
Trajectory Tracking Control of a Skid-Steer Mobile Robot Based on Nonlinear Model Predictive Control with a Hydraulic Motor Velocity Mapping

 ,
,
Abstract
:1. Introduction
- (1)
- The hierarchical control strategy allows for the decoupling of position control and hydraulic control tasks, thereby simplifying the overall controller design and enhancing the system’s robustness and performance. By separating the control objectives and utilizing different control algorithms at each level, the system effectively addresses the complex dynamics and nonlinearity of the hydraulic-driven skid-steer mobile robot.
- (2)
- We propose a hydraulic motor control method based on nonlinear current–velocity mapping. By establishing the mapping relationship between the input (control current) and output (motor velocity) of the hydraulic motor, the dynamics are obtained, thus avoiding the need for complex mechanism modeling and parameter identification processes. By adopting this data-driven approach, the requirement for detailed knowledge of system dynamics and precise parameter identification is reduced, making the controller easier to apply in practical robot systems.
- (3)
- Experimental tests on a heavy-duty hydraulic-driven skid-steer mobile robot were conducted for both velocity tracking control and trajectory tracking control, and the results validate the effectiveness of the proposed control strategy.
2. Problem Description and Modeling
2.1. Mobile Robot Kinematics
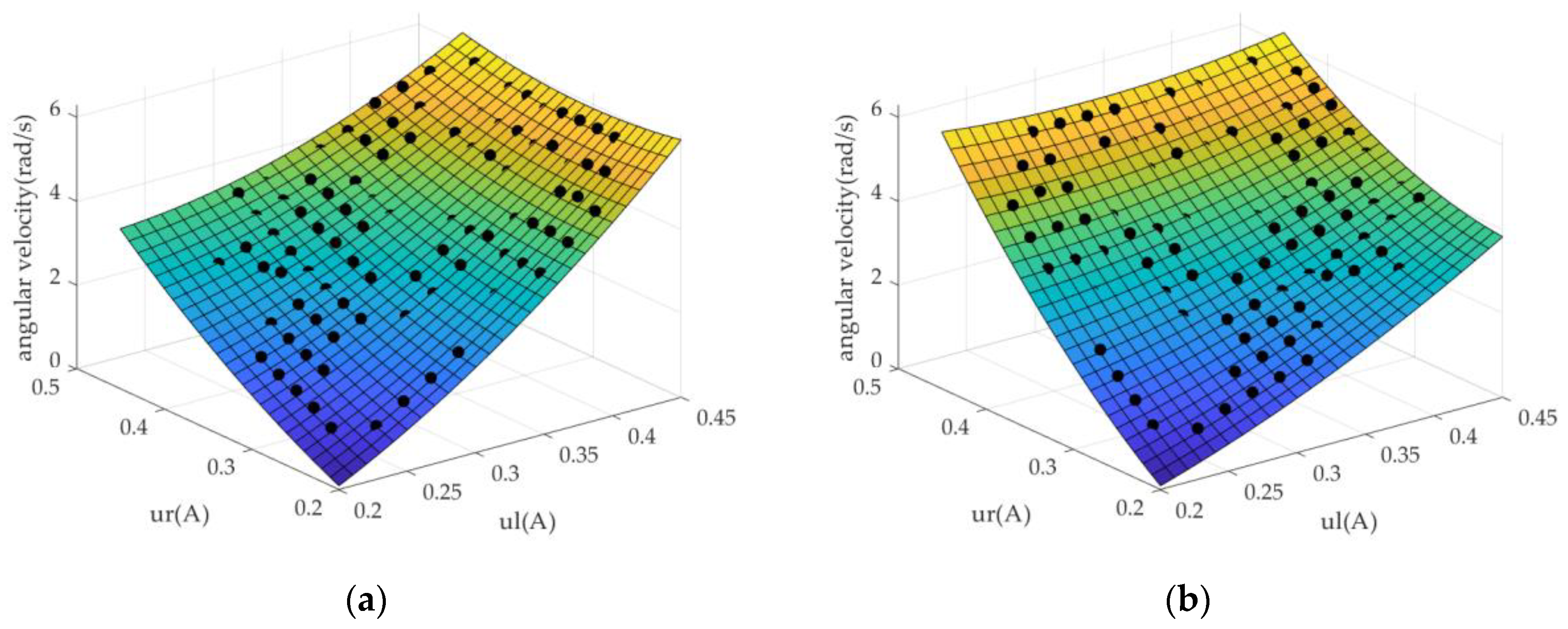
2.2. Nonlinear Velocity Mapping of Hydraulic Motor
