
Detection of Water Surface Using Canny and Otsu Threshold Methods with Machine Learning Algorithms on Google Earth Engine: A Case Study of Lake Van


Abstract
1. Introduction
- -
- Since Lake Van is the world’s largest soda lake and the largest lake in Turkey, it is very important to protect its unique habitat. In order to protect this situation, it is very important to know the boundaries and water surface area of the lake in order to take the necessary measures. When the literature on this subject was analyzed, no study on the determination of the boundaries and water surface area of Lake Van was found.
- -
- The validity of the Otsu thresholding method was investigated in order to eliminate the problem of double thresholding in the Canny edge detection algorithm in large water bodies such as Lake Van and to determine the appropriate threshold automatically.
- -
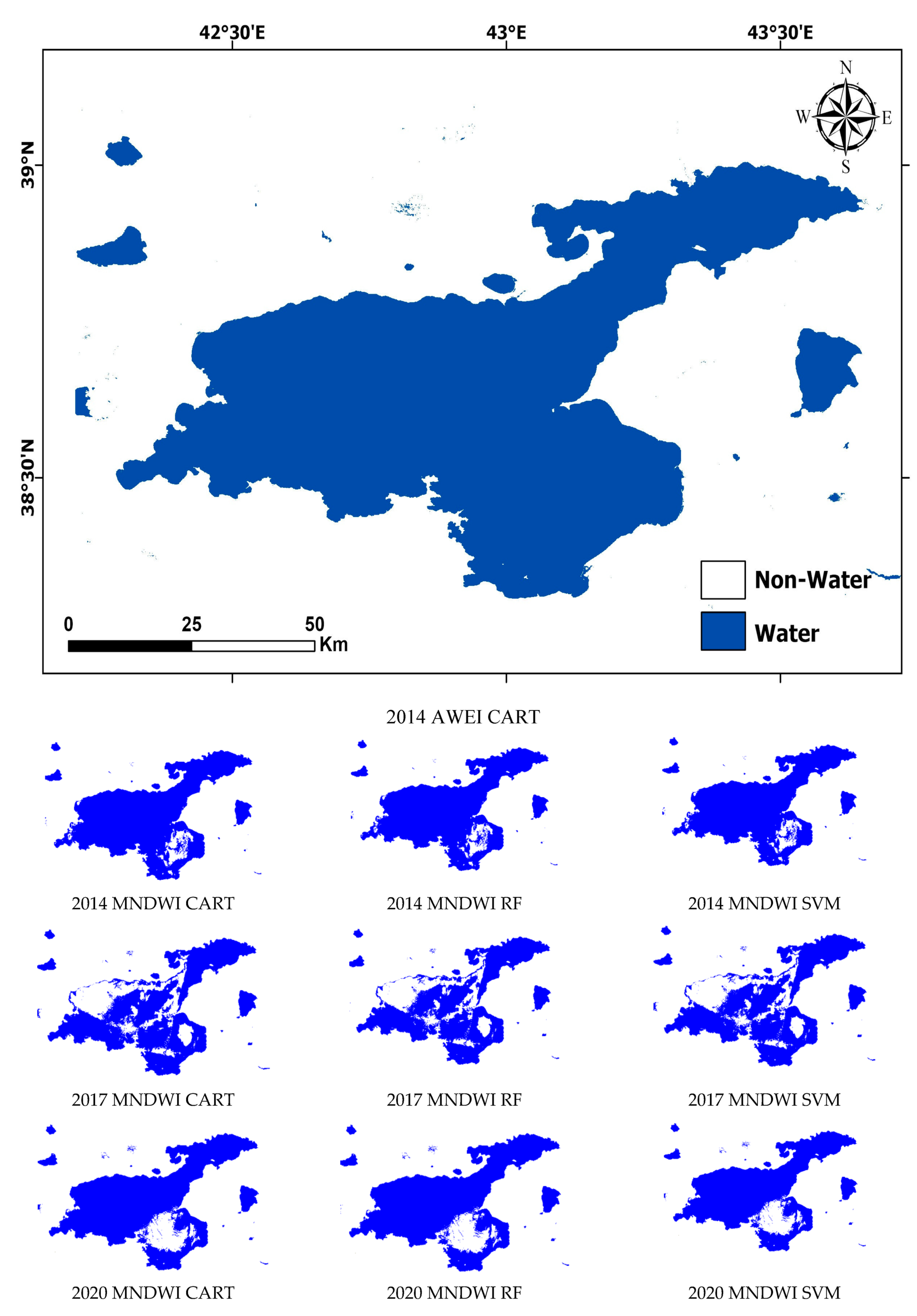
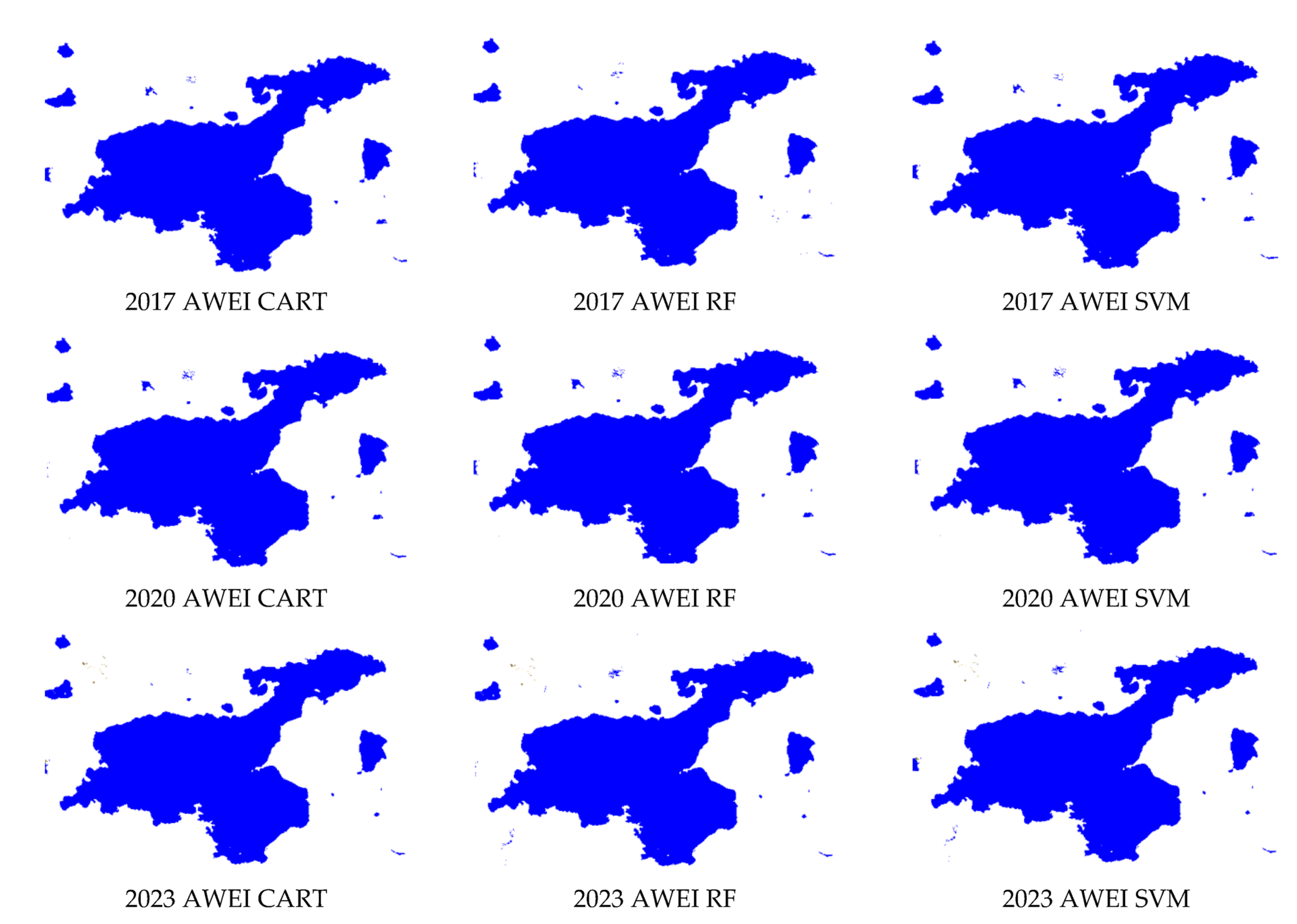
