

Comparison of Image Preprocessing Strategies for Convolutional Neural Network-Based Growth Stage Classification of Butterhead Lettuce in Industrial Plant Factories


Abstract
1. Introduction
- To assess the feasibility of CNN-based growth stage classification using raw, unstructured images of butterhead lettuce.
- To compare classification performance between models trained on raw images and those trained on images processed through GrabCut–Watershed segmentation.
- To evaluate cross-classification performance between raw and preprocessed domains in order to examine generalization capacity and inform future system design choices.
- A data-centric analysis of preprocessing strategies in CNN-based growth stage classification models, identifying scenarios where preprocessing helps or hinders model effectiveness.
- An empirical understanding of the trade-offs between segmentation-based and raw image-based training approaches, particularly under data-limited conditions.
- A foundation for future research into lightweight architectures and efficient data pipelines that support scalable deployment in industrial plant factories.
2. Materials and Methods
2.1. Dataset and Image Preprocessing
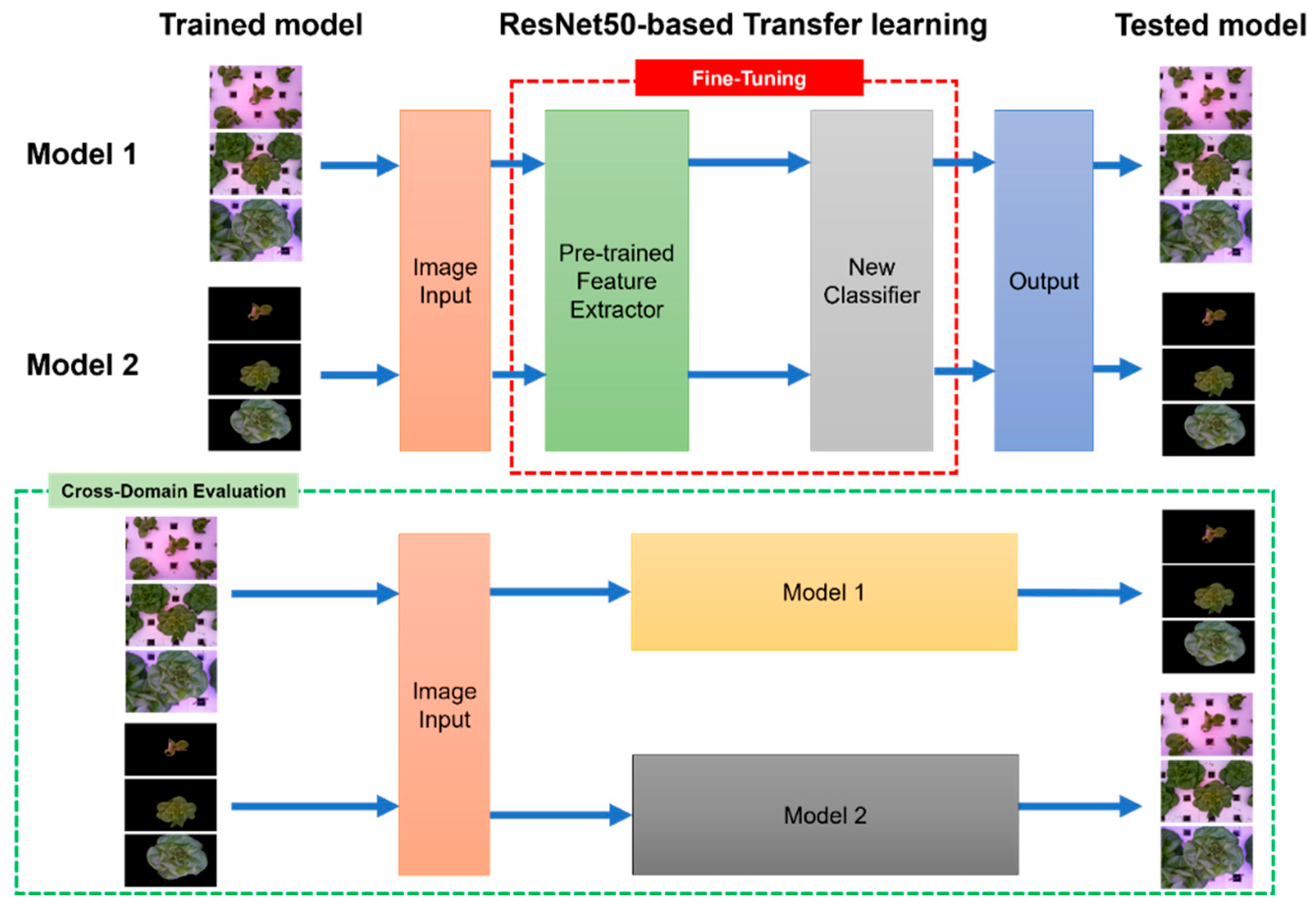
2.2. Experimental Design and Model Training
2.3. Training Strategy and Hyperparameter Settings
2.4. Evaluation Metrics and Model Interpretability
3. Results and Discussion
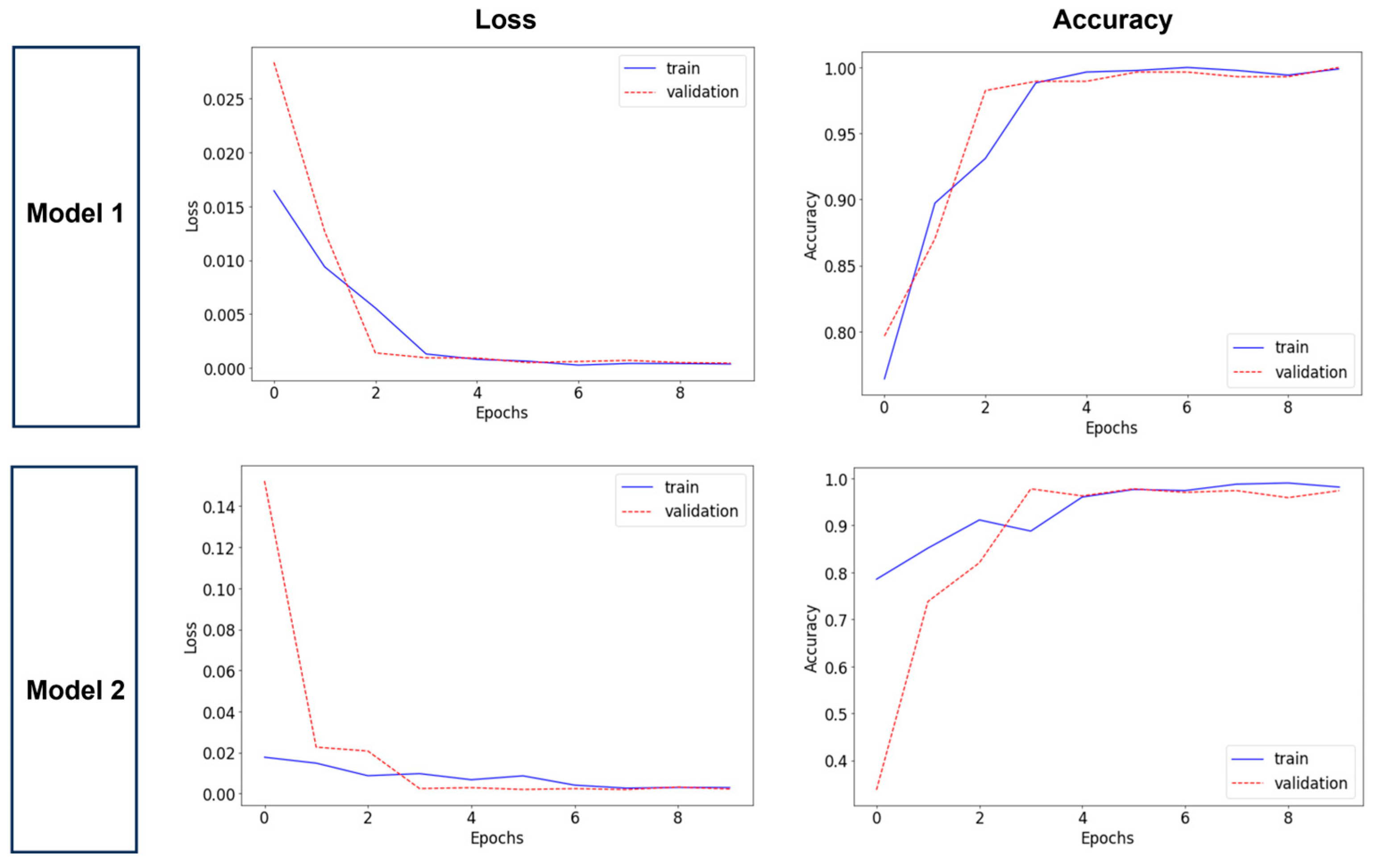
3.1. Evaluation of the Original Image-Based Model
3.2. Evaluation of the GrabCut–Watershed Image-Based Model
3.3. Cross-Domain Evaluation
3.4. Classification Error Patterns: Confusion Matrix Analysis
3.5. Attention Behavior Analysis: Grad-CAM Visualization
3.6. Inference Time and Practical Considerations for Deployment
3.7. Future Study
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brain, R.; Perkins, D.; Ghebremichael, L.; White, M.; Goodwin, G.; Aerts, M. The shrinking land challenge. ACS Agric. Sci. Technol. 2023, 3, 152–157. [Google Scholar] [CrossRef]
- Lehman, R.M.; Cambardella, C.A.; Stott, D.E.; Acosta-Martinez, V.; Manter, D.K.; Buyer, J.S.; Maul, J.E.; Smith, J.L.; Collins, H.P.; Halvorson, J.J.; et al. Understanding and enhancing soil biological health: The solution for reversing soil degradation. Sustainability 2015, 7, 988–1027. [Google Scholar] [CrossRef]
- Gu, D.; Andreev, K.; Dupre, M.E. Major trends in population growth around the world. China CDC Wkly. 2021, 3, 604. [Google Scholar] [CrossRef] [PubMed]
- Nations, U. World population prospects: The 2015 revision. United Nations Econ. Soc. Aff. 2015, 33, 1–66. [Google Scholar]
- Benke, K.; Tomkins, B. Future food-production systems: Vertical farming and controlled-environment agriculture. Sustain. Sci. Pract. Policy 2017, 13, 13–26. [Google Scholar] [CrossRef]
- Martinez, J. Controlled Environment Agriculture: A Systematic Review. Food Safety, 10 April 2024. Available online: https://www.food-safety.com/articles/9386-controlled-environment-agriculture-a-systematic-review (accessed on 25 May 2025).
