
Mechanical Performance Enhancement of Self-Decoupling Magnetorheological Damper Enabled by Double-Graded High-Performance Magnetorheological Fluid

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
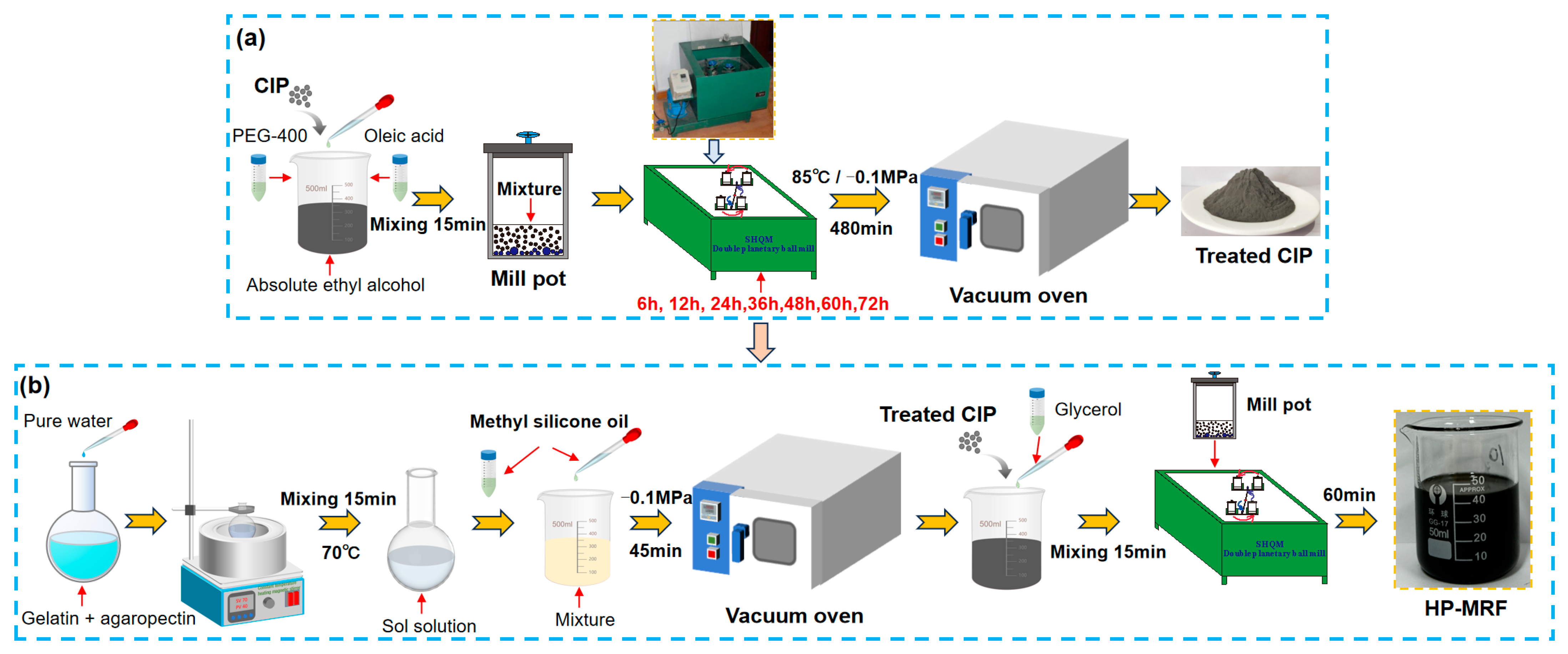
2.2. Preparation Process and Characterization
- (1)
- CIPs (initial particle size: 3.5 µm), surfactants such as PEG-400 and oleic acid, and an absolute ethyl alcohol dispersion medium were measured in proportion and placed in a beaker, followed by mixing with an electric stirrer for 15 min.
- (2)
- The amalgamation was transferred into a milling pot. Steel balls of varying sizes, although with identical diameters and numerical ratios, were subsequently introduced into the mill pots.
- (3)
- The mill pots were firmly positioned in the SHQM double planetary ball mill, which operated at a constant rotational speed. Subsequently, ball milling was conducted for durations of 6, 12, 24, 36, 48, 60, and 72 h for the different CIP samples with various particle sizes.
- (4)
- The ball mill pots containing the mixture post ball milling were placed in a vacuum oven at 85 °C for drying at a vacuum pressure of −0.1 MPa for a duration of 480 min to eliminate the absolute ethyl alcohol, resulting in the acquisition of the treated CIPs after drying and cooling.
- (1)
- The measured quantities of gelatin and agaropectin were combined with purified water at 70 °C in a flask for 15 min to create a sol solution.
- (2)
- Methyl silicone oil was weighed and added to the sol solution, which was thoroughly mixed before being transferred to a vacuum oven for decompression at −0.1 MPa for 45 min.
- (3)
- The modified CIPs and glycerol were weighed and incorporated into the mixture following vacuum decompression and then mixed for 15 min.
- (4)
- The mixture was placed in the mill pots to achieve uniform dispersion for 60 min in the double planetary ball mill, resulting in the acquisition of HP-MRF samples.
