

Numerical Gas–Liquid Two-Phase Flow Regime Identification in a Horizontal Pipe Using Dynamic Pressure Data


Abstract
1. Introduction
2. Methodology
2.1. Governing Equations
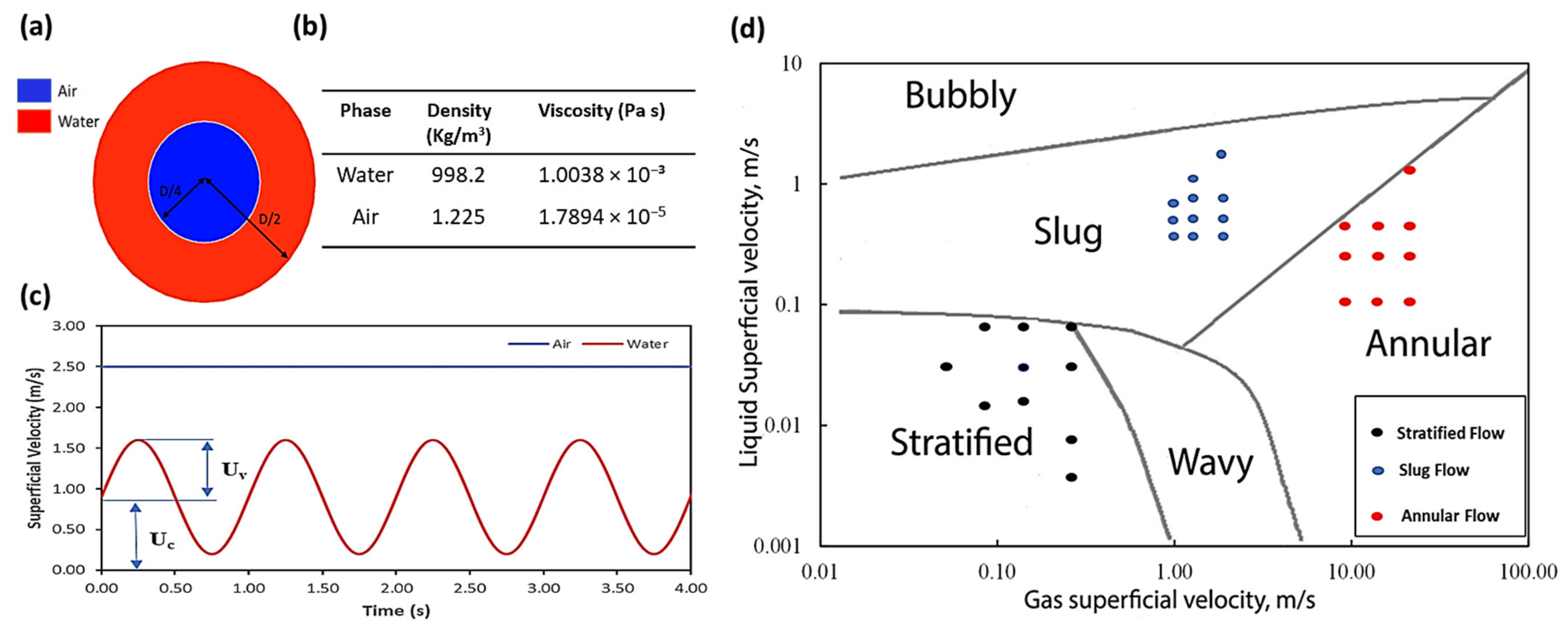
2.2. Geometry
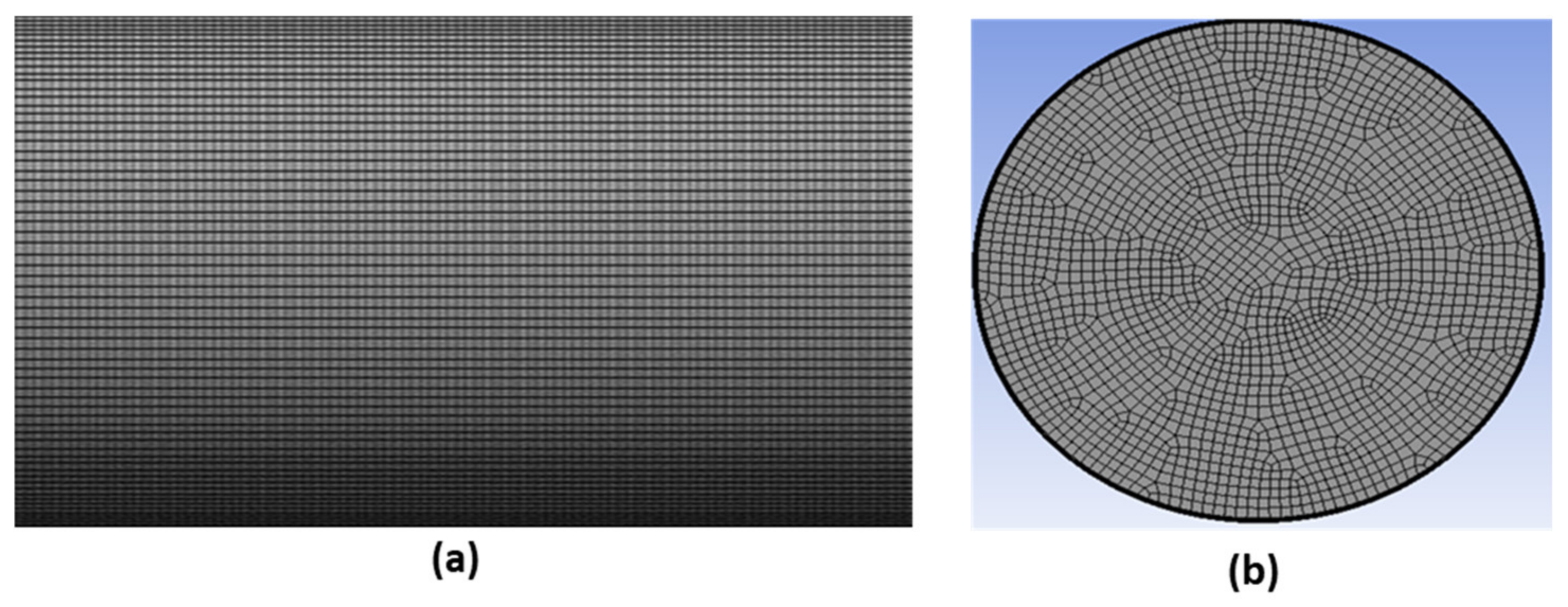
2.3. Meshing and Mesh Quality Analysis
2.4. Grid Convergence Study
2.5. Boundry Conditions
2.6. Simulation Model Settings
3. Validation Examples
3.1. Example 1
3.2. Example 2
4. Results and Discussion
4.1. Flow Regime Identification
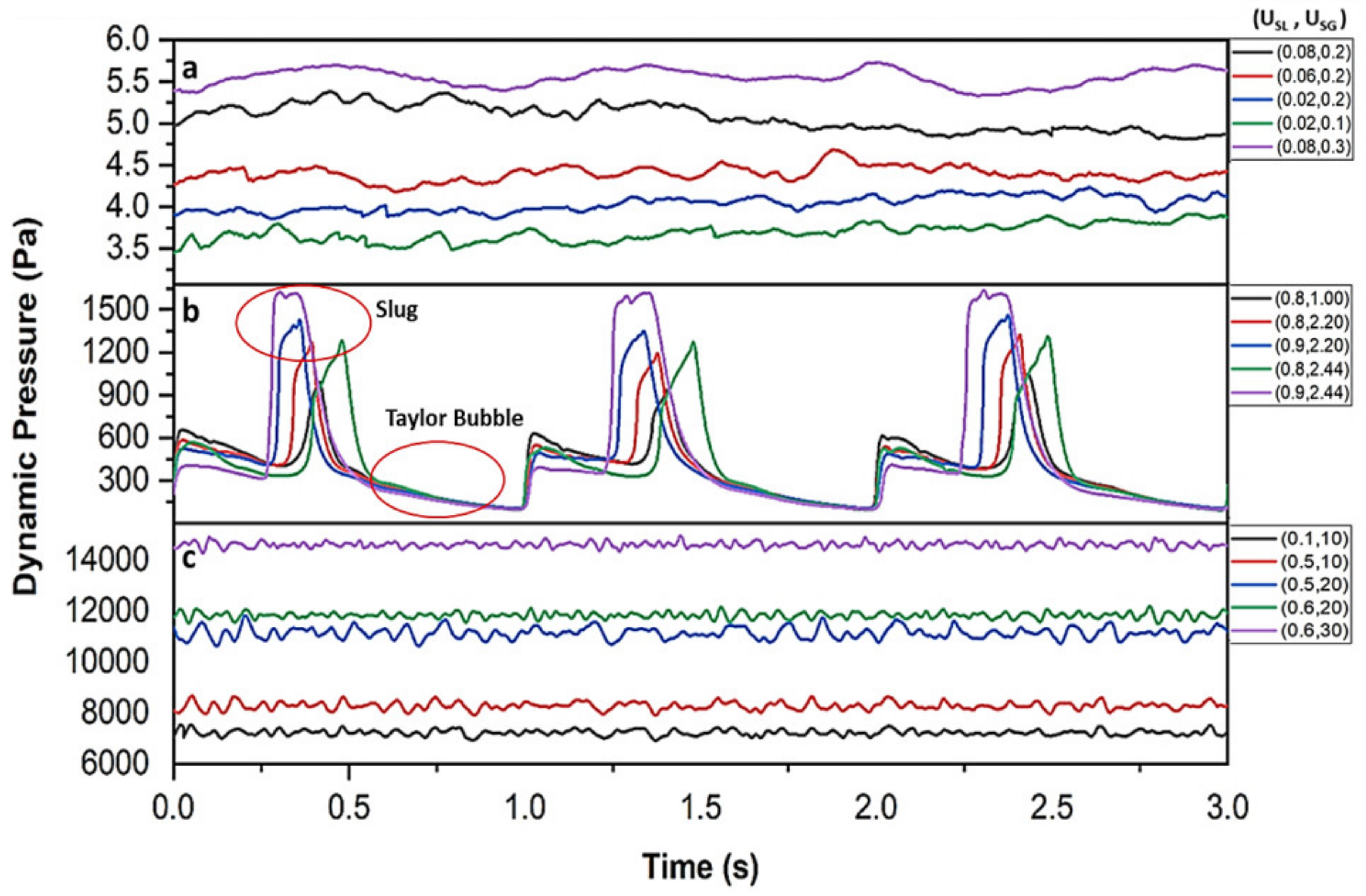
4.1.1. Pressure Fluctuations
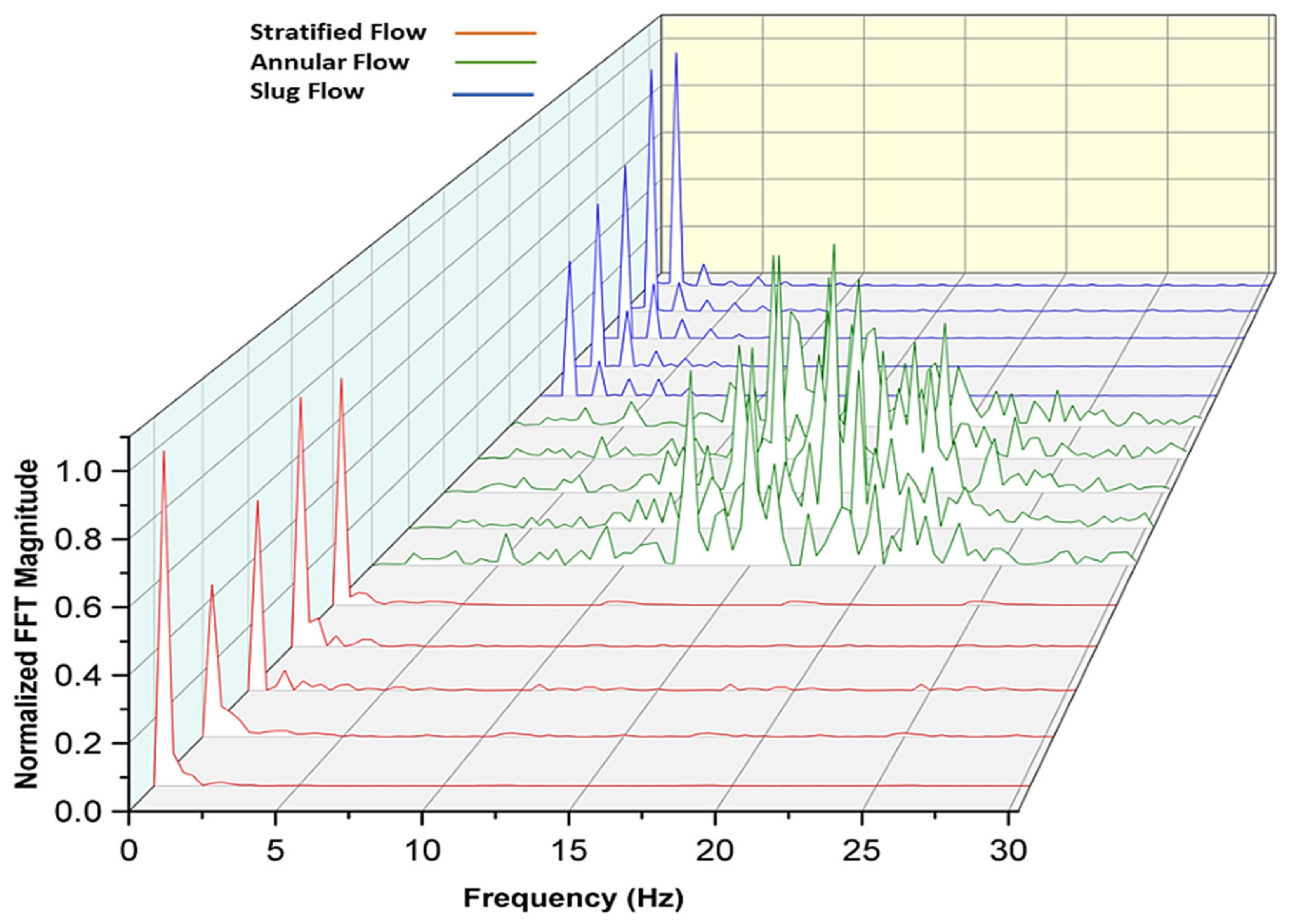
4.1.2. Fast Fourier Transformation
4.1.3. Probability Density Function
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| D | Diameter (m) |
| F | External Body Force |
| g | Gravitational acceleration (m/s2) |
| K | Turbulent Kinetic Energy (J/kg) |
| p | Pressure (Pa) |
| t | Time (s) |
| U | Fluid Velocity (m/s) |
| Uc | Constant velocity (m/s) |
| UM | Mixture Velocity (m/s) |
| Uv | Variable Velocity (m/s) |
| USG | Gas Superficial Velocity (m/s) |
| USL | Liquid Superficial Velocity (m/s) |
| ΔpT | Slope of Total and Inlet Pressure Drop |
| αG | Volume fraction of gas |
| αL | Volume Fraction of Liquid |
| 𝛾 | Pressure Amplitude (Pa) |
