
Impedance-Based Stability Analysis of Grid-Connected Inverters under the Unbalanced Grid Condition

Abstract
:1. Introduction
- (1)
- The frequency-coupled impedance models of the DSOGI-PLL-based inverter under the balanced and unbalanced grid conditions are derived. This provides the theoretical basis for the analysis of the impedance characteristics and stability of the DSOGI-PLL-based inverter.
- (2)
- Based on the GNC and matrix theory, the stability analysis of high-order systems is transformed into the analysis of eigenvalues of two second-order matrices, which simplifies the stability analysis process of high-order systems.
- (3)
- The influences of pivotal parameters on the stability of the DSOGI-PLL-based grid-connected inverter system are comprehensively investigated. The analysis results provide the theoretical basis for the parameter design of the DSOGI-PLL-based inverter.
2. Impedance Modeling of the DSOGI-PLL-Based Inverter and Verification
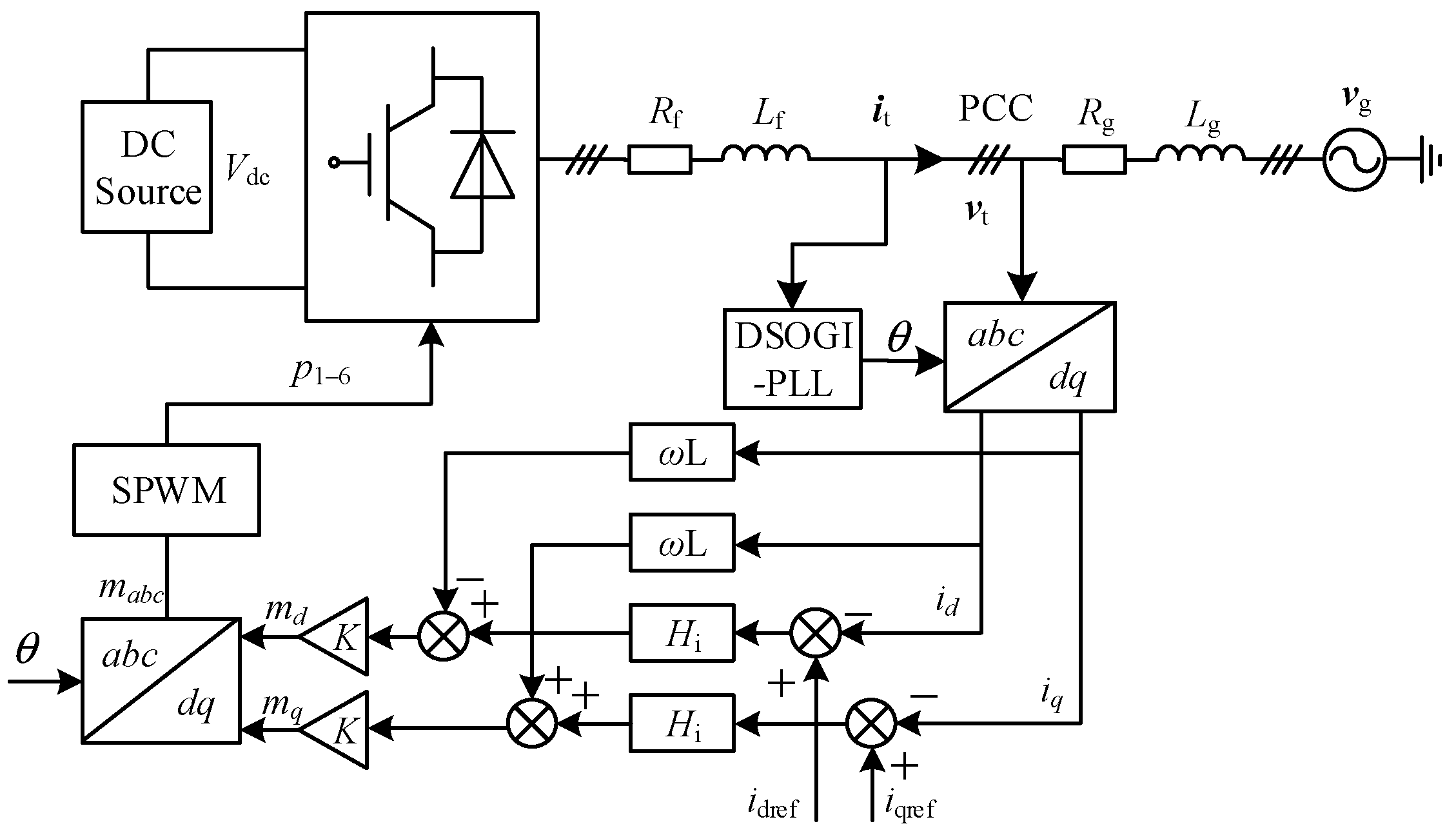
2.1. The Structure of the DSOGI-PLL-Based Grid-Connected Inverter
2.2. Impedance Modeling under the Three-Phase Balanced Condition
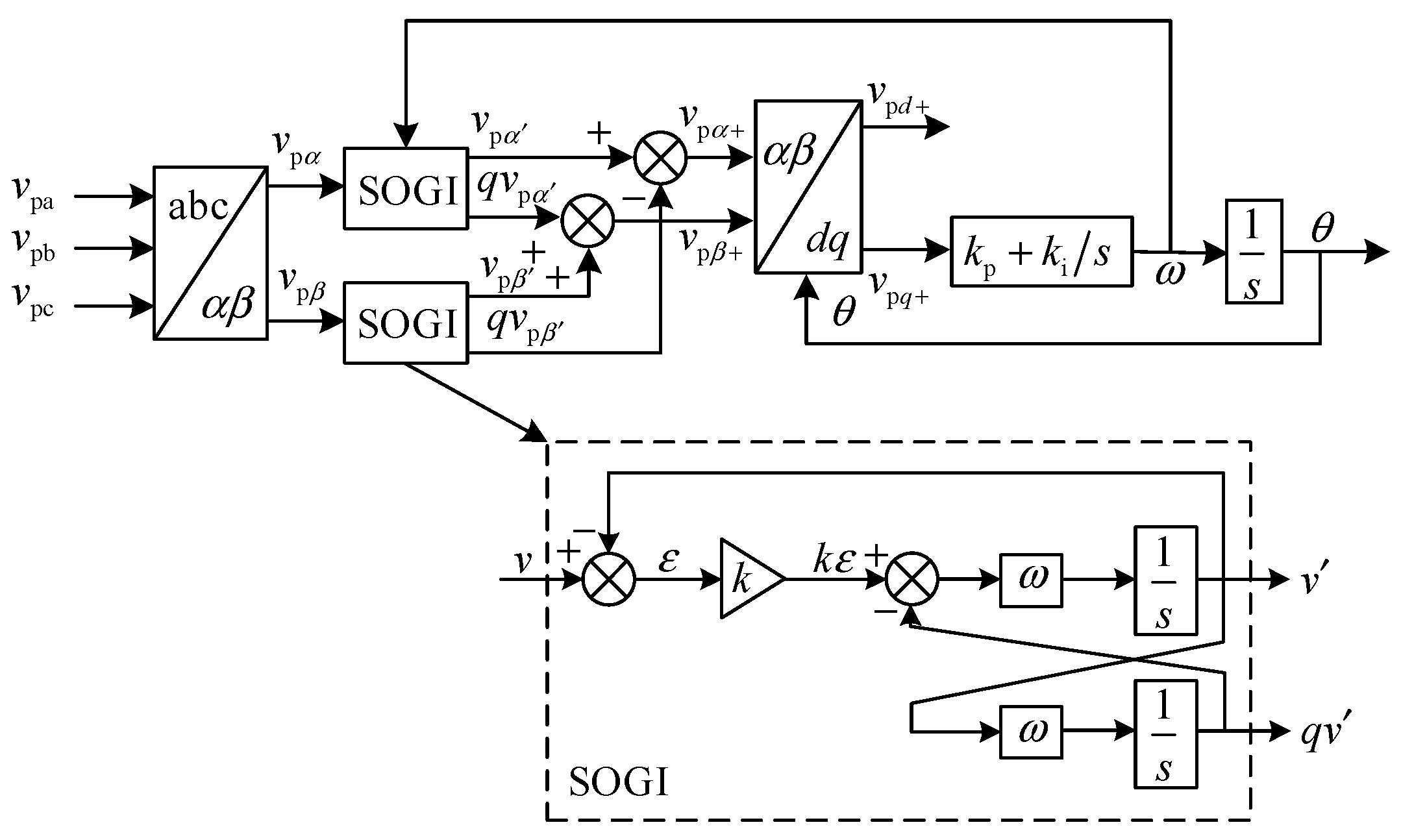
2.2.1. DSOGI-PLL
2.2.2. Park Transformation
2.2.3. Inner Current Loop
2.2.4. Inverse Park Transformation
2.2.5. Modulation
2.2.6. Impedance Model of the Inverter under the Balanced Condition
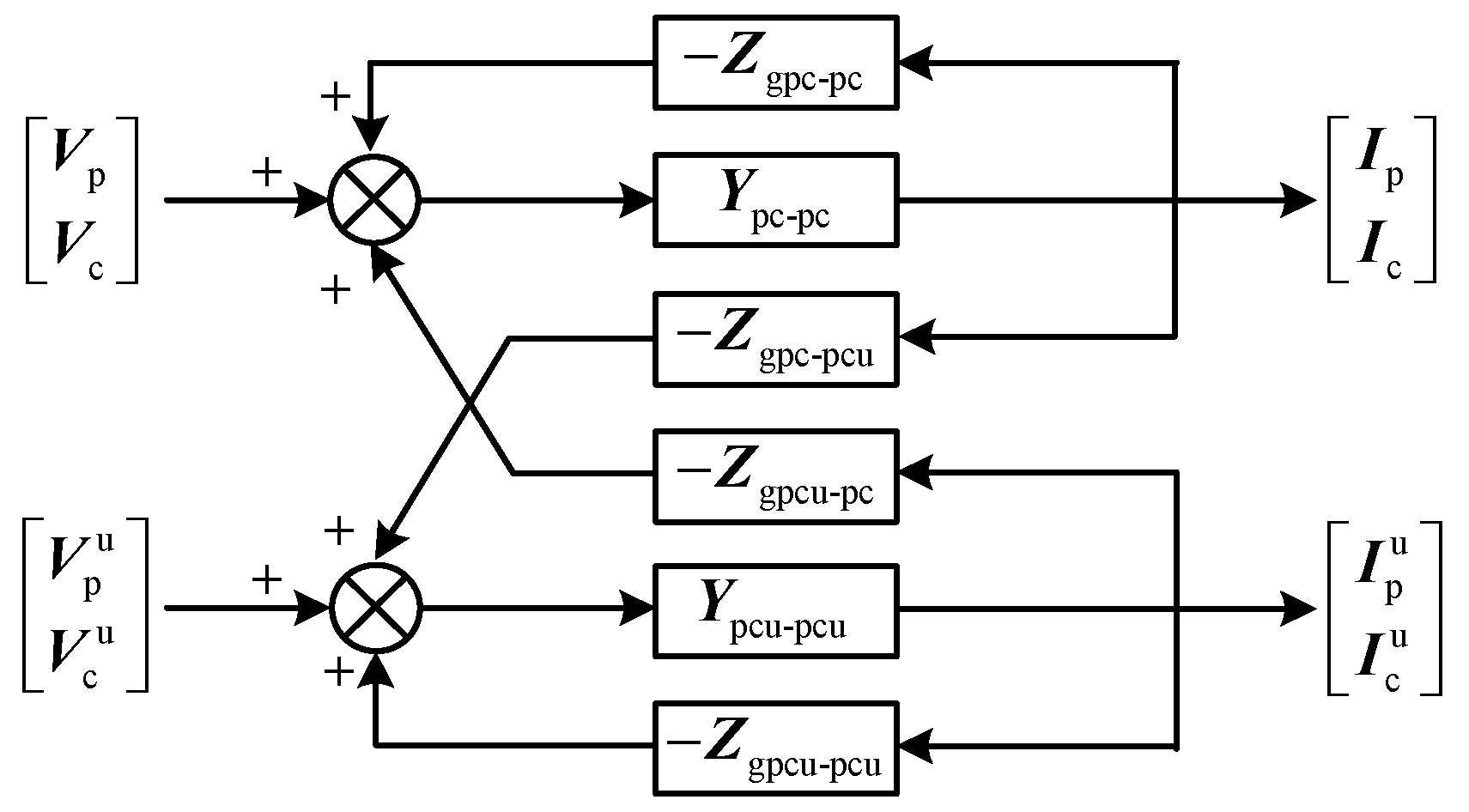
2.3. Impedance Modeling under the Three-Phase Unbalanced Condition
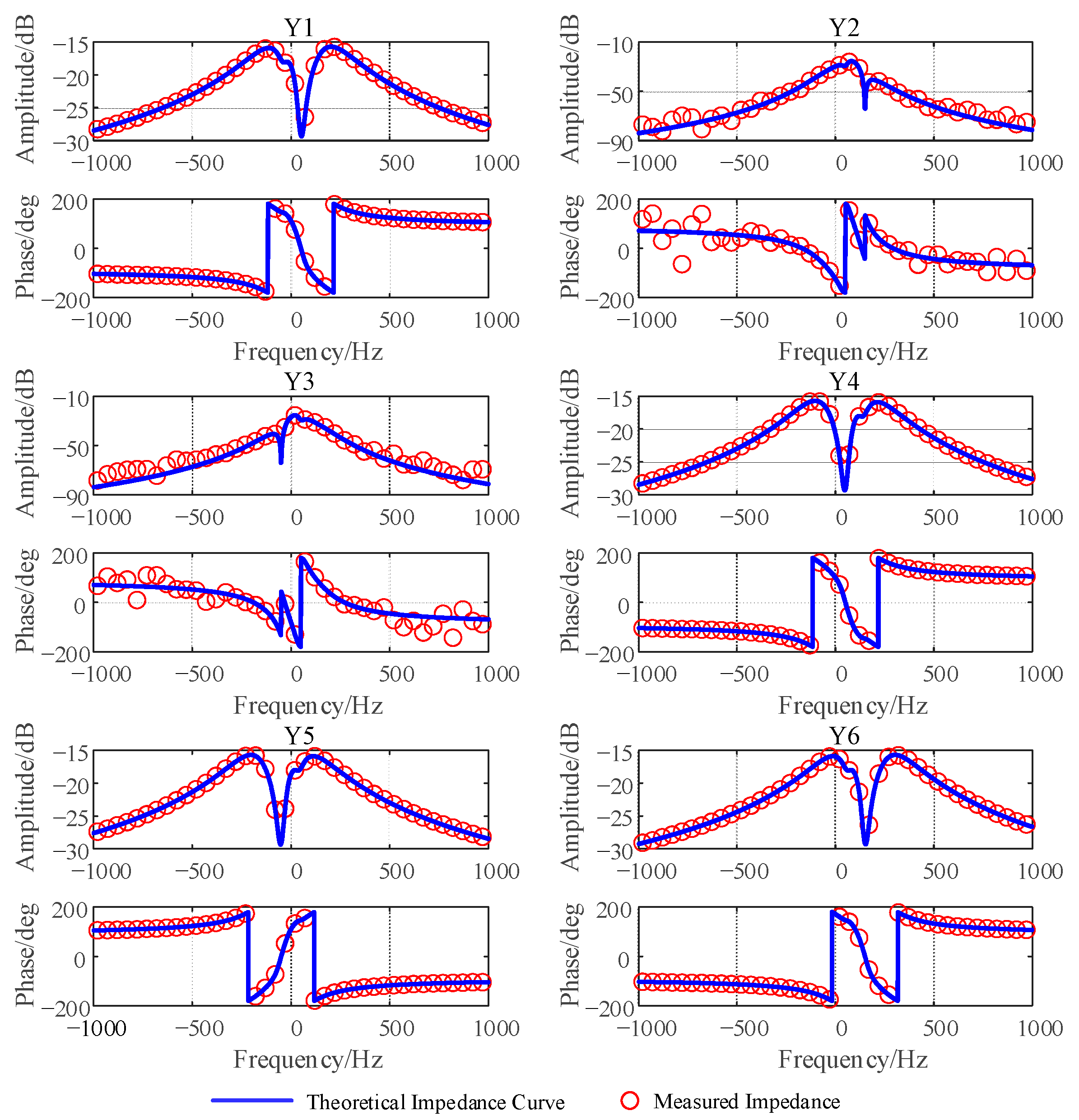
2.4. Simulation Verification of the Impedance Model
3. The Simplified Stability Analysis Method Based on the GNC and Verification
3.1. Stability Analysis Method of Inverters under the Balanced Grid Condition
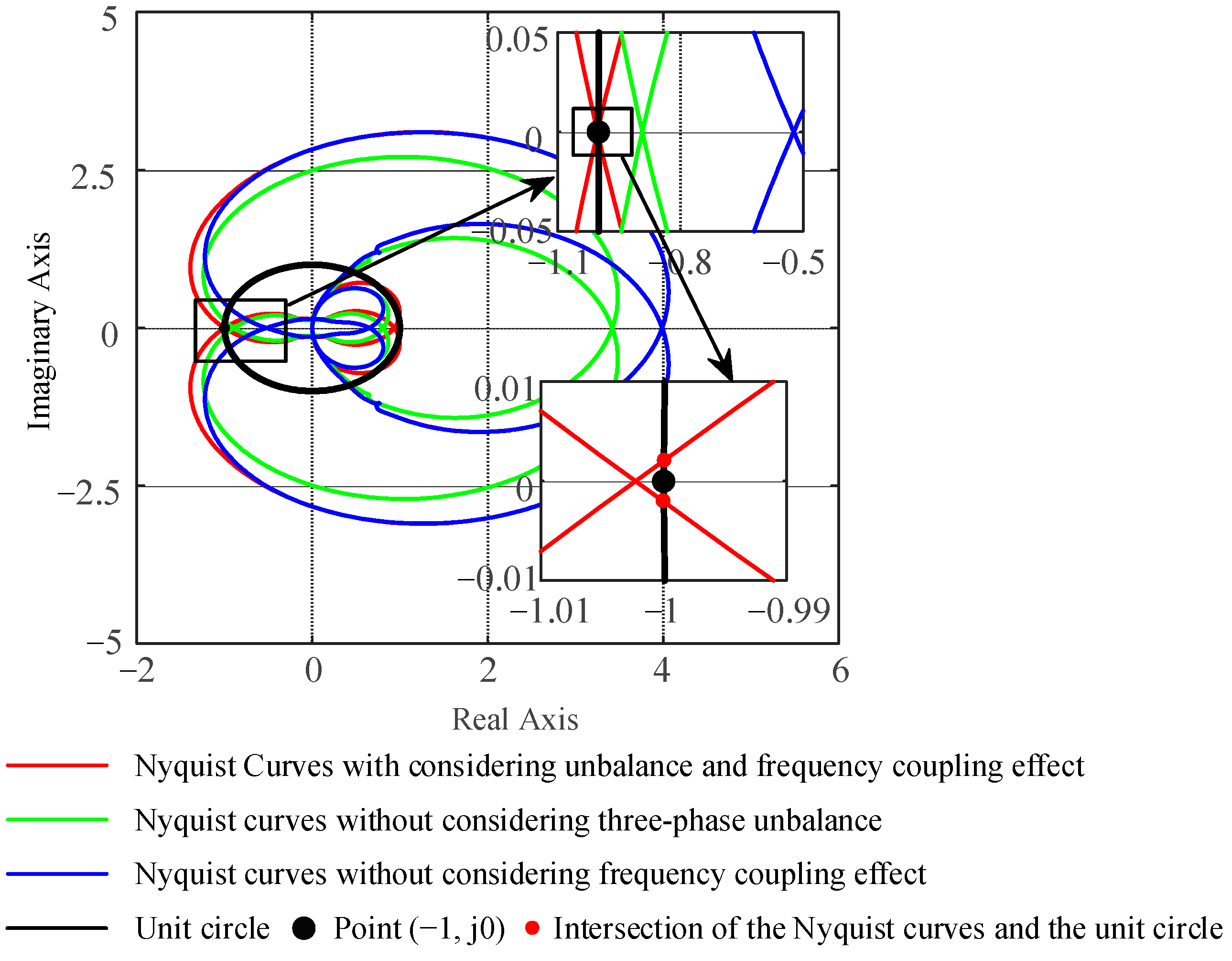
3.2. Stability Analysis Method of Inverters under the Unbalanced Grid Condition
