


Workspace Analysis and Path Planning of a Novel Robot Configuration with a 9-DOF Serial-Parallel Hybrid Manipulator (SPHM)

 ,
,  ,
, 

Abstract
1. Introduction
2. Structure Design of the Hybrid Manipulator
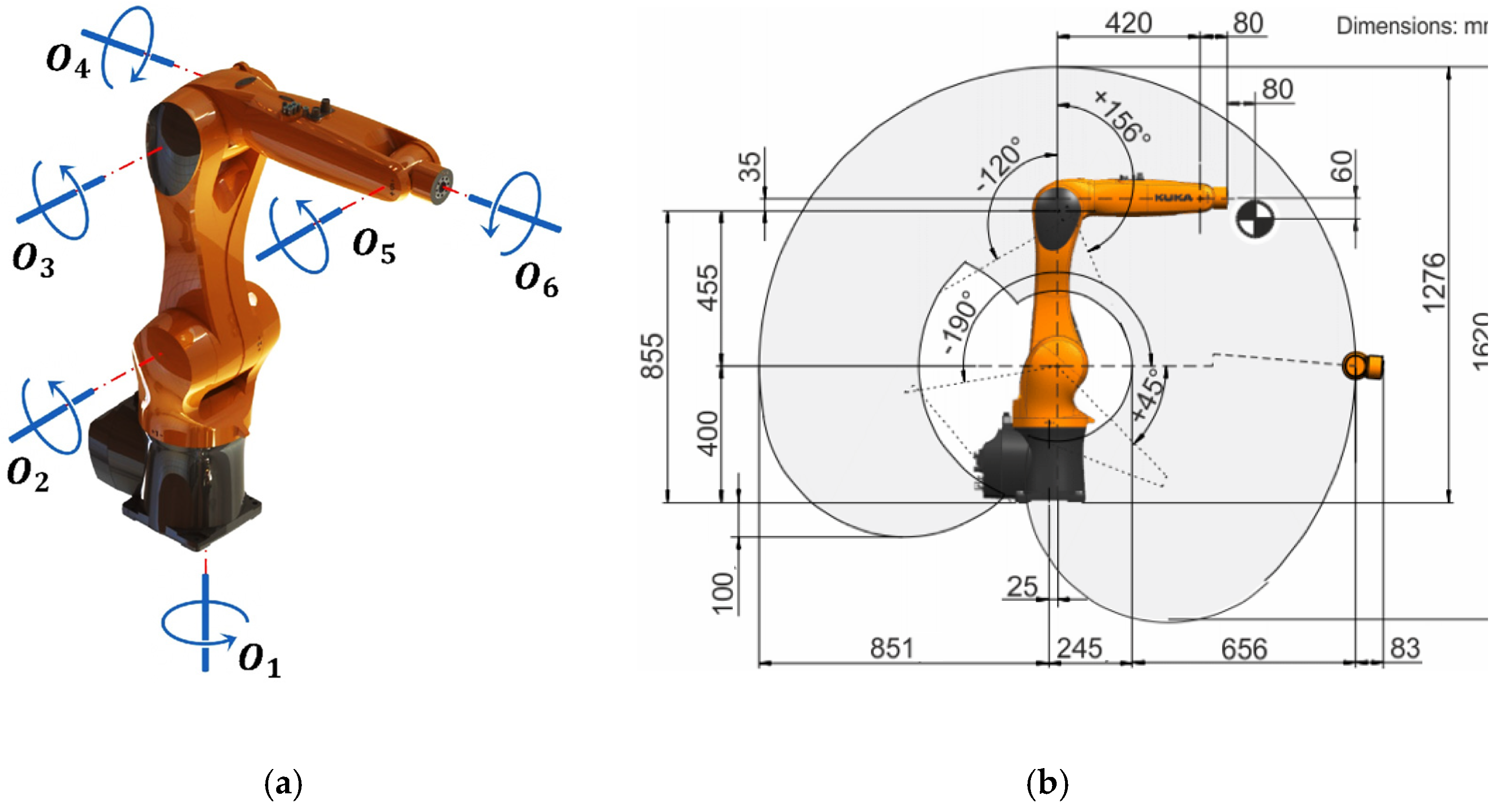
2.1. KUKA KR6 R900 Manipulator
