
A Hybrid-Cryptography Engine for Securing Intra-Vehicle Communications


Abstract
:1. Introduction
1.1. The EMERGE Project
1.2. Research Contributions & Paper Organization
- We present a novel solution for securing intra-vehicle networks through the usage of a logical, centralized component that uses hybrid-cryptography to provide confidentiality and multi-source authentication: the Crypto-Engine. In comparison with similar solutions (e.g., the Secure Gateways made available by several vendors (An example can be found in https://www.nxp.com/docs/en/white-paper/AUTOGWDEVWPUS.pdf (accessed on 27 November 2023))), the Crypto-Engine features can be distributed where needed, releasing manufacturers from adopting or interfacing with third-party components to secure communications;
- We provide a reference implementation of the hybrid-cryptography scheme for the adoption in intra-vehicle network components and a thorough analysis on its performance in a relevant real-world use case. While the presented implementation is software-based, the Crypto-Engine is designed to support HW acceleration as reported in Section 3.2 and Section 5. This enables further performance improvements while maintaining the overall architecture unaltered.
2. Intra-Vehicle Security
2.1. General Overview
2.2. Challenges and Security Measures in Intra-Vehicle Networks
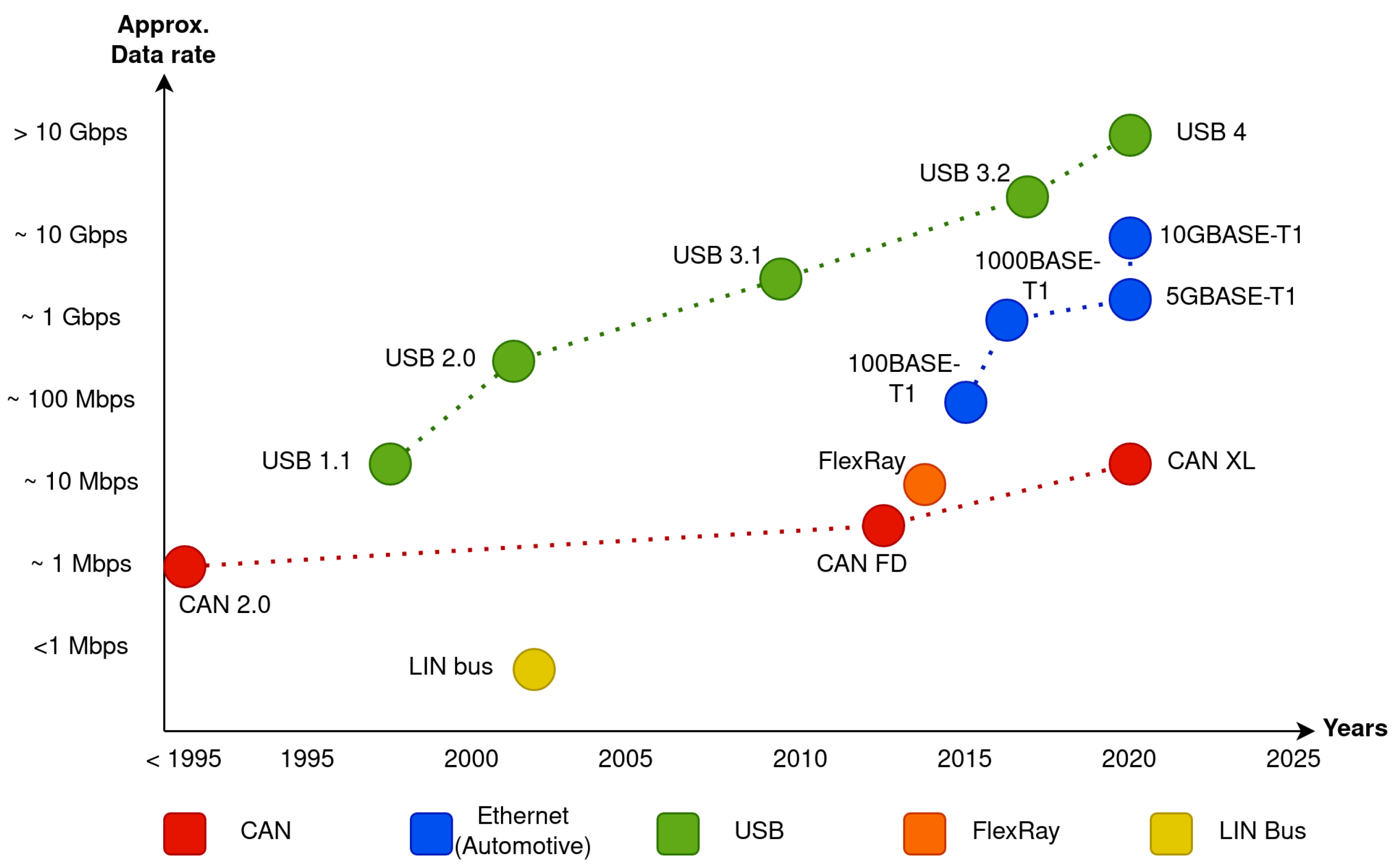
- Intra-Vehicle Communication Bus Security
- CAN bus (CAN-FD, CAN-XL);
- LIN bus;
- Flexray;
- Automotive Ethernet.