- Hirama, J. The history and advanced technology of plant factories. Environ. Control Biol. 2015, 53, 47–48. [Google Scholar]
- Luna-Maldonado, A.I.; Vidales-Contreras, J.A.; Rodríguez-Fuentes, H. Advances and trends in development of plant factories. Front. Plant Sci. 2016, 7, 1848. [Google Scholar] [CrossRef]
- Chen, Y.-R.; Chao, K.; Kim, M.S. Machine vision technology for agricultural applications. Comput. Electron. Agric. 2002, 36, 173–191. [Google Scholar] [CrossRef]
- Liu, Y.; Mousavi, S.; Pang, Z.; Ni, Z.; Karlsson, M.; Gong, S. Plant factory: A new playground of industrial communication and computing. Sensors 2021, 22, 147. [Google Scholar] [CrossRef]
- Meng, Y.; Xu, M.; Yoon, S.; Jeong, Y.; Park, D.S. Flexible and high quality plant growth prediction with limited data. Front. Plant Sci. 2022, 13, 989304. [Google Scholar] [CrossRef]
- Nidamanuri, R.R. Deep learning-based prediction of plant height and crown area of vegetable crops using LiDAR point cloud. Sci. Rep. 2024, 14, 14903. [Google Scholar]
- Kim, J.S.G.; Moon, S.; Park, J.; Kim, T.; Chung, S. Development of a machine vision-based weight prediction system of butterhead lettuce (Lactuca sativa L.) using deep learning models for industrial plant factory. Front. Plant Sci. 2024, 15, 1365266. [Google Scholar] [CrossRef] [PubMed]
- Colonna, R.; Genzano, N.; Ciancia, E.; Filizzola, C.; Fiorentino, C.; D’Antonio, P.; Tramutoli, V. A Method to Determine the Optimal Period for Field-Scale Yield Prediction Using Sentinel-2 Vegetation Indices. Land 2024, 13, 1818. [Google Scholar] [CrossRef]
- Du, L.; Yang, H.; Song, X.; Wei, N.; Yu, C.; Wang, W.; Zhao, Y. Estimating leaf area index of maize using UAV-based digital imagery and machine learning methods. Sci. Rep. 2022, 12, 15937. [Google Scholar] [CrossRef]
- Tan, S.; Liu, J.; Lu, H.; Lan, M.; Yu, J.; Liao, G.; Wang, Y.; Li, Z.; Qi, L.; Ma, X. Machine learning approaches for rice seedling growth stages detection. Front. Plant Sci. 2022, 13, 914771. [Google Scholar] [CrossRef]
- Wang, H.; Chang, W.; Yao, Y.; Yao, Z.; Zhao, Y.; Li, S.; Liu, Z.; Zhang, X. Cropformer: A new generalized deep learning classification approach for multi-scenario crop classification. Front. Plant Sci. 2023, 14, 1130659. [Google Scholar] [CrossRef]
- Worth, L.; Rodgers, M.; Reardon, A. Butterhead Lettuce—Butterhead Lettuce Variety Performance Trial in in a Hydroponic NFT System. 2022. Available online: https://docs.lib.purdue.edu/cgi/viewcontent.cgi?article=1237&context=mwvtr (accessed on 25 May 2025).
- Schwartz, P.A.; Anderson, T.S.; Timmons, M.B. Predictive equations for butterhead lettuce (Lactuca sativa, cv. flandria) root surface area grown in aquaponic conditions. Horticulturae 2019, 5, 39. [Google Scholar] [CrossRef]
- Alejandrino, J.; Concepcion, R.; Lauguico, S.; Tobias, R.R.; Almero, V.J.; Puno, J.C.; Bandala, A.; Dadios, E.; Flores, R. Visual classification of lettuce growth stage based on morphological attributes using unsupervised machine learning models. In Proceedings of the 2020 IEEE REGION 10 CONFERENCE (TENCON), Osaka, Japan, 16–19 November 2020; IEEE: Piscataway, NL, USA, 2020. [Google Scholar]
- Seri’Aisyah, H. Pattern Recognition of Lettuce Varieties with Machine Learning; University of Malaya: Kuala Lumpur, Malaysia, 2019. [Google Scholar]
- Pang, S.; Thio, T.H.G.; Siaw, F.L.; Chen, M.; Xia, Y. Research on Improved Image Segmentation Algorithm Based on GrabCut. Electronics 2024, 13, 4068. [Google Scholar] [CrossRef]
