Abstract
The article briefly describes the importance of furrowing depth stability for seed germination and growth under precision seeding conditions. By analyzing the application status of furrowing depth control technology of the planter globally, the research method, technical characteristics, and development of furrowing depth stability control technology are reviewed from three key aspects, namely, profiling adjustment device, furrowing depth detection technology, and automatic control system. In this paper, (1) two types of profiling adjustments, active and passive, are described based on the difference in the downforce adjustment method; (2) three furrowing depth detection methods are described based on different sensors; (3) and three ways of regulating the furrowing depth system are summarized based on the different ways of evaluating the stability of furrowing depth. In addition, the characteristics and application requirements of global furrow depth control technology are summarized. It is proposed that the future planter should be developed in the direction of automatic navigation, automatic monitoring and evaluation of seeding quality, variable seeding, high-speed seeding, and other intelligent precision seeding techniques. The summary and outlook of this paper aim to promote the overall development of furrowing depth control technology.
1. Introduction
With the development of technologies such as global positioning systems, remote sensing, sensors, and geographic information systems, agricultural production demands higher-precision seeding technology to improve the quality of seeding operations and reduce the cost of machine operations [1,2,3]. In the 1940s, relevant foreign scholars began to study precision seeding technology. This technology is a critical technological innovation in modern agriculture through which seed spacing, row spacing, sowing depth, and density can be accurately controlled. This not only saves time and seeds and improves the quality of operations but also maximizes the productivity and quality of crops and reduces the waste of resources [4,5]. The final position of the seed under precision sowing is mainly the result of the combined work of certain components, such as the profiling device, the furrowing device, the seeding device, and the soil covering and compacting device. Any one of these affects the seed distribution in the soil, which in turn affects the seeding quality.
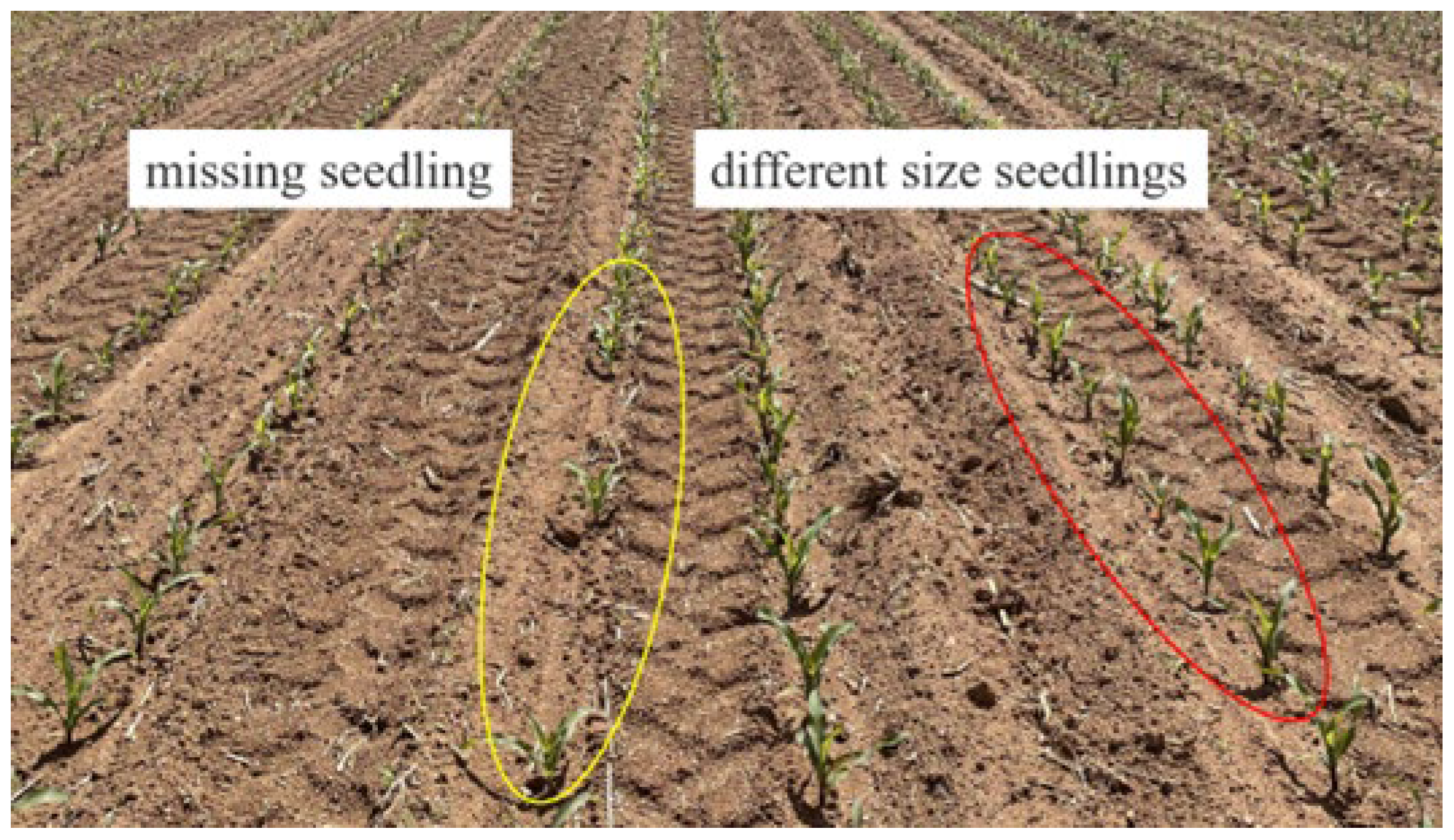
Sowing depth is a critical evaluation index of sowing quality, which is closely related to the soil condition and temperature level around the seed, and the sowing depth will directly affect the germination growth and development of the seed [6,7,8]. When the sowing depth is shallow, the water needed for crop growth is insufficient due to the limited water in the surface layer of the soil, and it is not easy to achieve the conditions needed for seed germination. When the sowing depth is deep, the water in the deep soil layer can meet the conditions for seed germination. However, it is difficult for the seeds to get enough oxygen, and it is difficult for the seeds to emerge from the soil after germination [9]. Inconsistency in sowing depths can result in seedling shortages (e.g., small seedlings), and reduced crop yields (Figure 1; Supplementary Table S1) [10,11]. Ozmerzi et al. tested maize emergence at different sowing depths and found that maize emergence was best at 60 mm sowing depth [12]. Poncet et al. used a planter equipped with a passive downforce spring testing three different sowing depths and different downforce. They found that the planter failed to make sowing depths across the field uniform at the same downforce and predefined sowing depth, with a maximum sowing depth difference of 2.1 cm. This study also found that climatic conditions at different sowing depths and downforce affected maize emergence and yield. The lower temperature and the shallower sowing depth led to higher emergence [13,14]. In addition to seeding depth, downforce is also one of the important evaluation indexes of seeding quality [15]. Appropriate downforce ensures the seeds are in close contact with the soil and promotes germination and growth. Higher downforce may result in the seed being pressed tightly against the soil, affecting its germination quality. Smaller downforce may result in the seeds being not fully in contact with the soil [16,17]. Hanna et al. studied the growth of maize under different depth-limiting wheel pressures and found that the growth of maize plants is affected by the pressure under the depth-limiting wheel and soil moisture. Therefore, appropriate sowing depth and downforce are essential for seed emergence, maximizing competition among seedlings, improving seedling neatness, and increasing crop yields [18,19].

Figure 1.
Effect on corn seedling emergence at different sowing depths.
From the above studies, it is clear that proper seeding depth and downforce play an important role in increasing the yield of the crop. The profiling adjustment device mainly determines the downforce, and the downforce adjustment is an essential factor affecting the stability of the furrowing depth of the planter. Furrowing depth stability is the main factor affecting seeding depth [20]. Therefore, the ability of the furrowing device to consistently open the appropriate depth of furrows before sowing to provide the proper environment for seeds to germinate and grow is a critical factor in achieving precision sowing [21,22].
In summary, in recent years, with the development of sowing to high speed and precision, higher requirements have been put forward for the furrowing effect of the furrowing device. Experts in relevant fields have conducted many studies on the detection measurement and control technology of furrowing depth. Despite the rapid development of furrowing depth control technology, the development of furrowing depth control systems under complex field operation environments still needs to be improved. Therefore, it is of great significance for the development of precision seeding to sort out the development status of the furrowing depth control system under different operation forms, analyze its main problems, and look forward to its development [23]. The purpose of this study is to comprehensively review the existing literature on improving furrowing quality in terms of furrowing depth control and detection, to promote the comprehensive development of planter furrowing depth control technology, improve the quality of planter furrowing, and facilitate the rapid development of precision seeding in the direction of high speed and precision.