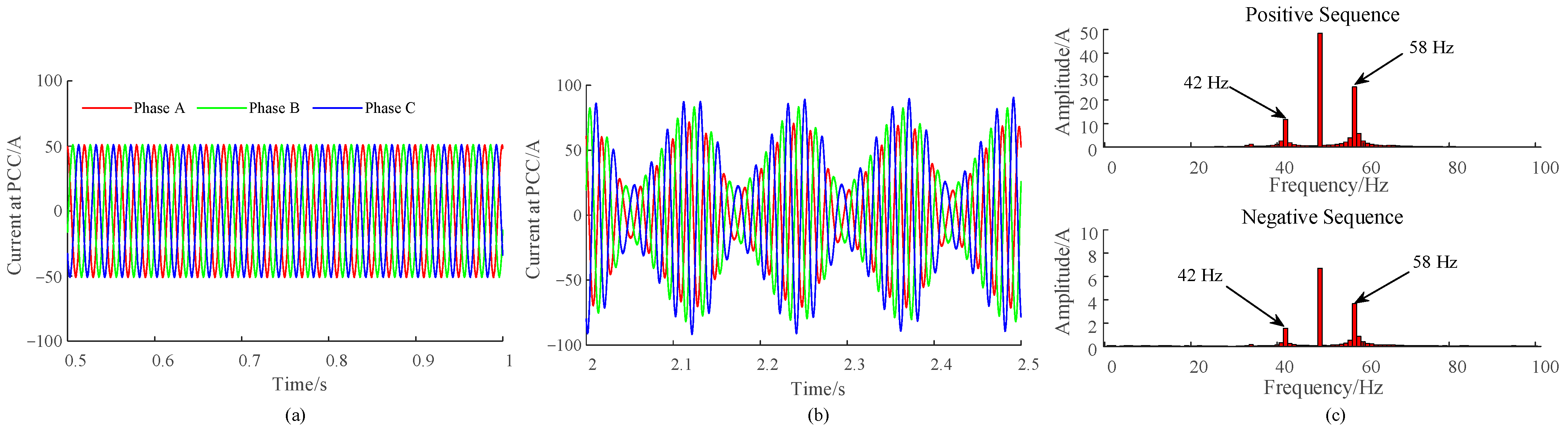
3.3. Simulation Verification of the Stability Analysis Results
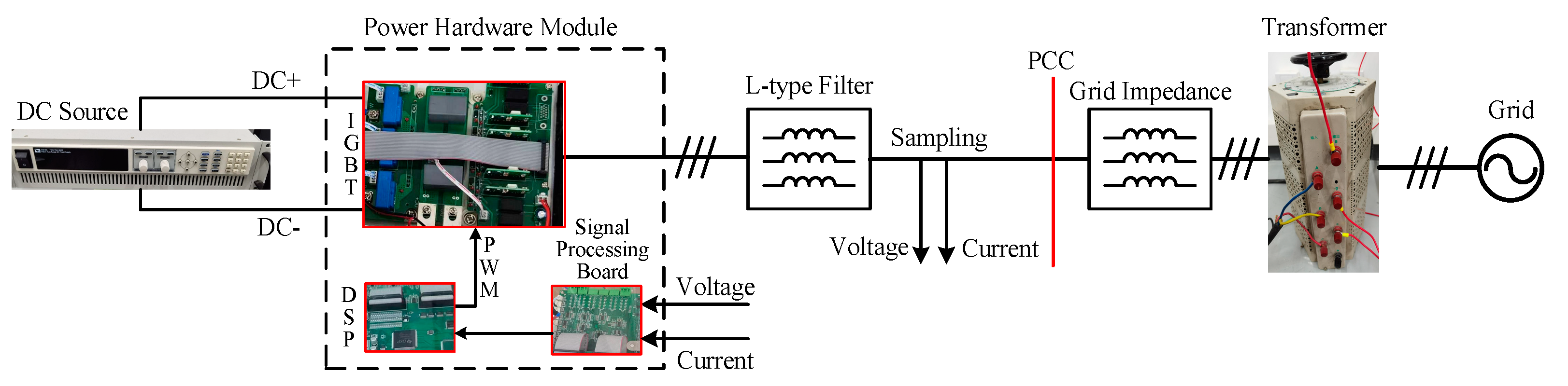
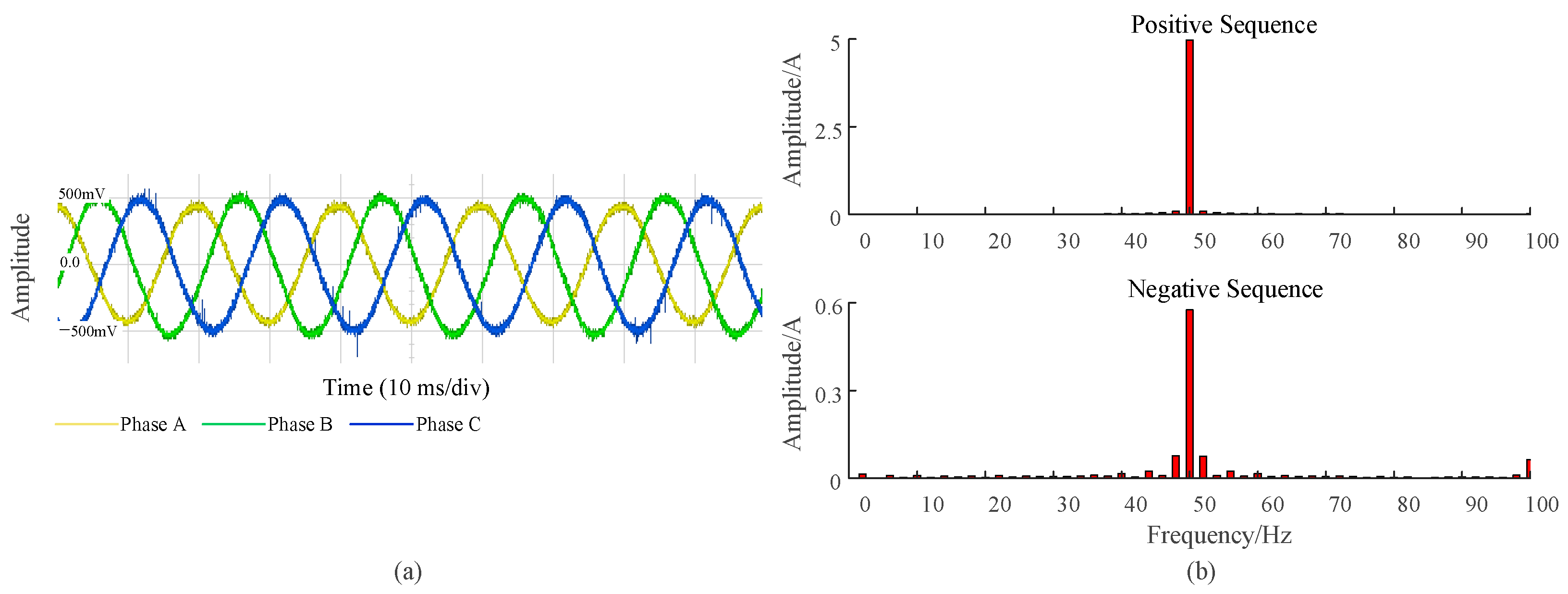
3.4. Experimental Verification of the Stability Analysis Results
4. Analysis of the Influence of Vital System Parameters on System Stability
4.1. Influence of the Asymmetric Grid Impedance on the System Stability
4.2. Influence of the Control Parameter on System Stability
4.3. Recommendations for Parameter Design
- (1)
- As analyzed in Section 4.1, the stability margin of the inverter is smaller under greater grid impedance unbalance. Therefore, for a inverter that may work under the unbalanced grid condition, the parameter design should be more conservative.
- (2)
- For a inverter under the unbalanced grid condition, the current loop bandwidth should be larger than that under the balanced grid condition. However, a larger current bandwidth may introduce oscillation problems at medium and high frequencies. Therefore, the setting of the current loop bandwidth should be considered to satisfy the stability margin requirement within a wide frequency band.
- (3)
- According to the analysis results in Section 4.2, it can be concluded that dynamic performance cannot only be pursued when designing the DSOGI-PLL of the grid-connected inverter system. It is necessary to appropriately reduce the damping coefficient and control bandwidth of the PLL to improve the stability of the whole grid-connected system.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kojima, H.; Nagasawa, K.; Todoroki, N.; Ito, Y.; Matsui, T.; Nakajima, R. Influence of renewable energy power fluctuations on water electrolysis for green hydrogen production. Int. J. Hydrogen Energy 2023, 12, 4572–4593. [Google Scholar] [CrossRef]
