5.1. Fuzzy Logic for Modeling Emotions
The technique for modeling emotions depends largely on the method of knowledge acquisition employed. In this case, the rules were obtained from the experience of a psychologist who provided the linguistic values for each emotion, as well as the inference rules to be implemented in the model. Clearly, fuzzy logic is the most appropriate technique to handle vague concepts and to perform the approximate reasoning required by the information obtained from the human expert [
64,
65].
Let
be the vector of stimuli,
the vector of emotions, and
the vector of robot output variables. It is proposed to use a state variable model to define the dynamic behavior of the emotional system, in which each emotional dimension
depends on its previous state and the stimulus vector
, according to Equation (
1) [
66].
where
i corresponds to each of the emotional dimensions that integrate the vector of emotions.
Likewise, each output is a function of the emotional state, as shown in Equation (
2) [
66].
where
j corresponds to each of the robot outputs that integrate the vector of the robot output variables.
In this way, the function f is therefore responsible for relating the input stimuli produced in the robot to its emotional state, while function g is in charge of relating the emotional state with the emotional responses of the robot, i.e., its outputs.
Without a precise mathematical model of the above functions
f and
g, using artificial intelligence heuristic techniques to obtain them is interesting. Specifically, it is proposed to use a rule-based system using fuzzy logic as an inference mechanism. In previous work, a dynamic model in state-space had already been used to represent the emotional state of a robot [
