
Development of an IoT-Based Precision Irrigation System for Tomato Production from Indoor Seedling Germination to Outdoor Field Production


Abstract
:1. Introduction
2. Materials and Methods
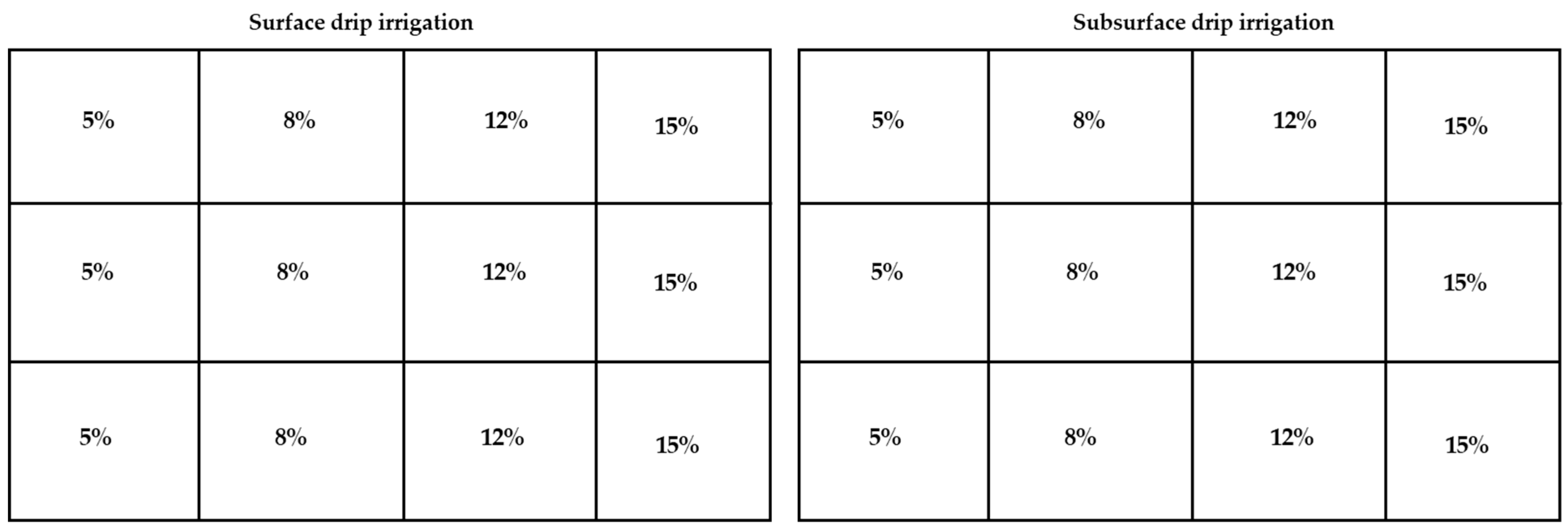
2.1. Indoor Experiments for Seedling Germination
2.2. Sensor Calibration
2.3. Sensor and Irrigation System Installation
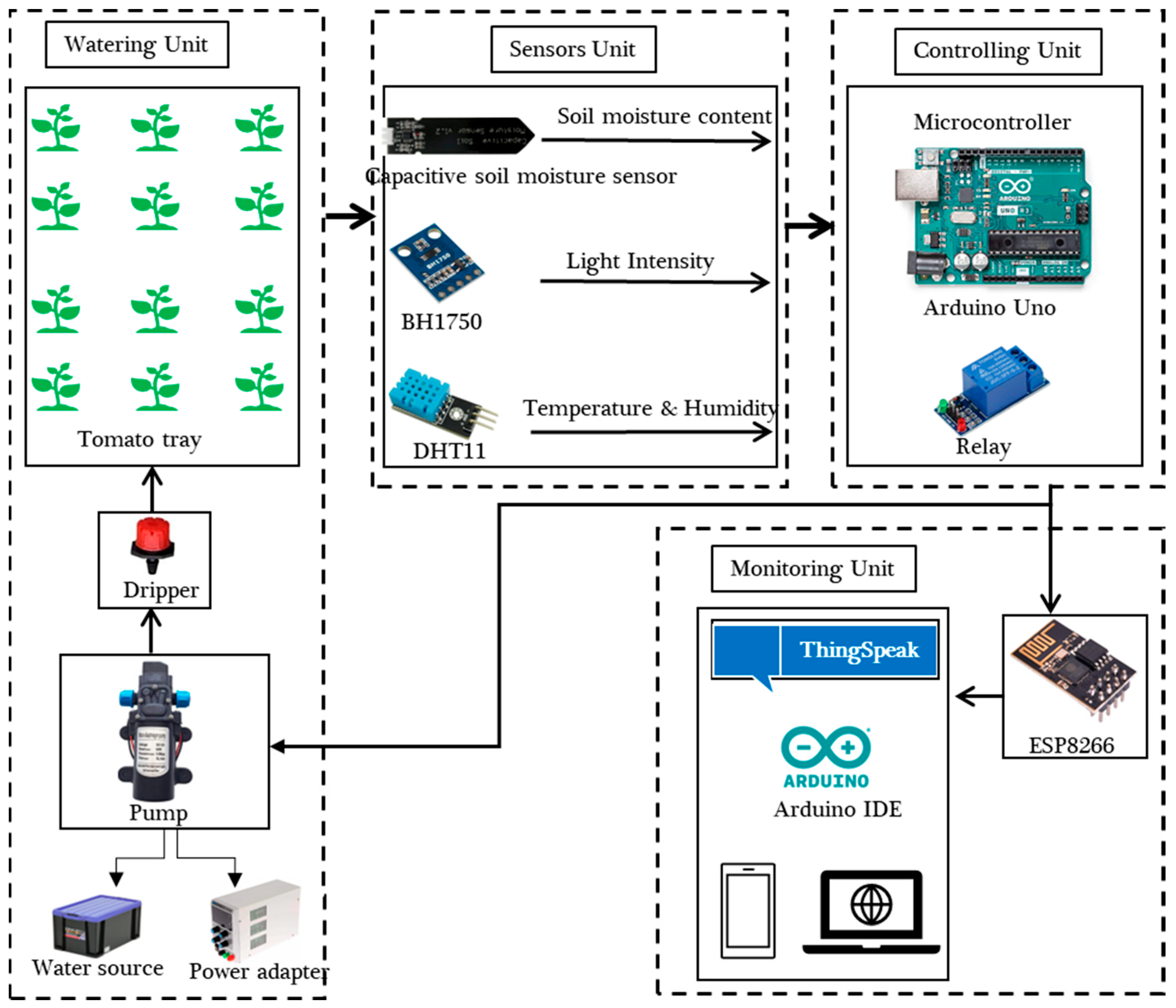
2.4. IoT-Based Precision Irrigation Control System
2.5. Data Analysis
2.6. Data Storage and Data Sharing
2.7. Outdoor Field Experiments for Transplanting Germinated Seedlings
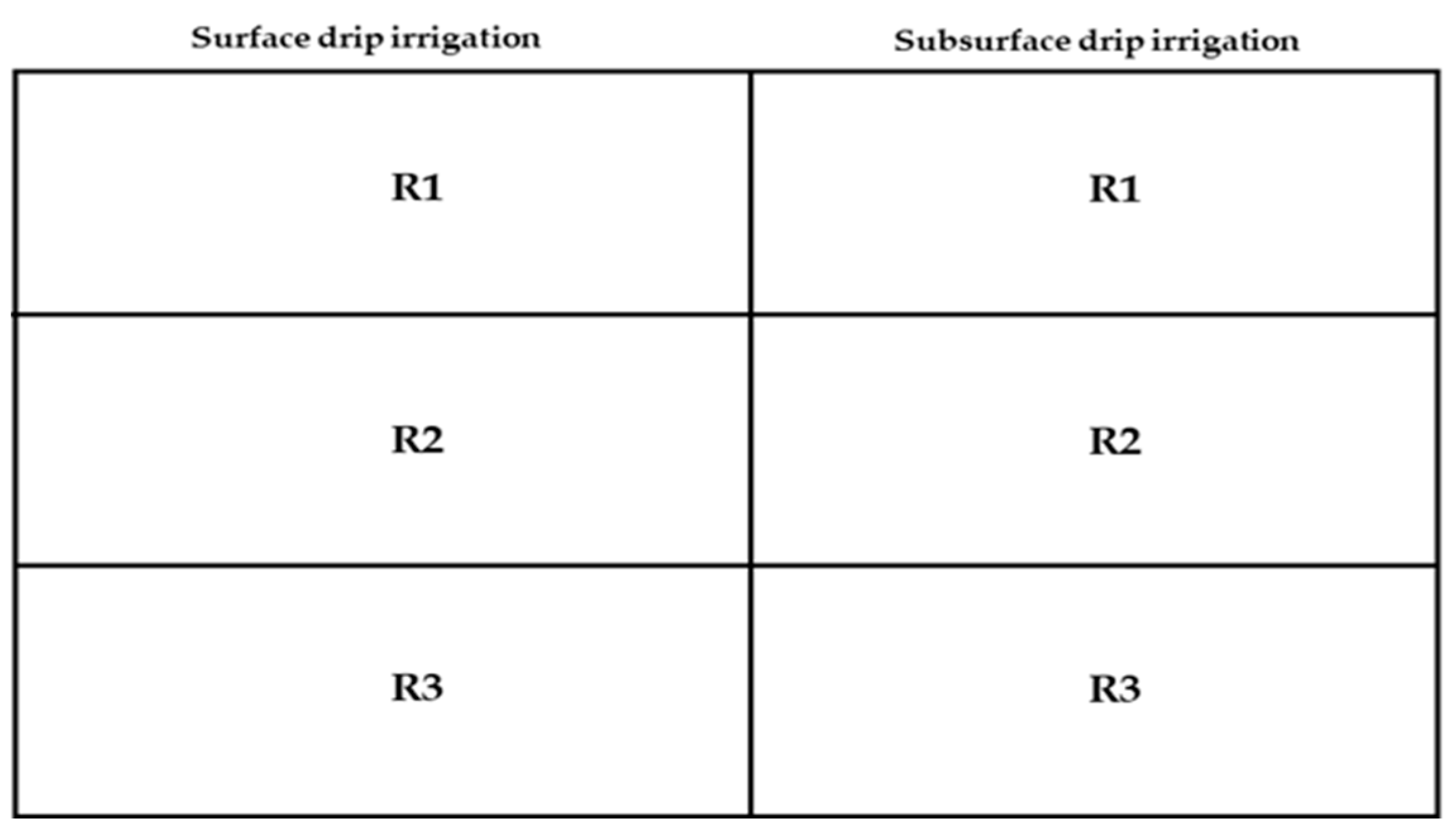
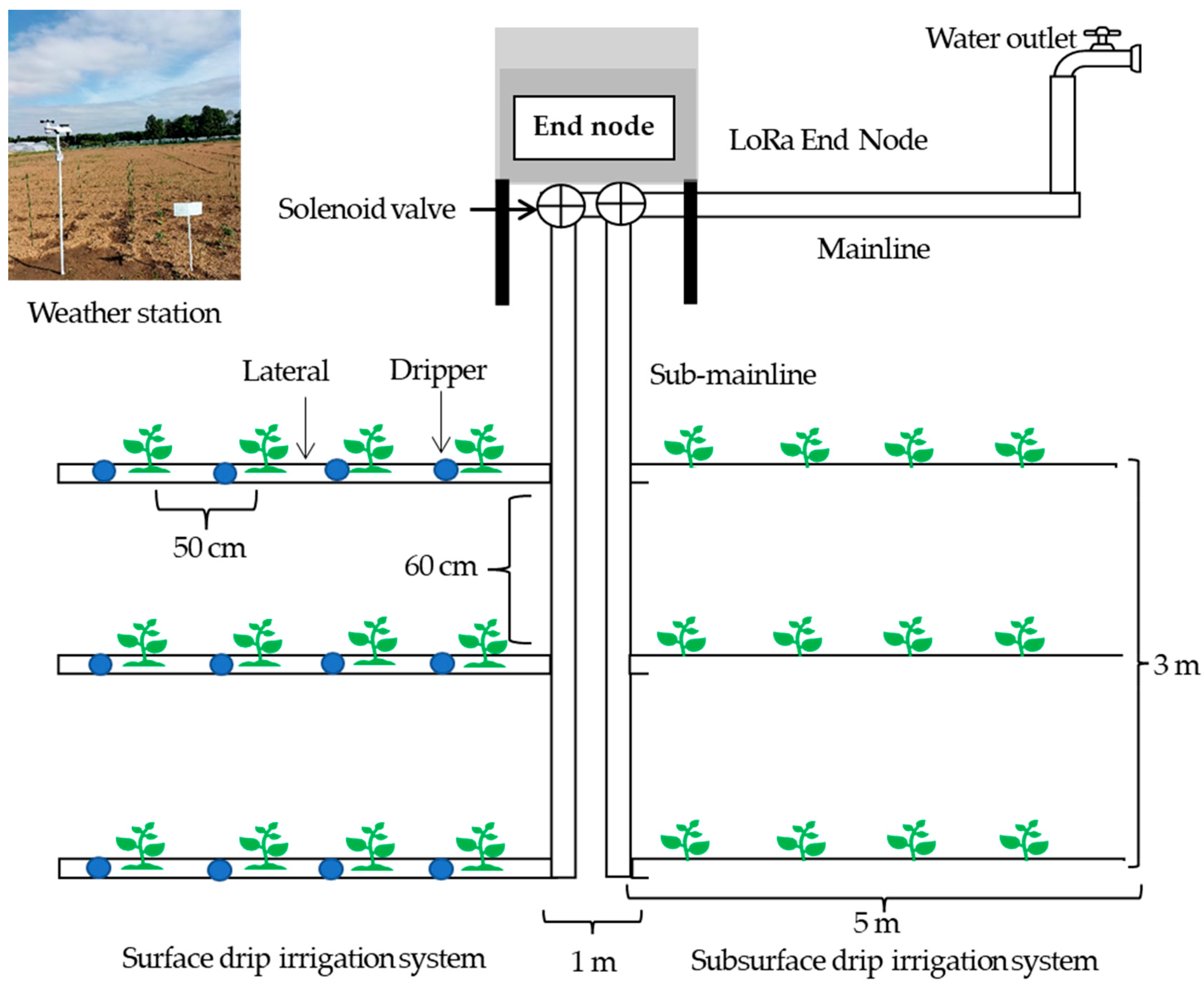
2.7.1. Experimental Field Design and Layout
2.7.2. Irrigation System Installation
2.7.3. Irrigation Scheduling
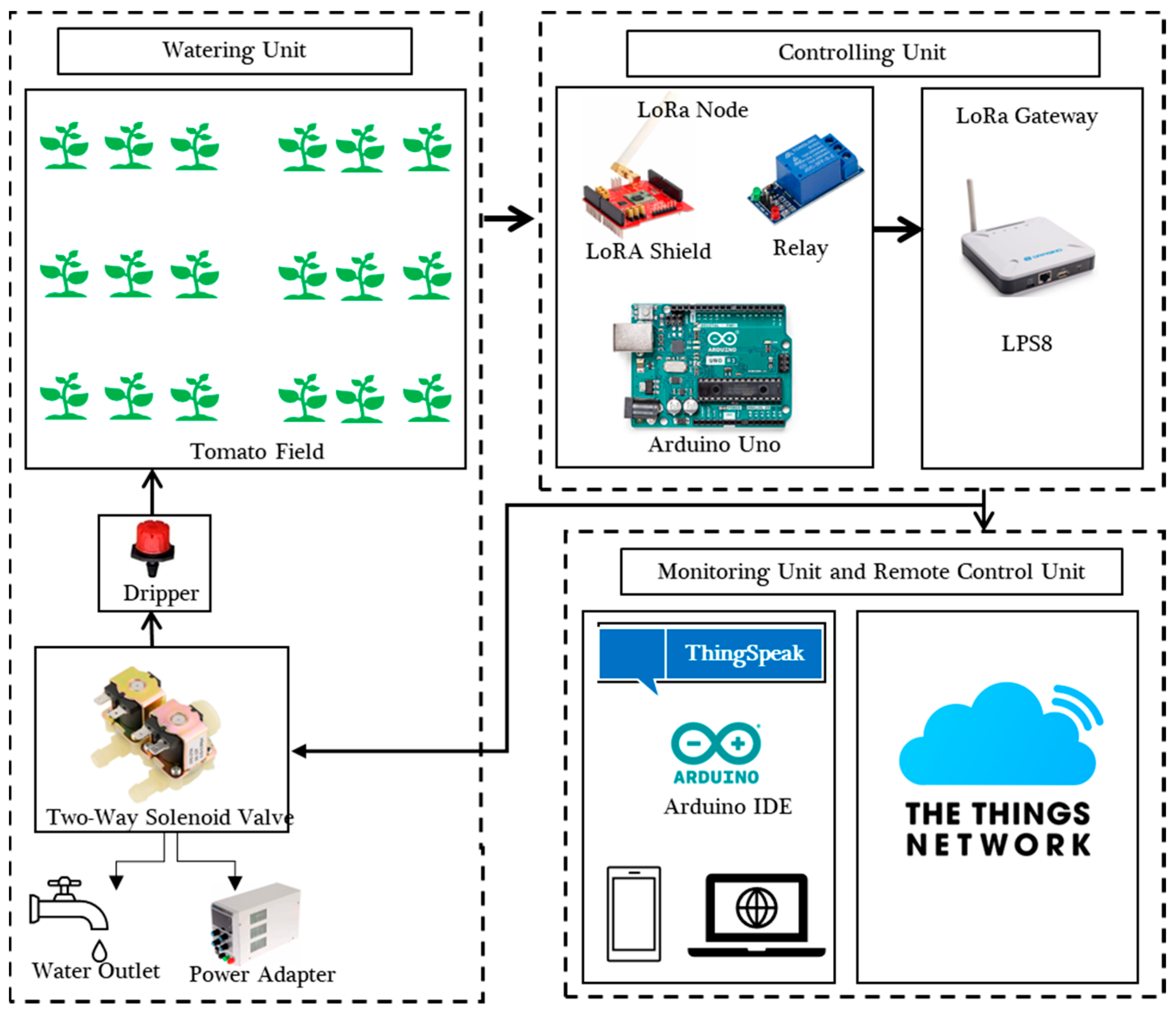
2.7.4. Hardware Components
LoRa Gateway
LoRa Node
3. Results and Discussion
3.1. Indoor Experimental Results
3.1.1. Calibration of Capacitive Soil Moisture Sensor
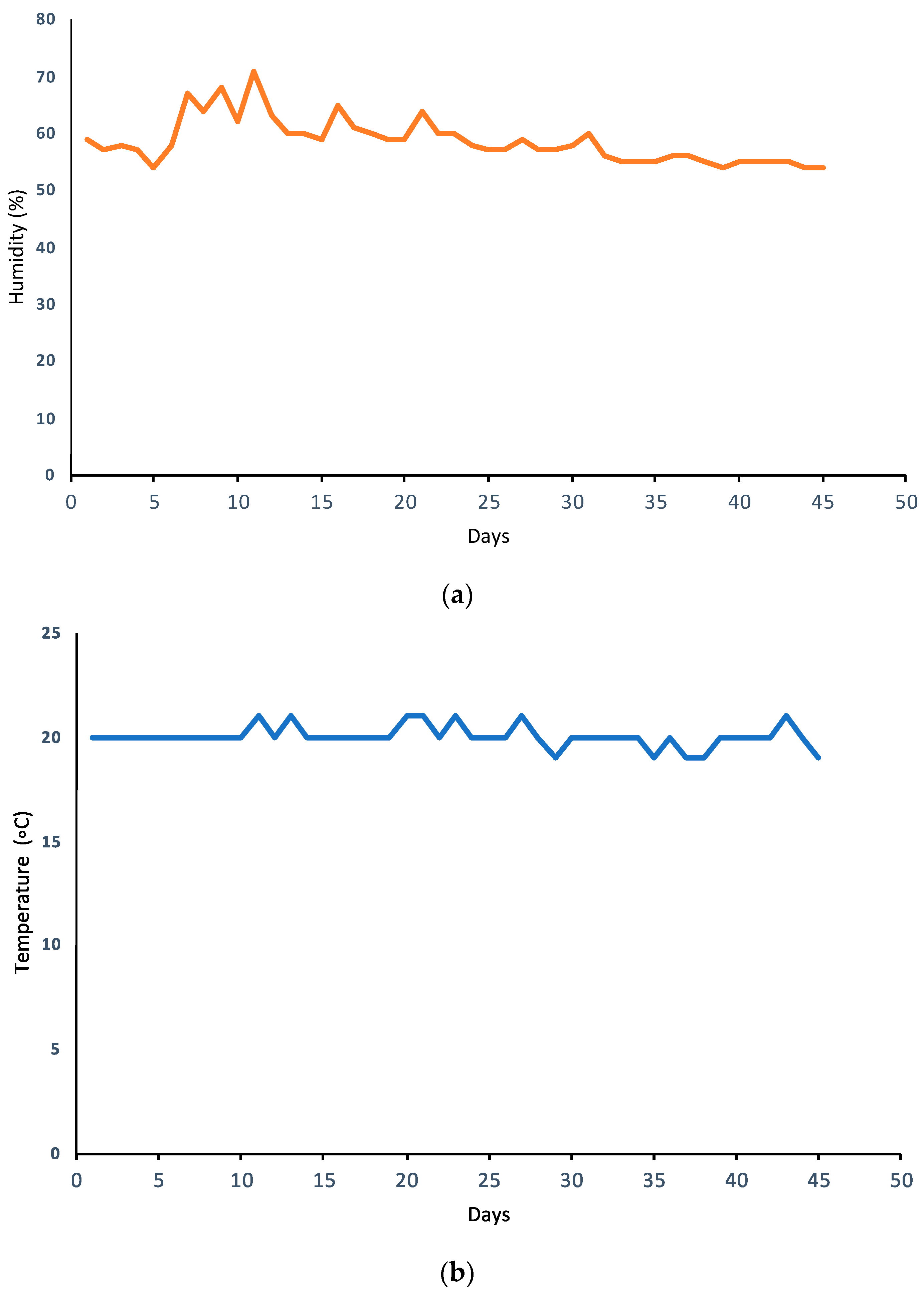
3.1.2. Environmental Conditions
3.1.3. Agronomic Results
3.1.4. Irrigation System Performance
3.2. Outdoor Experimental Results
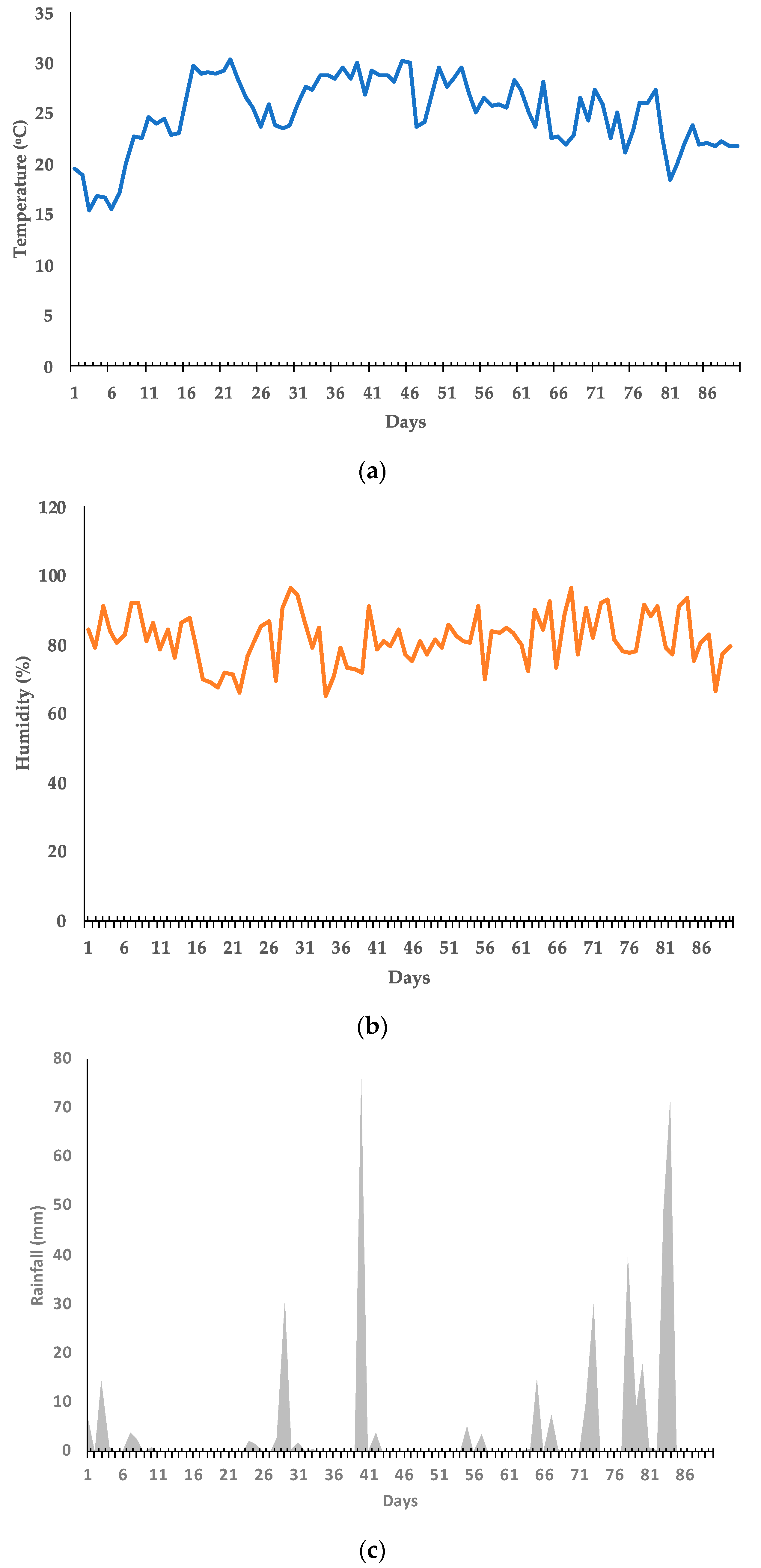
3.2.1. Environmental Conditions
3.2.2. Irrigation System Performance
3.2.3. Tomato Fresh Yield