- Ghasemi, M.A.; Zarei, S.F.; Sohrabi, Z.; Blaabjerg, F.; Peyghami, S. An Observer-Based Current Sensor-Less Control Scheme for Grid-Following Converters. Appl. Sci. 2022, 12, 7749. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, X.; Hu, J.; Zhou, P.; Wang, D. DC-Bus voltage control stability affected by AC-bus voltage control in VSCs connected to weak AC grids. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 2, 445–458. [Google Scholar] [CrossRef]
- Saha, S.; Saleem, M.I.; Roy, T.K. Impact of high penetration of renewable energy sources on grid frequency behaviour. Int. J. Electr. Power Energy Syst. 2023, 145, 108701. [Google Scholar] [CrossRef]
- Meraj, S.T.; Yu, S.S.; Rahman, S.; Hasan, K.; Lipu, M.H.; Trinh, H. Energy management schemes, challenges and impacts of emerging inverter technology for renewable energy integration towards grid decarbonization. J. Clean. Prod. 2023, 405, 137002. [Google Scholar] [CrossRef]
- Adib, A.; Mirafzal, B.; Wang, X.; Blaabjerg, F. On Stability of Voltage Source Inverters in Weak Grids. IEEE Access 2018, 6, 4427–4439. [Google Scholar] [CrossRef]
- Rolán, A.; Bogarra, S.; Bakkar, M. Integration of Distributed Energy Resources to Unbalanced Grids Under Voltage Sags with Grid Code Compliance. IEEE Trans. Smart Grid 2022, 1, 355–366. [Google Scholar] [CrossRef]
- Nian, H.; Yang, H. Impedance modeling and stability analysis of grid-connected inverters under unbalanced operation conditions. Autom. Control. Electr. Power Syst. 2016, 10, 76–83. [Google Scholar]
- Yoon, S.-J.; Tran, T.V.; Kim, K.-H. Stability Assessment of Current Controller with Harmonic Compensator for LCL-Filtered Grid-Connected Inverter under Distorted Weak Grid. Appl. Sci. 2021, 11, 212. [Google Scholar] [CrossRef]