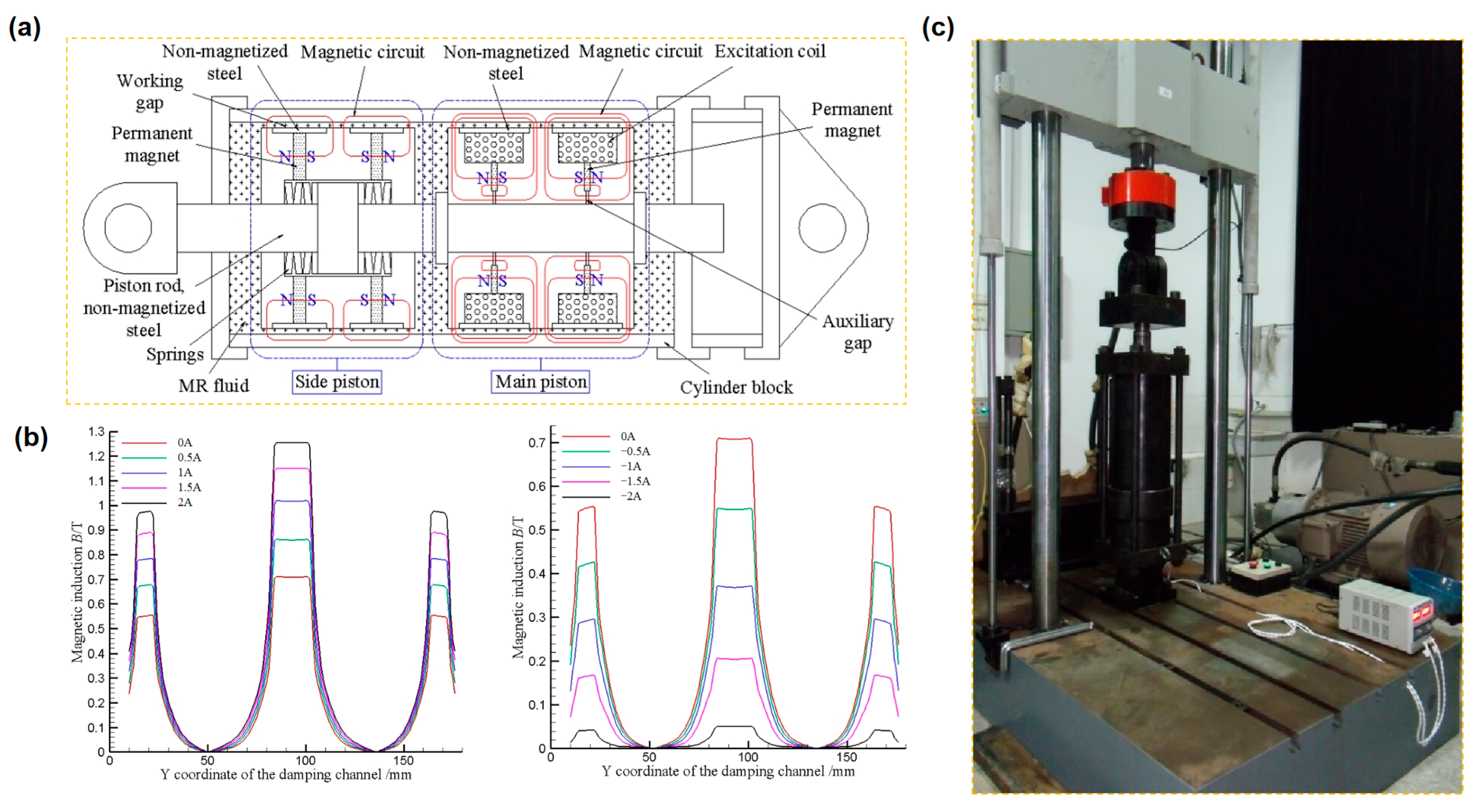
2.3. Properties of Self-Decoupling MR Dampers
3. Results and Discussion
3.1. Rheological Properties of the HP-MRFs
3.2. Dynamical Mechanical Properties of the Self-Decoupling MR Damper
4. Conclusions
- (1)
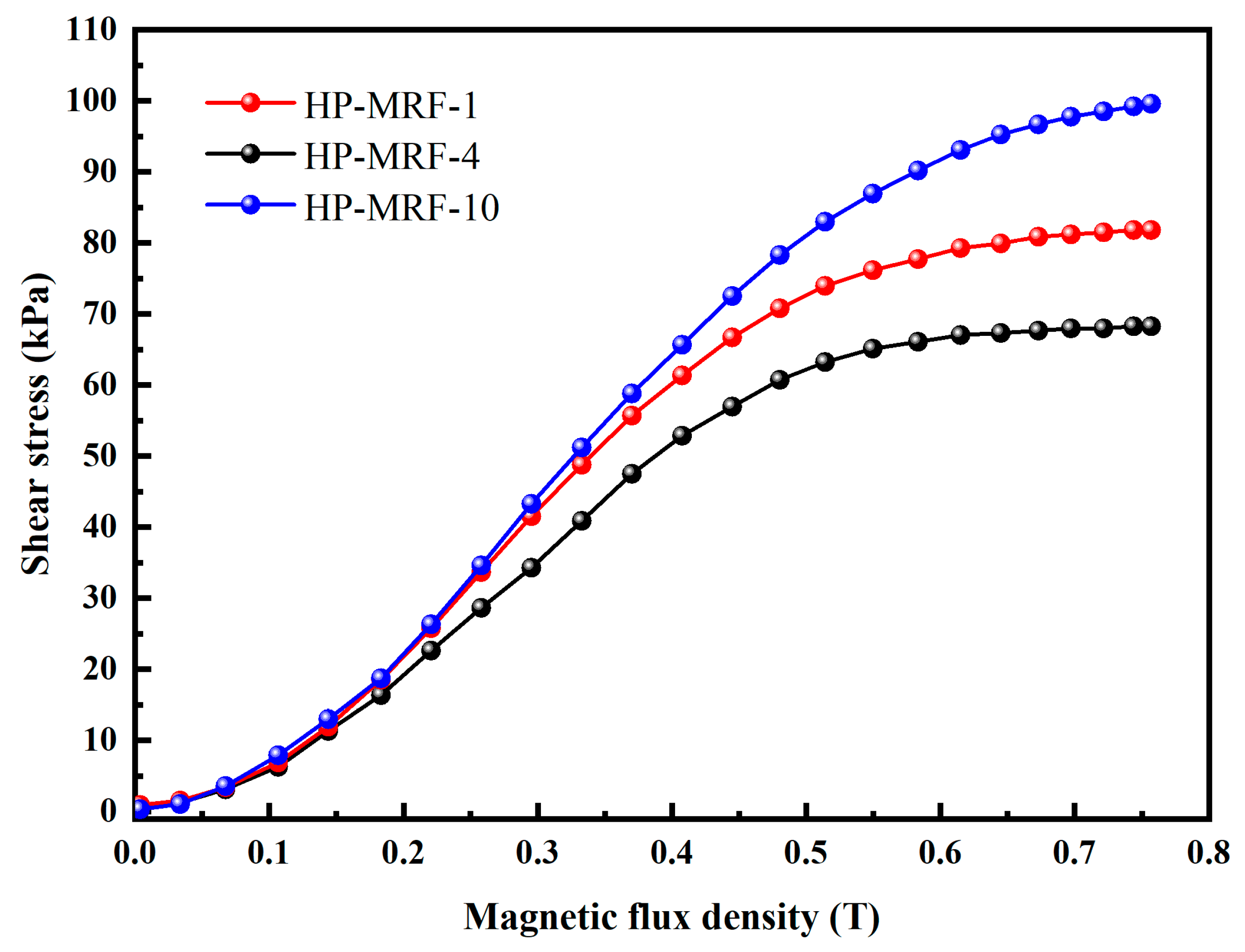
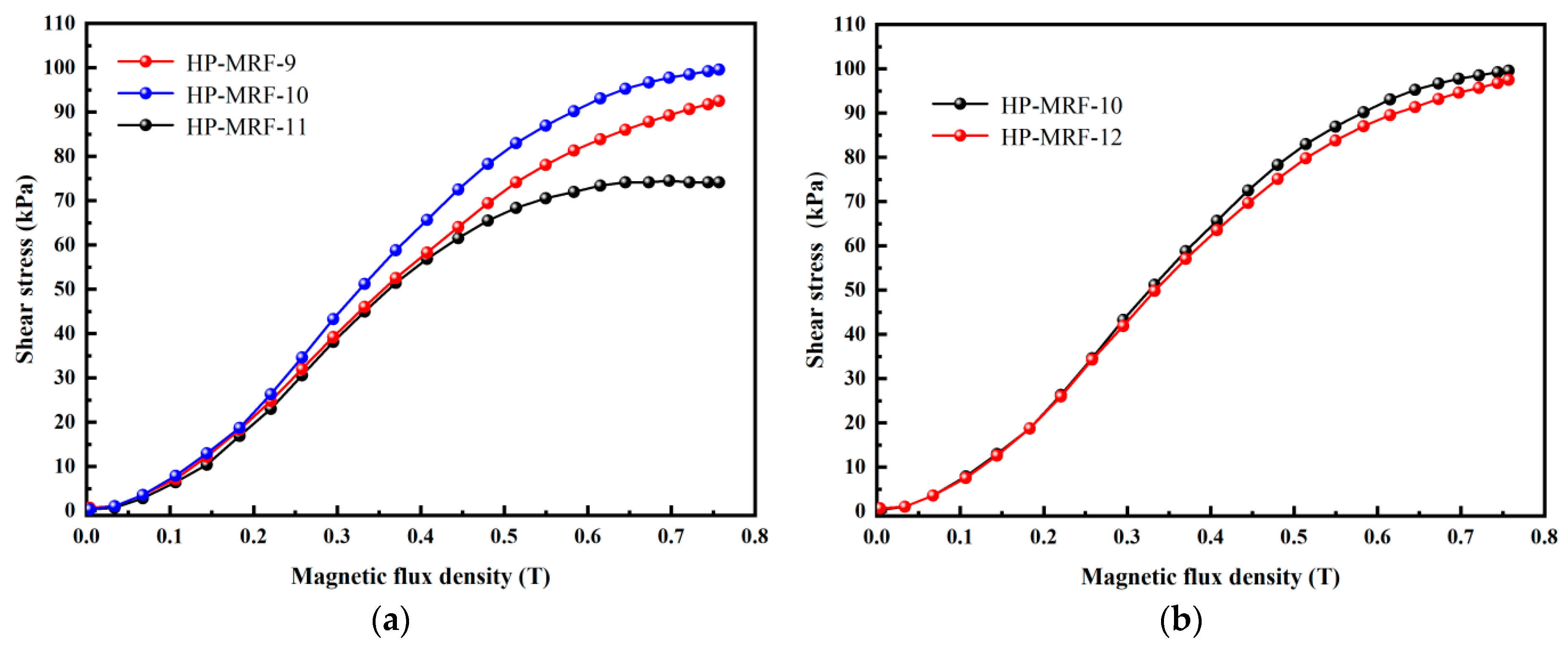
- In the case of HP-MRFs featuring single-graded CIPs, it is observed that the shear stress across all samples rises in conjunction with an increase in magnetic flux density. Additionally, the shear yield strength exhibits a decline from 81.8 kPa to 45 kPa as the particle size is progressively reduced. In the case of HP-MRFs featuring double-graded CIPs, the shear yield strength of HP-MRF-10 can reach 99.6 kPa. This suggests that an optimal combination of particle sizes effectively contributes to enhancing the shear yield strength of the HP-MRF.
