
Designing a User-Centered Inspection Device’s Handle for the Aircraft Manufacturing Industry

 ,
, 
 ,
, 
Abstract
:Featured Application
Abstract
1. Introduction
- (1)
- The best ergonomic conditions;
- (2)
- The best stability while holding the device during inspection tasks.
2. Materials and Methods
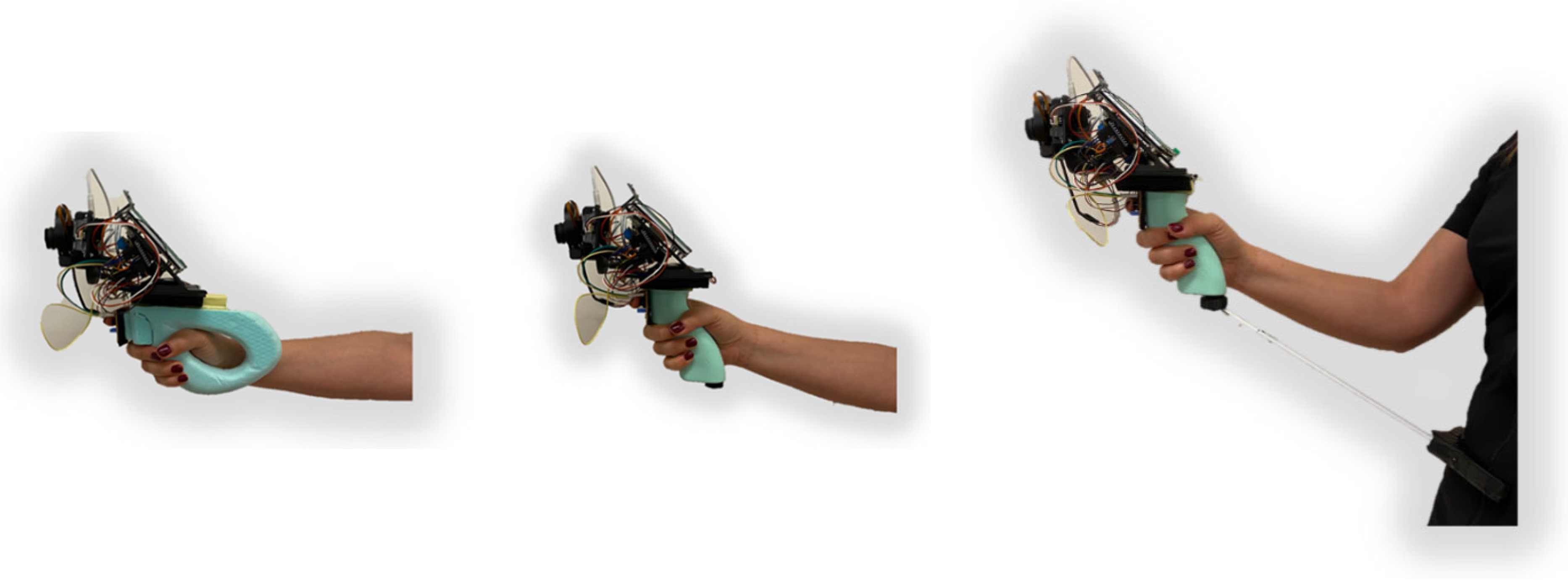
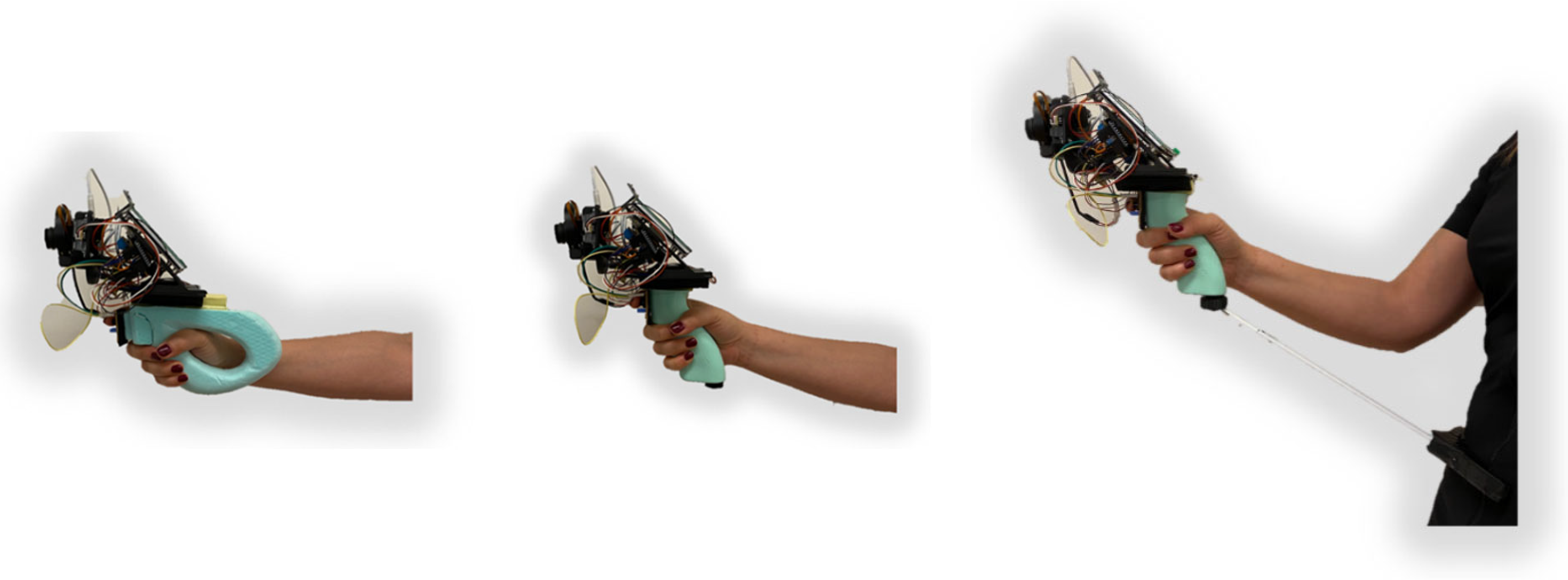
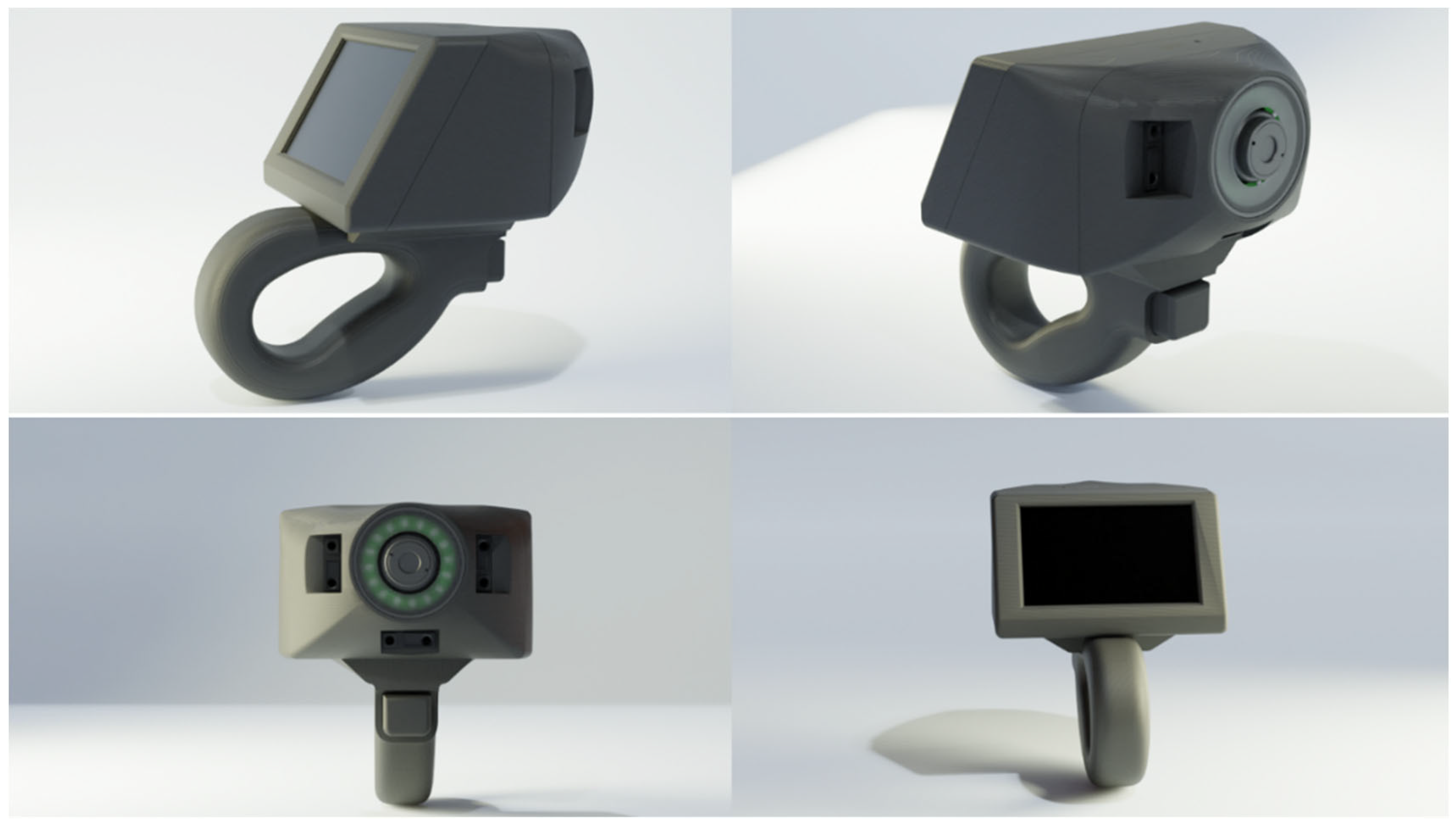
2.1. Description of the Device and Handles Tested
- (1)
- Capture and store images of the defects;
- (2)
- Classify the type and measure the dimensions of the defects;
- (3)
- Automatically generate digital reports with the inspection results.