- Network Traffic filtering
- Intrusion Detection
- Artificial Intelligence and Machine Learning
- Security Standards
2.3. Cryptography in Intra-Vehicle Networks
2.4. Hardware Security Modules
Trusted Platform Module
3. The Crypto-Engine
3.1. Principles and Logical Architecture of the Engine
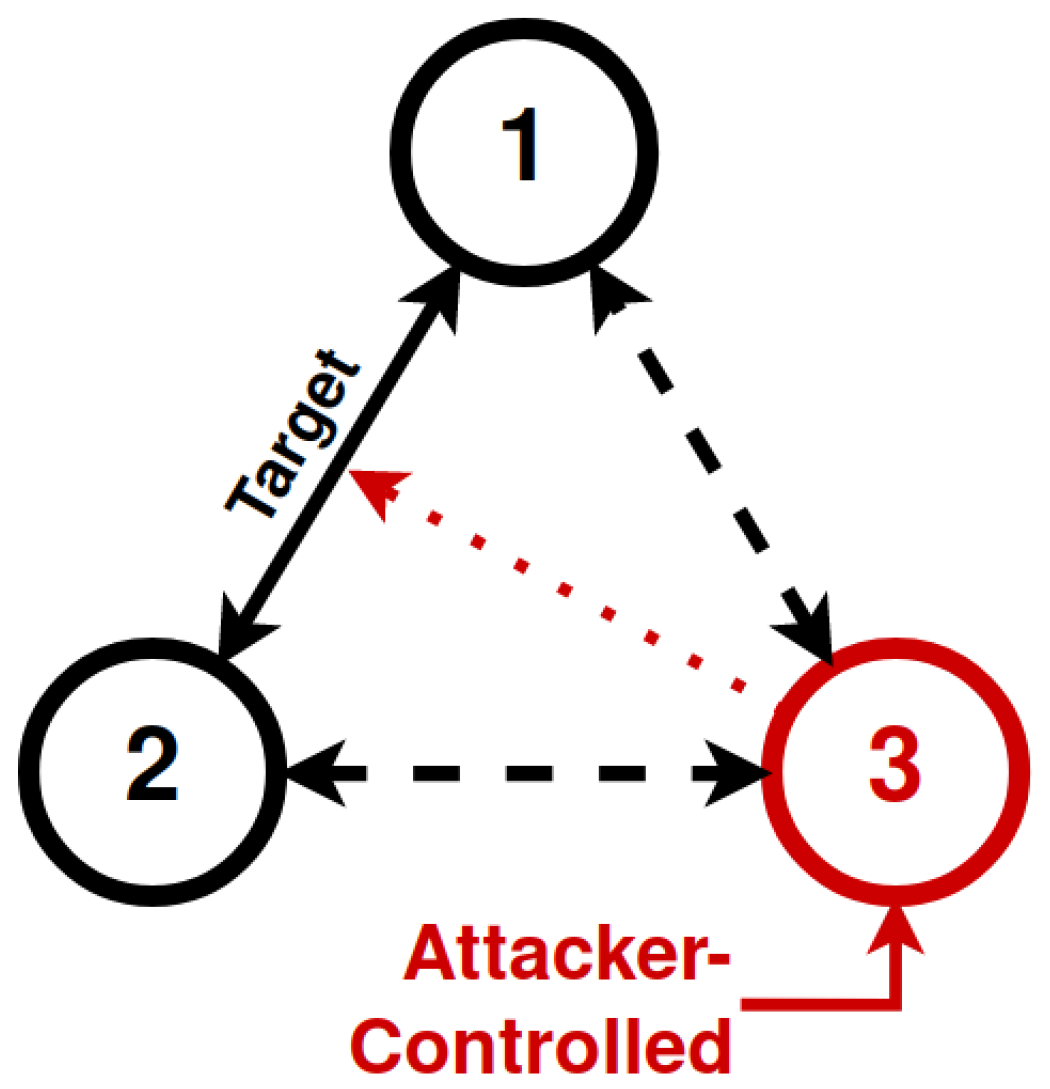
- Robustness against attacks on the topological integrity of the network;
- Generation of shared secrets on communication sessions with arbitrary topology;
- Scalability of multi-cast and converge-cast sessions;
3.2. Hardware Acceleration
- A software-only solution, in which ECTAKS and the other services are implemented in pure software for maximum flexibility across different HW platforms;
- An “internally-accelerated” software solution, within which the cryptographic operations are accelerated through platform-specific HW features and instructions (e.g., ARM/Intel cryptographic instructions or custom in-HW cryptographic implementations [63]);
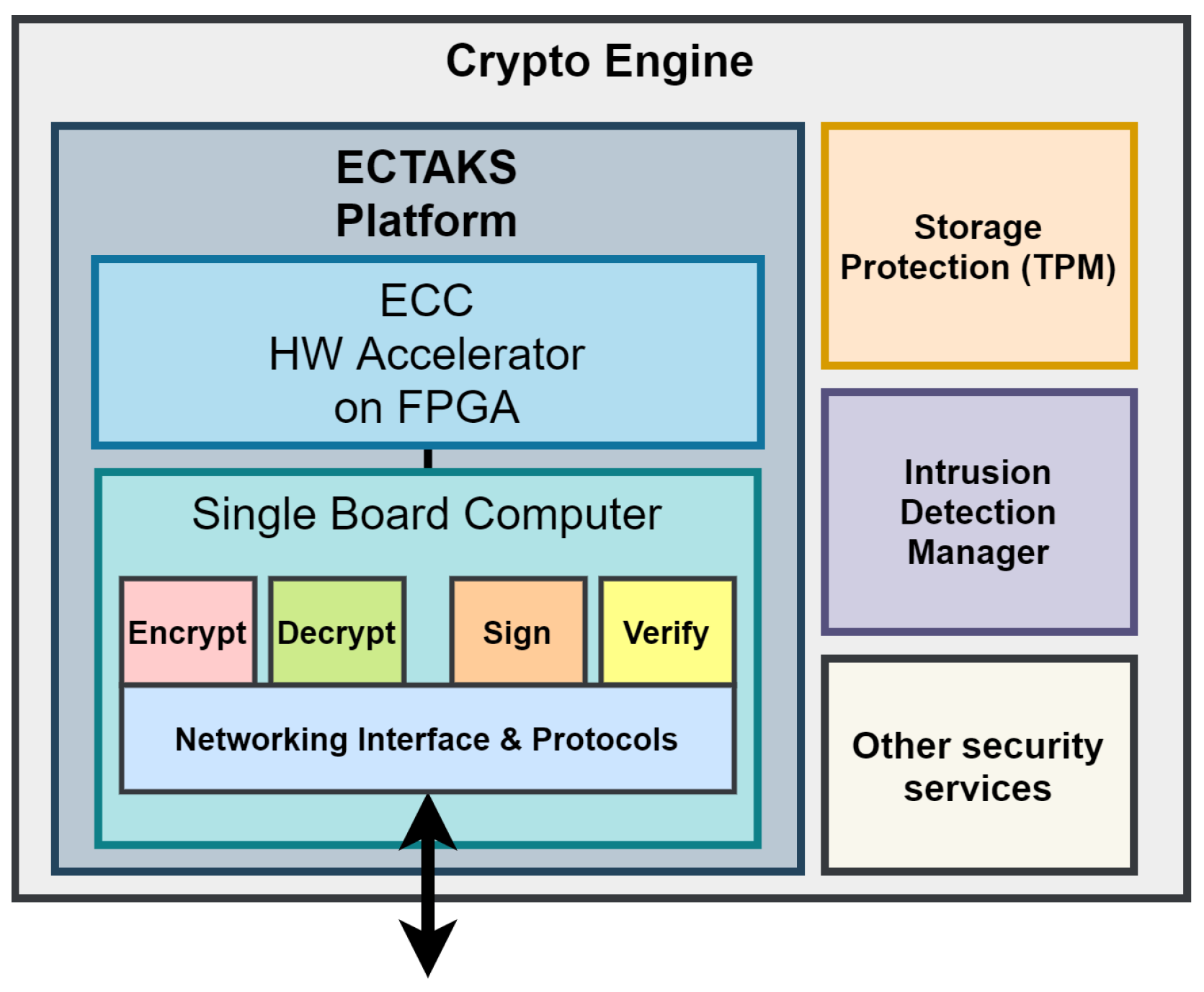
- Using an external HW platform (e.g., a separated FPGA platform), towards which a software-based solution can offload cryptographic operations (Figure 3) for improved flexibility and re-usability;
- Adopting a hybrid programmable platform (e.g., ZYNQ (Xilinx ZYNQ platform architecture, available: http://www.ioe.nchu.edu.tw/Pic/CourseItem/4468_20_Zynq_Architecture.pdf (accessed on 27 November 2023))) to implement the ECTAKS primitives in SW, while the hardware acceleration for modular arithmetic operations and ECC is in the programmable logic (HW).
