



A Parcel Transportation and Delivery Mechanism for an Indoor Omnidirectional Robot



Abstract
1. Introduction
2. Materials and Methods
3. Design of the Transportation and Delivery Mechanism
3.1. Requirements of the Transportation and Delivery Mechanism
3.2. Requirements for the Automatic Unloading of Parcels
3.3. Requirements for Robot Compatibility
3.4. Analysis of the Parcels Received in an Educational Building
3.5. Location of the Transportation Area in the Robot
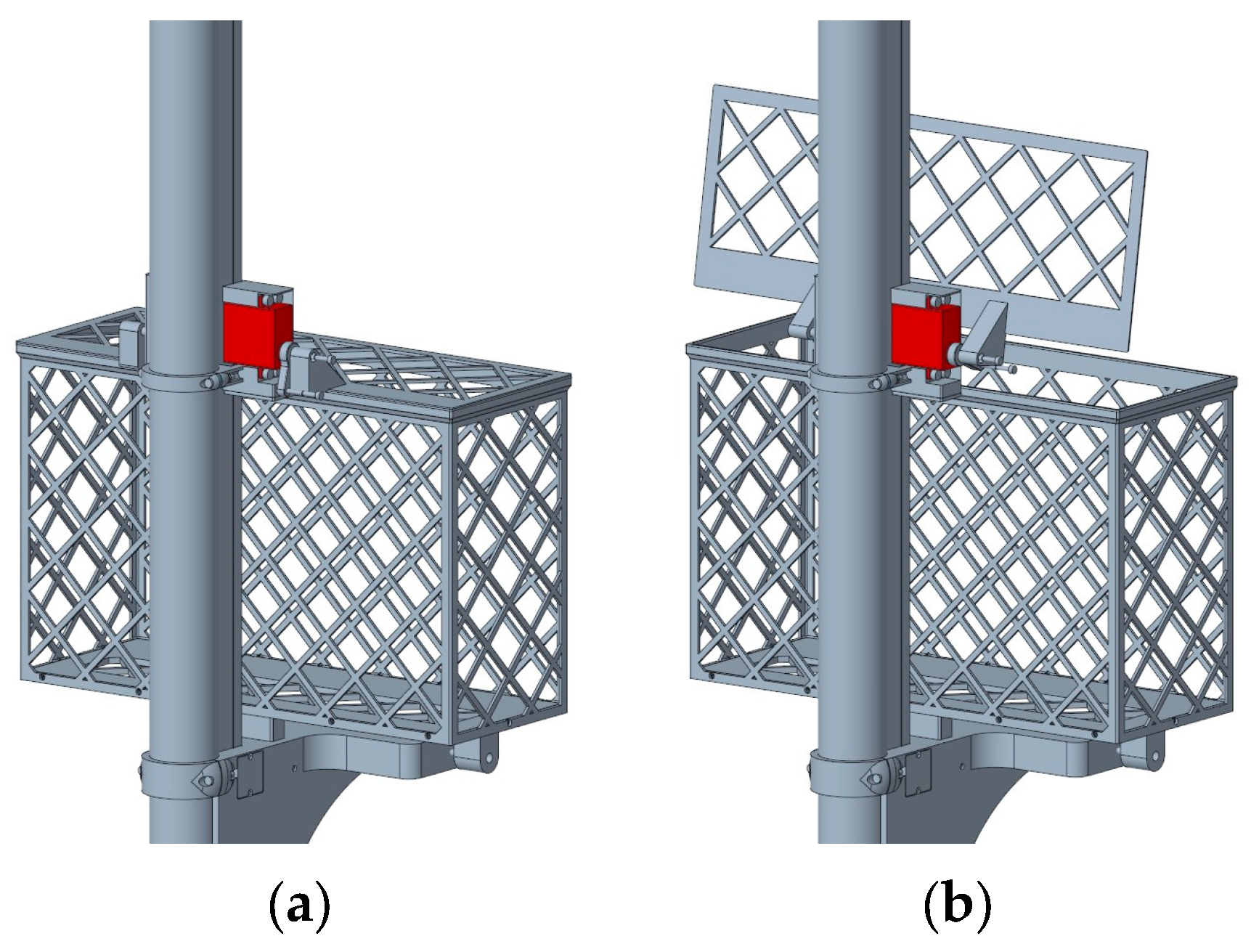
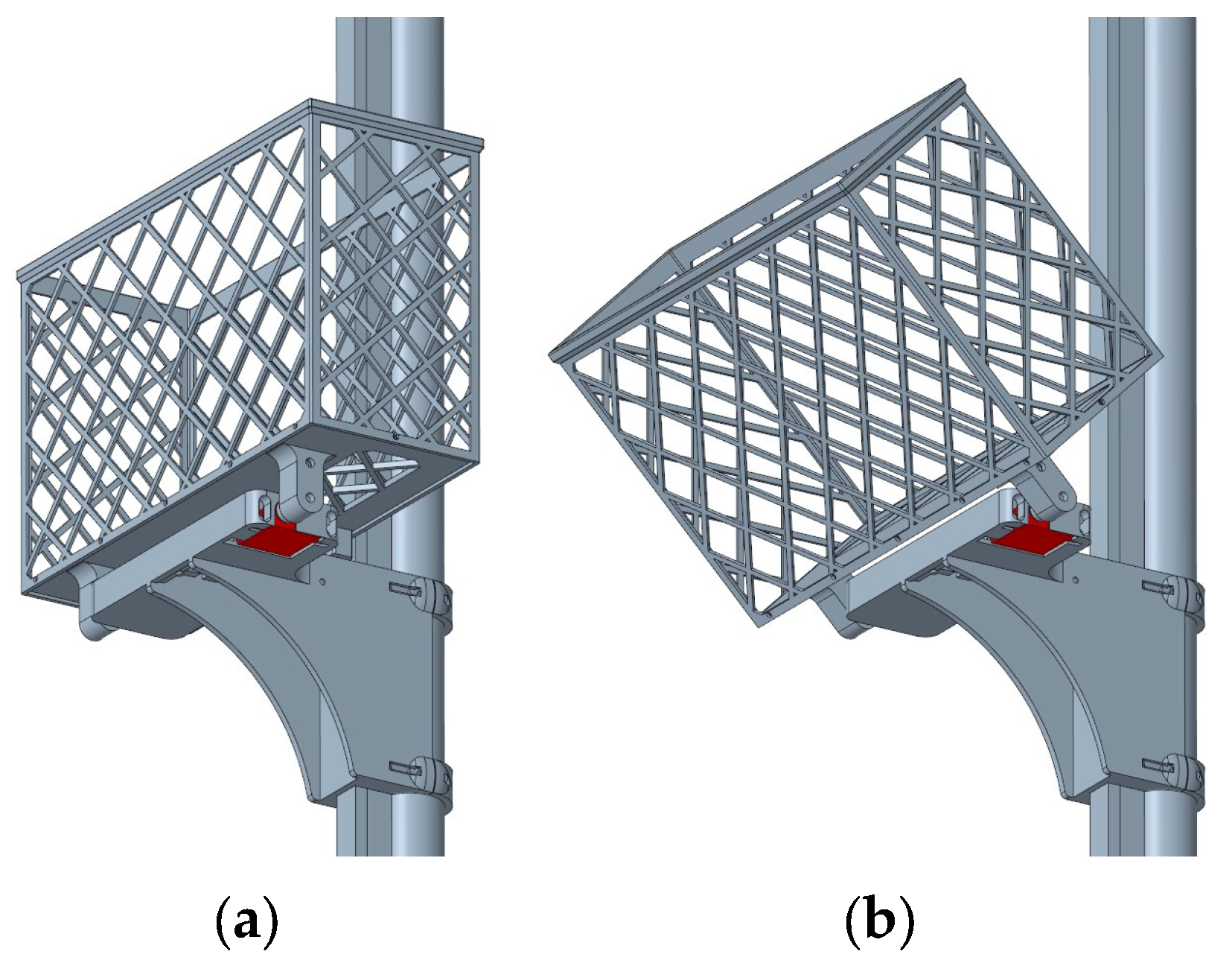
3.6. Design of the Transportation and Delivery Device
3.7. Parcel Loading Procedure
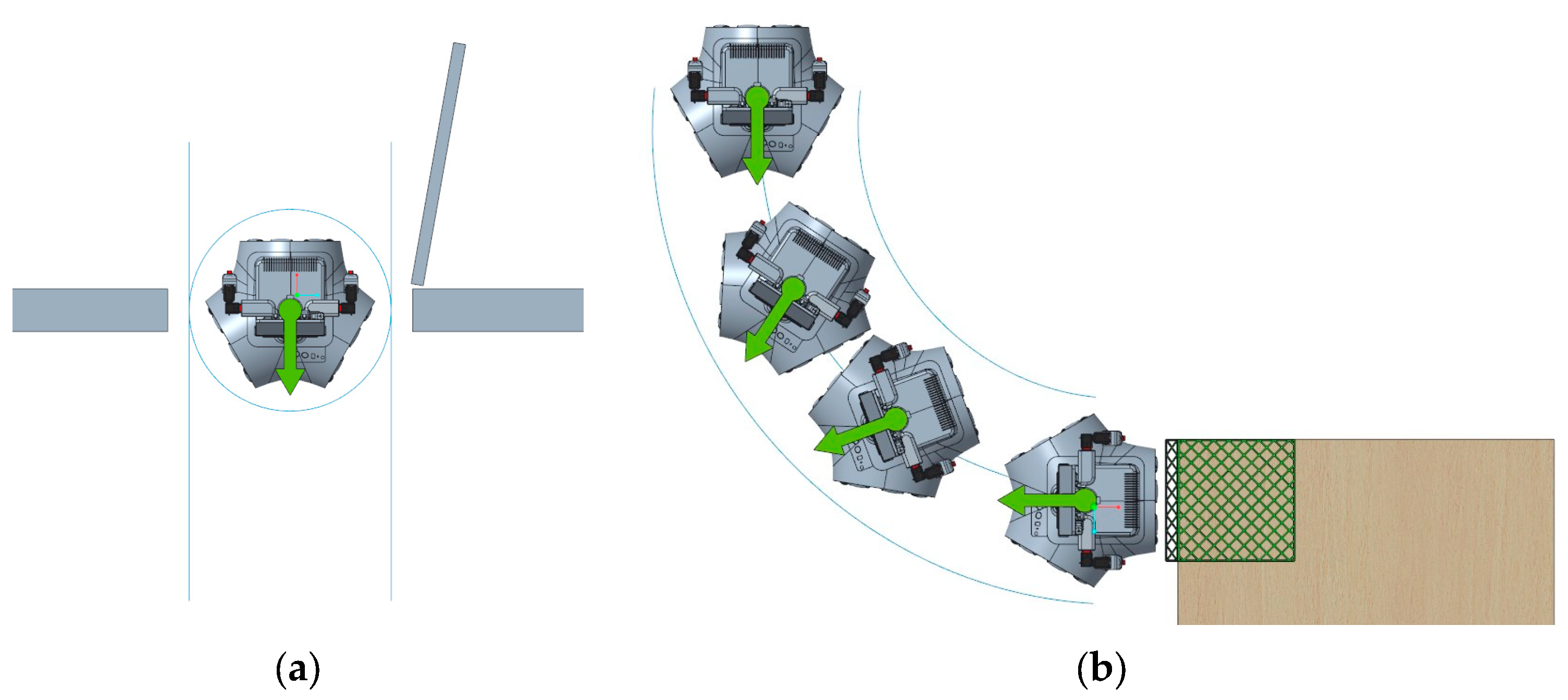
