
Compensation Observer-Based Adaptive Output Feedback Control for Multi-Agent Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
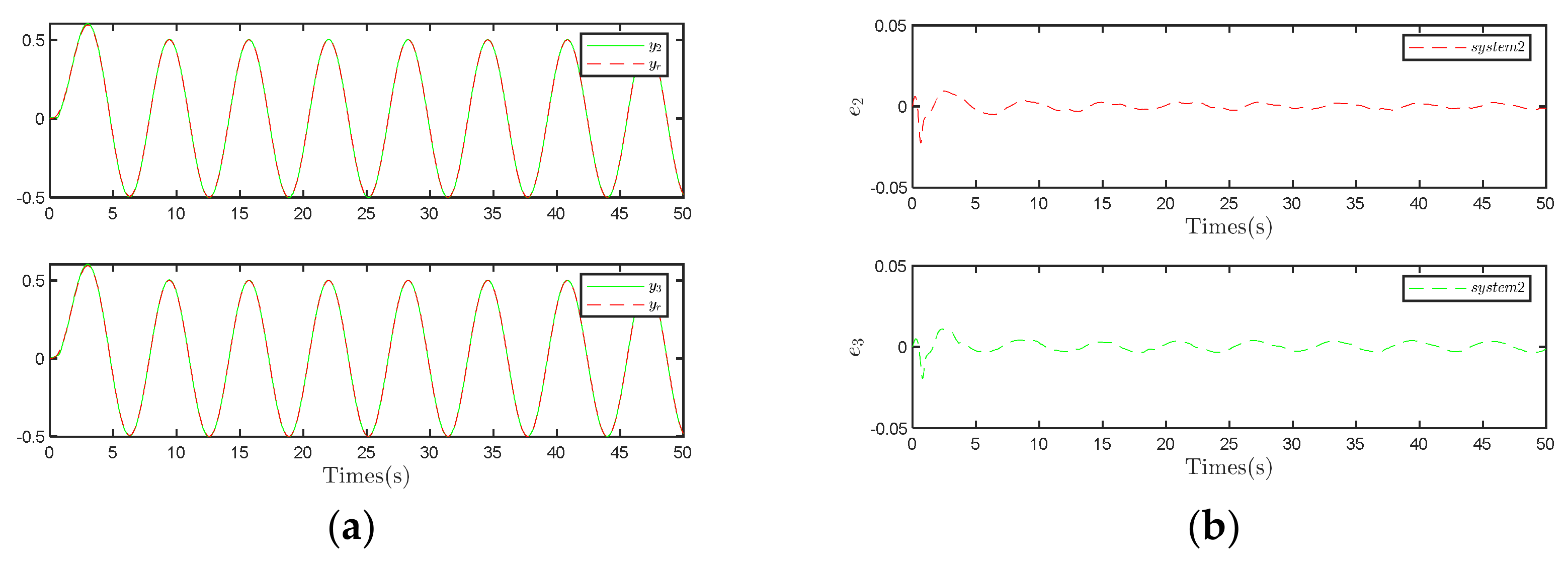
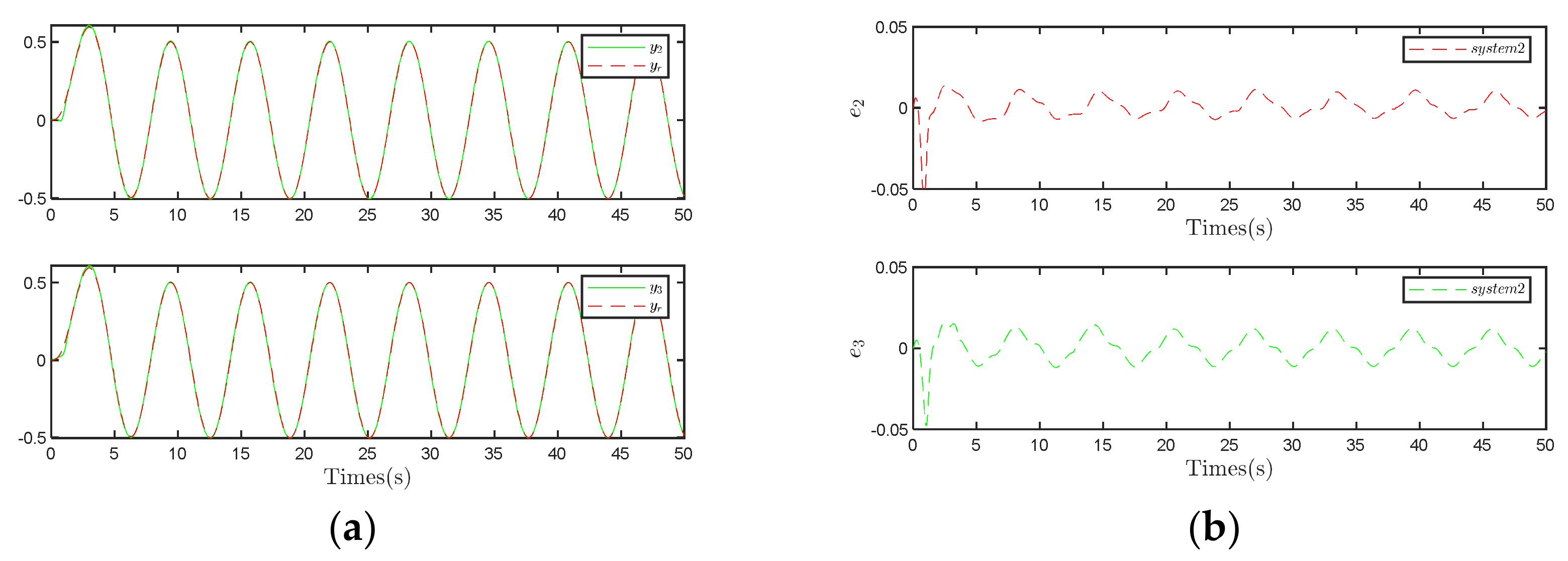
- This study introduces a modified compensating observer scheme. By incorporating this compensatory mechanism, the proposed method effectively reduces tracking errors and confines them to a small region near zero while ensuring stability, compared to traditional control schemes.
- (2)
- Unlike most output feedback systems, the system investigated in this study involves unknown parameters, nonlinear coupling, and hysteresis interference, and the proposed compensating observer has more practical significance.
2. Establishing the Problem Model
2.1. Preliminaries
2.2. Basic Model and Problem Hypothesis
3. Controller Design and Derivation
3.1. Design of the Gain Compensation Observer
3.2. Controller Design
4. Stability Analysis
5. Simulation Examples and a System Analysis of Control Strategies
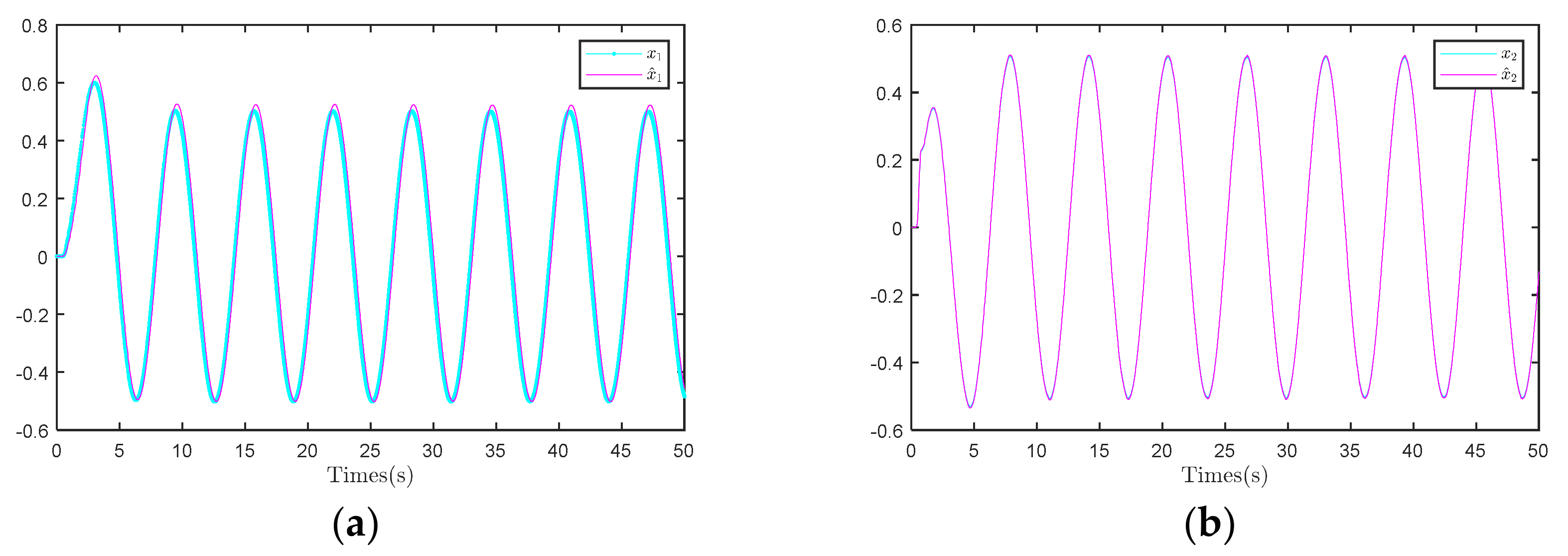
5.1. Numerical Example
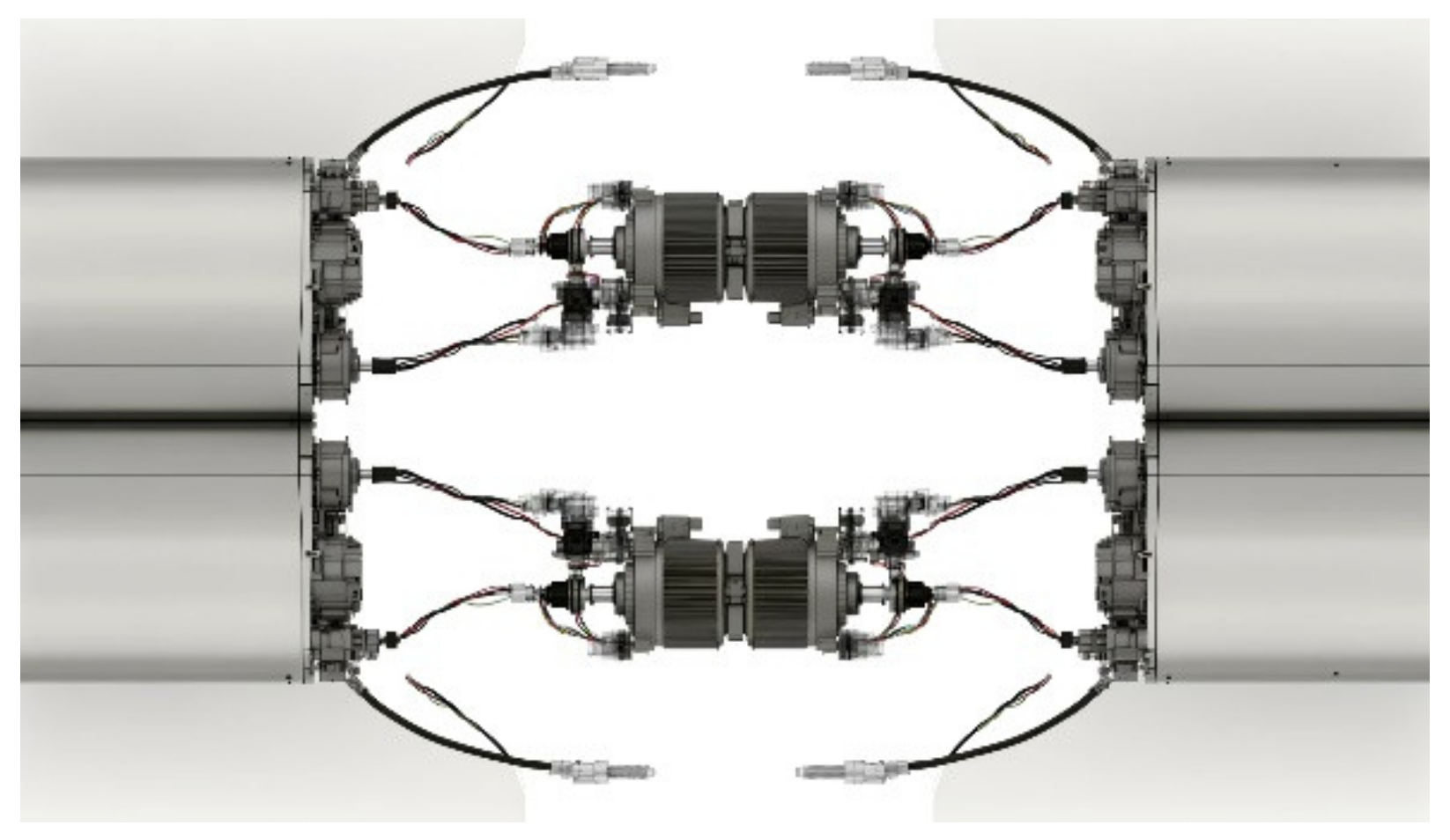
5.2. Pratical Example
6. Conclusions and Further Research
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Montagna, S.; Castro Silva, D.; Henriques Abreu, P.; Ito, M.; Schumacher, M.I.; Vargiu, E. Autonomous Agents and Multi-Agent Systems Applied in Healthcare. Artif. Intell. Med. 2019, 96, 142–144. [Google Scholar] [CrossRef] [PubMed]
