
Correlation between Postural Stability and Lower Extremity Joint Reaction Forces in Young Adults during Incline and Decline Walking
 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
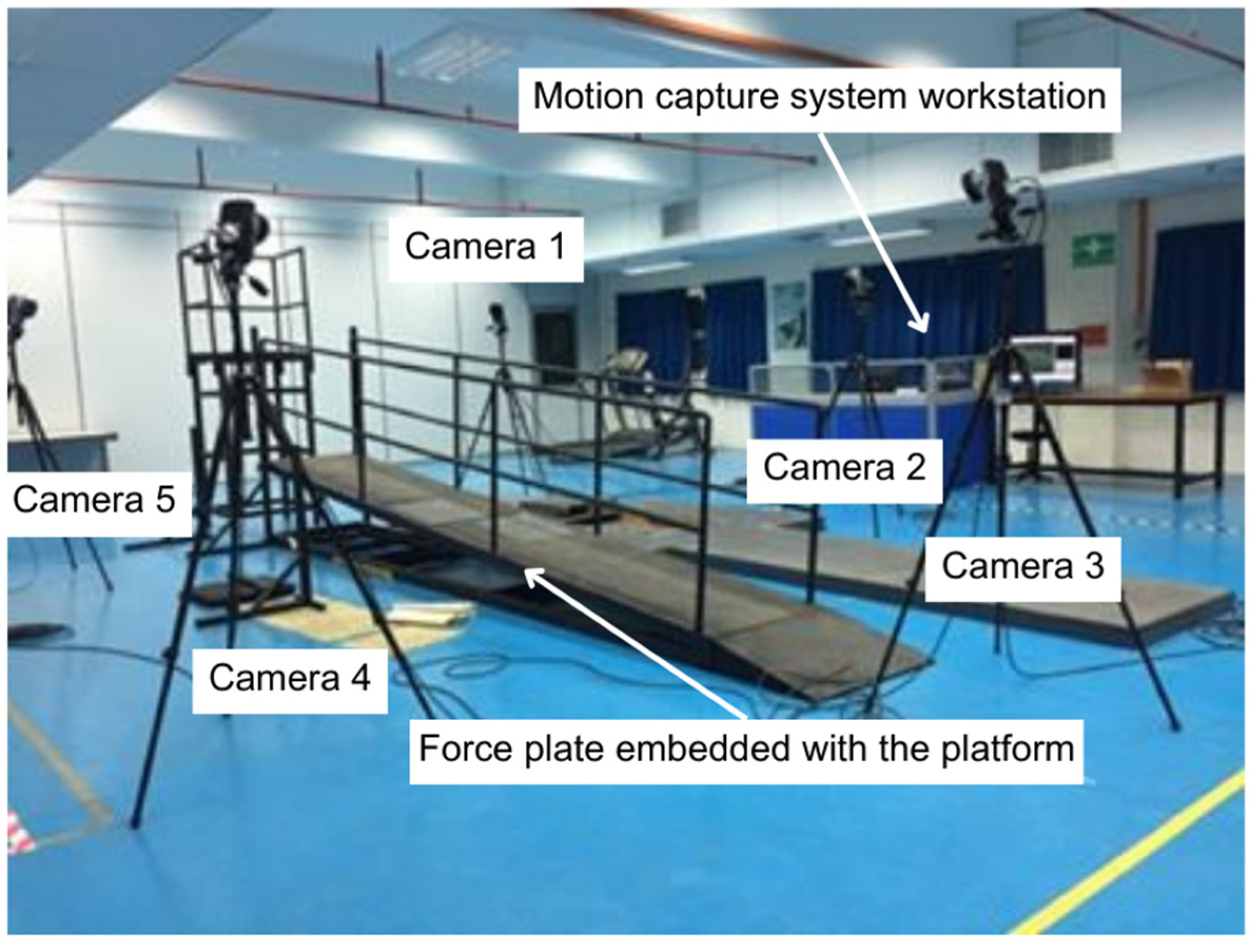
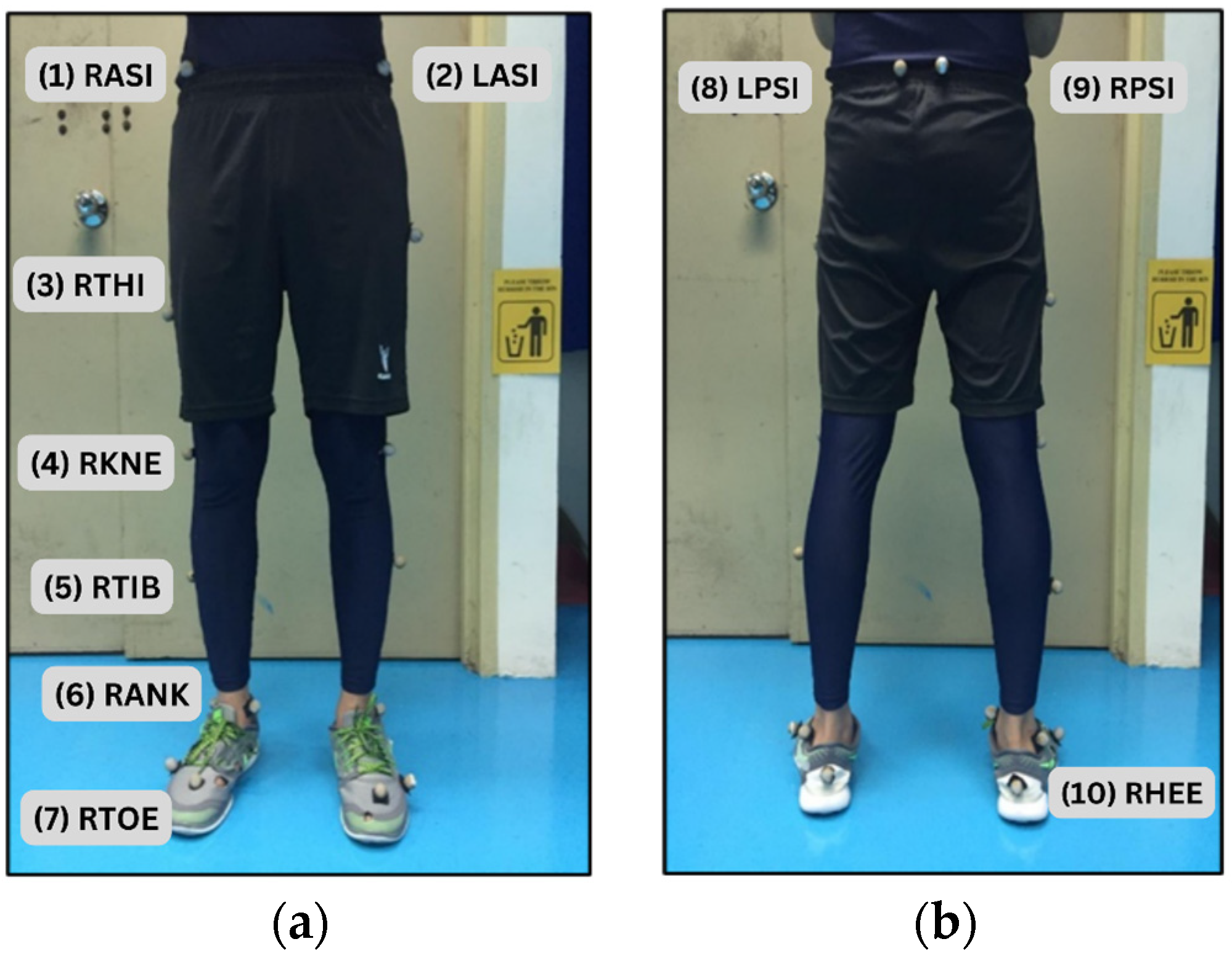
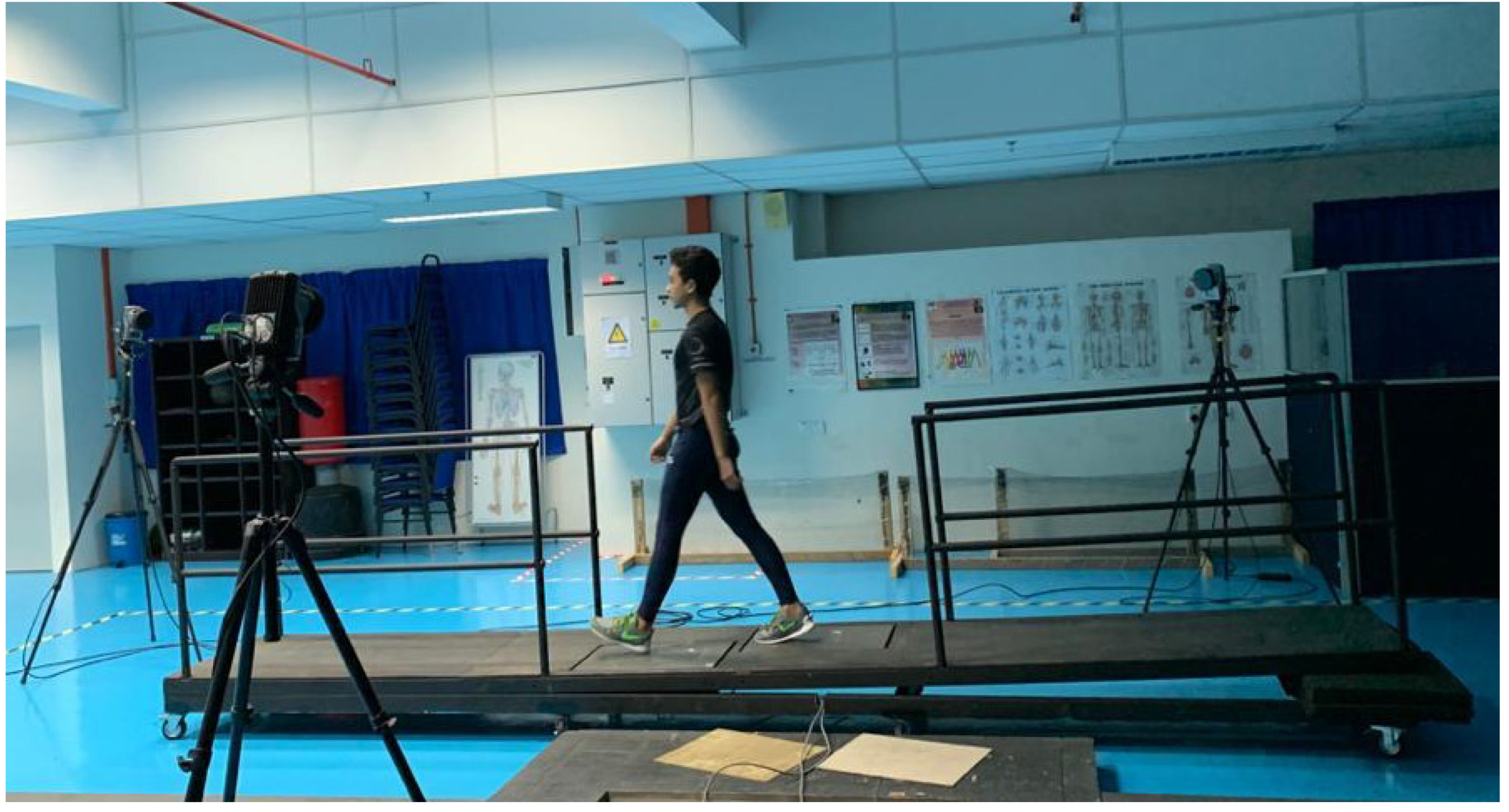
2.1. Experimental Protocol
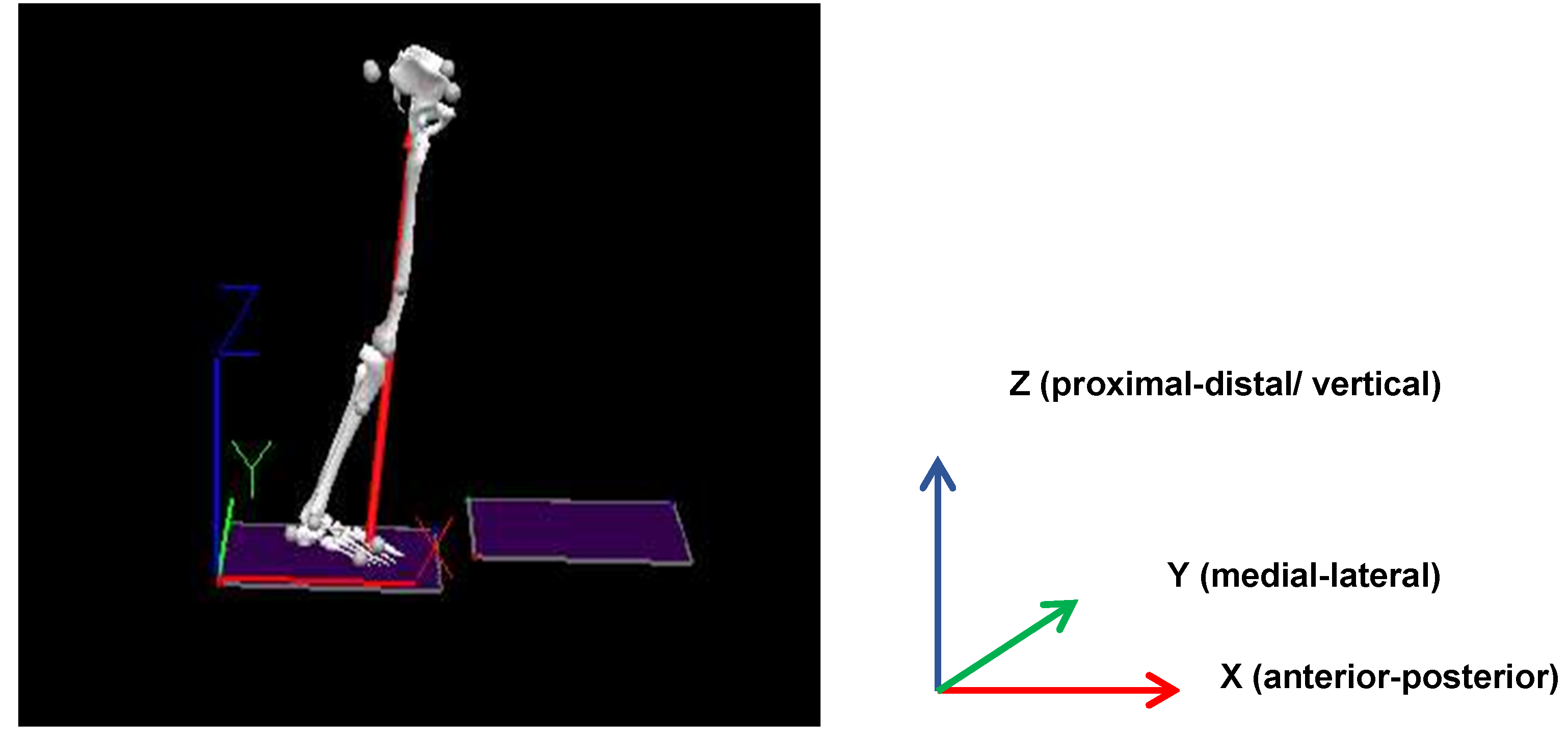
2.2. Measured Parameters
2.2.1. Required Coefficient of Friction (RCOF)
2.2.2. Postural Stability Index (PSI)
2.2.3. Center of Pressure–Center of Mass (COP-COM) Distance
2.3. Statistical Analysis
3. Results
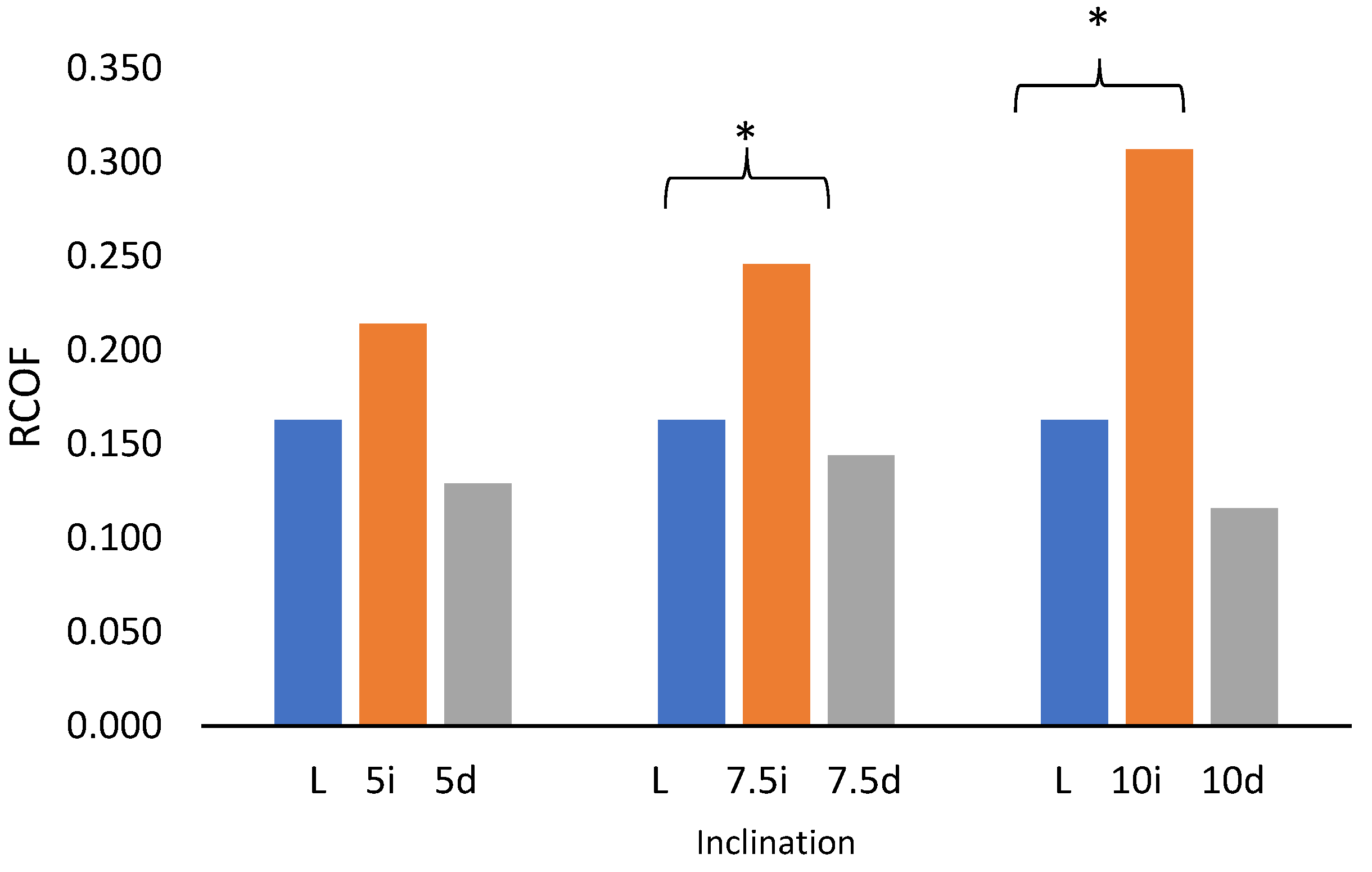
3.1. RCOF during Level and Slope Walking
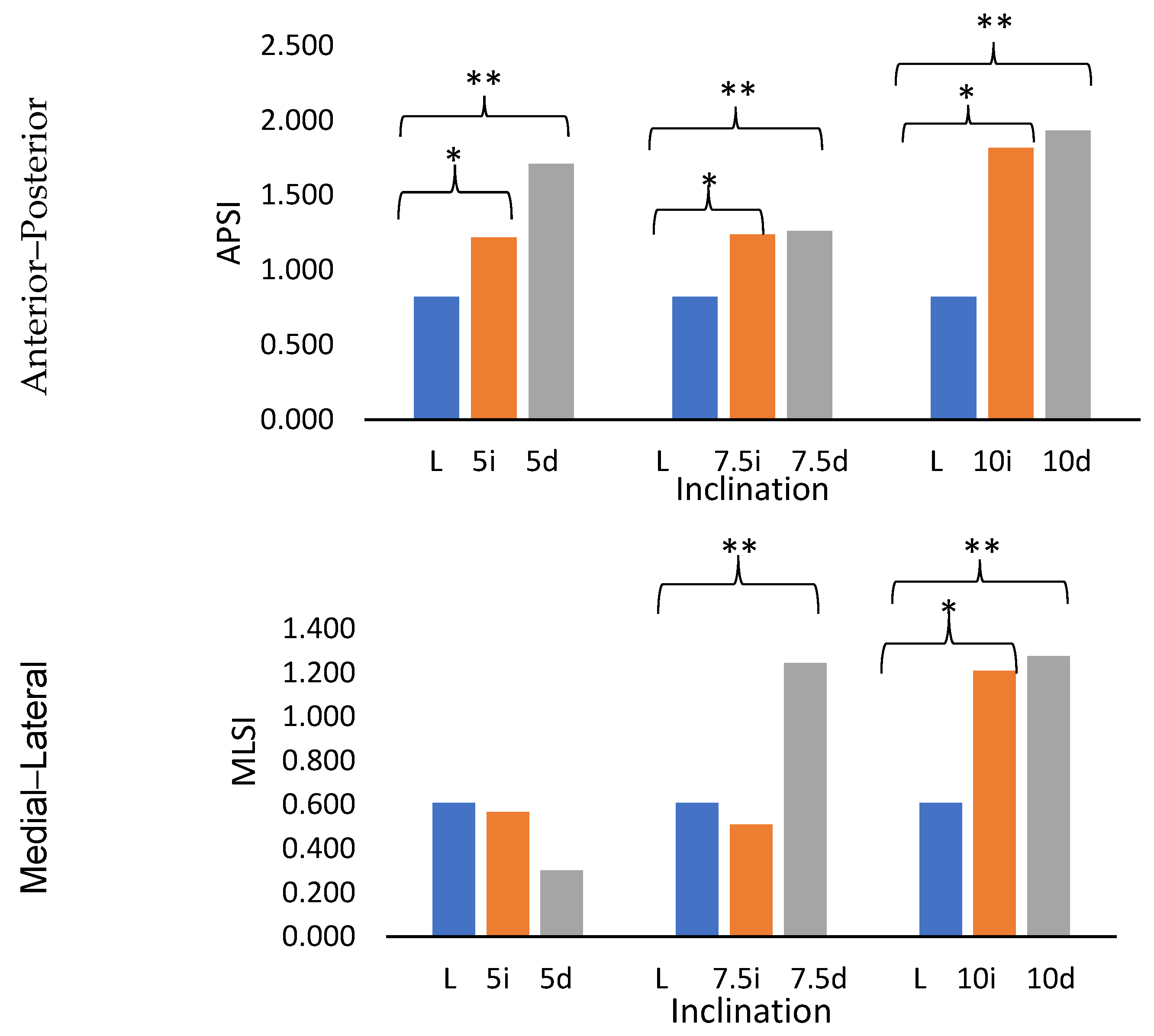
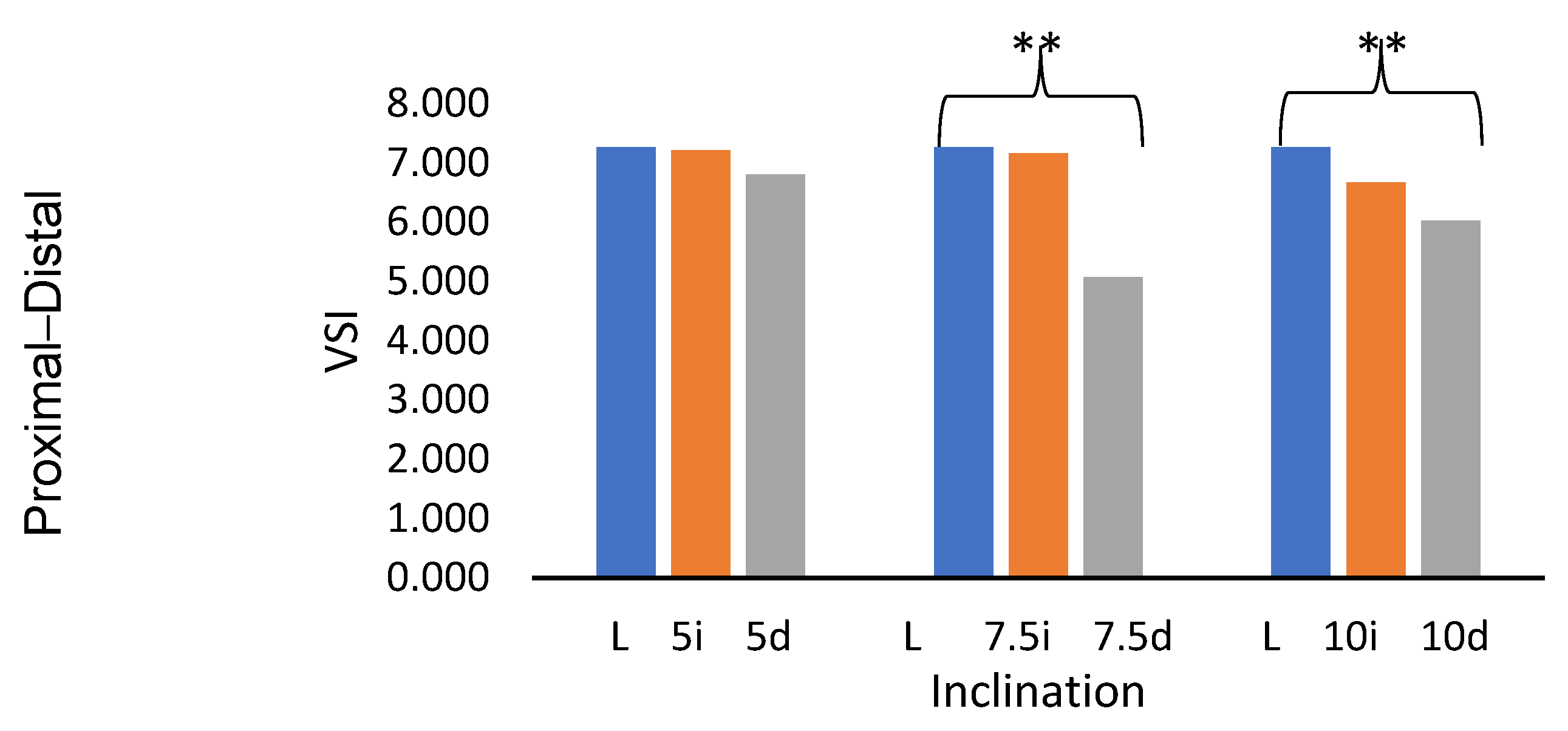
3.2. Postural Stability Index during Level and Slope Walking
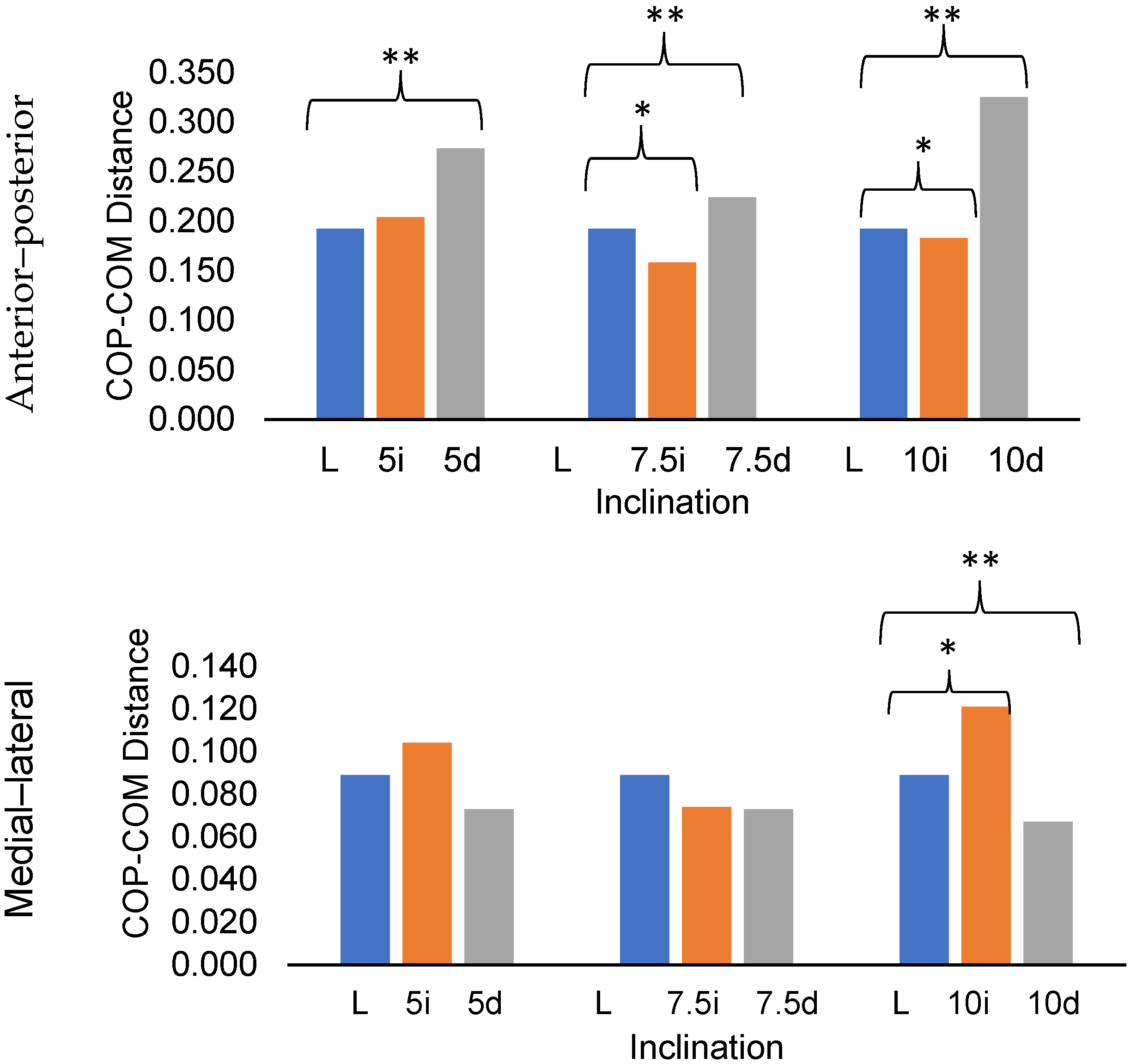
3.3. COP-COM Distance during Level and Slope Walking
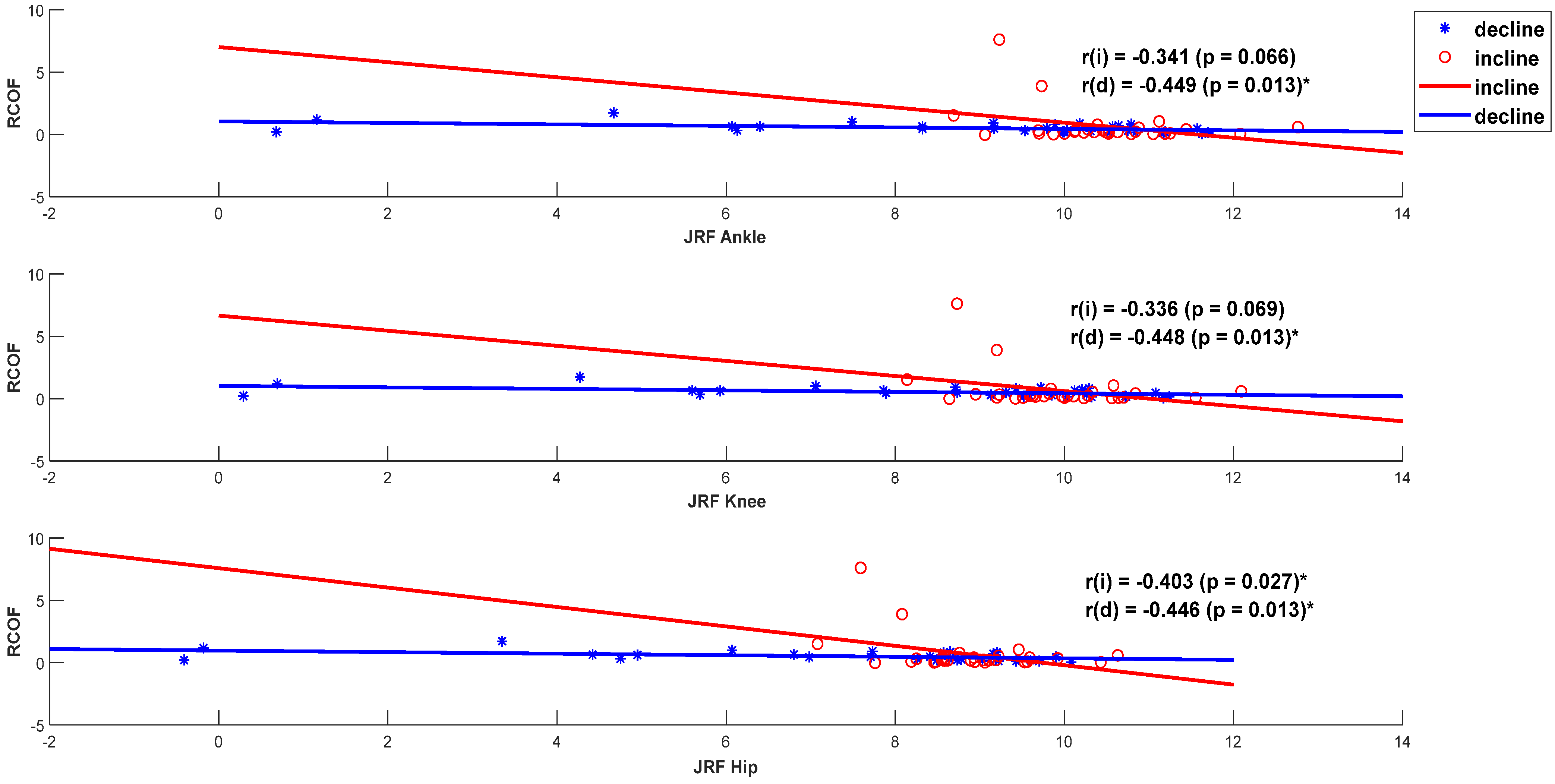
3.4. Relationship between the RCOF (Initial Foot Contact) and the JRF during Slope Walking
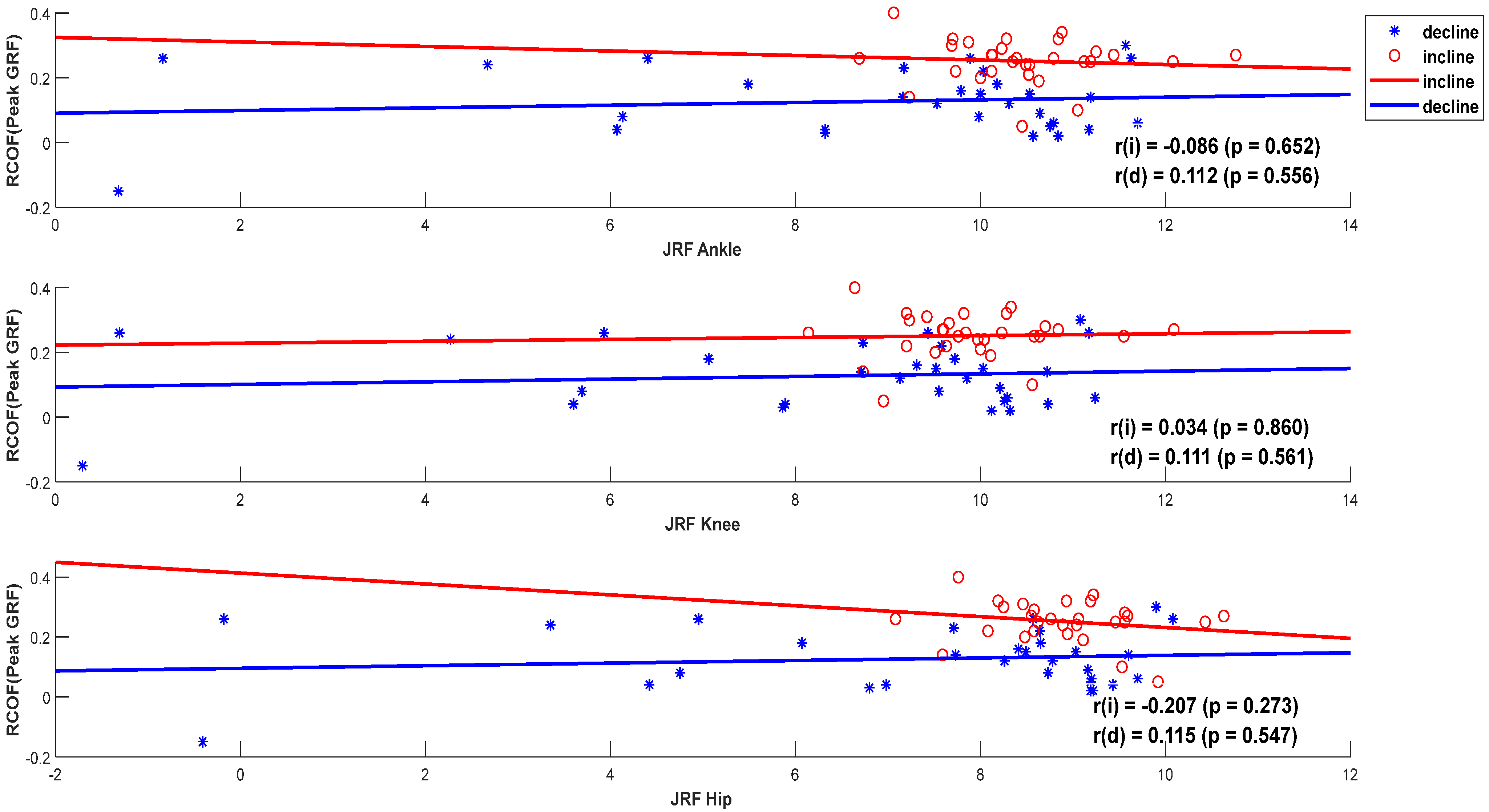
3.5. Relationship between the RCOF (Peak GRF) and the JRF during Inclined and Declined Walking
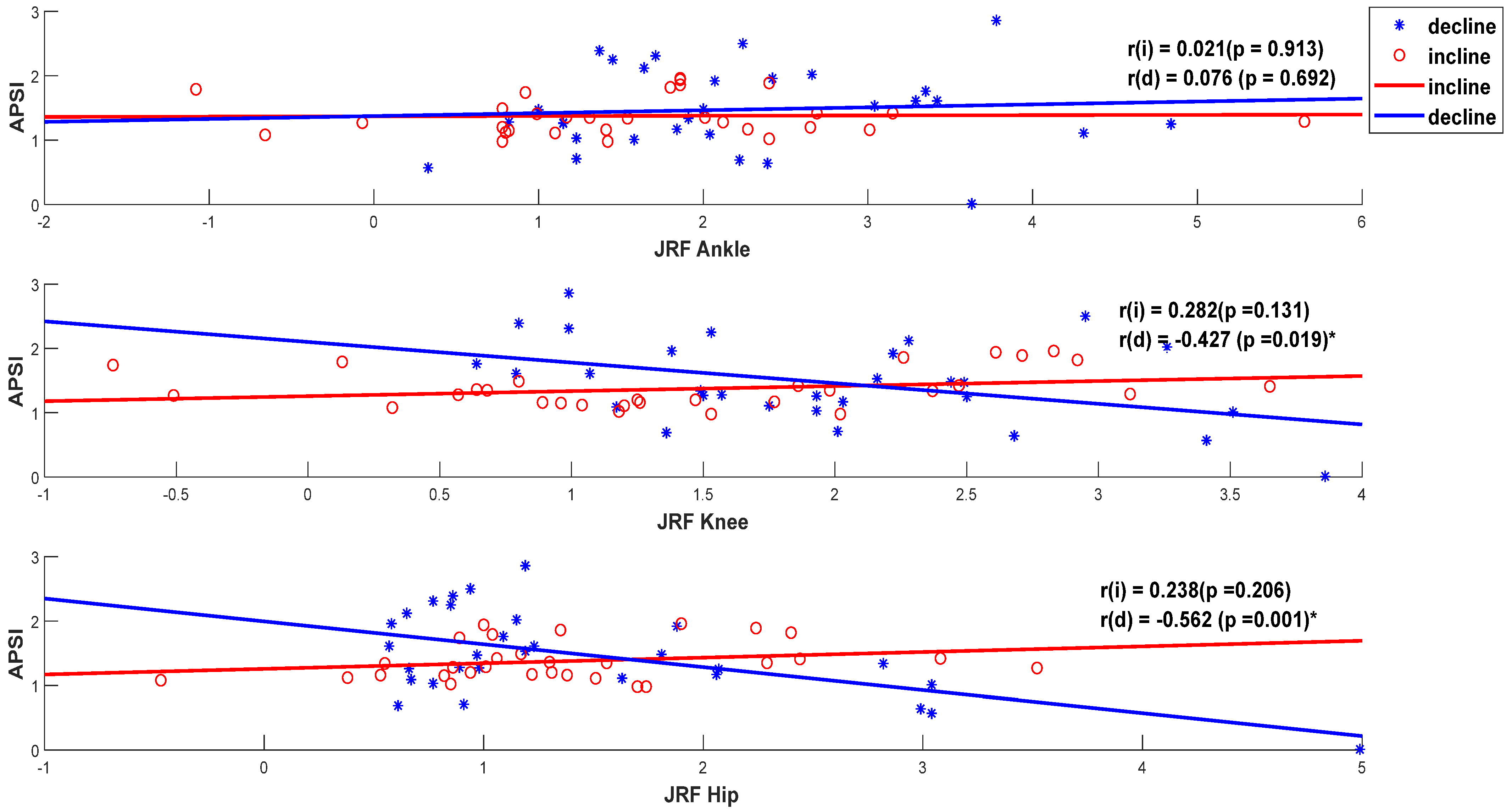
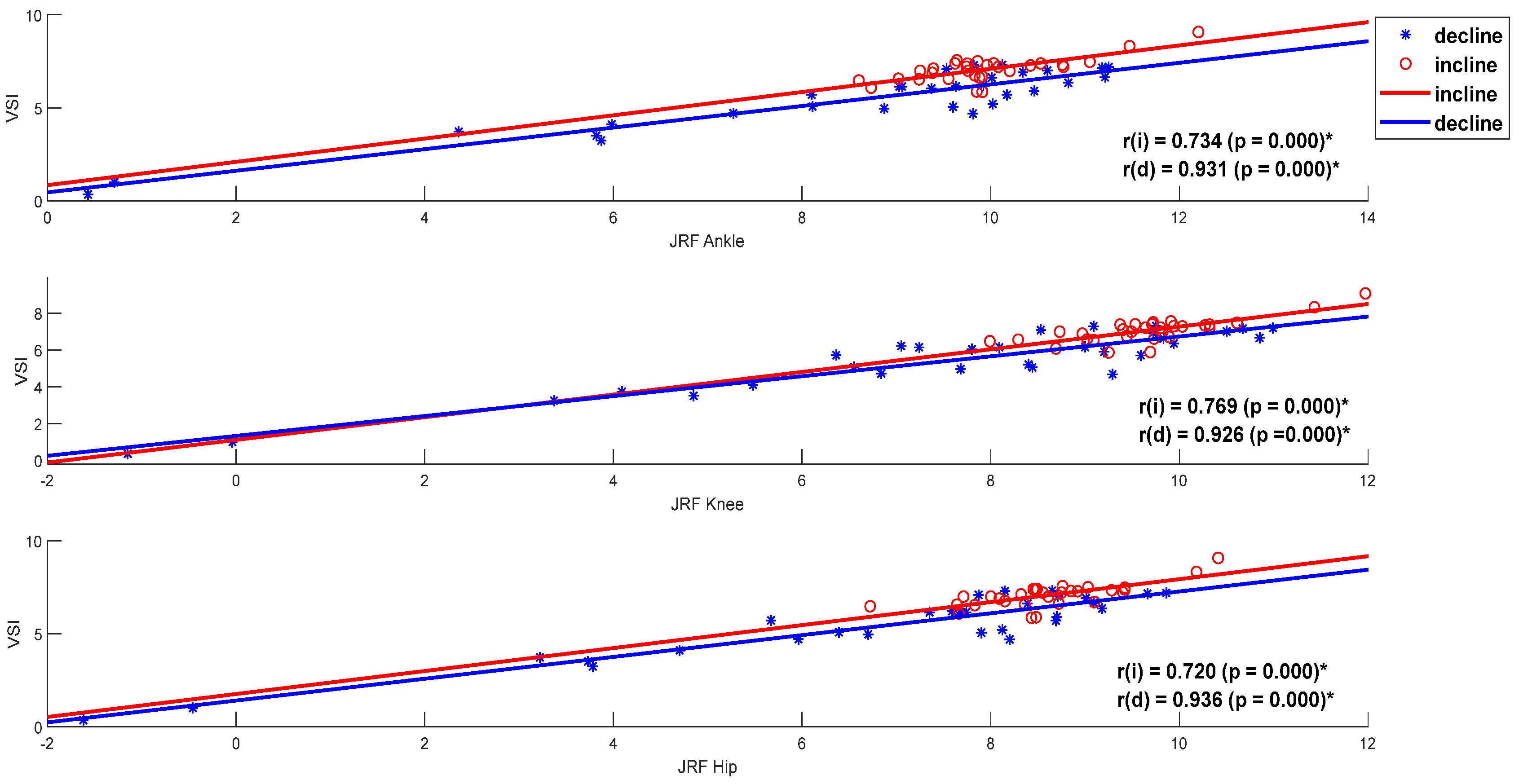