- (1)
- Handle design potentiating the alignment of the device’s center of mass with the center of the hand holding it;
- (2)
- The handle diameter shall not exceed 40 mm, allowing a power grip for the majority of the workers;
- (3)
- Curved handle shape to avoid deviations of the hand–wrist system during the tasks’ performance;
- (4)
- Handle with a physical protrusion on the extremity to avoid slippage;
- (5)
- The button position to activate focus and image capture must be easily reached by the index finger;
- (6)
- Handle length between 125 and 145 mm to avoid compression of hand’s soft tissues.
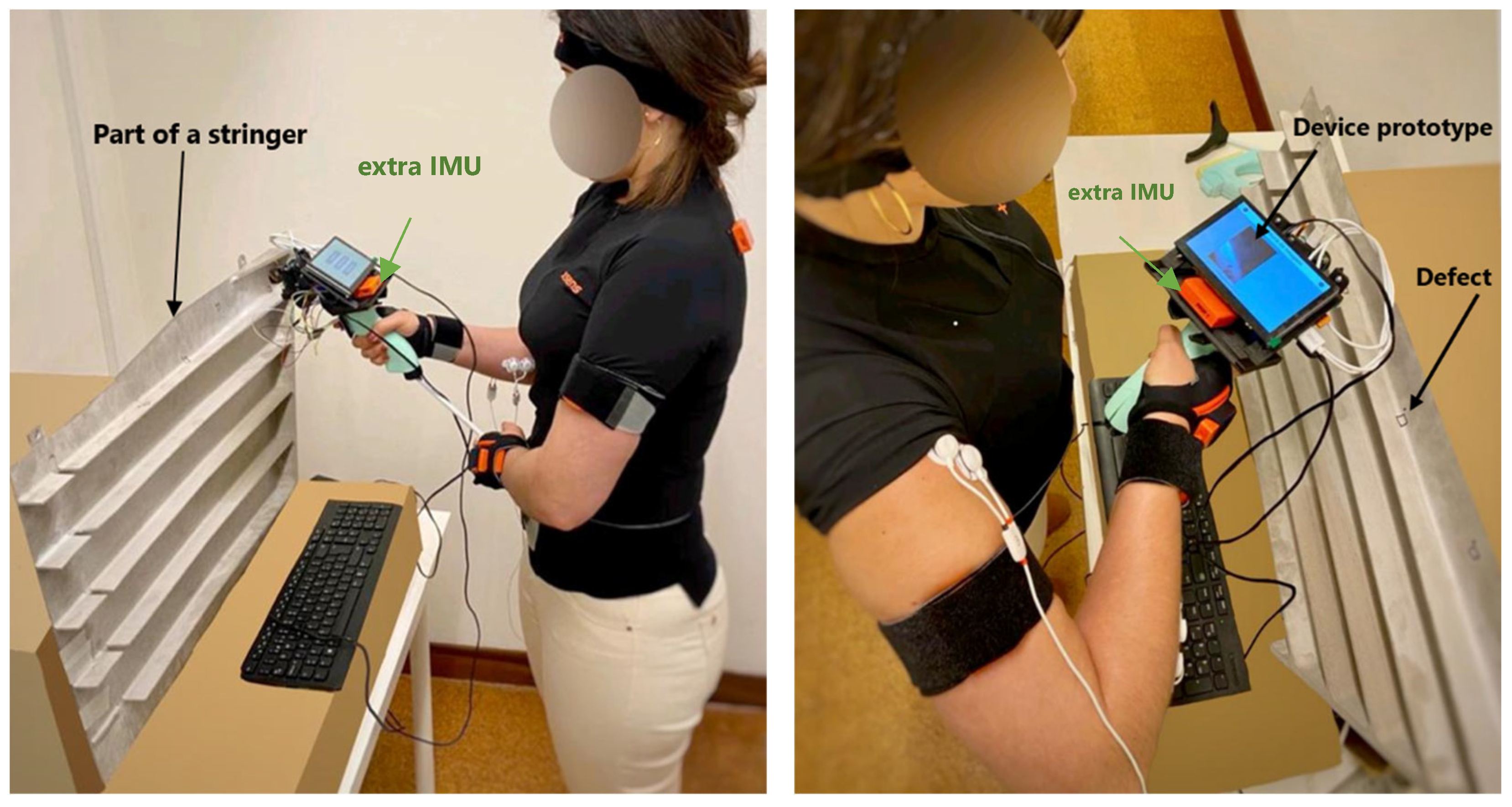
2.2. Experimental Setup
2.3. Description of the Inspection Tasks
2.4. Ergonomic Assessment of the Handles
- (1)
- Participants’ comfort perceived, applying an adapted version of the questionnaire proposed by [17];
- (2)
- Partial times measured for each image captured by an algorithm added to the device’s software that retrieves user action timing;
- (3)
- Stability metrics calculated through data obtained by an IMU attached to the device prototype;
- (4)
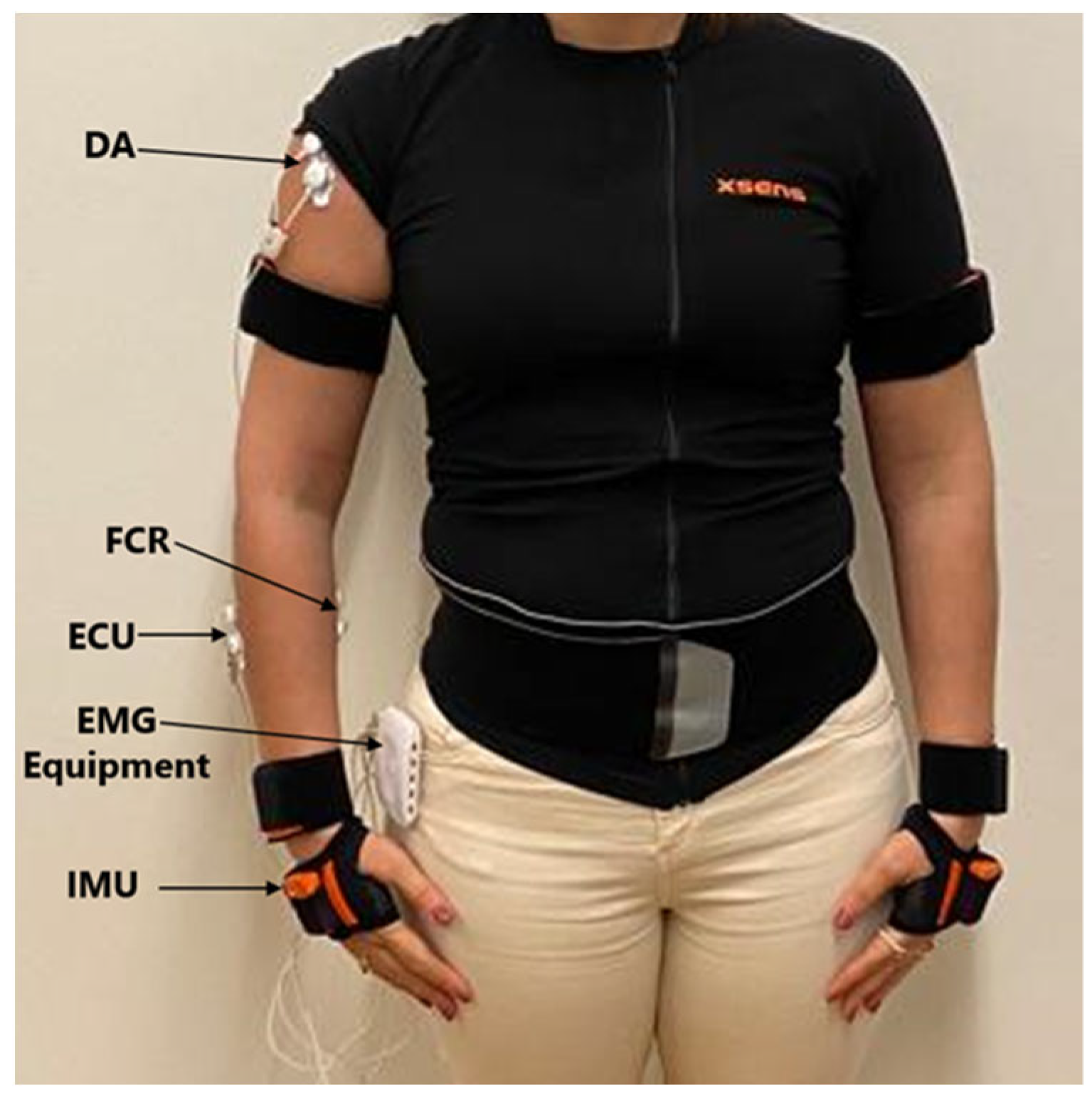
- Physical workload during the inspection simulated tasks. This workload was focused on the upper arm (participants’ dominant side) and quantified by EMG activity and kinematics analysis through IMU.
