
A Novel Distributed Optical Fiber Temperature Sensor Based on Raman anti-Stokes Scattering Light
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principle of the Commonly Used Temperature Demodulation
3. The Optimized Raman anti-Stokes Light-Based Demodulation Method
4. Experiment and Results Discussion
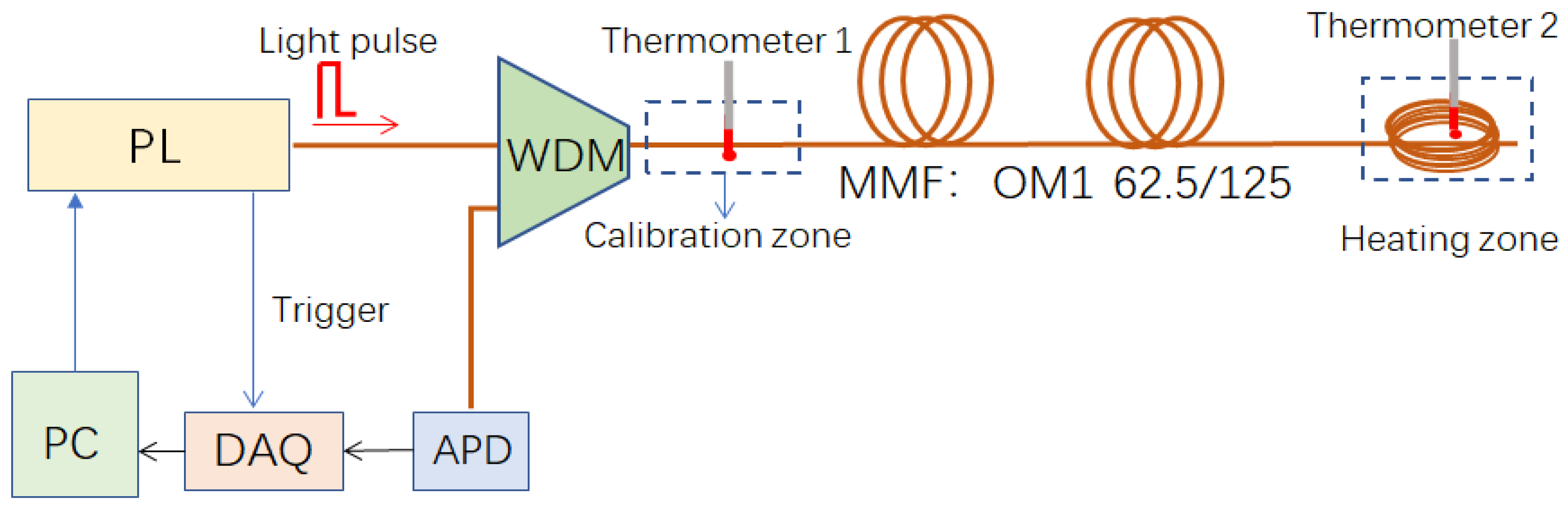
4.1. Experimental Set-Up
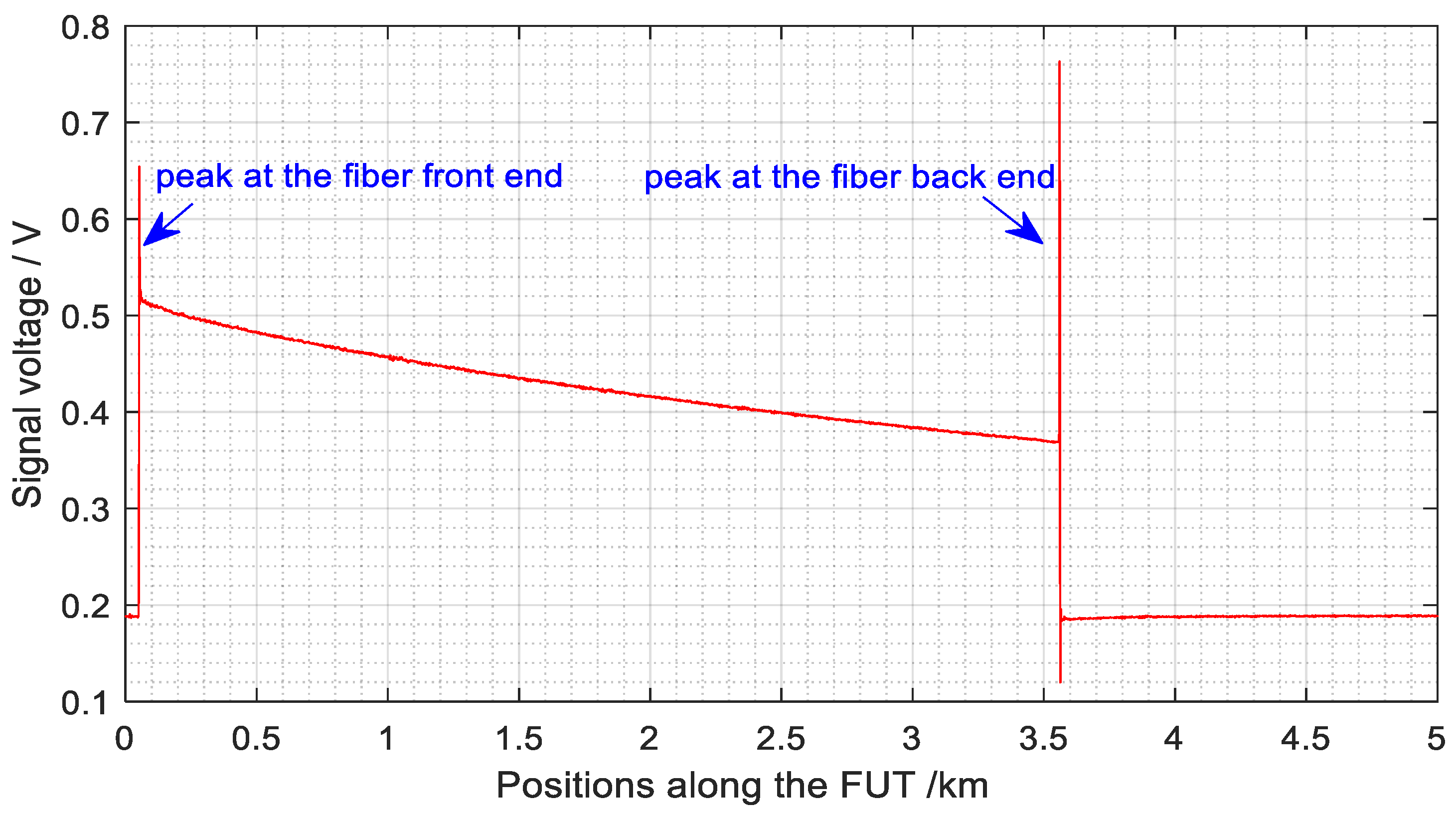
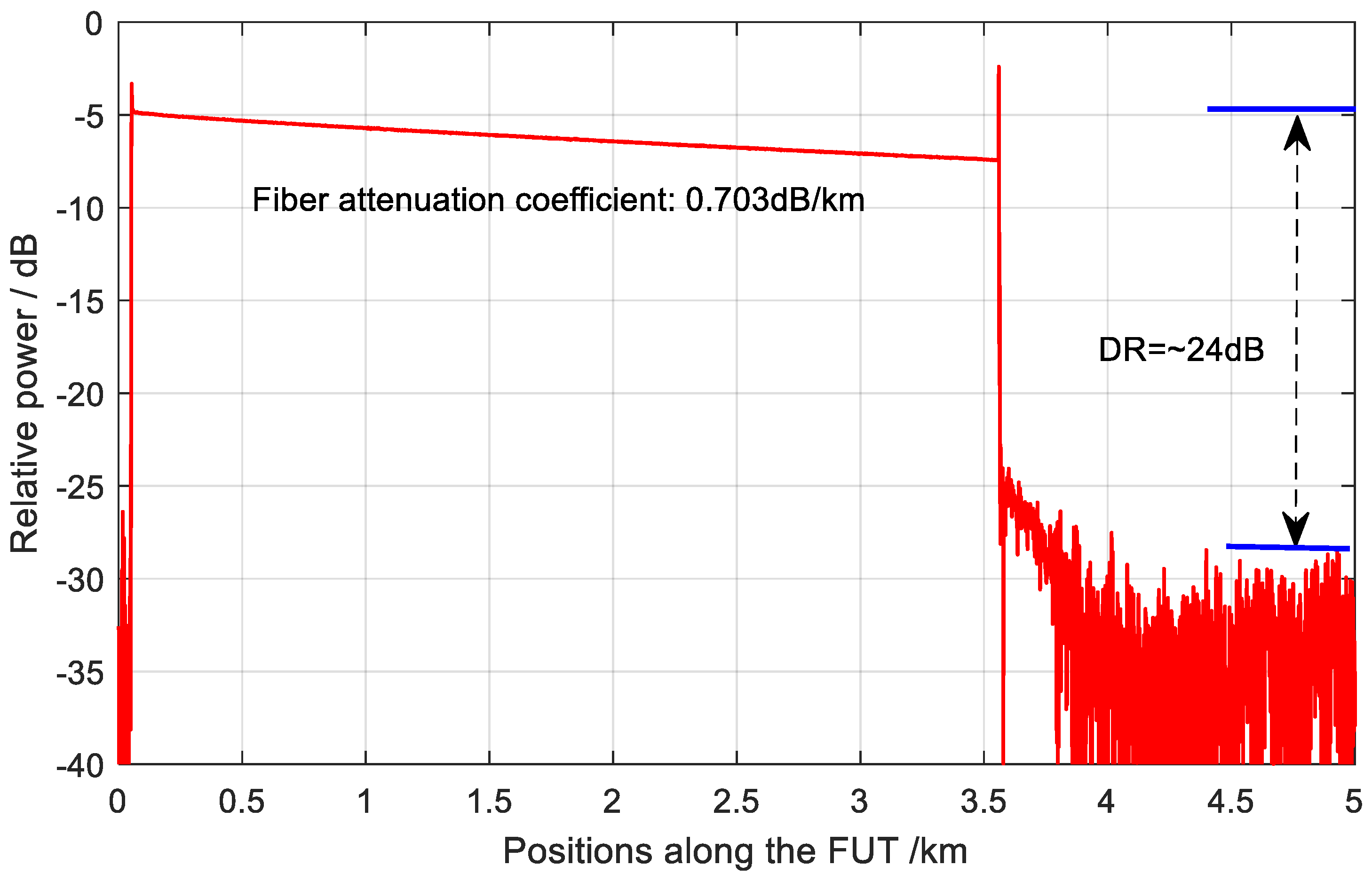
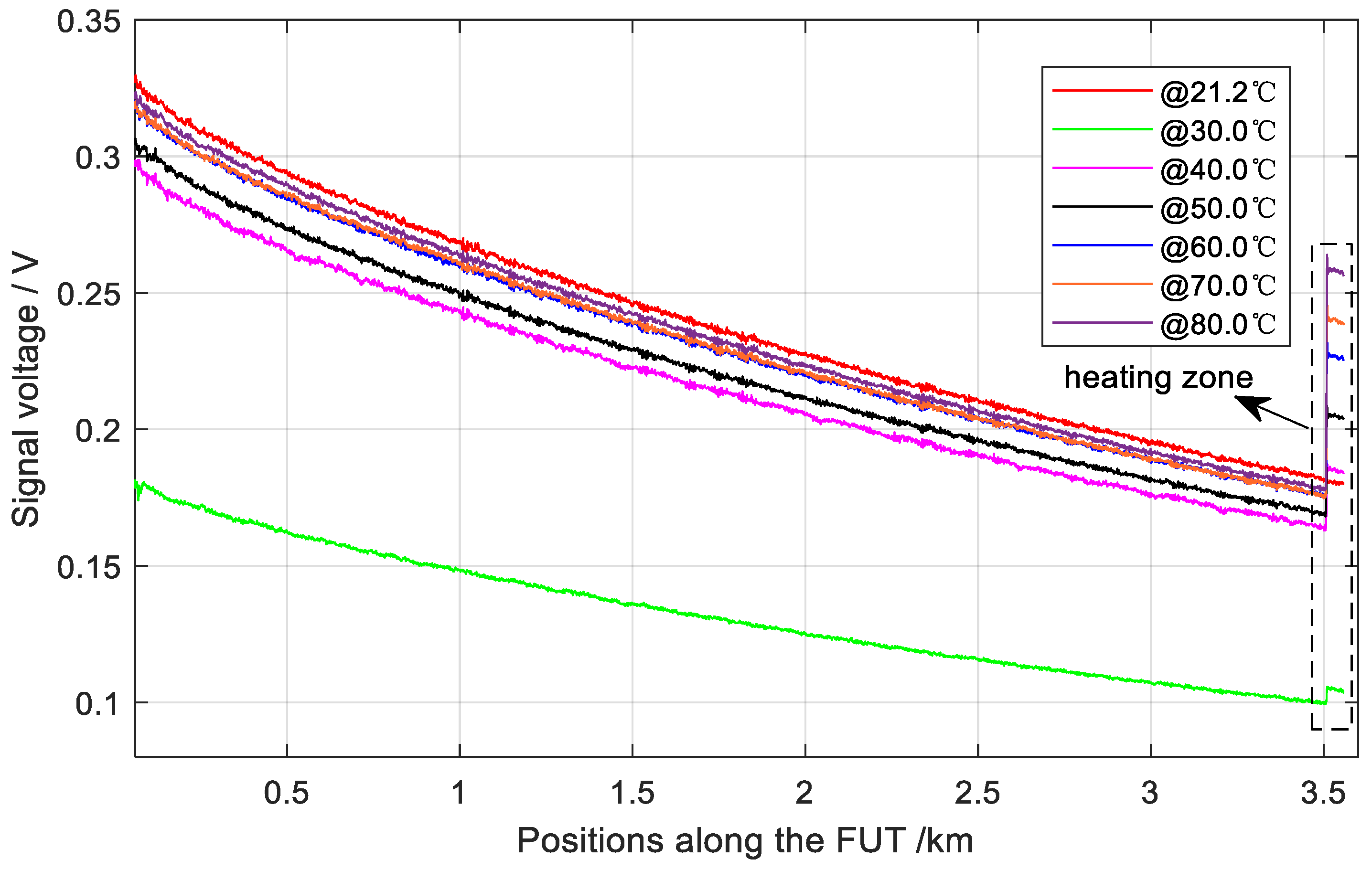
4.2. Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dakin, J.; Pratt, D.; Bibby, G.; Ross, J. Distributed optical fibre Raman temperature sensor using a semiconductor light source and detector. Electron. Lett. 1985, 21, 569–570. [Google Scholar] [CrossRef]
- Dakin, J.; Pratt, D.; Bibby, G.; Ross, J. Temperature distribution measurement using Raman ratio thermometry. In Proceedings of the SPIE Fiber Optic and Laser Sensors III, San Diego, CA, USA, 3 January 1986. [Google Scholar]
- Seabrook, B.; Ellmauthaler, A.; LeBlanc, M.; Jaaskelainen, M.; Maida, J.; Wilson, G. Comparison of Raman, Brillouin, and Rayleigh Distributed Temperature Measurements in High-Rate Wells. Petrophysics 2022, 63, 685–699. [Google Scholar]
- Pendão, C.; Silva, I. Optical Fiber Sensors and Sensing Networks: Overview of the Main Principles and Applications. Sensors 2022, 22, 7554. [Google Scholar] [CrossRef]