3.6. Relationship between the PSI and JRF during Inclined and Declined Walking
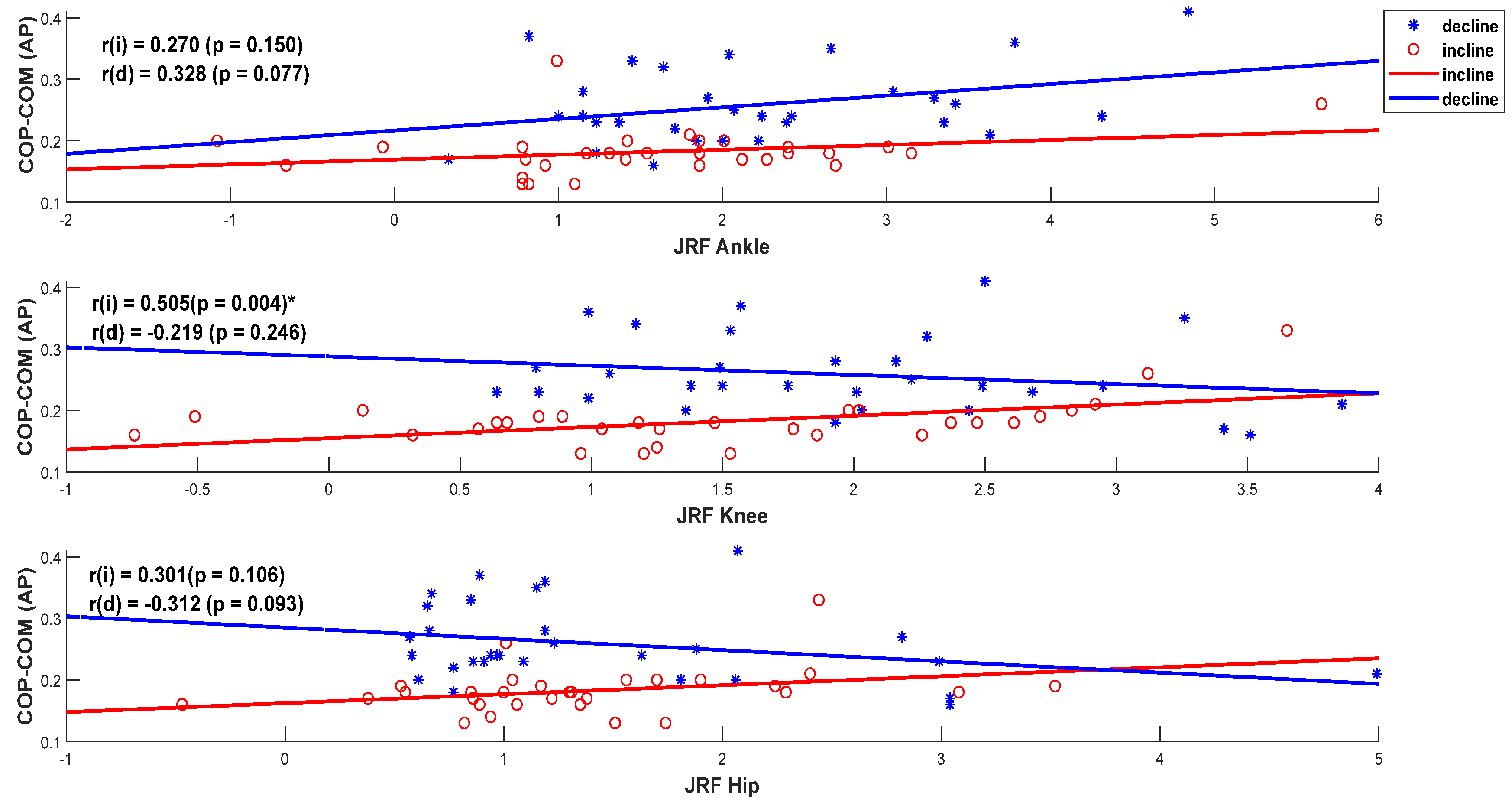
3.7. Relationship between the COP-COM Distance and JRF during Slope Walking
4. Discussions
4.1. The Relationship between the RCOF and JRF of the Lower Extremity during Level and Slope Walking
4.2. The Relationship between the PSI and JRF of the Lower Extremity during Level and Slope Walking
4.3. The Relationship between the COP-COM Distance and the JRF of the Lower Extremity during Level and Slope Walking
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Franz, J.R.; Lyddon, N.E.; Kram, R. Mechanical work performed by the in dividual legs during uphill and downhill walking. J. Biomech. 2012, 45, 257–262. [Google Scholar] [CrossRef]
- Kuster, M.; Sakurai, S.; Wood, G. Kinematic and kinetic comparison of downhill and level walking. Clin. Biomech. 1995, 10, 79–84. [Google Scholar] [CrossRef]
- Gottschall, J.S.; Kram, R. Ground reaction forces during downhill and uphill running. J. Biomech. 2005, 38, 445–452. [Google Scholar] [CrossRef] [PubMed]
- Lay, A.N.; Hass, C.J.; Gregor, R.J. The effects of sloped surfaces on locomotion: A kinematic and kinetic analysis. J. Biomech. 2006, 39, 1621–1628. [Google Scholar] [CrossRef] [PubMed]
