
Simplified Derivative-Based Carrierless PPM Using VCO and Monostable Multivibrator

 ,
,
Abstract
1. Introduction
1.1. Literature Review
1.2. Research Contributions
- To develop a unified analytical framework showing that PPM demodulation fundamentally yields the derivative of the message signal.
- To analyze and compare several carrierless PPM demodulation methods, confirming their inherent link to the derivative of the message signal.
- To propose and implement a novel PPM modulation scheme where the differentiated message signal drives a VCO and monostable multivibrator, streamlining carrierless PPM generation.
- To validate the proposed approach through simulations and experiments, demonstrating effective signal recovery and highlighting performance benefits over conventional methods in tested scenarios.
2. Principle of Signal Component Analysis for PWM and PPM
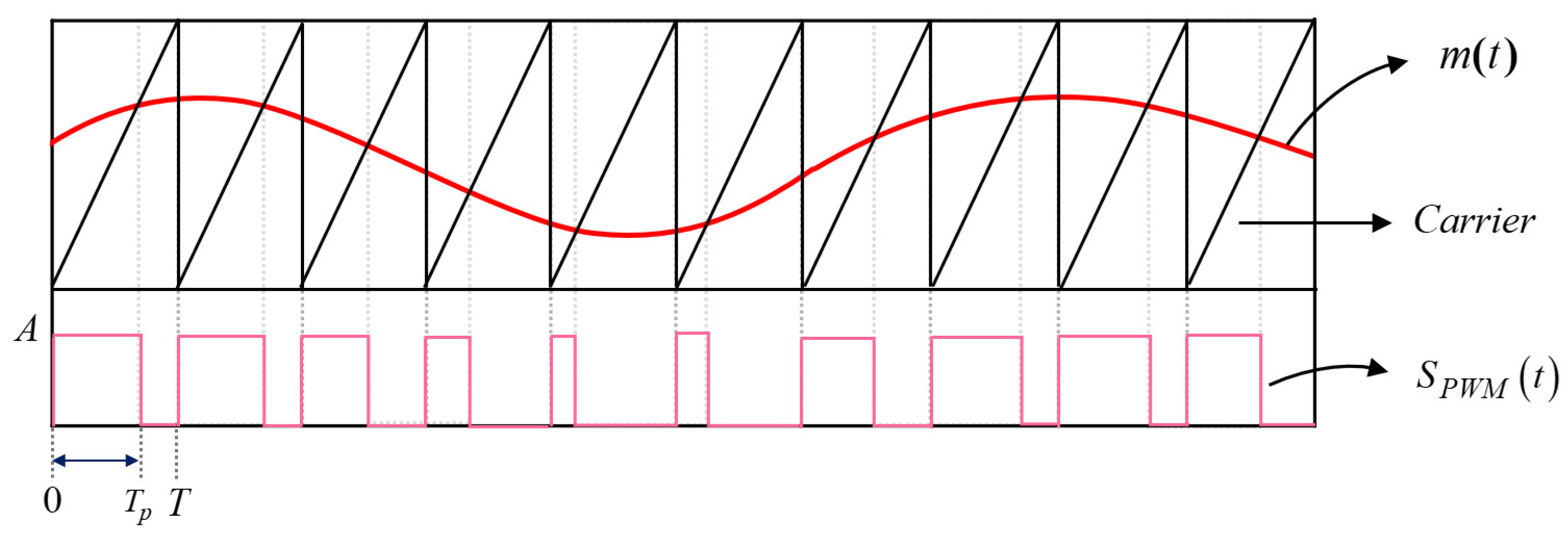
2.1. Analysis of Components in PWM Signals
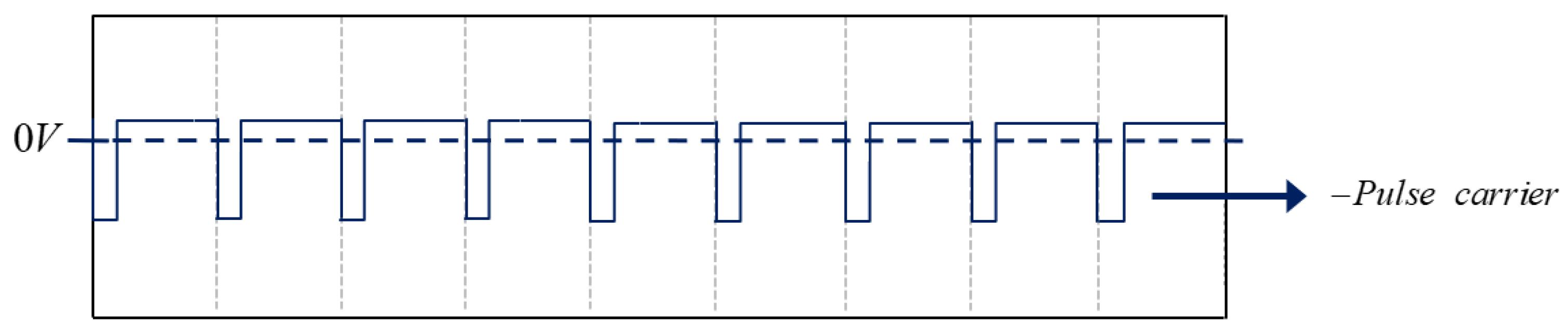
2.2. Analysis of Components in PPM Signals
3. Proposed Techniques of Demodulation and Modulation
3.1. General PPM Demodulation
3.2. Proposed Carrierless PPM Techniques
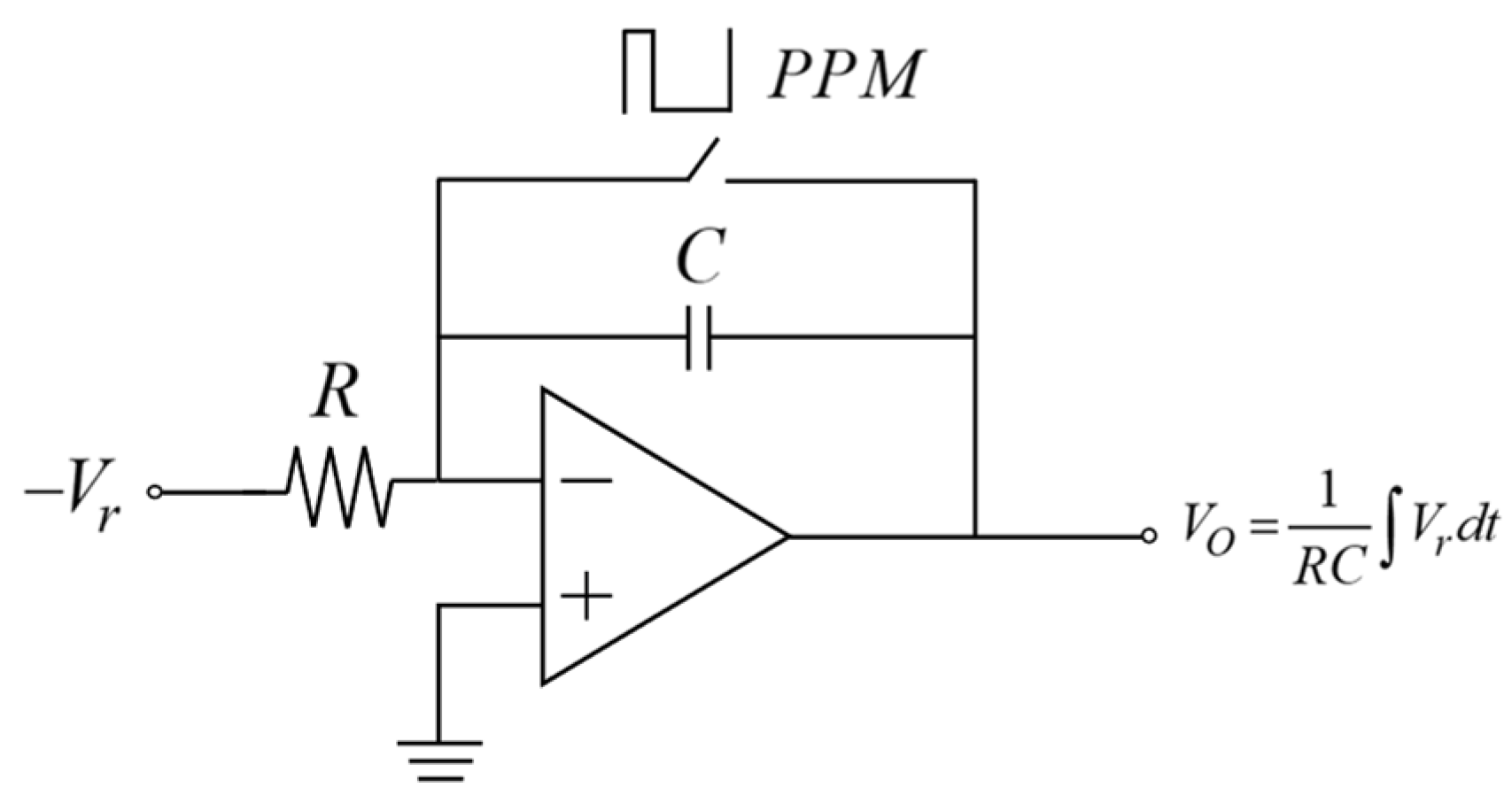
3.2.1. Demodulation via Integration: Derivative Recovery from PPM
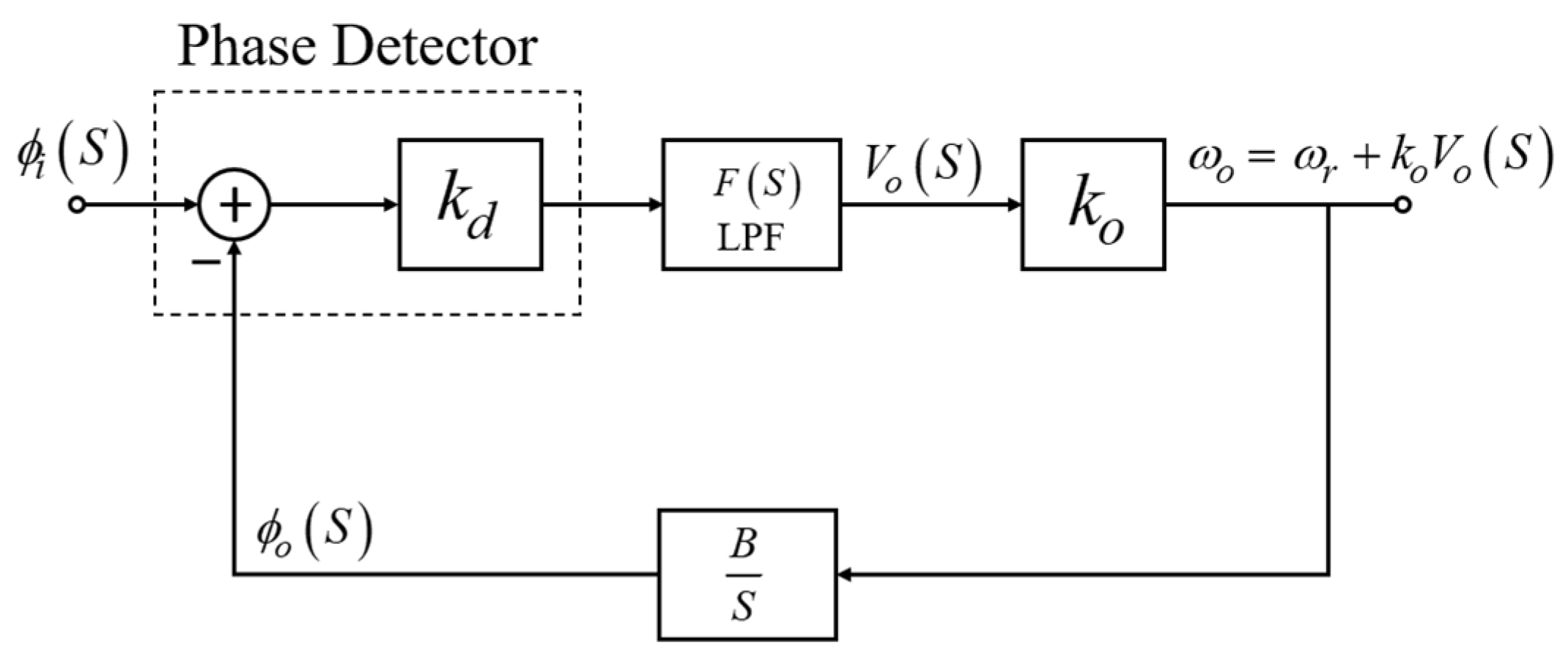
3.2.2. Demodulation via PLL: Phase-to-Derivative Relationship
- represents the Laplace transform of the phase input ,
- represents the Laplace transform of the phase output ,
