
Transient Friction Analysis of Pressure Waves Propagating in Power-Law Non-Newtonian Fluids


Abstract
1. Introduction
2. Mathematical Model and Solution Method
2.1. Governing Equations
2.2. Initial Conditions
2.3. Boundary Conditions
2.4. Methods of Solution
2.4.1. Analytical Solution
2.4.2. Numerical Solution
3. Results and Discussion
3.1. Startup Flow
3.2. Pressure Waves Transmitted inside the Drill String
3.3. Transient Friction at the Wall
3.3.1. Influence of Stable Pipe Flow on the Wall Friction
3.3.2. Influence of Power-Law Index on the Wall Friction
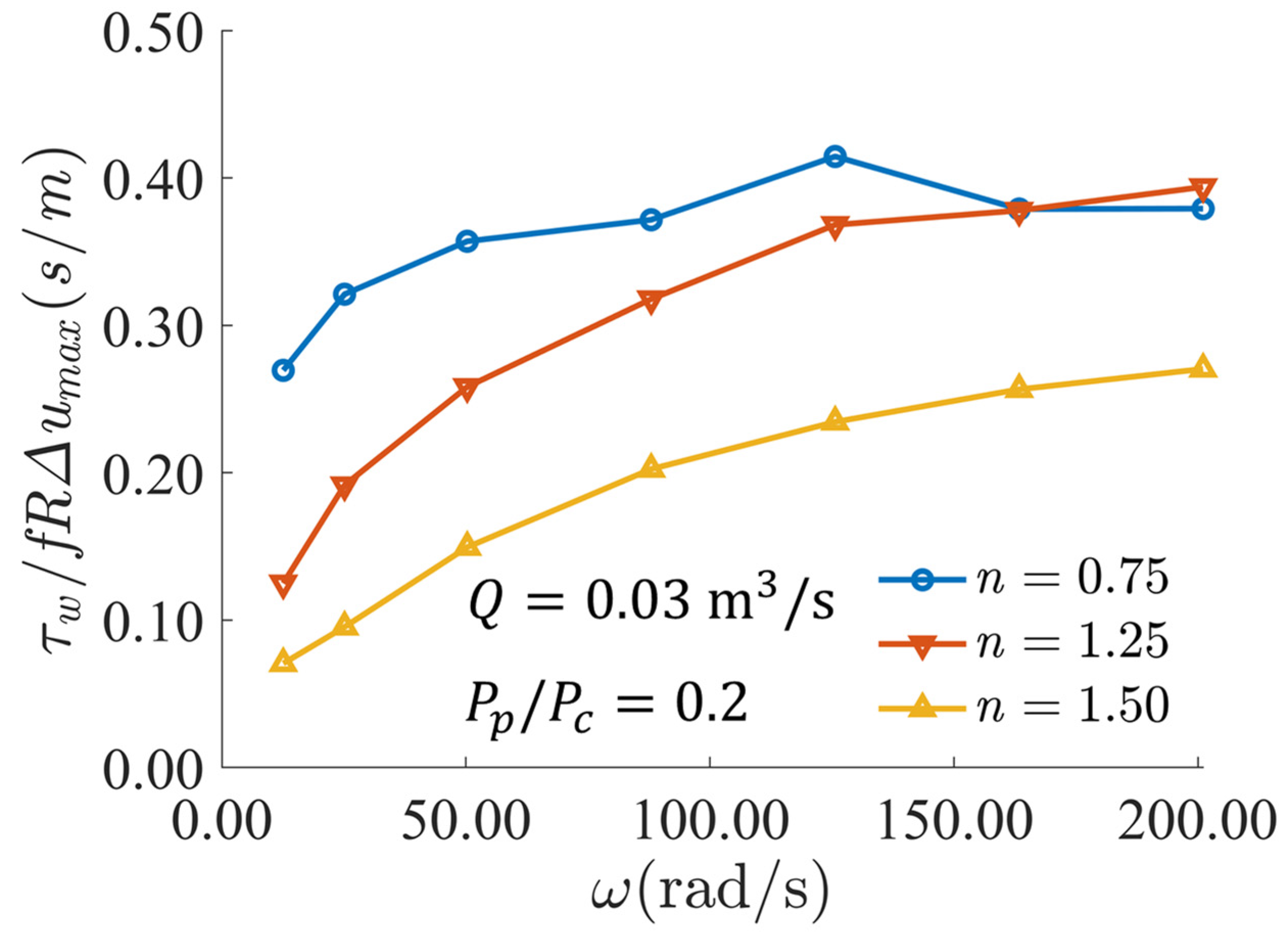
3.3.3. Influence of Frequency on the Wall Friction
4. Conclusions
- (1)
- The apparent viscosity of power-law non-Newtonian fluids is not only related to shear rate, but also to the square root of the pulsation frequency;
- (2)
- For Newtonian fluids, the ratio of the amplitude, , to the average, , of the pressure pulsation will not affect the distribution of pulsating shear stress. However, for non-Newtonian fluids, the ratio of the amplitude to the average of the pressure pulsation has different effects on the wall shear stress. Moreover, even under the same ratio, for , an increase in the average pressure pulsation will reduce the wall shear stress;
- (3)
- Because an increase in frequency leads to a decrease in velocity fluctuations, the pulsating shear stress at the wall decreases monotonically with the increase in frequency, regardless of how the flow rate and power-law index change.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Klotz, C.; Bond, P.; Wasserman, I.; Priegnitz, S. A new mud pulse telemetry system for enhanced MWD/LWD applications. In Proceedings of the IADC/SPE Drilling Conference, Orlando, FL, USA, 4–6 March 2008. IADC/SPE Paper 112683-MS. [Google Scholar]
- Mwachaka, S.M.; Wu, A.P.; Fu, Q.Q. A review of mud pulse telemetry signal impairments modeling and suppression methods. J. Pet. Explor. Prod. Technol. 2019, 9, 779–792. [Google Scholar] [CrossRef]
- Ma, D.; Shi, Y.B.; Zhang, W.; Liu, G.Z. Design of acoustic transmission along drill strings for logging while drilling data based on adaptive NC-OFDM. AEU-Int. J. Electron. Commun. 2018, 83, 329–338. [Google Scholar] [CrossRef]
- Han, H.; Xue, L.; Fan, H.H.; Liu, X.B.; Liu, M.; Wang, Z.M. Analysis of pressure wave signal generation in MPT: An integrated model and numerical simulation approach. J. Pet. Sci. Eng. 2022, 209, 109871. [Google Scholar] [CrossRef]