| 𝛿 | Pressure Drop Variance |
| є | Rate of Dissipation |
| η | Expansion Parameter |
| λ | Pressure Amplitude/Average Pressure |
| μ | Fluid viscosity (Pa s) |
| ρ | Density (kg/m3) |
| σk,σє | Turbulent Prandtl numbers |
| Gas phase density (kg/m3) | |
| Subscripts | |
| G | Gas Phase |
| L | Liquid Phase |
| M | Liquid-Gas Mixture |
| SG | Superficial Gas |
| SL | Superficial Liquid |
References
- Triplett, K.A.; Ghiaasiaan, S.M.; Abdel-Khalik, S.I.; Sadowski, D.L. Gas–Liquid Two-Phase Flow in Microchannels Part I: Two-Phase Flow Patterns. Int. J. Multiph. Flow 1999, 25, 377–394. [Google Scholar] [CrossRef]
- Brauner, N. Liquid-Liquid Two-Phase Flow Systems. In Modelling and Experimentation in Two-Phase Flow 2003; Springer: Vienna, Austria, 2003; pp. 221–279. [Google Scholar] [CrossRef]
- Wang, W.; Li, J. Simulation of Gas–Solid Two-Phase Flow by a Multi-Scale CFD Approach—Of the EMMS Model to the Sub-Grid Level. Chem. Eng. Sci. 2007, 62, 208–231. [Google Scholar] [CrossRef]
- Peker, S.M.; Helvaci, S.S. Solid-Liquid Two Phase Flow, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2008; pp. 71–166. [Google Scholar]
- Brill, J.P.; Arirachakaran, S.J. State of the Art in Multiphase Flow. J. Pet. Technol. 1992, 44, 538–541. [Google Scholar] [CrossRef]