- Harnefors, L.; Wang, X.; Yepes, A.G.; Blaabjerg, F. Passivity-based stability assessment of grid-connected VSCs—An overview. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 1, 116–125. [Google Scholar] [CrossRef]
- Alenius, H.; Roinila, T.; Luhtala, R.; Messo, T.; Burstein, A.; de Jong, E.; Fabian, A. Hardware-in-the-Loop Methods for Stability Analysis of Multiple Parallel Inverters in Three-Phase AC Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 6, 7149–7158. [Google Scholar] [CrossRef]
- Sajadi, A.; Rañola, J.A.; Kenyon, R.W.; Hodge, B.-M.; Mather, B. Dynamics and Stability of Power Systems with High Shares of Grid-Following Inverter-Based Resources: A Tutorial. IEEE Access 2023, 11, 29591–29613. [Google Scholar] [CrossRef]
- Mohammadi, F.D.; Vanashi, H.K.; Feliachi, A. State-Space Modeling, Analysis, and Distributed Secondary Frequency Control of Isolated Microgrids. IEEE Trans. Energy Convers. 2018, 1, 155–165. [Google Scholar] [CrossRef]
- Zhu, Y.; Gu, Y.; Li, Y.; Green, T.C. Participation Analysis in Impedance Models: The Grey-Box Approach for Power System Stability. IEEE Trans. Power Syst. 2022, 1, 343–353. [Google Scholar] [CrossRef]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 11, 3075–3078. [Google Scholar] [CrossRef]
- Shah, S.; Koralewicz, P.; Gevorgian, V.; Wallen, R. Sequence Impedance Measurement of Utility-Scale Wind Turbines and Inverters—Reference Frame, Frequency Coupling, and MIMO/SISO Forms. IEEE Trans. Energy Convers. 2022, 1, 75–86. [Google Scholar] [CrossRef]
- Babu, Y.N.; Padhy, N.P. Investigation of Damping Effect of PLL on Low-Frequency Harmonic Stability of Grid-Tied Inverter With αβ and dq Current Control Schemes. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 1, 1046–1060. [Google Scholar] [CrossRef]