- represents the Laplace transform of the LPF output ,
- represents the Laplace transformation of a constant of free response,
- represents the cutoff frequency of the LPF,
- refers to the transfer function of the LPF,
- is a constant of a phase detection circuit,
- is a constant of VCO sensitivity, and
- is a gain of an integrator circuit.
3.2.3. Demodulation via Quasi-FM-PWM: Frequency Modulation Perspective
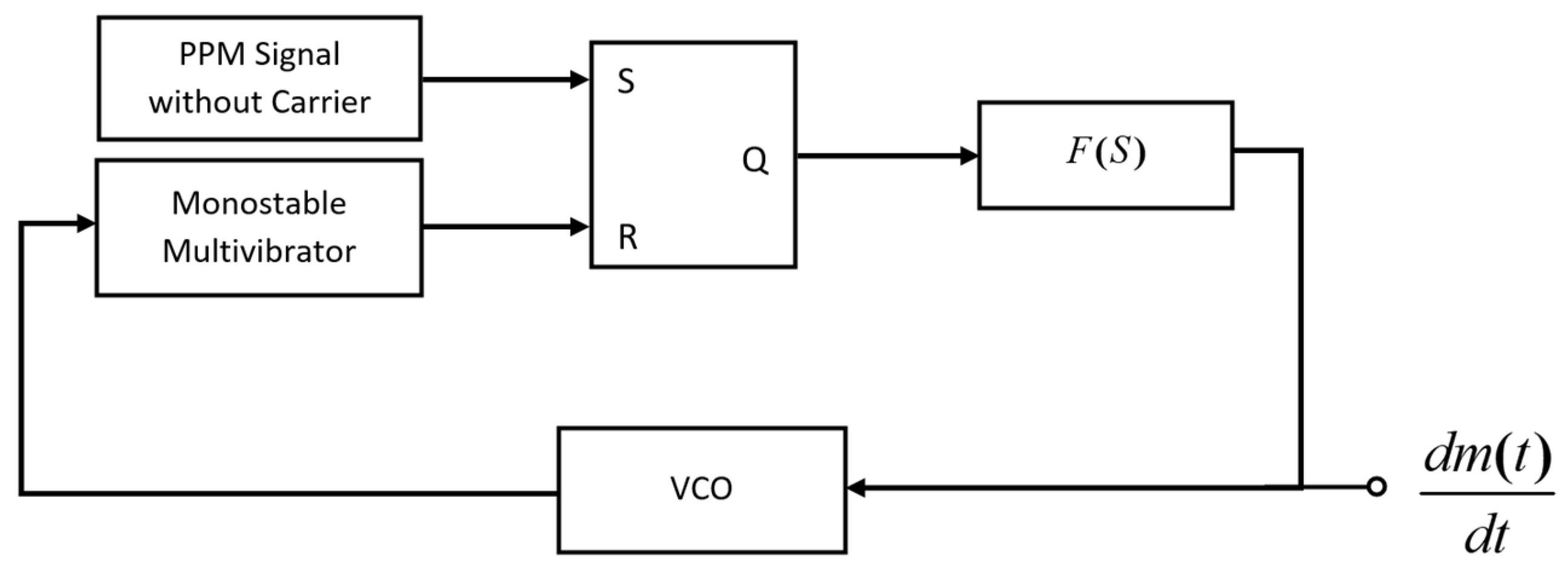
3.2.4. Proposed Derivative-Based PPM Modulation Using VCO and Monostable Multivibrator
4. Performance Analysis
4.1. Error Analysis of Demodulation Using Integration
4.2. PLL Error Analysis
4.3. FM-PWM Error Analysis
5. Experiments and Results
5.1. MATLAB Simulations
5.1.1. Syntheses of PWM and PPM Signals
- A.