- Asemi, H.; Daneshgar, S.; Zahedi, R. Experimental Investigation of Gamma Stirling Refrigerator to Convert Thermal to Cooling Energy Utilizing Different Gases. Resour. Environ. Inf. Eng. 2022, 4, 200–212. [Google Scholar] [CrossRef]
- Khan, U.; Pao, W.; Sallih, N. A Review: Factors Affecting Internal Two-Phase Flow-Induced Vibrations. Appl. Sci. 2022, 12, 8406. [Google Scholar] [CrossRef]
- Zahedi, R.; Babaee Rad, A. Numerical and Experimental Simulation of Gas-Liquid Two-Phase Flow in 90-Degree Elbow. Alex. Eng. J. 2022, 61, 2536–2550. [Google Scholar] [CrossRef]
- Kaichiro, M.; Ishii, M. Flow Regime Transition Criteria for Upward Two-Phase Flow in Vertical Tubes. Int. J. Heat Mass Transf. 1984, 27, 723–737. [Google Scholar] [CrossRef]
- Taitel, Y.; Barnea, D.; Dukler, A.E. Modelling Flow Pattern Transitions for Steady Upward Gas-Liquid Flow in Vertical Tubes. AIChE J. 1980, 26, 345–354. [Google Scholar] [CrossRef]
- Jones, O.C.; Zuber, N. The Interrelation between Void Fraction Fluctuations and Flow Patterns in Two-Phase Flow. Int. J. Multiph. Flow 1975, 2, 273–306. [Google Scholar] [CrossRef]
- Merilo, M.; Dechene, R.L.; Cichowlas, W.M. Void Fraction Measurement With a Rotating Electric Field Conductance Gauge. J. Heat Transf. 1977, 99, 330–332. [Google Scholar] [CrossRef]