- Song, Y.; Wu, S. Research on Low-Frequency Oscillation Damping Control of Wind Storage System Based on Pareto and Improved Particle Swarm Algorithm. Appl. Sci. 2023, 13, 10054. [Google Scholar] [CrossRef]
- Mohammed, N.; Zhou, W.; Bahrani, B. Double-Synchronous-Reference-Frame-Based Power-Synchronized PLL-Less Grid-Following Inverters for Unbalanced Grid Faults. IEEE Open J. Power Electron. 2023, 4, 474–486. [Google Scholar] [CrossRef]
- Bakhshizadeh, M.K.; Wang, X.; Blaabjerg, F.; Hjerrild, J.; Kocewiak, Ł.; Bak, C.L.; Hesselbæk, B. Couplings in Phase Domain Impedance Modeling of Grid-Connected Converters. IEEE Trans. Power Electron. 2016, 10, 6792–6796. [Google Scholar]
- Wang, X.; Blaabjerg, F. Harmonic stability in power electronic-based power systems: Concept, modeling, and analysis. IEEE Trans. Smart Grid 2019, 3, 2858–2870. [Google Scholar] [CrossRef]
- Cecati, F.; Becker, J.K.M.; Pugliese, S.; Zuo, Y.; Liserre, M.; Paolone, M. LTP Modeling and Analysis of Frequency Coupling in PLL-Synchronized Converters for Harmonic Power Flow Studies. IEEE Trans. Smart Grid 2023, 4, 2890–2902. [Google Scholar] [CrossRef]
- Nian, H.; Xu, Y.; Chen, L.; Li, G. Frequency coupling characteristic modeling of grid-connected inverter and system stability analysis. Proc. CSEE 2019, 5, 1421–1431. [Google Scholar]
- Huang, L.; Wu, C.; Zhou, D.; Blaabjerg, F. A Double-PLLs-Based Impedance Reshaping Method for Extending Stability Range of Grid-Following Inverter Under Weak Grid. IEEE Trans. Power Electron. 2022, 4, 4091–4104. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, S.; Yan, Z.; Wei, Y.; Hu, X. A Novel Phase-Locked Loop Structure to Enhance Converter Stability in Weak Grids. IEEE Trans. Power Electron. 2023, 11, 13855–13865. [Google Scholar] [CrossRef]