- PWM Signal Generation and Analysis
- B.
- PPM Signal Synthesis Through Signal Processing
- C.
- Signal Conditioning and Final Processing
- D.
- Implementation Methodology
5.1.2. Noise Resistance Analysis
- A.
- Experimental Configuration and Methodology
- B.
- Noise-free Performance Analysis
- C.
- Noise Impact Assessment
- D.
- Quantitative Performance Evaluation
5.2. Experiment of Carrierless PPM Demodulation Using an Integration Method
5.3. Experiment of Carrierless PPM Demodulation Using a PLL Method
5.4. Experiment of Carrierless PPM Demodulation Using Conversion to Quasi-FM-PWM Signal
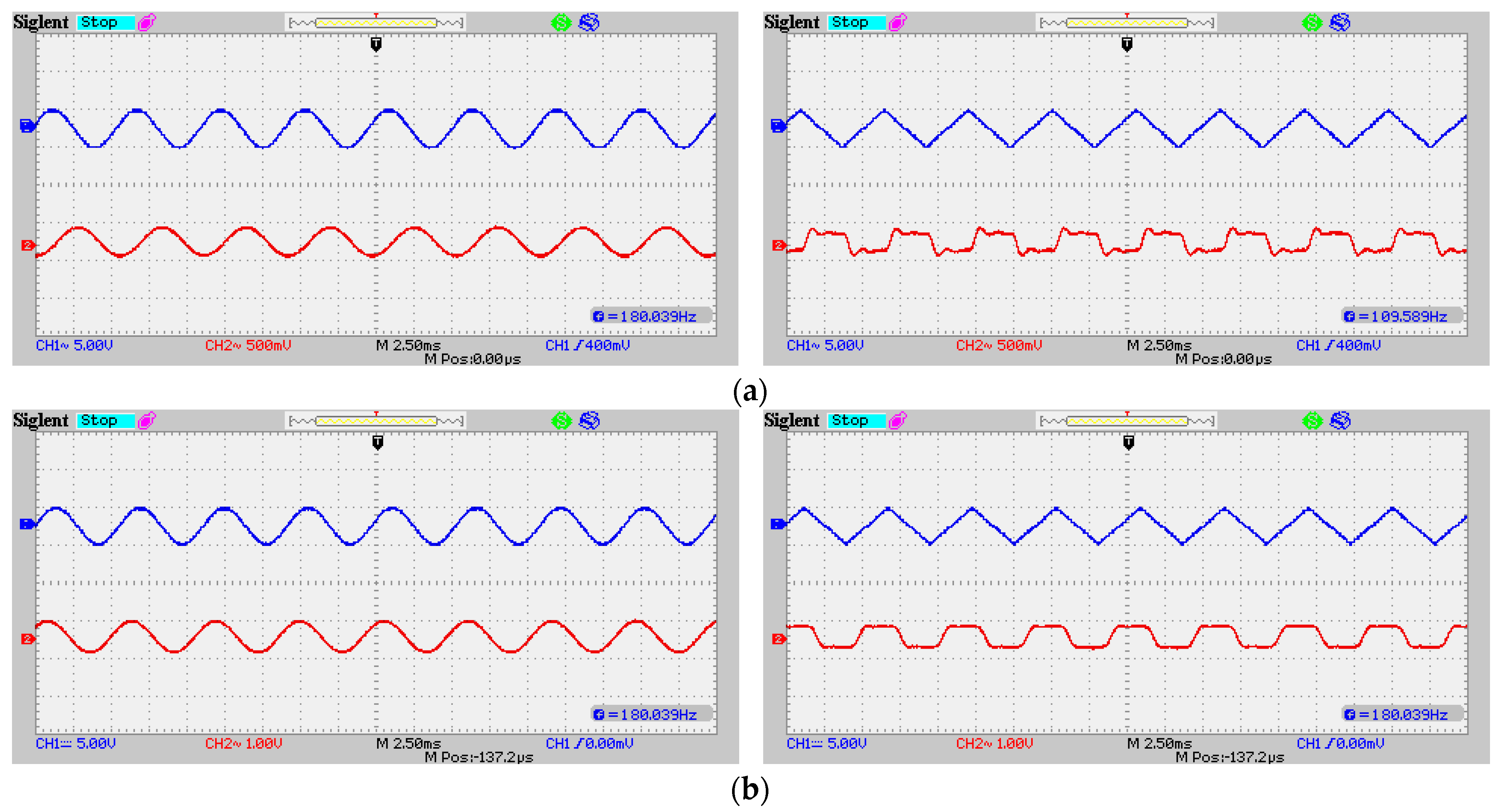
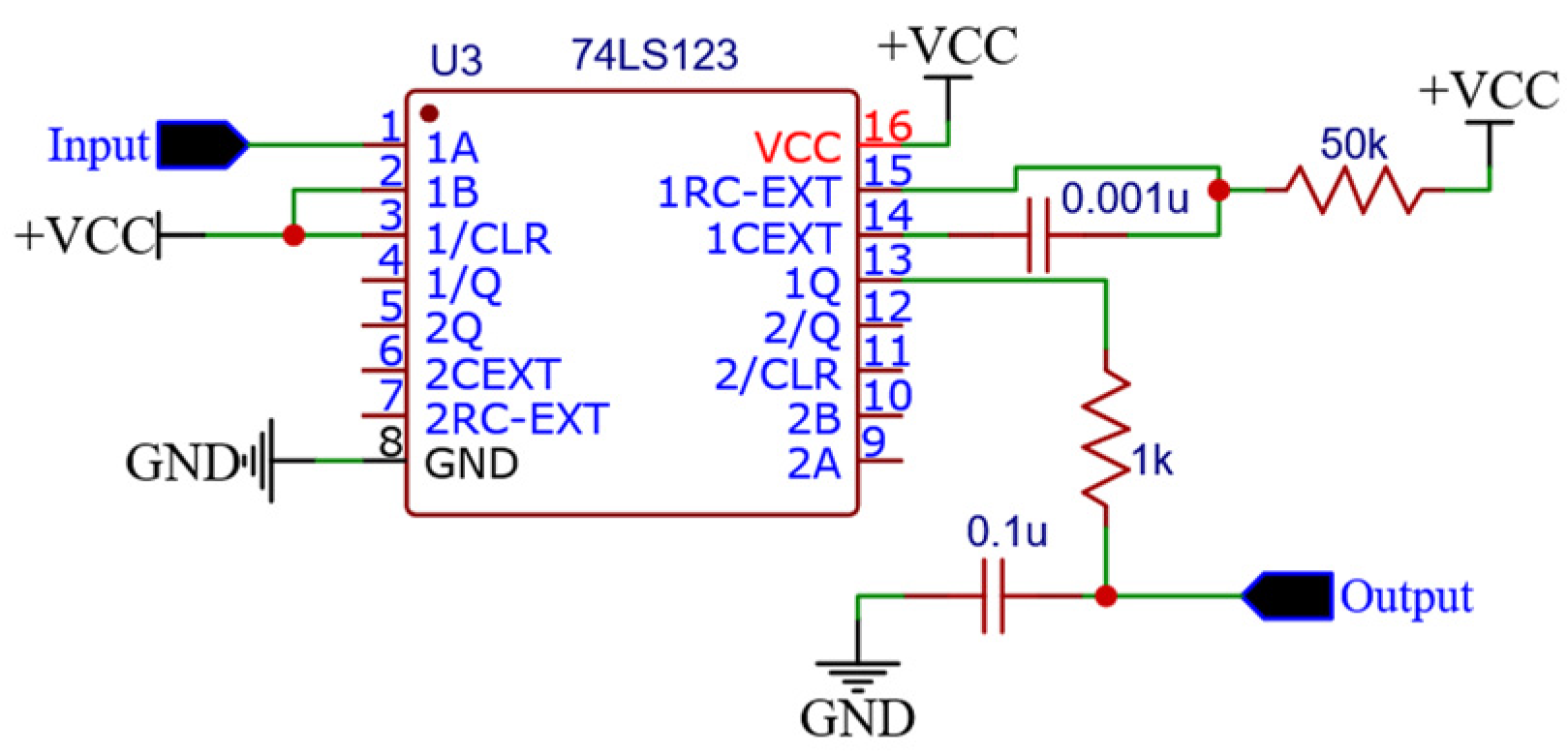
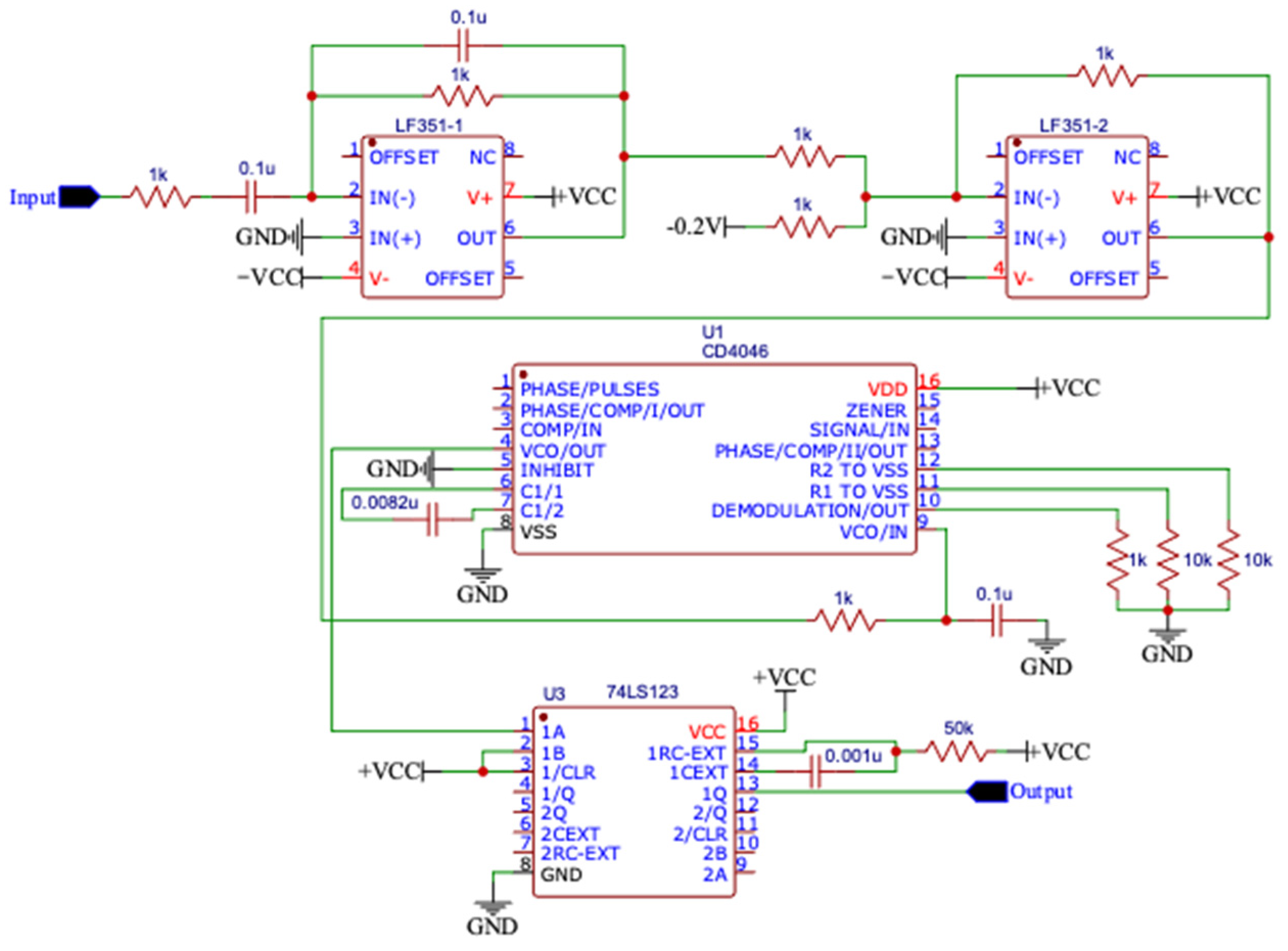
5.5. Experiment of Proposed Novel Derivative-Based PPM Modulation Using VCO and Monostable Multivibrator
6. Discussion and Analysis of Results
6.1. Non-Ideal Component Analysis
6.1.1. Practical Limitations of System Components
- A.
- Differentiator Noise Amplification
- B.
- VCO Phase Noise and Timing Jitter
- C.
- Monostable Multivibrator Timing Inaccuracies