| Algorithm 1: Current–Velocity Mapping Building |
| Input: (control current) |
| Output: current–velocity mapping of the left and right motor |
| Params: current range , sampling step |
| 1: for = do |
| 2: for = do |
| 3: |
| 4: send to hydraulic system |
| 5: collect motor velocity |
| 6: record and when the motor speed is stable |
| 7: end for |
| 8: end for |
| 9: , left motor velocity |
| 10: , right motor velocity |
3. Controller Design
3.1. Overall Framework
3.2. The Upper-Level Controller
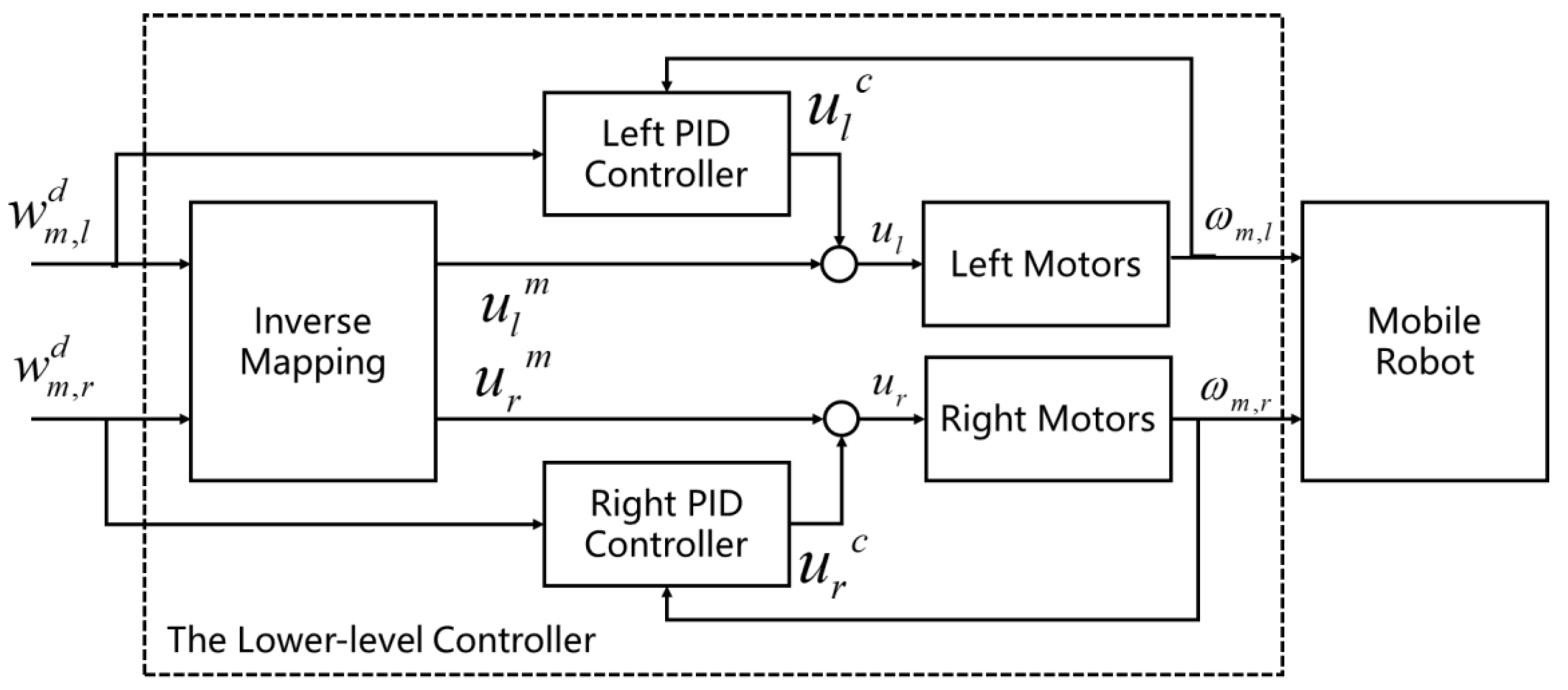
3.3. The Lower-Level Controller
4. Experiment
4.1. Experiment Platform
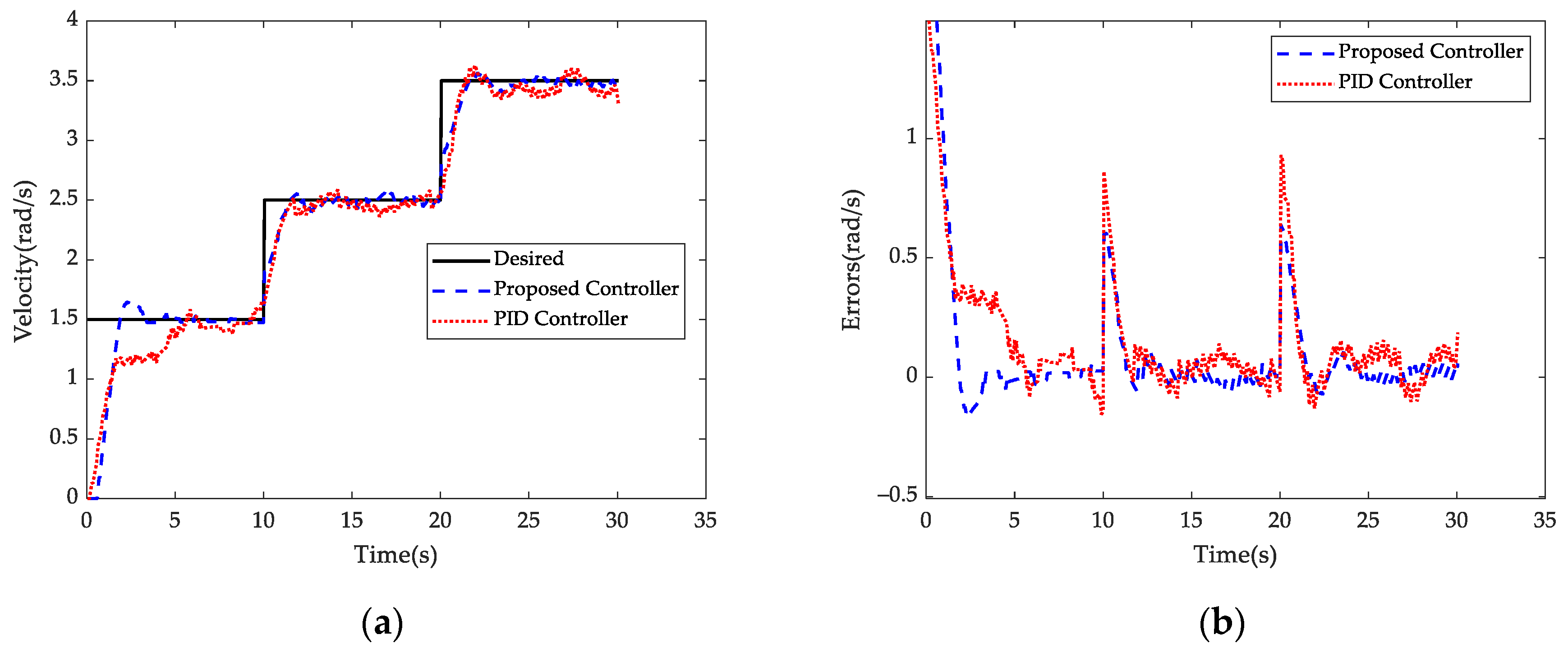
4.2. Verification of the Lower-Level Controller for Velocity Tracking
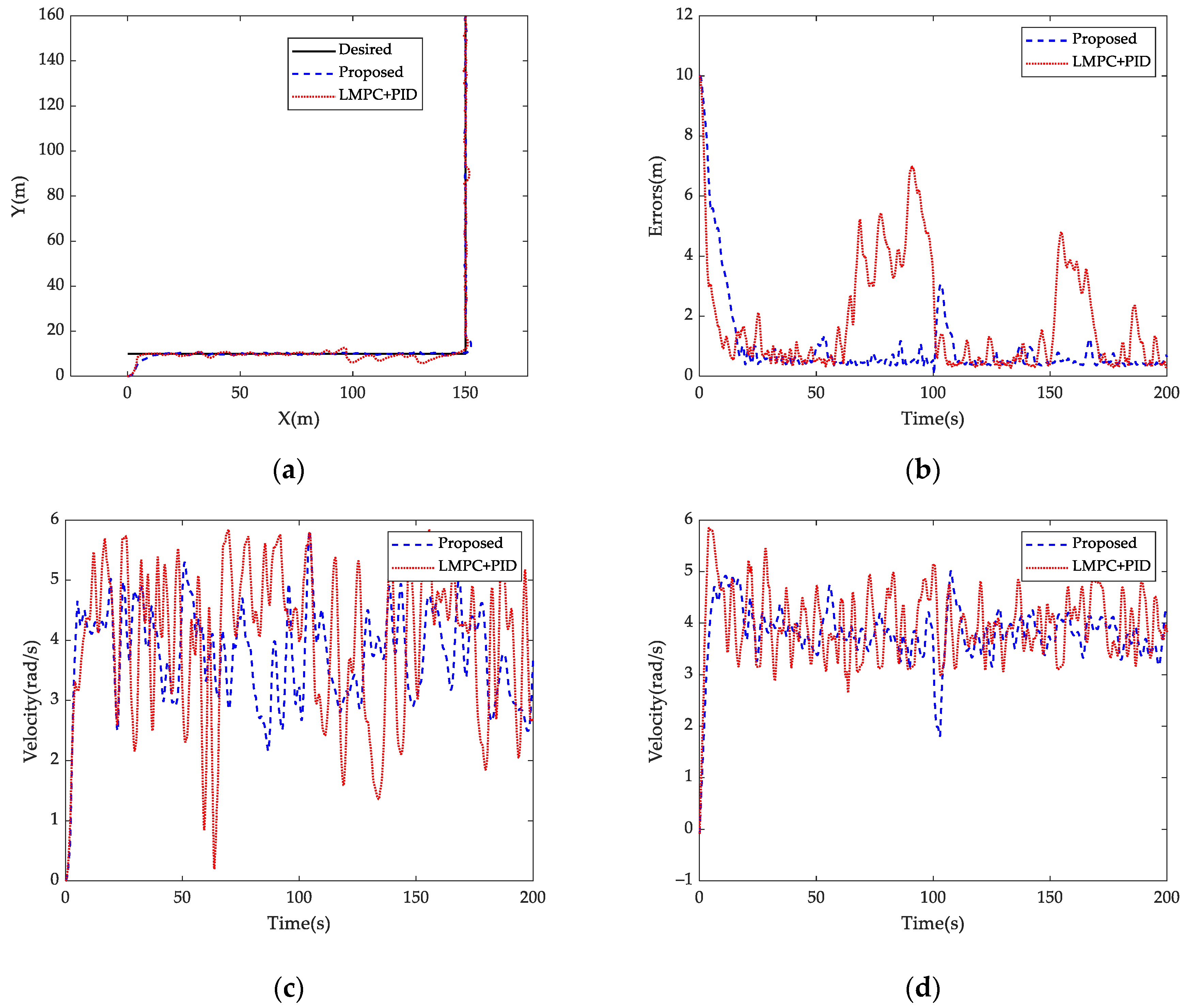
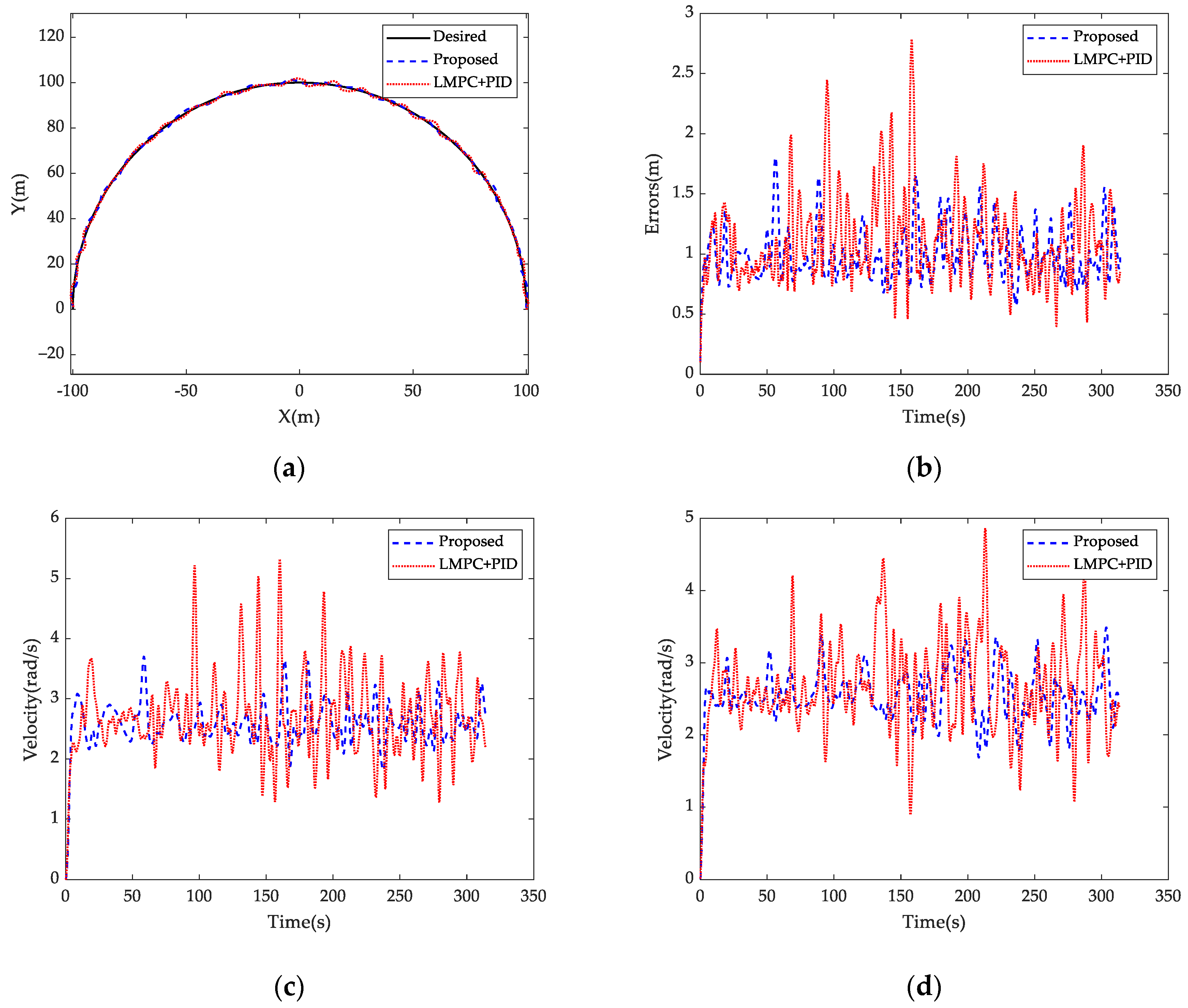
4.3. Verification of the Hierarchical Control Strategy for Trajectory Tracking
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile robotics in agricultural operations: A narrative review on planning aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Jiang, Y.; Meng, H.; Chen, G.; Yang, C.; Xu, X.; Zhang, L.; Xu, H. Differential-steering based path tracking control and energy-saving torque distribution strategy of 6WID unmanned ground vehicle. Energy 2022, 254, 124209. [Google Scholar] [CrossRef]
- Raj, R.; Kos, A. A comprehensive study of mobile robot: History, developments, applications, and future research perspectives. Appl. Sci. 2022, 12, 6951. [Google Scholar] [CrossRef]
