1. Introduction
In recent years, the unmanned surface vessel (USV) has garnered increasing attention as an intelligent marine vessel widely used in various fields, such as military reconnaissance, marine scientific research, and environmental monitoring. In complex marine environments, the motion of the USV is a complex time-varying system. The models commonly used to describe the USV’s maneuvering motion include the Abkowitz model [
1], the Maneuvering Modeling Group model [
2], and the Nomoto model [
3]. Among them, the Nomoto model is relatively simple in structure and widely used due to its ease of application. The modeling methods mainly include model experiments, empirical formulas [
4], computational fluid dynamics software calculations [
5], and system identification [
6]. Among these, system identification, as an important branch of modern control theory, offers advantages such as simplicity, efficiency, and ease of use, and has gradually become an essential research method for modeling USV motion.
With the extensive research on identification algorithms in the field of marine engineering, various identification methods, such as the Kalman filter (KF), least squares (LS), and support vector machines (SVM), have been developed. Recent years have brought to attention filtering and state estimation paradigms in systems that exhibit rapidly changing states [
7]. Many scholars have conducted research related to the identification of ship maneuverability. Aimed at the inconvenience of obtaining model parameters using the traditional experimental method, the parameter identification of the unmanned marine vehicle’s (UMV) maneuvering model based on extended KF and SVM is studied to predict the maneuverability of UMV [
8]. In order to further explore more efficient recognition algorithms to solve the problem of ship motion recognition modeling, a novel recognition algorithm for ship maneuvering modeling in three-dimensional space is proposed in [
9] based on the recursive least squares (RLS) method, and it is validated by simulation experiments. In [
10], a novel method, Gaussian process regression optimized by the genetic algorithm, is proposed for the nonparametric modeling of ship maneuvering motion, and the Mariner vessel and the container ship KCS are selected as case studies. A parameter identification method that merges experimentally monitored signals and physics-based simulation data is proposed, targeting the identification tasks in shaft seals, which are challenging due to the high-dimensional parameter space [
11].
Meanwhile, Li [
12] utilizes the LS method to determine the initial parameters of the ship’s mathematical model, and then correlation and sensitivity analysis are conducted to select the key parameters in the Abkowitz model. The X-exchange technique is used to convert the ship’s nonlinear response model into a linear form, and an improved LS identification algorithm is then proposed to estimate the unknown model parameters by [
13]. A parameter identification scheme for the second-order nonlinear Nomoto model based on the square-root unscented Kalman filter is proposed by Meng et al. [
14], and the maneuvering parameters of the self-propelled model are determined based on simulation data. In [
15], a novel parameter estimation algorithm is proposed that transforms a system with colored noise into two identification models with white noise, allowing for more accurate parameter estimates than existing related algorithms. The KF is considered for linear systems with unknown structural parameters in [
16], and the classical KF is then employed to predict and update the states. The maximum correntropy Kalman filter is developed to address the issue of the rapid performance degradation of the KF when faced with non-Gaussian noise in [
17]. In [
18], a new adaptive fast desensitized Kalman filter algorithm and adaptive fast desensitized extended Kalman filter are proposed to adjust the sensitivity-weighting matrix in the desensitized Kalman filter. To solve the estimation problem in three-dimensional space, the quaternion Kalman filter is developed by Lin et al. in [
19] for quaternion-valued signals using the well-known minimum mean square error criterion under the Gaussian assumption.
In other fields, system identification is also widely used. The development of a real-time vehicle state estimator based on can bus data is presented, which considers suspension kinematics and tire dynamics while also estimating road slope and tire-road interaction characteristics in [
20]. In [
21], the hybrid models of the Kalman filter and neural networks for state estimation are reviewed, highlighting their academic advancements and demonstrating that these models outperform single models in terms of accuracy and generalization.