- In large water bodies such as Lake Van, the performances of the SVM, RF, and CART machine learning algorithms used in the study were compared by determining the boundaries and water surface areas of the lake on the GEE platform.
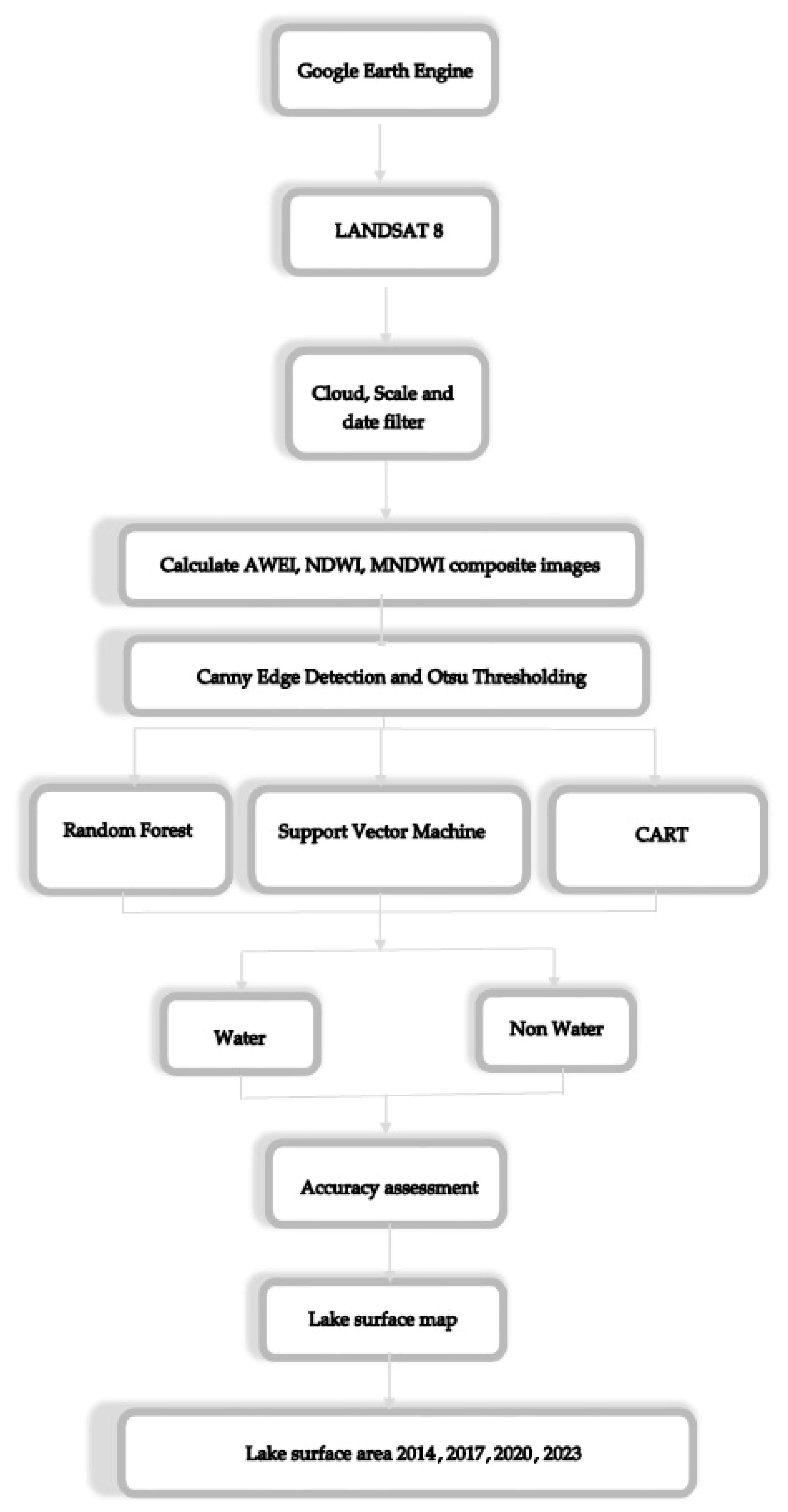
2. Materials and Methods
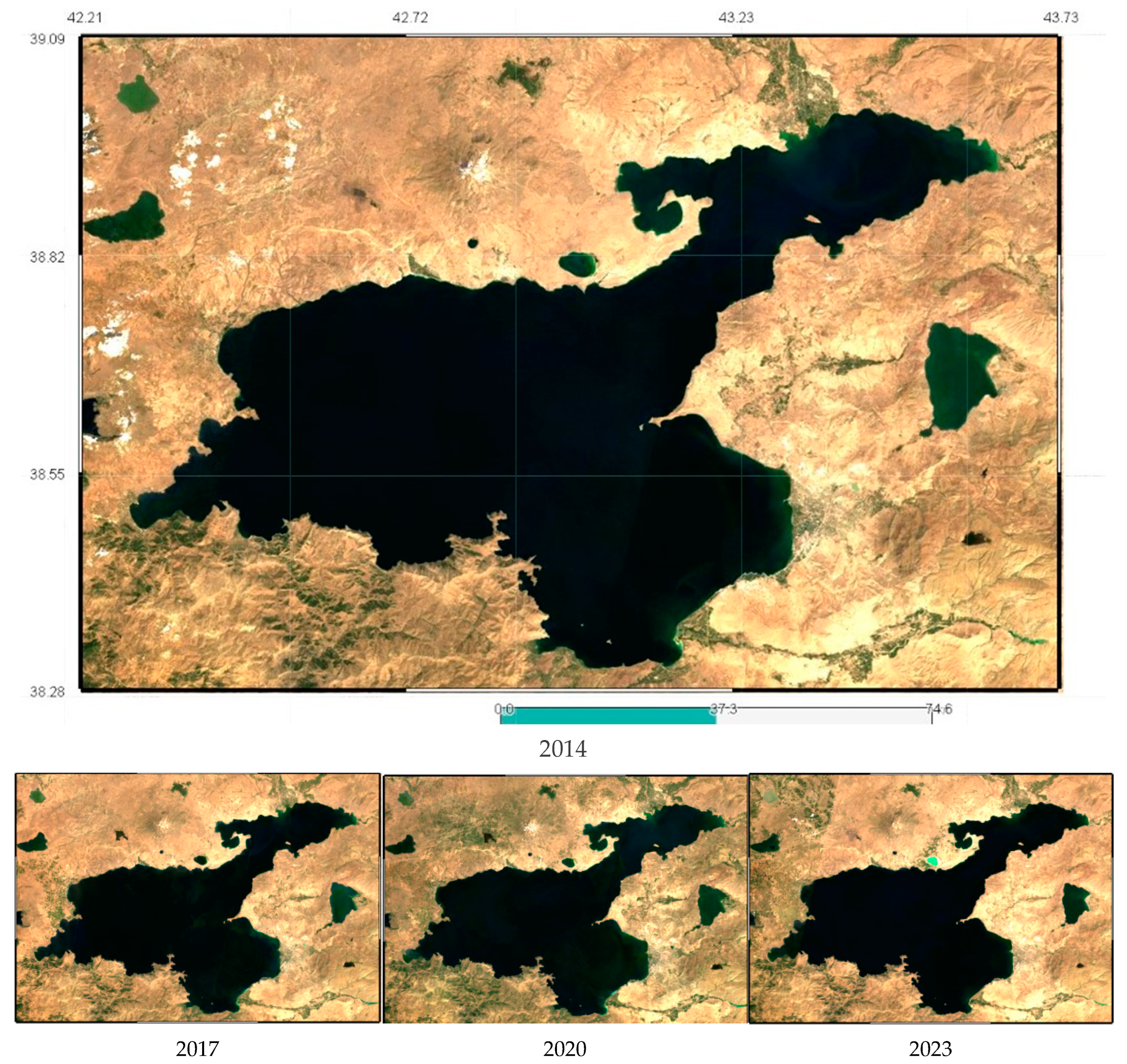
2.1. Study Area
2.2. Data
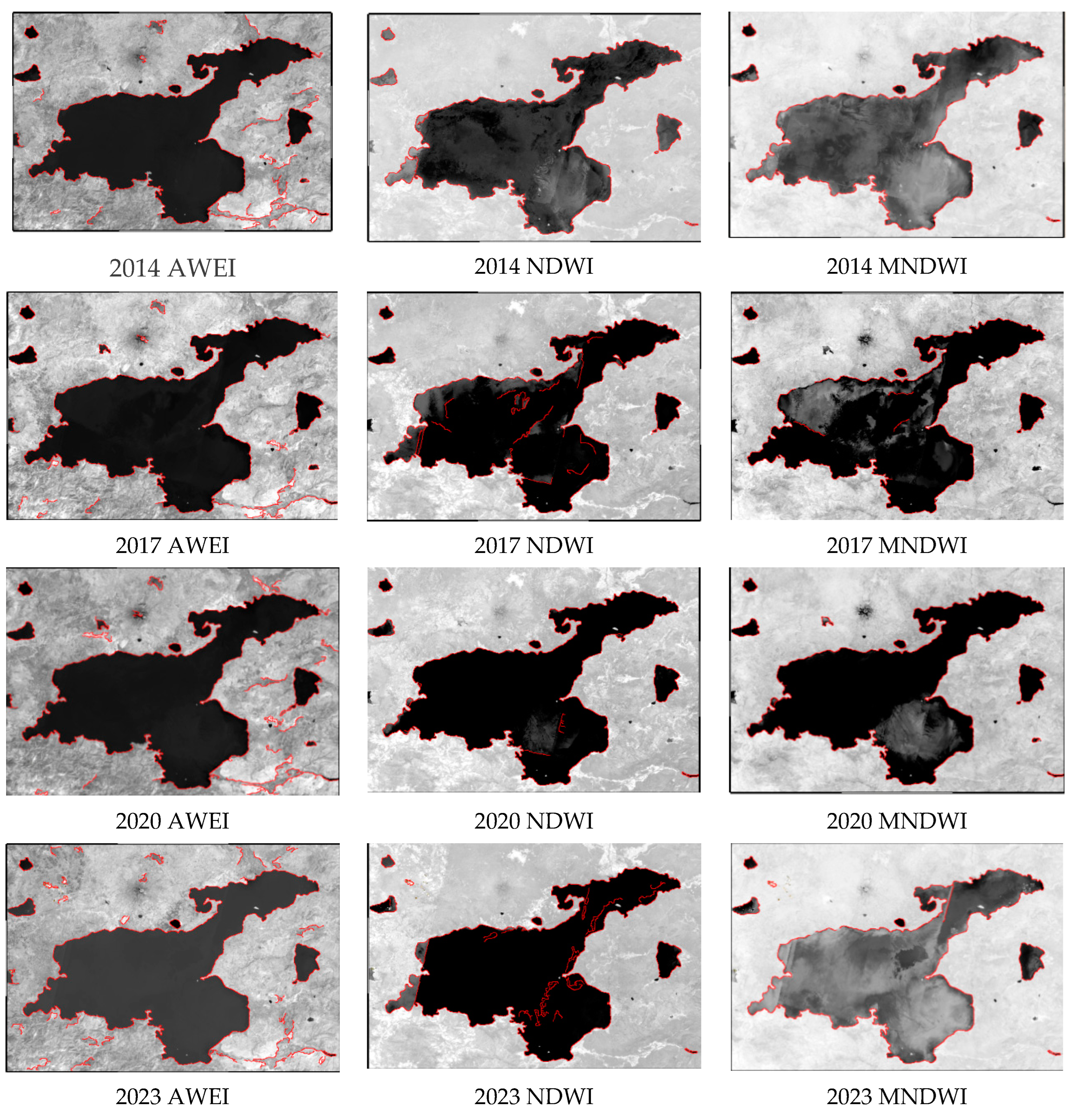
2.3. Canny Edge Detection
- -
- Finding edges with minimal error: This standard requires the detector to measure the signal-to-noise ratio and captures the true edge precisely.