- Yang, N.; Yan, Z.D.; Yin, X.; Jia, M.Z.; Geng, Y.F. Mathematical modeling and experimental investigation of a rotary valve generating sinusoidal pressure signals based on fan-arc-straight orifice. J. Pet. Sci. Eng. 2022, 209, 109807. [Google Scholar] [CrossRef]
- Yan, Z.D.; Sun, R.R.; Jiang, S.M.; Song, T.T.; Gao, T.Z. Improved variable step adaptive filtering algorithm and its application in time delay estimation for continuous wave dual-sensor pulse signals. Geoenergy Sci. Eng. 2023, 230, 212268. [Google Scholar] [CrossRef]
- Jiang, S.M.; Yan, Z.D.; Sun, R.R.; Wang, Z.D.; Sun, H.H. Study on signal decomposition-based pump noise cancellation method for continuous-wave mud pulse telemetry. Geoenergy Sci. Eng. 2023, 228, 211948. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Bergant, A.; Stosiak, M.; Deptuła, A.; Karpenko, M.; Kubrak, M.; Kodura, A. Water Hammer Simulation Using Simplified Convolution-Based Unsteady Friction Model. Water 2022, 14, 3151. [Google Scholar] [CrossRef]
- Chen, S.J.; Aumann, J.T. Numerical simulation of MWD pressure pulse transmission. In Proceedings of the SPE Annual Technical Conference and Exhibition, Las Vegas, NV, USA, 22–26 September 1985. SPE Paper 14324-MS. [Google Scholar]
- Desbrandes, R.; Bourgoyne, A.T.; Carter, J.A. MWD transmission data rates can be optimized. Pet. Eng. Int. 1987, 59, 46–52. [Google Scholar]
- Liu, Q.L.; Wu, J.F.; Liu, W.T.; Wang, R.H. A frequency-domain propagation model of bypass downlink system with transfer matrix method. J. Pet. Sci. Eng. 2017, 159, 724–730. [Google Scholar] [CrossRef]
- Lea, S.H.; Kyllingstad, A. Propagation of coupled pressure waves in borehole with drillstring. In Proceedings of the International Conference on Horizontal Well Technology, Calgary, AB, Canada, 18–20 November 1996. SPE Paper 37156. [Google Scholar]
- Li, H.T.; Chen, R.M.; Li, X.J.; Meng, Y.F.; Zhu, L.; Zhao, J.B. Investigation of pressure wave propagation and attenuation characteristics in wellbore gas-liquid two-phase flow. J. Nat. Gas Sci. Eng. 2016, 35, 1088–1100. [Google Scholar] [CrossRef]
- Jia, M.Z.; Geng, Y.F.; Yan, Z.D.; Zeng, Q.F.; Wang, W.L.; Yue, Y.B. Channel modelling and characterization for mud pulse telemetry. Int. J. Electron. Commun. 2023, 165, 154654. [Google Scholar] [CrossRef]