Through analysis of the above literature, it can be seen that many studies simulate disturbances such as wind, waves, and currents in maneuvering simulations, add sensor noise to mimic real operational conditions, and obtain much of the experimental data from model tests [
8,
9,
10,
11]. The data acquired through such simulations cannot accurately reflect the various physical effects involved in the motion of the USV, including the influence of its navigational state and external environmental factors. The dynamic changes in the motion data are critical for the accuracy of the final model that is constructed.
Additionally, the parameter identification algorithms proposed in [
12,
13,
14,
15] fail to effectively smooth the data. They are highly susceptible to noise and outliers, which results in inaccurate parameter estimation, and these algorithms do not adequately account for the nonlinear characteristics of the data, leading to poor model fitting and compromised identification accuracy. Many studies on the KF algorithm [
16,
17,
18,
19] assume the system is linear, which makes it significantly less effective in dealing with nonlinear dynamics. Since KF relies on an exact linear system model, it is less adaptable to nonlinear systems and cannot directly handle nonlinear state transfer and observation models, and the accuracy of the filtering estimation will be affected if the model has errors or is incomplete, which may lead to biased estimation results in practical applications.
Motivated by the above analysis, a parameter identification algorithm of the USV Nomoto model based on improved EKF is presented in this paper. The full-scale vessel data are utilized to accurately reflect the various state variables involved in USV motion, including its navigational states and the influence of external environmental factors. In order to fit a local model around each data point, the LWR algorithm is proposed by applying weighted least squares (WLS), providing a smooth estimate of the data to ensure the stability of the identification results. Additionally, the EKF is proposed by performing a first-order Taylor expansion of the nonlinear system based on the current state estimate values, which provides a linear approximation for the prediction and parameter updates. In comparison to previous studies, the key contributions of this research are outlined as follows:
(1) Full-scale vessel data are employed to more accurately capture the state variables involved in USV motion, including both navigational states and the complex influences of external environmental factors such as wind, waves, and currents.
(2) The LWR algorithm is proposed to fit a local model around each data point using weighted least squares, effectively smoothing the data and ensuring stable, reliable parameter estimates to enhance the accuracy and robustness of the identification process.
(3) The EKF is designed to approximate the nonlinear system by performing a first-order Taylor expansion based on the current state estimate values, allowing for accurate prediction of system states and efficient parameter updates, thereby improving the model’s adaptability and estimation accuracy in dynamic environments.
The rest of this paper is structured as follows: The parameter identification problem description of the USV is introduced in
Section 2. In
Section 3, the EKF algorithm is outlined. Identification results and analysis are conducted in
Section 4. Finally,
Section 5 concludes this paper.
2. Problem Description
The parameter identification of USV refers to the process of estimating and determining the unknown parameters in the USV model using real-time navigation data. The motion state data collected during USV operations, including sensor-acquired state data and corresponding control commands, are related to specific motion parameters in the USV mathematical model. By employing parameter identification algorithms, the unknown parameters in the model can be determined, leading to a more accurate USV motion model. There are three crucial steps that precede parameter identification: the establishment of the USV Nomoto model, the construction of the identification model, and the design of the LWR filtering algorithm.
2.1. The Establishment of the USV Nomoto Model
While the USV maintains stable navigation, its motion state is primarily affected by bow pitching. Typically, the amplitude and frequency of bow pitching depend on the size and rate of change of the rudder angle. When the rudder angle increases, the bow pitching response becomes more pronounced, and the vessel’s rotation speed accelerates. Conversely, when the rudder angle decreases, the bow pitching response weakens, and the rotation speed decreases. Therefore, by accurately controlling the rudder angle, the bow pitching motion of the USV can be effectively adjusted to achieve smooth navigation.
According to the literature [
22], the expression in yaw direction can be expressed in the following form:
where
are time parameters;
is angular velocity;
is nonlinear coefficients;
is gain coefficients;
is rudder angle;
is rudder deflection angle. The input
and output
of the second-order nonlinear Nomoto model of the USV can both be measured by the sensors onboard the USV. In this case, the maneuvering coefficients in the Nomoto model can be determined through parameter identification methods.