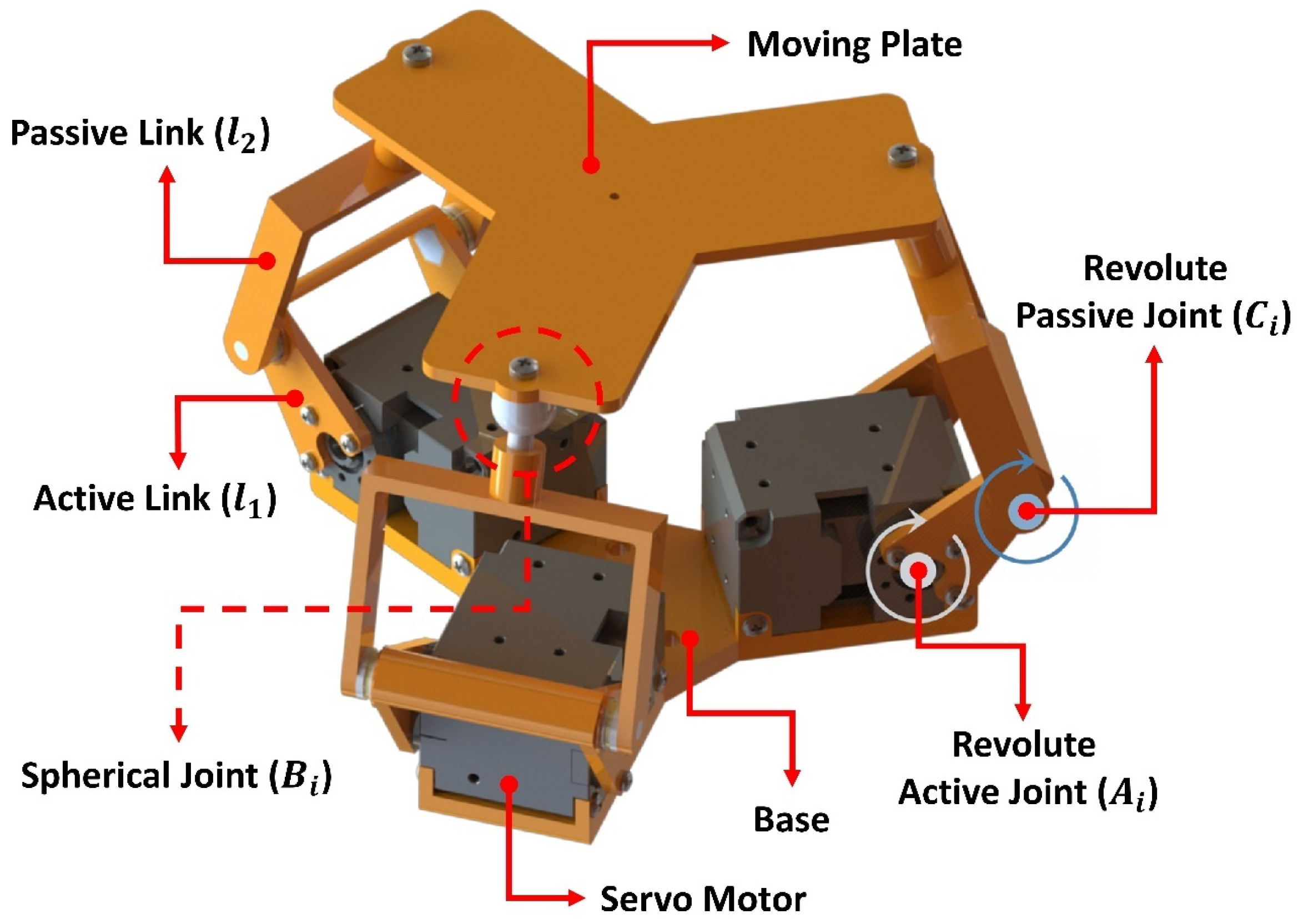
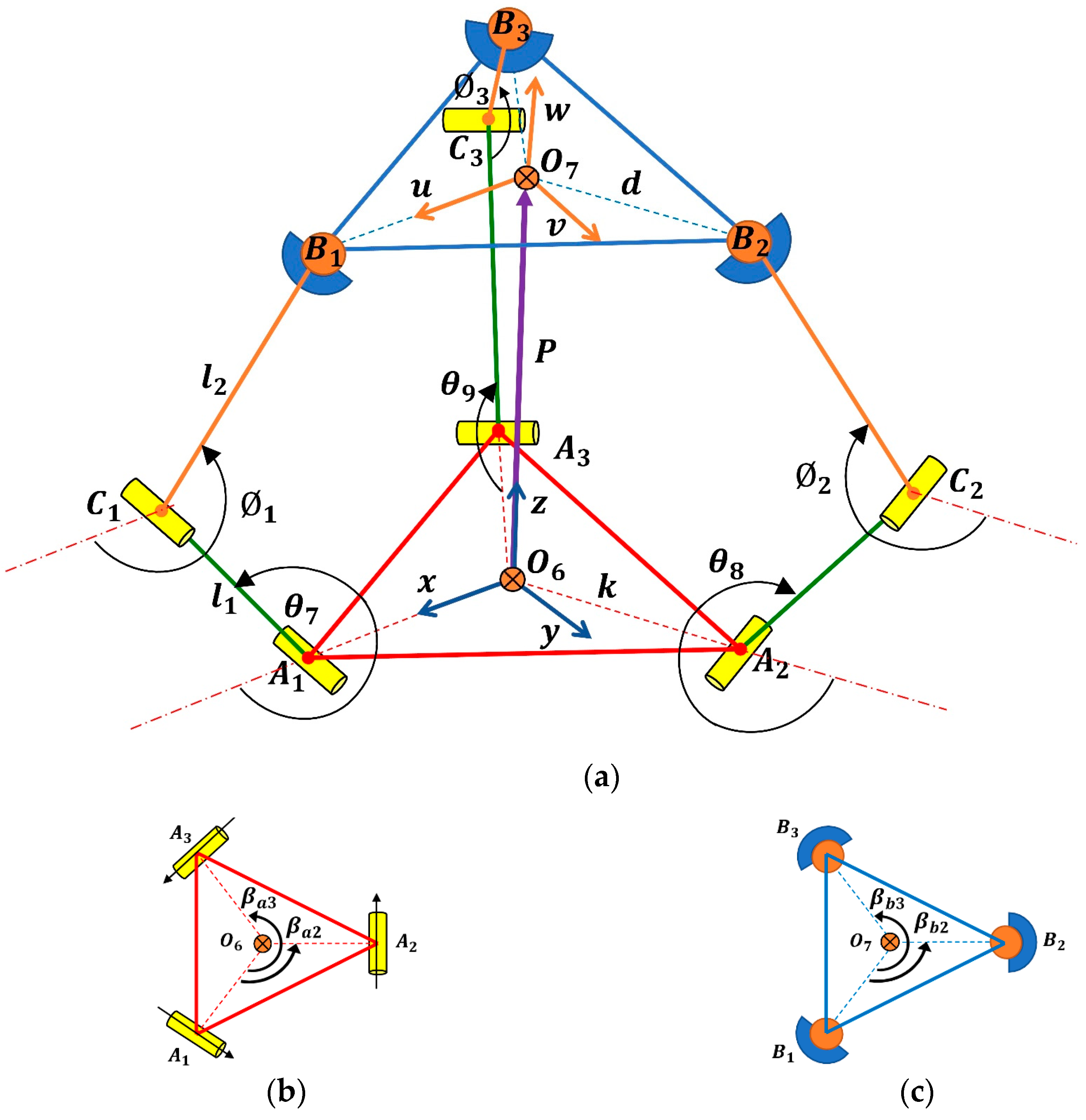
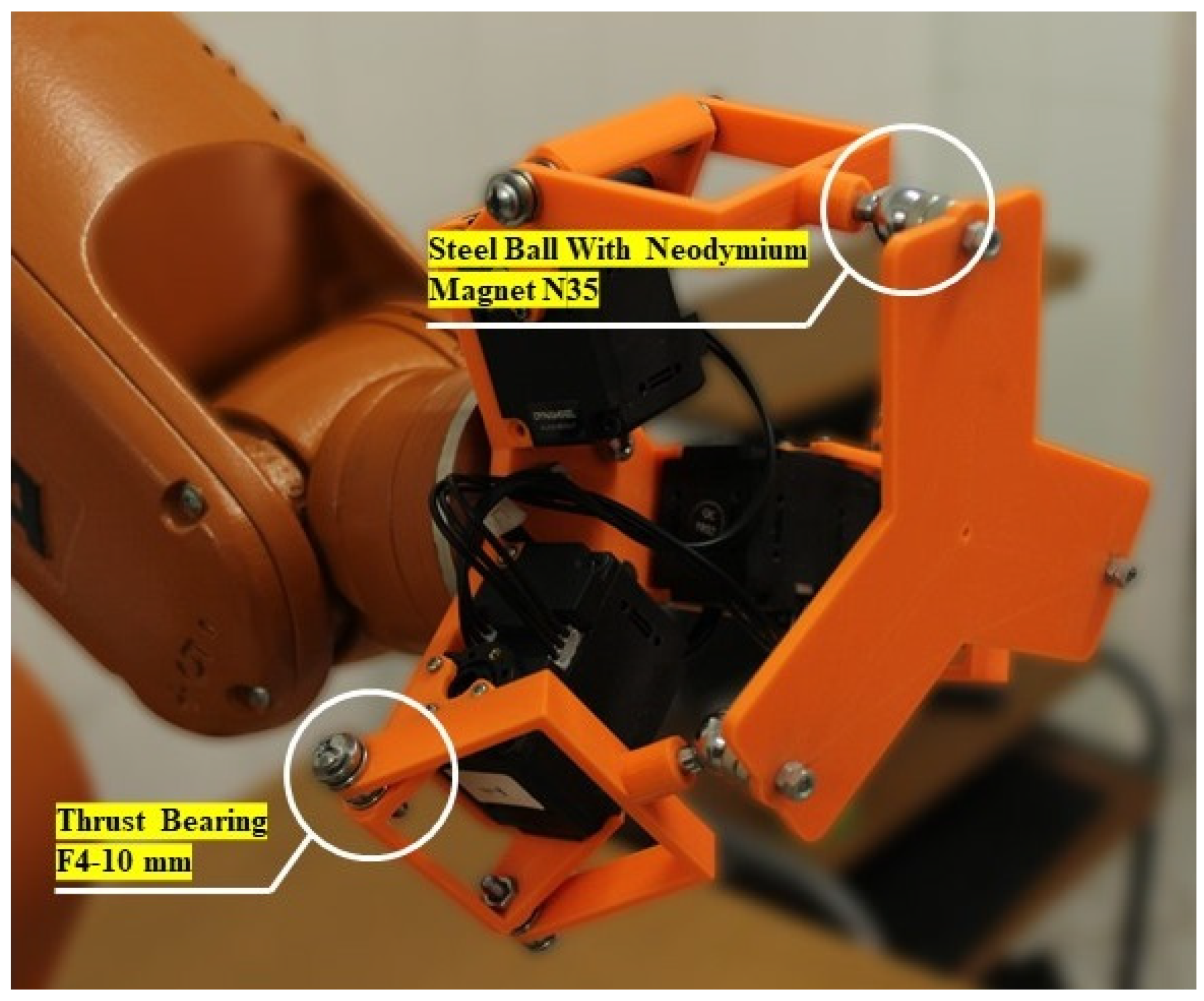
2.2. 3-RRS Parallel Manipulator
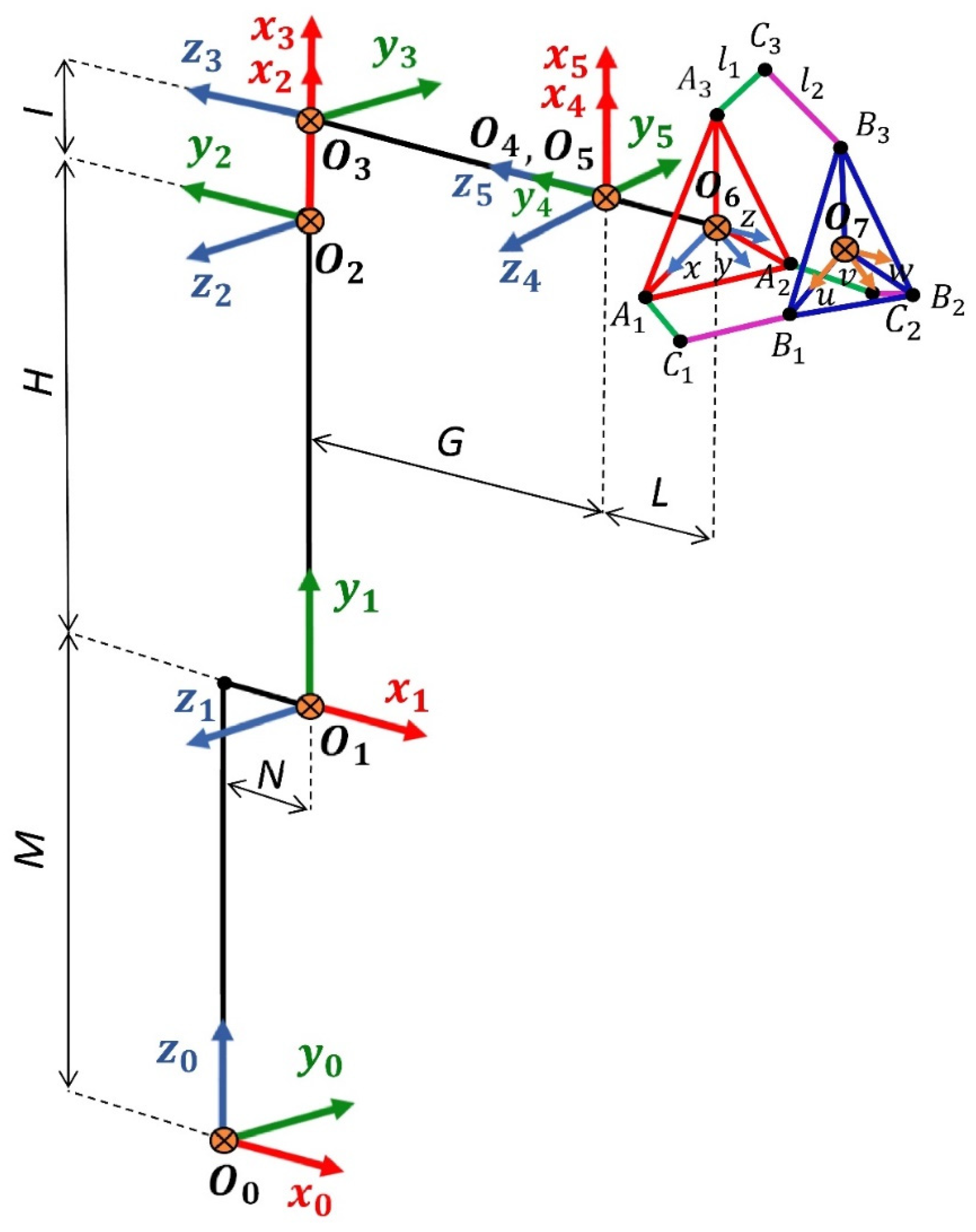
3. Kinematic Analysis
4. Modeling and Simulation
4.1. Numerical Model