- D.
- System-Level Performance Impact
6.1.2. Message Signal Bandwidth and Slew Rate Limitations
- A.
- Differentiator Frequency Response Limitations
- B.
- Signal Frequency Dependencies
6.2. Discussion and Perspectives
6.2.1. Interpretation of Results
- A.
- Signal Synthesis and Modulation Performance
- B.
- Demodulation Method Comparison
- Integration Method: Demonstrated effective signal recovery for both sinusoidal and triangular waveforms, with the integrator circuit providing consistent demodulation performance across different signal types.
- PLL Method: Operating with a 12 kHz carrier frequency and 9.6–14.1 kHz lock range, the PLL successfully tracked frequency variations and recovered the modulating signals with acceptable fidelity.
- Quasi-FM-PWM Conversion: The monostable multivibrator approach with RC low-pass filtering showed robust performance, particularly suitable for applications requiring implementation simplicity.
- C.
- Noise Resistance Analysis
- D.
- Clarification of Signal Recovery Characteristics
- E.
- Integration Circuit Implementation
6.2.2. Implications
- A.
- Laboratory-Scale Implementation Considerations
- B.
- System Performance Characteristics
- 1.
- Modulation Fidelity: Both time–domain and frequency–domain analysis confirm accurate signal modulation and recovery across different signal types.
- 2.
- Implementation Flexibility: Three distinct demodulation approaches validate system compatibility with various receiver architectures.
- 3.
- Noise Tolerance: Quantitative analysis demonstrates acceptable performance degradation characteristics under realistic noise conditions.
- 4.
- Circuit Simplicity: Hardware implementation using standard components (op-amps, VCO IC4046, monostable 74LS123) demonstrates practical feasibility without requiring specialized or expensive components.
- C.
- Design Simplification Rationale
6.2.3. Limitations
- A.
- Frequency Range Constraints
- B.
- Component Performance Dependencies
- C.
- Demodulation Phase Relationships
- D.
- Power Consumption Analysis Gap
6.2.4. Future Directions
- A.
- High-Frequency Implementation and OWC Integration
- B.