- Satti, S.K.; Devi K, S.; Srinivasan, P. Recognizing the Indian Cautionary Traffic Signs using GAN, Improved Mask R-CNN, and Grab Cut. Concurr. Comput. Pract. Exp. 2023, 35, e7453. [Google Scholar] [CrossRef]
- Hernández-Vela, A.; Reyes, M.; Ponce, V.; Escalera, S. Grabcut-based human segmentation in video sequences. Sensors 2012, 12, 15376–15393. [Google Scholar] [CrossRef]
- Huang, X.; Wang, S.; Gao, X.; Luo, D.; Xu, W.; Pang, H.; Zhou, M. An H-grabcut image segmentation algorithm for indoor pedestrian background removal. Sensors 2023, 23, 7937. [Google Scholar] [CrossRef]
- Sreya John, D.P. Integration of automated grabcut algorithm with DeepLabv3+ to enhance image segmentation for accurate leaf disease detection and classification. J. Theor. Appl. Inf. Technol. 2024, 102, 7203–7215. [Google Scholar]
- Athani, S.; Athani, S. Identification of Different Food Grains by Extracting Colour and Structural Features using Image Segmentation Techniques. Indian J. Sci. Technol. 2017, 10, 1–7. [Google Scholar] [CrossRef]
- Liu, X.; Aldrich, C. Deep learning approaches to image texture analysis in material processing. Metals 2022, 12, 355. [Google Scholar] [CrossRef]
- Lee, K.; Yi, S.; Hyun, S.; Kim, C. Review on the recent welding research with application of CNN-based deep learning part I: Models and applications. J. Weld. Join. 2021, 39, 10–19. [Google Scholar] [CrossRef]
- Sistaninejhad, B.; Rasi, H.; Nayeri, P. A review paper about deep learning for medical image analysis. Comput. Math. Methods Med. 2023, 2023, 7091301. [Google Scholar] [CrossRef]
- Liu, J.; Wu, C.H.; Wang, Y.; Xu, Q.; Zhou, Y.; Huang, H.; Wang, C.; Cai, S.; Ding, Y.; Fan, H.; et al. Learning raw image denoising with bayer pattern unification and bayer preserving augmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Lauguico, S.C.; Concepcion, R.S.; Alejandrino, J.D.; Tobias, R.R.; Macasaet, D.D.; Dadios, E.P. A comparative analysis of machine learning algorithms modeled from machine vision-based lettuce growth stage classification in smart aquaponics. Int. J. Environ. Sci. Dev. 2020, 11, 442–449. [Google Scholar] [CrossRef]
- Chiu, M.T.; Xu, X.; Wei, Y.; Huang, Z.; Schwing, A.G.; Brunner, R.; Shi, H. Agriculture-vision: A large aerial image database for agricultural pattern analysis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 2828–2838. [Google Scholar]
- Peng, Y.; Wang, Y. An industrial-grade solution for agricultural image classification tasks. Comput. Electron. Agric. 2021, 187, 106253. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, Y.; Yang, M.; Wang, G.; Zhao, Y.; Hu, Y. Optimal training strategy for high-performance detection model of multi-cultivar tea shoots based on deep learning methods. Sci. Hortic. 2024, 328, 112949. [Google Scholar] [CrossRef]
- Barman, R.; Deshpande, S.; Agarwal, S.; Inamdar, U.; Devare, M.; Patil, A. Transfer learning for small dataset. In Proceedings of the National Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; Amity University Mumbai: Maharashtra, India, 2019; Volume 26. [Google Scholar]
- Mukti, I.Z.; Biswas, D. Transfer learning based plant diseases detection using ResNet50. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology, Khulna, Bangladesh, 20–22 December 2019; IEEE: Piscataway, NL, USA, 2019; pp. 1–6. [Google Scholar]
- Sarku, E.; Steele, J.; Ruffin, T.; Gokaraju, B.; Karimodini, A. Reducing data costs—Transfer learning based traffic sign classification approach. In Proceedings of the SoutheastCon 2021, Atlanta, GA, USA, 10–13 March 2021; IEEE: Piscataway, NL, USA, 2021; pp. 1–5. [Google Scholar]