3.3. Security Analysis
4. Crypto-Engine Implementation in the EMERGE Project
4.1. Implementation
4.2. Validation and Performance Evaluation
- Experiments setup
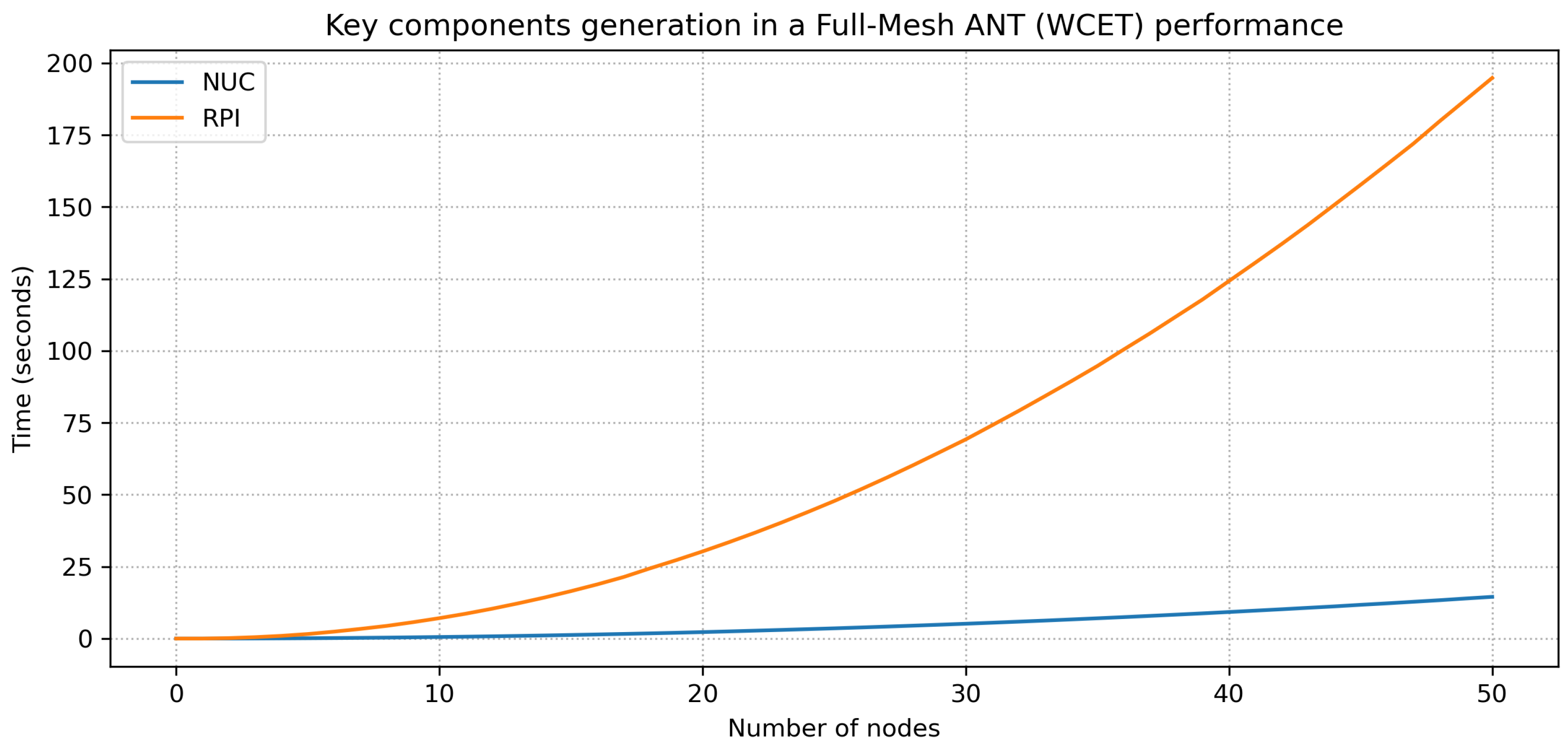
- Raspberry PI 3B+ board, (abbr. RPI) equipped with a 1.4 GHz 64-bit quad-core ARM Cortex A53 processor, 1 GB of LPDDR2 (800 MT/s) RAM running Raspberry PI OS (Raspbian) 64-bit Linux;
- Intel NUC 11 Pro, (abbr. NUC) model NUC11TNHi3, equipped with a Intel i3-1115G4, clock frequency 1.7 GHz to 4.1 GHz (boost), 8 GB of DDR4 (3200 MT/s) RAM, running Ubuntu 20.04 LTS 64-bit Linux.