67]; however, the model (
f and
g) was linear and fuzzy logic was used only to compute the coefficients in each iteration.
This time, this work proposes to use rules directly and obtain them empirically based on consultation with an expert in the field, specifically a psychologist. In this way, the functions
f and
g can be modeled using two tables of rules that look similar to
Table 2 and
Table 3.
The use of fuzzy logic for the inference mechanism on these rules is justified by the fact that the transitions from one state to another (low, normal, high) are not abrupt, as well as that both the data coming from the stimuli
and the output
take quantitative values [
68,
69,
70].
The model is dynamic since the table of rules corresponding to the function
g (the state depends on its previous value) corresponds to the temporal evolution of a being’s emotions, as they do not normally change their state instantaneously. This leads to addressing the stability of the presented dynamical model with some care. It is a first-order dynamical system that, starting from a stable state (e.g.,
low and
normal), if the input does not change, the state does not change either, while if the input changes (to, e.g.,
normal), the state must evolve until it stabilizes at a new value (e.g.,
low). In
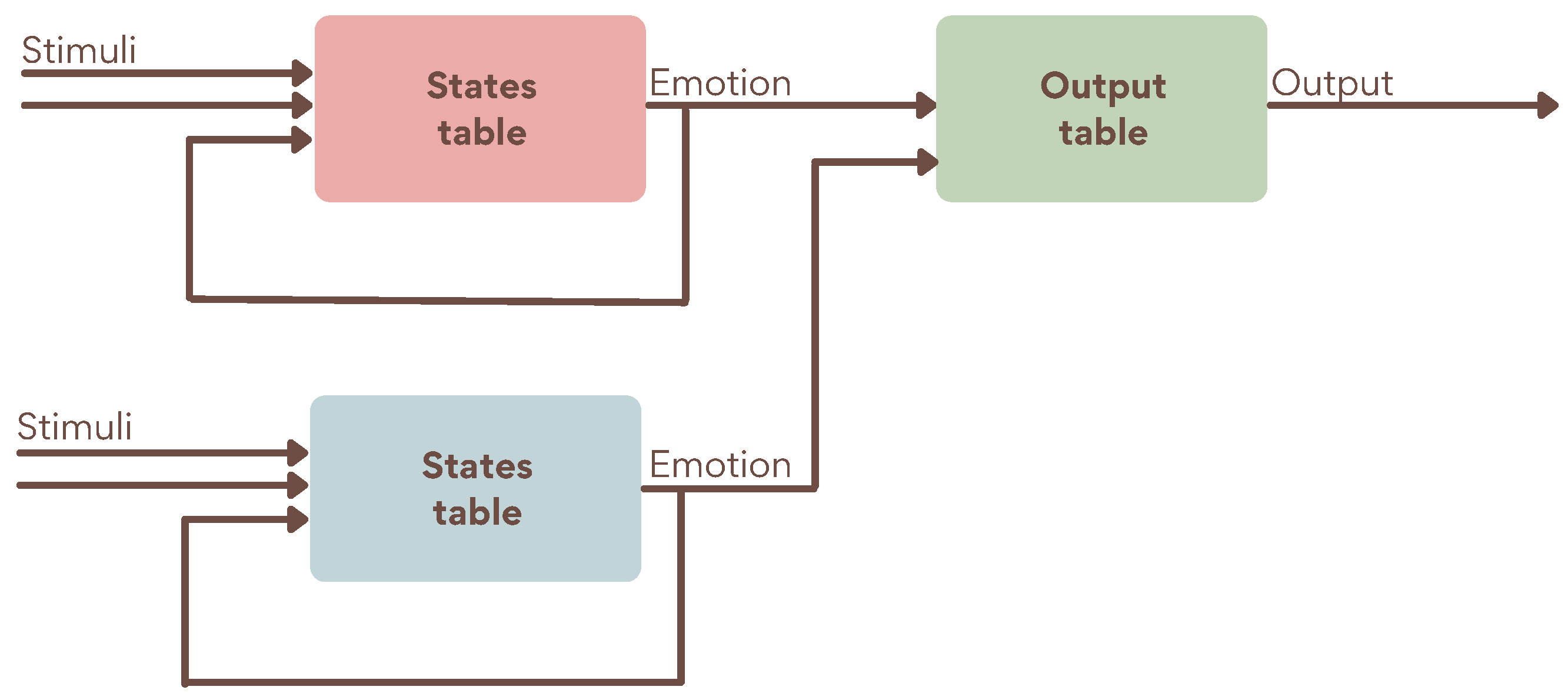
Table 4, these stable equilibrium positions have been marked in bold. A scheme of the model can be seen in
Figure 6.
In the table’s design, special attention should be paid to ensure that transitions from one steady state always lead to another steady state. For example, in the previous example, where the stimulus
transitions from high to normal, the intermediate states marked in