- Lu, L.; Su, X.; Zhang, C.; Gao, Q.; Bu, X. Study on the Efficiency of Temperature/Strain Measurement for Ultra-Long-Distance Optical Fiber Composite Overhead Power Transmission Lines. Appl. Sci. 2022, 12, 11043. [Google Scholar] [CrossRef]
- Philen, D.; White, I.; Kuhl, J.; Mettler, S. Single-Mode Fiber OTDR: Experiment and Theory. IEEE Trans. Microw. Theory Tech. 1982, 30, 1487–1496. [Google Scholar] [CrossRef]
- Gunes, Y.; Sait, E. A distributed optical fiber sensor for temperature detection in power cables. Sens. Actuators A Phys. 2006, 125, 148–155. [Google Scholar]
- Ma, G.; Wang, Y.; Qin, W.; Zhou, H.; Yan, C.; Jiang, J.; Ju, Y. Optical sensors for power transformer monitoring: A review. High Voltage 2021, 6, 367–386. [Google Scholar] [CrossRef]
- Lalam, N.; Syed, I.; Karki, D.; Weisenberg, K.; Wright, R.; Ohodnicki, P. Robotic fiber optic internal deployment tool for pipeline integrity monitoring. In Proceedings of the Fiber Optic Sensors and Applications XVIII 2022, Orlando, FL, USA, 3–7 April 2022. [Google Scholar]
- Yin, J.; Li, Z.; Liu, Y.; Liu, K.; Chen, J.; Xie, T.; Shi, B. Toward establishing a multiparameter approach for monitoring pipeline geohazards via accompanying telecommunications dark fiber. Opt. Fib. Technol. 2022, 68, 102765. [Google Scholar] [CrossRef]