- Wang, J.; Fader, M.T.H.; Marshall, J.A. Learning-based model predictive control for improved mobile robot path following using Gaussian processes and feedback linearization. J. Field Robot. 2023, 40, 1014–1033. [Google Scholar] [CrossRef]
- Zhou, X.; He, J.; He, Q.; Ren, C.; He, M. Motion kinematics analysis of a horse inspired terrain-adaptive unmanned vehicle with four hydraulic swing arms. IEEE Access 2020, 8, 194351–194362. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Z.; Qin, X.-q. Modeling and control for hydraulic transmission of unmanned ground vehicle. J. Cent. South Univ. 2014, 21, 124–129. [Google Scholar] [CrossRef]
- Łopatka, M.J.; Cieślik, K.; Krogul, P.; Muszyński, T.; Przybysz, M.; Rubiec, A.; Spadło, K. Research on Terrain Mobility of UGV with Hydrostatic Wheel Drive and Slip Control Systems. Energies 2023, 16, 6938. [Google Scholar] [CrossRef]
- Yu, W.; Chuy, O.Y.; Collins, E.G.; Hollis, P. Analysis and experimental verification for dynamic modeling of a skid-steered wheeled vehicle. IEEE Trans. Robot. 2010, 26, 340–353. [Google Scholar] [CrossRef]
- Nakkarat, P.; Kuntanapreeda, S. Observer-based backstepping force control of an electrohydraulic actuator. Control Eng. Pract. 2009, 17, 895–902. [Google Scholar] [CrossRef]
- Tiep, D.K.; Lee, K.; Im, D.Y.; Kwak, B.; Ryoo, Y.J. Design of Fuzzy-PID Controller for Path Tracking of Mobile Robot with Differential Drive. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 220–228. [Google Scholar] [CrossRef]
