

Fault-Tolerant Multiport Converter for Hybrid Distribution Systems: Configuration, Control Principles and Fault Analysis



Abstract
1. Introduction
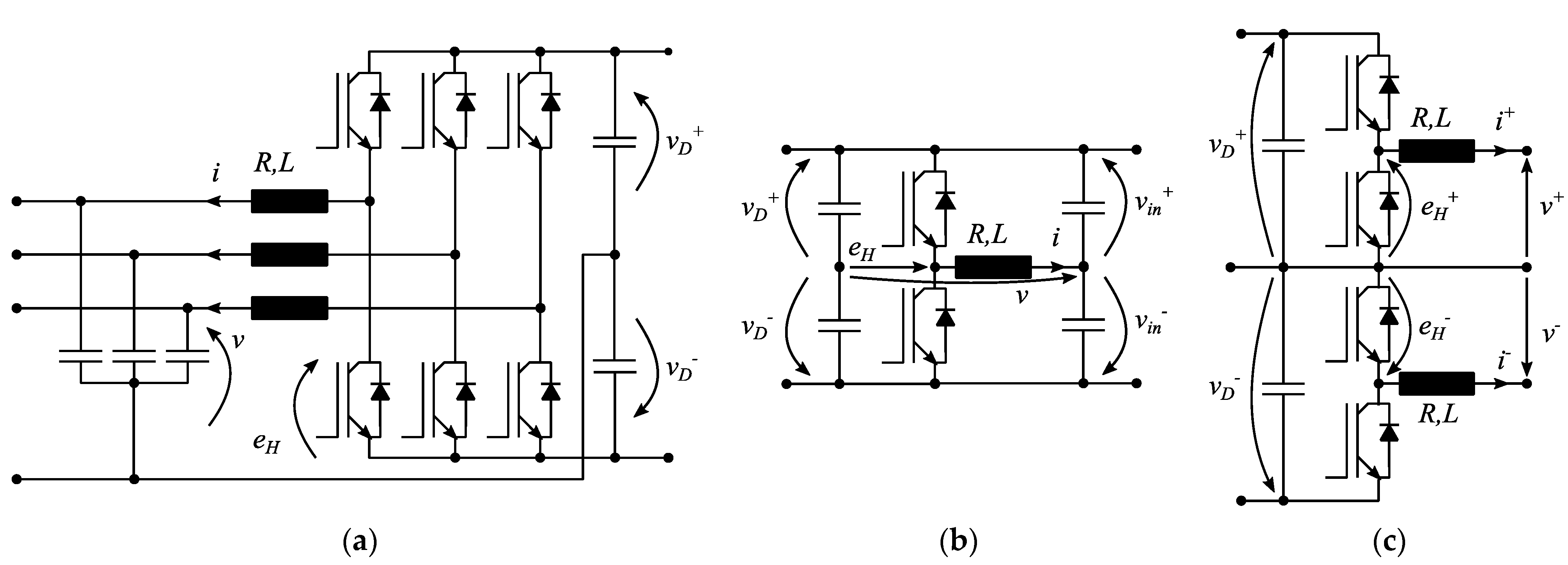
2. Innovative MC Configuration
- four-wire AC port module, represented in Figure 2a, including two semiconductors, each required to withstand the full DC link voltage;
- equilibrator module, represented in Figure 2b, including two semiconductors, each required to withstand the full DC link voltage;
- three-wire DC port module, represented in Figure 2c, including four semiconductors, each required to withstand one half of the DC link voltage.
3. Two-Level Control Design
3.1. Lower-Level Pseudo-Sliding Mode Control
3.2. Higher-Level Inverse Dynamic Control
4. Fault Analysis
4.1. External Fault Analysis
4.2. Internal Fault Analysis
5. Simulation Results
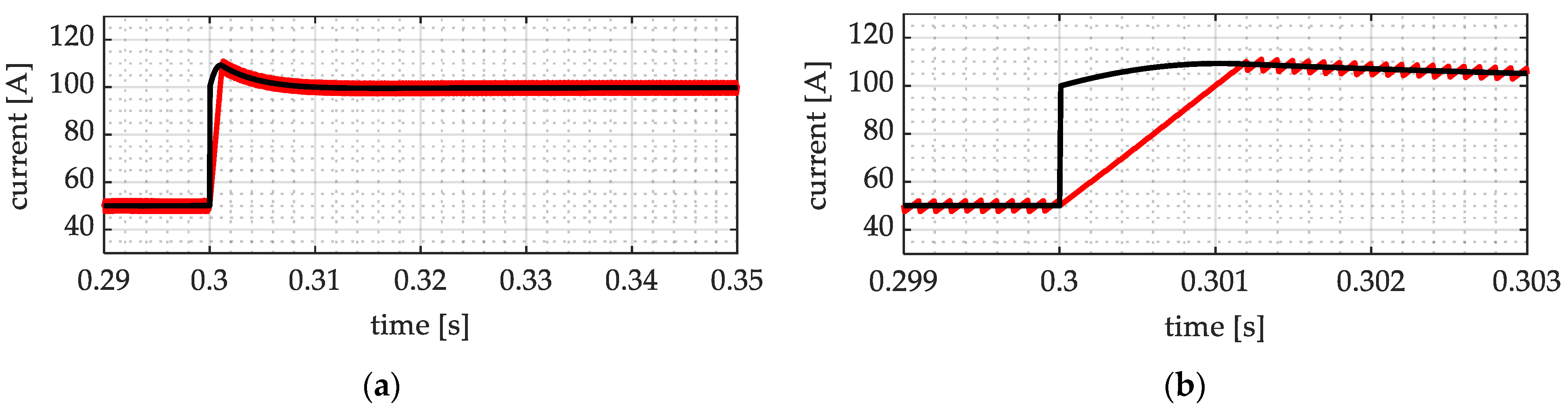
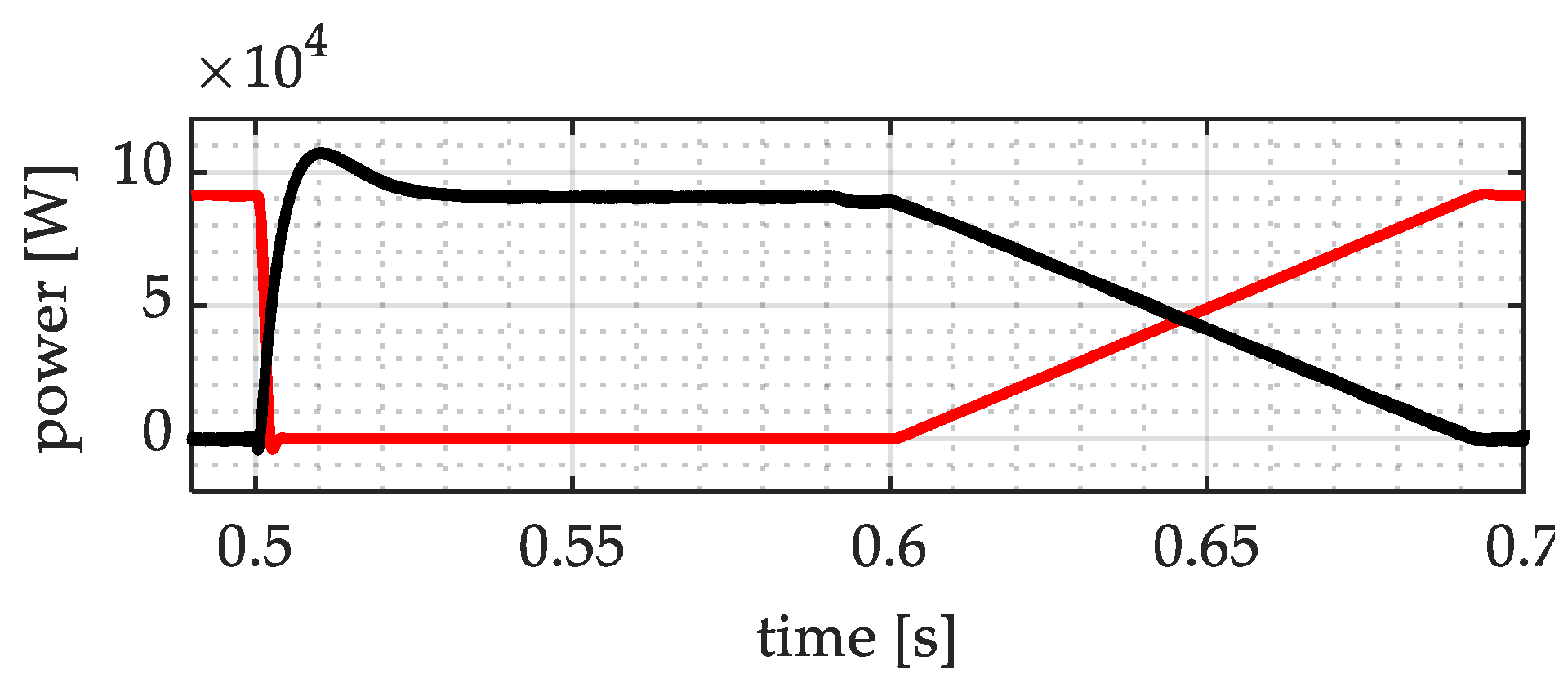
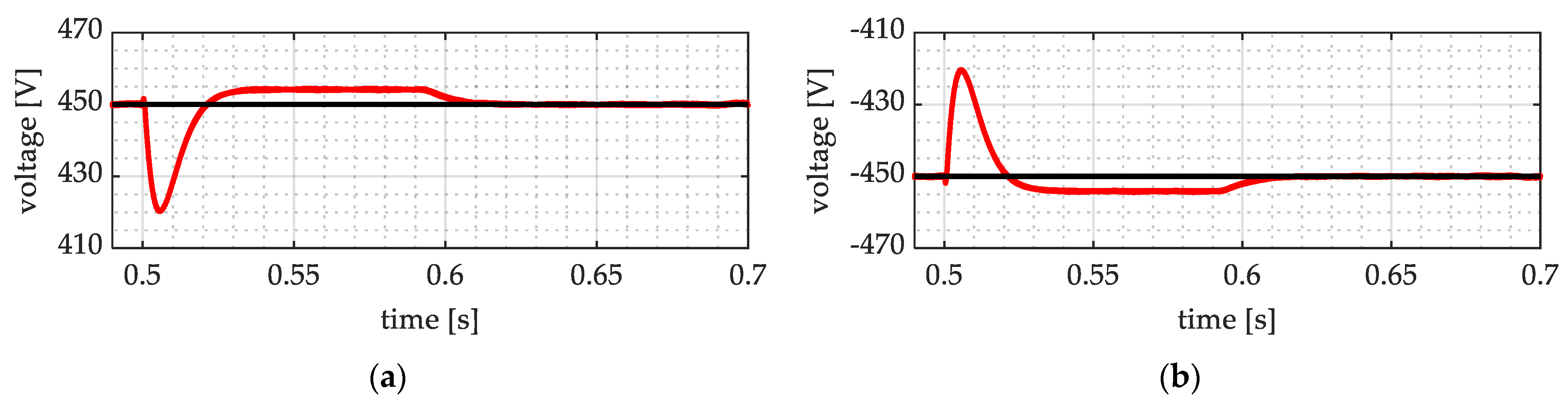
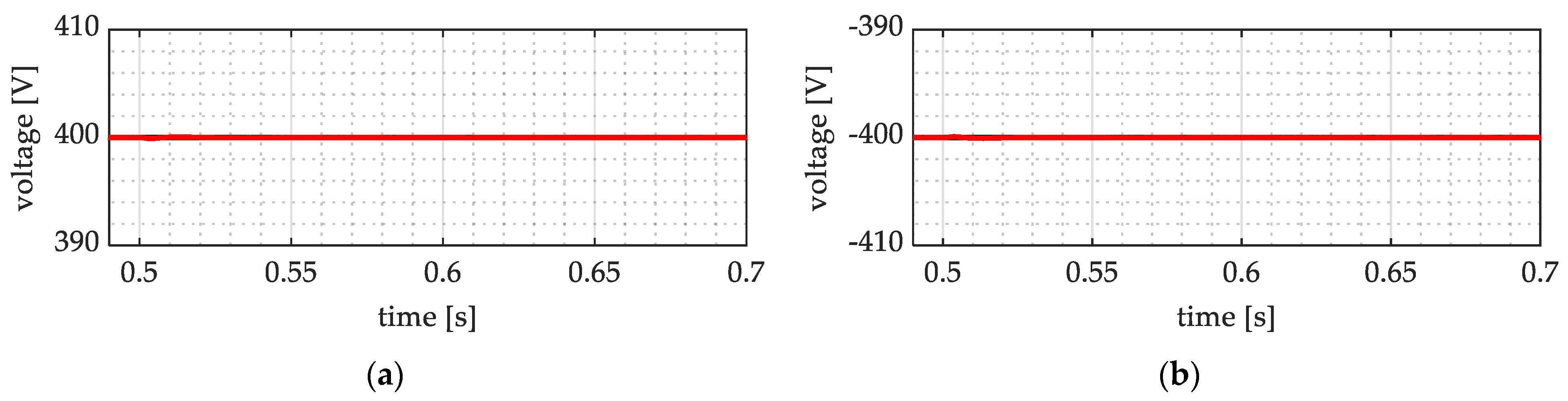
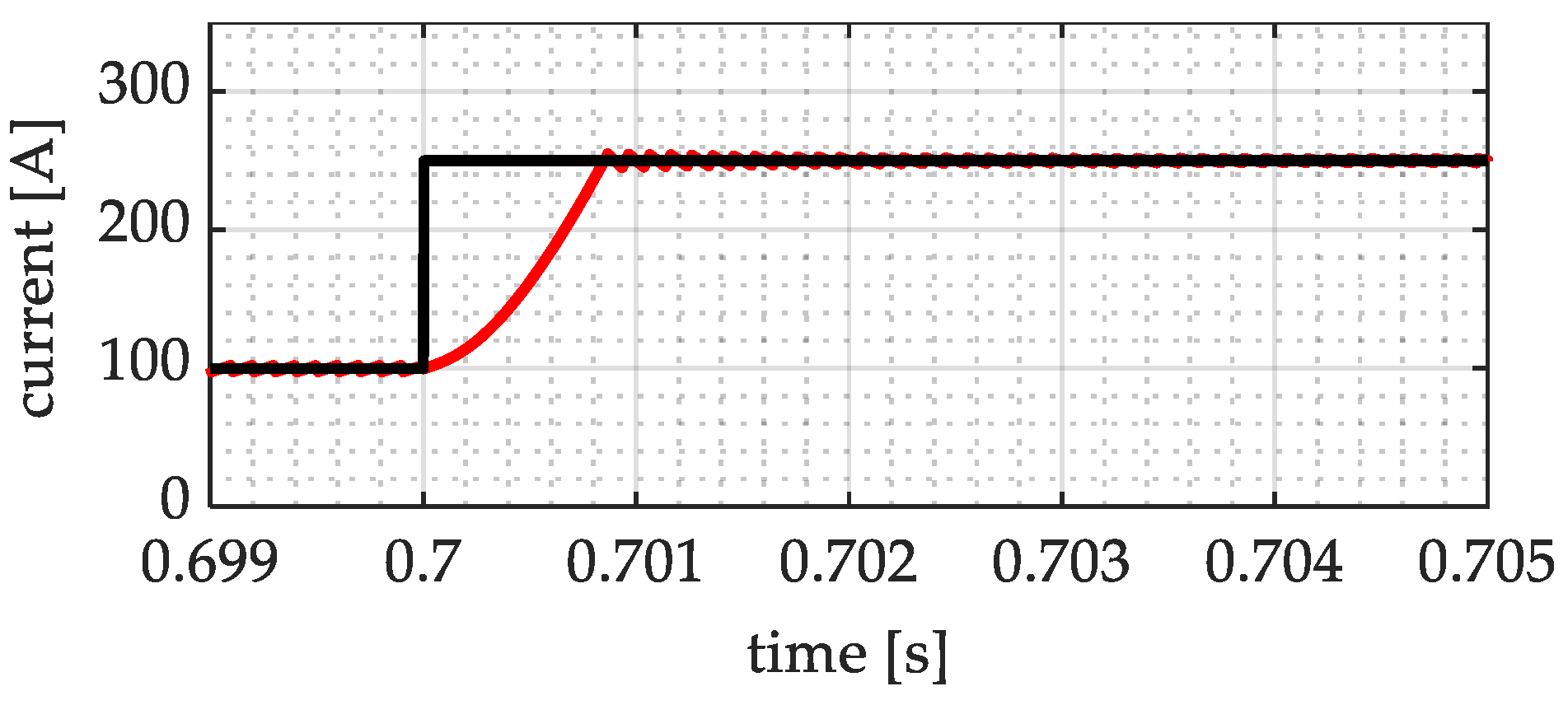
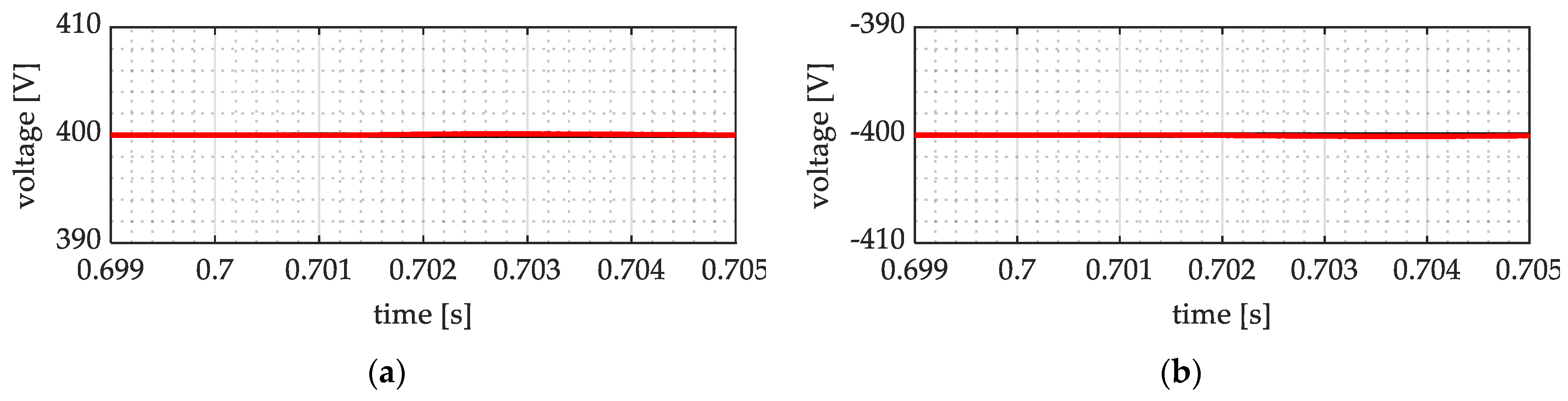
5.1. DC Load Asymmetrical Step-Change
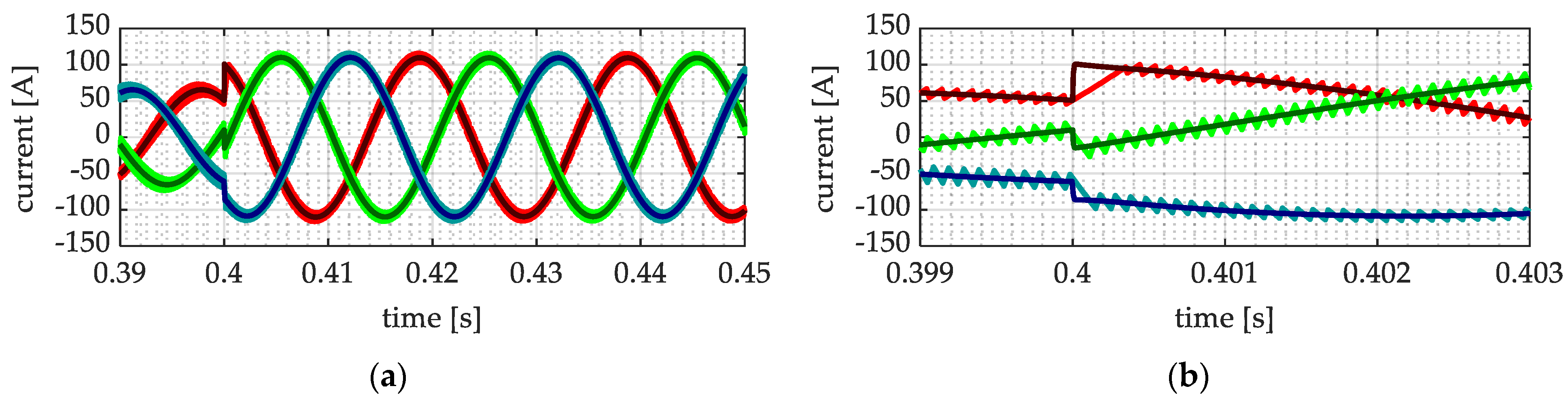
5.2. AC Load Step-Change
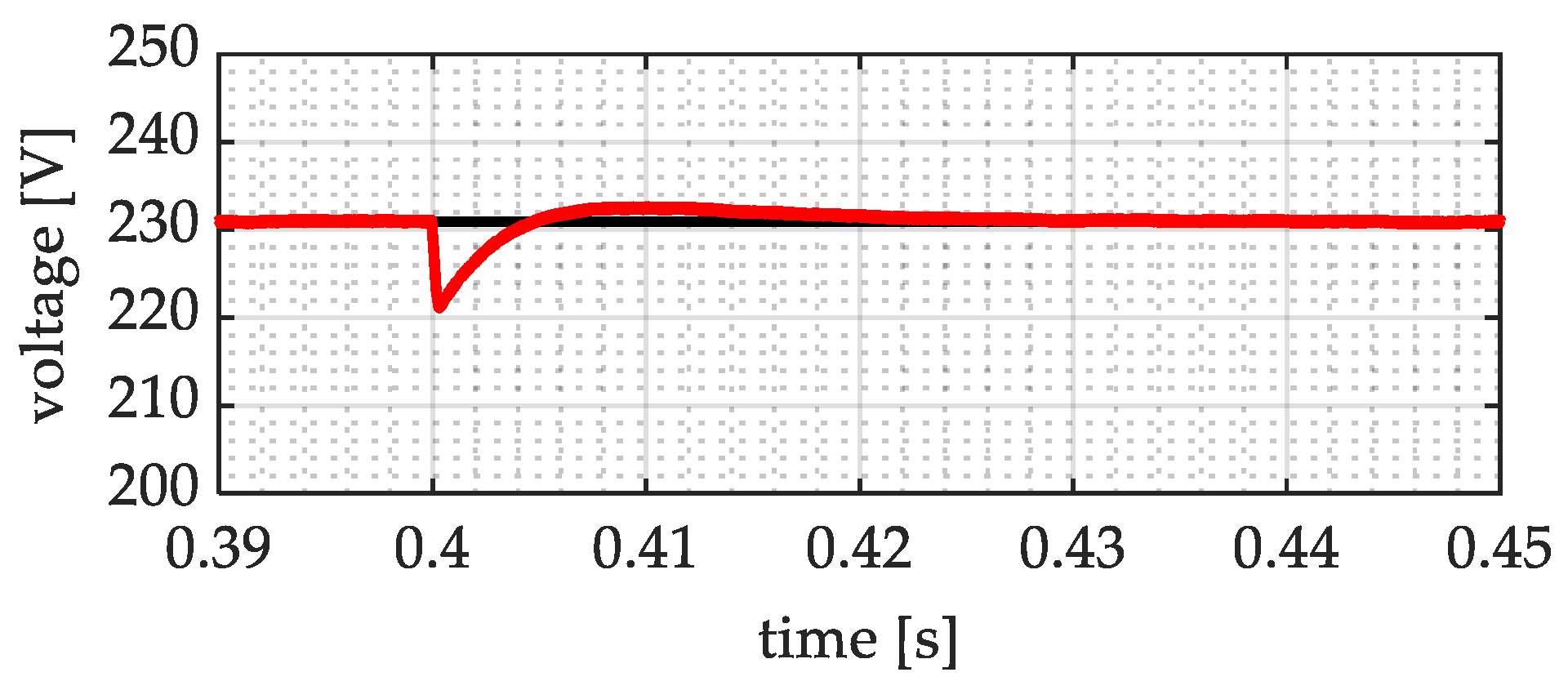
5.3. AC Mains Fault
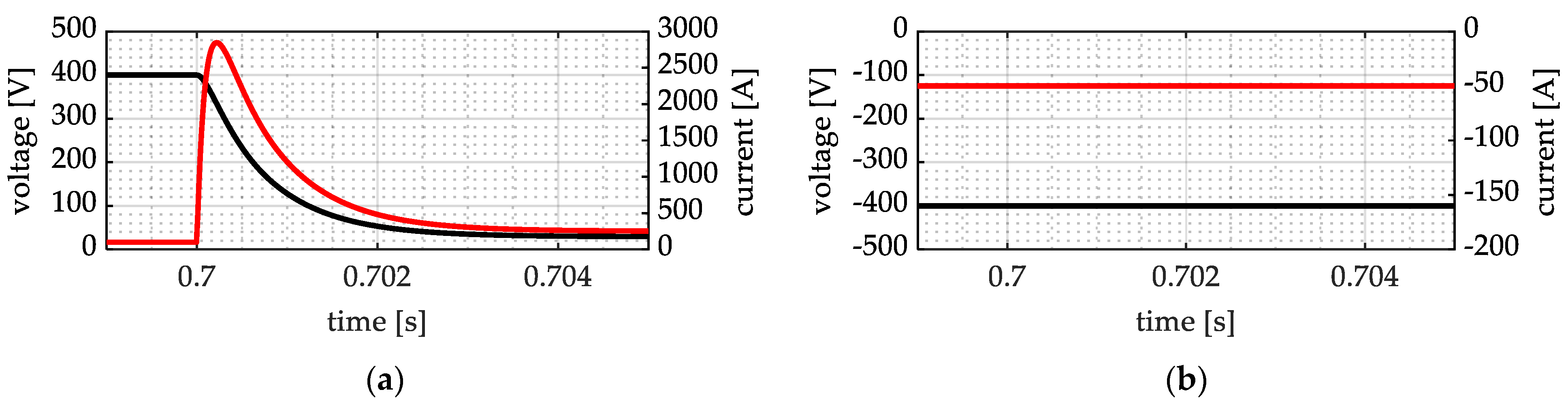
5.4. DC Port External Fault
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khosrogorji, S.; Ahmadian, M.; Torkaman, H. Multi-input DC/DC converters in connection with distributed generation units—A review. Renew. Sustain. Energy Rev. 2016, 66, 360–379. [Google Scholar] [CrossRef]
- Rehman, Z.; Al-Bahaly, I.; Mukhopadhyay, S. Multiinput DC–DC converters in renewable energy applications—An overview. Renew. Sustain. Energy Rev. 2015, 41, 521–539. [Google Scholar] [CrossRef]
- Zhang, N.; Sutanto, D.; Muttaqi, K.M. A review of topologies of three-port DC–DC converters for the integration of renewable energy and energy storage system. Renew. Sustain. Energy Rev. 2016, 56, 388–401. [Google Scholar] [CrossRef]