- Wang, H.X.; Zhang, L.F. Identification of Two-Phase Flow Regimes Based on Support Vector Machine and Electrical Capacitance Tomography. Meas. Sci. Technol. 2009, 20, 114007. [Google Scholar] [CrossRef]
- Juliá, J.E.; Liu, Y.; Paranjape, S.; Ishii, M. Upward Vertical Two-Phase Flow Local Flow Regime Identification Using Neural Network Techniques. Nucl. Eng. Des. 2008, 238, 156–169. [Google Scholar] [CrossRef]
- Kreitzer, P.J.; Hanchak, M.; Byrd, L. Horizontal Two Phase Flow Regime Identification: Comparison Of Pressure Signature, Electrical Capacitance Tomography (ECT) and High Speed Visualization. ASME Int. Mech. Eng. Congr. Expo. Proc. 2012, 7, 1281–1291. [Google Scholar] [CrossRef]
- Matsui, G. Identification of Flow Regimes in Vertical Gas-Liquid Two-Phase Flow Using Differential Pressure Fluctuations. Int. J. Multiph. Flow 1984, 10, 711–719. [Google Scholar] [CrossRef]
- Elperin, T.; Klochko, M. Flow Regime Identification in a Two-Phase Flow Using Wavelet Transform. Exp. Fluids 2002, 32, 674–682. [Google Scholar] [CrossRef]
- Vieira, S.C.; Van der Geest, C.; Fabro, A.T.; De Castro, M.S.; Bannwart, A.C. Intermittent Slug Flow Identification and Characterization from Pressure Signature. Mech. Syst. Signal Process. 2021, 148, 107148. [Google Scholar] [CrossRef]