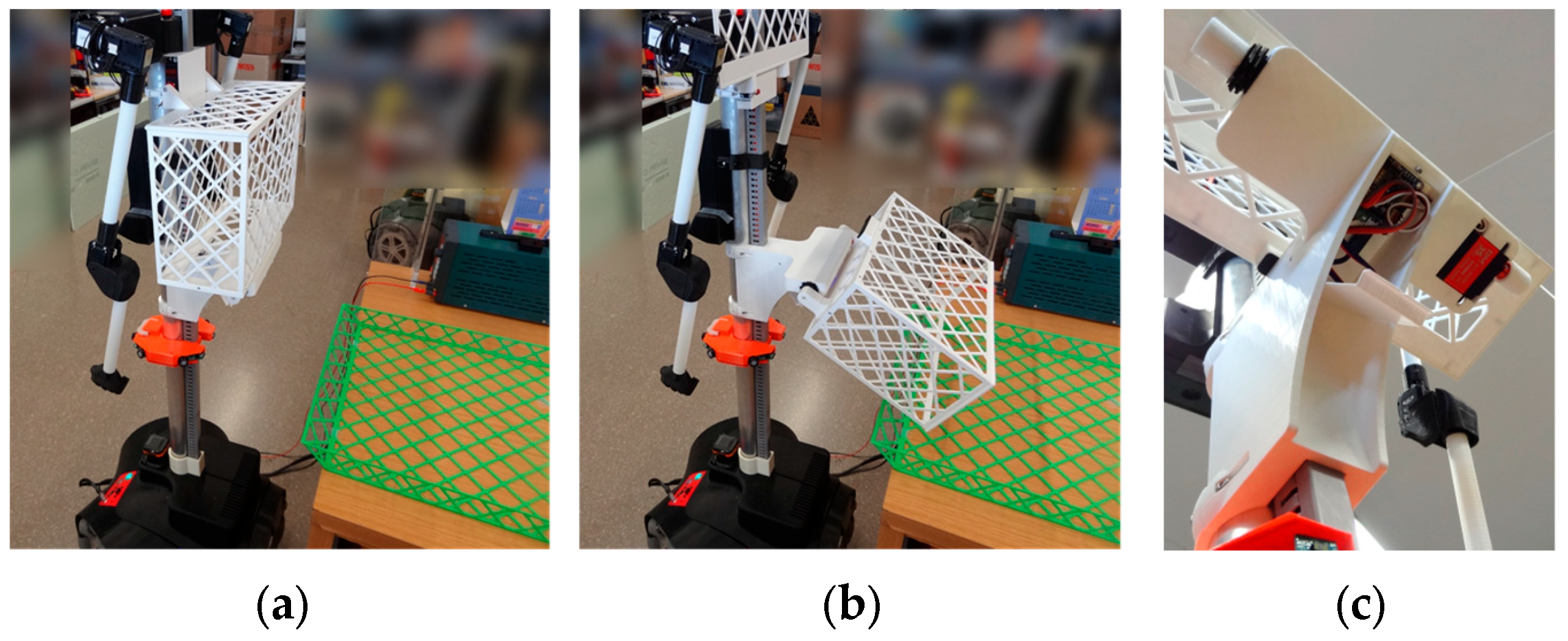
3.8. Parcel Unloading Procedure
4. Implementation
5. Results
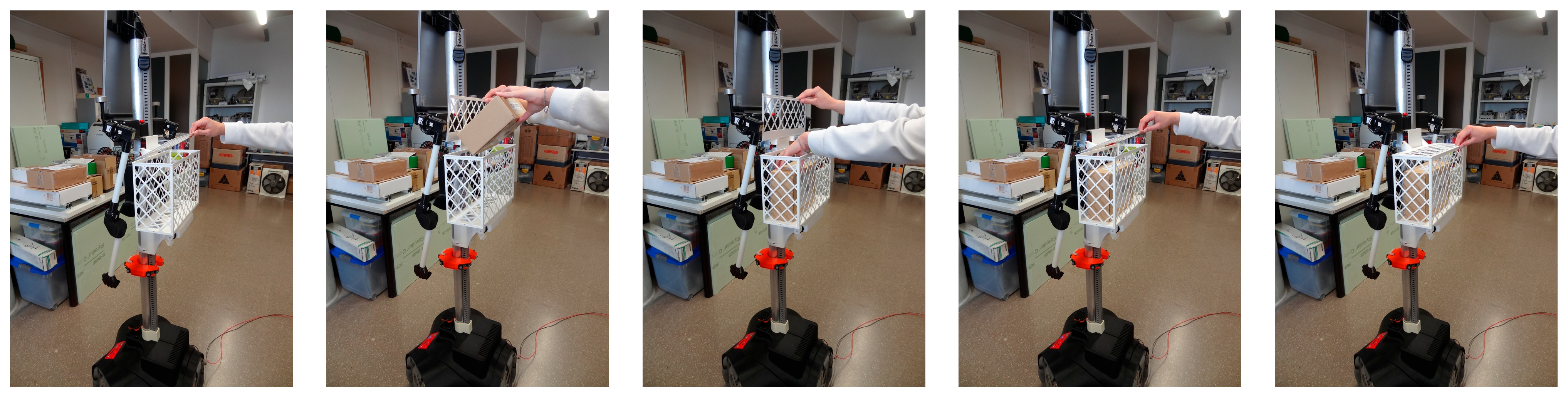
5.1. Experiments on Manual Parcel Loading
5.2. Preliminary Experiments on Parcel Unloading

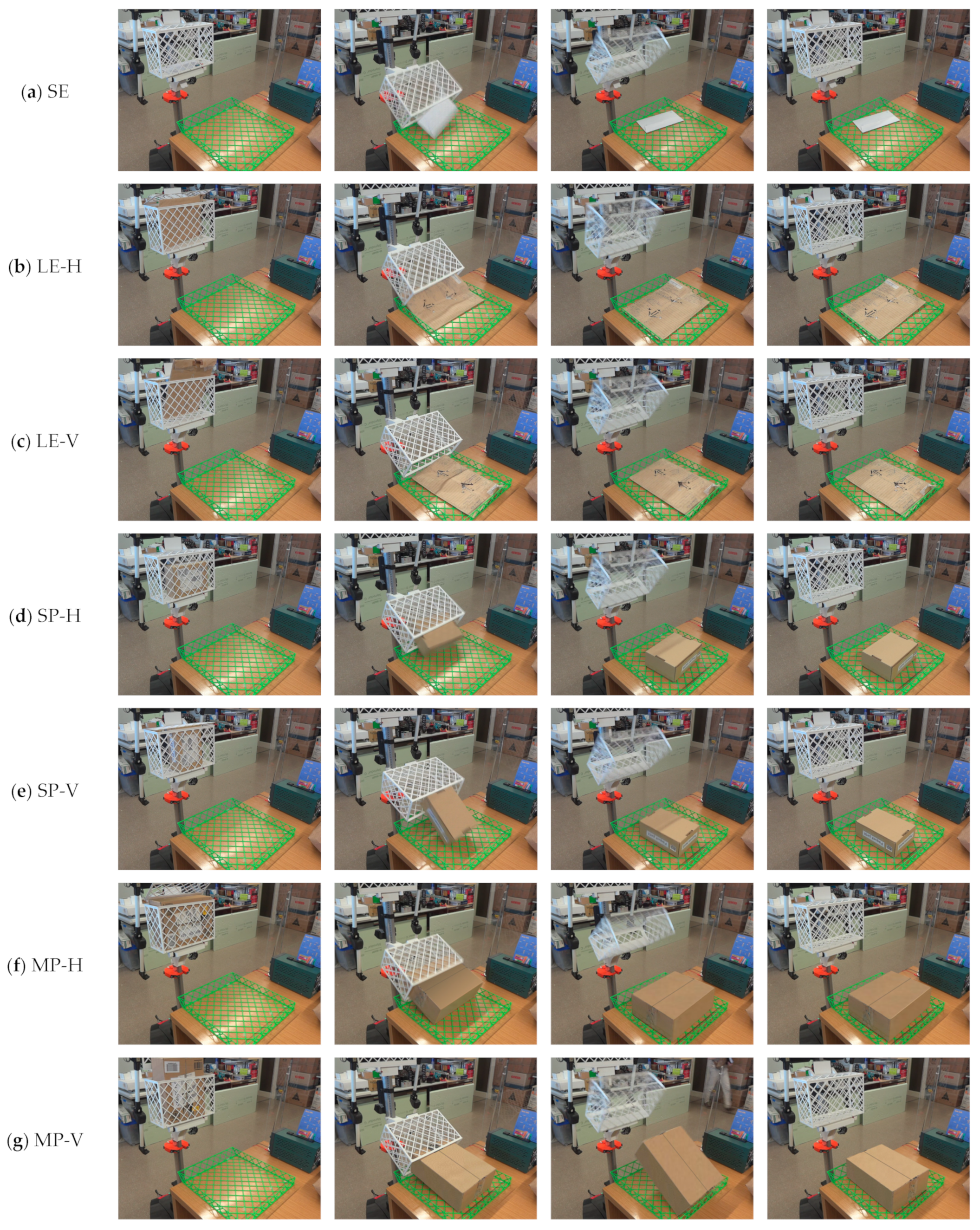
5.3. Experiments on Automatic Parcel Unloading
5.4. Experiments on Parcel Transportation and Delivery

6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Coppola, D. Annual Retail E-Commerce Sales Growth Worldwide from 2017 to 2027. Available online: https://www.statista.com/statistics/288487/forecast-of-global-b2c-e-commerce-growth/ (accessed on 19 September 2023).