- Xin, G.Y.; Xin, S.Y.; Cebe, O.; Pollayil, M.J.; Angelini, F.; Garabini, M.; Vijayakumar, S.; Mistry, M. Robust Footstep Planning and LQR Control for Dynamic Quadrupedal Locomotion. IEEE Robot. Autom. Lett. 2021, 6, 4488–4495. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, X.; Meng, W.; Zheng, S.; Jiang, L.; Meng, J.; Wang, S. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot. ISA Trans. 2021, 108, 282–294. [Google Scholar] [CrossRef] [PubMed]
- Ryu, J.C.; Agrawal, S.K. Differential flatness-based robust control of mobile robots in the presence of slip. Int. J. Robot. Res. 2011, 30, 463–475. [Google Scholar] [CrossRef]
- Liao, J.; Chen, Z.; Yao, B. Performance-oriented coordinated adaptive robust control for four-wheel independently driven skid steer mobile robot. IEEE Access 2017, 5, 19048–19057. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, X.; Tao, B.; Ding, H. Point stabilization of nonholonomic mobile robot by Bézier smooth subline constraint nonlinear model predictive control. IEEE-ASME Trans. Mechatron. 2020, 26, 990–1001. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, H.; Hao, P.; Deng, H. Observer-Based Approximate Affine Nonlinear Model Predictive Controller for Hydraulic Robotic Excavators with Constraints. Processes 2023, 11, 1918. [Google Scholar] [CrossRef]
- Worthmann, K.; Mehrez, M.W.; Zanon, M.; Mann, G.K.I.; Gosine, R.G.; Diehl, M. Model predictive control of nonholonomic mobile robots without stabilizing constraints and costs. IEEE Trans. Control Syst. Technol. 2015, 24, 1394–1406. [Google Scholar] [CrossRef]
- Li, Z.; Deng, J.; Lu, R.; Xu, Y.; Bai, J.; Su, C.-Y. Trajectory-tracking control of mobile robot systems incorporating neural-dynamic optimized model predictive approach. IEEE Trans. Syst. Man Cybern.-Syst. 2015, 46, 740–749. [Google Scholar] [CrossRef]