- Comprehensive Power Analysis
- C.
- Advanced Signal Processing Integration
- D.
- System-Level Performance Evaluation
- E.
- Practical Implementation Optimization
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sarelius, D. FMS flight simulator encoder: Practice without crashing your models. Elektor-Electron. 2004, 30, 22–27. [Google Scholar]
- Wisartpong, P.; Koseeyaporn, J.; Wardkein, P. Pulse position modulation based on phase locked loop. In Proceedings of the 2009 6th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Pattaya, Thailand, 6–9 May 2009; pp. 578–581. [Google Scholar]
- Wilson, B.; Ghassemlooy, Z. Pulse time modulation techniques for optical communications: A review. IEE Proc. J. Optoelectron. 1993, 140, 346–358. [Google Scholar] [CrossRef]
- Park, H.; Barry, J.R. Modulation analysis for wireless infrared communications. In Proceedings of the IEEE International Conference on Communications ICC ‘95, Seattle, WA, USA, 18–22 June 1995; pp. 1182–1186. [Google Scholar]
- Al-Gailani, S.A.; Salleh, M.F.M.; Salem, A.A.; Shaddad, R.Q.; Sheikh, U.U.; Algeelani, N.A. A survey of free space optics (fso) communication systems, links, and networks. IEEE Access 2021, 9, 7353–7373. [Google Scholar] [CrossRef]
- Tang, W.; Wang, S.; Xu, Y.; Yu, Z. The research process, application, and the future development of pulse-position modulation. J. Phys. Conf. Ser. 2022, 2384, 012026. [Google Scholar] [CrossRef]
- Yu, Z. Application of digital pulse position modulation. In Proceedings of the International Conference on Neural Networks, Information, and Communication Engineering (NNICE 2022), Qingdao, China, 25–27 March 2022. [Google Scholar]
- Mahdiraji, G.A.; Zahedi, E. Comparison of selected digital modulation schemes (ook, ppm and dpim) for wireless optical communications. In Proceedings of the 2006 4th Student Conference on Research and Development, Shah Alam, Malaysia, 27–28 June 2006; pp. 5–10. [Google Scholar]
- Liu, Y. Design of pulse position modulation system based on programmable logic device. In Proceedings of the International Conference on Neural Networks, Information, and Communication Engineering (NNICE 2022), Qingdao, China, 25–27 March 2022. [Google Scholar]
- Li, B. Design of digital pulse-position modulation system based on minimum distance method. In Proceedings of the International Conference on Neural Networks, Information, and Communication Engineering (NNICE 2022), Qingdao, China, 25–27 March 2022. [Google Scholar]
- Gopal, P.; Jain, V.K.; Kar, S. Spectral analysis of intensity modulation schemes in free space optical communications. IET Commun. 2015, 9, 909–916. [Google Scholar] [CrossRef]
- Gu, S.; Liang, C.; Zhang, J. Spectral analysis of (multi-) pulse-position modulation. J. Phys. Conf. Ser. 2021, 2093, 012024. [Google Scholar] [CrossRef]
- Ebrahimi, F.; Ghassemlooy, Z.; Olyaee, S. Investigation of a hybrid ofdm-pwm/ppm visible light communications system. Opt. Commun. 2018, 429, 65–71. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Z.; Gong, Z.; Xia, Z.; Yuan, T.; Gu, Z.; Zhao, W.; Chen, J. Hybrid modulation scheme for visible light communi-cation using cmos. Opt. Commun. 2019, 440, 89–94. [Google Scholar] [CrossRef]
- Carlson, A.B.; Crilly, P.B. Communication Systems: An Introduction to Signals and Noise in Electrical Communication, 5th ed.; McGraw-Hill: New York City, NY, USA, 2010; pp. 275–279. [Google Scholar]
- Chiang, H.H. Electronic Wave Forming and Processing Circuits; Wiley: Hoboken, NJ, USA, 1986. [Google Scholar]
- Lathi, B.P.; Ding, Z. Modern Digital and Analog Communication, 5th ed.; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Furihata, M. FM Detector Using Monostable Multivibrators. US4504792A, 12 March 1985. [Google Scholar]
- Boongsri, R.; Wardkein, P.; Chodkaveekityada, P. FM demodulation based on fm to pwm conversion with voltage gain con-trol. In Proceedings of the International Conference on Computer, Networks and Communication Engineering (ICCNCE 2013), Beijing, China, 23–24 May 2013; pp. 140–143. [Google Scholar]
- Safyannikov, N.M.; Bureneva, O. Time-to-voltage converters based on the time-sharing principle. IEEE Access 2020, 8, 17442–17453. [Google Scholar] [CrossRef]
- Shin, S.; Jung, Y.; Kweon, S.-J.; Lee, E.; Park, J.-H.; Kim, J.; Yoo, H.-J.; Je, M. Design of reconfigurable time-to-digital converter based on cascaded time interpolators for electrical impedance spectroscopy. Sensors 2020, 20, 1889. [Google Scholar] [CrossRef] [PubMed]
- Crepaldi, M.; Casu, M.R.; Graziano, M.; Zamboni, M. A mixed-signal demodulator for a low-complexity ir-uwb receiver: Methodology, simulation and design. Integration 2009, 42, 47–60. [Google Scholar] [CrossRef]
- Haykin, S.; Moher, M. Communication Systems, 5th ed.; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2009. [Google Scholar]