- Nian, H.; Hu, B.; Xu, Y.; Wu, C.; Chen, L.; Blaabjerg, F. Analysis and Reshaping on Impedance Characteristic of DFIG System Based on Symmetrical PLL. IEEE Trans. Power Electron. 2020, 11, 11720–11730. [Google Scholar] [CrossRef]
- Arya, S.R.; Patel, M.M.; Alam, S.J.; Srikakolapu, J.; Giri, A.K. Phase lock loop–based algorithms for DSTATCOM to mitigate load created power quality problems. Int. Trans. Electr. Energ. Syst. 2020, 30, e12161. [Google Scholar] [CrossRef]
- Yang, H.; Eggers, M.; Teske, P.; Dieckerhoff, S. Comparative Stability Analysis and Improvement of Grid-Following Converters Using Novel Interpretation of Linear Time-Periodic Theory. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 6, 7049–7061. [Google Scholar] [CrossRef]
- Céspedes, M.; Sun, J. Methods for stability analysis of unbalanced three-phase systems. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 3090–3097. [Google Scholar]
- Liu, W.; Wang, X.; Blaabjerg, F. Modeling of unbalanced three-phase grid-connected converters with decoupled transfer functions. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 3164–3169. [Google Scholar]
- Ugalde-Loo, C.E.; Acha, E.; Licéaga-Castro, E. Analysis of the damping characteristics of two power electronics-based devices using ‘individual channel analysis and design. Appl. Math. Model. 2018, 59, 527–545. [Google Scholar] [CrossRef]
- Wu, W.; Liu, J.; Li, Y.; Blaabjerg, F. Individual channel design-based precise analysis and design for three-phase grid-tied inverter with LCL filter under unbalanced grid impedance. IEEE Trans. Power Electron. 2020, 5, 5381–5396. [Google Scholar] [CrossRef]
- Jin, W.; Li, Y.; Sun, G.; Chen, X.; Gao, Y. Stability analysis method for three-phase multi-functional grid-connected inverters with unbalanced local loads considering the active imbalance compensation. IEEE Access 2018, 6, 54865–54875. [Google Scholar] [CrossRef]