Table 4 would be traversed until the new final steady state is reached (following the direction of the arrow). The use of fuzzy logic for the inference mechanism on these rules is justified because the transitions from one state to another (low, normal, high) are not abrupt. As well as that, both the data coming from the stimuli
and the output
take quantitative values [
68,
69,
70].
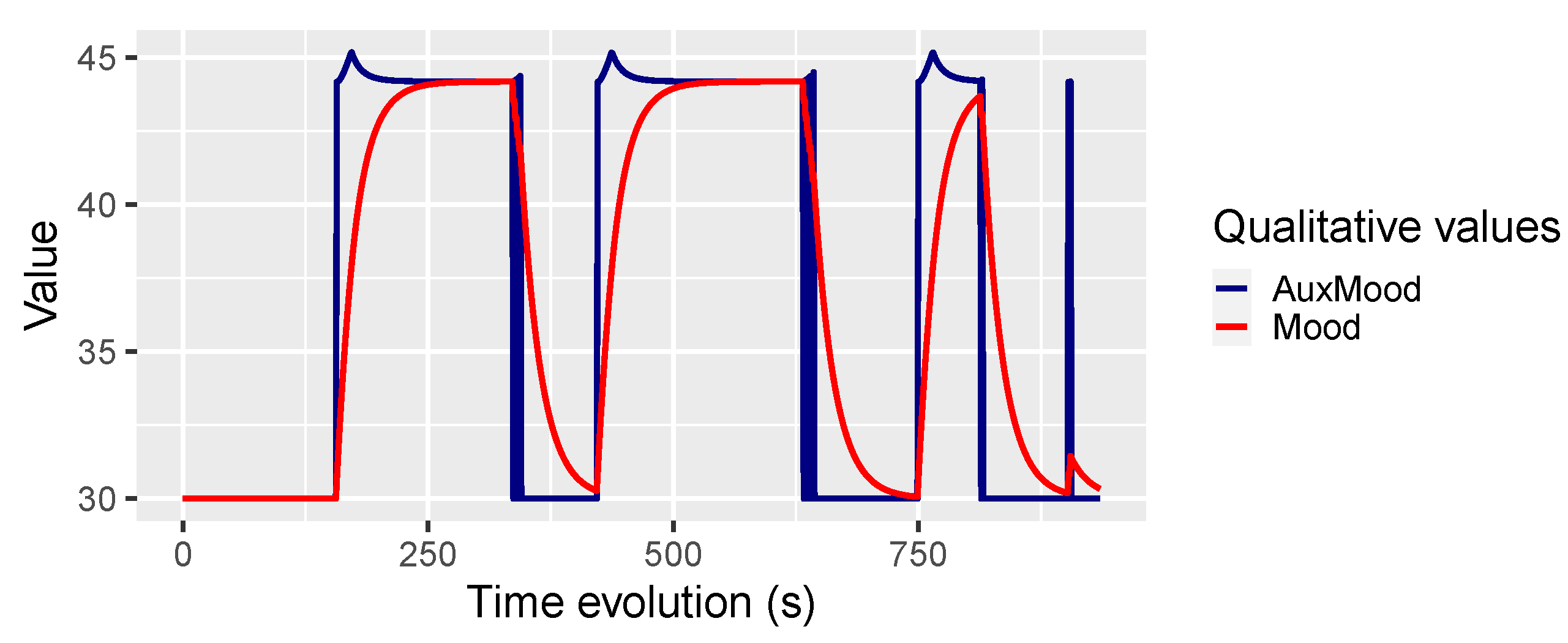
Finally, to implement more realistic emotions evolution, this work relies on DeLoux’s research [
71]. The author argued that, after passing through the sensory thalamus, there was a pathway through the sensory cortex to build a more conscious, contextual response that was obviously slower than the other response. This emotional reaction is obtained by passing directly through the amygdala. Since the robot is intended to be calm, each emotion has its own dynamics, implemented as a first-order system with a time constant parameter (τ) representing a delay. If this delay were not included, changes in emotions would be expressed as soon as a stimulus is received. Equation (
3) shows how the filter should be applied to avoid having an emotion with abrupt changes, achieving a smoother evolution [
72].
where
smooth_emotion results from applying the delay filter,
τ is the time constant,
sharp_emotion is the unfiltered input, and
s represents the time in the Laplace domain.
The delay constant depends on the emotion, and its variation depends on whether the model considers it instantaneous. For example, the emotion ALERTNESS, which expresses fear, has a much more immediate effect than MOOD, which influences the expression of happiness. These constants must be determined experimentally. For the system proposed in this paper, τ has a value of 10 for the emotional dimension of ALERTNESS and 20 for MOOD.
