
A Strategy for Integrated Multi-Demands High-Performance Motion Planning Based on Nonlinear MPC


Abstract
:1. Introduction
2. Problem Description
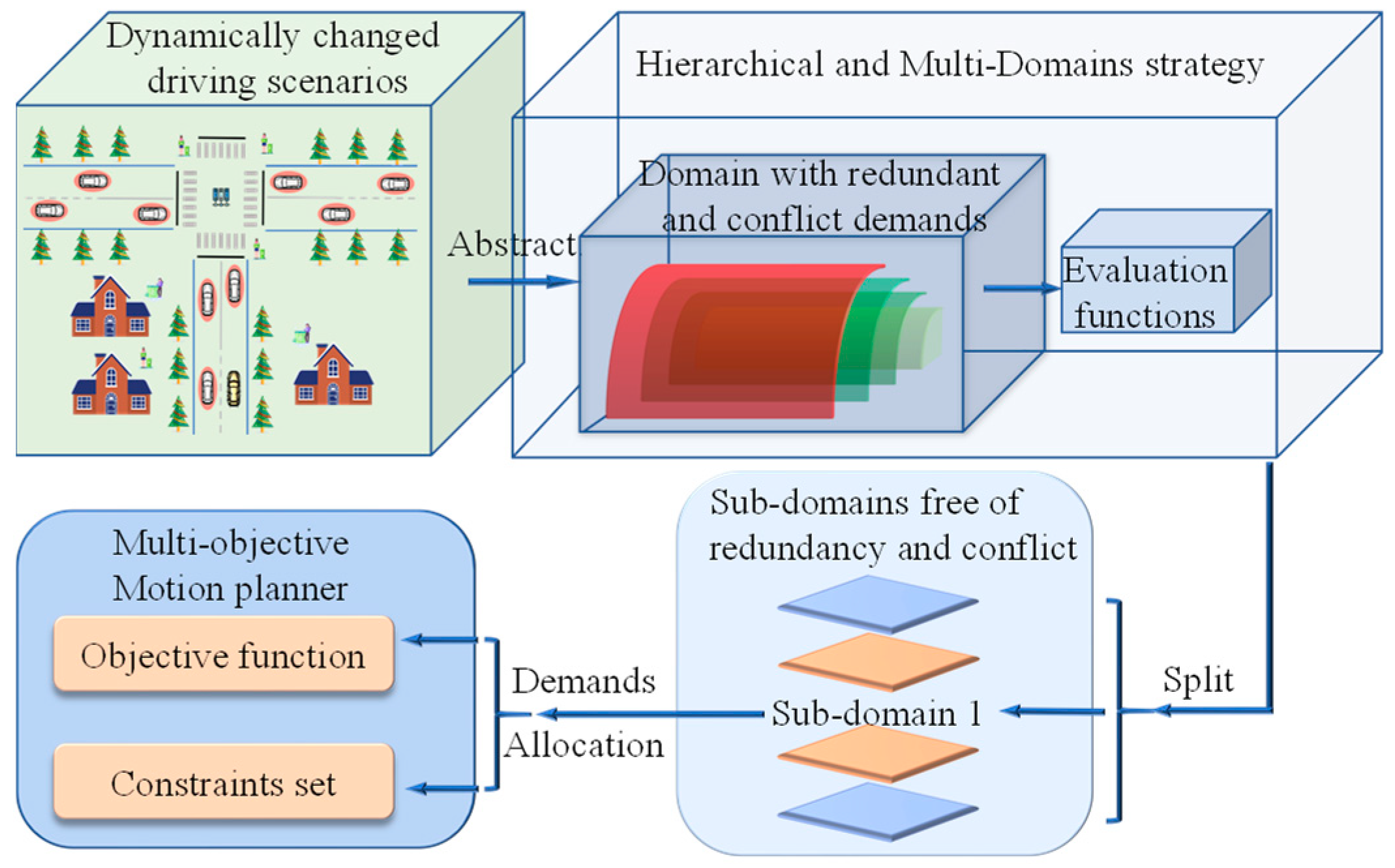
3. Hierarchical and Multi-Domains Strategy Based on Driving Demands
3.1. HMD Strategy
3.2. Evaluation Functions of Driving Demands
3.2.1. Dynamic Stability
3.2.2. Collision Avoidance
3.2.3. Traffic Rules
3.3. Design of Constraints Set and Objective Function
4. Simulation Validation and Analysis
4.1. Planner Formulation
4.2. Scenario 1
4.3. Scenario 2
4.4. Scenario 3
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, X.; Liu, X.; Liu, Z.; Shi, R.; Ma, X. A Solar-powered Bus Charging Infrastructure Location Problem under Charging Service Degradation. Transp. Res. Part D Transp. Environ. 2023, 119, 103770. [Google Scholar] [CrossRef]
- Liu, X.; Qu, X.; Ma, X. Optimizing electric bus charging infrastructure considering power matching and seasonality. Transp. Res. Part D Transp. Environ. 2021, 100, 103057. [Google Scholar] [CrossRef]
- Yan, H.; Ma, X.; Pu, Z. Learning Dynamic and Hierarchical Traffic Spatiotemporal Features with Transformer. IEEE Trans. Intell. Transp. Syst. 2022, 23, 2236–22399. [Google Scholar] [CrossRef]
- Gao, F.; Han, Y.; Li, S.E.; Xu, S.; Dang, D. Accurate Pseudospectral Optimization of Nonlinear Model Predictive Control for High-performance Motion Planning. IEEE Trans. Intell. Veh. 2023, 8, 1034–1045. [Google Scholar] [CrossRef]
- Guan, Y.; Ren, Y.; Sun, Q.; Li, S.E.; Ma, H.; Duan, J.; Cheng, B. Integrated Decision and Control: Toward Interpretable and Computationally Efficient Driving Intelligence. IEEE Trans. Cybern. 2023, 53, 859–873. [Google Scholar] [CrossRef] [PubMed]
- Feng, G.; Dang, D.; He, Y. Robust Coordinated Control of Nonlinear Heterogeneous Platoon Interacted by Uncertain Topology. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4982–4992. [Google Scholar] [CrossRef]
- Wu, P.; Gao, F.; Li, K. Humanlike Decision and Motion Planning for Lane Change Based on Artificial Potential Field. IEEE Access 2022, 10, 4359–4373. [Google Scholar] [CrossRef]
- Dang, D.; Gao, F.; Hu, Q. Motion Planning for Autonomous Vehicles Considering Longitudinal and Lateral Dynamics Coupling. Appl. Sci. 2020, 10, 3180. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Pu, Z.; Hu, J.; Wang, X.; Ke, R. Safe, Efficient, and Comfortable Velocity Control Based on Reinforcement Learning for Autonomous Driving. Transp. Res. Part C Emerg. Technol. 2020, 117, 102662. [Google Scholar] [CrossRef]