2. Data Collection
The peer-reviewed literature data were collected from papers published in China National Knowledge Infrastructure and Web of Science before September 2023. Search terms included “planter or seeder”, “furrow or ditch or trench or opener or profiling or limiting or wheel”, “device or design or mechanism or experiment”, and “depth or system or control or detection or adjustment or measurement or downforce”. The rest of the data came from the official websites of representative planter companies at home and abroad. To ensure the accuracy of the studies, only studies that met the following criteria were used in this review: (1) Relevant research in the literature relates to furrowing depth control and detection. (2) The studies in the relevant literature are representative. (3) The results obtained in the literature need to be verified by careful analysis or experimentation. Based on the above criteria, 91 references were obtained and analyzed.
3. Furrowing Depth Stability Control—Design of Profiling Adjustment Device
The profiling adjustment device is an integral part of the planter furrowing system. The seeder may have some problems during sowing, e.g., high pressure on the furrow opener and poor field conditions [24]. The profiling adjustment device can make the pulling force from the tractor act smoothly on the furrowing device and ensure that the furrow opener can maintain a certain furrowing depth with the changing terrain. The profiling adjustment device generally includes a parallel four-bar mechanism, depth-limiting wheel, and downforce adjustment device. The parallel four-bar mechanism and the depth-limiting wheel have the characteristics of simple structure, easy installation, and high stability, and can adapt to different types of soil and terrain conditions, ensuring that the furrow opener makes parallel movement within a specific range relative to the frame during the up-and-down profiling process [25]. The downforce adjustment device provides a constant downforce based on the ups and downs of the ground surface, ensuring consistent furrowing depth. Profiling adjustment devices can be categorized as passive or active depending on how the downforce regulator is driven [26,27]. The passive profiling adjusting device’s downforce adjusting device mainly adopts a mechanical spring, and the active profiling adjusting device’s downforce adjusting device mainly adopts a hydraulic drive and pneumatic drive, as shown in Table 1.

Table 1.
Common downforce control methods.
3.1. Passive Profiling Adjusting Device
The passive profiling adjustment device is mainly a mechanical spring installed on the parallel four-bar mechanism, which utilizes the depth-limiting wheel to limit the depth and perform passive profiling. Passive profiling adjustment devices are still commonly used in planters because of their low cost and stable operation. Current commonly used passive profiling planters are shown in Table 2. To improve the operational performance of the passive profiling adjustment device, scholars have carried out relevant research.
Table 2.
Common passive profiling planters.
3.1.1. Parallel Four-Bar Mechanism and Depth-Limiting Wheel
In order to improve the profiling effect of the parallel four-bar mechanism, Zhao and Jie et al. designed a bidirectional parallel four-bar profiling mechanism. It can realize left–right and up–down profiling of planter units, which improves the profiling effect of no-tillage seeders for uneven surfaces such as sloping cultivated land [36,37]. Shi et al. designed a forward speed compensation mechanism on a corn planter, the key component of which is a parallel four-bar mechanism that uses the guide rod for horizontal speed compensation. Based on theoretical analysis, the fundamental parameters affecting the stability of seeding depth are sub-crank length, main crank angular velocity, and center distance, and the experimental results show that the qualification rate of seeding depth of the device can reach 94.89% after optimization of critical parameters [38].
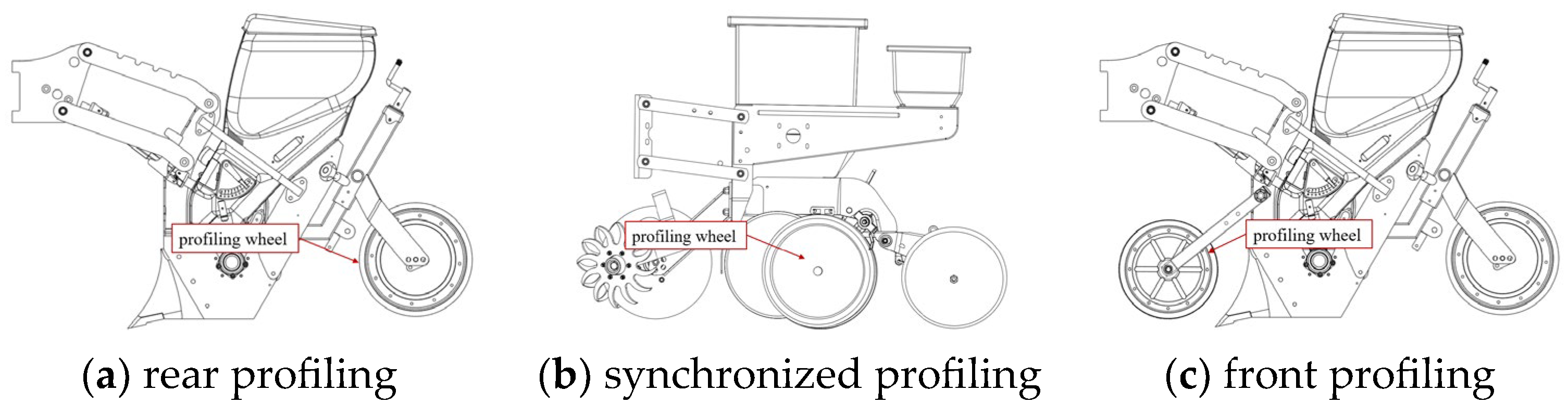
The profiling wheel rolls along the ground under the action of the parallel four-bar mechanism and the downforce adjusting device. Even in the undulating ground, it can still play the role of depth-limiting profiling. According to the different arrangement positions of the depth-limiting wheel, the profiling adjustment device can be divided into three types: front profiling, rear profiling, and synchronized profiling, as shown in Figure 2 [25].
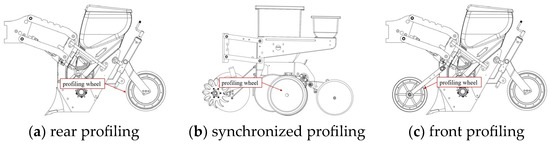
Figure 2.
Type of depth-limiting wheel arrangement.
The front profiling wheel is installed at the front end of the planter, and a soil covering and compacting device is usually installed at the rear. Xiang designed a narrow-row dense-planting soybean planter with front profiling and carried out force analysis and parameter optimization of the profiling mechanism to improve the stability of the profiling adjusting device for the depth of furrow opening on upward and downward slopes [39]. The MECAV4 series of precision planters from MONSEM in the United States installs a clod cleaner in front of the planter unit, which compacts the soil and controls the depth while clearing the clods and stones. The front position profiling reduces the width of the planter unit, and the planter unit has good passability [30]. However, the front position profiling mechanism is prone to the problem of profiling advancement, which affects the depth of furrow opening [40]. The rear position profiling wheel is mounted on the rear end of the planter, while the depth-limiting wheel can act as a compacting device. Nonghaha 2BYFSF-4 corn no-tillage fertilizer precision sowing machine is a model with more rear imitation application, which adopts a one-piece drive shaft, with ample transmission power and consistent rotational speed of rows of planter unit, which still does not affect the normal sowing in the case of skidding of a particular row of ground wheels [35]. The rear position imitation reduces the width and weight of the seeding unit, and the planter unit has good passability. However, the rear imitation mechanism is prone to imitation lag, which affects the depth of the furrow opening.
The most widely used profiling wheel arrangement is synchronized profiling. Synchronized profiling wheels are arranged on both sides of the furrow opener, which has a good synchronization effect and avoids profiling advancement or lagging. The John Deere 1775NT is one of the iconic synchronized profiling planters, capable of high-speed precision seeding in no-till situations [41]. Cui et al. designed a synchronized profiling semi-low-level seed casting planter. They used the analytical method to determine the optimal parameters for the profiling wheel’s diameter and the bracket’s length. The maximum range of planting depths from 40 mm to 90 mm was determined [40]. Arranging the profiling wheels on both sides of the furrow opener increases the transverse dimension of the touch-low part of the planting unit, which tends to cause clogging of the straw for no-till sowing and reduces the passing ability of the planting unit. In order to solve this problem, Zhang et al. designed a no-till corn planter controlled by a unilateral profiling wheel suitable for the North China Plain, which improved the passing ability of the no-till planter while realizing synchronized profiling and could adjust the furrow depth from 30 mm to 90 mm, and the experimental results showed that the stability of the sowing depth could reach 95.45% [42,43].
3.1.2. Mechanical Spring-Type Downforce Adjustment Device
Mechanical spring-type downforce adjustment devices usually have a mechanical spring mounted on a parallel four-bar mechanism and utilize a depth-limiting wheel to limit the depth, reducing the vibration of the planter monobloc and maintaining the furrowing depth’s stability [37]. Monosem, USA, has recently launched a fast planter, NG Plus M, which adopts Monosem’s Monoshox technology, installing monoblock shock absorbers and double mechanical springs, which can reduce the vibration amplitude when the planter travels at high speeds, reduce the degree range of the four-linkage, achieving smoother imitation. The stability of the furrowing depth is improved. Monoshox technology can increase the seeding speed of the planter to 13 km per hour and maintain a high degree of seeding stability [30]. Yang et al. designed a Panax notoginseng pressure wheel profiling furrowing device, which can realize transverse and longitudinal profiling, and determined through theoretical analysis that the best operation effect is achieved when the spring pre-tension reaches 211.90 N. The test results showed that the depth stability of the furrowing device after parameter optimization was 89.41% [44]. Lv et al. designed a potato seeding monolithic sowing depth regulating device, and the test results showed that when the operating speed was 1 m/s, the initial traction angle was 0. The spring stiffness was 10 N/mm, the operating effect was better, the potato seeding furrowing depth qualification rate reached 96.6%, and the coefficient of variation reached 8.9% [45]. The Australian John Shearer planter, with two spring bodies mounted on the furrow opener, can provide more than 1 kN of downforce, allowing the planter to achieve a good profiling furrow opening operation (John Shearer). Dai et al. designed a sowing depth profiling adjustment device for a twin-ridge cross-belt whole-film ridging corn planter, which can be freely rotated and adjusted to a sowing depth of up to 30–50 mm using a sowing depth profiling adjustment lever [46].