- Veena, P.; Indragandhi, V.; Jeyabharath, R.; Subramaniyaswamy, V. Review of grid integration schemes for renewable power generation system. Renew. Sustain. Energy Rev. 2014, 34, 628–641. [Google Scholar] [CrossRef]
- Jiang, W.; Fahimi, B. Multiport Power Electronic Interface—Concept, Modeling, and Design. IEEE Trans. Power Electron. 2011, 26, 1890–1900. [Google Scholar] [CrossRef]
- Shamsi, P.; Fahimi, B. Dynamic Behavior of Multiport Power Electronic Interface Under Source/Load Disturbances. IEEE Trans. Ind. Electron. 2013, 60, 4500–4511. [Google Scholar] [CrossRef]
- Corti, M.; Tironi, E.; Ubezio, G. Multi-port converters in smart grids: Protection selectivity. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Anacapri, Italy, 22–24 June 2016; pp. 143–149. [Google Scholar]
- Danyali, S.; Niapour, S.A.K.H.M.; Hosseini, S.H.; Gharehpetian, G.B.; Sabahi, M. New Single-Stage Single-Phase Three-Input DC-AC Boost Converter for Stand-Alone Hybrid PV/FC/UC Systems. Electr. Power Syst. Res. 2015, 127, 1–12. [Google Scholar] [CrossRef]
- Faraji, R.; Adib, E.; Farzanehfard, H. Soft-switched non-isolated high step-up multi-port DC-DC converter for hybrid energy system with minimum number of switches. Int. J. Electr. Power Energy Syst. 2019, 106, 511–519. [Google Scholar] [CrossRef]
- Negri, S.; Tironi, E.; Ubezio, G. Local DC Distribution System in Presence of RES and Storage Devices: Multiport Converters Application. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–8. [Google Scholar]
- Negri, S.; Tironi, E.; Superti-Furga, G.; Ubezio, G. Control and Fault Analysis of Multiport Converters for Low Voltage DC Distribution Systems. Int. J. Electr. Power Energy Syst. 2021, 124, 106335. [Google Scholar] [CrossRef]
- Zhao, C.; Round, S.D.; Kolar, J.W. An Isolated Three-Port Bidirectional DC-DC Converter with Decoupled Power Flow Management. IEEE Trans. Power Electron. 2008, 23, 2443–2453. [Google Scholar] [CrossRef]
- Schäfer, J.; Bortis, D.; Kolar, J.W. Multi-port multi-cell DC/DC converter topology for electric vehicle’s power distribution networks. In Proceedings of the 2017 IEEE 18th Workshop on Control and Modeling for Power Electronics (COMPEL), Stanford, CA, USA, 9–12 July 2017; pp. 1–9. [Google Scholar]