4.2. Graphical Model
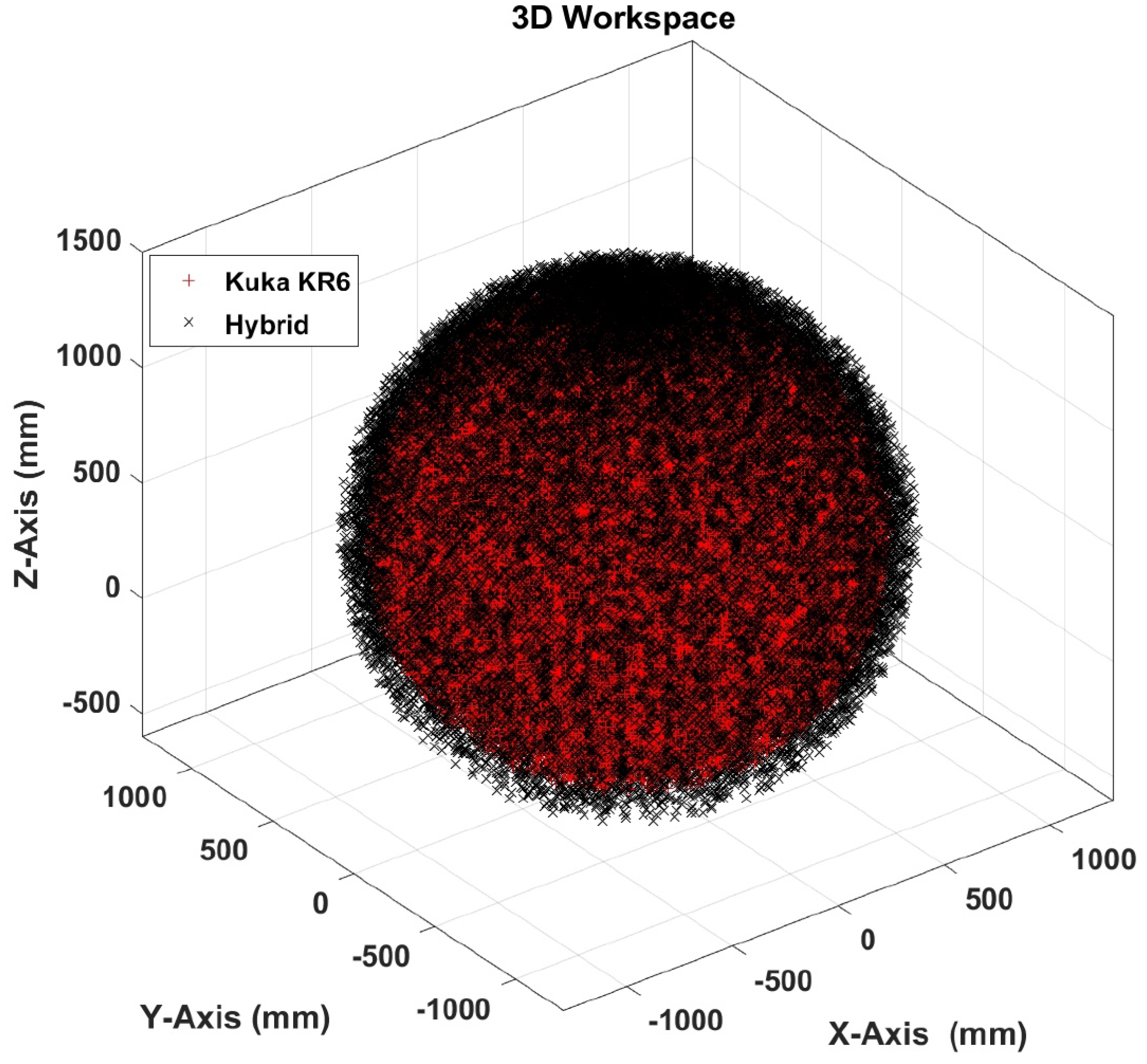
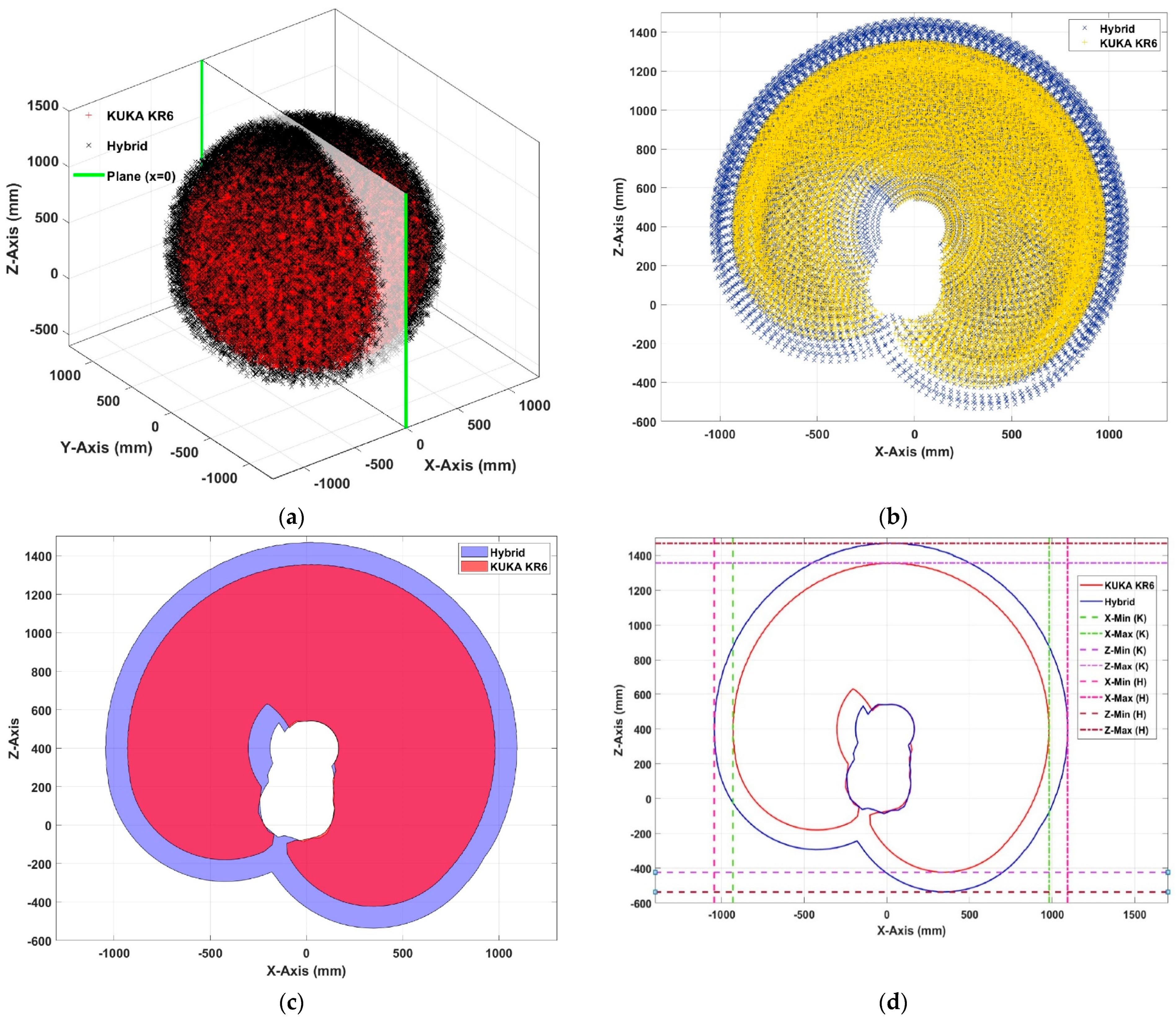
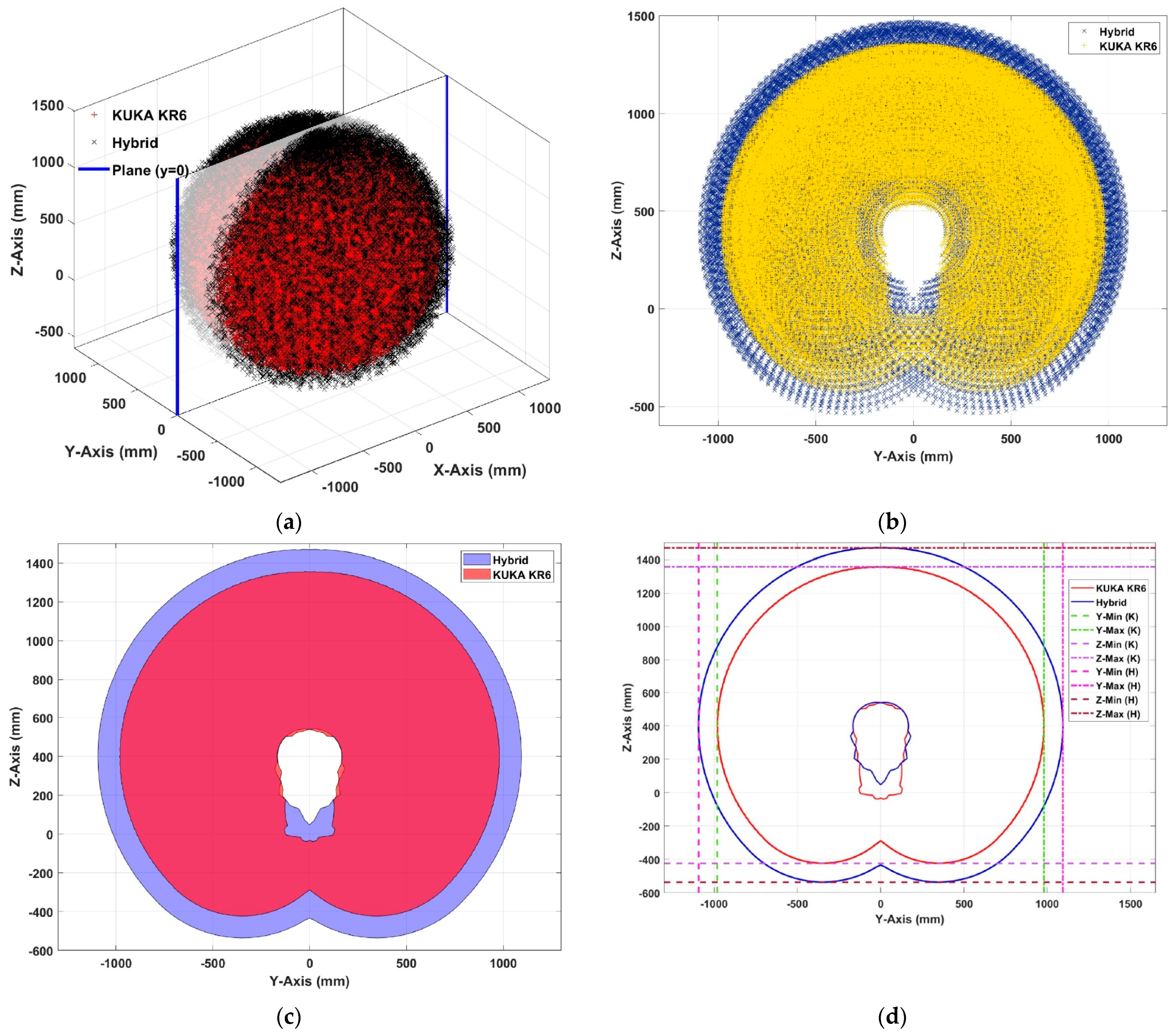
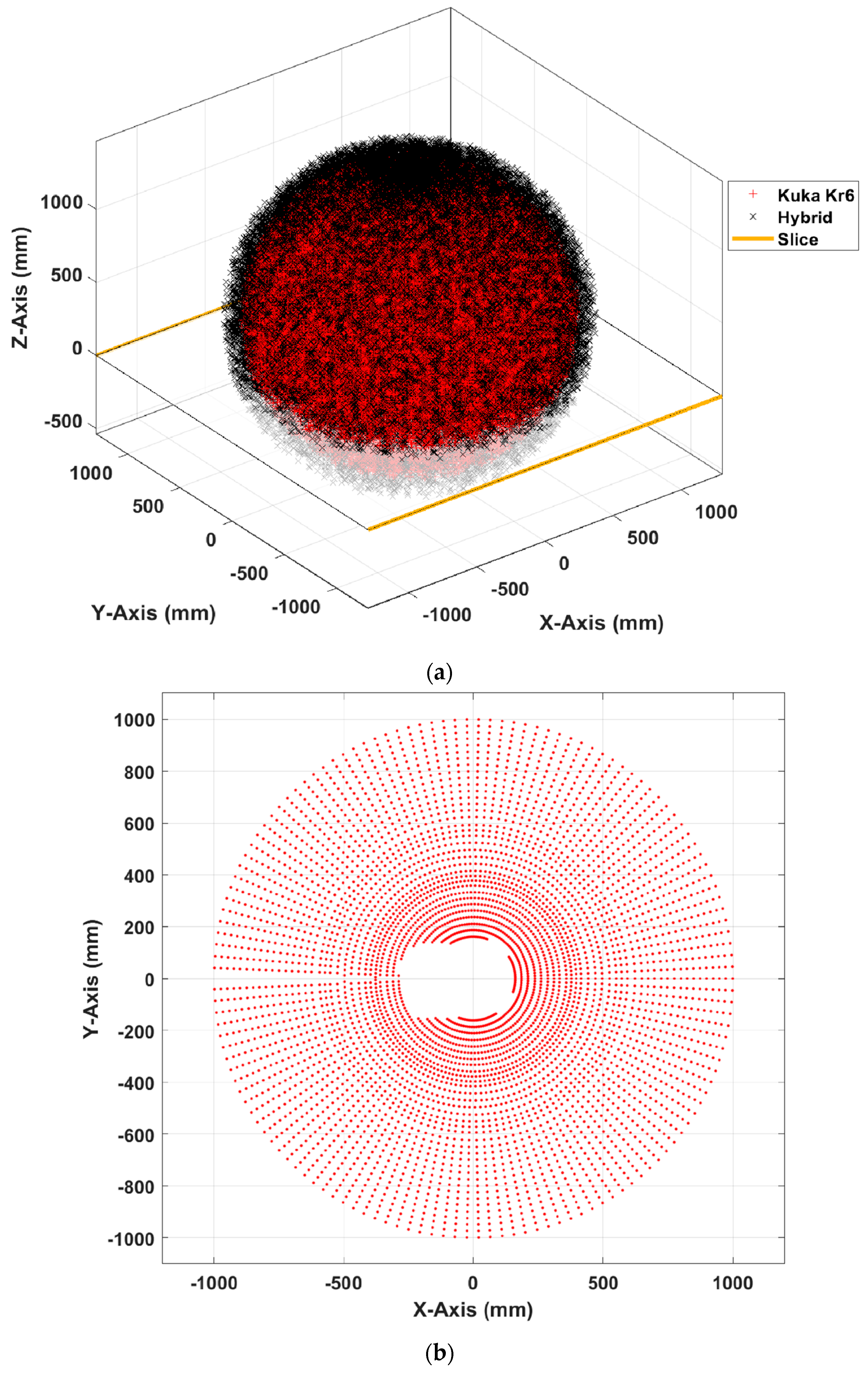
5. Workspace Analysis
6. Path Planning
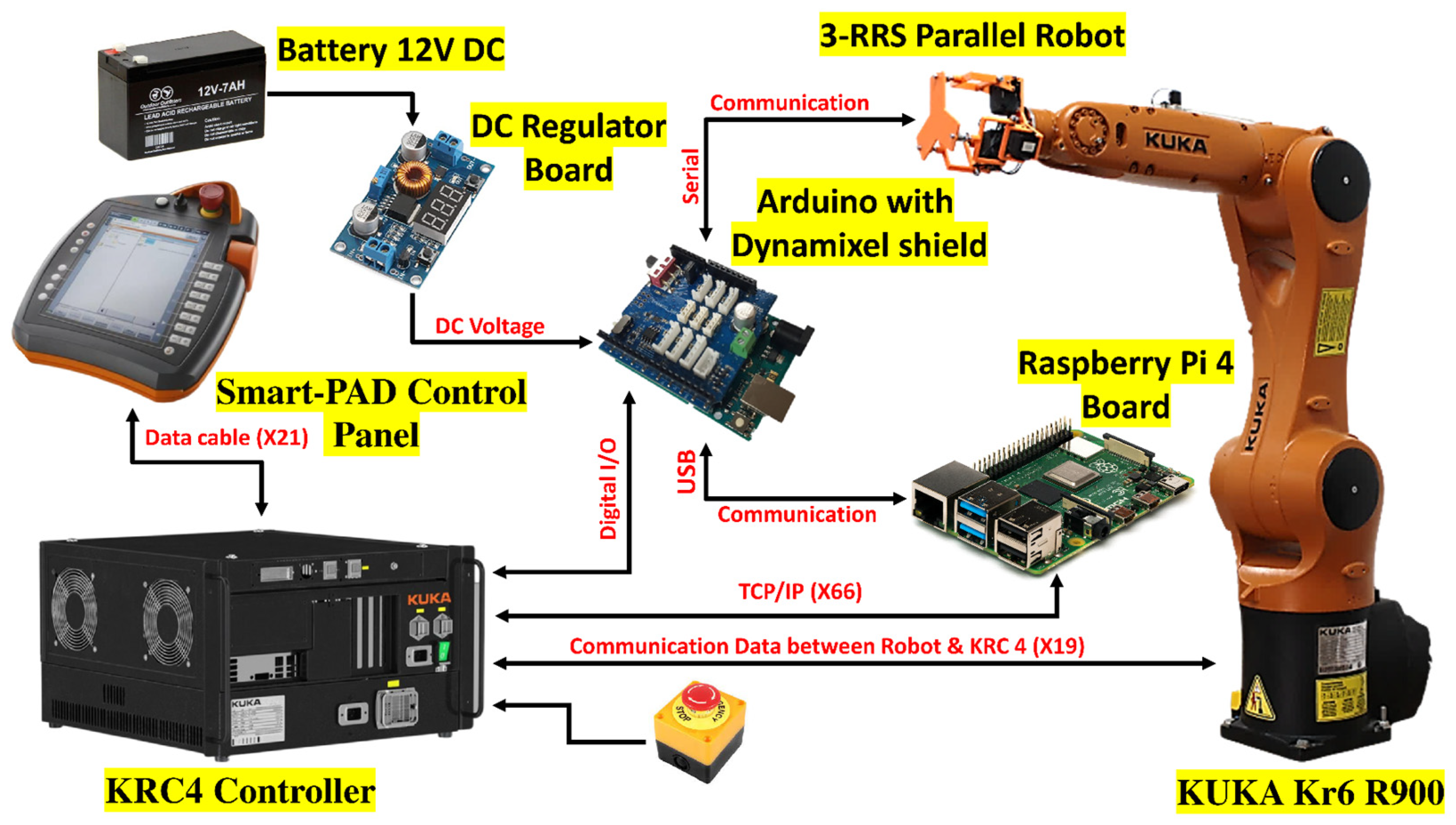