- Masters, D.; Luschi, C. Revisiting small batch training for deep neural networks. arXiv 2018, arXiv:1804.07612. [Google Scholar]
- Bengio, Y. Practical recommendations for gradient-based training of deep architectures. In Neural Networks: Tricks of the Trade, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Lewkowycz, A. How to decay your learning rate. arXiv 2021, arXiv:2103.12682. [Google Scholar]
- Gang, M.S.; Kim, H.J.; Kim, D.W. Estimation of greenhouse lettuce growth indices based on a two-stage CNN using RGB-D images. Sensors 2022, 22, 5499. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Details | |||
|---|---|---|---|---|
| Original Images (Total) | Total | Stage1 | Stage 2 | Stage 3 |
| 476 | 163 | 160 | 153 | |
| GrabCut Preprocessed Images (Total) | Total | Stage1 | Stage 2 | Stage 3 |
| 445 | 139 | 171 | 135 | |
| Learning Rate | Train–Validation–Test | Batch Size | Epoch | Initial Learning Rate |
| 6:2:2 | 32 | 10 | 0.01 | |
| The total number of Augmented Images (Train–Validation–Test) | Original Images | GrabCut–Watershed Images | ||
| 1428 (856:285:287) | 1335 (801:267:267) | |||
| Learning Rate Scheduling | Step decay: reduce by a factor of 10 every 3 epochs | |||
| Model | Pre-trained ResNet50 with Fine-Tuning applied | |||
| Model | Inference Time Per Image (s) | Best Epoch | Test Loss | Test Accuracy (%) | Domain |
|---|---|---|---|---|---|
| Model 1 | 0.055 | 10th | 0.000 | 99.65 | Same |
| Model 2 | 0.037 | 4th | 0.003 | 97.75 | Same |
| Model 1-CDE (Cross-Domain Evaluation) | 0.040 | 9th | 0.017 | 82.77 | Cross |
| Model 2-CDE (Cross-Domain Evaluation) | 0.053 | 6th | 2.931 | 34.15 | Cross |
| Model | Weeks | Precision | Recall | F1-Score | The Number of Samples |
|---|---|---|---|---|---|
| Model 1 | Week1 | 1.000 | 1.000 | 1.000 | 93 |
| Week2 | 1.000 | 0.991 | 0.995 | 106 | |
| Week3 | 0.989 | 1.000 | 0.994 | 88 | |
| Model 2 | Week1 | 1.000 | 0.977 | 0.988 | 87 |
| Week2 | 0.971 | 0.971 | 0.971 | 102 | |
| Week3 | 0.962 | 0.987 | 0.975 | 78 | |
| Model 1-CDE (Cross-Domain Evaluation) | Week1 | 0.750 | 1.000 | 0.857 | 87 |
| Week2 | 0.900 | 0.643 | 0.750 | 98 | |
| Week3 | 0.877 | 0.866 | 0.871 | 82 | |
| Model 2-CDE (Cross-Domain Evaluation) | Week1 | 0.000 | 0.000 | 0.000 | 103 |
| Week2 | 0.000 | 0.000 | 0.000 | 86 | |
| Week3 | 0.343 | 1.000 | 0.510 | 98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-S.G.; Chung, S.; Ko, M.; Song, J.; Shin, S.H. Comparison of Image Preprocessing Strategies for Convolutional Neural Network-Based Growth Stage Classification of Butterhead Lettuce in Industrial Plant Factories. Appl. Sci. 2025, 15, 6278. https://doi.org/10.3390/app15116278
Kim J-SG, Chung S, Ko M, Song J, Shin SH. Comparison of Image Preprocessing Strategies for Convolutional Neural Network-Based Growth Stage Classification of Butterhead Lettuce in Industrial Plant Factories. Applied Sciences. 2025; 15(11):6278. https://doi.org/10.3390/app15116278
Chicago/Turabian StyleKim, Jung-Sun Gloria, Soo Chung, Myungjin Ko, Jihoon Song, and Soo Hyun Shin. 2025. "Comparison of Image Preprocessing Strategies for Convolutional Neural Network-Based Growth Stage Classification of Butterhead Lettuce in Industrial Plant Factories" Applied Sciences 15, no. 11: 6278. https://doi.org/10.3390/app15116278
APA StyleKim, J.-S. G., Chung, S., Ko, M., Song, J., & Shin, S. H. (2025). Comparison of Image Preprocessing Strategies for Convolutional Neural Network-Based Growth Stage Classification of Butterhead Lettuce in Industrial Plant Factories. Applied Sciences, 15(11), 6278. https://doi.org/10.3390/app15116278