- Zhang, H.; Harnefors, L.; Wang, X.; Gong, H.; Hasler, J. Stability analysis of grid-connected voltage-source converters using SISO modeling. IEEE Trans. Power Electron. 2019, 8, 8104–8117. [Google Scholar] [CrossRef]
- Zhang, C.; Molinas, M.; Rygg, A.; Lyu, J.; Cai, X. Harmonic transfer function-based impedance modeling of a three-phase VSC for asymmetric ac grid stability analysis. IEEE Trans. Power Electron. 2019, 12, 12552–12566. [Google Scholar] [CrossRef]
- Yang, C.; Xin, H.; Gong, Z.; Dong, W.; Jyu, P.; Xu, L. Complex circuit analysis and investigation on applicability of generalized-impedance-based stability criterion for grid-connected converter. Proc. CSEE 2020, 15, 4744–4757. [Google Scholar]
- Liu, W.; Lu, Z.; Wang, X.; Xie, X. Frequency-coupled admittance modelling of grid-connected voltage source converters for the stability evaluation of subsynchronous interaction. IET Renew. Power Gener. 2018, 2, 285–295. [Google Scholar] [CrossRef]
- Jiang, C.; Shi, P.; Huang, W.; Zhou, J.; Gan, D. Parameter setting method for 26multi-band power system stabilizer considering multiple oscillation modes. Autom. Electr. Power Syst. 2020, 4, 142–149. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Grid voltage | 380 V | Grid frequency | 50 Hz |
| DC-link voltage | 800 V | Switching frequency | 10 kHz |
| Filter inductance | 4 mH | Filter resistance | 0.05 Ω |
| Damping coefficient | 1.414 | Grid inductance | 5 mH |
| Proportional gain of PLL controller | 0.7376 | Integral gain of PLL controller | 84.352 |
| Proportional gain of current controller | 6.47 | Integral gain of current controller | 4194 |
| d-axis current reference | 21.5 A | q-axis current reference | 0 A |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Grid voltage | 380 V | Grid frequency | 50 Hz |
| DC-link voltage | 800 V | Switching frequency | 10 kHz |