- Mehrez, M.W.; Mann, G.K.I.; Gosine, R.G. Stabilizing NMPC of wheeled mobile robots using open-source real-time software. In Proceedings of the 2013 16th International Conference on Advanced Robotics, Montevideo, Uruguay, 25–29 November 2013; pp. 1–6. [Google Scholar]
- Kayacan, E.; Saeys, W.; Ramon, H.; Belta, C.; Peschel, J.M. Experimental validation of linear and nonlinear MPC on an articulated unmanned ground vehicle. IEEE-ASME Trans. Mechatron. 2018, 23, 2023–2030. [Google Scholar] [CrossRef]
- Prado, Á.J.; Torres-Torriti, M.; Yuz, J.; Cheein, F.A. Tube-based nonlinear model predictive control for autonomous skid-steer mobile robots with tire–terrain interactions. Control Eng. Pract. 2020, 101, 104451. [Google Scholar] [CrossRef]
- Ostafew, C.J.; Schoellig, A.P.; Barfoot, T.D. Learning-based nonlinear model predictive control to improve vision-based mobile robot path-tracking in challenging outdoor environments. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 4029–4036. [Google Scholar]
- Jayasiri, A.; Gros, S.; Mann, G.K.I. Tracking control and state estimation of a mobile robot based on NMPC and MHE. In Proceedings of the 2016 American Control Conference, Boston, MA, USA, 6–8 July 2016; pp. 1999–2004. [Google Scholar]
- Ostafew, C.J.; Schoellig, A.P.; Barfoot, T.D. Robust constrained learning-based NMPC enabling reliable mobile robot path tracking. Int. J. Robot. Res. 2016, 35, 1547–1563. [Google Scholar] [CrossRef]