- Mynuddin, M.; Gao, W. Distributed Predictive Cruise Control Based on Reinforcement Learning and Validation on Microscopic Traffic Simulation. IET Intell. Transp. Syst. 2020, 14, 270–277. [Google Scholar] [CrossRef]
- Lin, Y.; McPhee, J.; Azad, N.L. Anti-Jerk On-Ramp Merging Using Deep Reinforcement Learning. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 19 October–13 November 2020. [Google Scholar] [CrossRef]
- Xu, X.; Zuo, L.; Li, X.; Qian, L.; Ren, J.; Sun, Z. A Reinforcement Learning Approach to Autonomous Decision Making of Intelligent Vehicles on Highways. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 3884–3897. [Google Scholar] [CrossRef]
- Vamplew, P.; Dazeley, R.; Berry, A.; Issabekov, R.; Dekker, E. Empirical Evaluation Methods for Multiobjective Reinforcement Learning Algorithms. Mach. Learn. 2011, 84, 51–80. [Google Scholar] [CrossRef]
- Li, S.; Li, K.; Rajamani, R.; Wang, J. Model Predictive Multi-Objective Vehicular Adaptive Cruise Control. IEEE Trans. Control Syst. Technol. 2011, 19, 556–566. [Google Scholar] [CrossRef]
- Funke, J.; Brown, M.; Erlien, S.M.; Gerdes, J.C. Collision Avoidance and Stabilization for Autonomous Vehicles in Emergency Scenarios. IEEE Trans. Control Syst. Technol. 2017, 25, 1204–1216. [Google Scholar] [CrossRef]
- Erlien, S.M.; Fujita, S.; Gerdes, J.C. Shared Steering Control Using Safe Envelopes for Obstacle Avoidance and Vehicle Stability. IEEE Trans. Intell. Transp. Syst. 2016, 17, 441–451. [Google Scholar] [CrossRef]
- Brown, M.; Funke, J.; Erlien, S.; Gerdes, J.C. Safe Driving Envelopes for Path Tracking in Autonomous Vehicles. Control Eng. Pract. 2017, 61, 307–316. [Google Scholar] [CrossRef]
- Wang, H.; Huang, Y.; Khajepour, A.; Zhang, Y.; Rasekhipour, Y.; Cao, D. Crash Mitigation in Motion Planning for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3313–3323. [Google Scholar] [CrossRef]
- Dixit, S.; Montanaro, U.; Dianati, M.; Oxtoby, D.; Mizutani, T.; Mouzakitis, A. Fallah Trajectory Planning for Autonomous High-Speed Overtaking in Structured Environments Using Robust MPC. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2310–2323. [Google Scholar] [CrossRef]