- Cong, Z. Distributed ESO Based Cooperative Tracking Control for High-Order Nonlinear Multiagent Systems with Lumped Disturbance and Application in Multi Flight Simulators Systems. ISA Trans. 2018, 74, 217–228. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Chen, M.Z.Q.; Gao, Z.; Wu, C.W.; Lin, Z. Special Issue on “Distributed Coordination Control for Multi-Agent Systems in Engineering Applications”. ISA Trans. 2017, 71, 1–2. [Google Scholar] [CrossRef] [PubMed]
- De Wilde, P.; Briscoe, G. Stability of Evolving Multiagent Systems. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2011, 41, 1149–1157. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Fang, Z.; Li, Y. Global Decentralized Output Feedback Control for Interconnected Time Delay Systems with Saturated PI Hysteresis. J. Frankl. Inst. 2020, 357, 5460–5484. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, N.D.; Nahavandi, S. Deep Reinforcement Learning for Multiagent Systems: A Review of Challenges, Solutions, and Applications. IEEE Trans. Cybern. 2020, 50, 3826–3839. [Google Scholar] [CrossRef] [PubMed]
- Cui, G.; Xu, S.; Ma, Q.; Li, Y.; Zhang, Z. Prescribed Performance Distributed Consensus Control for Nonlinear Multi-Agent Systems with Unknown Dead-Zone Input. Int. J. Control 2017, 91, 1053–1065. [Google Scholar] [CrossRef]
- Gong, A.; Xie, X.; Yue, D.; Xia, J. Multi-instant observer design of discrete-time fuzzy systems via an enhanced gain-scheduling mechanism. IEEE Trans. Cybern. 2022, 53, 2876–2885. [Google Scholar] [CrossRef] [PubMed]
- Hua, C.; Liu, S.; Li, Y.; Guan, X. Distributed adaptive output feedback leader-following consensus control for nonlinear multiagent systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 4309–4317. [Google Scholar] [CrossRef]