- Zeng, X.; Li, L.; Song, D.; Li, L.; Li, G. Model predictive control based on time-varying efficiency for hydraulic hub-motor driving vehicle. Proc. Inst. Mech. Eng. Part D-J. Automob. Eng. 2021, 235, 2949–2963. [Google Scholar] [CrossRef]
- Park, J.; Cho, D.; Kim, S.; Kim, Y.B.; Kim, P.Y.; Kim, H.J. Utilizing online learning based on echo-state networks for the control of a hydraulic excavator. Mechatronics 2014, 24, 986–1000. [Google Scholar] [CrossRef]
- Yao, B.; Bu, F.; Reedy, J.; Chiu, G.-C. Adaptive robust motion control of single-rod hydraulic actuators: Theory and experiments. IEEE-ASME Trans. Mechatron. 2000, 5, 79–91. [Google Scholar]
- Liao, J.; Chen, Z.; Yao, B. Model-based coordinated control of four-wheel independently driven skid steer mobile robot with wheel–ground interaction and wheel dynamics. IEEE Trans. Ind. Inform. 2018, 15, 1742–1752. [Google Scholar] [CrossRef]
- Helian, B.; Chen, Z.; Yao, B. Precision motion control of a servomotor-pump direct-drive electrohydraulic system with a nonlinear pump flow mapping. IEEE Trans. Ind. Electron. 2019, 67, 8638–8648. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controllers | Settings |
|---|---|
| Proposed Controller | Mappings: Equation (7), , , |
| PID Controller | , , |
| Parameters | Proposed Controller | LMPC + PID |
|---|---|---|
| Upper-level | NMPC | LMPC |
| Sample time | 0.1 | 0.1 |
| Prediction horizon | 10 | 10 |
| Control horizon | 10 | 10 |
| Weight Q | ||
| Weight W | ||
| Linear velocity constraints (m/s) | [−1.8, 1.8] | [−1.8, 1.8] |
| Angular velocity constraints (rad/s) | ||
| Lower-level | Mapping + PID | PID |