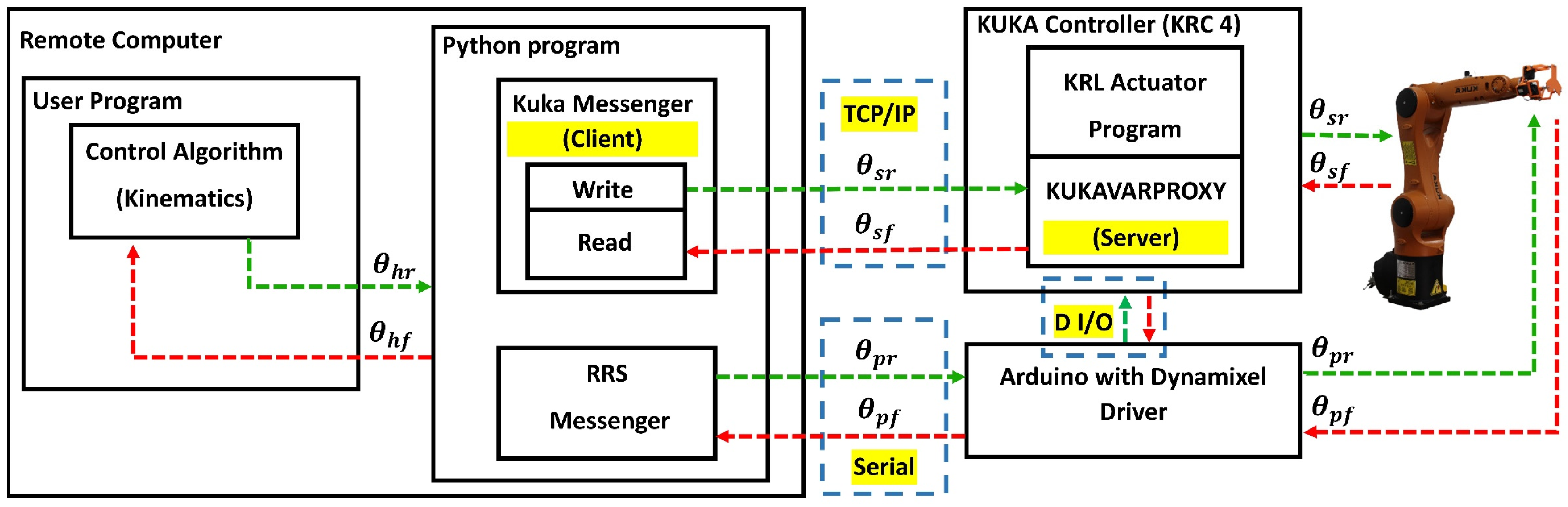
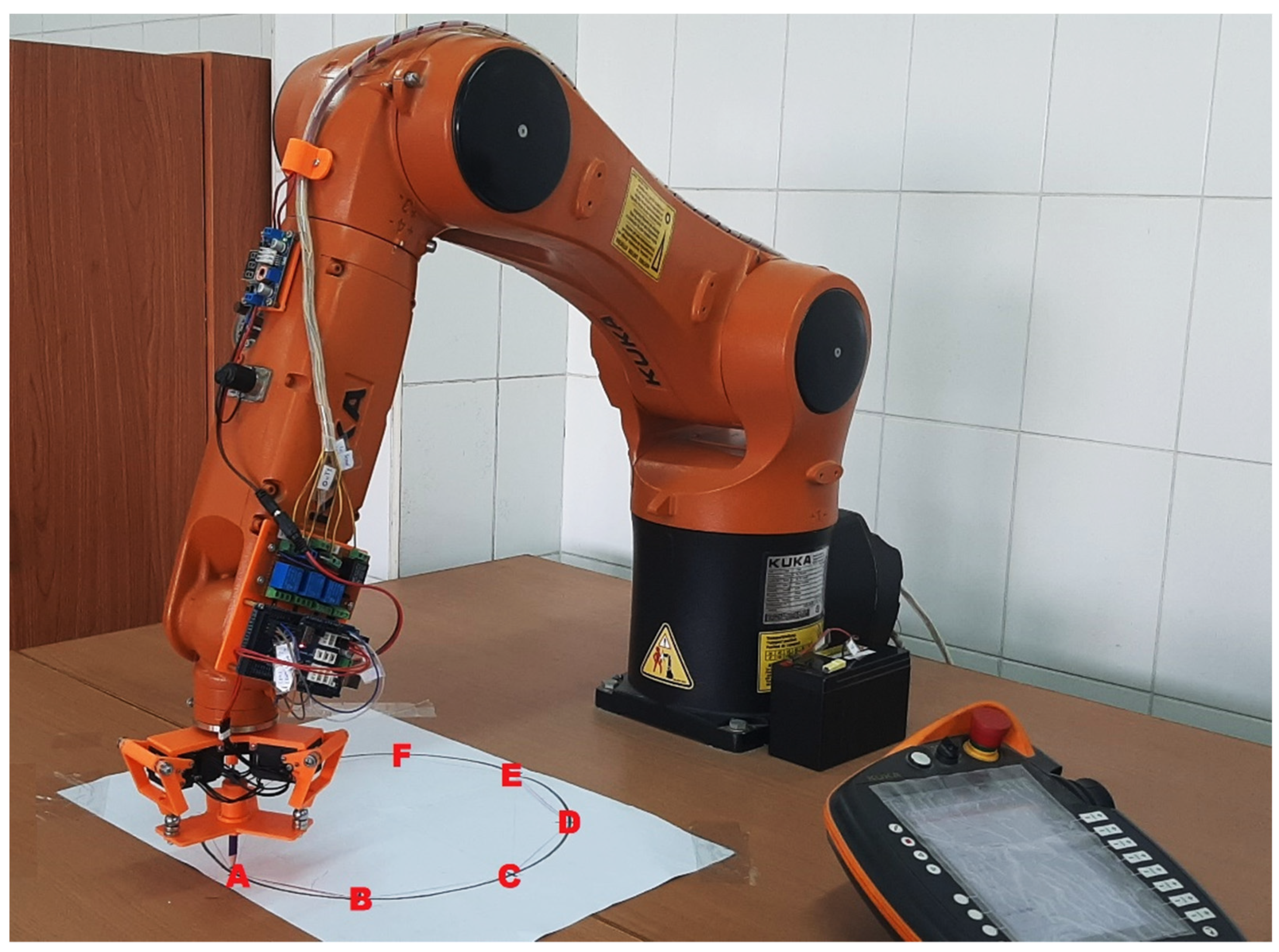
7. Experimental Setup and Testing
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tanev, T.K. Kinematics of a hybrid (parallel–serial) robot manipulator. Mech. Mach. Theory 2000, 35, 1183–1196. [Google Scholar] [CrossRef]
- Kumar, S.; Wöhrle, H.; de Gea Fernández, J.; Müller, A.; Kirchner, F. A survey on modularity and distributivity in series-parallel hybrid robots. Mechatronics 2020, 68, 102367. [Google Scholar] [CrossRef]
- Liu, K.; Xia, J.; Zhong, F.; Zhang, L. Structural parameters identification for industrial robot using a hybrid algorithm. Int. J. Adv. Robot. Syst. 2022, 19, 1–15. [Google Scholar] [CrossRef]
- Romdhane, L. Mechanism and Machine Theory. 1999. Available online: www.elsevier.com/locate/mechmt (accessed on 10 September 2022).