2.5. Participants’ Perceived Comfort
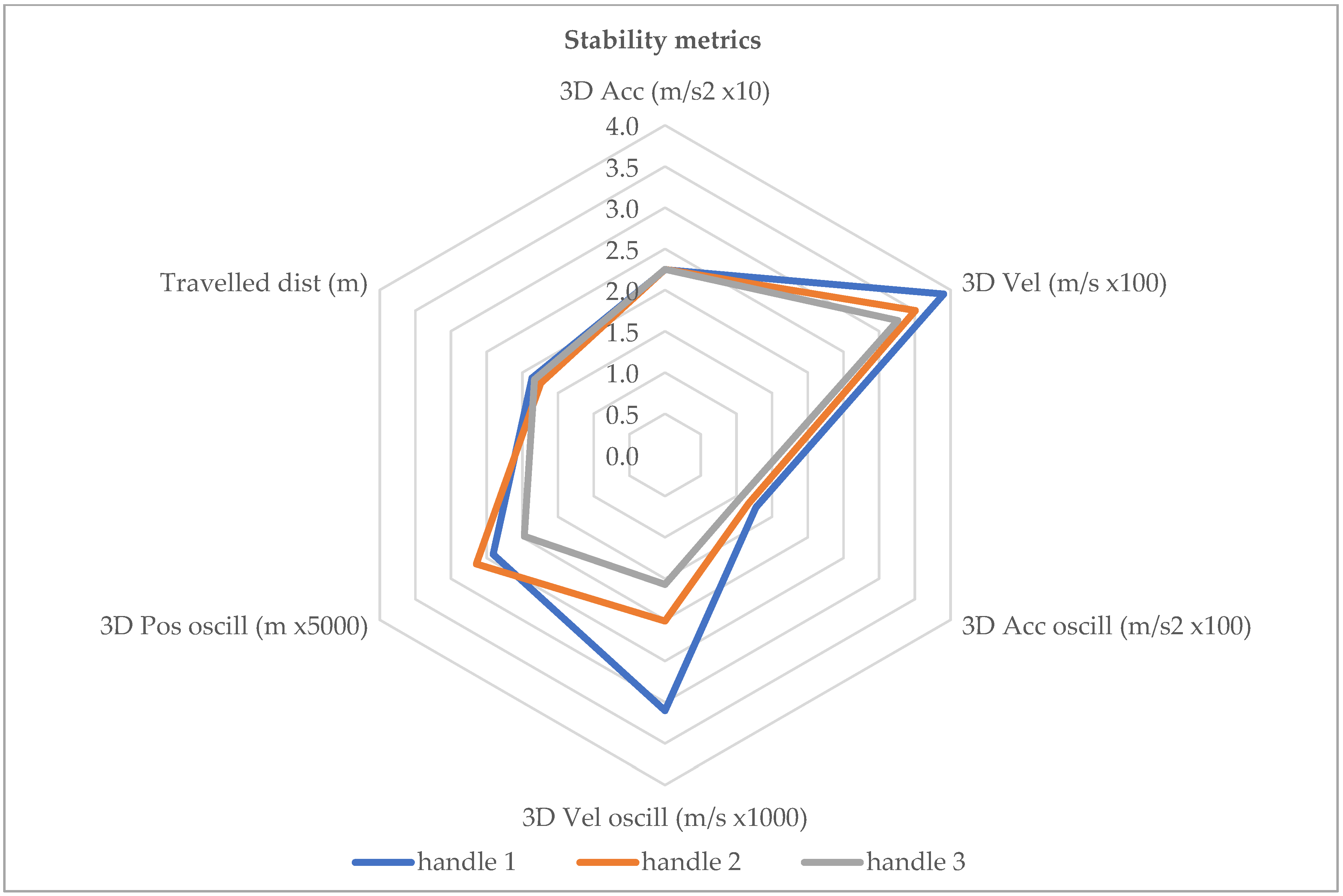
2.6. Partial Times and Stability Metrics Measurement
- (1)
- Mean acceleration (Equation (1)): the resultant acceleration was computed as the norm of the X, Y, and Z components of the acceleration of the device; then, the average value of this resultant acceleration during the task was computed:
- (2)
- Mean velocity: the same as the mean acceleration, but for the velocity of the device;
- (3)
- Oscillations of the acceleration: this was obtained from the standard deviation of the signal of the resultant acceleration;
- (4)
- Oscillations of the velocity: the same as for the acceleration;
- (5)
- Oscillations of the position: the same as for the acceleration/velocity;
- (6)
- Traveled distance (Equation (2)): sum of all the displacements of the device in the 3D space; this was calculated with the position of the device during the task—the Euclidean distance between the position of the device in every two consecutive instants was calculated, and the sum of all these distances resulted in the traveled distance.