- -
- Precise localization: This standard dictates that the operator must be as precise as feasible concerning the edge’s center.
- -
- A single response for a single edge: This criteria necessitates marking each edge point just once.
- 1.
- Applying a Gaussian filter to smooth the image: The image’s noise is removed.
- 2.
- Calculating the gradient’s intensity involves determining the gradient’s direction.
- 3.
- Non-maximum suppression: The goal of this stage is to remove erroneous edge detection reactions.
- 4.
- To identify possible edges, use double thresholds: This phase involves two threshold levels. Th > Tl for both the low threshold level, Tl, and the high threshold level, Th. If a point’s gradient value is greater than Th, it is regarded as an edge point. A point is not regarded as an edge point if the gradient value of that point is smaller than Tl. The region surrounding the edge points will be considered when determining the edge points for points bigger than Tl but smaller than Th.
2.4. Otsu Thresholding
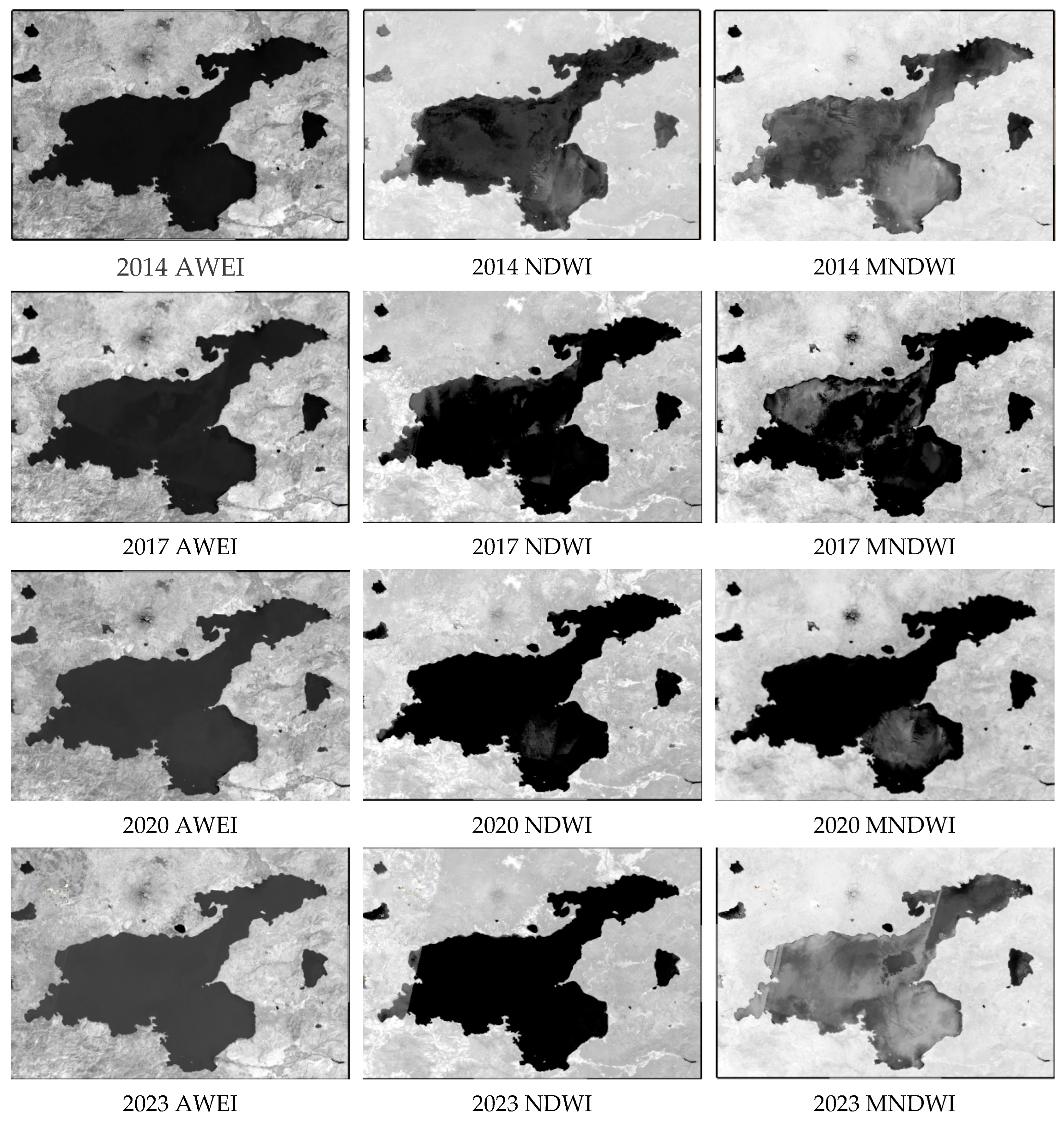
2.5. Spectral Indices
2.6. Machine Learning Algorithms
2.6.1. CART
2.6.2. Random Forest
2.6.3. Support Vector Machine
2.7. Accuracy Assessment
3. Results and Discussion
4. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, Y.; Dong, J.; Xiao, X.; Liu, R.; Zou, Z.; Zhao, G.; Ge, Q. Continuous monitoring of lake dynamics on the Mongolian Plateau using all available Landsat imagery and Google Earth Engine. Sci. Total Environ. 2019, 689, 366–380. [Google Scholar] [CrossRef] [PubMed]
- Tercan, E.; Atasever, U.H. Effectiveness of auto encoder for lake area extraction from high-resolution RGB imagery: An experimental study. Environ. Sci. Pollut. Res. 2021, 28, 31084–31096. [Google Scholar] [CrossRef] [PubMed]
- Shen, G.; Yang, X.; Jin, Y.; Xu, B.; Zhou, Q. Remote sensing and evaluation of the wetland ecological degradation process of the Zoige Plateau Wetland in China. Ecol. Indic. 2019, 104, 48–58. [Google Scholar] [CrossRef]
- Debanshi, S.; Pal, S. Wetland delineation simulation and prediction in deltaic landscape. Ecol. Indic. 2020, 108, 105757. [Google Scholar] [CrossRef]
- Akkuş, M.; Sarı, M.; EkmekÓi, F.G.; YoğurtÓuoğlu, B. The discovery of a microbialite-associated freshwater fish in the world’s largest saline soda lake, Lake Van (Turkey). ZoosystEvol 2021, 97, 181–189. [Google Scholar] [CrossRef]
- Danulat, E.; Kempe, S. Nitrogenous waste excretion and accumulation of urea and ammonia in Chalcalburnustarichi (Cyprinidae), endemic to the extremely alkaline Lake Van (Eastern Turkey). Fish Physiol. Biochem. 1992, 9, 377–386. [Google Scholar] [CrossRef]
- Elhaddad, H.; Sultan, M.; Yan, E.; Abdelmohsen, K.; Mohammad, A.T.; Badawy, A.; Hadi, K.; Hassan, S.; Mustafa, M. Optimization of floodwater redistribution from Lake Nasser could recharge Egypt’s aquifers and mitigate its excessive floods. Commun. Earth Environ. 2024, 5, 385. [Google Scholar] [CrossRef]