- Weiskircher, T.; Wang, Q.; Ayalew, B. Predictive Guidance and Control Framework for (Semi-)Autonomous Vehicles in Public Traffic. IEEE Trans. Control Syst. Technol. 2017, 25, 2034–2046. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Mukai, M.; Murata, J.; Kawabe, T. On Board Eco-Driving System for Varying Road-Traffic Environments Using Model Predictive Control. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010. [Google Scholar]
- Beal, C.E.; Gerdes, J.C. Model Predictive Control for Vehicle Stabilization at the Limits of Handling. IEEE Trans. Control Syst. Technol. 2013, 21, 1258–1269. [Google Scholar] [CrossRef]
- Gao, F.; Hu, Q.; Ma, J.; Han, X. A Simplified Vehicle Dynamics Model for Motion Planner Designed by Nonlinear Model Predictive Control. Appl. Sci. 2021, 11, 9887. [Google Scholar] [CrossRef]
- Mammar, S.; Glaser, S.; Netto, M. Time to Line Crossing for Lane Departure Avoidance: A Theoretical Study and An Experimental Setting. IEEE Trans. Intell. Transp. Syst. 2006, 7, 226–241. [Google Scholar] [CrossRef]
- Duan, J.; Gao, F.; He, Y. Test Scenario Generation and Optimization Technology for Intelligent Driving Systems. IEEE Intell. Transp. Syst. Mag. 2022, 14, 115–127. [Google Scholar] [CrossRef]
- Gao, F.; Han, Z.; Zhou, J.; Yang, Y. Performance Limit Evaluation by Evolution Test with Application to Automatic Parking System. IEEE Trans. Intell. Veh. 2023, 8, 3096–3105. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 20 | |||
| 5 | |||
| 4 | 1 | ||
| 3 | 100 | ||
| 0.8 | E | 0.7422 |
| Parameter | Symbols of Evaluation Functions | |||
|---|---|---|---|---|
| (s) | 1 | 4 | 3 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Y.; Ma, X.; Wang, B.; Zhang, H.; Zhang, Q.; Chen, G. A Strategy for Integrated Multi-Demands High-Performance Motion Planning Based on Nonlinear MPC. Appl. Sci. 2023, 13, 12443. https://doi.org/10.3390/app132212443
Han Y, Ma X, Wang B, Zhang H, Zhang Q, Chen G. A Strategy for Integrated Multi-Demands High-Performance Motion Planning Based on Nonlinear MPC. Applied Sciences. 2023; 13(22):12443. https://doi.org/10.3390/app132212443
Chicago/Turabian StyleHan, Yu, Xiaolei Ma, Bo Wang, Hongwang Zhang, Qiuxia Zhang, and Gang Chen. 2023. "A Strategy for Integrated Multi-Demands High-Performance Motion Planning Based on Nonlinear MPC" Applied Sciences 13, no. 22: 12443. https://doi.org/10.3390/app132212443
APA StyleHan, Y., Ma, X., Wang, B., Zhang, H., Zhang, Q., & Chen, G. (2023). A Strategy for Integrated Multi-Demands High-Performance Motion Planning Based on Nonlinear MPC. Applied Sciences, 13(22), 12443. https://doi.org/10.3390/app132212443