- Huang, D.; Yang, C.; Pan, Y.; Cheng, L. Composite learning enhanced neural control for robot manipulator with output error constraints. IEEE Trans. Ind. Inform. 2019, 17, 209–218. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Z.; Ge, S.S. Dynamic Gain Reduced-Order Observer-Based Global Adaptive Neural-Network Tracking Control for Nonlinear Time-Delay Systems. IEEE Trans. Cybern. 2022, 53, 7105–7114. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Liu, J.; Huang, Z.; Peng, Y.; Pu, H.; Ding, L. Adaptive impedance control of human–robot cooperation using reinforcement learning. IEEE Trans. Ind. Electron. 2017, 64, 8013–8022. [Google Scholar] [CrossRef]
- Liu, G.; Zhao, L.; Yu, J. Adaptive finite-time consensus tracking for nonstrict feedback nonlinear multi-agent systems with unknown control directions. IEEE Access 2019, 7, 155262–155269. [Google Scholar] [CrossRef]
- Liu, Y.H. Adaptive dynamic surface asymptotic tracking for a class of uncertain nonlinear systems. Int. J. Robust Nonlinear Control 2018, 28, 1233–1245. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tong, S. Barrier Lyapunov functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints. Automatica 2016, 64, 70–75. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tong, S. Barrier Lyapunov functions for Nussbaum gain adaptive control of full state constrained nonlinear systems. Automatica 2017, 76, 143–152. [Google Scholar] [CrossRef]
- Liu, Y.; Lin, Y. Global adaptive output feedback tracking for a class of non-linear systems with unknown backlash-like hysteresis. IET Control Theory Appl. 2014, 8, 927–936. [Google Scholar] [CrossRef]