5.2. Giving Personality to the Robot
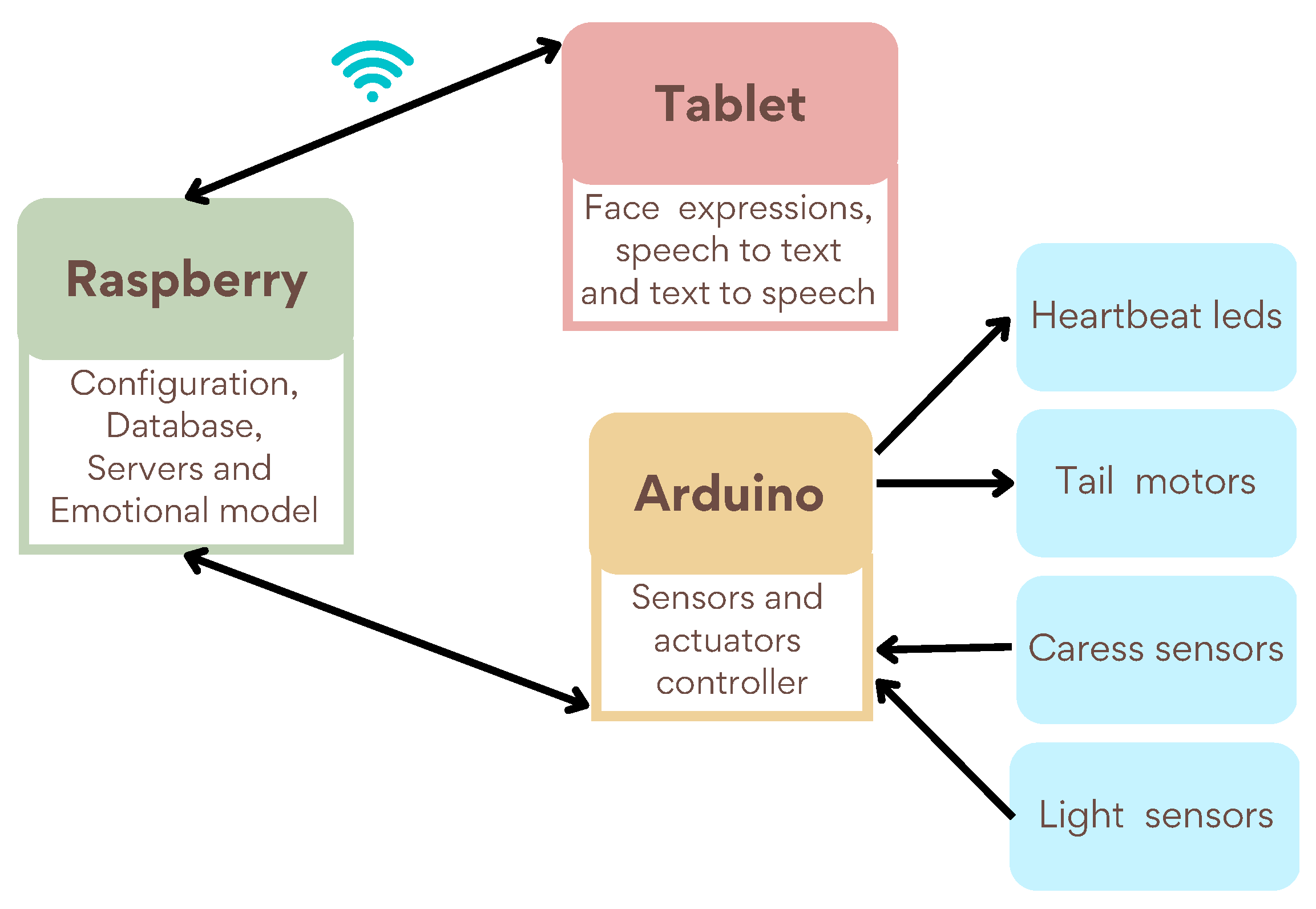
Figure 7 shows the general scheme of the state model that has been designed and programmed into the robot. It relates the input stimuli to the internal emotional state and its effects on the robot’s outputs.
The implemented model includes only two of the six basic emotional dimensions: the happiness–sadness continuum (MOOD) and the fear–calm continuum (ALERTNESS). The fear–calm continuum is affected by different stimuli, battery charge level, and ambient light level, and the happiness–sadness continuum is affected by battery charge level and caress intensity. Regarding the outputs, three have been used: heartbeat, tail movement, and facial expressions. The first is influenced by the fear–calm continuum, the second by the happiness–sadness continuum, and the third by both emotional dimensions.
A stimulus can affect more than one dimension, and these are affected by more than one stimulus at the same time. The same happens with expressions: they can depend only on one emotion or result from a mixture of several. In addition, each emotion will be affected by its previous state and will have a certain dynamic or speed of response.
As can be seen, the emotional model can become quite complex as the number of variables (inputs, states, and outputs) increases; it was decided to use fuzzy logic to facilitate the modeling process. The rules are defined according to the personality given to the robot. In addition to being afraid of the dark and liking physical contact, it has other traits that will be included once it can handle more complex stimuli. In particular, its personality may be similar to that of a curious toddler. Its favorite word is “swarm” because it implies movement as a whole. It enjoys classical music, jazz, and reading about remote places and endangered species. It knows a lot about animals, space, construction materials, and interior design. It fears cockroaches, and becomes nervous if asked too many questions in a row.