- Lakshmi, V. Enhancing human resilience against climate change: Assessment of hydroclimatic extremes and sea level rise impacts on the Eastern Shore of Virginia, United States. Sci. Total Environ. 2024, 947, 174289. [Google Scholar]
- Ghaffarian, S.; Kerle, N.; Filatova, T. Remote sensing-based proxies for urban disaster risk management and resilience: A review. Remote Sens. 2018, 10, 1760. [Google Scholar] [CrossRef]
- Avtar, R.; Komolafe, A.A.; Kouser, A.; Singh, D.; Yunus, A.P.; Dou, J.; Kumar, P.; Gupta, R.D.; Johnson, B.A.; Minh, H.V.T.; et al. Assessing sustainable development prospects through remote sensing: A review. Remote Sens. Appl. Soc. Environ. 2020, 20, 100402. [Google Scholar] [CrossRef]
- Peng, L.; Wu, H.; Li, Z. Spatial–temporal evolutions of ecological environment quality and ecological resilience pattern in the middle and lower reaches of the Yangtze River Economic Belt. Remote Sens. 2023, 15, 430. [Google Scholar] [CrossRef]
- Levin, E.; Beisekenov, N.; Wilson, M.; Sadenova, M.; Nabaweesi, R.; Nguyen, L. Empowering climate resilience: Leveraging cloud computing and big data for community Climate Change Impact Service (C3IS). Remote Sens. 2023, 15, 5160. [Google Scholar] [CrossRef]
- Zafeiropoulos, C.; Tzortzis, I.N.; Rallis, I.; Doulamis, A. Development of a Support System for Improved Resilience and Sustainable Urban Areas to Cope with Climate Change and Extreme Events Based on GEOSS and Advanced Modelling Tools. In Proceedings of the International Conference on Transdisciplinary Multispectral Modeling and Cooperation for the Preservation of Cultural Heritage, Athens, Greece, 22–23 March 2023; Springer Nature: Cham, Switzerland; pp. 364–374. [Google Scholar]
- Yilmaz, O.S.; Gulgen, F.; BalikSanli, F.; Ates, A.M. The performanc eanalysis of different water indices and algorithms using sentinel-2 and landsat-8 images in determining water surface: Demirkopru dam casestudy. Arab. J. Sci. Eng. 2023, 48, 7883–7903. [Google Scholar] [CrossRef]
- Nagaraj, R.; Kumar, L.S. Extraction of Surface Water Bodies using Optical Remote Sensing Images: A Review. Earth Sci. Inform. 2024, 17, 893–956. [Google Scholar] [CrossRef]
- Liu, S.; Wu, Y.; Zhang, G.; Lin, N.; Liu, Z. Comparing water indices for landsat data for automated surface water body extraction under complex ground background: A case study in Jilin Province. Remote Sens. 2023, 15, 1678. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, R.; Jia, M.; Cheng, L.; Zhao, C.; Li, H.; Wang, Z. Accurate and Rapid Extraction of Aquatic Vegetation in the China Side of the Amur River Basin Based on Landsat Imagery. Remote Sens. 2024, 16, 654. [Google Scholar] [CrossRef]
- Google Erath Engine. Available online: https://developers.google.com/earth-engine/guides (accessed on 24 February 2025).