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ragab, R.; Prudhomme, C. Climate change and water resources management in arid and semi-arid regions: Prospective and challenges for the 21st century. Biosyst. Eng. 2002, 81, 3–34. [Google Scholar] [CrossRef]
- Sharmasarkar, E.C.; Sharmasarkar, S.; Miller, S.D.; Vance, G.F.; Zhang, R. Assessment of drip and flood irrigation on water and fertilizer use efficiencies for sugarbeets. Agric. Water Manag. 2001, 46, 241–251. [Google Scholar] [CrossRef]
- Kiymaz, S.; Ertek, A. Yield and quality of sugar beet (Beta vulgaris L.) at different water and nitrogen levels under the climatic conditions of Kirsehir, Turkey. Agric. Water Manag. 2015, 158, 156–165. [Google Scholar] [CrossRef]
- Nangare, D.D.; Singh, Y.; Kumar, P.S.; Minhas, P.S. Growth, fruit yield and quality of tomato (Lycopersicon esculentum Mill.) as affected by deficit irrigation regulated on phenological basis. Agric. Water Manag. 2016, 171, 73–79. [Google Scholar] [CrossRef]
- Hudson, J.P.; Salter, P.J. Effects of different water-regimes on the growth of tomatoes under glass. Nature 1953, 171, 480–481. [Google Scholar] [CrossRef]
- Li, Q.; Wei, M.; Li, Y.; Feng, G.; Wang, Y.; Li, S.; Zhang, D. Effects of soil moisture on water transport, photosynthetic carbon gain and water use efficiency in tomato are influenced by evaporative demand. Agric. Water Manag. 2019, 226, 105818. [Google Scholar] [CrossRef]