The passive profiling adjustment device is mainly a mechanical element with a simple structure and low cost. The nature of the soil varies considerably in different regions, fields, and surface undulation. In order to keep the profiling wheel in close contact with the ground at all times, the appropriate pressure on the ground is achieved by increasing or decreasing the number of springs or adjusting the spring preload before operation. Adjusting the height difference between the depth-limiting wheel and the furrow opener is also necessary. The machine is checked for proper operation using trial sowing [4]. However, this will significantly affect the sowing efficiency and increase labor costs. Passive adjusting devices cannot match the soil conditions very well; there are profiling advances or imitation lag and other problems, and it is difficult to ensure the consistency of the depth of the open furrow.
3.2. Active Profiling Adjusting Device
In order to improve the profiling effect of the profiling adjustment device, since the 1970s, agricultural machinery researchers have begun to develop active profiling adjustment devices. Active profiling adjusting device is mainly based on the passive profiling adjusting device, using hydraulic or pneumatic downforce adjusting device instead of mechanical spring-type downforce adjusting device, using assistant sensors to realize the active profiling adjusting of the furrower. Current commonly used active profiling planters are shown in Table 3.
Table 3.
Common active profiling planters.
3.2.1. Hydraulically Driven Downforce Adjustment Device
Hydraulically driven downward pressure adjustment device mainly utilizes a hydraulic device instead of a mechanical spring mounted on a parallel four-bar mechanism to adjust the furrowing depth by adjusting the planter unit. Cai et al. designed an automatic control test bed for furrowing depth where a hydraulic cylinder is mounted on a parallel four-bar, ultrasonic sensors are utilized to detect surface undulation, and the hydraulic cylinder adjusts the furrowing depth [51]. Fu et al. mounted a downforce sensor on the limit pin of the depth-limiting wheel for sensing the downforce and mounted a hydraulic cylinder on a parallel four-bar so that it could acquire the downforce information, thus realizing the real-time adjustment of furrowing depth. The test showed that the seeding depth pass rate of the downforce control device was 25.19 percentage points higher than that of the mechanical adjustment method [46,52]. Bai et al. achieved furrowing depth regulation by adjusting the hydraulic cylinder downforce on the four-link mechanism. The field test showed that the sowing depth qualification rate of electrohydraulic active adjustment was 8.66% higher than that of mechanical adjustment. The coefficient of variation of sowing depth was 7.75% lower in electrohydraulic active regulation than in mechanical regulation [53]. Zhao et al. designed a furrowing depth control device, mainly composed of a ground surface height detection mechanism and a four-link imitation mechanism. Displacement sensors were used to sense the undulation of the profiling wheel and transmit it to the PLC, which controlled the expansion and contraction of the hydraulic cylinder according to the undulation of the ground surface and realized the real-time adjustment and closed-loop control of the furrowing depth [54]. Some experts and scholars have also proposed to connect the hydraulic device directly with the furrow opener to realize the real-time adjustment of the furrow depth. Kokoshin et al. installed a flexible tubular element above the furrow opener, which has a cross-section that can be deformed under the control of a hydraulic system, thus actively controlling the depth of the furrow opener [55]. Zhang et al. designed a garlic sowing depth adjustment device based on a hydraulic drive, which directly connects the furrow opener to the hydraulic cylinder and controls the furrow depth of the opener in real time. The test results showed that the average error of seeding depth adjustment was 4.7%, and the coefficient of variation was 5.3%, which could meet the test requirements [56].
Hydraulically driven downforce adjustment device mainly adopts the tractor as the hydraulic input source. Hydraulically driven downforce regulators can provide large force and torque, sizeable adjustable range, and high stability and can realize more accurate adjustment in different terrain and soil conditions. Hydraulically driven downforce adjustment device has fast response and is suitable for high-speed operation of seeding equipment, and is primarily installed in high-speed and large-sized operational seeding machines.
3.2.2. Pneumatic Driven Downforce Adjustment Device
The pneumatic-driven downforce adjustment device mainly utilizes a pneumatic device instead of a mechanical spring, which is mounted on a parallel four-bar mechanism to achieve the adjustment of furrow depth by adjusting the seeding monobloc [57]. The MAXIMETRO series of pneumatic precision planters from MASCHIO, Italy, provide uniform adjustment of furrowing depth using air springs [49,58]. Gao et al. designed a downforce adjustment mechanism based on a pneumatic drive device, using air pressure and temperature sensors to detect the working state of the pneumatic drive device through the airbag deformation to control the depth of the planter unit furrowing. The test results show that with the device in the high-speed operation of 10 km/h, the coefficient of variability of the depth of the sowing can still reach 6.97%, and the stability of the furrowing depth is high [59]. Zhou et al. designed an active adjustment system for sowing depth based on air springs and Flex sensors, which reduced the error by 40% compared with passive adjustment [60]. In order to reduce the influence of downforce on furrowing depth, Cao et al. identified the critical parameters of the air spring that had a significant influence on the downforce according to gas–solid coupling simulation and optimized the key parameters to improve the stability of the furrowing depth of pneumatic active profiling adjusting device [61]. The pneumatic-driven downforce adjustment device has the advantages of better adaptability and lightweight. At the same time, the pneumatic shock absorber can withstand the impact of very high pressure and vibration and has a sound vibration-damping effect. However, the pneumatic pressure-driven downforce regulator requires an external pneumatic pressure source on the planter, which is costly [59].
The active profiling adjusting device can maintain a consistent sowing effect in operation without manual intervention relative to the passive profiling adjusting device. It can also improve seeding efficiency and reduce waste and manual labor costs while ensuring uniform crop growth. However, the active profiling adjustment device needs to be assisted by sensors, which is difficult and costly to develop. The passive profiling device has higher durability and lower operating costs than the active profiling device. It is more suitable for small plot operations. It is easy to operate and requires a lower educational level for farmers. However, the position of the mechanical spring needs to be adjusted to realize the adjustment of the downforce according to the experience before the operation, which is challenging to match with the actual conditions of the soil, although it can get better consistency of the sowing depth. Compared with the hydraulically driven downforce adjustment device, the pneumatic-driven downforce adjustment device requires an additional external pneumatic pump. This results in increased costs. The pneumatic-driven downforce adjustment device has a slower response time than the hydraulically driven downforce adjustment device. AgLeader has found that the response time of a downforce regulator can be reduced from 20 s to 1 s by utilizing the hydraulically driven downforce adjustment device developed by the company instead of the pneumatic-driven downforce adjustment device [62]. Therefore, the hydraulically driven downforce adjustment device is more suitable for plots with large surface undulations and is better suited for high-speed operations. The pneumatic-driven downforce adjustment device has better vibration-dampening properties than the hydraulically driven downforce adjustment device, which ensures better stability of the furrowing depth for less undulating ground.
In summary, the current research on the profiling adjustment device is divided into two aspects. The first is to optimize the design of the traditional mechanical structure. It is mainly to optimize the parameters or micro-innovation of the existing passive profiling device to improve its operational performance and increase its applicability. Passive profiling devices typically rely on the weight of the planter unit to provide downforce. As the loaded seed and fertilizer decrease, the self-weight of the planter unit will decrease, resulting in insufficient downforce to meet the furrowing needs of the planter unit. During high-speed operation, the depth-limiting wheel may even be detached from the ground, making it challenging to meet the demand for precision seeding [63]. For this reason, foreign researchers and scholars took the lead in proposing the active profiling adjustment device. Active profiling adjustment devices mainly use sensor detection. The data are obtained by the sensor through the mathematical model calculation to get the actual depth of furrowing, and then the downforce on the seeding monomer is regulated through the hydraulic- or pneumatic-driven downforce adjustment device instead of the mechanical spring-type adjustment device, thus realizing the real-time and accurate adjustment of the depth of furrowing of the planter unit. Foreign countries that carry active profiling already have mature products, but China’s planter profiling regulator is still based on traditional passive profiling. China’s research on active profiling adjustment devices has begun to see results. However, an immature planter in the market seriously restricts the development of China’s planter to the goal of high precision.