2.2. The Construction of the Identification Model
Parameter identification relies on the development of an identification model that accurately reflects the input-output relationship of the USV. To simplify the analysis, the mathematical model is designed in a linearized form that represents the system’s input-output relationship as expressed below:
where
is the output matrix;
is the input matrix;
is the parameter matrix.
Since Equation (1) is a continuous model, it needs to be discretized. The heading angle
is typically easier to measure in actual navigation compared to other parameters. Therefore, the physical quantities in Equation (1) can be differentiated with respect to the heading angle using the forward difference method. The differentiation process is then substituted into the second-order nonlinear Nomoto model to complete the model discretization. Assuming that
, the expressions could be obtained by rearranging the terms:
where
is the time interval. To transform Equation (3) into Equation (2), the following matrix could be designed as follows:
where
is the output matrix of the USV Nomoto model;
is the input matrix;
is the parameter matrix.
Based on the experimental data, the input matrix and output matrix can be calculated, and then the parameter matrix can be identified. The specific parameter calculation formulas are as follows:
2.3. The Design of the LWR Filtering Algorithm
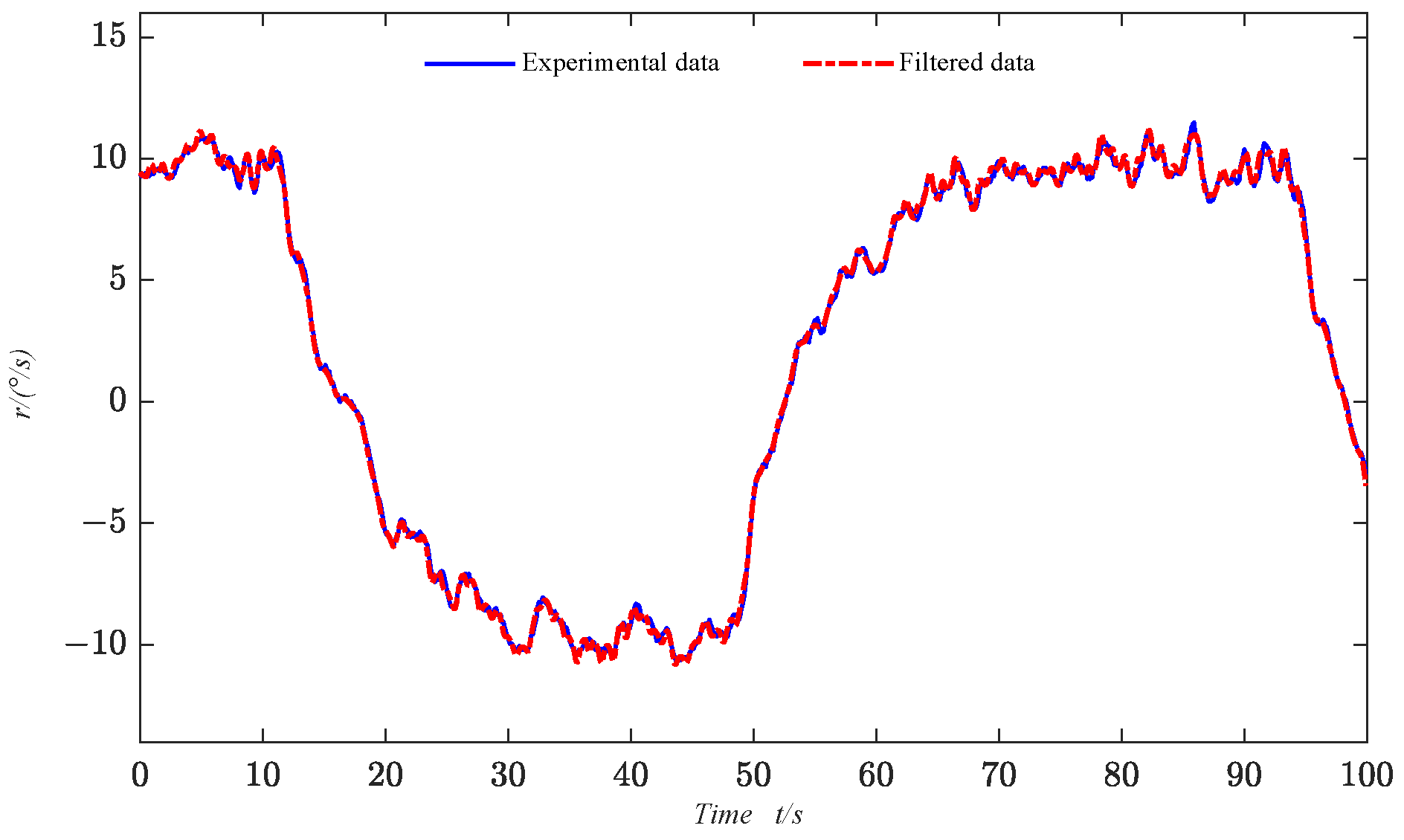
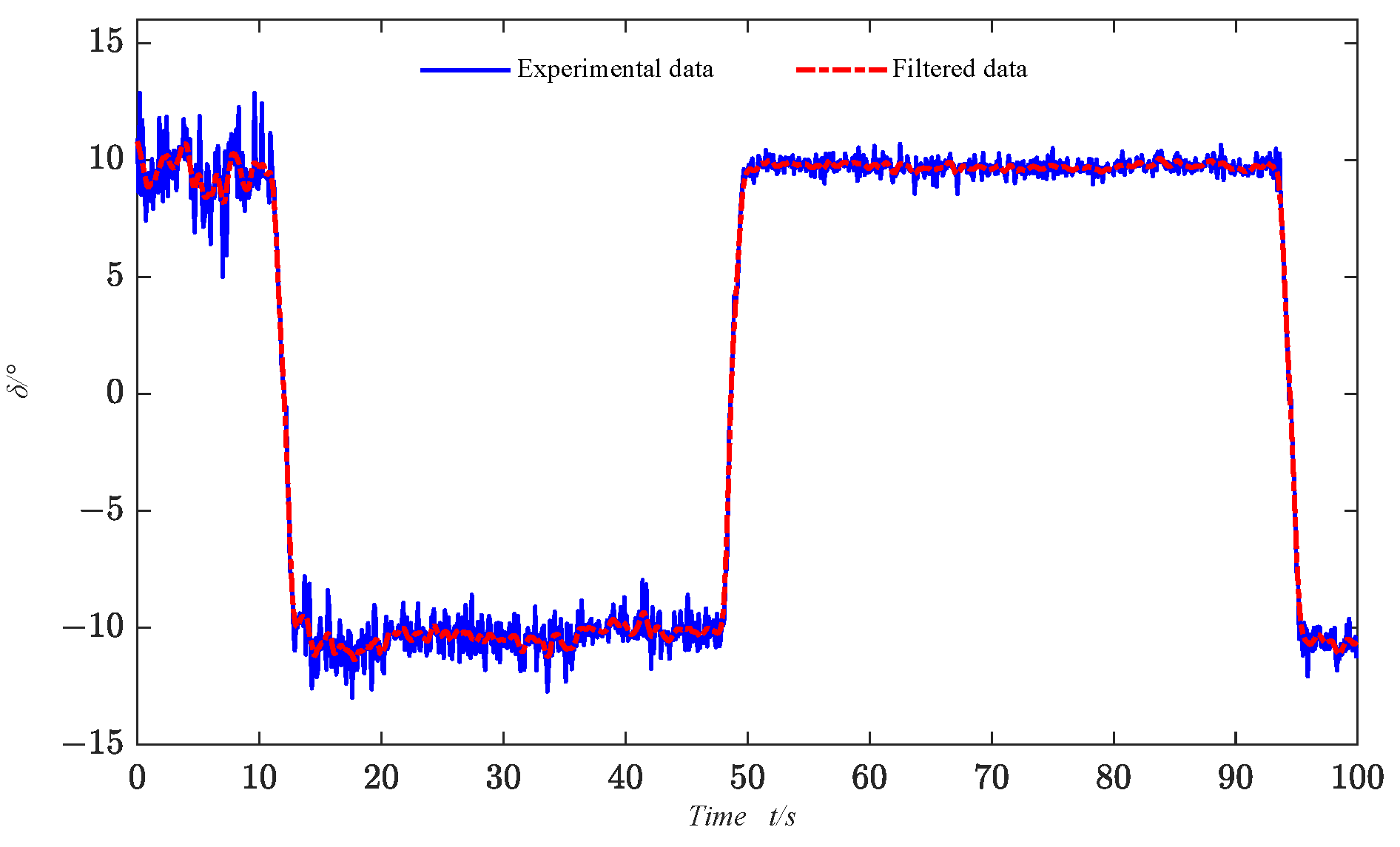
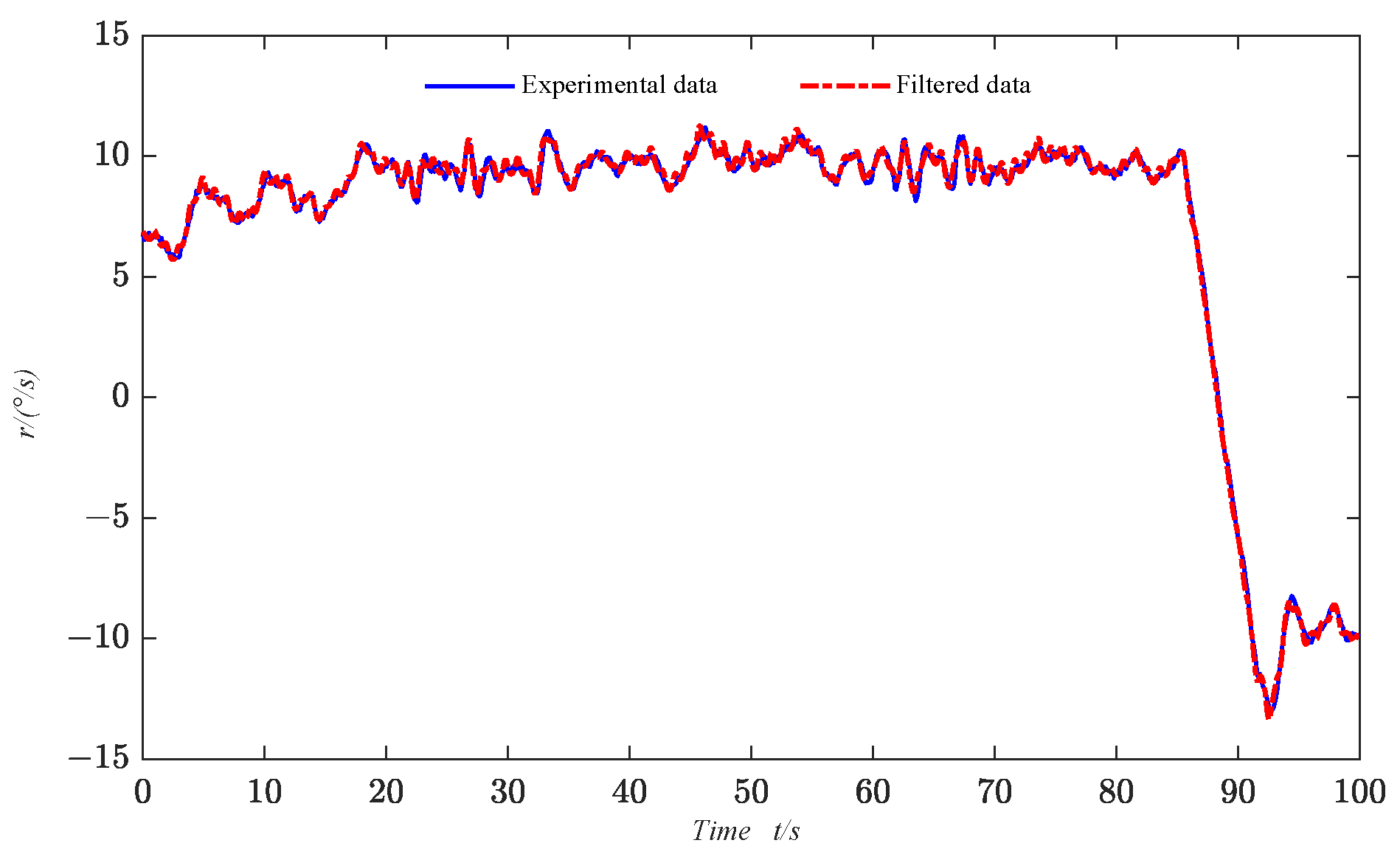
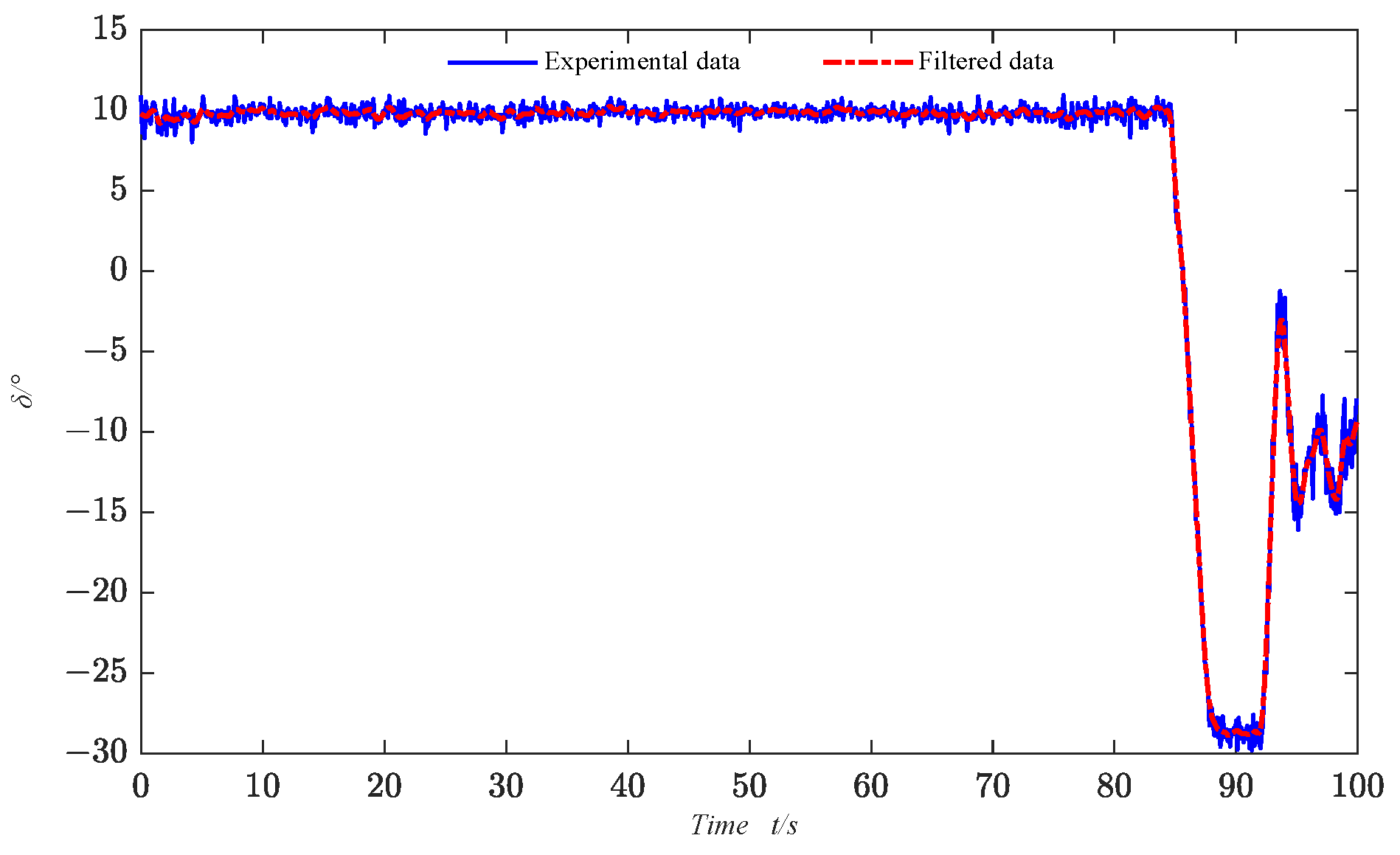