- Liu, Y.; Lin, Y.; Huang, R. Decentralised adaptive output feedback control for interconnected nonlinear systems preceded by unknown hysteresis. Int. J. Control 2015, 88, 1712–1725. [Google Scholar] [CrossRef]
- Schwartz, M.; Krebs, S.; Hohmann, S. Guaranteed State Estimation Using a Bundle of Interval Observers with Adaptive Gains Applied to the Induction Machine. Sensors 2021, 21, 2584. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Lu, J.; Li, Z.; Xu, S. Robust Adaptive Distributed Dynamic Surface Consensus Tracking Control for Nonlinear Multi-Agent Systems with Dynamic Uncertainties. J. Frankl. Inst. 2016, 353, 4785–4802. [Google Scholar] [CrossRef]
- Tao, G.; Kokotovic, P.V. Adaptive control of plants with unknown hystereses. IEEE Trans. Autom. Control. 1995, 40, 200–212. [Google Scholar] [CrossRef]
- Tong, S.; Li, Y.; Liu, Y. Observer-based adaptive neural networks control for large-scale interconnected systems with nonconstant control gains. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 1575–1585. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Shen, H.; Xie, X.; Hayat, T.; Alsaadi, F.E. Robust Adaptive Neural Control for Pure-Feedback Stochastic Nonlinear Systems with Prandtl–Ishlinskii Hysteresis. Neurocomputing 2018, 314, 169–176. [Google Scholar] [CrossRef]
- Ye, W.; Aghili, F.; Wu, J.; Su, C.-Y. Robust Adaptive Control of Uncertain Systems Preceded with Unknown Hysteresis Actuators. In Proceedings of the 2021 IEEE 7th International Conference on Control Science and Systems Engineering (ICCSSE), Qingdao, China, 30 July–1 August 2021; pp. 23–28. [Google Scholar]