5.2.1. Modeling of Robot ALERTNESS
The first component of the robot’s emotional state revolves around the ALERTNESS dimension (battery/light–alert–heartbeat). Thus, the less light the system detects or the lower the charge, the more alert the robot will become, and this will be reflected, consequently, in the increase of the heartbeat rate. Therefore, the following possible qualitative values have been defined for each of the variables:
ALERTNESS: fear, standard, and calm.
Light: very dark, dark, normal, bright, and very bright.
Battery: low, medium, and high.
Heartbeat: slow, standard, and fast.
As can be seen, for the variable light, five qualitative values have been proposed to increase the sensitivity of the emotion to it. The rules are shown in the form of tables to facilitate their understanding. There will be two tables, from stimulus to emotion and emotion to expression.
Table 5 represents the first case.
These tables should read as follows, for example:
In this situation, as long as the value of any of the inputs (light or battery) does not change, it is unfeasible for the alert state to change, i.e., it corresponds to a stable equilibrium state. It is also important to note that the table reflects several possible, stable states, highlighted in bold. Nevertheless, suppose the light starts to darken. In that case, the output of the rule corresponding to low battery and dark light will bring the ALERTNESS state to standard, stabilizing it to that state:
This will remain so until the light becomes very dark or returns to normal. Note, however, that in
Table 5 for medium or high battery, it is impossible to reach the standard value for ALERTNESS in a stable way, as there is no stable point for this value. In the same way, when the robot has a low battery, it is only able to feel calm or fear. It is relevant to note that the absence of necessary stable states would cause a fluctuation in emotions, making the system unstable.
Furthermore, it is worth noting that since the proposed emotional model can be adapted to any personality, and the rules define this, a specific personality has been implemented in this work. Specifically, the proposed robot is cheerful and relatively calm.