- Silva, M.; Alves, H.; Oliveira, H.; Leão, L.; Nascimento, J.; Martins-Filho, J. Temperature, Refractive Index, and Corrosion Simultaneous Monitoring Using Raman Anti-Stokes Reflectometric Optical Fiber Sensor. IEEE Trans. Instrum. Meas. 2023, 72, 3277928. [Google Scholar] [CrossRef]
- Zhao, F.; Zhang, S.; Zhao, H.; Yu, L.; Feng, Q.; He, J. An intelligent optical fiber-based prewarning system for oil and gas pipelines. Opt. Fib. Technol. 2022, 71, 102953. [Google Scholar] [CrossRef]
- Kikuchi, K.; Naito, T.; Okoshi, T. Measurement of Raman scattering in single-mode optical fiber by optical time-domain reflectometry. IEEE J. Quan. Electron. 1988, 24, 1973–1975. [Google Scholar] [CrossRef]
- Li, J.; Zhang, M. Physics and applications of Raman distributed optical fiber sensing. Light Sci. Appl. 2022, 11, 128. [Google Scholar] [CrossRef]
- Ip, E.; Fang, J.; Li, Y.; Wang, Q.; Huang, M.; Salemi, M.; Huang, Y. Distributed fiber sensor network using telecom cables as sensing media: Technology advancements and applications. J. Opt. Commun. Netw. 2022, 14, 61–68. [Google Scholar] [CrossRef]
- Soto, M.; Bolognini, G.; Di Pasquale, F. Analysis of optical pulse coding in spontaneous Brillouin-based distributed temperature sensors. Opt. Expr. 2008, 16, 19097–19111. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhou, X.; Yin, Z.; Wang, C.; Xu, Y.; Zhang, J.; Zhang, M. Reconstruction compression correlation demodulation for Raman optical time domain reflection. Adv. Photonics Res. 2021, 2, 2100047. [Google Scholar] [CrossRef]