- Experiment 1: Generation of ECTAKS Key Components
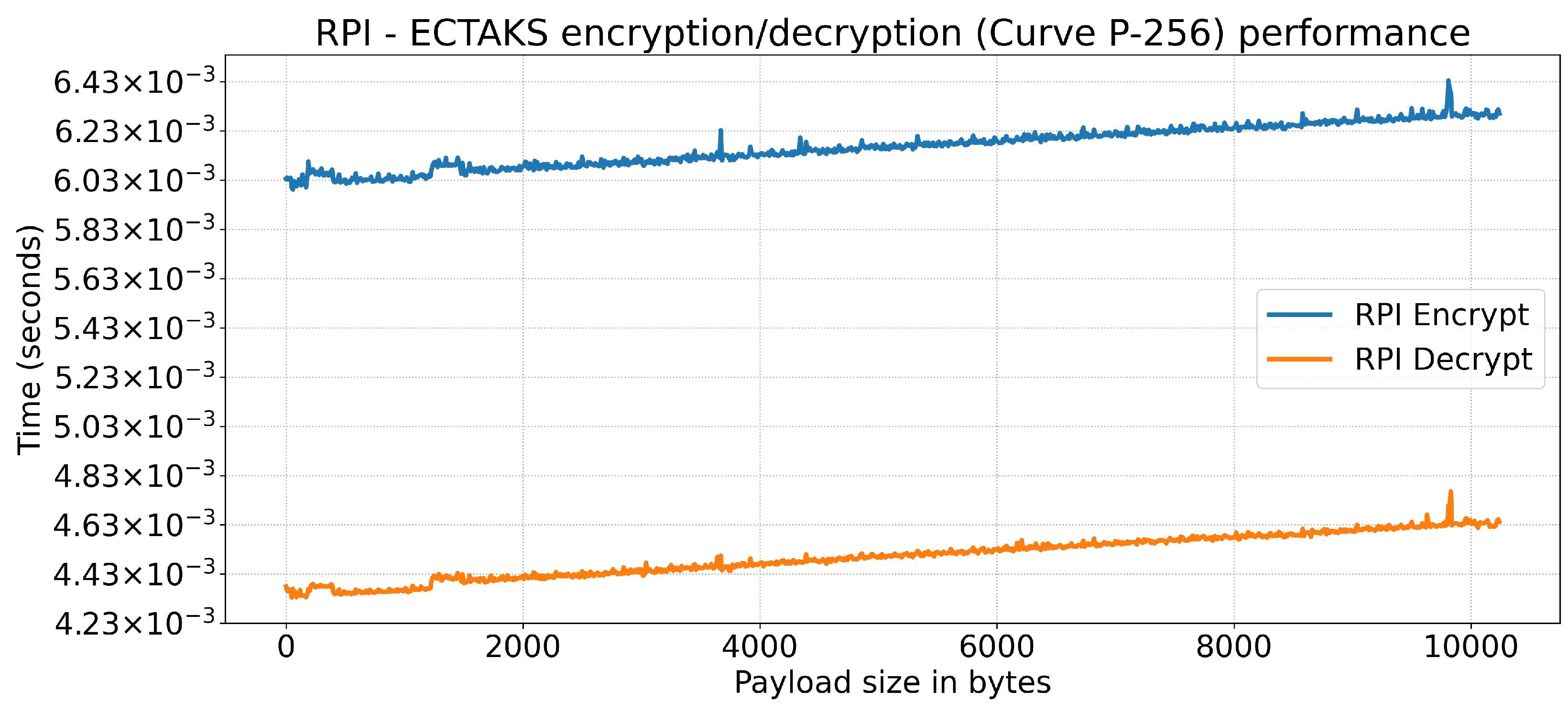
- Experiment 2: ECTAKS Encryption/Decryption
- There is a noticeable instability for payloads smaller than 1 KiB;
- In the encryption, there are latency spikes separated by ∼1.5 KiB during the encryption;
- The growth of the decryption time increases, reducing the gap with the encryption performance on large payloads.
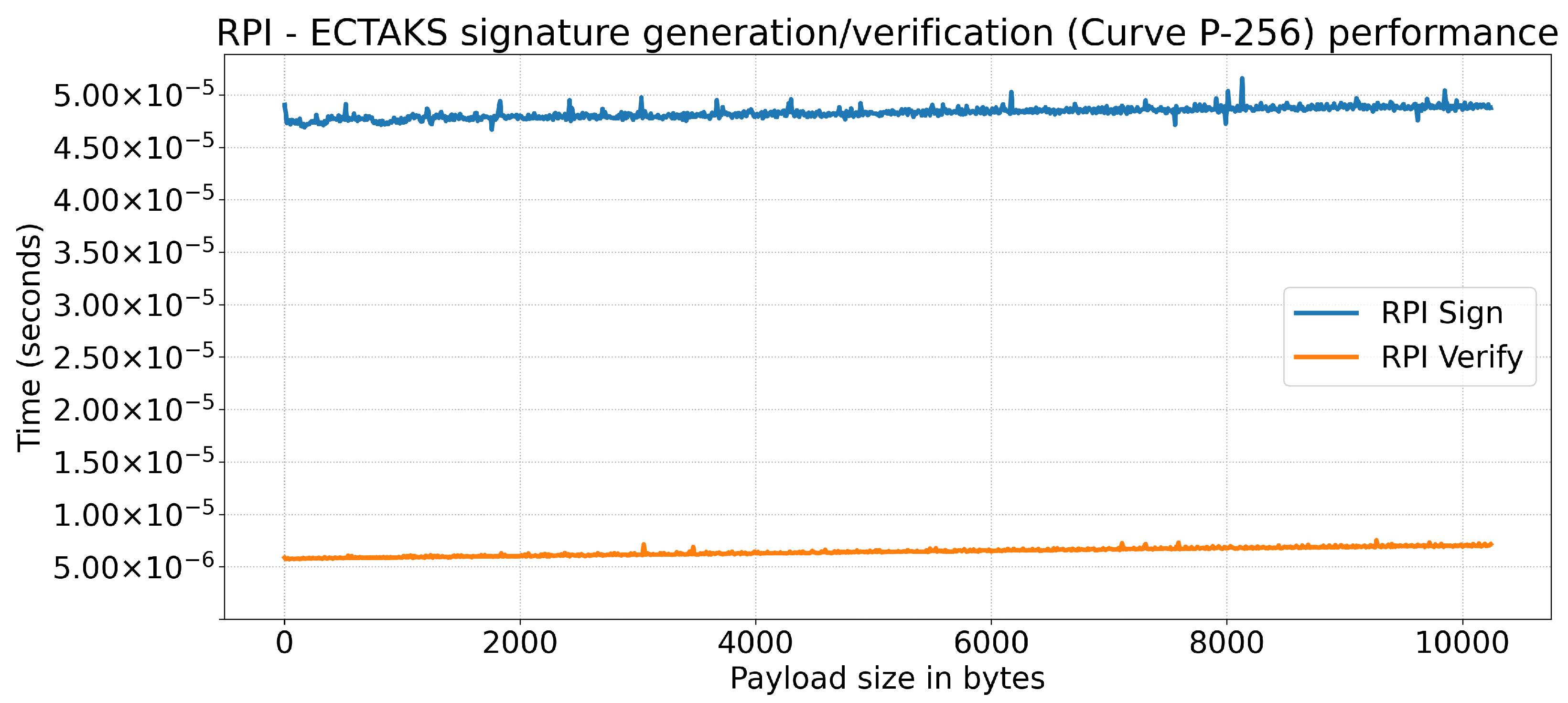
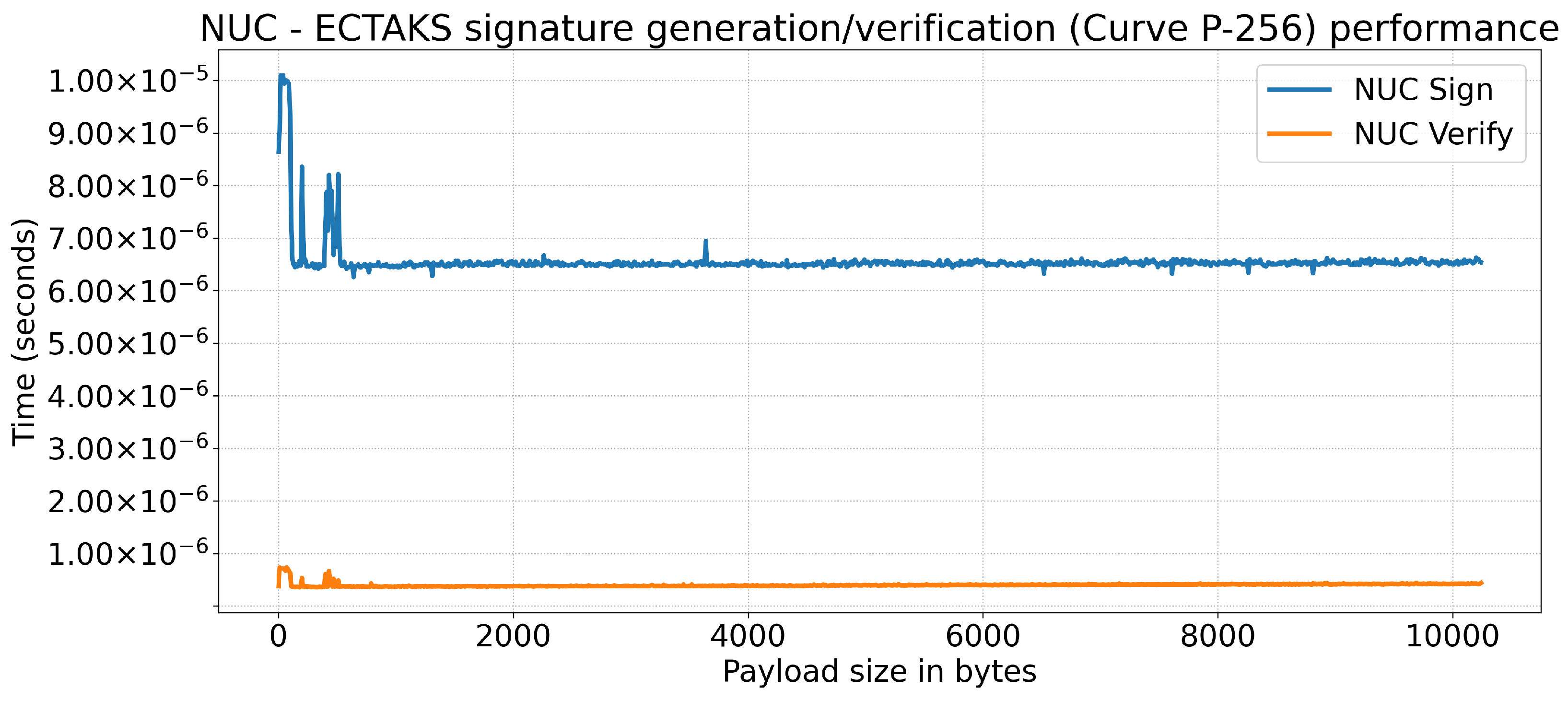
- Experiment 3: ECTAKS Signature Generation/Verification
4.3. Discussion of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AES | Advanced Encryption Standard |
| ANT | Authenticated Network Topology |
| CAN | Controller Area Network (protocol) |
| CAN-FD | Controller Area Network—Full Datarate |
| CAN-XL | Controller Area Network—eXtended Length |
| CBC | Cipher Block chaining—Mode of operation for block ciphers |
| CBC-MAC | CBC-based MAC |
| CCM | CTR with CBC-MAC |
| CDHP | Computational Diffie-Hellman Problem |
| CTR | Counter Mode—Mode of operation for block ciphers |
| DDHP | Decisional Diffie-Hellman Problem |
| EAP | Extensible Authentication Protocol |
| ECC | Elliptic Curve Cryptography |
| ECDH | Elliptic Curve Diffie-Hellman |
| ECDSA | Elliptic Curve Digital Signature Algorithm |
| ECIES | Elliptic Curve Integrated Encryption Scheme |
| ECTAK | Elliptic Curve Topology Authenticated Key |
| ECTAKS | Elliptic Curve Topology Authenticated Key Scheme |
| ECU | Electronic Control Unit |
| EMERGE | EMERGE Project—Veicoli Commerciali Leggeri & Tecnologie EMERGEnti per operatività di tutti i giorni e di ausilio nelle EMERGEnze |
| GNSS | Global Navigation Satellite System |
| GPU | Graphical Processing Unit |
| HMAC | Hash-based MAC |
| HSM | Hardware Security Module |
| IDS | Intrusion Detection System |
| IRS | Intrusion Response System |
| KDF | Key Derivation Function |
| LIN | Local Interconnect Network (protocol) |
| LKC | ECTAKS Local Key Component |
| MAC | Message Authentication Code |
| MEC | Mobile Edge Computing |
| OBU | On-board Unit |
| PBKDF2 | Public-Key KDF version 2 |
| SBC | Single-Board Computer |
| SHA256 | Secure Hash Algorithm version 2 with 256 bits hash size |
| SIEM | Security Information and Event Management |
| TKC | ECTAKS Transport Key Component |
| TLS | Transport Layer Security |
| TV | ECTAKS Topology Vector |
| TPM | Trusted Platform Module |
| USB | Universal Serial Bus (protocol family) |
| V2I | Vehicle to Infrastructure communications |
| V2V | Vehicle to Vehicle communications |