- Huett, D.O. Fertiliser use effciency by containerised nursery plants 1. Plant growth and nutrient uptake. Aust. J. Agric. Res. 1997, 48, 251–258. [Google Scholar] [CrossRef]
- Leskovar, D.I. Root and shoot modification by irrigation. HortTechnology 1998, 8, 510–514. [Google Scholar] [CrossRef]
- Rolfe, C.J.; Currey, A.; Atkinson, I.; Horticultural Research; NSW Agriculture; Nursery Industry Association of Australia. Managing Water in Plant Nurseries: A Guide to Irrigation, Drainage and Water Recycling in Containerised Plant Nurseries; NSW Agriculture: Wollongbar, NSW, Australia, 1994. [Google Scholar]
- Argo, W.R.; Biernbaum, J.A. The effect of irrigation method, water-soluble fertilization, replant nutrient charge, and surface evaporation on early vegetative and root growth of poinsettia. J. Am. Soc. Hortic. Sci. 1994, 120, 163–169. [Google Scholar] [CrossRef]
- Hicklenton, P.R.; Cairns, K.G. Plant water relations and mineral nutrition of containerized nursery plants in relation to irrigation method. Can. J. Plant Sci. 1996, 76, 155–160. [Google Scholar] [CrossRef]
- Du, Y.D.; Cao, H.X.; Liu, S.Q.; Gu, X.B.; Cao, Y.X. Response of yield, quality, water and nitrogen use efficiency of tomato to different levels of water and nitrogen under drip irrigation in Northwestern China. J. Integr. Agric. 2017, 16, 1153–1161. [Google Scholar] [CrossRef]