- Li, J.; Wang, C.; Cao, K.; Fan, B.; Zhou, X.; Xu, Y.; Cheng, Z.; Zhang, Q.; Qiao, L.; Xue, X.; et al. Breakthrough the physical barrier on spatial resolution in Raman distributed fiber sensing using chaotic correlation demodulation. APL Photonics 2023, 8, 076105. [Google Scholar] [CrossRef]
- Bolognini, G.; Park, J.; Soto, M.; Park, N.; Di Pasquale, F. Analysis of distributed temperature sensing based on Raman scattering using OTDR coding and discrete Raman amplification. Meas. Sci. Technol. 2007, 18, 3211. [Google Scholar] [CrossRef]
- Park, J.; Bolognini, G.; Lee, D.; Kim, P.; Cho, P.; Di Pasquale, F.; Park, N. Raman-based distributed temperature sensor with simplex coding and link optimization. IEEE Photonics Technol. Lett. 2006, 18, 1879–1881. [Google Scholar] [CrossRef]
- Xu, Z.; Ling, J.; Ye, W.; Xu, Z.; Wang, W. Spatial Resolution Optimization technology of Raman OTDR Using Variable Sampling Rate. IEEE Sens. J. 2023, 23, 10500–10508. [Google Scholar] [CrossRef]
- Zhu, W.; Wu, H.; Chen, W.; Zhou, M.; Yin, G.; Guo, N.; Zhu, T. Submetric Spatial Resolution ROTDR Temperature Sensor Assisted by Wiener Deconvolution. Sensors 2022, 22, 9942. [Google Scholar] [CrossRef]
- Ghafoori, Y.; Vidmar, A.; Kryžanowski, A. A Dynamic Calibration of Optical Fiber DTS Measurements Using PEST and Reference Thermometers. Sensors 2022, 22, 3890. [Google Scholar] [CrossRef]