- McIntosh, A.S.; Beatty, K.T.; Dwan, L.N.; Vickers, D.R. Gait dynamics on an inclined walkway. J. Biomech. 2006, 39, 2491–2502. [Google Scholar] [CrossRef] [PubMed]
- Nolte, H.; Chaplin, C. The Effects of Load and Speed on the Ground Reaction Forces of the Soldier During Uphill, Downhill and Level Waking. In Proceedings of the 33rd International Conference of Biomechanics in Sports, Poitiers, France, 29 June–3 July 2015; pp. 1130–1132. [Google Scholar]
- Kleiner, A.F.R.; Pacifici, I.; Condoluci, C.; Sforza, C.; Galli, M. Slip avoidance strategies in children with bilateral spastic cerebral palsy and crouch gait. Clin. Biomech. 2018, 55, 36–39. [Google Scholar] [CrossRef] [PubMed]
- Park, J.H.; Kim, S.; Nussbaum, M.A.; Srinivasan, D. Effects of back-support exoskeleton use on gait performance and stability during level walking. Gait Posture 2022, 92, 181–190. [Google Scholar] [CrossRef] [PubMed]
- Simpkins, C.; Ahn, J.; Yang, F. Effects of anterior load carriage on gait parameters: A systematic review with meta-analysis. Appl. Ergon. 2022, 98, 103587. [Google Scholar] [CrossRef] [PubMed]
- Wikstrom, E.A.; Tillman, M.D.; Smith, A.N.; Borsa, P.A. A new force-plate technology measure of dynamic postural stability: The dynamic postural stability index. J. Athl. Train. 2005, 40, 305–309. [Google Scholar]