- (2)
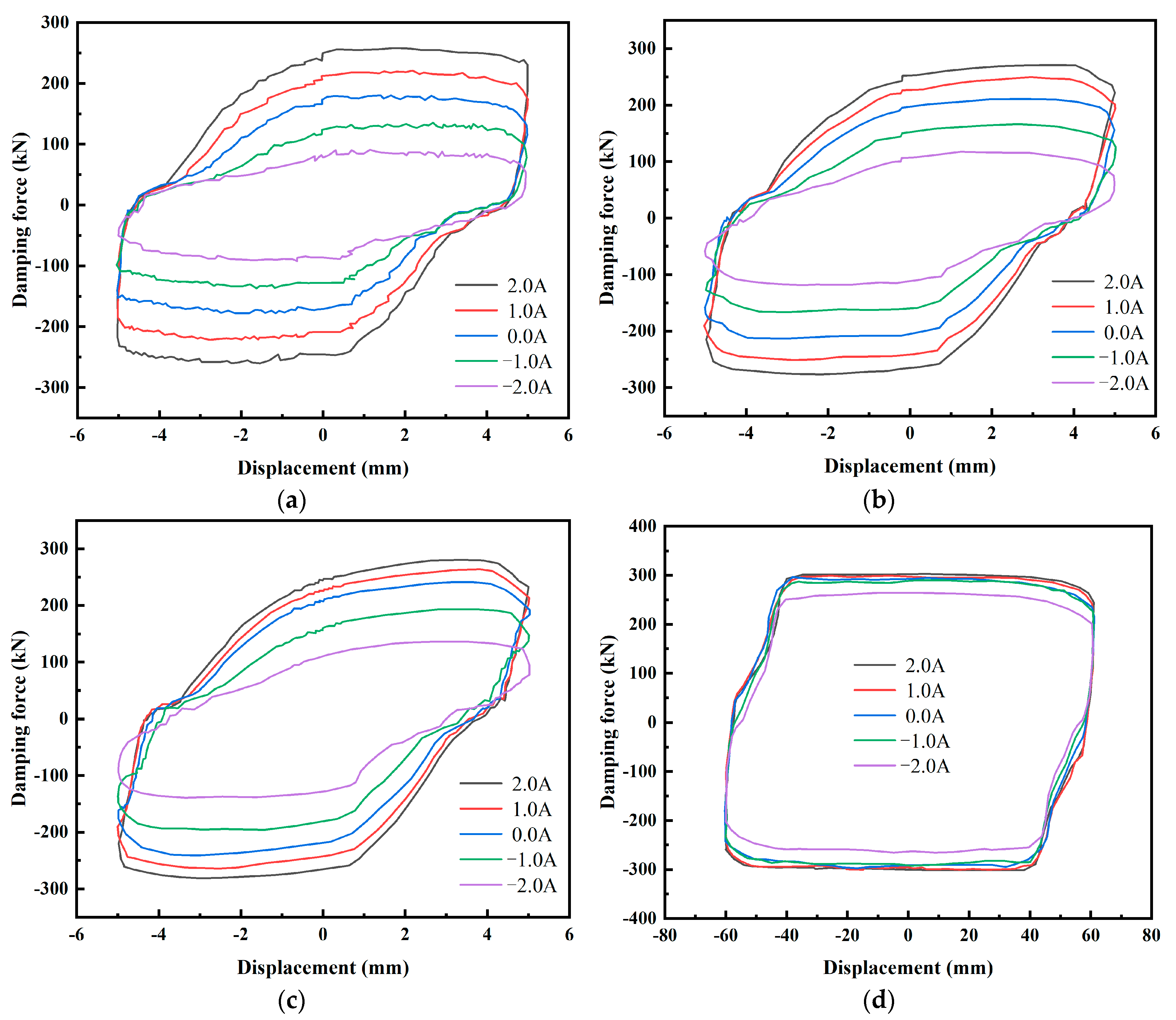
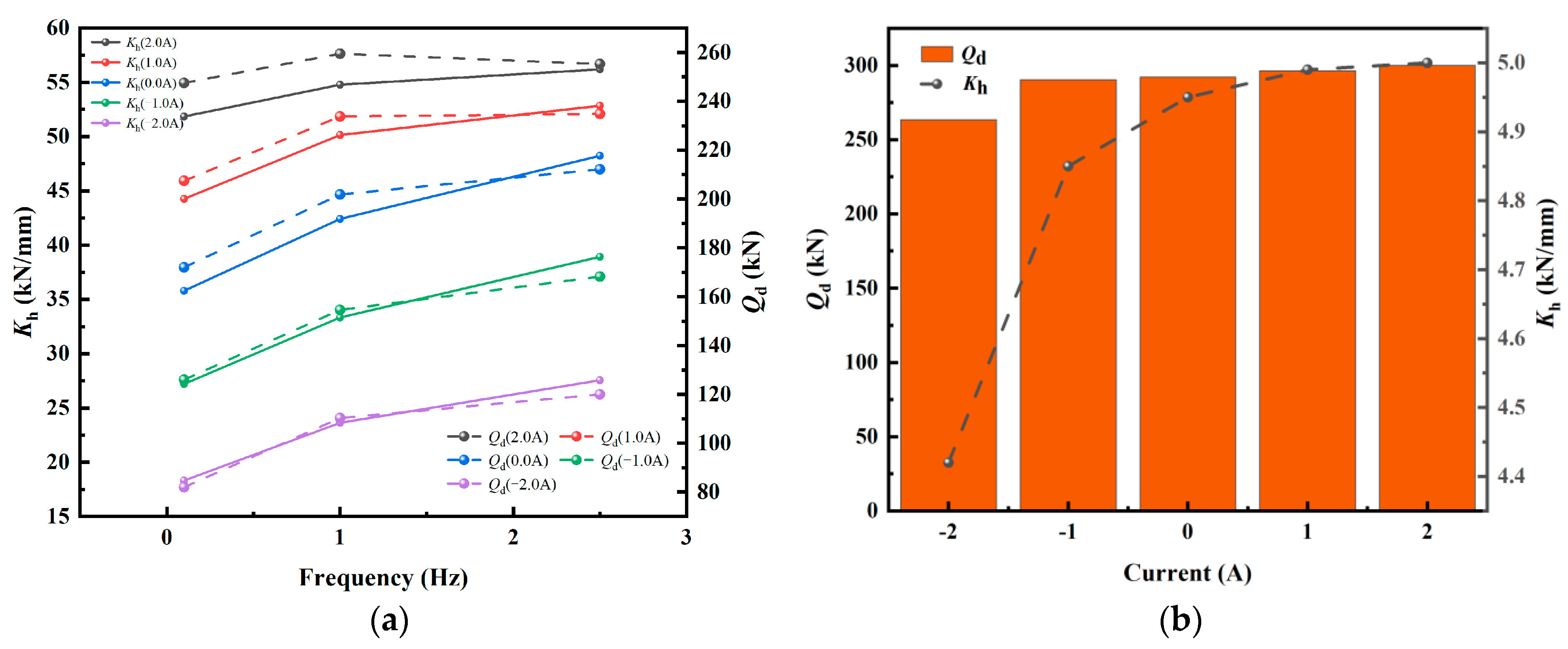
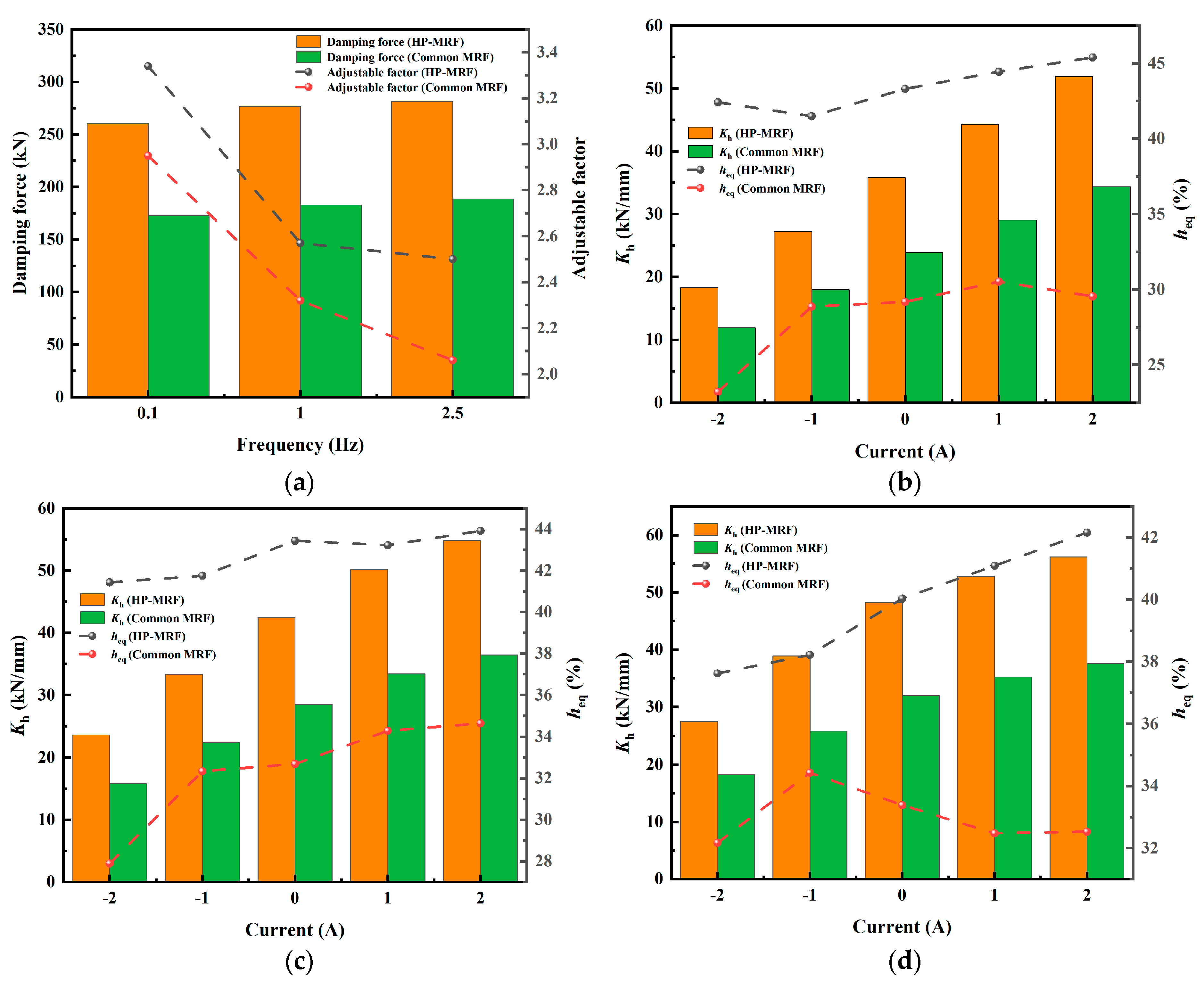
- The self-decoupling MR damper can achieve a maximum damping force of 281.5 kN at a small displacement of 5 mm, with an applied frequency of 2.5 Hz and an input current of 2.0 A. Additionally, the highest factor of adjustability of the damping force for the self-decoupling MR damper reaches 3.34 when the current ranges from −2.0 A to 2.0 A, with an applied frequency of 0.1 Hz. Furthermore, the self-decoupling MR damper exhibits a maximum damping force of 300 kN under a large displacement of 60 mm, which aligns with the measurement limit of the testing apparatus. The values of the calculated dynamic parameters, such as equivalent stiffness Kh and yield force Qd, can be enhanced by both the input current and the applied frequency.