2.7. Physical Workload—Kinematics Analysis of the Recruited Upper Limb
2.8. Physical Workload—EMG of the Recruited Upper Limb
2.9. Statistical Analysis
3. Results
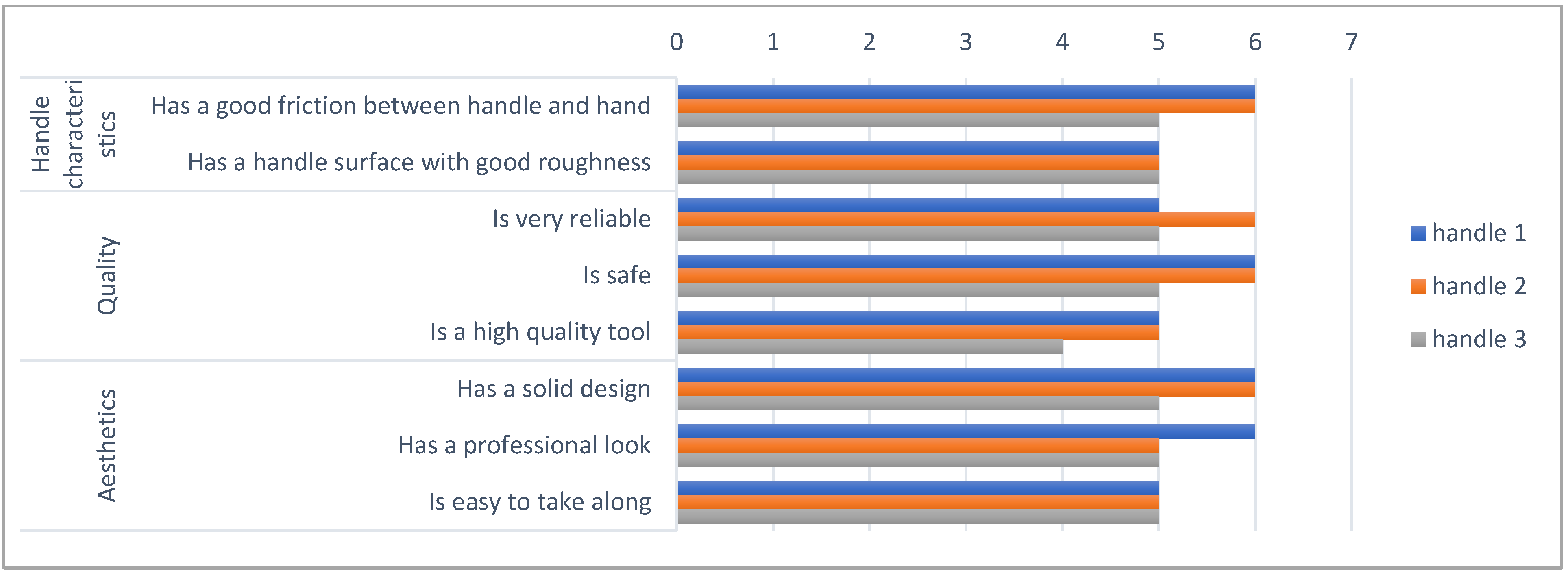
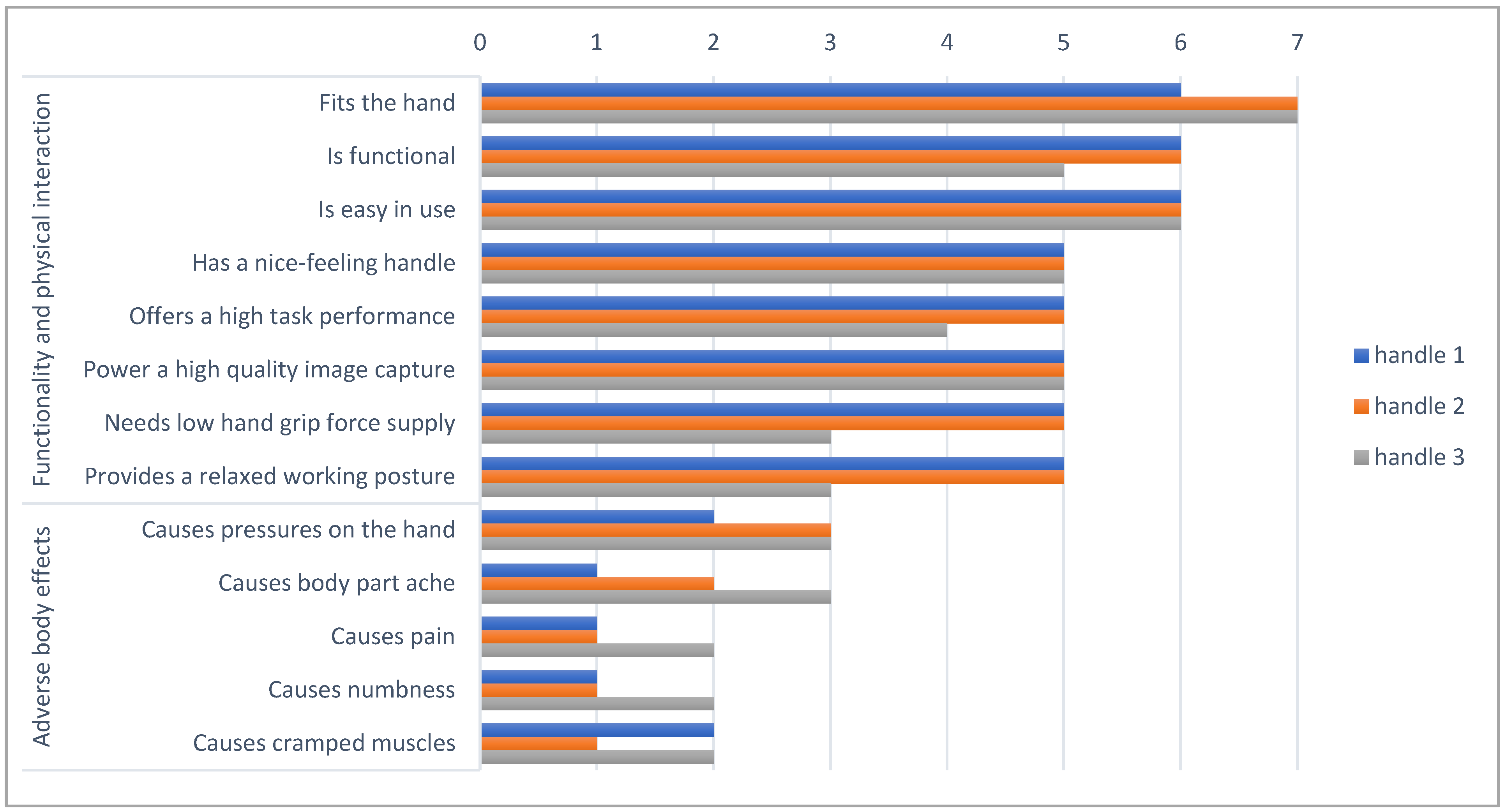
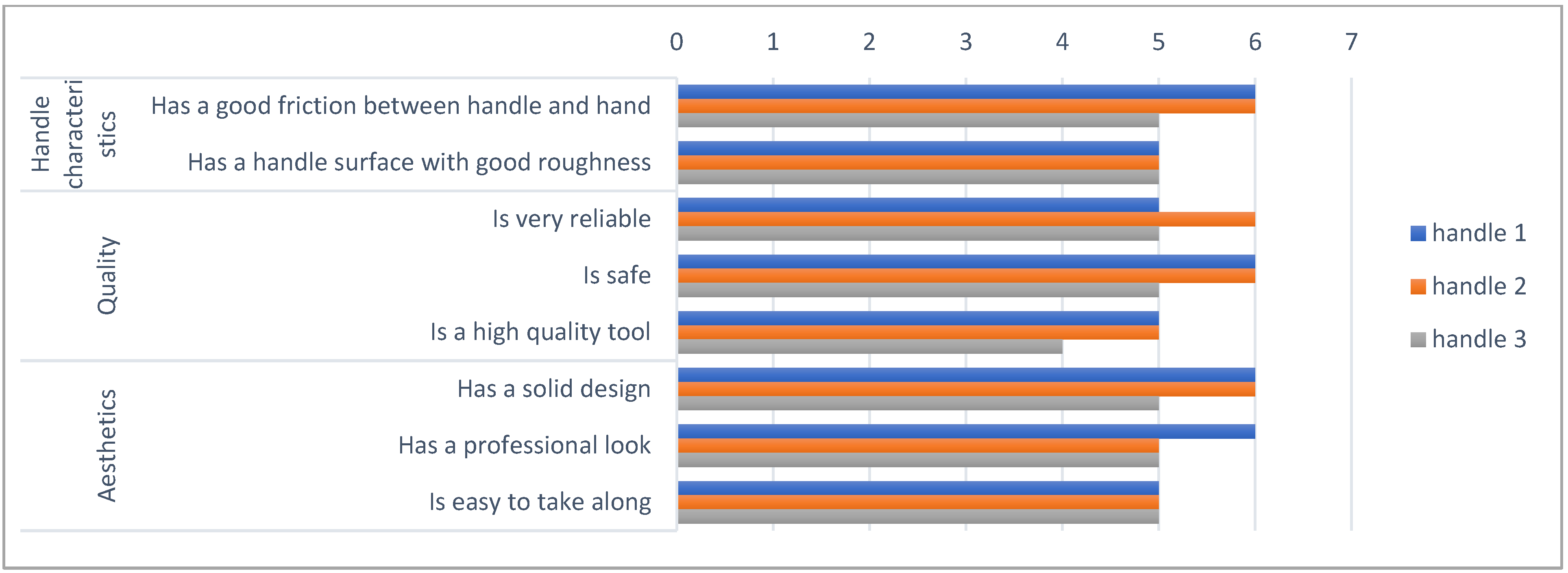
3.1. Participants Perceived Comfort
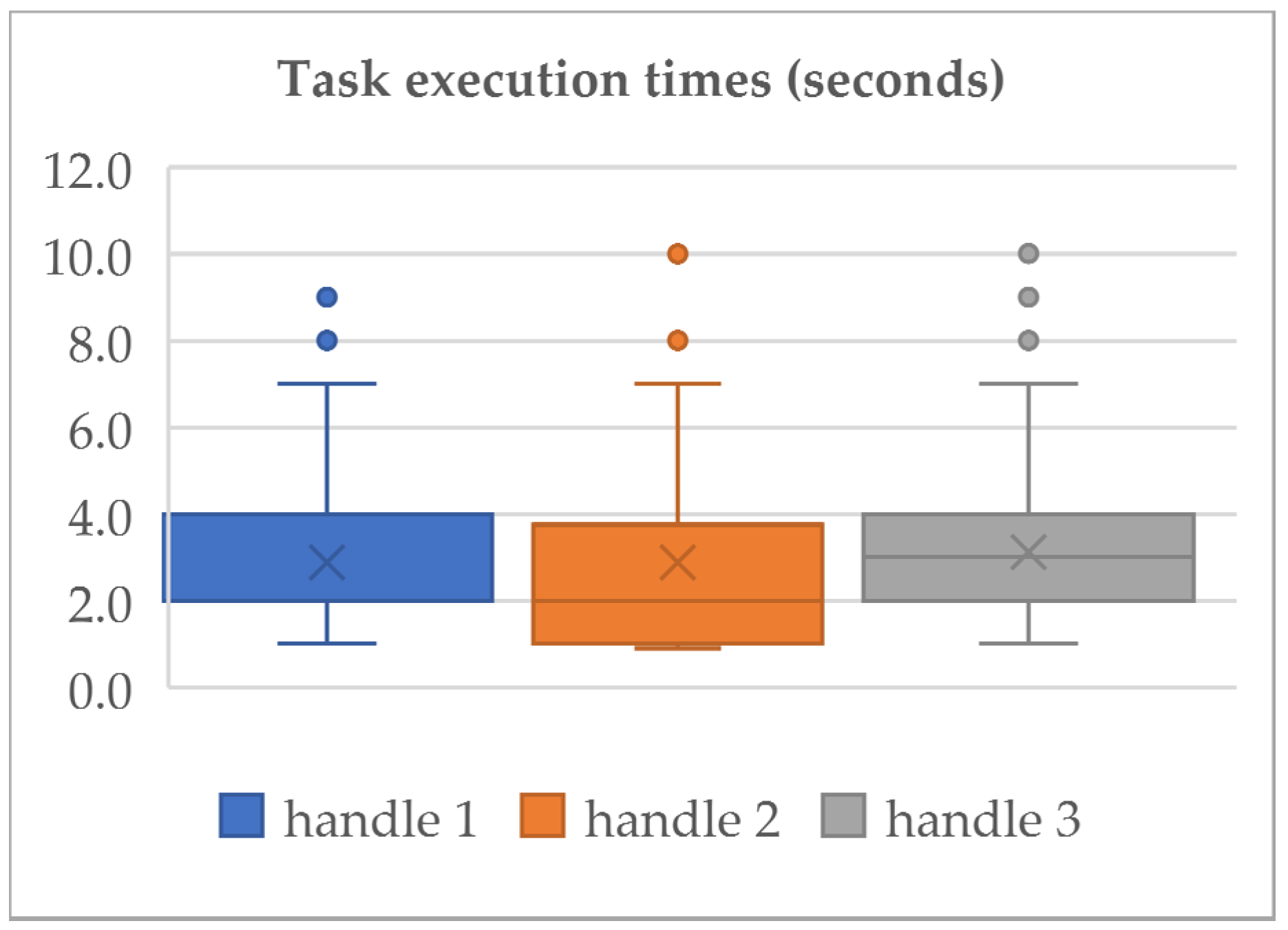
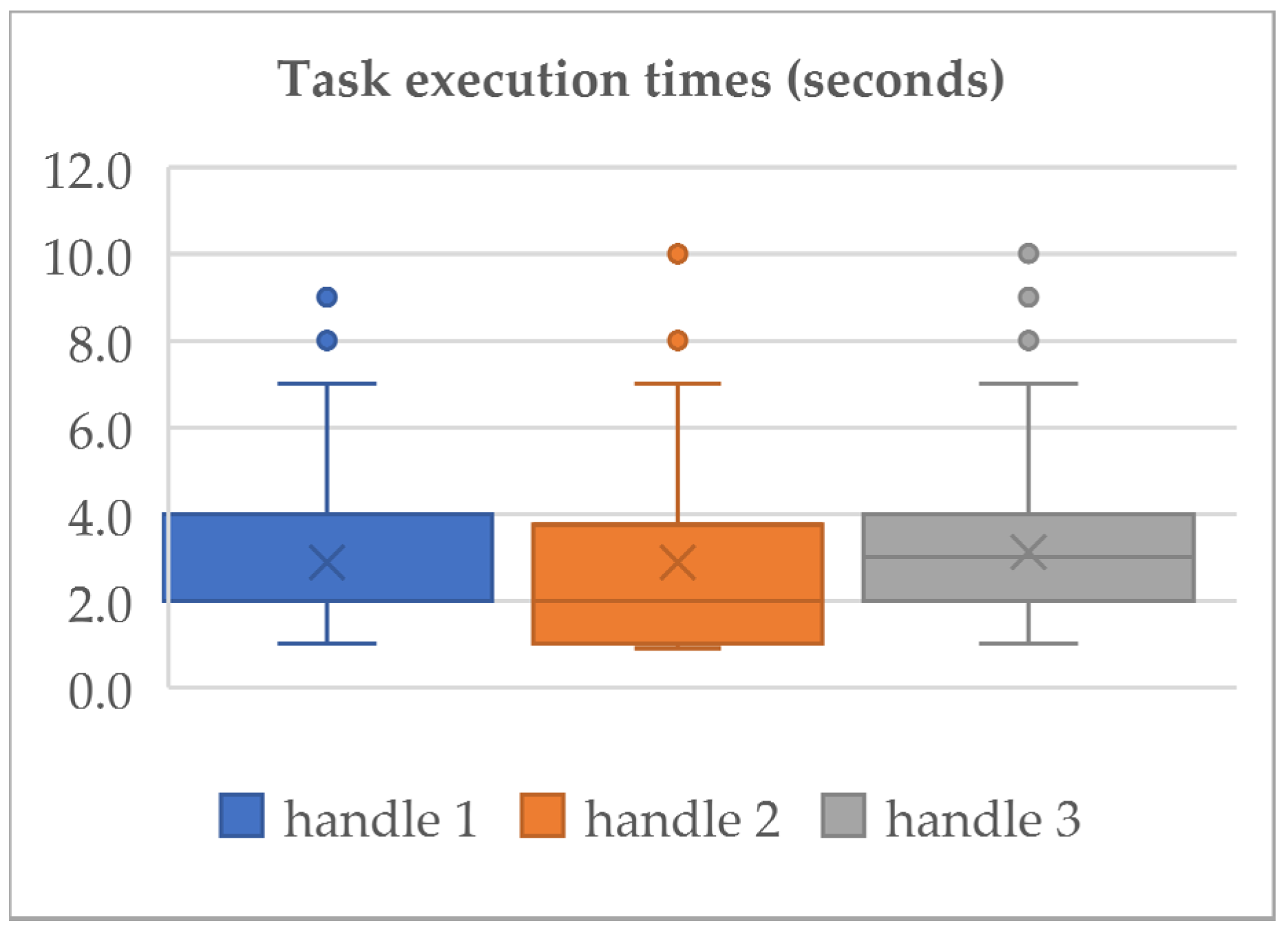
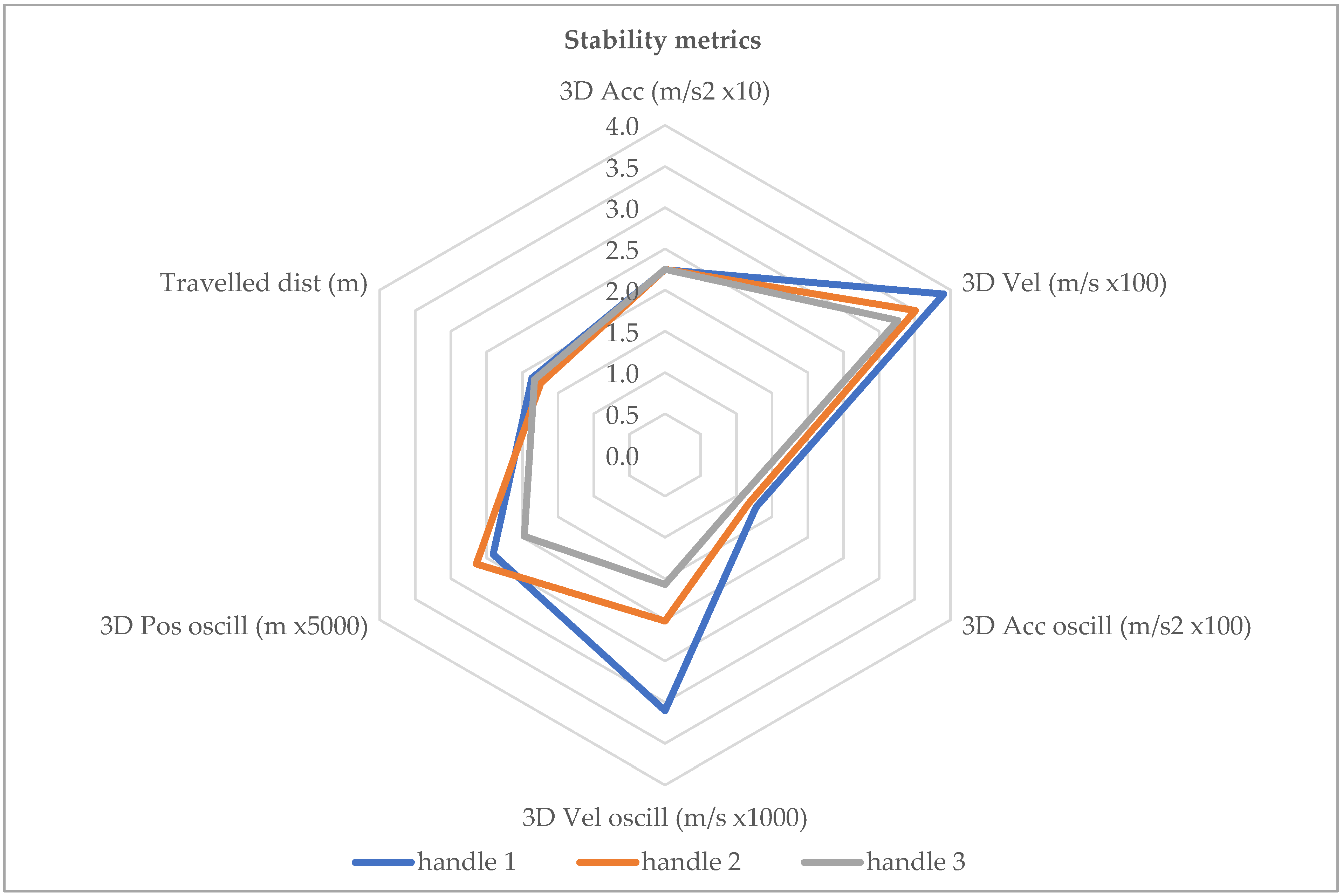