Table 5 reflects that, indeed, the robot’s personality is quite calm. The configuration of rules in the tables above is governed by the robot’s fear of the dark. Nevertheless, as it is a relatively calm robot, a rather low level of light (very dark) will be necessary to scare it and make it feel fear. However, most of the robot’s states correspond to the calm state.
Secondly, the rules relating emotion to expression are shown in
Table 6. As can be seen, the relationship is straightforward and consists of a single input, thus lacking dynamics. The behavior of the heartbeat concerning ALERTNESS follows a simple biological or/and social pattern: as the value of ALERTNESS increases, the speed of the heartbeat increases. Thus, by joining these rule tables with the previous ones, as the light decreases, the ALERTNESS value becomes fear, and the heartbeat of the robot’s heart accelerates.
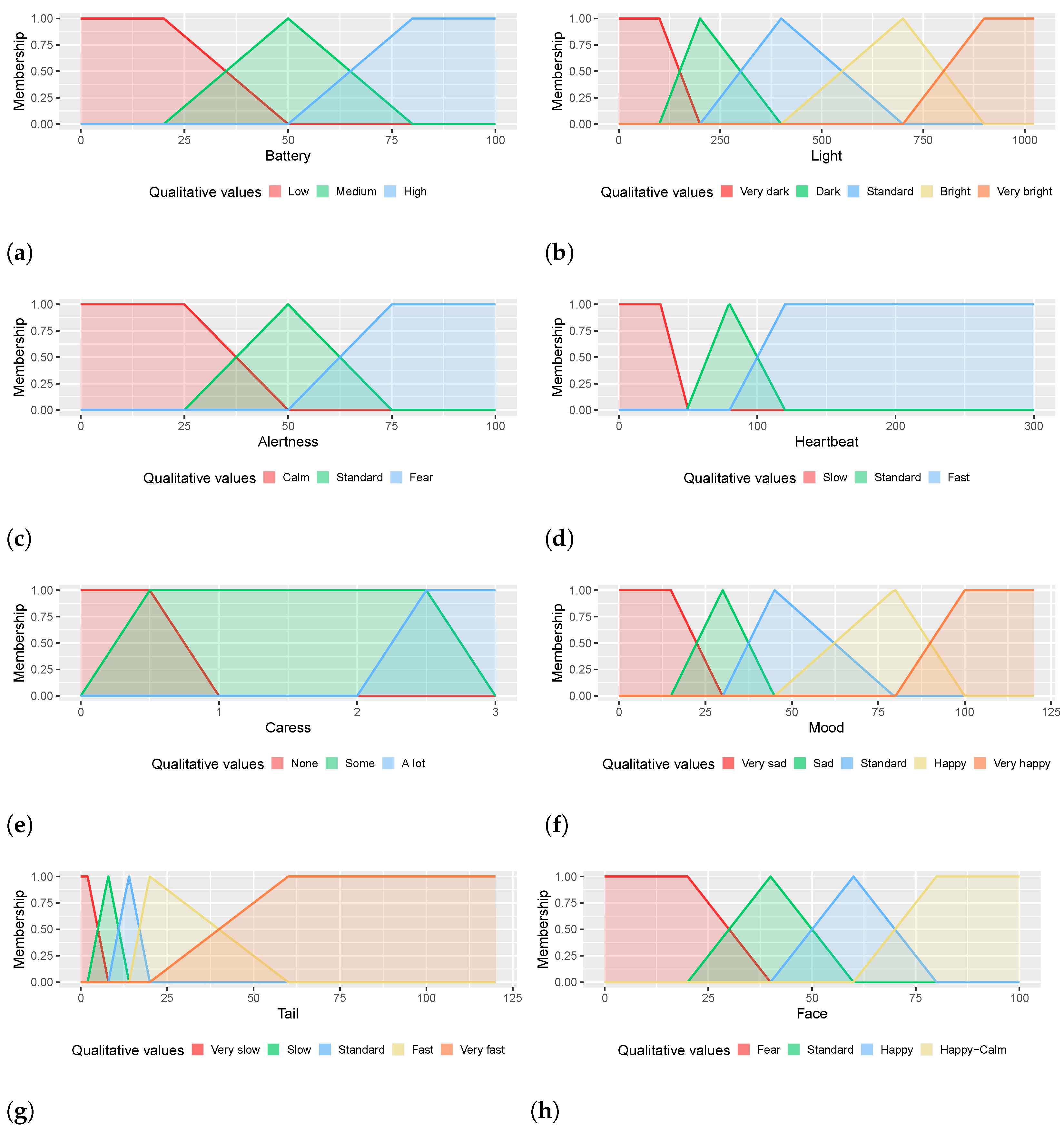
The last step in defining the model of the robot’s ALERTNESS state is to associate the above qualitative values with numerical values. This is formalized with the definition of its membership functions, which are depicted in
Figure 8a–d.
5.2.2. Modeling of the Robot’s State of Mind
The second component of the robot’s emotional state deals with MOOD (battery/caress–MOOD–tail), which reflects the robot’s state of happiness. Thus, caressing the robot in a certain way (employing two touch sensors) varies its state of happiness, as well as the speed of its tail movement. Thus, the following possible qualitative values have been defined for each of the variables:
MOOD: very sad, sad, standard, happy, and very happy.
Caress: none, little, and very much.
Battery: low, medium, and high.
Tail: very slow, slow, normal, fast, and very fast.
For the variable MOOD, five qualitative values have been proposed to increase the sensitivity of this emotional dimension. The rules are shown in the following tables.
Table 7 and
Table 8 represent how stimuli are related to emotion cases.