- Ren, Y.; Wang, C.; Zhang, L.; Lu, A. The effects of visual cognitive tasks on landing stability and lower extremity injury risk in high-level soccer players. Gait Posture 2022, 92, 230–235. [Google Scholar] [CrossRef]
- Kollock, R.; Thomas, J.; Hale, D.; Sanders, G.; Long, A.; Dawes, J.; Peveler, W. The Effects of Firefighter Equipment and Gear on the Static and Dynamic Postural Stability of Fire Cadets. Gait Posture 2021, 88, 292–296. [Google Scholar] [CrossRef]
- Maeda, N.; Hirota, A.; Komiya, M.; Morikawa, M.; Mizuta, R. Intrinsic foot muscle hardness is related to dynamic postural stability after landing in healthy young men. Gait Posture 2021, 86, 192–198. [Google Scholar] [CrossRef]
- Meardon, S.; Klusendorf, A. Original Research Influence of Injury on Dynamic Postural. Int. J. Sports Phys. Ther. 2016, 11, 366–377. [Google Scholar]
- Hsue, B.J.; Miller, F.; Su, F.C. The dynamic balance of the children with cerebral palsy and typical developing during gait. Part I: Spatial relationship between COM and COP trajectories. Gait Posture 2009, 29, 465–470. [Google Scholar] [CrossRef]
- Schober, P.; Boer, C.; Schwarte, L.A. Correlation Coefficients: Appropriate Use and Interpretation. Anesth. Analg. 2018, 126, 1763–1768. [Google Scholar] [CrossRef] [PubMed]