- Amira, Z.; Mohamed, B.; Tahar, E. Monitoring of temperature in distributed optical sensor: Raman and Brillouin spectrum. Optik 2016, 127, 4162–4166. [Google Scholar] [CrossRef]
- Lu, L.; Yong, M.; Wang, Q.; Bu, X.; Gao, Q. A hybrid distributed optical fiber vibration and temperature sensor based on optical Rayleigh and Raman scattering. Opt. Commun. 2023, 529, 129096. [Google Scholar] [CrossRef]
- Song, Y.; Chen, W.; Wan, F.; Zhang, Z.; Du, L.; Wang, P.; Li, J.; Wu, Z.; Huang, H. Online multi-parameter sensing and condition assessment technology for power cables: A review. Electr. Power Syst. Res. 2022, 210, 108140. [Google Scholar] [CrossRef]
- Datta, A.; Sankar, V.; Srinivasan, B. Challenges and opportunities in distributed anti-Stokes Raman thermometry. ISSS J. Micro Smart Syst. 2022, 11, 179–206. [Google Scholar] [CrossRef]
- Datta, A.; Mamidala, H.; Venkitesh, D.; Srinivasan, B. Reference-free real-time power line monitoring using distributed anti-Stokes Raman thermometry for smart power grids. IEEE Sens. J. 2019, 20, 7044–7052. [Google Scholar] [CrossRef]
- Savović, S.; Djordjevich, A.; Simović, A.; Drljača, B. Equilibrium mode distribution and steady-state distribution in 100–400 µm core step-index silica optical fibers. Appl. Opt. 2011, 50, 4170–4173. [Google Scholar] [CrossRef] [PubMed]