| V2X | Vehicle to Everything communications |
References
- Khan, S.K.; Shiwakoti, N.; Stasinopoulos, P.; Chen, Y. Cyber-attacks in the next-generation cars, mitigation techniques, anticipated readiness and future directions. Accid. Anal. Prev. 2020, 148, 105837. [Google Scholar] [CrossRef]
- Giannaros, A.; Karras, A.; Theodorakopoulos, L.; Karras, C.; Kranias, P.; Schizas, N.; Kalogeratos, G.; Tsolis, D. Autonomous Vehicles: Sophisticated Attacks, Safety Issues, Challenges, Open Topics, Blockchain, and Future Directions. J. Cybersecur. Priv. 2023, 3, 493–543. [Google Scholar] [CrossRef]
- Jeong, S.; Ryu, M.; Kang, H.; Kim, H.K. Infotainment System Matters: Understanding the Impact and Implications of In-Vehicle Infotainment System Hacking with Automotive Grade Linux. In Proceedings of the Thirteenth ACM Conference on Data and Application Security and Privacy (CODASPY’23), Charlotte, NC, USA, 24–26 April 2023; Association for Computing Machinery: New York, NY, USA, 2023; pp. 201–212. [Google Scholar] [CrossRef]
- Singh, N.; Ganesan, V.; Rebeiro, C. Secure Processor Architectures. In Handbook of Computer Architecture; Springer Nature: Singapore, 2022; pp. 1–29. [Google Scholar] [CrossRef]
- Chiocchio, S.; Cinque, E.; Persia, A.; Salvatori, P.; Stallo, C.; Salvitti, M.; Valentini, F.; Pratesi, M.; Rispoli, F.; Neri, A.; et al. A Comprehensive Framework for Next Generation of Cooperative ITSs. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10–13 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Di Sciullo, G.; Zitella, L.; Cinque, E.; Santucci, F.; Pratesi, M.; Valentini, F. Experimental Validation of C-V2X Mode 4 Sidelink PC5 Interface for Vehicular Communications. In Proceedings of the 2022 61st FITCE International Congress Future Telecommunications: Infrastructure and Sustainability (FITCE), Rome, Italy, 29–30 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Cinque, E.; Valentini, F.; Persia, A.; Chiocchio, S.; Santucci, F.; Pratesi, M. V2X Communication Technologies and Service Requirements for Connected and Autonomous Driving. In Proceedings of the 2020 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 18–20 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- ISO 21434:2021; Road Vehicles—Cybersecurity Engineering. International Organization for Standardization, 2021. Available online: https://www.iso.org/standard/70918.html (accessed on 27 November 2023).
- Tuohy, S.; Glavin, M.; Hughes, C.; Jones, E.; Trivedi, M.; Kilmartin, L. Intra-Vehicle Networks: A Review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 534–545. [Google Scholar] [CrossRef]