These tables may be slightly more complex than the previous ones because the emotional dimension has five instead of three possible values. However, their interpretation is the same, for example:
The steady states indicated in bold in the table are shown. It is impossible to reach a very happy, steady state when the battery is low. A peculiar detail of these tables is that there is more than one steady state of MOOD for some values of caress. This has several interesting implications. First, by varying only the input caress, it is impossible to cycle through all the possible states of a single table as long as the value of the battery does not change. For example, if the robot starts with high battery (
Table 8) and both antennas are stroked (e.g., the value of caress would be very much), the steady state is happy. Starting from this state, if the user suddenly stops touching the two antennae simultaneously, caress would be nothing, and the previous value of MOOD would be happy, so that the robot would be, again, at a stable point. On the other hand, if only one of the two antennae is touched, a new stable state would be reached at very happy. If the value of caress is varied further from here, it can be seen that, without further changes, the values standard, sad, and fear cannot be reached, nor is it possible to pass through them, but the battery-charge value must also be changed.
It should be added that the rules have been designed considering that the robot likes to be caressed, but not too much, which is why it can be seen in
Table 8 that the very happy state is only reached when caress is worth little. Again, this idea is marked by the personality endowed to the robot. Finally, it should be noted that in none of the previous tables (
Table 7 and
Table 8) can the value very sad be reached, no matter how much the values of caress and battery are modified. At first sight, it may seem like a design flaw, but in the future and with more complex implementations, this emotional dimension will be affected by other stimuli that make it possible to achieve this state.
Secondly, the table that relates emotion to expression is shown (
Table 9).
As with the previous dimension, these rules follow a biological pattern: the happier the robot is, the faster it will wag its tail as a sign of happiness. Summarizing the global behavior of this dimension, when the robot is stroked, its mood varies, preferring to be stroked only a little; the more comfortable it is and the more it likes the stroking, the faster it will move its tail.
Figure 8e–g show the belonging functions of MOOD and tail, since those of battery are logically the same as those presented in the previous section.
5.2.3. Modeling of the Robot’s Facial Expressions
This interaction relates the two emotional dimensions already discussed (ALERTNESS/MOOD facial expressions) and allows the display of gestures that reflect the general state of the robot. The facial expressions should encompass all the emotions that the robot may feel. The following possible qualitative values have been used for this purpose:
MOOD: very sad, sad, standard, happy, and very happy.
ALERTNESS: fear, standard, and calm.
Facial expressions: standard, happy, happy–calm, and fear.
As can be seen, facial expressions are considered to be a combination of the MOOD and ALERTNESS dimensional emotions unless ALERTNESS means fear, in which case the dominant expression is fear, thus blocking the rest of the emotions. The membership functions can be seen in
Figure 8h.
Again, the Table must be understood as in the previous two cases, following the structure “IF input1 IS input_value1 AND input2 IS input_value2 THEN output IS output_value”. In the present case with these rules, input1 corresponds to alert; therefore, input_value1 varies between calm, standard, and fear. On the other hand, input2 again represents the previous value of mood, so its input_value2 will be bery cheerful, cheerful, standard, sad, or very sad. Finally, the output is equivalent to the general State, and therefore output_value can vary between cheerful–calm, cheerful, standard, and fearful.
The basis of these rules would be: “when the robot is afraid, all other feelings are blocked”. Thus, if and only the emotional dimension alertness marks “Fear”, it will be scared. In all other cases, a distinction will be made between standard, happy, or happy and calm. The standard state will occur when he is “Sad” or “Very Sad”, regardless of the value of alertness, or when both inputs are “Standard”. On the other hand, Potato will feel cheerful–calm when it is in a state of “Calm” and “Cheerful” or “Very Cheerful”. Finally, he will be “Happy” in situations where both mood and alertness are “Standard”, and the other emotion is either “Cheerful”, “Very Cheerful”, or ”Calm”.