4. Furrowing Depth Stability Control—Furrowing Depth Detection Technology
With the gradual maturity of measurement and control technology, seeding machines are gradually developing in the direction of high speed and precision. In order to improve the stability of furrowing depth, the use of measurement and control technology to accurately detect the depth of furrowing has become an inevitable requirement to ensure the quality of seeding. At present, experts and scholars working in relevant fields have developed the measurement and control equipment for furrowing depth control and realized the precise adjustment of furrowing depth using the active profiling adjustment device. Trenching depth detection is widely used to detect the distance of the machine relative to the ground surface and, using mathematical modeling, to get the actual depth of furrowing. Scholars mainly adopt ultrasonic, optical ranging, pressure, and angle sensors for depth detection. By summarizing and analyzing, the commonly used sensors can be classified into contact, noncontact, and ingression. The main features, functions, and installation locations of these sensors are shown in Table 4.
Table 4.
Sensors commonly used for furrowing depth detection.
4.1. Noncontact Detection Method
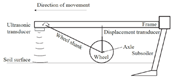
The more typical furrowing depth detection at present is the use of noncontact measurement methods. Noncontact furrowing depth detection mainly uses ultrasonic or optical ranging sensors to detect the height of the frame relative to the ground, which is calculated by mathematical modeling to obtain the furrowing depth of the furrower [75,76]. Zhang et al. developed a soil height change acquisition system based on an infrared ranging sensor and a microcontroller, which has a measurement accuracy of 3 mm and a stability of 91.8% and can support furrowing profiling control [65]. Linden et al. designed a laser sensor-based mechanical weeding device for depth control. The results showed that the sensor depth measurement was not affected by soil moisture content, soil texture, and light, and the depth measurement accuracy could reach 1 mm [66]. To reduce the surface stubble and residual straw on the noncontact sensor detection errors, scholars proposed using noncontact sensors to detect changes in the height of the planter frame and, using mathematical model calculations, to get the depth of the open furrow. In order to detect soil firmness at the same depth, wheel-LVDT sensors were utilized to obtain frame height variations, and by adjusting the tractor’s three-point suspension angle, soil firmness was maintained, which in turn kept the operating depth constant. The standard error during the operation of the machine can reach 0.033 m, which can meet the operational requirements [68]. Nielsen et al. developed a seeding depth measurement system using a linear displacement sensor and an ultrasonic sensor to measure the distance of the trencher relative to the rack and the rack relative to the ground, respectively; by fusing the signals transmitted by the two sensors, the actual furrowing depth of the furrower can be obtained, and the seeder can still achieve accurate seeding at speeds up to 12 km/h [64]. In order to adapt to the detection accuracy of furrowing depth under different terrain conditions, Lee et al. developed a tillage depth detection system, which uses optical sensors to detect its distance from the ground, inclination sensors to detect the pitch angle of tractors, and lift arm sensors to measure the position of lifting arms, then fuses the data detected by the three sensors, and calculates the tillage depth based on mathematical models [67].
4.2. Contact Detection Method
Straw and stubble on the surface of no-tillage land significantly impact the measurement accuracy of noncontact sensors, so experts and scholars in relevant fields have proposed to detect the depth of furrowing using contact sensors. The contact sensor mainly adopts the pressure sensor to obtain the contact situation between the profiling wheel and the ground surface. Then, it obtains the furrowing depth by converting the information. Gao et al. used an axle pin sensor to detect the downforce of the depth-limiting wheel and an angle sensor to obtain the height of the depth-limiting wheel oscillating relative to the bottom of the furrowing disc, which improved the stability of the depth of the furrowing [26]. Jia et al. designed a tillage depth monitoring system applicable to different terrains, which uses a surface-adapted adjustable pendulum arm as well as an optical encoder to measure the rotation of the pendulum arm and adjusts the depth detection based on the detected angle and the established LabVIEW program, which can apply to tillage depth measurement in different terrains. It had maximum absolute errors of 11.3 mm and 12.8 mm and maximum relative errors of 7.40% and 8.53% for flat and slope field tests, respectively [69]. Jia, Zhou, Huang, and Li et al. found through field experiments that either Flex or PVDF sensors mounted on profiling wheels can produce sensitive profiling effects on the undulation changes of the ground [60,70,71,72]. Li et al. used pressure sensors to detect the size of the pressure in the rear profiling wheel. When the seeding operation speed is 3–8 km/h, the seeding depth qualification rate is higher than 90%, which solves problems such as profiling lag brought by the profiling of the rear profiling wheel [73].
4.3. Ingression Detection Method
In addition to the commonly used sensors mentioned above for detection, there are also ingression sensors for detecting furrowing depth. This type of sensor is usually installed before the furrowing device when the planter rises and falls. According to the different physical and chemical properties of the soil at different depths, in order to obtain different signals, the system processes the signals to obtain the actual furrowing depth of the planter. Weatherly et al. developed an automatic control system for seeder sowing depth based on DFS. A drying front sensor senses the changes in the depth of the planter’s leading edge, and the system controls the sowing depth through an electromagnetic proportional reversing valve. Its positioning error is 0.66 cm, and the optimized system response time can reach 255 ms [74]. When the seeding depth deviation detected by the drying front sensor reaches more than 2.5 cm, the system adjusts the position of the furrow opener, and its adjustment error is 0.66 mm.
The characteristics of the different types of sensors are shown in Table 5. Sensors have relatively low accuracy compared with contact sensors. It is highly affected by stubble and straw residue in the field, does not measure soil firmness, and does not provide the required trenching force for the system [70]. Appropriate downforce can improve the furrow opening depth’s stability and avoid compaction of seed furrows, which can improve crop emergence and yield [14,77]. Contact sensors mainly use pressure sensors to detect the downforce of the depth-limiting wheel, which can simultaneously obtain the downforce and the depth of furrowing, providing more comprehensive information for improving the seeding effect. They have high accuracy, wide measuring range, and reliability compared with noncontact sensors, but they are susceptible to temperature and humidity. When the depth-limiting device is subjected to shock and vibration, it can cause problems such as unstable signals from noncontact sensors [26]. According to the measurement properties of the sensor, for plots with large surface undulations, the contact sensor signal is unstable and prone to damage because the depth-limiting device is susceptible to large shocks and vibrations. For this situation, noncontact sensors are considered, but it is also difficult to meet the operational requirements for precision seeding using noncontact sensors. Contact sensors are more suitable for measuring no-till surfaces because of the susceptibility of noncontact sensors to stubble and straw residue in the field. Due to the more complex soil conditions in the field, the physical and chemical properties of the soil are different in different plots and at different times in the same plot. Compared with contact and noncontact sensors, using ingression sensors to detect the depth of the seeder into the soil requires much preliminary work, and the detection error is large.
Table 5.
Characteristics of different types of sensors.
In summary, it can be concluded that with the development of precision seeding technology, the requirements for measurement and control accuracy are getting higher and higher. Due to the more complex field operating conditions, it is difficult to have ideal field operating conditions suitable for a single sensor. Due to the limitations of a single sensor, it will cause a significant detection error. In order to improve the detection accuracy of furrow depth, multi-sensor fusion should be used for detection. Multi-sensor fusion can give full play to the sensor’s advantages, reduce the sensor’s detection error, and improve the detection accuracy. Multi-sensor detection requires the system to process the output signals of the sensors comprehensively, and the noise points generated by the sensor detection need to be discriminated and decided whether to be removed or not. Therefore, the exactness of the control system processing is crucial for using multi-sensor detection.
5. Furrowing Depth Stability Control—Automatic Control System
The furrow depth detection device is usually located in a position different from the furrow opener, which will cause the lagging or leading of the profiling, and the detection accuracy of the system profiling components will directly affect the stability of the furrow depth. The poor surface flatness of the planter field operation, especially in the no-till surface, requires high detection accuracy of the sensor, and the complex field operating conditions are likely to cause downforce fluctuations while seeding, affecting the seeding quality [78]. In order to improve the stability of the furrowing system and reduce the fluctuation of the downforce, researchers mainly use the system feedback adjustment to reduce the system profiling error and use the downforce adjustment to improve the stability of the furrowing depth.
5.1. System Feedback Regulation
In order to reduce the profiling error brought by the profiling advance or lag of the system, the relevant experts and scholars began to use the system feedback regulation to reduce the error of the profiling control system. Zhao et al. designed a furrowing depth control system based on displacement sensors and hydraulic cylinders, utilizing PLC closed-loop control and compensating for the delay time to realize the synchronous profiling of the furrowing depth. The experimental results show that the stability coefficient of the furrowing can reach more than 90% at the advancing speed of 5 km/h and the depth of the furrowing below 70 mm [79]. Liang et al. designed a constant pressure profiling control system based on PLC closed-loop control. The system is simulated and analyzed using MATLAB. The results show that the control system operates stably with an overshoot of 5.02%, a response time of 0.25 s, and a steady-state error of 0.79%. The bench test shows that the average steady-state error of the system is 1.4~1.8 N, the maximum steady-state error is 2.7 N, and the standard deviation is 0.78~6.94%, which can meet the test requirements. It can ensure that the furrow opener operates under constant pressure and provides a reference for the design of the furrow depth profiling control system [80]. In order to improve the electrohydraulic control of the seeding depth system, Zhou et al. combined feed-forward compensation PID and IPRC for dynamic regulation of downforce. The integrated control of sowing depth and soil downforce was realized, and the sowing quality was improved. The test results showed that the seeding depth qualification rate of self-weight adjustment, spring adjustment, and electrohydraulic adjustment was 89.2%, 96.7%, and 98.6%, respectively, and the corresponding maximum coefficients of variation of seeding depth were 16.7%, 12.9%, and 6.4%, respectively [81]. Nielsen et al. developed a furrowing depth control system. An angle sensor was installed in the corner of the furrow opener to provide angle feedback to the system, and the system provided a constant furrowing depth through an electrohydraulic actuator. Experimental results showed that the furrowing depth of the system was independent of the resistance of the seedbed and maintained high stability of the furrowing depth when the resistance of the seedbed changed [82].
