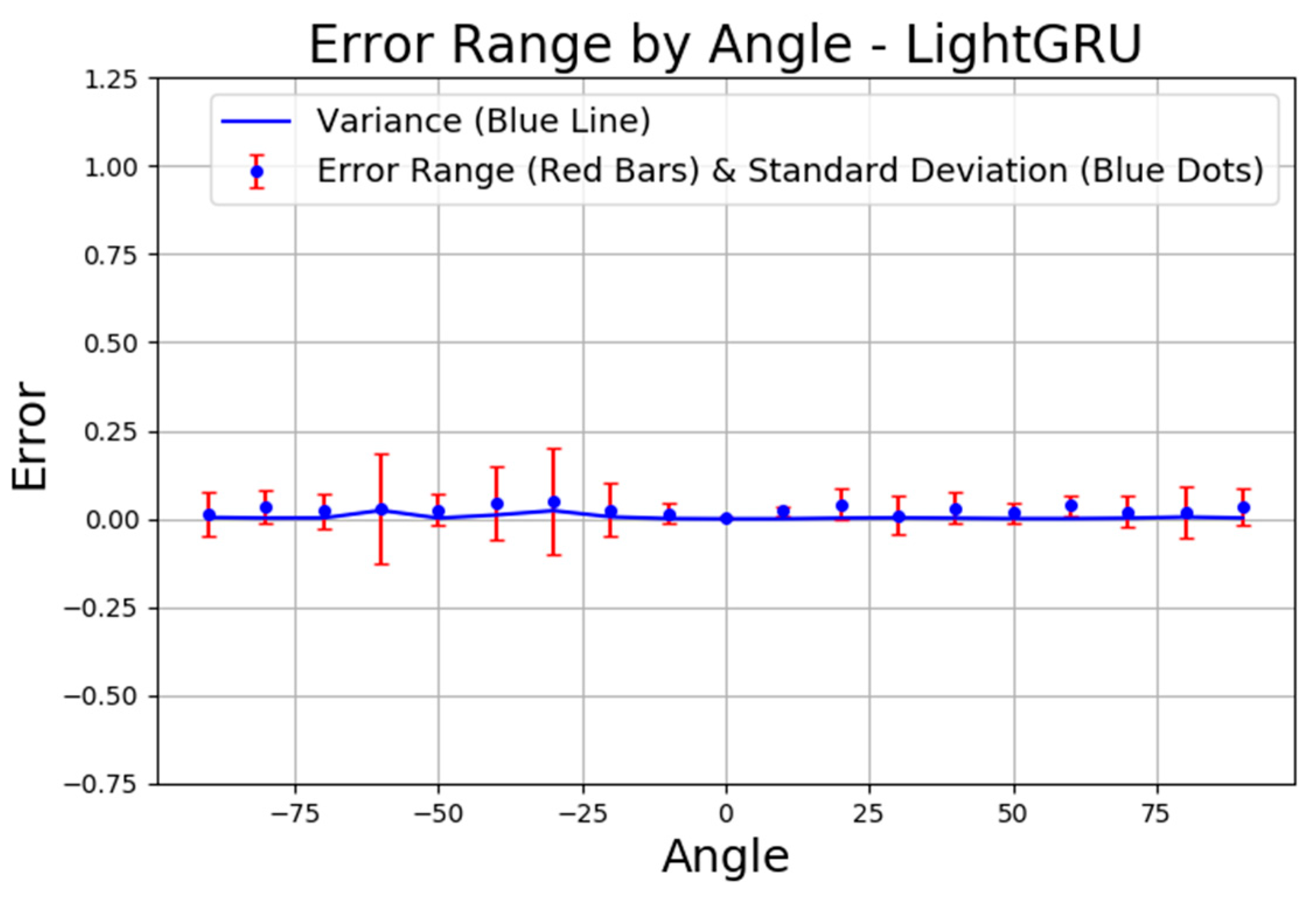
4.3.1. Accuracy of Angle
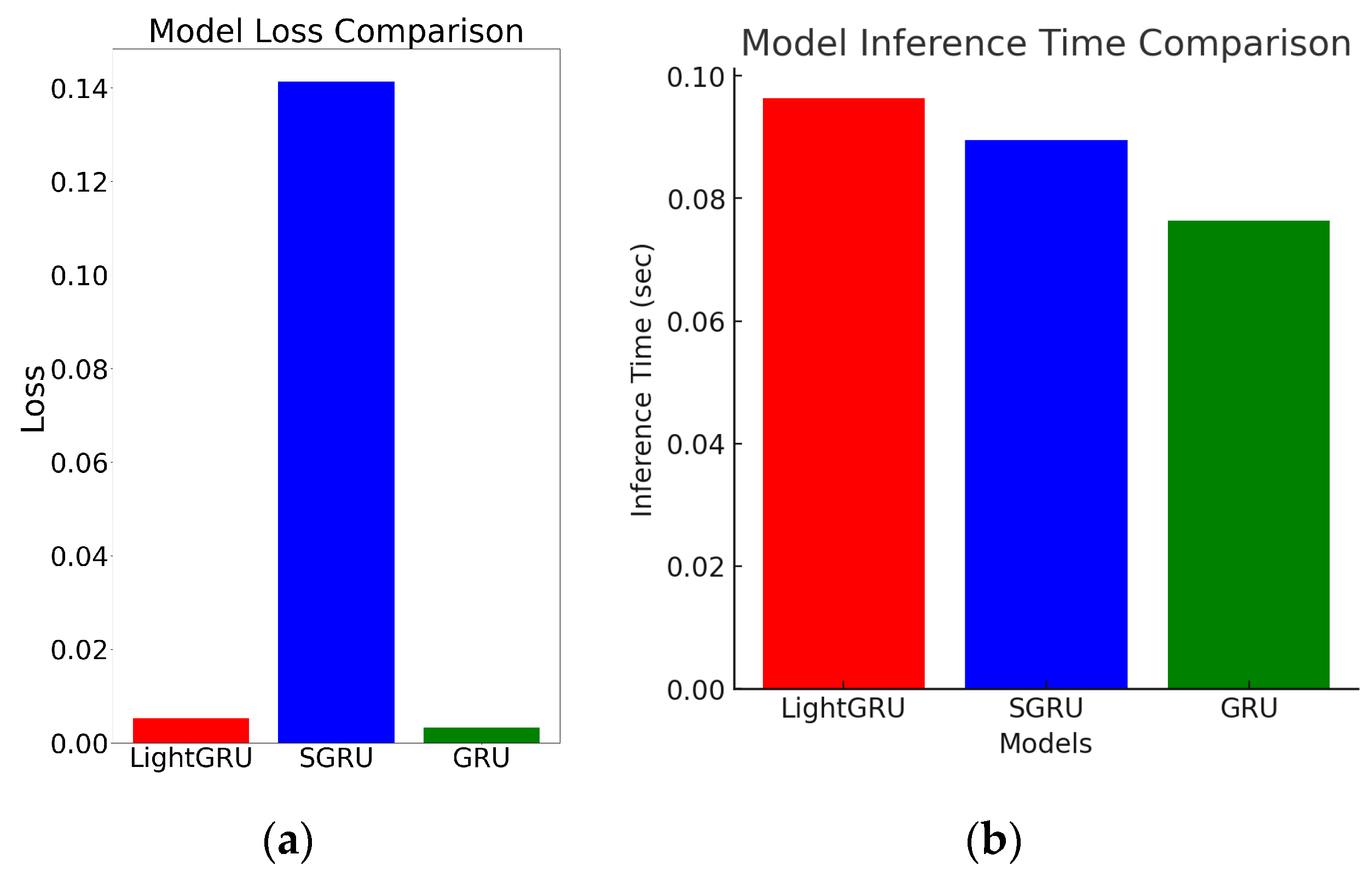
4.3.2. Computation Cost Evaluations
5. Conclusions
- Improvement in AoA estimation: the proposed PLAE model achieved a 99.95% improvement in mean absolute error (MAE) compared to traditional AoA methods, with a maximum deviation of only 6.77 degrees, demonstrating its robustness and accuracy in complex indoor environments.
- Effective handling of environmental challenges: the PLAE model is effective in addressing common challenges such as multipath effects, signal fluctuations, and environmental interferences often encountered in indoor environments.
- Novel approach with phase drift: this study introduces a novel approach by utilizing phase drift values for AoA estimation, confirming their effectiveness as an important feature for enhancing accuracy in complex environments.
- Real-time estimation capability: the PLAE model’s low computational cost enables real-time estimation, making it highly suitable for IoT environments, smart buildings, and other indoor positioning systems.
- Expansion of data collection: future research will focus on expanding data collection to include multiple environments, such as different room sizes, obstacles, and dynamic conditions, to further evaluate the model’s generalizability.
- Applicability to outdoor environments: while this study is focused on indoor positioning, future work could explore its applicability to outdoor environments, where multipath effects and signal conditions vary significantly.
- Real-world deployment considerations: practical challenges related to sensor calibration, hardware constraints, and network integration will be essential for real-world deployment, especially for large-scale IoT applications and embedded systems.
- Optimized lightweight models: future work will also explore the development of optimized lightweight models that ensure efficiency without compromising accuracy for more complex indoor settings.