- Sheehan, R.C.; Gottschall, J.S. At similar angles, slope walking has a greater fall risk than stair walking. Appl. Ergon. 2012, 43, 473–478. [Google Scholar] [CrossRef] [PubMed]
- Dong, R.G.; Wu, J.Z.; Dai, F.; Breloff, S.P. An alternative method for analyzing the slip potential of workers on sloped surfaces. Saf. Sci. 2021, 133, 105026. [Google Scholar] [CrossRef]
- Alexander, N.; Schwameder, H. Lower limb joint forces during walking on the level and slopes at different inclinations. Gait Posture 2016, 45, 137–142. [Google Scholar] [CrossRef]
- Alexander, N.; Schwameder, H. A forefoot strike pattern during 18° uphill walking leads to greater ankle joint and plantar flexor loading. Gait Posture 2023, 103, 44–49. [Google Scholar] [CrossRef]
- Yang, F.; Pai, Y.-C. Can sacral marker approximate center of mass during gait and slip-fall recovery among community-dwelling older adults? J. Biomech. 2014, 47, 3807–3812. [Google Scholar] [CrossRef] [PubMed]
- Pacifici, I.; Galli, M.; Kleiner, A.F.R.; Corona, F.; Coghe, G.; Marongiu, E.; Loi, A.; Crisafulli, A.; Cocco, E.; Marrosu, M.G.; et al. The Required Coefficient of Friction for evaluating gait alterations in people with Multiple Sclerosis during gait. Mult. Scler. Relat. Disord. 2016, 10, 174–178. [Google Scholar] [CrossRef]