- Kozawa, Y. Selective multi-pulse pulse position modulation for lighting constrained visible light communications. In Proceedings of the 2024 IEEE International Symposium on Circuits and Systems (ISCAS), Singapore, 19–22 May 2024. [Google Scholar]
- Li, M.; Zhang, B.; Zhang, B.; Liu, W.; Kim, T.; Wang, W.; Zhao, X.; Wang, C. Multi-carrier based positional modulation design with discrete phase values for metasurface elements. Digit. Signal Process. 2023, 137, 104047. [Google Scholar] [CrossRef]
- Bamiedakis, N.; Penty, R.V.; White, I.H. Carrierless amplitude and phase modulation in wireless visible light communication systems. Philos. Trans. R. Soc. A 2020, 378, 20190181. [Google Scholar] [CrossRef] [PubMed]
- Pulkkinen, M.; Haapala, T.; Salomaa, J.; Halonen, K. Low-power wireless transceiver with 67-nW differential pulse-position modulation transmitter. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 5468–5481. [Google Scholar] [CrossRef]
- Khani, H. Improved detection schemes for non-coherent pulse-position modulation. Wirel. Pers. Commun. 2023, 131, 2173–2192. [Google Scholar] [CrossRef] [PubMed]
- Elsayed, E.E.; Yousif, B.B. Performance enhancement of M-ary pulse-position modulation for a wavelength division multi-plexing free-space optical systems impaired by interchannel crosstalk, pointing error, and ase noise. Opt. Commun. 2020, 475, 126219. [Google Scholar] [CrossRef]
- Kim, J.; Clerckx, B. Wireless information and power transfer for iot: Pulse position modulation, integrated receiver, and ex-perimental validation. IEEE Internet Things J. 2022, 9, 12378–12394. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | Authors/Title (Year) | Application/System Context | Advantages | Limitations | Comparison to Proposed Method |
|---|---|---|---|---|---|
| [2] | Wisartpong et al. (2009) | PLL-based analog PPM circuit with carrier/no-carrier options | Simple tuning, compact implementation | Requires PLL, RS flip-flop; medium complexity | Proposed system eliminates PLL and flip-flop, yielding lower complexity and fewer analog blocks |
| [6] | Tang et al. (2022) | Overview of PPM developments and experiments | Broad analysis; discusses BER/SNR trends | No specific hardware design or simplification | Proposed work contributes practical, minimal hardware design and theoretical modeling validated by experiments |
| [8] | Mahdiraji & Zahedi (2006) | Comparative study of OOK, PPM, and DPIM | PPM has best power efficiency | Requires complex synchronization for PPM | Proposed method avoids synchronization overhead by leveraging simplified analog processing |
| [9] | Liu (2022) | Remote communication with frame head/tail for sync | Frame sync via Gray code; low BER | Relies on FPGA and digital logic | Proposed design avoids digital complexity, using analog VCO + monostable |
| [10] | Li (2022) | PPM system modeled with AWGN and BER analysis | Theoretical BER validation via simulation | No hardware implementation or simplification focus | Proposed work validates modulation/demodulation both in MATLAB and on physical circuit level (MATLAB Version R2024b Update 5 (24.2.0.2871072)) |
| [13] | Ebrahimi et al. (2018) | Combines OFDM with PWM/PPM for VLC | Handles PAPR well; improves BER | OFDM integration increases circuit complexity | Proposed system is free of OFDM blocks and uses lower-power analog modules instead |
| [19] | Boongsri et al. (2013) | Analog FM demodulation via PWM generation and LPF | Simple architecture; adjustable gain | Limited to audio signals | Inspired FM-to-PPM block structure in the proposed work with general signal applicability |
| SNR | Pearson Correlation |
|---|---|
| No noise | −0.8908 |
| −8.4387 | −0.1505 |
| −3.0871 | −0.6692 |
| 1.4888 | −0.8291 |
| 6.1815 | −0.8802 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koseeyaporn, J.; Wardkein, P.; Sinchai, A.; Kaew-in, C.; Tuwanut, P. Simplified Derivative-Based Carrierless PPM Using VCO and Monostable Multivibrator. Appl. Sci. 2025, 15, 6272. https://doi.org/10.3390/app15116272
Koseeyaporn J, Wardkein P, Sinchai A, Kaew-in C, Tuwanut P. Simplified Derivative-Based Carrierless PPM Using VCO and Monostable Multivibrator. Applied Sciences. 2025; 15(11):6272. https://doi.org/10.3390/app15116272
Chicago/Turabian StyleKoseeyaporn, Jeerasuda, Paramote Wardkein, Ananta Sinchai, Chanapat Kaew-in, and Panwit Tuwanut. 2025. "Simplified Derivative-Based Carrierless PPM Using VCO and Monostable Multivibrator" Applied Sciences 15, no. 11: 6272. https://doi.org/10.3390/app15116272
APA StyleKoseeyaporn, J., Wardkein, P., Sinchai, A., Kaew-in, C., & Tuwanut, P. (2025). Simplified Derivative-Based Carrierless PPM Using VCO and Monostable Multivibrator. Applied Sciences, 15(11), 6272. https://doi.org/10.3390/app15116272