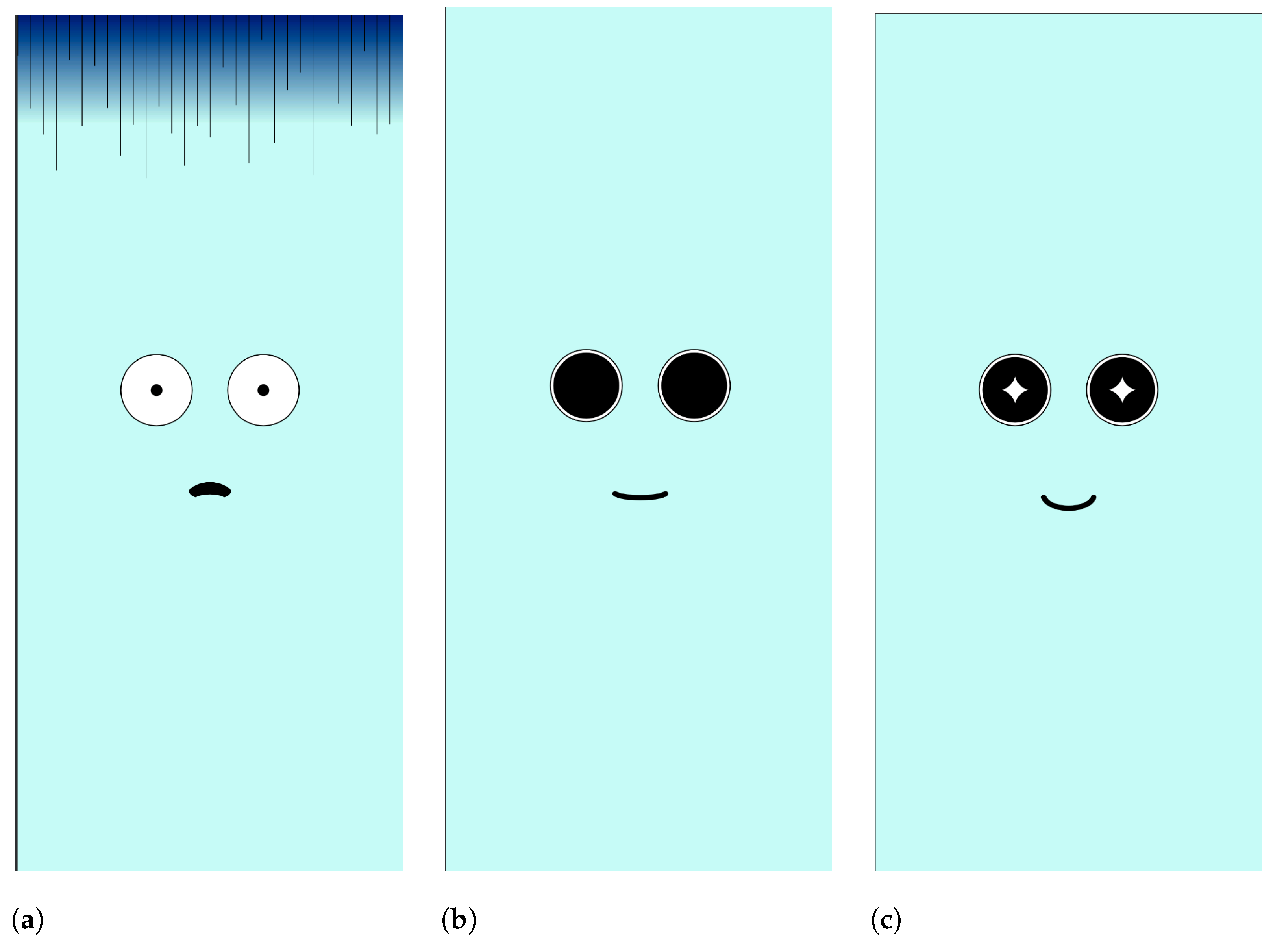
Figure 9 shows a snapshot of the different faces that the robot can express. The fuzzy labels that appear in
Figure 8h are those related to facial expressions. It can be seen that even though there are four labels, only three faces are represented. This is because the robot has a cheerful personality, so the face corresponding to the standard label is the same as the cheerful one; when the predominant emotion is fear, the robot shows the face illustrated in
Figure 9a. If the most significant emotion is standard or happy, then the face used is the one in
Figure 9b. Otherwise, if the robot is happy and calm, the face that appears is
Figure 9c.
Once the implementation of the system has been studied, we proceed to explain the experiments performed and the results obtained.




 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}