3.2. Partial Times and Stability Metrics
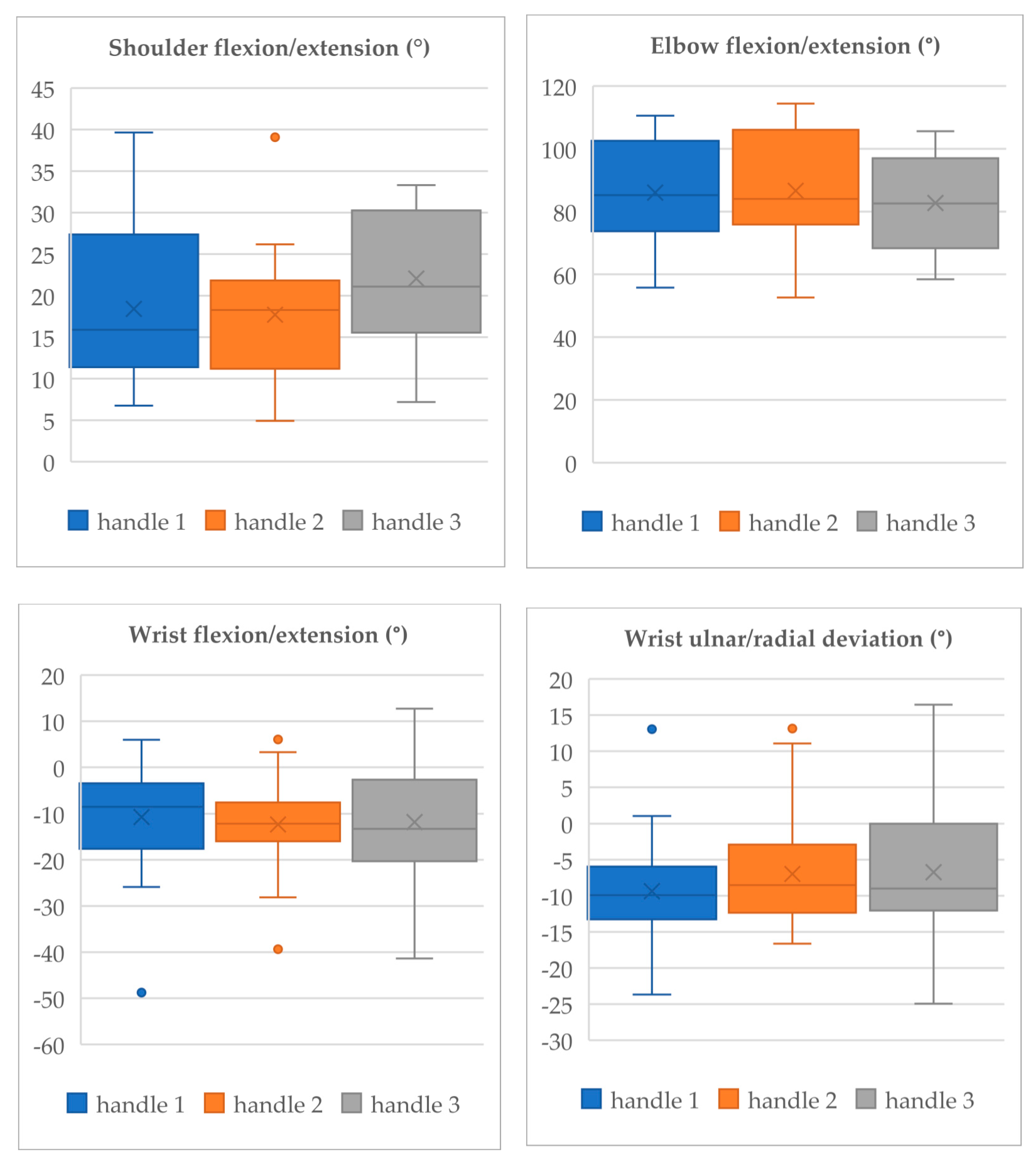
3.3. Kinematics Results of the Recruited Upper Limb
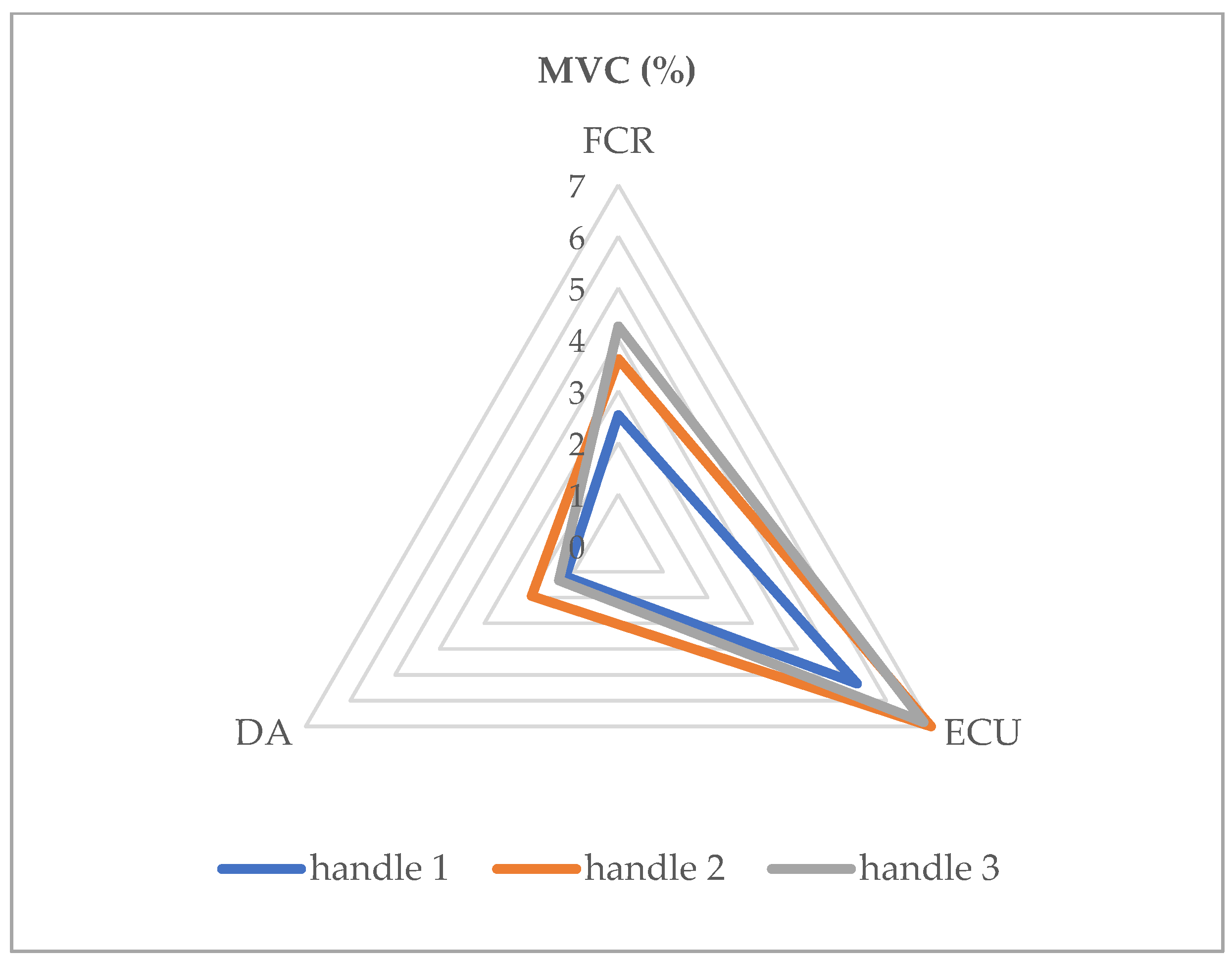
3.4. EMG Results of the Recruited Upper Limb
3.5. Global Statistics Results and Comparison between Handles
4. Discussion
4.1. Global Results
- (1)
- According to the participant’s perceptions, the most comfortable is “handle 1”, and “handle 3” is the most uncomfortable;
- (2)
- All handles have a similar effect on the stability of the device and on the efficiency of the task (estimated by the partial times);
- (3)
- A statistically significant shoulder deviation relative to the neutral posture is induced “handle 3”, which leads to higher joint biomechanical stress;
- (4)
- Different handles have a different impact on the EMG of the recruited arm, and generally, “handle 1” seems to contribute to a smaller muscle activity/effort.