- (3)
- Compared to the prior investigation of a self-decoupling MR damper utilizing a common MRF, the damping force may be increased by a maximum of 93.9 kN, and the adjustable range can also be enlarged. Furthermore, the computed dynamic parameters, including Kh and the equivalent damping ratio heq, are improved, indicating the energy consumption capacity of the self-decoupling MR damper is enhanced with the HP-MRF.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Han, W.J.; Wang, G.P.; Yang, F.F. Magnetite/copolymer nanosphere added soft-magnetic carbonyl iron based magnetorheological fluid and its damping performance. IEEE Trans. Magn. 2023, 59, 1–5. [Google Scholar]
- Aralikatti, S.S.; Puneet, N.P.; Kumar, H. Determining the optimal composition of magnetorheological fluid for a short-stroke magnetorheological damper. Sadhana 2023, 48, 1–17. [Google Scholar] [CrossRef]
- Moreno-Mateos, M.A.; Danas, K.; Garcia-Gonzalez, D. Influence of magnetic boundary conditions on the quantitative modelling of magnetorheological elastomers. Mech. Mater. 2023, 184, 104742. [Google Scholar] [CrossRef]
- Zhang, L.Y.; Luo, Y.P.; Ren, H.J.; Wang, Y.; Gu, Z. Microscopic modeling of magnetorheological fluids containing spherical and ellipsoidal ferromagnetic particles. J. Magn. Magn. Mater. 2023, 586, 171204. [Google Scholar] [CrossRef]
- Xin, D.K.; Nie, S.L.; Ji, H.; Fang-long, Y. Characteristics, optimal design, and performance analyses of MRF damper. Shock. Vib. 2018, 2018, 6454932. [Google Scholar]
- Kariganaur, A.K.; Kumar, H.; Arun, M. Effect of temperature on sedimentation stability and flow characteristics of magnetorheological fluids with damper as the performance analyser. J. Magn. Magn. Mater. 2022, 555, 169342. [Google Scholar] [CrossRef]
- Desai, R.M.; Acharya, S.; Jamadar, M.-E.; Kumar, H.; Joladarashi, S.; Sekaran, S.R. Synthesis of magnetorheological fluid and its application in a twin-tube valve mode automotive damper. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2020, 234, 1001–1016. [Google Scholar] [CrossRef]
- Liu, X.H.; Hu, H.N.; Wang, J.H.; Wu, Y.; Xu, B.; Pu, M.L. Effect of nano-Fe3O4 on normal force of magnetorheological Fluid. Mater. Sci. Eng. Technol. 2022, 53, 698–704. [Google Scholar] [CrossRef]
- Ruan, X.H.; Xuan, S.H.; Zhao, J.; Bian, H.; Gong, X. Mechanical performance of a novel magnetorheological fluid damper based on squeeze-valve bi-mode of MRF. Smart Mater. Struct. 2020, 29, 055018. [Google Scholar] [CrossRef]
- Nie, S.L.; Xin, D.K.; Ji, H.; Yin, F.L. Optimization and performance analysis of magnetorheological fluid damper considering different piston configurations. J. Intell. Mater. Syst. Struct. 2019, 30, 764–777. [Google Scholar] [CrossRef]
- Dong, L.L.; Zhao, R.G.; Luo, B.M.; Han, Y. Design of a new damper based on magnetorheological fluids. Int. J. Appl. Electromagn. Mech. 2019, 59, 357–366. [Google Scholar] [CrossRef]
- Wang, C.L.; Wu, L.J.; Wei, X.Q.; Zeng, Q.L. New magneto-inducible magnetorheological damper. J. Vib. Shock. 2024, 43, 248–259. [Google Scholar]
- Zhao, J.; Gao, N.; Li, X.P.; Lei, B.B.; Zhao, Y. Experimental and calculation model analysis on hysteresis properties of magnetorheological damper. J. Zhengzhou Univ. 2023, 44, 91–98. [Google Scholar]
- Cha, Y.-J.; Agrawal, A.K.; Phillips, B.M.; Spencer, B.F. Direct performance-based design with 200kN MR dampers using multi-objective cost effective optimization for steel MRFs. Eng. Struct. 2014, 71, 60–72. [Google Scholar] [CrossRef]
- Yu, G.J.; Zhu, S.J.; Du, C.B.; Wang, L.Y.; Huang, J.C. Design and Performance Test of a Magnetic Rate Controlled Stage Damper. Front. Mater. 2021, 8, 640316. [Google Scholar] [CrossRef]
- Archakam, P.K.; Muthuswamy, S. Modelling and simulation of four-stage collision energy absorption system based on magneto rheological absorber. Int. J. Mech. Mater. Des. 2022, 19, 49–72. [Google Scholar] [CrossRef]
- Li, G.; Gan, Y.; Liu, Q.; Xu, H.; Chen, D.; Zhong, L.; Deng, J.; Hu, G. Performance analysis of vehicle magnetorheological semi-active air suspension based on S-QFSMC control. Front. Mater. 2024, 11, 1358319. [Google Scholar] [CrossRef]
- Wang, C.L.; Zhang, J.W.; Liu, G.M.; Shang, H.; Wei, X. Design and performance analysis of a double-outlet-rod magnetorheological damper for impact load. Machines 2022, 10, 1099. [Google Scholar] [CrossRef]