- Exploring probabilistic approaches: research will investigate probabilistic approaches such as Monte Carlo dropout and Bayesian GRU to enhance model interpretability and provide uncertainty estimation in AoA predictions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guvenc, I.; Chong, C.-C. A Survey on TOA-Based Wireless Localization and NLOS Mitigation Techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Xiong, L. A Selective Model to Suppress NLOS Signals in Angle-of-Arrival (AOA) Location Estimation. In Proceedings of the 9th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Boston, MA, USA, 8–11 September 1998; Volume 1, pp. 461–465. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- UWB Alliance. Available online: https://uwballiance.org/ (accessed on 8 August 2024).
- Wi-Fi Alliance. Available online: https://www.wi-fi.org/ko (accessed on 8 August 2024).
- Bluetooth SIG. Available online: https://www.bluetooth.com/ (accessed on 8 August 2024).
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A Survey of Indoor Positioning Systems for Wireless Personal Networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra-Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location Fingerprinting with Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Nessa, A.; Adhikari, B.; Hussain, F.; Fernando, X.N. A Survey of Machine Learning for Indoor Positioning. IEEE Access 2020, 8, 214945–214965. [Google Scholar] [CrossRef]
- Bellavista-Parent, V.; Torres-Sospedra, J.; Perez-Navarro, A. New Trends in Indoor Positioning Based on WiFi and Machine Learning: A Systematic Review. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Sthapit, P.; Gang, H.S.; Pyun, J.Y. Bluetooth-Based Indoor Positioning Using Machine Learning Algorithms. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Jeju, Republic of Korea, 24–26 June 2018; pp. 206–212. [Google Scholar] [CrossRef]
- Li, G.; Geng, E.; Ye, F.; Xu, Y.; Ji, Y.; Li, M.; Yu, H. Indoor Positioning Algorithm Based on the Improved RSSI Distance Model. Sensors 2018, 18, 2820. [Google Scholar] [CrossRef] [PubMed]
- Jain, C.; Sashank, G.V.S.; Markkandan, S. Low-Cost BLE-Based Indoor Localization Using RSSI Fingerprinting and Machine Learning. In Proceedings of the 2021 Sixth International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 25–27 March 2021; pp. 363–367. [Google Scholar] [CrossRef]
- Al Qathrady, M.; Helmy, A. Improving BLE Distance Estimation and Classification Using TX Power and Machine Learning: A Comparative Analysis. In Proceedings of the 20th ACM International Conference on Modelling, Analysis and Simulation of Wireless and Mobile Systems, Miami Beach, FL, USA, 21–25 November 2017; pp. 79–83. [Google Scholar] [CrossRef]
- Koutris, A.; Koukofikis, A.; Spathakis, K.; Goudos, S.K. Deep Learning-Based Indoor Localization Using Multi-View BLE Signal. Sensors 2022, 22, 2759. [Google Scholar] [CrossRef] [PubMed]
- Wymeersch, H.; Maranò, S.; Gifford, W.M.; Win, M.Z. A Machine Learning Approach to Ranging Error Mitigation for UWB Localization. IEEE Trans. Commun. 2012, 60, 1719–1728. [Google Scholar] [CrossRef]
- Sang, C.L.; Kim, J.H.; Kim, J.H.; Kim, J.H.; Kim, J.H. Identification of NLOS and Multi-Path Conditions in UWB Localization Using Machine Learning Methods. Appl. Sci. 2020, 10, 3980. [Google Scholar] [CrossRef]
- Krishnan, S.; Santos, R.X.M.; Yap, E.R.; Zin, M.T. Improving UWB-Based Indoor Positioning in Industrial Environments Through Machine Learning. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 18–21 November 2018; pp. 1484–1488. [Google Scholar] [CrossRef]
- Salamah, A.H.; Tamazin, M.; Sharkas, M.A.; Khedr, M. An Enhanced WiFi Indoor Localization System Based on Machine Learning. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Jolliffe, I.T. Principal Component Analysis for Special Types of Data; Springer: New York, NY, USA, 2002; pp. 338–372. [Google Scholar] [CrossRef]
- Cover, T.; Hart, P. Nearest Neighbor Pattern Classification. IEEE Trans. Inf. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Quinlan, J.R. Induction of Decision Trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Xue, J.; Liu, J.; Sheng, M.; Shi, Y.; Li, J. A WiFi Fingerprint-Based High-Adaptability Indoor Localization via Machine Learning. China Commun. 2020, 17, 247–259. [Google Scholar] [CrossRef]