- Sun, Y.; Hu, K.L.; Fan, Z.B.; Wei, Y.P.; Lin, S.; Wang, J.G. Simulating the fate of nitrogen and optimizing water and nitrogen management of greenhouse tomato in North China using the EU-Rotate_N model. Agric. Water Manag. 2013, 128, 72–84. [Google Scholar] [CrossRef]
- Jiang, H.M.; Zhang, J.F.; Song, X.Z.; Liu, Z.H.; Jiang, L.H.; Yang, J.C. Responses of agronomic benefit and soil quality to better management of nitrogen fertilizer application in greenhouse vegetable land. Pedosphere 2012, 22, 650–660. [Google Scholar] [CrossRef]
- Aujla, M.S.; Thind, H.S.; Buttar, G.S. Fruit yield and water use efficiency of eggplant (Solanum melongema L.) as influenced by different quantities of nitrogen and water applied through drip and furrow irrigation. Sci. Hortic. 2007, 112, 142–148. [Google Scholar] [CrossRef]
- Erdem, T.; Arin, L.; Erdem, Y.; Polat, S.; Deveci, M.; Okursoy, H.; Gultas, H.T. Yield and quality response of drip irrigated broccoli (Brassica oleracea L.) under different irrigation regimes, nitrogen applications and cultivation periods. Agric. Water Manag. 2010, 97, 681–688. [Google Scholar] [CrossRef]
- Zhang, H.X.; Chi, D.C.; Wang, Q.; Fang, J.; Fang, X.Y. Yield and quality response of cucumber to irrigation and nitrogen fertilization under subsurface drip irrigation in solar greenhouse. Agric. Sci. China 2011, 10, 921–930. [Google Scholar] [CrossRef]