| Mappings | Equation (7) | / |
| Proportional coefficient | 4 | 10 |
| Integral coefficient | 0.4 | 0.5 |
| Derivative coefficient | 0.5 | 1 |
| Dead zone of valve (A) | [−0.2, 0.2] | [−0.2, 0.2] |
| Position Errors (m) | L-Shaped Trajectory | Circle-Shaped Trajectory | |
|---|---|---|---|
| Proposed Controller | Max | 3.07 | 1.80 |
| RMSE | 0.72 | 1.02 | |
| LMPC + PID | Max | 6.99 | 2.78 |
| RMSE | 2.49 | 1.26 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Liu, Z.; Chen, H.; Zhang, Y.; Zhang, D.; Peng, C. Trajectory Tracking Control of a Skid-Steer Mobile Robot Based on Nonlinear Model Predictive Control with a Hydraulic Motor Velocity Mapping. Appl. Sci. 2024, 14, 122. https://doi.org/10.3390/app14010122
Wang J, Liu Z, Chen H, Zhang Y, Zhang D, Peng C. Trajectory Tracking Control of a Skid-Steer Mobile Robot Based on Nonlinear Model Predictive Control with a Hydraulic Motor Velocity Mapping. Applied Sciences. 2024; 14(1):122. https://doi.org/10.3390/app14010122
Chicago/Turabian StyleWang, Jian, Zhen Liu, Hongqiang Chen, Yi Zhang, Daqing Zhang, and Changfeng Peng. 2024. "Trajectory Tracking Control of a Skid-Steer Mobile Robot Based on Nonlinear Model Predictive Control with a Hydraulic Motor Velocity Mapping" Applied Sciences 14, no. 1: 122. https://doi.org/10.3390/app14010122
APA StyleWang, J., Liu, Z., Chen, H., Zhang, Y., Zhang, D., & Peng, C. (2024). Trajectory Tracking Control of a Skid-Steer Mobile Robot Based on Nonlinear Model Predictive Control with a Hydraulic Motor Velocity Mapping. Applied Sciences, 14(1), 122. https://doi.org/10.3390/app14010122