- Morshed, M.; Khan, M.S.; Rahman, M.A.; Imtiaz, S. Flow Regime, Slug Frequency and Wavelet Analysis of Air/Newtonian and Air/Non-Newtonian Two-Phase Flow. Appl. Sci. 2020, 10, 3272. [Google Scholar] [CrossRef]
- Mendes, F.A.A. Estudo Experimental, Simulação Numérica e Modelagem Fenomenológica Da Separação Gravitacional de Gás No Fundo de Poços Direcionais. Ph.D. Thesis, University of São Paulo, São Carlos, Brazil, 2013. [Google Scholar]
- Wambsganss, M.W.; Jendrzejczyk, J.A.; France, D.M. Two-Phase Flow Patterns and Transitions in a Small, Horizontal, Rectangular Channel. Int. J. Multiph. Flow 1991, 17, 327–342. [Google Scholar] [CrossRef]
- Cai, Y.; Wambsganss, M.W.; Jendrzejczyk, J.A. Application of Chaos Theory in Identification of Two-Phase Flow Patterns and Transitions in a Small, Horizontal, Rectangular Channel. J. Fluids Eng. Trans. ASME 1996, 118, 383–390. [Google Scholar] [CrossRef]
- Sun, B.; Zhang, H.; Cheng, L.; Zhao, Y. Flow Regime Identification of Gas-Liquid Two-Phase Flow Based on HHT. Chin. J. Chem. Eng. 2006, 14, 24–30. [Google Scholar] [CrossRef]
- Matsui, G. Automatic Identification of Flow Regimes in Vertical Two-Phase Flow Using Differential Pressure Fluctuations. Nucl. Eng. Des. 1986, 95, 221–231. [Google Scholar] [CrossRef]