- Sabanci, K.; Yigit, E.; Ustun, D.; Toktas, A.; Aslan, M.F. WiFi-Based Indoor Localization: Application and Comparison of Machine Learning Algorithms. In Proceedings of the 2018 XXIIIrd International Seminar/Workshop on Direct and Inverse Problems of Electromagnetic and Acoustic Wave Theory (DIPED), Tbilisi, Georgia, 24–27 September 2018; pp. 246–251. [Google Scholar] [CrossRef]
- Bach, F.R.; Jordan, M.I. Kernel Independent Component Analysis. J. Mach. Learn. Res. 2002, 3, 1–48. [Google Scholar]
- Tipping, M.E. Sparse Bayesian Learning and the Relevance Vector Machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Schmidt, R.O. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT—Estimation of Signal Parameters via Rotational Invariance Techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Yang, T.; Cabani, A.; Chafouk, H. A Survey of Recent Indoor Localization Scenarios and Methodologies. Sensors 2021, 21, 8086. [Google Scholar] [CrossRef]
- Hou, Y.; Yang, X.; Abbasi, Q.H. Efficient AoA-Based Wireless Indoor Localization for Hospital Outpatients Using Mobile Devices. Sensors 2018, 18, 3698. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.; Wang, S.; Zhu, Z. Angle-of-Arrival Estimation Using an Adaptive Machine Learning Framework. IEEE Commun. Lett. 2018, 23, 294–297. [Google Scholar] [CrossRef]
- Alteneiji, A.; Ahmad, U.; Poon, K.; Ali, N.; Almoosa, N. Angle of Arrival Estimation in Indoor Environment Using Machine Learning. In Proceedings of the 2021 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Toronto, ON, Canada, 12–17 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations Using RNN Encoder-Decoder for Statistical Machine Translation. arXiv 2014, arXiv:1406.1078. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Texas Instruments. BOOSTXL-AOA—SimpleLink Bluetooth Low Energy AoA BoosterPack Plug-In Module. Available online: https://www.digikey.kr/ko/products/detail/texas-instruments/BOOSTXL-AOA/9686130 (accessed on 20 August 2024).
- Texas Instruments. Company Overview. Available online: https://www.ti.com (accessed on 20 August 2024).
- NVIDIA. Jetson Nano Developer Kit. Available online: https://developer.nvidia.com/embedded/jetson-nano (accessed on 20 August 2024).
- Zhang, W.; Li, X.; Li, A.; Huang, X.; Wang, T.; Gao, H. SGRU: A High-Performance Structured Gated Recurrent Unit for Traffic Flow Prediction. In Proceedings of the 2023 IEEE 29th International Conference on Parallel and Distributed Systems (ICPADS), Danzhou, China, 17–21 December 2023; pp. 467–473. [Google Scholar] [CrossRef]
- Ravanelli, M.; Brakel, P.; Omologo, M.; Bengio, Y. Light Gated Recurrent Units for Speech Recognition. IEEE Trans. Emerg. Top. Comput. Intell. 2018, 2, 92–102. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Specification |
|---|---|
| CPU | Intel Xeon 4215, 64-bit, 8 cores, 16 threads |
| Memory | 384 GB (64 GB × 6) |
| GPU | NVIDIA Quadro RTX 8000 |
| GPU Memory | 48 GB |
| TensorFlow | 2.9.0 |
| CUDA | 11.2 |
| CuDNN | 8 |
| Class | Parameters | Configurations |
|---|---|---|
| Dataset | Total samples | 379,995 |
| No. of antenna | 6 antennas | |
| Antenna grouping | 2 groups of 3 | |
| Train:Val:Test | 7:1:2 | |
| Angle collection | 10-degree intervals | |
| Signal interval | 625 µs | |
| Preprocessing | Length/window | 100 |
| Input size | (100, 2) | |
| Min–max scaling | Yes | |
| Learning | Learning rate | 0.001 |
| Epoch | 15 | |
| Optimizer | Adam | |
| No. of GRU layers | 3 | |
| No. of dense layers | 7 | |
| Loss function | MSE | |
| Early stop | Yes | |
| Batch size | 32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koh, S.; Lee, J. Learning Approach for Angle Estimation Based on Characteristics of Phase Drift. Appl. Sci. 2025, 15, 3708. https://doi.org/10.3390/app15073708
Koh S, Lee J. Learning Approach for Angle Estimation Based on Characteristics of Phase Drift. Applied Sciences. 2025; 15(7):3708. https://doi.org/10.3390/app15073708
Chicago/Turabian StyleKoh, Seoyoung, and Jaeho Lee. 2025. "Learning Approach for Angle Estimation Based on Characteristics of Phase Drift" Applied Sciences 15, no. 7: 3708. https://doi.org/10.3390/app15073708
APA StyleKoh, S., & Lee, J. (2025). Learning Approach for Angle Estimation Based on Characteristics of Phase Drift. Applied Sciences, 15(7), 3708. https://doi.org/10.3390/app15073708