- King, J.; Smith, D.; Richards, K.; Timson, P.; Epworth, R.; Wright, S. Development of a coherent OTDR instrument. J. Light. Technol. 1987, 5, 616–624. [Google Scholar] [CrossRef]
- Izumita, H.; Koyamada, Y. The performance limit of coherent OTDR enhanced with optical fiber amplifiers due to optical nonlinear phenomena. J. Light. Technol. 1994, 12, 1230–1238. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, L.; Wang, Y.; Liang, C.; Fan, J.; Su, X.; Huang, M. A Novel Distributed Optical Fiber Temperature Sensor Based on Raman anti-Stokes Scattering Light. Appl. Sci. 2023, 13, 11214. https://doi.org/10.3390/app132011214
Lu L, Wang Y, Liang C, Fan J, Su X, Huang M. A Novel Distributed Optical Fiber Temperature Sensor Based on Raman anti-Stokes Scattering Light. Applied Sciences. 2023; 13(20):11214. https://doi.org/10.3390/app132011214
Chicago/Turabian StyleLu, Lidong, Yishan Wang, Ce Liang, Jiaming Fan, Xingchen Su, and Minnan Huang. 2023. "A Novel Distributed Optical Fiber Temperature Sensor Based on Raman anti-Stokes Scattering Light" Applied Sciences 13, no. 20: 11214. https://doi.org/10.3390/app132011214
APA StyleLu, L., Wang, Y., Liang, C., Fan, J., Su, X., & Huang, M. (2023). A Novel Distributed Optical Fiber Temperature Sensor Based on Raman anti-Stokes Scattering Light. Applied Sciences, 13(20), 11214. https://doi.org/10.3390/app132011214