- Wang, X.; Wang, R.H.; Ji, G.D. Frequency-dependent friction model for consecutive pulse signal of drilling fluid transmitting in borehole. Acta Pet. Sin. 2009, 30, 444–449. [Google Scholar]
- Oliveira, G.M.; Negrao, C.O.R.; Franco, A.T. Pressure transmission in Bingham fluids compressed within a closed pipe. J. Non-Newton. Fluid Mech. 2012, 169–170, 121–125. [Google Scholar] [CrossRef]
- Oliveira, G.M.; Franco, A.T.; Negrao, C.O.R.; Martins, A.L.; Silva, R.A. Modeling and validation of pressure propagation in drilling fluids pumped into a closed well. J. Pet. Sci. Eng. 2013, 103, 61–71. [Google Scholar] [CrossRef]
- Wu, J.F.; Wang, R.H.; Zhang, R.; Sun, F. Propagation model with multi-boundary conditions for periodic mud pressure wave in long wellbore. Appl. Math. Model. 2015, 39, 7643–7656. [Google Scholar] [CrossRef]
- Himr, D.; Haban, V.; Fialova, S. Influence of second viscosity on pressure pulsation. Appl. Sci. 2019, 9, 5444. [Google Scholar] [CrossRef]
- Santos, T.G.M.; Oliveira, G.M.; Negrao, C.O.R. Dimensionless analysis of non-Newtonian Power-Law fluid hammer. J. Hydraul. Eng. 2023, 149, 04023034. [Google Scholar] [CrossRef]
- Oliveira, G.M.; Franco, A.T.; Negrao, C.O.R.; Vadinal, R.B.; Lomba, B.S.; Fonseca, T.U.; Martins, A.L. Pressure Transmission in Gelled Drilling Fluids. In Proceedings of the SPE/IADC Drilling Conference and Exhibition, London, UK, 17–19 March 2015. SPE/IADC Paper 173128-MS. [Google Scholar]
- Jia, P.; Fang, J. Frequency-dependent friction for non-Newtonian power-law fluid in transient pipe flow. In Advances in Engineering Research, Proceedings of the 5th International Conference on Mechanical Engineering, Materials and Energy (ICMEME 2016), 10–11 December 2016, Hong Kong, China; Atlantis Press: Amsterdam, The Netherlands, 2016; Volume 90, pp. 63–67. [Google Scholar]
- Sun, X.F.; Zhang, K.B.; Chen, Y.; Li, W.; Qu, J.Y. Study on the settling velocity of drilling cuttings in the power law fluid. Powder Technol. 2020, 362, 278–287. [Google Scholar] [CrossRef]
- Quitian-Ardila, L.H.; Andrade, D.E.V.; Franco, A.T. A proposal for a constitutive equation fitting methodology for the rheological behavior of drilling fluids at different temperatures and high-pressure conditions. Geoenergy Sci. Eng. 2024, 233, 212570. [Google Scholar] [CrossRef]
- Li, Z.M.; Tai, G.Y. Non-Newtonian Fluid Mechanics; China University of Petroleum Press: Shandong, China, 1998; pp. 74–81. [Google Scholar]