- Leyerer, M.; Sonneberg, M.-O.; Heumann, M.; Breitner, M.H. Decision Support for Sustainable and Resilience-Oriented Urban Parcel Delivery. EURO J. Decis. Process. 2019, 7, 267–300. [Google Scholar] [CrossRef]
- Chen, M.-C.; Wu, P.-J.; Hsu, Y.-H. An Effective Pricing Model for the Congestion Alleviation of E-Commerce Logistics. Comput. Ind. Eng. 2019, 129, 368–376. [Google Scholar] [CrossRef]
- Cárdenas, I.; Beckers, J.; Vanelslander, T.; Verhetsel, A. Spatial Characteristics of Failed and Successful E-Commerce Deliveries in Belgian Cities. In Proceedings of the 6th International Conference on Information Systems, Logistics and Supply Chain, Bordeaux, France, 1–4 June 2016. [Google Scholar]
- Dablanc, L.; Diziain, D.; Levifve, H. Urban Freight Consultations in the Paris Region. Eur. Transp. Res. Rev. 2011, 3, 47–57. [Google Scholar] [CrossRef]
- Jiang, L.; Mahmassani, H.S. City Logistics: Freight Distribution Management with Time-Dependent Travel Times and Disruptive Events. Transp. Res. Rec. 2014, 2410, 85–95. [Google Scholar] [CrossRef]
- Boysen, N.; Fedtke, S.; Schwerdfeger, S. Last-Mile Delivery Concepts: A Survey from an Operational Research Perspective. OR Spectr. 2021, 43, 1–58. [Google Scholar] [CrossRef]
- Anderluh, A.; Hemmelmayr, V.C.; Rüdiger, D. Analytic Hierarchy Process for City Hub Location Selection—The Viennese Case. Transp. Res. Procedia 2020, 46, 77–84. [Google Scholar] [CrossRef]
- Li, L.; He, X.; Keoleian, G.A.; Kim, H.C.; De Kleine, R.; Wallington, T.J.; Kemp, N.J. Life Cycle Greenhouse Gas Emissions for Last-Mile Parcel Delivery by Automated Vehicles and Robots. Environ. Sci. Technol. 2021, 55, 11360–11367. [Google Scholar] [CrossRef] [PubMed]
- Himstedt, B.; Meisel, F. Parcel Delivery Systems for City Logistics: A Cost-Based Comparison between Different Transportation Technologies. J. Logist. Res. 2023, 16, 3. [Google Scholar] [CrossRef]
- Mohammad, W.A.; Nazih Diab, Y.; Elomri, A.; Triki, C. Innovative Solutions in Last Mile Delivery: Concepts, Practices, Challenges, and Future Directions. Supply Chain Forum: Int. J. 2023, 24, 151–169. [Google Scholar] [CrossRef]
- Ostermeier, M.; Heimfarth, A.; Hübner, A. The Multi-Vehicle Truck-and-Robot Routing Problem for Last-Mile Delivery. Eur. J. Oper. Res. 2023, 310, 680–697. [Google Scholar] [CrossRef]
- Fragapane, G.; de Koster, R.; Sgarbossa, F.; Strandhagen, J.O. Planning and Control of Autonomous Mobile Robots for Intralogistics: Literature Review and Research Agenda. Eur. J. Oper. Res. 2021, 294, 405–426. [Google Scholar] [CrossRef]
- Kim, J.; Moon, H.; Jung, H. Drone-Based Parcel Delivery Using the Rooftops of City Buildings: Model and Solution. Appl. Sci. 2020, 10, 4362. [Google Scholar] [CrossRef]
- Galindo, C.; Fernández-Madrigal, J.-A.; González, J.; Saffiotti, A. Robot Task Planning Using Semantic Maps. Robot. Auton. Syst. 2008, 56, 955–966. [Google Scholar] [CrossRef]
- Poeting, M.; Schaudt, S.; Clausen, U. A Comprehensive Case Study in Last-Mile Delivery Concepts for Parcel Robots. In Proceedings of the 2019 Winter Simulation Conference (WSC), National Harbor, MD, USA, 8–11 December 2019; pp. 1779–1788. [Google Scholar]
- Samouh, F.; Gluza, V.; Djavadian, S.; Meshkani, S.; Farooq, B. Multimodal Autonomous Last-Mile Delivery System Design and Application. In Proceedings of the 2020 IEEE International Smart Cities Conference (ISC2), Piscataway, NJ, USA, 28 September–1 October 2020; pp. 1–7. [Google Scholar]
- Gao, F.; Cheng, Y.; Gao, M.; Ma, C.; Liu, H.; Ren, Q.; Zhao, Z. Design and Implementation of an Autonomous Driving Delivery Robot. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 3832–3837. [Google Scholar]