5.2. System Downforce Adjustment
Sowing downforce affects the quality of seeding. When the downforce of the seeding machine is insufficient, it is easy to cause insufficient depth of furrow opening, resulting in loose soil in the seed furrow and increasing the occurrence of air pockets. When the downforce is too large, it is easy to cause soil compaction in the seed furrow, resulting in low seed germination [83]. Stable downforce can improve the stability of furrowing depth and increase crop yield [84]. Therefore, experts and scholars in relevant fields began to utilize downforce control to improve the stability of open furrow depth. Jing et al. installed force sensors on the furrow depth-adjusting member and used PID closed-loop control based on CAN communication. The field test results showed that the downforce via electronically controlled hydraulic control system improved the stability of sowing depth by 1.05~2.23% and the pass rate by 3.12~34.38% [85]. Li et al. designed an active force sensor-based downforce regulator using a linear motor instead of a compression spring. The experimental results showed that the active control system had 8.11% less variance in downforce stability than the traditional passive system and could regulate the downforce according to the agronomic requirements of the crop [86]. Precision Planting has developed a SeederForce downforce control system. The system utilizes air springs or hydraulic cylinders instead of mechanical springs for downforce control of furrow depth. A SmartDepth furrow depth control system was also developed, which utilizes a motor-driven adjustment handle to adjust the height of the depth limit wheel. It also utilizes the 20/20 SeedSense monitoring system to monitor the downforce and sowing depth in real time, realizing the online adjustment of downforce and sowing depth [87].
5.3. Multi-System Fusion Regulation
Setting only a separate downforce control or sowing depth control still affects the stability of sowing depth and cannot meet the requirements of precision sowing [88]. For this reason, experts and scholars in relevant fields proposed multi-system fusion regulation to realize real-time monitoring and on-site evaluation of sowing depth. Pasi et al. developed a depth control system for a cereal seeder that complies with the ISO 11783 communication standard. Using eight sensors to measure the angle and distance of the planter and estimating the working depth based on the acquired signals, the control system operates at a frequency of 10 Hz, which allows the planter to realize that with its error of no more than 10 mm at driving speeds of up to 10 km/h and improves the stability of the furrowing depth of the cereal-based planter [89]. Gao et al. designed a downforce seeding depth monitoring and evaluation system based on CAN bus communication, which utilizes angle and axle pin sensors to detect the seeding depth and downforce and improves the response speed of the pneumatic-drive unit system. The test results showed that the minimum sowing depth pass rates corresponding to left zone control, proper zone control, mechanical adjustment, and self-weight adjustment were 91.92%, 92.53%, 70.44%, and 58.72%, respectively. The sowing depth monitoring and evaluation system substantially improved the sowing depth stability of the planter compared with mechanical and self-weight adjustment [90]. In order to improve the stability of the furrow profiling system for sloping cropland with large surface undulations, Fu et al. designed an agricultural terrain profiling system that can adapt to the tilting of the terrain undulations. The experimental results showed that the elevation mimicry error was 1.61 mm, and the slope error was 0.56° at the operating speed of 2 km/h, which provided an experimental platform for the seeding depth control system [91].
The use of separate downforce control or seeding depth control is less costly and easier to develop than multi-system fusion regulation. Due to the time required for sensor transmission and system processing, the speed of seeder advancement varies each time, so it is difficult for the system to accurately control the operation of the profiling components, which will lead to advancement or lagging of the seeder profiling. This error can be reduced by using simple feedback regulation of the system. However, due to the complexity of field operating conditions, feedback control of downforce or seeding depth alone does not meet the requirements of precision seeding. Multi-system fusion adjustment is usually real-time monitoring and field evaluation of seeding depth. Compared with separate feedback control of downforce or sowing depth, it can adjust the operating status of the profiling components according to the planter in real time and improve the operating accuracy.
From the above analysis, pure downforce control or sowing depth control is not enough to maintain the stability of sowing depth. In order to improve the stability of sowing depth, scholars at home and abroad have gradually integrated downforce control and sowing depth control to realize real-time monitoring and on-site evaluation of sowing depth to achieve the requirements of precision sowing. Presently, domestic and foreign research on the depth of furrow profiling control systems mainly focuses on flat land, and there are more mature products in the application market. However, more studies should be conducted on sloping cultivated land with large surface undulations. Due to the large ups and downs of sloping cultivated land, the traditionally designed furrowing depth control system can only cope with the ups and downs of sloping land. It is challenging to cope with sloping land’s left and right ups and downs. It is easy to cause inconsistency in sowing depth. China’s hilly and mountainous arable land accounts for one-third of the national area. The future development of furrowing system control should focus on improving the operation effect of hilly and mountainous area seeding machines.
6. Future Development Problems and Prospects
6.1. Existing Problems
The stability of furrow depth control is the main factor affecting seeding depth. To improve the furrowing depth control technology, scholars examined three key aspects: profiling adjustment devices, furrowing depth detection technology, and automatic control systems. Due to the complex field operating environment, the existing furrowing system cannot stabilize the furrowing depth efficiently with the uneven ground surface. The development of foreign furrow depth control technology is more mature, and intelligent planters with better operating results have been put into the market. China’s research on an intelligent furrowing depth control system is still experimental. Compared with foreign countries, China’s research on furrow depth control technology is still in the initial stage, and there is a big gap. According to the current furrowing system research, China’s development of furrowing system research mainly exists in the following problem areas:
- (1)
- The research on the furrowing system mainly focuses on flat land. The traditional furrowing depth control system can only cope with the simple ups and downs of sloping land. It is challenging to cope with sloping land’s left and right ups and downs.
- (2)
- Downforce adjustment is a crucial factor affecting the stability of furrowing. Most of the current seeding machines rely on experience to adjust the downforce and do not consider different soil textures of different plots in real-time adjustment.
- (3)
- The profiling adjustment device is mainly micro-innovation or adds sensors to improve adjustment accuracy, but more research on vibration balance needs to be done. Due to the complex field operating conditions, the vibration of the planter unit would affect the stability of the furrow depth and reduce the machine’s operating life.
- (4)
- The planter for furrow depth sensor detection is in the experimental stage, and there are fewer related operating machines equipped with furrow depth detection sensors. Most of the research is still in the single-sensor detection stage. Due to the limitations of the single-sensor, significant detection errors are frequent.
- (5)
- The research on the furrowing depth control system is in the experimental stage, mainly focusing on simple downforce control or sowing depth control with poor regulation accuracy. The research on the planter furrowing system should consider different agronomic requirements due to different soil textures in different regions to improve the system’s universality.
6.2. Development Prospects
Mature products equipped with passive and active open furrow profiling control systems have been put into use in many countries. In China, the passive type still dominates, and the active type is experimental. China mainly focuses on the direct control of sowing depth, and there needs to be more research on the indirect control of sowing depth by utilizing downward pressure. In China, the stability control of furrowing depth is mainly focused on the flat land, and less research has been done on the sloped fields. There is an apparent gap in the seeding machines between China and other countries regarding intelligent monitoring. To bring China’s seeding machine operation to high speed and precision of the development requirements, the depth of the furrow profiling control system development has the following directions:
- (1)
- Given the operating shorts on sloping arable land in China, we should improve the traditional seeder furrow profiling control, solving the operating needs of sloping arable land in terms of up-and-down and left-and-right profile, improving the effect of seeding operation in sloping arable land and improving the universality of the seeding machine.
- (2)
- For the differences in soil properties, crop varieties, and planting modes in different regions of China, we need to determine the most suitable sowing depths and downforce of planter operations for sowing crops in different regions according to the interplay mechanism of soil–furrowing–crop components, to provide references for sowing.
- (3)
- Strengthen the optimized design of the profiling adjustment device, reduce the vibration of the profiling adjustment device in the operation process, and improve its stability. Under the premise of ensuring that the operating effect remains unchanged, reduce the operating cost of implements and improve the working life of implements.
- (4)
- Enhance the development of active profiling adjustment systems and improve the stability of the system by using multi-sensor fusion on top of the existing ones. Promote the development of China’s seeding machine in the direction of high speed and precision and improve the operational quality and efficiency of China’s seeding machine.
- (5)
- Based on the development of an active profiling adjustment system, optimize the algorithm by combining the physicochemical parameters of different soils and develop a furrow depth control system suitable for different soils to improve the detection accuracy and convenience of the system.