- Hanafizadeh, P.; Eshraghi, J.; Taklifi, A. Experimental Identification of Flow Regimes in Gas—Liquid Two Phase Flow in a Vertical Pipe. Meccanica 2015, 51, 1771–1782. [Google Scholar] [CrossRef]
- Shaban, H.; Tavoularis, S. Identification of Flow Regime in Vertical Upward Air-Water Pipe Flow Using Differential Pressure Signals and Elastic Maps. Int. J. Multiph. Flow 2014, 61, 62–72. [Google Scholar] [CrossRef]
- Lockhart, R.W.; Martinelli, R.C. Proposed Correlation of Data for Isothermal Two-Phase Two Component Flow in Pipes. Chem. Eng. Prog. 1949, 45, 39–48. [Google Scholar]
- Khan, U.; Pao, W.; Sallih, N.; Hassan, F. Flow Regime Identification in Gas-Liquid Two-Phase Flow in Horizontal Pipe by Deep Learning. J. Adv. Res. Appl. Sci. Eng. Technol. 2022, 27, 86–91. [Google Scholar] [CrossRef]
- Khan, U.; Pao, W.; Sallih, N.; Hassan, F. Identification of Horizontal Gas-Liquid Two-Phase Flow Regime Using Deep Learning. CFD Lett. 2022, 14, 68–78. [Google Scholar] [CrossRef]
- Nichita, B.A.; Zun, I. A Volume of Fluid Method for Modeling of Gas-Liquid Interface. J. Fluids Eng. 2015, 132, 081302. [Google Scholar] [CrossRef]
- ANSYS FLUENT 13 Ansys Fluent Theory Guide; ANSYS Inc.: Canonsburg, PA, USA, 2013; Volume 15317, pp. 724–746.