- Wang, F.X.; Wu, X.X.; Shock, C.C.; Chu, L.Y.; Gu, X.X.; Xue, X. Effects of drip irrigation regimes on potato tuber yield and quality under plastic mulch in arid Northwestern China. Field Crops Res. 2011, 122, 78–84. [Google Scholar] [CrossRef]
- Kuscu, H.; Turhan, A.; Ozmen, N.; Aydinol, P.; Demir, A.O. Optimizing levels of water and nitrogen applied through drip irrigation for yield, quality, and water productivity of processing tomato (Lycopersicon esculentum Mill.). Hortic. Environ. Biotechnol. 2014, 55, 103–114. [Google Scholar] [CrossRef]
- Gutiérrez, J.; Villa-Medina, J.F.; Nieto-Garibay, A.; Porta-Gándara, M.Á. Automated irrigation system using a wireless sensor network and GPRS module. IEEE Trans. Instrum. Meas. 2013, 63, 166–176. [Google Scholar] [CrossRef]
- Romano, E.; Bergonzoli, S.; Abu El Khair, D.; Comolli, R.; Ferré, C.; Bisaglia, C. Monitoring the uniformity of soil permeability for orchard precision irrigation. Acta Hortic. 2021, 1314, 99–108. [Google Scholar] [CrossRef]
- Romano, E.; Bergonzoli, S.; Bisaglia, C.; Picchio, R.; Scarfone, A. The Correlation between Proximal and Remote Sensing Methods for Monitoring Soil Water Content in Agricultural Applications. Electronics 2023, 12, 127. [Google Scholar] [CrossRef]