- Li, W.; Xiao, J.; Zhao, Y.; He, X. PWM Plus Phase Angle Shift (PPAS) Control Scheme for Combined Multiport DC/DC Converters. IEEE Trans. Power Electron. 2012, 27, 1479–1489. [Google Scholar] [CrossRef]
- Itoh, K.; Ishigaki, M.; Yanagizawa, N.; Tomura, S.; Umeno, T. Analysis and Design of a Multiport Converter Using a Magnetic Coupling Inductor Technique. IEEE Trans. Ind. Appl. 2015, 51, 1713–1721. [Google Scholar] [CrossRef]
- Wu, H.; Sun, K.; Zhu, L.; Xing, Y. An Interleaved Half-Bridge Three-Port Converter with Enhanced Power Transfer Capability Using Three-Leg Rectifier for Renewable Energy Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 606–616. [Google Scholar] [CrossRef]
- Kumar, L.; Jain, S. A multiple source DC/DC converter topology. Int. J. Electr. Power Energy Syst. 2013, 51, 278–291. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, D.; Athab, H.S.; Wu, B.; Gu, Y. PV Isolated Three-Port Converter and Energy-Balancing Control Method for PV-Battery Power Supply Applications. IEEE Trans. Ind. Electron. 2015, 62, 3595–3606. [Google Scholar] [CrossRef]
- Jakka, V.N.S.R.; Shukla, A.; Demetriades, G.D. Dual-Transformer-Based Asymmetrical Triple-Port Active Bridge (DT-ATAB) Isolated DC–DC Converter. IEEE Trans. Ind. Electron. 2017, 64, 4549–4560. [Google Scholar] [CrossRef]
- Qian, Z.; Abdel-Rahman, O.; Batarseh, I. An Integrated Four-Port DC/DC Converter for Renewable Energy Applications. IEEE Trans. Power Electron. 2010, 25, 1877–1887. [Google Scholar] [CrossRef]
- Wu, H.; Zhang, J.; Xing, Y. A Family of Multiport Buck–Boost Converters Based on DC-Link-Inductors (DLIs). IEEE Trans. Power Electron. 2015, 30, 735–746. [Google Scholar] [CrossRef]
- Tironi, E.; Corti, M.; Ubezio, G. A novel approach in multi-port DC/DC converter control. In Proceedings of the 2015 International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015; pp. 48–54. [Google Scholar]
- Corti, M.; Tironi, E.; Ubezio, G. DC Networks Including Multiport DC/DC Converters: Fault Analysis. IEEE Trans. Ind. Appl. 2016, 52, 3655–3662. [Google Scholar] [CrossRef]