- Zhao, W.; Liu, Y.; Liu, L. Observer-based adaptive fuzzy tracking control using integral barrier Lyapunov functionals for a nonlinear system with full state constraints. IEEE/CAA J. Autom. Sin. 2021, 8, 617–627. [Google Scholar] [CrossRef]
- Zhou, M.; Zhang, Y.; Ji, K.; Zhu, D. Model Reference Adaptive Control Based on KP Model for Magnetically Controlled Shape Memory Alloy Actuators. J. Appl. Biomater. Funct. Mater. 2017, 15, 31–37. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Liu, Y.; Zhang, G.; Li, H.; Liu, H. Novel Dynamic Surface Funnel Control for Input Delay Nonlinear Systems. Control. Theory Appl. 2022, 39, 1426–1432. [Google Scholar]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]
- Tao, G. Model reference adaptive control with L 1+ α tracking. Int. J. Control 1996, 64, 859–870. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Liu, Y. Compensation Observer-Based Adaptive Output Feedback Control for Multi-Agent Systems. Appl. Sci. 2024, 14, 5406. https://doi.org/10.3390/app14135406
Liu Z, Liu Y. Compensation Observer-Based Adaptive Output Feedback Control for Multi-Agent Systems. Applied Sciences. 2024; 14(13):5406. https://doi.org/10.3390/app14135406
Chicago/Turabian StyleLiu, Zhaoyuan, and Ye Liu. 2024. "Compensation Observer-Based Adaptive Output Feedback Control for Multi-Agent Systems" Applied Sciences 14, no. 13: 5406. https://doi.org/10.3390/app14135406
APA StyleLiu, Z., & Liu, Y. (2024). Compensation Observer-Based Adaptive Output Feedback Control for Multi-Agent Systems. Applied Sciences, 14(13), 5406. https://doi.org/10.3390/app14135406