- Wan, X.; Li, B.; Chen, D.; Long, X.; Deng, Y.; Wu, H.; Hu, J. Irrigation decision model for tomato seedlings based on optimal photosynthetic rate. Int. J. Agric. Biol. Eng. 2021, 14, 115–122. [Google Scholar] [CrossRef]
- Ors, S.; Ekinci, M.; Yildirim, E.; Sahin, U.; Turan, M.; Dursun, A. Interactive effects of salinity and drought stress on photosynthetic characteristics and physiology of tomato (Lycopersicon esculentum L.) seedlings. S. Afr. J. Bot. 2021, 137, 335–339. [Google Scholar] [CrossRef]
- He, Z.H.; Li, M.N.; Cai, Z.L.; Zhao, R.S.; Hong, T.T.; Yang, Z.; Zhang, Z. Optimal irrigation and fertilizer amounts based on multi-level fuzzy comprehensive evaluation of yield, growth and fruit quality on cherry tomato. Agric. Water Manag. 2021, 243, 106360. [Google Scholar] [CrossRef]
- Elkelish, A.A.; Alhaithloul, H.A.S.; Qari, S.H.; Soliman, M.H.; Hasanuzzaman, M. Pretreatment with Trichoderma harzianum alleviates waterlogging-induced growth alterations in tomato seedlings by modulating physiological, biochemical, and molecular mechanisms. Environ. Exp. Bot. 2020, 171, 103946. [Google Scholar] [CrossRef]
- Liu, H.; Duan, A.-W.; Li, F.-S.; Sun, J.-S.; Wang, Y.-C.; Sun, C.-T. Drip irrigation scheduling for tomato grown in solar greenhouse based on pan evaporation in North China plain. J. Integr. Agric. 2013, 12, 520–531. [Google Scholar] [CrossRef]