- Wu, H.; Xu, P.; Hu, H.; Zhou, Z.; Xing, Y. Multiport Converters Based on Integration of Full-Bridge and Bidirectional DC–DC Topologies for Renewable Generation Systems. IEEE Trans. Ind. Electron. 2014, 61, 856–869. [Google Scholar] [CrossRef]
- Negri, S.; Tironi, E.; Ubezio, G. Zonal DC Distribution System based on Multiport Converters: Fault Analysis and Protection Design. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Negri, S.; Giani, F.; Blasuttigh, N.; Pavan, A.M.; Mellit, A.; Tironi, E. Combined model predictive control and ANN-based forecasters for jointly acting renewable self-consumers: An environmental and economical evaluation. Renew. Energy 2022, 198, 440–454. [Google Scholar] [CrossRef]
- Negri, S.; Tironi, E.; Danna, D.S. Integrated control strategy for islanded operation in smart grids: Virtual inertia and ancillary services. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–6. [Google Scholar]
- La Bella, A.; Negri, S.; Scattolini, R.; Tironi, E. A Two-Layer Control Architecture for Islanded AC Microgrids with Storage Devices. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; pp. 1421–1426. [Google Scholar]
- Ganjavi, A.; Ghoreishy, H.; Ahmad, A.A. A Novel Single-Input Dual-Output Three-Level DC–DC Converter. IEEE Trans. Ind. Electron. 2018, 65, 8101–8111. [Google Scholar] [CrossRef]
- Wang, Z.; Li, H. An Integrated Three-Port Bidirectional DC–DC Converter for PV Application on a DC Distribution System. IEEE Trans. Power Electron. 2013, 28, 4612–4624. [Google Scholar] [CrossRef]
- Alsolami, M.; Potty, K.A.; Wang, J. A Gallium-Nitride-Device-Based Switched Capacitor Multiport Multilevel Converter for UPS Applications. IEEE Trans. Power Electron. 2017, 32, 6853–6862. [Google Scholar] [CrossRef]
- Gummi, K.; Ferdowsi, M. Double-Input DC–DC Power Electronic Converters for Electric-Drive Vehicles—Topology Exploration and Synthesis Using a Single-Pole Triple-Throw Switch. IEEE Trans. Ind. Electron. 2010, 57, 617–623. [Google Scholar] [CrossRef]