- Chen, H.; Liu, J.; Wang, J.; Xun, Y. Towards secure intra-vehicle communications in 5G advanced and beyond: Vulnerabilities, attacks and countermeasures. Veh. Commun. 2023, 39, 100548. [Google Scholar] [CrossRef]
- Rathore, R.S.; Hewage, C.; Kaiwartya, O.; Lloret, J. In-Vehicle Communication Cyber Security: Challenges and Solutions. Sensors 2022, 22, 6679. [Google Scholar] [CrossRef] [PubMed]
- Fröschle, S.; Stühring, A. Analyzing the Capabilities of the CAN Attacker. In Proceedings of the Computer Security—ESORICS 2017, Oslo, Norway, 11–15 September 2017; pp. 464–482. [Google Scholar] [CrossRef]
- Sahana, Y.P.; Gotkhindikar, A.; Tiwari, S.K. Survey on CAN-Bus Packet Filtering Firewall. In Proceedings of the 2022 International Conference on Edge Computing and Applications (ICECAA), Tamilnadu, India, 13–15 October 2022; pp. 472–478. [Google Scholar] [CrossRef]
- Park, S.B.; Jo, H.J.; Lee, D.H. Flooding attack mitigator for in-vehicle CAN using fault confinement in CAN protocol. Comput. Secur. 2023, 126, 103091. [Google Scholar] [CrossRef]
- Murvay, P.S.; Groza, B. Practical Security Exploits of the FlexRay In-Vehicle Communication Protocol. In Proceedings of the Risks and Security of Internet and Systems; Zemmari, A., Mosbah, M., Cuppens-Boulahia, N., Cuppens, F., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 172–187. [Google Scholar]
- Kishikawa, T.; Hirano, R.; Ujiie, Y.; Haga, T.; Matsushima, H.; Fujimura, K.; Anzai, J. Vulnerability of FlexRay and Countermeasures. SAE Int. J. Transp. Cybersecur. Priv. 2019, 2, 21–33. [Google Scholar] [CrossRef]
- Lee, T.Y.; Lin, I.A.; Liao, R.H. Design of a FlexRay/Ethernet Gateway and Security Mechanism for In-Vehicle Networks. Sensors 2020, 20, 641. [Google Scholar] [CrossRef]
- Püllen, D.; Anagnostopoulos, N.A.; Arul, T.; Katzenbeisser, S. Security and Safety Co-Engineering of the FlexRay Bus in Vehicular Networks. In Proceedings of the International Conference on Omni-Layer Intelligent Systems (COINS’19), Crete, Greece, 5–7 May 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 31–37. [Google Scholar] [CrossRef]
- Murvay, P.S.; Groza, B. Efficient Physical Layer Key Agreement for FlexRay Networks. IEEE Trans. Veh. Technol. 2020, 69, 9767–9780. [Google Scholar] [CrossRef]
- ISO 17987-1:2016; Road vehicles—Local Interconnect Network (LIN)—Part 1: General Information and Use Case Definition. International Organization for Standardization, 2016. Available online: https://www.iso.org/standard/61222.html (accessed on 27 November 2023).