- Ray, J.D.; Sinclair1, T. The effect of pot size on growth and transpiration of maize and soybean during water deficit stress. J. Exp. Bot. 1998, 49, 1381–1386. [Google Scholar] [CrossRef]
- Ekanayake, I.J.; De Datta, S.K.; Steponkus, P.L. Effect of water deficit stress on diffusive resistance, transpiration, and spikelet desiccation of rice (Oryza sativa L.). Ann. Bot. 1993, 72, 73–80. [Google Scholar] [CrossRef]
- Sibomana, I.C.; Aguyoh, J.N.; Opiyo, A.M. Water stress affects growth and yield of container grown tomato (Lycopersicon esculentum Mill) plants. GJBB 2013, 2, 461–466. [Google Scholar]
- Al-Omran, A.M.; Al-Harbi, A.R.; Wahb-Allah, M.A.; Mahmoud, N.; Al-Eter, A. Impact of irrigation water quality, irrigation systems, irrigation rates and soil amendments on tomato production in sandy calcareous soil. Turk. J. Agric. For. 2010, 34, 59–73. [Google Scholar] [CrossRef]
- Zhao, F.; Yoshida, H.; Goto, E.; Hikosaka, S. Development of an Irrigation Method with a Cycle of Wilting–Partial Recovery Using an Image-Based Irrigation System for High-Quality Tomato Production. Agronomy 2022, 12, 1410. [Google Scholar] [CrossRef]
- Ella, V.B.; Reyes, M.R.; Yoder, R. Effect of Hydraulic Head and Slope on Water Distribution Uniformity of a Low-Cost Drip Irrigation System. 2008. Available online: www.oired.vt.edu (accessed on 3 February 2023).