- Vasiladiotis, M.; Rufer, A. A Modular Multiport Power Electronic Transformer with Integrated Split Battery Energy Storage for Versatile Ultrafast EV Charging Stations. IEEE Trans. Ind. Electron. 2015, 62, 3213–3222. [Google Scholar] [CrossRef]
- Yi, F.; Cai, W. Modeling, Control, and Seamless Transition of the Bidirectional Battery-Driven Switched Reluctance Motor/Generator Drive Based on Integrated Multiport Power Converter for Electric Vehicle Applications. IEEE Trans. Power Electron. 2016, 31, 7099–7111. [Google Scholar]
- Jovcic, D.; Lin, W. Multiport High-Power LCL DC Hub for Use in DC Transmission Grids. IEEE Trans. Power Deliv. 2014, 29, 760–768. [Google Scholar] [CrossRef]
- Xiang, W.; Lin, W.; Miao, L.; Wen, J. Power balancing control of a multi-terminal DC constructed by multiport front-to-front DC–DC converters. IET Gener. Transm. Distrib. 2017, 11, 363–371. [Google Scholar] [CrossRef]
- Dimitriou, A.; Charalambous, C.A. DC Interference Modeling for Assessing the Impact of Sustained DC Ground Faults of Photovoltaic Systems on Third-Party Infrastructure. IEEE Trans. Ind. Electron. 2019, 66, 2935–2945. [Google Scholar] [CrossRef]
- Nuutinen, P.; Pinomaa, A.; Peltoniemi, P.; Kaipia, T.; Karppanen, J.; Silventoinen, P. Common-Mode and RF EMI in a Low-Voltage DC Distribution Network with a PWM Grid-Tie Rectifying Converter. IEEE Trans. Smart Grid 2017, 8, 400–408. [Google Scholar] [CrossRef]
- Candeletti, F.; Tironi, E.; Carminati, M.; Ragaini, E. LVDC microgrid with double ac grid interface: Protection against dc ground faults and control strategies. In Proceedings of the 2018 18th International Conference on Harmonics and Quality of Power (ICHQP), Ljubljana, Slovenia, 13–16 May 2018; pp. 1–8. [Google Scholar]
- Negri, S.; Tironi, E.; Superti-Furga, G.; Carminati, M. VSC-based LVDC distribution network with DERs: Equivalent circuits for leakage and ground fault currents evaluation. Renew. Energy 2021, 177, 1133–1146. [Google Scholar] [CrossRef]
- Nuutinen, P.; Kaipia, T.; Karppanen, J.; Mattsson, A.; Lana, A.; Pinomaa, A.; Peltoniemi, P.; Partanen, J.; Luukkanen, M.; Hakala, T.; et al. LVDC rules—Technical specifications for public LVDC distribution network. CIRED-Open Access Proc. J. 2017, 2017, 293–296. [Google Scholar] [CrossRef]