| Filter inductance | 1.5 mH | Filter resistance | 0.05 Ω |
| Damping coefficient | 1.414 | Grid inductance | 5 mH |
| Proportional gain of PLL controller | 0.278 | Integral gain of PLL controller | 11.99 |
| Proportional gain of current controller | 1.2 | Integral gain of current controller | 72.5 |
| d-axis current reference | 50 A | q-axis current reference | 0 A |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Grid voltage | 108 V | Grid frequency | 50 Hz |
| DC-link voltage | 300 V | Switching frequency | 10 kHz |
| Filter inductance | 2 mH | Filter resistance | 0.035 Ω |
| Damping coefficient | 1.414 | Grid inductance | 6 mH |
| Proportional gain of PLL controller | 1.1246 | Integral gain of PLL controller | 112.58 |
| Proportional gain of current controller | 4.317 | Integral gain of current controller | 4660 |
| d-axis current reference | 5 A | q-axis current reference | 0 A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Yang, L.; Yang, H. Impedance-Based Stability Analysis of Grid-Connected Inverters under the Unbalanced Grid Condition. Appl. Sci. 2023, 13, 12441. https://doi.org/10.3390/app132212441
Shi J, Yang L, Yang H. Impedance-Based Stability Analysis of Grid-Connected Inverters under the Unbalanced Grid Condition. Applied Sciences. 2023; 13(22):12441. https://doi.org/10.3390/app132212441
Chicago/Turabian StyleShi, Jinzhu, Lihui Yang, and Hao Yang. 2023. "Impedance-Based Stability Analysis of Grid-Connected Inverters under the Unbalanced Grid Condition" Applied Sciences 13, no. 22: 12441. https://doi.org/10.3390/app132212441
APA StyleShi, J., Yang, L., & Yang, H. (2023). Impedance-Based Stability Analysis of Grid-Connected Inverters under the Unbalanced Grid Condition. Applied Sciences, 13(22), 12441. https://doi.org/10.3390/app132212441