- Yarali, E.; Mohammadi, A.; Mafakheri, S.; Baghani, M.; Adibi, H. Mathematical modeling and experimental evaluation of a prototype double-tube Magnetorheological damper. SN Appl. Sci. 2019, 1, 1341. [Google Scholar] [CrossRef]
- Li, J.Q.; Qin, C.G.; Guo, S.J.; Wang, J. Magnetic circuit design and performance analysis of a rotary magnetorheological damper with new structure. In Proceedings of the 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 524–529. [Google Scholar]
- Zhao, W.; Li, B.; Tian, W.; Liu, P.; Liao, W. Magnetorheological elastomer absorber-based chatter suppression in robotic milling. Robot. Comput. Manuf. 2024, 88, 102740. [Google Scholar] [CrossRef]
- Gurubasavaraju, T.M.; Muralidhar Singh, M. Magnetohydrodynamics analysis of magnetorheological fluid damper. J. Mech. Eng. Sci. 2023, 17, 9453–9462. [Google Scholar]
- Yang, X.L.; Zhu, J.H.; Song, Y.Y.; Li, Y. Design and experimental research of stepped bypass magnetorheological damper. J. Intell. Mater. Syst. Struct. 2023, 34, 1527–1547. [Google Scholar] [CrossRef]
- Wang, Y.J.; Wang, M.; Gao, P.X.; Yu, T.; Xi, J. Discrete fiber skeleton strengthened magnetorheological grease and a novel H-B model based on fiber parameters. AIP Adv. 2024, 14, 035212. [Google Scholar] [CrossRef]
- Ma, T.; Bi, F.; Wang, X.; Tian, C.; Lin, J.; Wang, J.; Pang, G. Optimized Fuzzy Skyhook Control for Semi-Active Vehicle Suspension with New Inverse Model of Magnetorheological Fluid Damper. Energies 2021, 14, 1674. [Google Scholar] [CrossRef]
- Zhao, D.; Zhao, J.B.; Zhao, Z.H.; Liu, Y.; Liu, S.; Wang, S. Design and experimental study of the porous foam metal magnetorheological fluid damper based on built-in multi-pole magnetic core. J. Intell. Mater. Syst. Struct. 2020, 31, 687–703. [Google Scholar] [CrossRef]
- Yan, W.; Huina, H.; Wang, X.; Xu, B.; He, Y.; Liu, X. Semi-active control of metal foam magnetorheological damper. Mater. Sci. Eng. Technol. 2021, 52, 1355–1362. [Google Scholar] [CrossRef]
- Ansari, M.A.; Meher, P.K.; Bisoi, A.; Biswas, A. Augmentation of damping force by modifying the geometrical shape of the MR damper. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 1–13. [Google Scholar] [CrossRef]
- Tan, A.S.; Sattel, T.; Subianto, R. A Novel Design Concept of a Magnetorheological Fluid-Based Damper Utilizing the Porous Medium for Implementation in Small-Scale Applications. Fluids 2023, 8, 203. [Google Scholar] [CrossRef]
- Hu, D.; Long, H.T.; Lu, J.B.; Liang, W.; Li, H.; Yan, Q. Preparation and performance study of microporous magnetorheological elastomer polishing pad. Mater. Today Commun. 2024, 41, 110980. [Google Scholar]
- Xu, C.; Peng, X.; Hu, H.; Liu, J.; Li, H.; Luo, T.; Lai, T. Nano-Precision Processing of NiP Coating by Magnetorheological Finishing. Nanomaterials 2023, 13, 2118. [Google Scholar] [CrossRef]
- Sarath, S.; Paul, P.S.; Lawrance, G. Characterization and performance analysis of magnetorheological foam damper for vibration control during boring process. Multiscale Multidiscip. Model. Exp. Des. 2023, 7, 837–854. [Google Scholar] [CrossRef]
- Chen, S.; Weng, Y.; Yao, B. Material removal model for magnetorheological polishing considering shear thinning and experimental verification. Mater. Today Commun. 2024, 38, 108475. [Google Scholar] [CrossRef]
- Bi, C.; Ji, A.; Bi, E.; Wang, H.; Zhu, W.; Lin, W. Investigation on roller-type ultrasonic assisted magnetorheological finishing for biomedical small and complex surface of titanium alloy. Mater. Today Commun. 2024, 38, 107702. [Google Scholar] [CrossRef]
- Chen, W.Q.; Du, C.B.; Wan, F.X. Effect of surfactant and thixotropic agent on the sedimentation stability of magneto-rheological fluid. J. Magn. Mater. Devices 2010, 41, 55–57+65. [Google Scholar]
- Yu, G.; Du, C.; Sun, T. Thermodynamic Behaviors of a Kind of Self-Decoupling Magnetorheological Damper. Shock. Vib. 2015, 2015, 502747. [Google Scholar] [CrossRef]
- Jolly, M.R.; Carlson, J.D.; Muñoz, B.C. A model of the behaviour of magnetorheological materials. Smart Mater. Struct. 1996, 5, 607–614. [Google Scholar] [CrossRef]
- Shen, Y.; Golnaraghi, M.F.; Heppler, G.R. Experimental Research and Modeling of Magnetorheological Elastomers. J. Intell. Mater. Syst. Struct. 2004, 15, 27–35. [Google Scholar] [CrossRef]
- Available online: https://www.lord.com (accessed on 2 June 2025).