- Mattsson, A.; Lana, A.; Nuutinen, P.; Vaisanen, V.; Peltoniemi, P.; Kaipia, T.; Silventoinen, P.; Partanen, J. Galvanic Isolation and Output LC Filter Design for the Low-Voltage DC Customer-End Inverter. IEEE Trans. Smart Grid 2014, 5, 2593–2601. [Google Scholar] [CrossRef]
- Yang, J.; Fletcher, J.E.; O’Reilly, J. Multiterminal DC Wind Farm Collection Grid Internal Fault Analysis and Protection Design. IEEE Trans. Power Deliv. 2010, 25, 2308–2318. [Google Scholar] [CrossRef]
- Xue, Y.; Xu, Z. On the Bipolar MMC-HVDC Topology Suitable for Bulk Power Overhead Line Transmission: Configuration, Control, and DC Fault Analysis. IEEE Trans. Power Deliv. 2014, 29, 2420–2429. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, B.; Ma, Y.; Zhou, F.; He, J. Analysis of Short-Circuit Current Characteristics and Its Distribution of Artificial Grounding Faults on DC Transmission Lines. IEEE Trans. Power Deliv. 2018, 33, 520–528. [Google Scholar] [CrossRef]
- Qi, L.; Antoniazzi, A.; Raciti, L. DC Distribution Fault Analysis, Protection Solutions, and Example Implementations. IEEE Trans. Ind. Appl. 2018, 54, 3179–3186. [Google Scholar] [CrossRef]
- Carminati, M.; Ragaini, E.; Tironi, E. DC and AC ground fault analysis in LVDC microgrids with energy storage systems. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 1047–1054. [Google Scholar]
- Guo, H.; Lam, S. Fault Analysis and Protection of a Series-DC Collection and Transmission System. IEEE Trans. Ind. Appl. 2018, 54, 5417–5428. [Google Scholar] [CrossRef]
- Hu, J.; Xu, K.; Lin, L.; Zeng, R. Analysis and Enhanced Control of Hybrid-MMC-Based HVDC Systems During Asymmetrical DC Voltage Faults. IEEE Trans. Power Deliv. 2017, 32, 1394–1403. [Google Scholar] [CrossRef]
- Yousefpoor, N.; Narwal, A.; Bhattacharya, S. Control of DC-Fault-Resilient Voltage Source Converter-Based HVDC Transmission System Under DC Fault Operating Condition. IEEE Trans. Ind. Electron. 2015, 62, 3683–3690. [Google Scholar] [CrossRef]