- Páez, F.; Kaschel, H. Design and Testing of a Computer Security Layer for the LIN Bus. Sensors 2022, 22, 6901. [Google Scholar] [CrossRef]
- Ernst, J.M.; Michaels, A.J. LIN Bus Security Analysis. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2085–2090. [Google Scholar] [CrossRef]
- Paez, F.; Kaschel, H. Towards a Robust Computer Security Layer for the LIN Bus. In Proceedings of the 2021 IEEE International Conference on Automation/XXIV Congress of the Chilean Association of Automatic Control (ICA-ACCA), Valparaiso, Chile, 22–26 March 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Ju, H.; Jeon, B.; Kim, D.; Jung, B.; Jung, K. Security Considerations for In-Vehicle Secure Communication. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 16–18 October 2019; pp. 1404–1406. [Google Scholar] [CrossRef]
- Luo, F.; Hou, S. Security Mechanisms Design of Automotive Gateway Firewall. In Proceedings of the WCX SAE World Congress Experience; SAE International; Warrendale, PE, USA, 2019. [Google Scholar] [CrossRef]
- Karopoulos, G.; Kambourakis, G.; Chatzoglou, E.; Hernández-Ramos, J.L.; Kouliaridis, V. Demystifying In-Vehicle Intrusion Detection Systems: A Survey of Surveys and a Meta-Taxonomy. Electronics 2022, 11, 1072. [Google Scholar] [CrossRef]
- Wu, W.; Li, R.; Xie, G.; An, J.; Bai, Y.; Zhou, J.; Li, K. A Survey of Intrusion Detection for In-Vehicle Networks. IEEE Trans. Intell. Transp. Syst. 2020, 21, 919–933. [Google Scholar] [CrossRef]
- Xun, Y.; Deng, Z.; Liu, J.; Zhao, Y. Side Channel Analysis: A Novel Intrusion Detection System Based on Vehicle Voltage Signals. IEEE Trans. Veh. Technol. 2023, 72, 1–10. [Google Scholar] [CrossRef]
- Basavaraj, D.; Tayeb, S. Towards a Lightweight Intrusion Detection Framework for In-Vehicle Networks. J. Sens. Actuator Netw. 2022, 11, 6. [Google Scholar] [CrossRef]
- Khan, J.; Lim, D.W.; Kim, Y.S. Intrusion Detection System CAN-Bus In-Vehicle Networks Based on the Statistical Characteristics of Attacks. Sensors 2023, 23, 3554. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Han, M. Priv-IDS: A Privacy Protection and Intrusion Detection Framework for In-Vehicle Network. In Proceedings of the Machine Learning for Cyber Security; Xu, Y., Yan, H., Teng, H., Cai, J., Li, J., Eds.; Springer Nature Switzerland: Cham, Switzerland, 2023; pp. 165–179. [Google Scholar]
- Islam, R.; Refat, R.U.D.; Yerram, S.M.; Malik, H. Graph-based intrusion detection system for controller area networks. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1727–1736. [Google Scholar] [CrossRef]
- Kwak, B.I.; Han, M.L.; Kim, H.K. Cosine similarity based anomaly detection methodology for the CAN bus. Expert Syst. Appl. 2021, 166, 114066. [Google Scholar] [CrossRef]
- Hamad, M.; Tsantekidis, M.; Prevelakis, V. Red-Zone: Towards an Intrusion Response Framework for Intra-Vehicle System. In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), Crete, Greece, 3–5 May 2019. [Google Scholar] [CrossRef]
- Barletta, V.S.; Caivano, D.; Vincentiis, M.D.; Ragone, A.; Scalera, M.; Martìn, M.Á.S. V-SOC4AS: A Vehicle-SOC for Improving Automotive Security. Algorithms 2023, 16, 112. [Google Scholar] [CrossRef]
- Bari, B.S.; Yelamarthi, K.; Ghafoor, S. Intrusion Detection in Vehicle Controller Area Network (CAN) Bus Using Machine Learning: A Comparative Performance Study. Sensors 2023, 23, 3610. [Google Scholar] [CrossRef]
- Agrawal, K.; Alladi, T.; Agrawal, A.; Chamola, V.; Benslimane, A. NovelADS: A Novel Anomaly Detection System for Intra-Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22596–22606. [Google Scholar] [CrossRef]
- Cheng, P.; Xu, K.; Li, S.; Han, M. TCAN-IDS: Intrusion Detection System for Internet of Vehicle Using Temporal Convolutional Attention Network. Symmetry 2022, 14, 310. [Google Scholar] [CrossRef]
- ETSI, TS 102 731—Intelligent Transport Systems (ITS); Security; Security Services and Architecture. Available online: https://www.etsi.org/deliver/etsi_ts/102700_102799/102731/01.01.01_60/ts_102731v010101p.pdf (accessed on 27 November 2023).
- 3GPP. Technical Specification N. 33501. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3169 (accessed on 27 November 2023).
- IEEE Std 1609.2-2016 (Revision of IEEE Std 1609.2-2013); IEEE Standard for Wireless Access in Vehicular Environments–Security Services for Applications and Management Messages. IEEE: Piscataway, NJ, USA, 2016; pp. 1–240. [CrossRef]
- Rezazadeh Baee, M.A.; Simpson, L.; Boyen, X.; Foo, E.; Pieprzyk, J. Authentication Strategies in Vehicular Communications: A Taxonomy and Framework. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 129. [Google Scholar] [CrossRef]
- Palaniswamy, B.; Camtepe, S.; Foo, E.; Pieprzyk, J. An Efficient Authentication Scheme for Intra-Vehicular Controller Area Network. IEEE Trans. Inf. Forensics Secur. 2020, 15, 3107–3122. [Google Scholar] [CrossRef]
- de Andrade, R.; Santos, M.M.D.; Justo, J.F.; Yoshioka, L.R.; Hof, H.J.; Kleinschmidt, J.H. Security architecture for automotive communication networks with CAN FD. Comput. Secur. 2023, 129, 103203. [Google Scholar] [CrossRef]
- Wu, W.; Dai, J.; Huang, H.; Zhao, Q.; Zeng, G.; Li, R. A Digital Watermark Method for In-Vehicle Network Security Enhancement. IEEE Trans. Veh. Technol. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Park, C.H.; Kim, Y.; Jo, J.Y. A Secure Communication Method for CANBus. In Proceedings of the 2021 IEEE 11th Annual Computing and Communication Workshop and Conference (CCWC), Cookeville, NV, USA, 27–30 January 2021; pp. 773–778. [Google Scholar] [CrossRef]
- Civino, R.; Longo, R. Formal security proof for a scheme on a topological network. Adv. Math. Commun. 2023, 17, 562–571. [Google Scholar] [CrossRef]
- Carvajal-Roca, I.E.; Wang, J.; Du, J.; Wei, S. A Semi-Centralized Dynamic Key Management Framework for In-Vehicle Networks. IEEE Trans. Veh. Technol. 2021, 70, 10864–10879. [Google Scholar] [CrossRef]
- Khatri, N.; Shrestha, R.; Nam, S.Y. Security Issues with In-Vehicle Networks, and Enhanced Countermeasures Based on Blockchain. Electronics 2021, 10, 893. [Google Scholar] [CrossRef]
- Aliyu, I.; Van Engelenburg, S.; Mu’Azu, M.B.; Kim, J.; Lim, C.G. Statistical Detection of Adversarial Examples in Blockchain-Based Federated Forest In-Vehicle Network Intrusion Detection Systems. IEEE Access 2022, 10, 109366–109384. [Google Scholar] [CrossRef]
- Baldanzi, L.; Crocetti, L.; Bertolucci, M.; Fanucci, L. Analysis of Cybersecurity Weakness in Automotive In-Vehicle Networking and Hardware Accelerators for Real-Time Cryptography. In Applications in Electronics Pervading Industry, Environment and Society; Springer: Berlin/Heidelberg, Germany, 2019; pp. 11–18. [Google Scholar] [CrossRef]
- Trusted Computing Group (TCG) Homepage. 2023. Available online: https://trustedcomputinggroup.org (accessed on 27 November 2023).