- Langevin, A.; Mbaraga, P.; Campbell, J.F. Continuous Approximation Models in Freight Distribution: An Overview. Transp. Res. Part B Methodol. 1996, 30, 163–188. [Google Scholar] [CrossRef]
- Muñoz-Villamizar, A.; Velazquez-Martínez, J.C.; Caballero-Caballero, S. A Large-Scale Last-Mile Consolidation Model for e-Commerce Home Delivery. Expert Syst. Appl. 2024, 235, 121200. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Lauber, A.; Gunther, F.; Bellicoso, C.D.; Tsounis, V.; Fankhauser, P.; Diethelm, R.; Bachmann, S.; Bloesch, M.; et al. ANYmal—Toward Legged Robots for Harsh Environments. Adv. Robot. 2017, 31, 918–931. [Google Scholar] [CrossRef]
- Castillo, G.A.; Weng, B.; Zhang, W.; Hereid, A. Robust Feedback Motion Policy Design Using Reinforcement Learning on a 3D Digit Bipedal Robot. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 5136–5143. [Google Scholar]
- Sun, Y.; Guan, L.; Chang, Z.; Li, C.; Gao, Y. Design of a Low-Cost Indoor Navigation System for Food Delivery Robot Based on Multi-Sensor Information Fusion. Sensors 2019, 19, 4980. [Google Scholar] [CrossRef] [PubMed]
- Abrar, M.M.; Islam, R.; Shanto, M.A.H. An Autonomous Delivery Robot to Prevent the Spread of Coronavirus in Product Delivery System. In Proceedings of the 2020 11th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 28–31 October 2020; pp. 0461–0466. [Google Scholar]
- Kim, T.; Kang, G.; Lee, D.; Shim, D.H. Development of an Indoor Delivery Mobile Robot for a Multi-Floor Environment. IEEE Access 2024, 12, 45202–45215. [Google Scholar] [CrossRef]
- Limosani, R.; Esposito, R.; Manzi, A.; Teti, G.; Cavallo, F.; Dario, P. Robotic Delivery Service in Combined Outdoor–Indoor Environments: Technical Analysis and User Evaluation. Robot. Auton. Syst. 2018, 103, 56–67. [Google Scholar] [CrossRef]
- Park, S.; Ahn, S.; Shin, J.; Kim, H.; Yang, J.; Kim, Y.; Lim, K.; Seo, T. WAVE: Last Mile Delivery Robotic Platform With Stair-Climbing Ability Via Four-Bar Linkage-Based Locomotion. IEEE/ASME Trans. Mechatron. 2024, 29, 313–323. [Google Scholar] [CrossRef]
- Muramatsu, S.; Takahashi, K.; Tomizawa, T.; Kudoh, S.; Suehiro, T. Development of the Robust Delivery Robot System with the Unknown Object in Indoor Environment. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 8271–8276. [Google Scholar]
- AP Diddeniya, S.I.; Adikari, A.M.S.B.; Gunasinghe, H.N.; De Silva, P.R.S.; Ganegoda, N.C.; Wanniarachchi, W.K.I.L. Vision Based Office Assistant Robot System for Indoor Office Environment. In Proceedings of the 2018 3rd International Conference on Information Technology Research (ICITR), Moratuwa, Sri Lanka, 5–7 December 2018; pp. 1–6. [Google Scholar]
- Siao, C.-Y.; Lin, J.-W.; Chang, R.-G. The Design and Implementation of A Delivery System. In Proceedings of the 2020 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 23–25 October 2020; pp. 160–163. [Google Scholar]
- Lu, Y.; Liu, Y.; Bu, Q.; Lim, E.G.; Devaraj, R.; Zhang, Q.; Sun, J. An Autonomous Vehicle Platform for Parcel Delivery. In Proceedings of the 2023 28th International Conference on Automation and Computing (ICAC), Birmingham, UK, 30 August–1 September 2023; pp. 1–7. [Google Scholar]
- Naeem, M.; Ahmed, A.; Ayman, F.; Ahmed, M.; Adel, A.; Amr, Y.; Ashraf, M. Autonomous Delivery Rocker-Bogie Robot Using Gmapping Based SLAM Algorithm. Int. Res. J. Eng. Technol. (IRJET) 2022, 09, 1608–1619. [Google Scholar]
- Jean, J.-H.; Wei, C.-F.; Lin, Z.-W.; Lian, K.-Y. Development of an Office Delivery Robot with Multimodal Human-Robot Interactions. In Proceedings of the 2012 Proceedings of SICE Annual Conference (SICE), Akita, Japan, 20–23 August 2012; pp. 1564–1567.