4.2. Strengths and Limitations
4.3. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| WMSD | Work-related musculoskeletal disorders |
| EMG | Electromyographic |
| IMU | Inertial measurement units |
| EWA | Ergonomic workplace analysis |
| RULA | Rapid upper limb assessment |
| NASA-TLX | NASA Task Load Index |
| DA | Deltoideus anterior |
| ECU | Extensor carpi ulnaris |
| FCR | Flexor carpi radialis |
| MVC | Maximum voluntary contraction |
Appendix A. Results of Preliminary Statistical Tests: Normality and Sphericity Tests

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Handle 1 | Handle 2 | Handle 3 |
|---|---|---|---|
| Task execution time | 1.26 × 10−7 | 1.48 × 10−7 | 4.57 × 10−7 |
| 3D acceleration | 0.037 | 0.482 * | 0.122 * |
| 3D velocity | 1.48 × 10−4 | 0.285 * | 0.374 * |
| Oscillations of the acceleration | 2.86 × 10−4 | 0.018 | 5.49 × 10−5 |
| Oscillations of the velocity | 7.16 × 10−7 | 0.001 | 0.004 |
| Oscillations of the position | 0.001 | 0.023 | 1.40 × 10−5 |
| Traveled distance | 0.185 * | 0.633 * | 0.208 * |
| Shoulder flexion/extension | 0.071 | 0.071 | 0.253 |
| Elbow flexion/extension | 0.262 | 0.280 | 0.125 |
| Wrist flexion/extension | 0.023 | 0.167 | 0.934 |
| Wrist ulnar/radial deviation | 0.136 | 0.020 | 0.260 |
| EMG—DA | 0.277 * | 0.008 | 0.007 |
| EMG—FCR | 0.019 | 9.5 × 10−6 | 8.2 × 10−6 |
| EMG—ECU | 2.7 × 10−5 | 0.380 * | 0.070 * |
| Variable | p-Value |
|---|---|
| Task execution time | 0.764 |
| 3D acceleration | 0.765 |
| 3D velocity | 0.329 |
| Oscillations of the acceleration | 0.759 |
| Oscillations of the velocity | 0.297 |
| Oscillations of the position | 0.870 |
| Traveled distance | 0.181 |
| Shoulder flexion/extension | 0.572 |
| Elbow flexion/extension | 0.786 |
| Wrist flexion/extension | 0.546 |
| Wrist ulnar/radial deviation | 0.391 |
| EMG—DA | 0.147 |
| EMG—FCR | 0.732 |
| EMG—ECU | 0.881 |
References
- Parent-Thirion, A.; Biletta, I.; Cabrita, J.; Llave Vargas, O.; Vermeylen, G.; Wilczynska, A.; Wilkens, M. 6th European Working Conditions Survey: Overview Report; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- EU-OSHA. Work-Related Musculoskeletal Disorders: Prevalence, Costs and Demographics in the EU; Publications Office of the European Union: Luxembourg, 2019. [Google Scholar] [CrossRef]
- Pheasant, S. Bodyspace: Anthropometry, Ergonomics and the Design of Work, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2003; Volume 27. [Google Scholar]
- Marsot, J.; Claudon, L. Design and Ergonomics. Methods for Integrating Ergonomics at Hand Tool Design Stage. Int. J. Occup. Saf. Ergon. 2004, 10, 13–23. [Google Scholar] [CrossRef]
- HSE. Assessment of Repetitive Tasks of the Upper Limbs (the ART Tool); HSE: London, UK, 2010. [Google Scholar]
- Garg, A.; Moore, J.S.; Kapellusch, J.M. The Revised Strain Index: An Improved Upper Extremity Exposure Assessment Model. Ergonomics 2017, 60, 912–922. [Google Scholar] [CrossRef]
- Rossi, J.; Berton, E.; Grélot, L.; Barla, C. Characterisation of Forces Exerted by the Entire Hand during the Power Grip: Effect of the Handle Diameter. Ergonomics 2012, 55, 682–692. [Google Scholar] [CrossRef] [PubMed]
- CCOHS. Hand Tool Ergonomics—Tool Design. Available online: https://www.ccohs.ca/oshanswers/ergonomics/handtools/tooldesign.html (accessed on 1 August 2023).
- Seo, N.J.; Armstrong, T.J.; Young, J.G. Effects of Handle Orientation, Gloves, Handle Friction and Elbow Posture on Maximum Horizontal Pull and Push Forces. 2010, 53, 92–101. Ergonomics 2010, 53, 92–101. [Google Scholar] [CrossRef] [PubMed]
- La Delfa, N.J.; Evans, Z.C.T.; Potvin, J.R. The Influence of Hand Location and Handle Orientation on Female Manual Arm Strength. Appl. Ergon. 2019, 81, 102896. [Google Scholar] [CrossRef]
- Çakmak, B.; Ergül, E. Interactions of Personal and Occupational Risk Factors on Hand Grip Strength of Winter Pruners. Int. J. Ind. Ergon. 2018, 67, 192–200. [Google Scholar] [CrossRef]
- Beuß, F.; Sender, J.; Flügge, W. Ergonomics Simulation in Aircraft Manufacturing—Methods and Potentials. Procedia CIRP 2019, 81, 742–746. [Google Scholar] [CrossRef]
- Jorgensen, M.J.; Hakansson, N.A.; Desai, J. International Journal of Industrial Ergonomics the Impact of Passive Shoulder Exoskeletons during Simulated Aircraft Manufacturing Sealing Tasks. Int. J. Ind. Ergon. 2022, 91, 103337. [Google Scholar] [CrossRef]
- Veisi, H.; Choobineh, A.; Ghaem, H.; Shafiee, Z. The Effect of Hand Tools’ Handle Shape on Upper Extremity Comfort and Postural Discomfort among Hand-Woven Shoemaking Workers. Int. J. Ind. Ergon. 2019, 74, 102833. [Google Scholar] [CrossRef]
- Adeleye, A.A.; Alabdulkarim, S.A.; Nussbaum, M.A. Impacts of Different Fabric Scissor Designs on Physical Demands and Performance in Simulated Fabric Cutting Tasks. Appl. Ergon. 2020, 89, 103219. [Google Scholar] [CrossRef]
- Kuijt-Evers, L.F.M.; Bosch, T.; Huysmans, M.A.; de Looze, M.P.; Vink, P. Association between Objective and Subjective Measurements of Comfort and Discomfort in Hand Tools. Appl. Ergon. 2007, 38, 643–654. [Google Scholar] [CrossRef] [PubMed]
- Kuijt-Evers, L.F.M.; Twisk, J.; Groenesteijn, L.; De Looze, M.P.; Vink, P. Identifying Predictors of Comfort and Discomfort in Using Hand Tools. Ergonomics 2005, 48, 692–702. [Google Scholar] [CrossRef] [PubMed]
- Asadi, H.; Yu, D.; Mott, J.H. Risk Factors for Musculoskeletal Injuries in Airline Maintenance, Repair & Overhaul. Int. J. Ind. Ergon. 2019, 70, 107–115. [Google Scholar] [CrossRef]
- Arkhipov, D.; Battaïa, O.; Cegarra, J.; Lazarev, A. Operator Assignment Problem in Aircraft Assembly Lines: A New Planning Approach Taking into Account Economic and Ergonomic Constraints. Procedia CIRP 2018, 76, 63–66. [Google Scholar] [CrossRef]
- Colim, A.; Alexandre, R.; Cardoso, A.; Pereira, D.; Lima, P.; Silva, M.; Mould, S. Towards the Digital Transformation of Inspection Tasks in Aircraft Manufacturing Through a Human-Centric Design. In Occupational and Environmental Safety and Health IV; Springer: Berlin/Heidelberg, Germany, 2022; pp. 211–220. [Google Scholar]
- Abbas, A.; Seo, J.; Kim, M. Exploring the Construction Task Performance and Cognitive Workload of Augmented Reality-Assisted Rebar Inspection Tasks. In Proceedings of the Construction Research Congress 2020, Tempe, AZ, USA, 8–10 March 2020; ASCE: Reston, VA, USA, 2020; pp. 448–456. [Google Scholar]
- Wang, X.; Dunston, P.S. Compatibility Issues in Augmented Reality Systems for AEC: An Experimental Prototype Study. Autom. Constr. 2006, 15, 314–326. [Google Scholar] [CrossRef]