- Han, H.; Xue, L.; Sun, L.W.; Sheng, W.K.; Fan, H.H.; Wang, Z.M. A transient flow analysis method for high-rate mud pulse telemetry in rotary steerable system. Geoenergy Sci. Eng. 2024, 232, 212392. [Google Scholar] [CrossRef]
- Dokhani, V.; Ma, Y.; Li, Z.L.; Geng, T.; Yu, M.J. Effects of drill string eccentricity on frictional pressure losses in annuli. J. Pet. Sci. Eng. 2020, 187, 106853. [Google Scholar] [CrossRef]
- Jia, P.; Gao, D.L.; Fang, J. Analysis of signal attenuation of continuous wave in drill string. Res. J. Appl. Sci. Eng. Technol. 2013, 5, 4018–4022. [Google Scholar] [CrossRef]
- Zielke, W. Frequency-dependent friction in transient pipe flow. J. Basic Eng. 1968, 90, 109–115. [Google Scholar] [CrossRef]
- White, F.M. Viscous Fluid Flow, 2nd ed.; McGraw-Hill: New York, NY, USA, 1991; pp. 133–134. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| ) | 1220 |
| , (m) | 0.05431 |
| ) | 1.0 |
| 0.25~1.75 | |
| ) | 0.03 |
| ) | 0.5~2.0 |
| = 0.5 | = 1.5 | ||||
|---|---|---|---|---|---|
| Time (s) | (1/s) | (Pa·s) | Time (s) | (1/s) | (Pa·s) |
| 32.10 | 0.176 | 0.02 | 75.00 | 8.659 | |
| 88.60 | 0.106 | 0.05 | 111.8 | 10.57 | |
| 149.8 | 0.082 | 0.10 | 139.1 | 11.79 | |
| (Stable) | 204.9 | 0.070 | (Stable) | 157.7 | 12.56 |
| Number of collocation points | |||||
| Relative error (%) | −0.28 | −0.23 | −0.12 | −0.09 | 0.06 |
| Time step (s) | |||||
| Relative error (%) | 0.875 | 0.123 | 0.119 | 0.073 | 0.069 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Ruan, C.; Su, Y.; Jia, P.; Wen, H.; Zhu, X. Transient Friction Analysis of Pressure Waves Propagating in Power-Law Non-Newtonian Fluids. Appl. Sci. 2024, 14, 6331. https://doi.org/10.3390/app14146331
Li H, Ruan C, Su Y, Jia P, Wen H, Zhu X. Transient Friction Analysis of Pressure Waves Propagating in Power-Law Non-Newtonian Fluids. Applied Sciences. 2024; 14(14):6331. https://doi.org/10.3390/app14146331
Chicago/Turabian StyleLi, Hang, Chenliang Ruan, Yanlin Su, Peng Jia, Haojia Wen, and Xiuxing Zhu. 2024. "Transient Friction Analysis of Pressure Waves Propagating in Power-Law Non-Newtonian Fluids" Applied Sciences 14, no. 14: 6331. https://doi.org/10.3390/app14146331
APA StyleLi, H., Ruan, C., Su, Y., Jia, P., Wen, H., & Zhu, X. (2024). Transient Friction Analysis of Pressure Waves Propagating in Power-Law Non-Newtonian Fluids. Applied Sciences, 14(14), 6331. https://doi.org/10.3390/app14146331