- Zheng, X.Z.; Bin, H.Z.; Luo, Y.G. Kinematic analysis of a hybrid serial-parallel manipulator. Int. J. Adv. Manuf. Technol. 2004, 23, 925–930. [Google Scholar] [CrossRef]
- Zeng, Q.; Fang, Y. Structural synthesis and analysis of serial-parallel hybrid mechanisms with spatial multi-loop kinematic chains. Mech. Mach. Theory 2012, 49, 198–215. [Google Scholar] [CrossRef]
- Zeng, Q.; Ehmann, K.F. Design of parallel hybrid-loop manipulators with kinematotropic property and deployability. Mech. Mach. Theory 2014, 71, 1–26. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Y.; Sun, P.; Luo, Y.; Chen, B.; Zhu, W. A multi-objective approach for the trajectory planning of a 7-DOF serial-parallel hybrid humanoid arm. Mech. Mach. Theory 2021, 165, 104423. [Google Scholar] [CrossRef]
- Dodampegama, S.K.; Konara, K.M.T.M.B.; Munasinghe, M.A.A.; Amarasinghe, Y.W.R. Design and analysis of hybrid robotic mechanisms using SCARA and RCM mechanisms. In Proceedings of the 2020 from Innovation to Impact (FITI), Colombo, Sri Lanka, 15 December 2020; Volume 1, pp. 1–5. [Google Scholar]
- Mejia-Rodriguez, R.; Villarreal-Cervantes, M.G.; Martínez-Castelán, J.N.; Muñoz-Reina, J.S.; Silva-García, V.M. Optimal dynamic balancing of a hybrid serial-parallel robotic manipulator through bio-inspired computing. J. King Saud Univ.-Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, Y.; Xie, B.; Zi, B. Dynamic Modeling and Error Analysis of a Cable-Linkage Serial-Parallel Palletizing Robot. IEEE Access 2021, 9, 2188–2200. [Google Scholar] [CrossRef]
- Shao, J.J.; Ma, T.; Chen, W.Y.; Fu, X. Position analysis of a hybrid serial-parallel manipulator in immersion lithography. Math. Probl. Eng. 2015, 2015, 573071. [Google Scholar] [CrossRef]
- Hu, B.; Zhao, J.; Cui, H. Terminal constraint and mobility analysis of serial-parallel manipulators formed by 3-RPS and 3-SPR PMs. Mech. Mach. Theory 2019, 134, 685–703. [Google Scholar] [CrossRef]
- Zhao, C.; Guo, H.; Liu, R.; Deng, Z.; Li, B.; Tian, J. Actuation distribution and workspace analysis of a novel 3(3RRlS) metamorphic serial-parallel manipulator for grasping space non-cooperative targets. Mech. Mach. Theory 2019, 139, 424–442. [Google Scholar] [CrossRef]
- Zhao, Y.; Mei, J.; Jin, Y.; Niu, W. A new hierarchical approach for the optimal design of a 5-dof hybrid serial-parallel kinematic machine. Mech. Mach. Theory 2021, 156, 104160. [Google Scholar] [CrossRef]
- Liu, R.; Yao, Y. A novel serial–parallel hybrid worm-like robot with multi-mode undulatory locomotion. Mech. Mach. Theory 2019, 137, 404–431. [Google Scholar] [CrossRef]
- He, J.; Li, J.; Sun, Z.; Gao, F.; Wu, Y.; Wang, Z. Kinematic design of a serial-parallel hybrid finger mechanism actuated by twisted-and-coiled polymer. Mech. Mach. Theory 2020, 152, 103951. [Google Scholar] [CrossRef]
- Yao, Y.; Wang, W.; Qiao, Y.; He, Z.; Liu, F.; Li, X.; Liu, X.; Zou, D.; Zhang, T. A novel series-parallel hybrid robot for climbing transmission tower. Ind. Rob. 2021, 48, 577–588. [Google Scholar] [CrossRef]
- Yang, G.; Chen, I.M.; Yeo, S.H.; Lin, W. Design and analysis of a modular hybrid parallel-serial manipulator for robotised deburring applications. Smart Devices Mach. Adv. Manuf. 2008, 167–188. [Google Scholar]
- Antonov, A.; Fomin, A.; Glazunov, V.; Kiselev, S.; Carbone, G. Inverse and forward kinematics and workspace analysis of a novel 5-DOF (3T2R) parallel–serial (hybrid) manipulator. Int. J. Adv. Robot. Syst. 2021, 18, 1–14. [Google Scholar] [CrossRef]
- Zhou, M.; Yu, Q.; Huang, K.; Mahov, S.; Eslami, A.; Maier, M.; Lohmann, C.P.; Navab, N.; Zapp, D.; Knoll, A.; et al. Towards Robotic-Assisted Subretinal Injection: A Hybrid Parallel-Serial Robot System Design and Preliminary Evaluation. IEEE Trans. Ind. Electron. 2020, 67, 6617–6628. [Google Scholar] [CrossRef]
- Laryushkin, P.; Antonov, A.; Fomin, A.; Essomba, T. Velocity and Singularity Analysis of a 5-DOF (3T2R) Parallel-Serial (Hybrid) Manipulator. Machines 2022, 10, 276. [Google Scholar] [CrossRef]
- Chu, A.M.; Nguyen, C.D.; Vu, M.H.; Duong, X.B.; Nguyen, T.A.; Le, C.H. Kinematic and dynamic modelling for a class of hybrid robots composed of m local closed-loop linkages appended to an n-link serial manipulator. Appl. Sci. 2020, 10, 2567. [Google Scholar] [CrossRef]
- Sun, P.; Li, Y.B.; Wang, Z.S.; Chen, K.; Chen, B.; Zeng, X.; Zhao, J.; Yue, Y. Inverse displacement analysis of a novel hybrid humanoid robotic arm. Mech. Mach. Theory 2020, 147, 103743. [Google Scholar] [CrossRef]
- Elsamanty, M.; Fanni, M.; Ramadan, A.; Abo-Ismail, A. Modeling and control of a novel Hybrid Ground Aerial Robot. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 1559–1565. [Google Scholar] [CrossRef]
- Tringali, A.; Cocuzza, S. Finite-horizon kinetic energy optimization of a redundant space manipulator. Appl. Sci. 2021, 11, 2346. [Google Scholar] [CrossRef]
- Elkholy, H.A.; Shahin, A.S.; Shaarawy, A.W.; Marzouk, H.; Elsamanty, M. Solving Inverse Kinematics of a 7-DOF Manipulator Using Convolutional Neural Network. In Proceedings of the International Conference on Artificial Intelligence and Computer Vision (AICV2020). AICV 2020, Cairo, Egypt, 8–9 April 2020; Hassanien, A.E., Azar, A., Gaber, T., Oliva, D., Tolba, F., Eds.; Advances in Intelligent Systems and Computing. Springer: Cham, Switzerland, 2020; Volume 1153. [Google Scholar] [CrossRef]
- Alphonse, A.A.; Abbas, A.A.; Fathy, A.M.; Elsayed, N.S.; Ammar, H.H.; Elsamanty, M.M. Modelling of Continuum Robotic Arm Using Artificial Neural Network (ANN). In Proceedings of the 2019 Novel Intelligent and Leading Emerging Sciences Conference (NILES), Giza, Egypt, 28–30 October 2019; pp. 191–195. [Google Scholar] [CrossRef]
- Elsamanty, M.; Faidallah, E.M.; Hossameldin, Y.H.; Abd Rabbo, S.M.; Maged, S.A. Design, simulation, and kinematics of 9-DOF Serial-Parallel Hybrid Manipulator Robot. In Proceedings of the 2021 3rd Novel Intelligent and Leading Emerging Sciences Conference (NILES), Giza, Egypt, 23–25 October 2021; pp. 370–375. [Google Scholar]
- Tsai, L. Robot analysis: The mechanics of serial and parallel manipulators. In The Mechanics of Serial and Parallel Manipulators; John Wiley & Sons: Hoboken, NJ, USA, 1999; p. 520. Available online: http://scholar.google.com/scholar?hl=en&btnG=Search&q=intitle:Robot+Analysis#2%5Cnhttp://books.google.com/books?hl=en&lr=&id=PK_N9aFZ3ccC&oi=fnd&pg=PR11&dq=Robot+Analysis:+The+Mechanics+of+Serial+and+Parallel+Manipulators&ots=acRJiEF57G&sig=MXyiO77O7H09ox (accessed on 15 June 2022).