- Nahavandi, S. Industry 5.0—A Human-Centric Solution. Sustainability 2019, 11, 4371. [Google Scholar] [CrossRef]
- Cotta, J.; Breque, M.; De-Nul, L.; Petridis, A. Industry 5.0—Towards a Sustainable, Human-Centric and Resilient European Industry; European Comission: Brussels, Belgium, 2021. [Google Scholar] [CrossRef]
- Ahonen, M.; Launis, M.; Kuorinka, T. Ergonomic Workplace Analysis; Ergonomics Section; Institute of Occupational Health: Wigston, UK, 1989. [Google Scholar]
- McAtamney, L.; Corlett, N. RULA: A Survey Method for the Investigation of Work-Related Upper Limb Disorders. Appl. Ergon. 1993, 24, 91–99. [Google Scholar] [CrossRef]
- Hart, S.G. NASA-Task Load Index (NASA-TLX); 20 Years Later. Proc. Hum. Factors Ergon. Soc. 2006, 50, 904–908. [Google Scholar] [CrossRef]
- González, A.G.; Barrios-muriel, J.; Romero-sánchez, F.; Salgado, D.R.; Alonso, F.J. Ergonomic Assessment of a New Hand Tool Design for Laparoscopic Surgery Based on Surgeons’ Muscular Activity. Appl. Ergon. 2020, 88, 103161. [Google Scholar] [CrossRef]
- Harih, G.; Dolšak, B. Comparison of Subjective Comfort Ratings between Anatomically Shaped and Cylindrical Handles. Appl. Ergon. 2014, 45, 943–954. [Google Scholar] [CrossRef]
- Colim, A.; Arezes, P.; Flores, P.; Monteiro, P.R.R.; Mesquita, I.; Braga, A.C. Obesity Effects on Muscular Activity during Lifting and Lowering Tasks. Int. J. Occup. Saf. Ergon. 2021, 27, 217–225. [Google Scholar] [CrossRef] [PubMed]
- Finstad, K. Response Interpolation and Scale Sensitivity: Evidence Against 5-Point Scales. J. Usability Stud. 2010, 5, 104–110. [Google Scholar]
- Guo, L.; Kou, J.; Xiong, S. Subjective and Objective Measures to Assess Postural Instability: Their Linear Correlations and Abilities to Detect Effects of Work-Related Factors. In Advances in Physical, Social & Occupational Ergonomics. AHFE 2020. Advances in Intelligent Systems and Computing; Karwowski, W., Goonetilleke, R., Xiong, S., Goossens, R., Murata, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Colim, A.; Cardoso, A.; Arezes, P.; Braga, A.C.; Peixoto, A.C.; Peixoto, V.; Wolbert, F.; Carneiro, P.; Costa, N.; Sousa, N. Digitalization of Musculoskeletal Risk Assessment in a Robotic-Assisted Assembly Workstation. Safety 2021, 7, 74. [Google Scholar] [CrossRef]
- Schepers, M.; Giuberti, M.; Bellusci, G. Xsens MVN: Consistent Tracking of Human Motion Using Inertial Sensing; Xsens Technologies Technical Report; Xsens Technologies B.V.: Enschede, The Netherlands, 2018; pp. 1–8. [Google Scholar]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors; Xsens Technologies B.V.: Enschede, The Netherlands, 2009; pp. 1–7. [Google Scholar]
- SENIAM.org. Enschede: Surface Electromyography for the Non-Invasive Assessment of Muscles Project. Available online: www.seniam.org (accessed on 25 April 2022).
- Gurnani, N.; Willems, W.J.; van Deurzen, D.F.P.; Weening, A.A.; Bouwer, J.; Janssen, T.W.J.; Veeger, D.H.E.J. Shoulder Kinematics and Muscle Activity Following Latissimus Dorsi Transfer for Massive Irreparable Posterosuperior Rotator Cuff Tears in a Pseudoparalytic Shoulder. J. Shoulder Elb. Surg. 2022, 31, 1357–1367. [Google Scholar] [CrossRef] [PubMed]
- Konrad, P. The ABC of EMG; Noraxon Inc.: Scottsdale, AZ, USA, 2005. [Google Scholar]
- Mishra, S.; Kannan, S.; Manager, C.; Statistics, A.; Comments, R.; Alert, E. Get Started Now. Indian J. Occup. Int. Med. 2019, 23, 8–13. [Google Scholar] [CrossRef]
- Yap, B.W. Power Comparisons of Shapiro-Wilk, Kolmogorov-Smirnov, Lilliefors and Power Comparisons of Shapiro-Wilk, Kolmogorov-Smirnov, Lilliefors and Anderson-Darling Tests. J. Stat. Model. Anal. 2011, 2, 21–33. [Google Scholar]
- Nordstokke, D.; Zumbo, B.D. A New Nonparametric Levene Test for Equal Variances A Ew Onparametric Levene Test for Equal Variances. Psicológica J. 2010, 31, 401–430. [Google Scholar]
- Midway, S.; Robertson, M.; Flinn, S.; Kaller, M. Comparing Multiple Comparisons: Practical Guidance for Choosing the Best Multiple Comparisons Test. PeerJ 2020, 8, e10387. [Google Scholar] [CrossRef]
- Sancibrian, R.; Redondo-Figuero, C.; Gutierrez-Diez, M.C.; Gonzalez-Sarabia, E.; Manuel-Palazuelos, J.C. Ergonomic Evaluation and Performance of a New Handle for Laparoscopic Tools in Surgery. Appl. Ergon. 2020, 89, 103210. [Google Scholar] [CrossRef]
- Simonetto, M.; Arena, S.; Peron, M. A Methodological Framework to Integrate Motion Capture System and Virtual Reality for Assembly System 4.0 Workplace Design. Saf. Sci. 2022, 146, 105561. [Google Scholar] [CrossRef]



| Variable | Handle 1/Handle 2 | Handle 1/Handle 3 | Handle 2/Handle 3 |
|---|---|---|---|
| Partial time | 0.581 | 0.991 | 0.555 |
| 3D acceleration | 0.971 | 0.971 | 0.999 |
| 3D velocity | 0.402 | 0.144 | 0.301 |
| Oscillations of the acceleration | 0.649 | 0.260 | 0.593 |
| Oscillations of the velocity | 0.306 | 0.131 | 0.235 |
| Oscillations of the position | 0.695 | 0.523 | 0.396 |
| Traveled distance | 0.370 | 0.854 | 0.580 |
| Shoulder flexion/extension | 0.606 | 0.065 | 0.023 * |
| Elbow flexion/extension | 0.651 | 0.077 | 0.057 |
| Wrist flexion/extension | 0.328 | 0.555 | 0.756 |
| Wrist ulnar/radial deviation | 0.054 | 0.122 | 0.785 |
| EMG—DA | 0.011 * | 0.512 | 0.044 * |
| EMG—FCR | 0.157 | 0.020 * | 0.255 |
| EMG—ECU | 0.110 | 0.045 * | 0.854 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Colim, A.; Pereira, D.; Lima, P.; Cardoso, A.; Almeida, R.; Fernandes, D.; Mould, S.; Arezes, P. Designing a User-Centered Inspection Device’s Handle for the Aircraft Manufacturing Industry. Appl. Sci. 2023, 13, 11584. https://doi.org/10.3390/app132011584
Colim A, Pereira D, Lima P, Cardoso A, Almeida R, Fernandes D, Mould S, Arezes P. Designing a User-Centered Inspection Device’s Handle for the Aircraft Manufacturing Industry. Applied Sciences. 2023; 13(20):11584. https://doi.org/10.3390/app132011584
Chicago/Turabian StyleColim, Ana, Débora Pereira, Pedro Lima, André Cardoso, Rui Almeida, Duarte Fernandes, Sacha Mould, and Pedro Arezes. 2023. "Designing a User-Centered Inspection Device’s Handle for the Aircraft Manufacturing Industry" Applied Sciences 13, no. 20: 11584. https://doi.org/10.3390/app132011584
APA StyleColim, A., Pereira, D., Lima, P., Cardoso, A., Almeida, R., Fernandes, D., Mould, S., & Arezes, P. (2023). Designing a User-Centered Inspection Device’s Handle for the Aircraft Manufacturing Industry. Applied Sciences, 13(20), 11584. https://doi.org/10.3390/app132011584