- Andales, A.A.; Chávez, J.L.; Bauder, T.A. Irrigation Scheduling: The Water Balance Approach. Ph.D. Thesis, Colorado State University, Fort Collins, CO, USA, 2011. [Google Scholar]
- Sui, R.; Pringle, H.C.; Barnes, E.M. Evaluation of soil moisture sensors. In Proceedings of Irrigation Show and Education Conference; Irrigation Association: Falls Church, VA, USA, 2013. [Google Scholar]
- Gu, Z.; Qi, Z.; Burghate, R.; Yuan, S.; Jiao, X.; Xu, J. Irrigation scheduling approaches and applications: A review. J. Irrig. Drain. Eng. 2020, 146, 04020007. [Google Scholar] [CrossRef]
- Asrar, A.A.; Abdel-Fattah, G.M.; Elhindi, K.M. Improving growth, flower yield, and water relations of snapdragon (Antirhinum majus L.) plants grown under well-watered and water-stress conditions using arbuscular mycorrhizal fungi. Photosynthetica 2012, 50, 305–316. [Google Scholar] [CrossRef]
- Nolz, R.; Kammerer, G. Evaluating a sensor setup with respect to near-surface soil water monitoring and determination of in-situ water retention functions. J. Hydrol. 2017, 549, 301–312. [Google Scholar] [CrossRef]
- Elmaloglou, S.; Soulis, K.X.; Dercas, N. Simulation of soil water dynamics under surface drip irrigation from equidistant line sources. Water Resour. Manag. 2013, 27, 4131–4148. [Google Scholar] [CrossRef]
- Higashide, T.; Heuvelink, E. Physiological and morphological changes over the past 50 years in yield components in tomato. J. Am. Soc. Hortic. Sci. 2009, 134, 460–465. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Treatment | Germination (%) | Root Length (cm) | Root Weight (g Plant −1) | Shoot Length (cm) | Shoot Weight (g Plant−1) | Seedling Weight (g Plant−1) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Threshold | SD | SbD | SD | SbD | SD | SbD | SD | SbD | SD | SbD | SD | SbD |
| 5% | 67 b | 50 b | 4.4 | 3.2 | 1.06 c | 0.54 | 7.1 b | 14.25 | 1.27 b | 1.06 b | 1.59 | 1.31 |
| 8% | 84 ab | 67 b | 4.9 | 3.85 | 1.72 b | 2.27 | 7.2 b | 19.55 | 1.88 b | 2.93 b | 2.04 | 2.86 |
| 12% | 100 a | 100 a | 4.8 | 6 | 2.03 a | 2.07 | 10.2 b | 26.75 | 4.75 a | 8.16 a | 2.07 | 6.02 |
| 15% | 100 a | 100 a | 4.8 | 4.5 | 0.9 c | 1.2 | 17 a | 15 | 1.2 b | 2.02 b | 1.2 | 4 |
| p * | <0.001 | <0.001 | 0.983 | 0.22 | <0.001 | 0.048 | <0.001 | 0.494 | 0.004 | <0.001 | 0.27 | 0.06 |
| S.E 1 | 7.38b | 11.78 | 1.23 | 1.34 | 0.23 | 0.82 | 1.27 | 7.97 | 0.99 | 2.57 | 0.62 | 1.91 |
| Irrigation System | Irrigation Distribution Uniformity | |
|---|---|---|
| Indoor | Outdoor | |
| Subsurface drip irrigation | 0.88 | 0.72 |
| Surface drip irrigation | 0.92 | 0.82 |
| Irrigation System | Fresh Yield (g Plant−1) |
|---|---|
| Subsurface drip irrigation | 1243 |
| Surface drip irrigation | 1061 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seyar, M.H.; Ahamed, T. Development of an IoT-Based Precision Irrigation System for Tomato Production from Indoor Seedling Germination to Outdoor Field Production. Appl. Sci. 2023, 13, 5556. https://doi.org/10.3390/app13095556
Seyar MH, Ahamed T. Development of an IoT-Based Precision Irrigation System for Tomato Production from Indoor Seedling Germination to Outdoor Field Production. Applied Sciences. 2023; 13(9):5556. https://doi.org/10.3390/app13095556
Chicago/Turabian StyleSeyar, Mohammad Hussain, and Tofael Ahamed. 2023. "Development of an IoT-Based Precision Irrigation System for Tomato Production from Indoor Seedling Germination to Outdoor Field Production" Applied Sciences 13, no. 9: 5556. https://doi.org/10.3390/app13095556
APA StyleSeyar, M. H., & Ahamed, T. (2023). Development of an IoT-Based Precision Irrigation System for Tomato Production from Indoor Seedling Germination to Outdoor Field Production. Applied Sciences, 13(9), 5556. https://doi.org/10.3390/app13095556