- Aragona, R.; Civino, R.; Gavioli, N.; Pugliese, M. An authenticated key scheme over elliptic curves for topological networks. J. Discret. Math. Sci. Cryptogr. 2022, 25, 2429–2448. [Google Scholar] [CrossRef]
- Certicom Research, SEC 1: Elliptic Curve Cryptography. 2009. Available online: https://www.secg.org/sec1-v2.pdf (accessed on 27 November 2023).
- Certicom Research, SEC 2: Recommended Elliptic Curve Domain Parameters. 2010. Available online: https://www.secg.org/sec2-v2.pdf (accessed on 27 November 2023).
- Certicom Research, Standards for Efficient Cryptography SEC 4: Elliptic Curve Qu-Vanstone Implicit Certificate Scheme (ECQV). 2013. Available online: https://www.secg.org/sec4-1.0.pdf (accessed on 27 November 2023).
- Langley, A.; Hamburg, M.; Turner, S. Elliptic Curves for Security. RFC 7748. 2016. Available online: https://www.rfc-editor.org/info/rfc7748 (accessed on 27 November 2023).
- NIST, FIPS 197. Advanced Encryption Standard (AES). 2023. Available online: https://nvlpubs.nist.gov/nistpubs/FIPS/NIST.FIPS.197-upd1.pdf (accessed on 27 November 2023).
- NIST, FIPS 186-5. Digital Signature Standard (DSS). 2023. Available online: https://nvlpubs.nist.gov/nistpubs/FIPS/NIST.FIPS.186-5.pdf (accessed on 27 November 2023).
- NIST, FIPS 180-4. Secure Hash Standard (SHS). 2015. Available online: https://nvlpubs.nist.gov/nistpubs/FIPS/NIST.FIPS.180-4.pdf (accessed on 27 November 2023).
- Rescorla, E. HTTP Over TLS. RFC 2818. 2000. Available online: https://www.rfc-editor.org/info/rfc2818 (accessed on 27 November 2023).
- Rescorla, E. The Transport Layer Security (TLS) Protocol Version 1.3. RFC 8446. 2018. Available online: https://www.rfc-editor.org/info/rfc8446 (accessed on 27 November 2023).
- Nannipieri, P.; Crocetti, L.; Matteo, S.D.; Fanucci, L.; Saponara, S. Hardware Design of an Advanced-Feature Cryptographic Tile within the European Processor Initiative. IEEE Trans. Comput. 2023, 1–14. [Google Scholar] [CrossRef]
- SafeCurves: Choosing Safe Curves for Elliptic-Curve Cryptography. Available online: https://safecurves.cr.yp.to (accessed on 7 March 2022).
- Vollbrecht, J.; Carlson, J.D.; Blunk, L.; Aboba, D.B.D.; Levkowetz, H. Extensible Authentication Protocol (EAP). RFC 3748. 2004. Available online: https://www.rfc-editor.org/info/rfc3748 (accessed on 27 November 2023).
- OpenSSL: Cryptography and SSL/TLS Toolkit. Available online: https://www.openssl.org (accessed on 27 November 2023).
- Free Software Foundation (FSF). The GNU Multi-Precision Bignum Library. 2023. Available online: https://gmplib.org (accessed on 27 November 2023).
- Tiberti, W. Crypto-Engine Performance Measurements. 2023. Available online: https://github.com/wtiberti/Crypto-Engine_ECTAKS_performance (accessed on 27 November 2023).
- Ranganatha Rao, B.; Sujatha, B. A hybrid elliptic curve cryptography (HECC) technique for fast encryption of data for public cloud security. Meas. Sensors 2023, 29, 100870. [Google Scholar] [CrossRef]
- Shao, H.; Piao, C. A Provably Secure Lightweight Authentication Based on Elliptic Curve Signcryption for Vehicle-to-Vehicle Communication in VANETs. IEEE Trans. Ind. Inform. 2023, 1–10. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Experiment | Metric of Interest |
|---|---|---|
| 1 | ECTAKS Key Generation | Time required vs. number of nodes (full-mesh) |
| 2 | Encryption/Decryption | Time required vs. payload size (bytes) |
| 3 | Sign/Verification | Time required vs. payload size (bytes) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tiberti, W.; Civino, R.; Gavioli, N.; Pugliese, M.; Santucci, F. A Hybrid-Cryptography Engine for Securing Intra-Vehicle Communications. Appl. Sci. 2023, 13, 13024. https://doi.org/10.3390/app132413024
Tiberti W, Civino R, Gavioli N, Pugliese M, Santucci F. A Hybrid-Cryptography Engine for Securing Intra-Vehicle Communications. Applied Sciences. 2023; 13(24):13024. https://doi.org/10.3390/app132413024
Chicago/Turabian StyleTiberti, Walter, Roberto Civino, Norberto Gavioli, Marco Pugliese, and Fortunato Santucci. 2023. "A Hybrid-Cryptography Engine for Securing Intra-Vehicle Communications" Applied Sciences 13, no. 24: 13024. https://doi.org/10.3390/app132413024
APA StyleTiberti, W., Civino, R., Gavioli, N., Pugliese, M., & Santucci, F. (2023). A Hybrid-Cryptography Engine for Securing Intra-Vehicle Communications. Applied Sciences, 13(24), 13024. https://doi.org/10.3390/app132413024