- Li, T.; Parsa, L. Design, Control, and Analysis of a Fault-Tolerant Soft-Switching DC–DC Converter for High-Power High-Voltage Applications. IEEE Trans. Power Electron. 2018, 33, 1094–1104. [Google Scholar] [CrossRef]
- Farzamkia, S.; Iman-Eini, H.; Noushak, M.; Hadizadeh, A. Improved Fault-Tolerant Method for Modular Multilevel Converters by Combined DC and Neutral-Shift Strategy. IEEE Trans. Ind. Electron. 2019, 66, 2454–2462. [Google Scholar] [CrossRef]
- Zhang, J.; Jovcic, D.; Lin, W. Steady-state DC fault analysis of multiport DC hub. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–10. [Google Scholar]
- Dong, Y.; Yang, H.; Li, W.; He, X. Neutral-Point-Shift-Based Active Thermal Control for a Modular Multilevel Converter Under a Single-Phase-to-Ground Fault. IEEE Trans. Ind. Electron. 2019, 66, 2474–2484. [Google Scholar] [CrossRef]
- He, J.; Li, B.; Li, Y. Analysis of the fault current limiting requirement and design of the bridge-type FCL in the multi-terminal DC grid. IET Power Electron. 2018, 11, 968–976. [Google Scholar] [CrossRef]
- Liu, J.; Tai, N.; Fan, C.; Chen, S. A Hybrid Current-Limiting Circuit for DC Line Fault in Multiterminal VSC-HVDC System. IEEE Trans. Ind. Electron. 2017, 64, 5595–5607. [Google Scholar] [CrossRef]
- Jin, J.X.; Chen, X.Y. Cooperative Operation of Superconducting Fault-Current-Limiting Cable and SMES System for Grounding Fault Protection in a LVDC Network. IEEE Trans. Ind. Appl. 2015, 51, 5410–5414. [Google Scholar] [CrossRef]
- Yang, Q.; Blond, S.L.; Liang, F.; Yuan, W.; Zhang, M.; Li, J. Design and Application of Superconducting Fault Current Limiter in a Multiterminal HVDC System. IEEE Trans. Appl. Supercond. 2017, 27, 1–5. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding mode control of DC/DC converters. J. Frankl. Inst. 2013, 350, 2146–2165. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Slotine, J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Jankowski, K.P. Inverse Dynamic Control in Robotic Applications; Trafford Publishing: Trafford, UK, 2004. [Google Scholar]