- Yamaguchi, T. Distribution of the local required coefficient of friction in the shoe–floor contact area during straight walking: A pilot study. Biotribology 2019, 19, 100101. [Google Scholar] [CrossRef]
- Beschorner, K.E.; Albert, D.L.; Redfern, M.S. Required coefficient of friction during level walking is predictive of slipping. Gait Posture 2016, 48, 256–260. [Google Scholar] [CrossRef] [PubMed]
- Silva, L.M.; Stergiou, N. The basic of gait analysis. In Biomechanics and Gait Analysis; Geraghty, F., Ed.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 225–250. [Google Scholar]
- Abdul Yamin, N.A.A.; Basaruddin, K.S.; Bakar, S.A.; Salleh, A.F.; Som, M.H.M.; Yazid, H.; Hoang, T. Quantification of Gait Stability during Incline and Decline Walking: The Responses of Required Coefficient of Friction and Dynamic Postural Index. J. Healthc. Eng. 2022, 2022, 7716821. [Google Scholar] [CrossRef] [PubMed]
- Lay, A.N.; Hass, C.J.; Nichols, T.R.; Gregor, R.J. The effects of sloped surfaces on locomotion: An electromyographic analysis. J. Biomech. 2007, 40, 1276–1285. [Google Scholar] [CrossRef] [PubMed]
- Wall-Scheffler, C.M.; Chumanov, E.; Steudel-Numbers, K.; Heiderscheit, B. EMG activity across gait and incline: The impact of muscular activity on human morphology. Am. J. Phys. Anthr. 2011, 143, 601–611. [Google Scholar] [CrossRef]