- (6)
- Increase the investment in the research and development of intelligent agricultural machinery and devices and promote the development of China’s seeding machines in the direction of automatic navigation, automatic monitoring, and evaluation of seeding quality, variable seeding, high-speed seeding, and other intelligent precision seeding.
7. Conclusions
In this review, we aim to summarize the furrowing depth adjustment systems in different ways of operation and provide critical technologies and breakthrough paths for future research on planter furrowing. China’s research on furrowing depth adjustment systems is mainly to make small innovations to the planter unit or add sensors to improve the stability of furrowing depth, and there is a lack of research on the vibration of the planter unit. Compared with foreign planter units, the furrowing operation effect is poor. It is challenging to profile with complex operating conditions, such as sloping cropland. The furrowing depth control system still has many challenges but has a broad development prospect. In the future, the furrow depth control system should be developed in the direction of automatic navigation, automatic monitoring and evaluation of sowing quality, variable sowing, high-speed sowing, and other intelligent precision sowings based on improving the applicability under complex operating conditions, such as sloping arable land.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/app132111884/s1, Table S1: Data on the growth status of maize seedlings.
Author Contributions
Conceptualization, H.L. (Hang Li) and J.H.; writing—original draft preparation, H.L. (Hang Li); writing—review and editing, C.W., W.Y., H.L. (Han Lin), Q.W., H.Y. and L.T.; funding acquisition, J.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key R&D Program of China (2022YFD1500902).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Muangprathub, J.; Boonnam, N.; Kajornkasirat, S.; Lekbangpong, N.; Wanichsombat, A.; Nillao, P. Iot and Agriculture Data Analysis for Smart Farm. Comput. Electron. Agric. 2019, 156, 467–474. [Google Scholar] [CrossRef]
- Wang, Q.; He, J.; Lu, C.; Wang, C.; Lin, H.; Yang, H.; Li, H.; Wu, Z. Modelling and Control Methods in Path Tracking Control for Autonomous Agricultural Vehicles: A Review of State of the Art and Challenges. Appl. Sci. 2023, 13, 7155. [Google Scholar] [CrossRef]
- Liu, C.L.; Lin, H.Z.; Li, Y.M.; Gong, L.; Miao, Z.H. Analysis on Status and Development Trend of Intelligent Control Technology for Agricultural Equipment. Trans. Chin. Soc. Agric. Mach. 2020, 51, 18. [Google Scholar] [CrossRef]
- Yuan, Y.W.; Bai, H.J.; Fang, X.F.; Wang, D.C.; Zhou, L.M.; Niu, K. Research Progress on Maize Seeding and Its Measurement and Control Technology. Trans. Chin. Soc. Agric. Mach. 2018, 49, 18. [Google Scholar] [CrossRef]
- Yuan, Y.W.; Zhang, X.C.; Wu, C.C.; Zhang, C.C.; Zhang, J.N.; Zhou, L.M. Precision Control System of No-Till Corn Planter. Trans. CSAE 2011, 28, 222–226. [Google Scholar] [CrossRef]
- Berti, M.T.; Johnson, B.L.; Henson, R.A. Seeding Depth and Soil Packing Affect Pure Live Seed Emergence of Cuphea. Ind. Crop. Prod. 2008, 27, 272–278. [Google Scholar] [CrossRef]
- Gupta, S.C.; Schneider, E.C.; Swan, J.B. Planting Depth and Tillage Interactions on Corn Emergence. Soil Sci. Soc. Am. J. 1988, 52, 1122–1127. [Google Scholar] [CrossRef]
- Yang, W.C.; He, J.; Lu, C.Y.; Lin, H.; Yang, H.Y.; Li, H. Current Situation and Future Development Direction of Soil Covering and Compacting Technology under Precision Seeding Conditions in China. Appl. Sci. 2023, 13, 6586. [Google Scholar] [CrossRef]
- Zhu, W.H.; Tie, S.G.; Sun, J.J.; Lu, C.Y.; Qi, J.S.; Zhou, K. Effect of Different Soil Texture and Depth of Sowing Seed on the Seedling Emergence Potential of Sweet Corn Hybrid. J. Henan Agric. Sci. 2005, 11, 35–36. [Google Scholar] [CrossRef]
- Xu, H.T.; Wang, Q.J.; Wang, Y.H.; Xu, B.; Wang, C.Y. Effects of sowing depth difference on maize seed germination and seedling emergence, seedling characteristics and root system trait. J. Henan Inst. Sci. Technol. 2020, 48, 10–17. [Google Scholar] [CrossRef]
- Nadeem, M.; Mollier, A.; Pellerin, S. Effects of Sowing Depth on Remobilization and Translocation of Seed Phosphorus Reserves. J. Anim. Plant. Sci. 2018, 28, 934–939. [Google Scholar]
- Ozmerzi, A.; Karayel, D.; Topakci, M. Effect of Sowing Depth on Precision Seeder Uniformity. Biosyst. Eng. 2002, 82, 227–230. [Google Scholar] [CrossRef]
- Poncet, A.M.; Fulton, T.P.; McDonald, T.P.; Knappenberger, T.; Shaw, J.N.; Bridges, R. Effect of Heterogeneous Field Conditions on Corn Seeding Depth Accuracy and Uniformity. Appl. Eng. Agric. 2018, 34, 819–830. [Google Scholar] [CrossRef]
- Poncet, A.M.; Fulton, T.P.; McDonald, T.P.; Knappenberger, T.; Shaw, J.N. Corn Emergence and Yield Response to Row-Unit Depth and Downforce for Varying Field Conditions. Appl. Eng. Agric. 2019, 35, 399–408. [Google Scholar] [CrossRef]
- Poncet, A.M.; Fulton, T.P. Emergence of Corn According to the Sowing Depth of the Seed and Loads on Press Wheels. Engenharia Agricola 2012, 32, 326–332. [Google Scholar] [CrossRef]
- Pedro, H.; Angelo, R.C. Sensor Systems for Measuring Soil Compaction: Review and Analysis. Comput. Electron. Agric. 2008, 63, 89–103. [Google Scholar] [CrossRef]
- Bai, W.; Sun, Z.X.; Zhang, L.Z.; Zhang, J.M.; Feng, L.S.; Cai, Q.; Xiang, W.Y.; Feng, C.; Zhang, Z. Furrow Loose and Ridge Compaction Plough Layer Structure Optimizing Root Morphology of Spring Maize and Improving Its Water Use Efficiency. Trans. CSAE 2019, 35, 97–106. [Google Scholar] [CrossRef]
- Xu, W.Q.; Yang, Q.F.; Niu, J.Y.; Xiong, C.R.; Zhang, Y.X. Effects of Temperatures and Soil Moisture Content on Seed Germination and Seedling Growth Characteristics of Maize. J. Maize. Sci. 2013, 21, 69–74. [Google Scholar] [CrossRef]
- Guan, X.K.; Yang, M.D.; Bai, T.T.; Han, J.L.; Huang, J.; Wang, J.L.; Wang, T.C. Suitable Deep Sowing Increasing Emergence Rate and Promoting Summer Maize Growth in Seeding Stage under Subsurface Drip Irrigation. Trans. CSAE 2016, 32, 75–80. [Google Scholar] [CrossRef]
- Song, D.X. Study on the Planting Depth Stability of Precision Planter Unit. J. Laiyang Agric. College 1995, 12, 311–315. [Google Scholar]
- Jia, H.L.; Zheng, J.X.; Yuan, H.F.; Guo, M.Z.; Wang, W.J.; Jiang, X.M. Design and Experiment of Profiling Sliding-Knife Opener. Trans. CSAE 2017, 33, 16–24. [Google Scholar] [CrossRef]
- Zhang, M.H.; Luo, X.W.; Wang, Z.M.; Wang, B.L.; Xue, Z.L. Optimization Design and Experiment of Profiling and Slide Board Mechanism of Precision Rice Hill-Drop Drilling Machine. Trans. CSAE 2017, 33, 18–26. [Google Scholar] [CrossRef]
- Xie, B.B.; Jia, Y.C.; Faheem, M.; Gao, W.J.; Liu, J.Z.; Jiang, H.K.; Cai, L.J.; Li, Y.X. Research Progress of Autonomous Navigation Technology for Multi-Agricultural Scenes. Comput. Electron. Agric. 2023, 211, 107963. [Google Scholar] [CrossRef]
- Bai, X.H.; Li, F.; Zhang, Z.L.; Lin, J.; Hu, Y.Q.; Lu, C.Y. Parameter optimization for the Profiling Mechanism Spring of No-Till Planter Based on ADAMS. Agric. Res. Arid Areas 2014, 6, 268–272. [Google Scholar]
- Cao, X.P. Research on Key Technology and Device of No-Tillage Seeding Depth Control in Northeast Black Soil Region of China. Ph.D. Thesis, China Agricultural University, Beijing, China, 2023. [Google Scholar]
- Gao, Y.Y.; Zhai, C.Y.; Yang, S.; Zhao, X.G.; Wang, X.; Zhao, C.J. Measurement Method and Mathematical Model for the Seeding Downforce of Planter Row Unit. Trans. CSAE 2020, 5, 9. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, R.; Liu, Q.W.; Yin, X.W.; He, X.T.; Cui, T.; Zhang, D.X. Row Cleaner and Depth Control Unit Improving Sowing Performance of Maize No-Till Precision Planter. Trans. CSAE 2016, 32, 18–23. [Google Scholar] [CrossRef]
- From Cleaning to Closing|The Three C’s of Emergence. Available online: https://www.precisionplanting.com/agronomy/research/from-cleaning-to-closing-the-three-cs-of-emergence (accessed on 16 September 2023).