- Yang, L.; Driscol, J.; Sarigai, S.; Wu, Q.; Chen, H.; Lippitt, C.D. Google Earth Engine and artificial intelligence (AI): A comprehensive review. Remote Sens. 2022, 14, 3253. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, M.; Tian, B.; Li, Z. Extraction of glacial lake outlines in Tibet Plateau using Landsat 8 imagery and Google Earth Engine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4002–4009. [Google Scholar] [CrossRef]
- Nguyen, U.N.; Pham, L.T.; Dang, T.D. An automatic water detection approach using Landsat 8 OLI and Google Earth Engine cloud computing to map lakes and reservoirs in New Zealand. Environ. Monit. Assess. 2019, 191, 235. [Google Scholar] [CrossRef]
- Karakus, P. Investigation of Meteorological Effects on Çivril Lake, Turkey, with Sentinel-2 Data on Google Earth Engine Platform. Sustainability 2023, 15, 13398. [Google Scholar] [CrossRef]
- McFeeters, S.K. Theuse of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Bochow, M.; Heim, B.; Küster, T.; Rogaß, C.; Bartsch, I.; Segl, K.; Reigber, S.; Kaufm, H. On the use of airborne imaging spectroscopy data for the automatic detection and delineation of surface water bodies. In Remote Sensing of Planet Earth; InTech: London, UK, 2012; pp. 1–22. [Google Scholar]
- Uzun, M. Analysis of Manyas Lake surface area and shoreline change over various periods with dsas tool. Türkiye Uzak. Algılama Derg. 2024, 6, 35–56. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Yılmaz, O.S. Automatic detection of water surfaces using K-means++ clustering algorithm with Landsat-9 and Sentinel-2 images on the Google Earth Engine Platform. Bilge Int. J. Sci. Technol. Res. 2023, 7, 105–111. [Google Scholar] [CrossRef]
- Donchyts, G.; Schellekens, J.; Winsemius, H.; Eisemann, E.; Van de Giesen, N. A 30 m Resolution Surface Water Mask Including Estimation of Positional and Thematic Differences Using Landsat 8, Srtm and Open Street Map: A Case Study in the Murray-Darling Basin, Australia. Remote Sens. 2016, 8, 386. [Google Scholar] [CrossRef]
- Sari, Y.; Prakoso, P.B.; Baskara, A.R. Road crack detection using support vector machine (SVM) and OTSU algorithm. In Proceedings of the 2019 6th International Conference on Electric Vehicular Technology (ICEVT), Bali, Indonesia, 18–21 November 2019; pp. 349–354. [Google Scholar]
- Zhu, D.; Zhou, C.; Zhu, Y.; Wang, T.; Zhang, C. Monitoring of supraglacial lake distribution and full-year changes using multisource time-series satellite imagery. Remote Sens. 2023, 15, 5726. [Google Scholar] [CrossRef]
- Elwan, M.; Amein, A.S.; Mousa, A.; Ahmed, A.M.; Bouallegue, B.; Eltanany, A.S. SAR image matching based on local feature detection and description using convolutional neural network. Secur. Commun. Netw. 2022, 2022, 5669069. [Google Scholar] [CrossRef]
- Yu, X.; Wang, Z.; Wang, Y.; Zhang, C. Edge detection of agricultural products based on morphologically improved canny algorithm. Math. Probl. Eng. 2021, 2021, 6664970. [Google Scholar] [CrossRef]
- Yang, P.; Song, W.; Zhao, X.; Zheng, R.; Qingge, L. An improved Otsu threshold segmentation algorithm. Int. J. Comput. Sci. Eng. 2020, 22, 146–153. [Google Scholar] [CrossRef]
- Fang, M.; Yue, G.; Yu, Q. The study on an application of otsu method in canny operator. In Proceedings of the 2009 International Symposium on Information Processing (ISIP 2009), San Francisco, CA, USA, 13–16 April 2009; Academy Publisher: Guwahati, India, 2009; p. 109. [Google Scholar]
- Kesikoglu, M.H.; Atasever, U.H.; Dadaser-Celik, F.; Ozkan, C. Performance of ANN, SVM and MLH techniques for land use/cover change detection at Sultan Marshes wetland, Turkey. Water Sci. Technol. 2019, 80, 466–477. [Google Scholar] [CrossRef] [PubMed]
- Acharya, T.D.; Subedi, A.; Lee, D.H. Evaluation of machine learning algorithms for surface water extraction in a Landsat 8 scene of Nepal. Sensors 2019, 19, 2769. [Google Scholar] [CrossRef] [PubMed]
- Tassi, A.; Vizzari, M. Object-oriented lulc classification in google earth engine combining snic, glcm, and machine learning algorithms. Remote Sens. 2020, 12, 3776. [Google Scholar] [CrossRef]
- Li, H.; Zech, J.; Ludwig, C.; Fendrich, S.; Shapiro, A.; Schultz, M.; Zipf, A. Automatic mapping of national surface water with Open Street Map and Sentinel-2 MSI data using deep learning. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102571. [Google Scholar]
- Karakuş, P. Object Based Classification in Google Earth Engine Combining SNIC and Machine Learning Methods (Case Study: Lake Köyceğiz). Turk. J. Remote Sens. GIS 2024, 5, 125–137. [Google Scholar] [CrossRef]
- Rajendiran, N.; Kumar, L.S. Pixel level feature extraction and machine learning classification for water body extraction. Arab. J. Sci. Eng. 2023, 48, 9905–9928. [Google Scholar] [CrossRef]
- Wu, Y.; Pan, J. Detecting Changes in Impervious Surfaces Using Multi-Sensor Satellite Imagery and Machine Learning Methodology in a Metropolitan Area. Remote Sens. 2023, 15, 5387. [Google Scholar] [CrossRef]
- Akosman, E.N.; Makineci, H.B. Sentinel-2A Verileriyle Trabzon İli 2019–2020 Yılları Arasında Ortaya Çıkan Sınıflandırma Farklarının Çeşitli Algoritmalarla Değerlendirilmesi. Türkiye Uzak. Algılama Derg. 2023, 5, 78–88. [Google Scholar]
- Cezayirlioğlu, C.; Çelik, R.; Matcı, D.K. Landsat Verileri ve Makine Öğrenme Algoritmaları ile Su Yüzeyi Değişiminin Belirlenmesi Ve Tahmini; Marmara Gölü Örneği. Türkiye Uzak. Algılama Derg. 2022, 4, 43–52. [Google Scholar]
- Mafanya, M.; Tsele, P.; Zengeya, T.; Ramoelo, A. An assessment of image classifiers for generating machine-learning training samples for mapping the invasive Campuloclinium macrocephalum (Less.) DC (pompom weed) using DESIS hyperspectral imagery. ISPRS J. Photogramm. Remote Sens. 2022, 185, 188–200. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, M.; Wei, J.; He, Y.; Niu, L.; Li, H.; Xu, G. Adaptive threshold model in google earth engine: A case study of Ulva prolifera extraction in the south yellow sea, China. Remote Sens. 2021, 13, 3240. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Kwiecien, O.; McCormack, J.; Pickarski, N.; Bontogniali, T.R.; Baldermann, A.; Yue, J.; Litt, T. So Far... The Best of Lake Van (No. EGU24-15977). In Proceedings of the Copernicus Meetings, Online, 11 October 2024. [Google Scholar]
- Coşkun, S. Van Gölü Kapalı Havzasında Yağışların Trend Analizi. Mühendislik Bilim. Tasarım Derg. 2020, 8, 521–532. [Google Scholar] [CrossRef]
- Çağatay, M.N.; Damcı, E.; Bayon, G.; Sarı, M. Microbialites on the northern shelf of Lake Van, eastern Türkiye#: Morphology, texture, stable isotope geochemistry and age. Sedimentology 2023, 71, 850–870. [Google Scholar]
- Stockhecke, M.; Sturm, M.; Brunner, I.; Schmincke, H.U.; Sumita, M.; Kipfer, R.; Anselmetti, F.S. Sedimentary evolution and environmental history of Lake Van (Turkey) over the past 600 000 years. Sedimentology 2014, 61, 1830–1861. [Google Scholar] [CrossRef]
- Litt, T.; Anselmetti, F.S.; Cagatay, M.N.; Kipfer, R.; Krastel, S.; Schmincke, H.U.; Sturm, M. A 500,000-year-long sediment archive drilled in eastern Anatolia. Eos. Trans. Am. Geophys. Union 2011, 92, 477–479. [Google Scholar] [CrossRef]
- Atıcı, A.A.; Sepil, A.; Fazıl, Ş.E.N. Van Gölü havzası tuzlu sularının su kalitesi özellikleri ve ağır metal kirlilik indeksinin belirlenmesi. Ege Üniversitesi Ziraat Fakültesi Derg. 2021, 58, 285–294. [Google Scholar] [CrossRef]
- T.C. Tarım ve Orman Bakanlığı Van İl Tarım v eOrman Müdürlüğü. Available online: https://van.tarimorman.gov.tr/ (accessed on 28 May 2024).