- Dewolf, A.H.; Ivanenko, Y.P.; Mesquita, R.M.; Lacquaniti, F.; Willems, P.A. Neuromechanical adjustments when walking with an aiding or hindering horizontal force. Eur. J. Appl. Physiol. 2020, 120, 91–106. [Google Scholar] [CrossRef]
- Dewolf, A.H.; Ivanenko, Y.; Zelik, K.E.; Lacquaniti, F.; Willems, P.A. Kinematic patterns while walking on a slope at different speeds. J. Appl. Physiol. 2018, 125, 642–653. [Google Scholar] [CrossRef] [PubMed]
- Abdul Yamin, N.A.A.; Basaruddin, K.S.; Bakar, S.A.; Salleh, A.F.; Som, M.H.M.; Bakar, A.H.A. Lower extremity joint reaction forces and plantar fascia strain responses due to incline and decline walking. Acta Bioeng. Biomech. 2022, 24, 67–74. [Google Scholar]
- Lewis, C.L.; Sahrmann, S.A.; Moran, D.W. Effect of hip angle on anterior hip joint force during gait. Gait Posture 2010, 32, 603–607. [Google Scholar] [CrossRef]
- Biga, L.M.; Bronson, S.; Dawson, S.; Harwell, A.; Hopkins, R.; Kaufmann, J.; LeMaster, M.; Matern, P.; Morrison-Graham, K.; Oja, K.; et al. Anatomy & Physiology; OpenStax/Oregon State University: Corvallis, OR, USA, 2008. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Equation | |
|---|---|---|
| APSI | (2) | |
| MLSI | (3) | |