- 1590 No Tillage Seeder. Available online: https://www.deere.com.cn/zh/ (accessed on 16 September 2023).
- MECAV4/4E Recommended by Sugarbeet Growers. Available online: https://www.monosem.com/precision-planters/single-seed-planter/mechanical-planter/meca-v4-4e/ (accessed on 16 September 2023).
- KUHN Maxima Precision Seeder. Available online: https://wd.nongji360.com/product/view?id=74236&dmname=shop00150083 (accessed on 16 September 2023).
- Kverneland OPTIMA R Precision Seeder. Available online: https://www.kverneland.cn/node_81064/node_225376/optima-r (accessed on 16 September 2023).
- JLKD 2BMZF-2 No Tillage Finger Clip Precision Fertilization and Seeding Machine. Available online: https://www.nongjitong.com/product/40020.html (accessed on 16 September 2023).
- Doublelan 2BMJZ-3 Traction No Tillage Finger Clip Precision Seeder. Available online: https://www.nongjitong.com/product/shenyangshuanglan_2bmjz-3_seeder.html (accessed on 16 September 2023).
- 2BYFSF-4D Corn No-Tillage Fertilization Precision Seeder. Available online: http://www.nonghaha.com/productinfo/1246191.html (accessed on 16 September 2023).
- Zhao, S.H.; Jiang, E.C.; Yan, Y.X.; Yang, Y.Q.; Tian, B.L. Design and motion simulation of opener with bidirectional parallelogram linkage profiling mechanism on wheat seeder. Trans. CSAE 2013, 29, 26–32. [Google Scholar] [CrossRef]
- Yang, J.; Zhou, W.Y.; Dai, F. Design and Test of Corn Precision Seeder for Dry-Land Whole Film Double Furrow Sowing. Agric. Res. Arid Areas. 2014, 4, 262–268. [Google Scholar]
- Shi, L.R.; Zhou, W.Y.; Sun, W.; Li, R.B.; Sun, B.G. Parameters Optimization of Speed Compensation Mechanism of Electric Driving Maize Planter with Dibbling on Membrane. Trans. Chin. Soc. Agric. Mach. 2017, 48, 87–94. [Google Scholar] [CrossRef]
- Xiang, D.X. Research on Key Parts of High-speed Vacuum Precision Planter Matched with Soybean Narrow-Row-Flat-Dense Seeding Technique. Ph.D. Thesis, Northeast Agricultural University, Harbin, China, 2010. [Google Scholar]
- Cui, T.; Zhang, D.X.; Yang, L.; Gao, N.N.; Wang, X.; Zhao, C.J. Design and Experiment of Collocated-Copying and Semi-Low-Height Planting-Unit for Corn Precision Seeder. Trans. CSAE 2012, 28, 18–23. [Google Scholar]
- 1775NT 16Row30 Drawn Planter. Available online: https://www.deere.com/en/planting-equipment/1775nt-16row30-planter/# (accessed on 16 September 2023).
- Zhang, R.; Cui, T.; Han, D.D.; Zhang, D.X.; Li, K.H.; Yin, X.W.; Wang, Y.X.; He, X.T.; Yang, L. Design of Depth-Control Planting Unit with Single-Side Gauge Wheel for No-Till Maize Precision Planter. Int. J. Agric. Biol. Eng. 2016, 9, 56–64. [Google Scholar] [CrossRef]
- Zhang, R.; Wei, J.T.; Zhang, D.X.; Cui, T.; Yan, B.X.; He, X.T.; Han, D.D. Effects of Wheat Residue and Depth-Control Mechanism of No-Till Seeder on Corn Sowing Performance. Emir. J. Food Agric. 2018, 30, 660–667. [Google Scholar] [CrossRef]
- Yang, Q.C.; Xuo, L.L.; Du, Y.F.; Lang, C.C.; Pan, W.J. Design and Experiment of the Pressing Wheel Profiling Ditching Device for Sowing Panax Notoginseng to Grow Seedlings. Trans. CSAE 2020, 36, 53–62. [Google Scholar] [CrossRef]
- Lu, J.Q.; Yang, X.H.; Feng, X.; Li, Z.H.; Li, J.C.; Liu, Z.Y. Design and Experiment of Sowing Depth Control Device of Potato Planter. Trans. CSAE 2020, 36, 12–21. [Google Scholar] [CrossRef]
- Dai, F.; Guo, W.J.; Song, X.F.; Shi, R.J.; Zhao, W.Y.; Zhang, F.W. Design and Field Test of Crosswise Belt Type Whole Plastic-Film Ridging-Mulching Corn Seeder on Double Ridges. Int. J. Agric. Biol. Eng. 2019, 12, 88–96. [Google Scholar] [CrossRef]
- 1745 Compact Planter. Available online: https://www.deere.ca/en/planting-equipment/1745-planter/ (accessed on 18 September 2023).
- 1725C Planter. Available online: https://www.deere.ca/en/planting-equipment/1725c-planter/ (accessed on 18 September 2023).
- MAXIMETRO Series Traction Precision Seeder. Available online: https://www.agriexpo.cn/prod/maschio-gaspardo/product-169098-141391.html (accessed on 18 September 2023).
- NEW 5900 Planter. Available online: https://www.kinze.com/planters/5900-planter/ (accessed on 18 September 2023).
- Cai, G.H.; Li, H.; Li, H.W.; Wang, Q.J.; He, J.; Ni, J.L. Design of Test-Bed for Automatic Depth of Furrow Opening Control System Based on Atmega128 Single Chip Microcomputer. Trans. CSAE 2011, 27, 11–16. [Google Scholar] [CrossRef]
- Fu, W.Q.; Dong, J.J.; Mei, H.B.; Gao, N.N.; Lu, C.Y.; Zhang, J.X. Design and Test of Maize Seeding Unit Downforce Control System. Trans. Chin. Soc. Agric. Mach. 2018, 49, 68–77. [Google Scholar] [CrossRef]
- Bai, H.J.; Fang, X.F.; Wang, D.C.; Yuan, Y.W.; Zhou, L.M.; Niu, K. Design and Test of Control System for Seeding Depth and Compaction of Corn Precision Planter. Trans. Chin. Soc. Agric. Mach. 2018, 51, 61–72. [Google Scholar] [CrossRef]
- Zhao, J.H.; Yang, X.J.; Liu, L.J.; Liu, Z.J.; Zhou, J.P.; Jin, C. Mechanical Performance Testing Device for Planter Openers Based on PLC. Trans. Chin. Soc. Agric. Mach. 2014, 45, 29–34. [Google Scholar] [CrossRef]
- Kokoshin, S.N.; Kirgintsev, B.O.; Tashlanov, V.I. Disc seeder with auto tracking system depth of sowing seeds. EMMFT 2020, 1614, 012051. [Google Scholar] [CrossRef]
- Zhang, C.L.; Wu, X.Q.; Xie, D.B.; Wang, Q.Q.; Zhang, J.; Chen, L.Q. Design and Experiment of Electro-hydraulic Mixed Garlic Planter. Trans. Chin. Soc. Agric. Mach. 2021, 52, 166–174. [Google Scholar] [CrossRef]
- Zhang, L.G.; Zhang, J.Z.; Jia, L.P.; Huang, W.H.; Zhang, X.W. Future and Development of Air Springs. J. Vib. Shock. 2007, 26, 146–151. [Google Scholar]
- Fu, W.Q. Study on Key Technology of Quality Control for Maize No Tillage Drilling Machinery. Ph.D. Thesis, China Agricultural University, Beijing, China, 2018. [Google Scholar]
- Gao, Y.Y.; Wang, X.; Yang, S.; Zhao, X.G.; Dou, H.J.; Zhao, C.J. Design and Test of Pneumatic Downforce Control System for Planting. Trans. Chin. Soc. Agric. Mach. 2019, 50, 19–29. [Google Scholar] [CrossRef]
- Zhou, S.H.; Wang, Z.H.; Huang, D.Y. No-Till Planter Sowing Intelligent Depth Regulation System Based on Flex Sensor. J. Jilin Univ. 2020, 38, 555–562. [Google Scholar] [CrossRef]
- Cao, X.P.; Wang, Q.J.; Xu, D.J.; Huang, S.H.; Wang, X.H.; Wang, L.B. Design and Analysis of Pneumatic Downforce Regulating Device for No-Till Corn Planter. Agriculture 2022, 12, 1513. [Google Scholar] [CrossRef]
- Planter Hydraulic Downforce with Uplift. Available online: https://www.agleader.com/planting/sureforce/ (accessed on 13 October 2023).