- Thuruthel, T.G.; Falotico, E.; Cianchetti, M.; Laschi, C. ROMANSY 21—Robot Design, Dynamics and Control. In Proceedings of the 21st CISM-IFToMM Symposium, Udine, Italy, 20–23 June 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; Volume 569, pp. 47–54. [Google Scholar] [CrossRef]
- GmbH, K.R. KR AGILUS Sixx. 2014, pp. 1–89. Available online: http://www.wtech.com.tw/public/download/manual/kuka/KUKAKR610_AGILUS.pdf (accessed on 22 August 2022).
- Sanfilippo, F.; Hatledal, L.I.; Zhang, H.; Fago, M.; Pettersen, K.Y. Controlling Kuka Industrial Robots: Flexible Communication Interface JOpenShowVar. IEEE Robot. Autom. Mag. 2015, 22, 96–109. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint No. | Value ° |
|---|---|
| Joint 1 | ±170° |
| Joint 2 | |
| Joint 3 | |
| Joint 4 | |
| Joint 5 | |
| Joint 6 | |
| Joint 7 | 0 |
| Joint 8 | 0 |
| Joint 9 | 0 |
| Link Twist | Link Length | Joint Offset | ||
|---|---|---|---|---|
| 0-1 | 90 | -N | M | |
| 1-2 | 0 | -H | 0 | |
| 2-3 | −90 | -I | 0 | |
| 3-4 | 90 | 0 | -G | |
| 4-5 | −90 | 0 | 0 | |
| 5-6 | 180 | 0 | -L |
| XMin (mm) | XMax (mm) | ZMin (mm) | ZMax (mm) | |
|---|---|---|---|---|
| KUKA | −931.2 | 981.2 | −422.9 | 1356 |
| HYBRID | −1044 | 1094 | −536 | 1469 |
| YMin (mm) | YMax (mm) | ZMin (mm) | ZMax (mm) | |
|---|---|---|---|---|
| KUKA | −981.2 | 981.2 | −422.9 | 1356 |
| HYBRID | −1094 | 1094 | −536 | 1469 |
| Point | mm | mm | mm | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 0.08 | −23.78 | 93.75 | 0 | 18.86 | −0.03 | 120 | 120 | 120 | 623.563 | 0.0049 | 0 | 179.88 | 1.17 | 180 |
| B | −10.23 | −26.26 | 98.28 | 0.02 | 19.15 | −0.03 | 90 | 90 | 90 | 583.523 | 107.628 | 0 | −169.78 | −1.17 | −180 |
| C | −18.62 | −32.10 | 114.85 | 0.02 | 8.59 | −0.03 | 60 | 60 | 60 | 470.077 | 159.941 | 0 | −161.39 | −1.34 | −180 |
| D | −17.94 | −34.85 | 133.23 | 0.03 | −9.15 | −0.03 | 30 | 30 | 30 | 358.786 | 117.551 | 0 | −162.06 | 0.77 | 180 |
| E | 0.08 | −33.47 | 143.07 | 0.03 | −22.52 | −0.03 | 0 | 0 | 0 | 310.334 | 0.0043 | 0 | 179.41 | 2.92 | 180 |
| F | 17.94 | −34.85 | 133.23 | 0.03 | −9.15 | −0.03 | 30 | 30 | 30 | 358.789 | −117.54 | 0 | 162.42 | 0.99 | 180 |
| G | 18.62 | −32.10 | 114.85 | 0.02 | 8.59 | −0.03 | 60 | 60 | 60 | 470.08 | −159.93 | 0 | 161.66 | −1.08 | −180 |
| H | 10.23 | −26.26 | 98.28 | 0 | 19.15 | −0.03 | 90 | 90 | 90 | 583.525 | −107.61 | 0 | 168.87 | 0.73 | −180 |
| Point | x (mm) | y (mm) | z (mm) | |||
|---|---|---|---|---|---|---|
| A | 623.563 | 0.0049 | 0 | 179.88 | 1.17 | 180 |
| B | 583.523 | 107.628 | 0 | −169.78 | −1.17 | −180 |
| C | 470.077 | 159.941 | 0 | −161.39 | −1.34 | −180 |
| D | 358.786 | 117.551 | 0 | −162.06 | 0.77 | 180 |
| E | 310.334 | 0.0043 | 0 | 179.41 | 2.92 | 180 |
| F | 358.789 | −117.54 | 0 | 162.42 | 0.99 | 180 |
| G | 470.08 | −159.93 | 0 | 161.66 | −1.08 | −180 |
| H | 583.525 | −107.61 | 0 | 168.87 | 0.73 | −180 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elsamanty, M.; Faidallah, E.M.; Hossameldin, Y.H.; Rabbo, S.A.; Maged, S.A.; Yang, H.; Guo, K. Workspace Analysis and Path Planning of a Novel Robot Configuration with a 9-DOF Serial-Parallel Hybrid Manipulator (SPHM). Appl. Sci. 2023, 13, 2088. https://doi.org/10.3390/app13042088
Elsamanty M, Faidallah EM, Hossameldin YH, Rabbo SA, Maged SA, Yang H, Guo K. Workspace Analysis and Path Planning of a Novel Robot Configuration with a 9-DOF Serial-Parallel Hybrid Manipulator (SPHM). Applied Sciences. 2023; 13(4):2088. https://doi.org/10.3390/app13042088
Chicago/Turabian StyleElsamanty, Mahmoud, Ehab M. Faidallah, Yehia H. Hossameldin, Saber Abd Rabbo, Shady A. Maged, Hongbo Yang, and Kai Guo. 2023. "Workspace Analysis and Path Planning of a Novel Robot Configuration with a 9-DOF Serial-Parallel Hybrid Manipulator (SPHM)" Applied Sciences 13, no. 4: 2088. https://doi.org/10.3390/app13042088
APA StyleElsamanty, M., Faidallah, E. M., Hossameldin, Y. H., Rabbo, S. A., Maged, S. A., Yang, H., & Guo, K. (2023). Workspace Analysis and Path Planning of a Novel Robot Configuration with a 9-DOF Serial-Parallel Hybrid Manipulator (SPHM). Applied Sciences, 13(4), 2088. https://doi.org/10.3390/app13042088