| VSI | (4) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamin, N.A.A.A.; Basaruddin, K.S.; Ijaz, M.F.; Mat Som, M.H.; Shahrol Aman, M.N.S.; Takemura, H. Correlation between Postural Stability and Lower Extremity Joint Reaction Forces in Young Adults during Incline and Decline Walking. Appl. Sci. 2023, 13, 13246. https://doi.org/10.3390/app132413246
Yamin NAAA, Basaruddin KS, Ijaz MF, Mat Som MH, Shahrol Aman MNS, Takemura H. Correlation between Postural Stability and Lower Extremity Joint Reaction Forces in Young Adults during Incline and Decline Walking. Applied Sciences. 2023; 13(24):13246. https://doi.org/10.3390/app132413246
Chicago/Turabian StyleYamin, Noor Arifah Azwani Abdul, Khairul Salleh Basaruddin, Muhammad Farzik Ijaz, Mohd Hanafi Mat Som, Muhammad Nazrin Shah Shahrol Aman, and Hiroshi Takemura. 2023. "Correlation between Postural Stability and Lower Extremity Joint Reaction Forces in Young Adults during Incline and Decline Walking" Applied Sciences 13, no. 24: 13246. https://doi.org/10.3390/app132413246
APA StyleYamin, N. A. A. A., Basaruddin, K. S., Ijaz, M. F., Mat Som, M. H., Shahrol Aman, M. N. S., & Takemura, H. (2023). Correlation between Postural Stability and Lower Extremity Joint Reaction Forces in Young Adults during Incline and Decline Walking. Applied Sciences, 13(24), 13246. https://doi.org/10.3390/app132413246