- Pacifici, F.; Longbotham, N.; Emery, W.J. The importance of physical quantities for the analysis of multitemporal and multiangular optical very high spatial resolution images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6241–6256. [Google Scholar] [CrossRef]
- Landsat Algorithms. Available online: https://developers.google.com/earth-engine/guides/landsat (accessed on 25 March 2024).
- Zhang, D.D.; Zhao, S. An improved edge detection algorithm based on canny operator. Appl. Mech. Mater. 2013, 347, 3541–3545. [Google Scholar] [CrossRef]
- Cao, J.; Chen, L.; Wang, M.; Tian, Y. Implementing a parallel image edge detection algorithm based on the Otsu-Canny operator on the Hadoop Platform. Comput. Intell. Neurosci. 2018, 3598284. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J. An improved Canny algorithm with adaptive threshold selection. MATEC Web Conf. 2015, 22, 01017. [Google Scholar] [CrossRef]
- Hu, X.; Wang, Y. Monitoring coastline variations in the Pearl River Estuary from 1978 to 2018 by integrating Canny edge detection and Otsu methods using long time series Landsat dataset. Catena 2022, 209, 105840. [Google Scholar] [CrossRef]
- You, N.; Han, L.; Liu, Y.; Zhu, D.; Zuo, X.; Song, W. Research on Wavelet Transform Modulus Maxima and OTSU in Edge Detection. Appl. Sci. 2023, 13, 4454. [Google Scholar] [CrossRef]
- Bouhennache, R.; Bouden, T.; Taleb-Ahmed, A.; Cheddad, A. A new spectral index for the extraction of built-up land features from Landsat 8 satellite imagery. Geocarto Int. 2019, 34, 1531–1551. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Y.; Zheng, R. Image edge detection method of combining wavelet lift with Canny operator. Procedia Eng. 2011, 15, 1335–1339. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees, 1st ed.; Chapman & Hall/CRC: Boca Raton, FL, USA, 1984. [Google Scholar]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Routledge: New York, NY, USA, 2017. [Google Scholar]
- Wang, R.; Guo, L.; Chen, B.; Yang, Y.; Zheng, H.; Deng, F.; Liu, J. Spatiotemporal variations and overflow risk analysis of the Salt Lake in the Hoh Xil Region using machine learning methods. Front. Earth Sci. 2023, 10, 1084540. [Google Scholar] [CrossRef]
- Huang, X.; Xie, C.; Fang, X.; Zhang, L. Combining pixel-and object-based machine learning for identification of water-body types from urban high-resolution remote-sensing imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2097–2110. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Chapelle, O.; Haffner, P.; Vapnik, V.N. Support vector machines for histogram-based image classification. IEEE Trans. Neural Netw. 1999, 10, 1055–1064. [Google Scholar] [CrossRef]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef]
- Yao, X.; Tham, L.; Dai, F. Landslide susceptibility mapping based on support vector machine: A case study on natural slopes of Hong Kong, China. Geomorphology 2008, 101, 572–582. [Google Scholar] [CrossRef]
- Sarp, G.; Ozcelik, M. Water body extraction and change detection using time series: A case study of lake burdur, Turkey. J. Taibah Univ. Sci. 2017, 11, 381–391. [Google Scholar] [CrossRef]
- Foody, G.M. On the compensation for chance agreement in image classification accuracy assessment. Photogramm. Eng. Remote Sens. 1992, 58, 1459–1460. [Google Scholar]
- Acharki, S. PlanetScope contributions compared to Sentinel-2, and Landsat-8 for LULC mapping. Remote Sens. Appl. Soc. Environ. 2022, 27, 100774. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Rijsbergen, C.V. Information Retrieval; Butterworth-Heinemann: Oxford, UK, 1979. [Google Scholar]
- Bangira, T.; Alfieri, S.M.; Menenti, M.; Van Niekerk, A. Comparing thresholding with machine learning classifiers for mapping complex water. Remote Sens. 2019, 11, 1351. [Google Scholar] [CrossRef]
- Cordeiro, M.C.; Martinez, J.M.; Peña-Luque, S. Automatic water detection from multidimensional hierarchical clustering for Sentinel-2 images and a comparison with Level 2A processors. Remote Sens. Environ. 2021, 253, 112209. [Google Scholar] [CrossRef]
- Rong, W.; Li, Z.; Zhang, W.; Sun, L. An improved Canny edge detection algorithm. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 577–582. [Google Scholar]
- Zalaoğlu, D.; Karakus, P. İşlenebilirlikte Kenar Belirleme Algoritmalarının Kullanılabilirliği. Osman. Korkut Ata Üniversitesi Fen Bilim. Enstitüsü Derg. 2022, 5, 707–719. [Google Scholar] [CrossRef]
- Zittis, G.; Almazroui, M.; Alpert, P.; Ciais, P.; Cramer, W.; Dahdal, Y.; Fnais, M.; Francis, D.; Hadjinicolaou, P.; Howari, F. Climate change and weather extremes in the Eastern Mediterranean and Middle East. Rev. Geophys. 2022, 60, e2021RG000762. [Google Scholar] [CrossRef]