- Liu, Q.W.; He, X.T.; Yang, L.; Zhang, D.X.; Cui, T.; Qu, Z.; Yan, B.X.; Wang, M.T.; Zhang, T.L. Effect of travel speed on seed spacing uniformity of corn seed meter. Int. J. Agric. Biol. Eng. 2017, 10, 98–106. [Google Scholar] [CrossRef]
- Nielsen, S.K.; Munkholm, L.J.; Lamandé, M.; Nørremark, M.; Skou-Nielsen, N.; Edwards, G.; Green, O. Seed Drill Instrumentation for Spatial Coulter Depth Measurements. Comput. Electron. Agric. 2017, 141, 207–214. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, W.; Qi, L.Q.; Fu, H.B.; Yu, L.J.; Li, R.; Zhao, Y.; Ma, X.X. Information Acquisition System of Multipoint Soil Surface Height Variation for Profiling Mechanism of Seeding Unit of Precision Corn Planter. Int. J. Agric. Biol. Eng. 2018, 14, 54–64. [Google Scholar] [CrossRef]
- Linden, S.; Mouazen, A.M.; Anthonis, J.; Ramon, H.; Saeys, W. Infrared Laser Sensor for Depth Measurement to Improve Depth Control in Intra-Row Mechanical Weeding. Biosyst. Eng. 2008, 100, 309–320. [Google Scholar] [CrossRef]
- Lee, J.; Yamazaki, M.; Oida, O.; Nakashima, H.; Shimizu, H. Electro-Hydraulic Tillage Depth Control System for Rotary Implements Mounted on Agricultural Tractor Design and Response Experiments of Control System. J. Terramechanics 1998, 35, 229–238. [Google Scholar] [CrossRef]
- Mouazen, A.M.; Anthonis, J.; Saeys, W.; Ramon, H. An Automatic Depth Control System for Online Measurement of Spatial Variation in Soil Compaction, Part 1: Sensor Design for Measurement of Frame Height Variation from Soil Surface. Biosyst. Eng. 2004, 89, 139–150. [Google Scholar] [CrossRef]
- Jia, H.L.; Guo, M.Z.; Yu, H.B.; Li, Y.; Feng, X.Z.; Zhao, J.L.; Qi, J.T. An Adaptable Tillage Depth Monitoring System for Tillage Machine. Biosyst. Eng. 2016, 151, 187–199. [Google Scholar] [CrossRef]
- Jia, H.L.; Zhu, L.T.; Huang, D.Y.; Wang, Q.; Li, M.W.; Zhao, J.L. Automatic Control System of Sowing Depth for No-Tillage Planter Based on Flex Sensor. J. Jilin Univ. 2019, 49, 166–175. [Google Scholar] [CrossRef]
- Huang, D.Y.; Zhu, L.T.; Jia, H.L.; Yu, T.T. Automatic Control System of Seeding Depth Based on Piezoelectric Film for No-Till Planter. Trans. Chin. Soc. Agric. Mach. 2015, 46, 1–8. [Google Scholar] [CrossRef]
- Li, M.W.; Xia, X.M.; Zhu, L.T.; Zhou, R.Y.; Huang, D.Y. Intelligent Sowing Depth Regulation System Based on Flex Sensor and Mamdani Fuzzy Model for a No-Till Planter. Int. J. Agric. Biol. Eng. 2021, 14, 145–152. [Google Scholar] [CrossRef]
- LI, Y.H.; Meng, P.X.; Geng, D.Y.; He, K.; Meng, F.H.; Jiang, M. Intelligent System for Adjusting and Controlling Corn Seeding Depth. Trans. Chin. Soc. Agric. Mach. 2016, 47, 8. [Google Scholar] [CrossRef]
- Weatherly, E.T.; Bowers, C.G. Automatic Depth Control of a Seed Planter Based on Soil Drying Front Sensing. Trans. ASABE 1997, 40, 295–305. [Google Scholar] [CrossRef]
- Cujbescu, D.; Găgeanu, I.; Persu, C.; Matache, M.; Vlădut, V.; Voicea, I.; Paraschiv, G.; Biris, S.S.; Ungureanu, N.; Voicu, G.; et al. Simulation of Sowing Precision in Laboratory Conditions. Appl. Sci. 2021, 11, 6264. [Google Scholar] [CrossRef]
- Gao, Y.Y.; Wang, X.; Yang, S.; Zhai, C.Y.; Zhao, X.G.; Zhao, C.J. Development of CAN-based Sowing Depth Monitoring and Evaluation System. Trans. Chin. Soc. Agric. Mach. 2019, 50, 23–32. [Google Scholar] [CrossRef]
- Qiao, J.Y.; Zhang, D.; Zhang, H.B.; Zhang, B.; Chen, H.T.; Chen, L.P.; Zheng, D.M.; Sun, J. Effects of Soil Compaction by Various Tractors on Soil Penetration Resistance and Soybean Yields. Trans. CSAE 2019, 34, 26–33. [Google Scholar] [CrossRef]
- Badua, S.A.; Sharda, A.; Strasser, R.; Ciampitti, I. Ground speed and planter downforce infuence on corn seed spacing and depth. Precis. Agric. 2021, 22, 1154–1170. [Google Scholar] [CrossRef]
- Zhao, J.H.; Liu, L.J.; Yang, X.J.; Liu, Z.J.; Tang, J.X. Design and Laboratory Test of Control System for Depth of Furrow Opening. Trans. CSAE 2015, 31, 35–41. [Google Scholar] [CrossRef]
- Liang, F.; Lei, Q.A.; Zheng, S.Y.; Wang, P.; Guo, Z.; Liu, W. Design and Experiment of Electro-Hydraulic Profiling System with Consistent Pressure for Drilling Depth of Furrow Opener. Trans. CSAE 2019, 35, 8. [Google Scholar] [CrossRef]
- Zhou, L.; Ma, Y.; Zhou, H.; Niu, K.; Zhao, B.; Wei, L.; Bai, S.; Zheng, Y.; Zhang, W. Design and Test of Sowing Depth Measurement and Control System for No-Till Corn Seeder Based on Integrated Electro-Hydraulic Drive. Appl. Sci. 2023, 13, 5823. [Google Scholar] [CrossRef]
- Nielsen, S.K.; Nørremark, M.; Green, O. Sensor and Control for Consistent Seed Drill Coulter Depth. Comput. Electron. 2016, 126, 690–698. [Google Scholar] [CrossRef]
- Ding, Q.S.; You, Y.; Xing, Q.D.; Xu, G.M.; Liang, L. Field Bench Test of Seeding Unit Based on Precise Seeding Depth Control Objective. Trans. Chin. Soc. Agric. Mach. 2022, 11, 100–107. [Google Scholar] [CrossRef]
- Liu, W.D.; Tollenaar, M.; Stewart, G.; Deen, W. Impact of Planter Type, Planting Speed, and Tillage on Stand Uniformity and Yield of Corn. Agron. J. 2004, 96, 1668–1672. [Google Scholar] [CrossRef]
- Jing, H.R.; Zhang, D.X.; Wang, Y.X.; Yang, L.; Fan, C.L.; Zhao, H.H.; Wu, H.L.; Zhang, Y.H.; Pei, J.C.; Cui, T. Development and Performance Evaluation of an Electro-Hydraulic Downforce Control System for Planter Row Unit. Comput. Electron. 2020, 172, 105073. [Google Scholar] [CrossRef]
- Li, B.S.; Tan, Y.; Chen, J.; Liu, X.X.; Yang, S.H. Precise Active Seeding Downforce Control System Based on Fuzzy PID. Math. Probl. Eng. 2020, 5123830. [Google Scholar] [CrossRef]
- Precision Planting. Available online: https://www.precisionplanting.com/products/all-products (accessed on 18 September 2023).
- Virk, S.S.; Fulton, J.P.; Porter, W.M.; Pate, G.L. Row-Crop Planter Performance to Support Variable-Rate Seeding of Maize. Precis. Agric. 2020, 21, 603–619. [Google Scholar] [CrossRef]
- Suomi, P.; Oksanen, T. Automatic Working Depth Control for Seed Drill Using ISO 11783 Remote Control Messages. Comput. Electron. Agric. 2015, 116, 30–35. [Google Scholar] [CrossRef]
- Gao, Y.Y.; Zhai, C.Y.; Yang, S.; Zhao, X.G.; Wang, X.; Zhao, C.J. Development of CAN-based Downforce and Sowing Depth Monitoring and Evaluation System for Precision Planter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 15–28. [Google Scholar] [CrossRef]
- Fu, W.Q.; Dong, J.J.; Cong, Y.; Lu, C.Y.; Gao, N.N.; Zhang, J.X. Design and Test of Farmland-terrain Simulation System for Corn Sowing Depth Control. Trans. Chin. Soc. Agric. Mach. 2017, 48, 56–65. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).