- Choi, J.; Kim, M.; Kim, J.; Lee, W. Designing an Interactive Indoor Delivery Robot and Its Implications. In Robot Intelligence Technology and Applications 6; Kim, J., Englot, B., Park, H.-W., Choi, H.-L., Myung, H., Kim, J., Kim, J.-H., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 201–209. [Google Scholar]
- Cao, H.; Huang, X.; Zhuang, J.; Xu, J.; Shao, Z. CIoT-Robot Cloud and IoT Assisted Indoor Robot for Medicine Delivery; Atlantis Press: Dordrecht, The Netherlands, 2018; pp. 85–89. [Google Scholar]
- Vikhe, M.; Bothra, N.; Malaviya, N.; Kothari, M.; Koshti, R. Four Legged Parallel Manipulator for Autonomous Delivery Robot. In Proceedings of the 2023 International Conference on Device Intelligence, Computing and Communication Technologies, (DICCT), Dehradun, India, 17–18 March 2023; pp. 346–350. [Google Scholar]
- Kim, M.; Choi, D. Design and Development of a Variable Configuration Delivery Robot Platform. Int. J. Precis. Eng. Manuf. 2019, 20, 1757–1765. [Google Scholar] [CrossRef]
- Palacín, J.; Rubies, E.; Clotet, E. The Assistant Personal Robot Project: From the APR-01 to the APR-02 Mobile Robot Prototypes. Designs 2022, 6, 66. [Google Scholar] [CrossRef]
- Qian, J.; Zi, B.; Wang, D.; Ma, Y.; Zhang, D. The Design and Development of an Omni-Directional Mobile Robot Oriented to an Intelligent Manufacturing System. Sensors 2017, 17, 2073. [Google Scholar] [CrossRef] [PubMed]
- Crenganiș, M.; Breaz, R.-E.; Racz, S.-G.; Gîrjob, C.-E.; Biriș, C.-M.; Maroșan, A.; Bârsan, A. Fuzzy Logic-Based Driving Decision for an Omnidirectional Mobile Robot Using a Simulink Dynamic Model. Appl. Sci. 2024, 14, 3058. [Google Scholar] [CrossRef]
- Clotet, E.; Palacín, J. SLAMICP Library: Accelerating Obstacle Detection in Mobile Robot Navigation via Outlier Monitoring Following ICP Localization. Sensors 2023, 23, 6841. [Google Scholar] [CrossRef] [PubMed]
- Yokozuka, M.; Koide, K.; Oishi, S.; Banno, A. LiTAMIN: LiDAR-Based Tracking And Mapping by Stabilized ICP for Geometry Approximation with Normal Distributions. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5143–5150. [Google Scholar]
- Li, Y.; Dai, S.; Shi, Y.; Zhao, L.; Ding, M. Navigation Simulation of a Mecanum Wheel Mobile Robot Based on an Improved A* Algorithm in Unity3D. Sensors 2019, 19, 2976. [Google Scholar] [CrossRef] [PubMed]
- Palacín, J.; Clotet, E.; Martínez, D.; Martínez, D.; Moreno, J. Extending the Application of an Assistant Personal Robot as a Walk-Helper Tool. Robotics 2019, 8, 27. [Google Scholar] [CrossRef]
- Moreno, J.; Clotet, E.; Tresanchez, M.; Martínez, D.; Casanovas, J.; Palacín, J. Measurement of Vibrations in Two Tower-Typed Assistant Personal Robot Implementations with and without a Passive Suspension System. Sensors 2017, 17, 1122. [Google Scholar] [CrossRef]
- Silvestri, P.; Zoppi, M.; Molfino, R. Dynamic Investigation on a New Robotized Vehicle for Urban Freight Transport. Simul. Model. Pract. Theory 2019, 96, 101938. [Google Scholar] [CrossRef]
- Palacín, J.; Bitriá, R.; Rubies, E.; Clotet, E. A Procedure for Taking a Remotely Controlled Elevator with an Autonomous Mobile Robot Based on 2D LIDAR. Sensors 2023, 23, 6089. [Google Scholar] [CrossRef] [PubMed]
- Ministerio de Transportes, Movilidad y Agenda Urbana Código Técnico de la Edificación (CTE). Documento Básico—Seguridad de Utilización y Accesibilidad (DB-SUA). Available online: https://www.codigotecnico.org/DocumentosCTE/SeguridadUtilizacionAccesibilidad.html (accessed on 15 May 2024).