- Hamzeh, N.H.; Shukurov, K.; Mohammadpour, K.; Kaskaoutis, D.G.; Saadatabadi, A.R.; Shahabi, H. A comprehensive investigation of the causes of drying and increasing saline dust in the Urmia Lake, northwest Iran, via ground and satellite observations, synoptic analysis and machine learning models. Ecol. Inform. 2023, 78, 102355. [Google Scholar] [CrossRef]
- Ji, L.; Zhang, L.; Wylie, B. Analysis of dynamic thresholds for the normalized difference water index. Photogramm. Eng. Remote Sens. 2019, 75, 1307–1317. [Google Scholar] [CrossRef]
- Worden, J.; de Beurs, K.M. Surface water detection in the Caucasus. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102159. [Google Scholar] [CrossRef]
- Zhang, Y.; Feng, L.; Li, J.; Luo, L.; Yin, Y.; Liu, M.; Li, Y. Seasonal–spatial variation and remote sensing of phytoplankton absorption in Lake Taihu, a large eutrophic and shallow lake in China. J. Plankton Res. 2010, 32, 1023–1037. [Google Scholar] [CrossRef]
- Tang, H.; Lu, S.; Baig, M.H.A.; Li, M.; Fang, C.; Wang, Y. Large-scale surface water mapping based on landsat and sentinel- 1 images. Water 2022, 14, 1454. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Multiband Index | AWEI | NDWI | MNDWI |
|---|---|---|---|
| Optimum thresholds | Optimum thresholds | Optimum thresholds | |
| 2014 | −0.7821 | 0.2029 | 0.0548 |
| 2017 | −0.7207 | 0.1412 | 0.0234 |
| 2020 | −0.7204 | 0.3170 | 0.0858 |
| 2023 | −0.8446 | 0.7809 | 0.0542 |
| 2014 | CART | RF | SVM | 2017 | CART | RF | SVM |
| NDWI | |||||||
| Producer accuracy | 1 | 1 | 1 | Producer accuracy | 0.98 | 0.98 | 0.99 |
| User accuracy | 1 | 1 | 1 | User accuracy | 0.97 | 0.97 | 0.98 |
| Overall accuracy | 1 | 1 | 1 | Overall accuracy | 0.93 | 0.94 | 0.98 |
| Kappa | 1 | 1 | 1 | Kappa | 0.94 | 0.96 | 0.98 |
| F score | 1 | 1 | 1 | F score | 0.96 | 0.97 | 0.99 |
| MNDWI | |||||||
| Producer accuracy | 0.98 | 0.98 | 0.99 | Producer accuracy | 0.94 | 0.86 | 0.95 |
| User accuracy | 0.97 | 0.98 | 0.98 | User accuracy | 0.92 | 0.81 | 0.93 |
| Overall accuracy | 0.94 | 0.97 | 0.97 | Overall accuracy | 0.87 | 0.67 | 0.87 |
| Kappa | 0.95 | 0.98 | 0.98 | Kappa | 0.87 | 0.70 | 0.89 |
| F score | 0.97 | 0.98 | 0.99 | F score | 0.91 | 0.89 | 0.93 |
| AWEI | |||||||
| Producer accuracy | 1 | 1 | 1 | Producer accuracy | 0.99 | 0.99 | 1 |
| User accuracy | 1 | 1 | 1 | User accuracy | 0.99 | 0.98 | 1 |
| Overall accuracy | 1 | 1 | 1 | Overall accuracy | 0.99 | 0.99 | 1 |
| Kappa | 1 | 1 | 1 | Kappa | 0.98 | 0.98 | 1 |
| F score | 1 | 1 | 1 | F score | 0.99 | 0.99 | 1 |
| 2020 | CART | RF | SVM | 2023 | CART | RF | SVM |
| NDWI | |||||||
| Producer accuracy | 0.99 | 0.99 | 1 | Producer accuracy | 0.93 | 0.93 | 0.94 |
| User accuracy | 0.98 | 0.98 | 1 | User accuracy | 0.91 | 0.90 | 0.91 |
| Overall accuracy | 0.97 | 0.98 | 1 | Overall accuracy | 0.81 | 0.80 | 0.83 |
| Kappa | 0.98 | 0.98 | 1 | Kappa | 0.84 | 0.83 | 0.86 |
| F score | 0.98 | 0.99 | 1 | F score | 0.90 | 0.94 | 0.95 |
| MNDWI | |||||||
| Producer accuracy | 0.97 | 0.95 | 0.96 | Producer accuracy | 0.92 | 0.92 | 0.95 |
| User accuracy | 0.97 | 0.94 | 0.93 | User accuracy | 0.89 | 0.88 | 0.93 |
| Overall accuracy | 0.96 | 0.90 | 0.90 | Overall accuracy | 0.82 | 0.83 | 0.89 |
| Kappa | 0.95 | 0.91 | 0.92 | Kappa | 0.85 | 0.83 | 0.91 |
| F score | 0.97 | 0.93 | 0.94 | F score | 0.90 | 0.90 | 0.94 |
| AWEI | |||||||
| Producer accuracy | 0.97 | 0.99 | 0.98 | Producer accuracy | 1 | 0.99 | 1 |
| User accuracy | 0.94 | 0.98 | 0.96 | User accuracy | 1 | 0.99 | 1 |
| Overall accuracy | 0.95 | 0.99 | 0.97 | Overall accuracy | 1 | 0.98 | 1 |
| Kappa | 0.95 | 0.98 | 0.97 | Kappa | 1 | 0.98 | 1 |
| F score | 0.98 | 0.99 | 0.99 | F score | 1 | 0.99 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karakus, P. Detection of Water Surface Using Canny and Otsu Threshold Methods with Machine Learning Algorithms on Google Earth Engine: A Case Study of Lake Van. Appl. Sci. 2025, 15, 2903. https://doi.org/10.3390/app15062903
Karakus P. Detection of Water Surface Using Canny and Otsu Threshold Methods with Machine Learning Algorithms on Google Earth Engine: A Case Study of Lake Van. Applied Sciences. 2025; 15(6):2903. https://doi.org/10.3390/app15062903
Chicago/Turabian StyleKarakus, Pinar. 2025. "Detection of Water Surface Using Canny and Otsu Threshold Methods with Machine Learning Algorithms on Google Earth Engine: A Case Study of Lake Van" Applied Sciences 15, no. 6: 2903. https://doi.org/10.3390/app15062903
APA StyleKarakus, P. (2025). Detection of Water Surface Using Canny and Otsu Threshold Methods with Machine Learning Algorithms on Google Earth Engine: A Case Study of Lake Van. Applied Sciences, 15(6), 2903. https://doi.org/10.3390/app15062903