- Han, M.; Liu, X.H.; Du, H.K.; Jiang, J.W.; Yang, J.C. Experimental research on shearing properties of small lead-core rubber bearings. J. Vib. Eng. 2024, 37, 326–335. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | CIP Gradation | Sample | CIP Gradation |
|---|---|---|---|
| HP-MRF-1 | 100% not milled | HP-MRF-7 | 100% milled for 60 h |
| HP-MRF-2 | 100% milled for 6 h | HP-MRF-8 | 100% milled for 72 h |
| HP-MRF-3 | 100% milled for 12 h | HP-MRF-9 | 90% not milled + 10% milled for 12 h |
| HP-MRF-4 | 100% milled for 24 h | HP-MRF-10 | 90% not milled + 10% milled for 24 h |
| HP-MRF-5 | 100% milled for 36 h | HP-MRF-11 | 90% not milled + 10% milled for 60 h |
| HP-MRF-6 | 100% milled for 48 h | HP-MRF-12 | 92% not milled + 8% milled for 24 h |
| Displacement (mm) | Frequency (Hz) | Current (A) | Kh (kN/mm) | Kd (kN/mm) | Qd (kN) | heq (%) |
|---|---|---|---|---|---|---|
| 5.0 | 0.1 | 2.0 | 51.85 | 2.34 | 247.55 | 45.39 |
| 5.0 | 0.1 | 1.0 | 44.26 | 2.77 | 207.45 | 44.44 |
| 5.0 | 0.1 | 0.0 | 35.80 | 1.39 | 172.05 | 43.31 |
| 5.0 | 0.1 | −1.0 | 27.21 | 2.0 | 126.05 | 41.49 |
| 5.0 | 0.1 | −2.0 | 18.31 | 1.91 | 82.00 | 42.41 |
| 5.0 | 1.0 | 2.0 | 54.78 | 2.89 | 259.45 | 43.91 |
| 5.0 | 1.0 | 1.0 | 50.14 | 3.38 | 233.80 | 43.22 |
| 5.0 | 1.0 | 0.0 | 42.42 | 2.05 | 201.85 | 43.44 |
| 5.0 | 1.0 | −1.0 | 33.33 | 2.41 | 154.60 | 41.75 |
| 5.0 | 1.0 | −2.0 | 23.63 | 1.56 | 110.35 | 41.43 |
| 5.0 | 2.5 | 2.0 | 56.19 | 5.13 | 255.30 | 42.16 |
| 5.0 | 2.5 | 1.0 | 52.84 | 5.87 | 234.85 | 41.09 |
| 5.0 | 2.5 | 0.0 | 48.24 | 5.81 | 212.15 | 40.03 |
| 5.0 | 2.5 | −1.0 | 38.93 | 5.28 | 168.25 | 38.22 |
| 5.0 | 2.5 | −2.0 | 27.56 | 3.55 | 120.05 | 37.62 |
| 60.0 | 0.1 | 2.0 | 5.00 | 0.00 | 300.00 | 57.29 |
| 60.0 | 0.1 | 1.0 | 4.99 | 0.05 | 296.40 | 57.12 |
| 60.0 | 0.1 | 0.0 | 4.95 | 0.08 | 292.10 | 56.12 |
| 60.0 | 0.1 | −1.0 | 4.85 | 0.02 | 290.30 | 55.78 |
| 60.0 | 0.1 | −2.0 | 4.42 | 0.03 | 263.45 | 55.03 |
| Reference | MRF Type | Particle Grading of CIP | Maximum Damping Force (kN) |
|---|---|---|---|
| Proposed work | HP-MRF | Double | 300 |
| Ref. [12] | Conventional MRF | Single | 97.9 |
| Ref. [13] | Conventional MRF | Single | 100 |
| Ref. [14] | Conventional MRF | Single | 200 |
| Ref. [15] | MRF with silica | Single | 250.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, F.; Cui, H.; Huang, X.; Du, C.; Mo, Z.; Lin, X. Mechanical Performance Enhancement of Self-Decoupling Magnetorheological Damper Enabled by Double-Graded High-Performance Magnetorheological Fluid. Appl. Sci. 2025, 15, 6305. https://doi.org/10.3390/app15116305
Guo F, Cui H, Huang X, Du C, Mo Z, Lin X. Mechanical Performance Enhancement of Self-Decoupling Magnetorheological Damper Enabled by Double-Graded High-Performance Magnetorheological Fluid. Applied Sciences. 2025; 15(11):6305. https://doi.org/10.3390/app15116305
Chicago/Turabian StyleGuo, Fei, Hanbo Cui, Xiaojun Huang, Chengbin Du, Zongyun Mo, and Xiaoguo Lin. 2025. "Mechanical Performance Enhancement of Self-Decoupling Magnetorheological Damper Enabled by Double-Graded High-Performance Magnetorheological Fluid" Applied Sciences 15, no. 11: 6305. https://doi.org/10.3390/app15116305
APA StyleGuo, F., Cui, H., Huang, X., Du, C., Mo, Z., & Lin, X. (2025). Mechanical Performance Enhancement of Self-Decoupling Magnetorheological Damper Enabled by Double-Graded High-Performance Magnetorheological Fluid. Applied Sciences, 15(11), 6305. https://doi.org/10.3390/app15116305