Various environmental and external uncertainties interfere with the USV’s motion during navigation, and there may be mutual influences between sensors. As a result, the collected motion state data often contain various disturbances. To improve the parameter identification results and obtain a more accurate USV maneuvering model, the sensor data are filtered. In this paper, the LWR filtering algorithm is employed to process the data.
Assuming the number of sampled data is denoted as
and the total number of data is
, to facilitate the selection of the fitting position,
is chosen as an odd number. The equation at the fitting position is then defined as:
where
is the time coordinate at the fitting point within the data window, and
represents the random fitting error.
is the parameter vector of the equation at the fitting point.
To obtain the parameter vector, weighted regression is performed on the data within the data window. In the actual filtering process, the weight at each position within the data window is determined by its distance from the fitting point. Typically, the farther the position is from the fitting point, the smaller the weight. Therefore, a cubic weighting function is used to determine the weights:
where
are time coordinates of each point within the data window.
After obtaining the weights for each position using Equation (7), a WLS algorithm is designed to estimate the coefficients in Equation (6). The following three matrices are defined based on the experimental data:
According to Equations (6) and (8), the objective function for parameter
can be expressed as:
Based on the fundamental principle of the LS method, the solution formula for parameter
can be expressed as:
According to Equation (10), the coefficients in Equation (6) can be obtained, which in turn leads to the complete filtering equation that allows the filtering of the USV motion data required for identification as described in Equation (6).
3. The Design of the EKF Algorithm
Assuming that the state equation of a discrete nonlinear system is given as follows:
where
is the state vector;
is the n-dimensional nonlinear state vector transfer function;
is the output vector;
is the m-dimensional nonlinear vector-valued function;
and
are the system process noise and measurement noise, respectively, both being Gaussian white noises with zero mean.