- Carmeli, M.S.; Superti-Furga, G. Augmented State Approach in Quasi-Sliding-Mode Controlled PEBB Based Power Converters. Int. J. Emerg. Electr. Power Syst. 2014, 15, 335–347. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Port | Connection | Details |
|---|---|---|
| 1 | Main AC Grid | 400 V, 50 Hz |
| 2 | Lithium batteries | 3.3 V, 60 Ah per module; 143 series connected modules |
| 3 | AC load | 400 V, 50 kW, cos φ = 1 |
| 4+ | PV panels | 75 kW, no-load voltage 450 V (assumed constant 50 kW in simulation) |
| 4− | PV panels | 75 kW, no-load voltage 450 V (assumed constant 50 kW in simulation) |
| 5+ | DC Load | 400 V, 40 kW, variable resistive load |
| 5− | DC Load | 400 V, 40 kW, variable resistive load |
| 6+ | DC Load | 400 V, 40 kW, variable resistive load |
| 6− | DC Load | 400 V, 20 kW, variable resistive load |
| Rated Values | Components | ||||
|---|---|---|---|---|---|
| Internal Voltage | ±450 V | Li | 1 mH | Leq | 2 mH |
| Switching Frequency | 10 kHz | Ri | 10 mΩ | Req | 20 mΩ |
| Maximum Port Current | 250 A | C1,3 | 400 μF | C4,5,6 | 6.8 mF |
| Control Time Constant | 5 ms | Cin | 1.1 mF | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Negri, S.; Ubezio, G.; Faranda, R.S. Fault-Tolerant Multiport Converter for Hybrid Distribution Systems: Configuration, Control Principles and Fault Analysis. Appl. Sci. 2024, 14, 4024. https://doi.org/10.3390/app14104024
Negri S, Ubezio G, Faranda RS. Fault-Tolerant Multiport Converter for Hybrid Distribution Systems: Configuration, Control Principles and Fault Analysis. Applied Sciences. 2024; 14(10):4024. https://doi.org/10.3390/app14104024
Chicago/Turabian StyleNegri, Simone, Giovanni Ubezio, and Roberto Sebastiano Faranda. 2024. "Fault-Tolerant Multiport Converter for Hybrid Distribution Systems: Configuration, Control Principles and Fault Analysis" Applied Sciences 14, no. 10: 4024. https://doi.org/10.3390/app14104024
APA StyleNegri, S., Ubezio, G., & Faranda, R. S. (2024). Fault-Tolerant Multiport Converter for Hybrid Distribution Systems: Configuration, Control Principles and Fault Analysis. Applied Sciences, 14(10), 4024. https://doi.org/10.3390/app14104024