- van Duin, J.H.R.; Wiegmans, B.W.; van Arem, B.; van Amstel, Y. From Home Delivery to Parcel Lockers: A Case Study in Amsterdam. Transp. Res. Procedia 2020, 46, 37–44. [Google Scholar] [CrossRef]
- Merkert, R.; Bliemer, M.C.J.; Fayyaz, M. Consumer Preferences for Innovative and Traditional Last-Mile Parcel Delivery. Int. J. Phys. Distrib. Logist. Manag. 2022, 52, 261–284. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, S.; Liu, J.; Chen, F.; Li, L.; Xia, B. Research on a New Omnidirectional Mobile Platform with Heavy Loading and Flexible Motion. Adv. Mech. Eng. 2017, 9, 1687814017726683. [Google Scholar] [CrossRef]
- Gao, Z.Q.; Chen, H.B.; Du, Y.P.; Wei, L. Design and Development of an Omni-Directional Mobile Robot for Logistics. Appl. Mech. Mater. 2014, 602–605, 1006–1010. [Google Scholar] [CrossRef]
- Ranjbari, A.; Diehl, C.; Dalla Chiara, G.; Goodchild, A. What Is the Right Size for a Residential Building Parcel Locker? Transp. Res. Rec. 2023, 2677, 1397–1407. [Google Scholar] [CrossRef]
- Standish, R.K. Why Occam’s Razor. Found Phys Lett 2004, 17, 255–266. [Google Scholar] [CrossRef]
- Palacín, J.; Rubies, E.; Bitriá, R.; Clotet, E. Path Planning of a Mobile Delivery Robot Operating in a Multi-Story Building Based on a Predefined Navigation Tree. Sensors 2023, 23, 8795. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Label | Maximum Size: W (m) × L (m) × H (m) | Total Parcels | Share (%) |
|---|---|---|---|---|
| Small envelope | SE | 0.11 × 0.23 × 0.005 | 417 | 23.21 |
| Large envelope | LE | 0.26 × 0.36 × 0.01 | 653 | 36.34 |
| Very small parcel | VSP | 0.13 × 0.09 × 0.04 | 82 | 4.56 |
| Small parcel | SP | 0.23 × 0.14 × 0.08 | 250 | 13.91 |
| Medium parcel | MP | 0.32 × 0.22 × 0.13 | 209 | 11.63 |
| Large parcel | LP | 0.39 × 0.28 × 0.19 | 143 | 7.96 |
| Very large parcel | VLP | 0.50 × 0.30 × 0.30 | 43 | 2.39 |
| Location | Graphical Representation | Maximum Size: W (m) × D (m) × H (m) | Main Pros | Main Cons |
|---|---|---|---|---|
| A |  | 0.53 × 0.22 × 0.42 | Transportation zone height. | Interferences with frontal and ground cameras. Weight distribution and stability. |
| B |  | 0.53 × 0.22 × 0.42 | Weight distribution and stability. | Interferences with ground camera. Transportation zone height. |
| C |  | 0.53 × 0.18 × 0.44 | Transportation zone height. No camera interferences. | Weight distribution and stability. |
| D |  | 0.53 × 0.18 × 0.44 | No camera interferences. Weight distribution and stability. | Transportation zone height. |
| Mobile Robot | Action | Parcel | Experiments | Success |
|---|---|---|---|---|
| Stationary | Manual load | SE | 25 | 100% |
| LE | 25 | 100% | ||
| VSP | 25 | 100% | ||
| SP | 25 | 100% | ||
| MP | 25 | 100% | ||
| Requested semi-automatic load | SE | 25 | 100% | |
| LE | 25 | 100% | ||
| VSP | 25 | 100% | ||
| SP | 25 | 100% | ||
| MP | 25 | 100% |
| Mobile Robot | Action | Parcel | Experiments | Success |
|---|---|---|---|---|
| Stationary (placed in the delivery destination) | Automatic unload | SE | 25 | 100% |
| LE | 25 | 100% | ||
| VSP | 25 | 100% | ||
| SP | 25 | 100% | ||
| MP-H, horizontal | 25 | 68% | ||
| MP-V, vertical | 25 | 72% |
| Mobile Robot | (Step) Action | Parcel | Experiments | Success |
|---|---|---|---|---|
| Performing parcel transportation and delivery | (3) Manual load | SP | 25 | 100% |
| (7) Automatic unload | SP | 25 1 | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rubies, E.; Bitriá, R.; Palacín, J. A Parcel Transportation and Delivery Mechanism for an Indoor Omnidirectional Robot. Appl. Sci. 2024, 14, 7987. https://doi.org/10.3390/app14177987
Rubies E, Bitriá R, Palacín J. A Parcel Transportation and Delivery Mechanism for an Indoor Omnidirectional Robot. Applied Sciences. 2024; 14(17):7987. https://doi.org/10.3390/app14177987
Chicago/Turabian StyleRubies, Elena, Ricard Bitriá, and Jordi Palacín. 2024. "A Parcel Transportation and Delivery Mechanism for an Indoor Omnidirectional Robot" Applied Sciences 14, no. 17: 7987. https://doi.org/10.3390/app14177987
APA StyleRubies, E., Bitriá, R., & Palacín, J. (2024). A Parcel Transportation and Delivery Mechanism for an Indoor Omnidirectional Robot. Applied Sciences, 14(17), 7987. https://doi.org/10.3390/app14177987