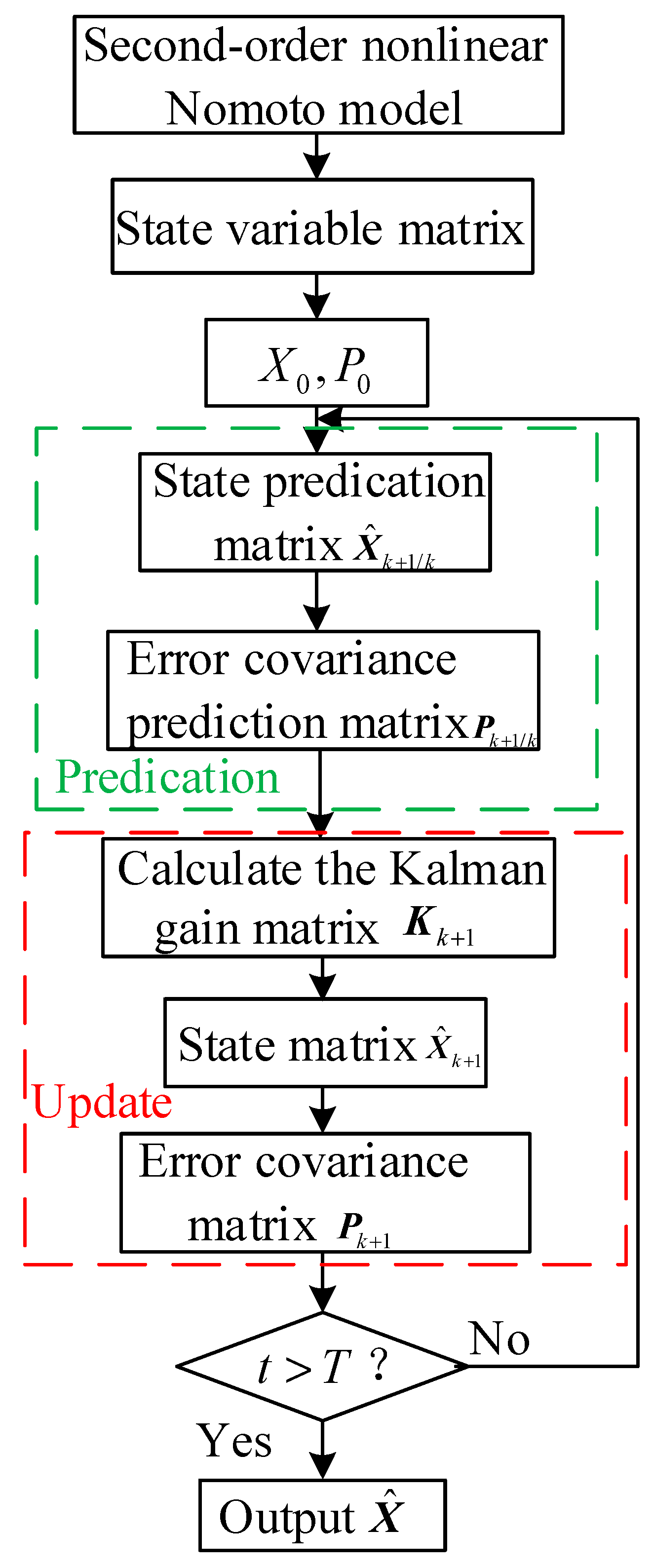
The recursive process for the parameter estimation of the system based on the EKF algorithm is shown in the following
Figure 1:
When parameter identification is performed based on the EKF algorithm, the parameters to be identified need to be included in the state vector, and the identification parameters are obtained through the overall estimation of the state variables. The EKF algorithm is mainly divided into prediction and update phases, with the specific calculation formulas for each stage shown as follows:
(1) The prediction phase includes the calculation of the state matrix
and the error covariance matrix
:
(2) The update phase includes the calculation of the Kalman gain matrix
, as well as the update of the state matrix
and the error covariance matrix
:
In the above process, both the state equation and the measurement equation are utilized. The EKF algorithm performs measurement updates based on the measurement equation, allowing the measurement data to correct the state error and achieve higher estimation accuracy.
When designing the state vector, the parameters
and
to be identified in Equation (4) need to be combined into a new system state variable
:
where
can be written as follows:
The state transition matrix of the system can be expressed as:
The system state equation can be obtained from Equations (14) and (16) as follows:
Assuming the observation matrix can be written as follows:
Combining Equations (17) and (18), the observation matrix can be obtained as follows:
After constructing the state equation and observation equation, the parameters in the second-order nonlinear Nomoto model can be identified through the EKF algorithm process.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}