- Ban, S.; Pao, W.; Nasif, M.S. Numerical Simulation of Two-Phase Flow Regime in Horizontal Pipeline and Its Validation. Int. J. Numer. Methods Heat Fluid Flow 2018, 28, 1279–1314. [Google Scholar] [CrossRef]
- Mohmmed, A.O.; Nasif, M.S.; Al-Kayiem, H.H.; Time, R.W. Measurements of Translational Slug Velocity and Slug Length Using an Image Processing Technique. Flow Meas. Instrum. 2016, 50, 112–120. [Google Scholar] [CrossRef]
- Taitel, Y.; Dukler, A.E. A Model for Predicting Flow Regime Transitions in Horizontal and near Horizontal Gas-liquid Flow. AIChE J. 1976, 22, 47–55. [Google Scholar] [CrossRef]
- Gregory, G.A.; Scott, D.S. Correlation of Liquid Slug Velocity and Frequency in Horizontal Cocurrent Gas-liquid Slug Flow. AIChE J. 1969, 15, 933–935. [Google Scholar] [CrossRef]
- Heywood, N.I.; Richardson, J.F. Slug Flow of Air-Water Mixtures in a Horizontal Pipe: Determination of Liquid Holdup by γ-Ray Absorption. Chem. Eng. Sci. 1979, 34, 17–30. [Google Scholar] [CrossRef]
- Greskovich, E.J.; Shrier, A.L. Slug Frequency in Horizontal Gas-Liquid Slug Flow. Ind. Eng. Chem. Process Des. Dev. 1972, 11, 317–318. [Google Scholar] [CrossRef]
- Mohmmed, A. Effect of Slug Two-Phase Flow on Fatigue of Pipe. PhD Thesis, Universiti Teknologi Petronas, Seri Iskandar, Malaysia, 2016. [Google Scholar]
- Al-Tameemi, W.T.M.; Ricco, P. Pattern-Based Pressure Drop of Air–Water Flow across a 90° Sharp Mitre Elbow. Int. J. Comput. Methods Exp. Meas. 2018, 6, 198–207. [Google Scholar] [CrossRef]
- Baker, O. Design of Pipelines for the Simultaneous Flow of Oil and Gas. In Proceedings of the Fall Meeting of the Petroleum Branch of AIME, Dallas, TX, USA, 19–21 October 1953. [Google Scholar] [CrossRef]
- Vaze, M.J.; Banerjee, J. Experimental Visualization of Two-Phase Flow Patterns and Transition from Stratified to Slug Flow. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 382–389. [Google Scholar] [CrossRef]
- Chen, L.; Tian, Y.S.; Karayiannis, T.G. The Effect of Tube Diameter on Vertical Two-Phase Flow Regimes in Small Tubes. Int. J. Heat Mass Transf. 2006, 49, 4220–4230. [Google Scholar] [CrossRef]
- Venkatesan, M.; Das, S.K.; Balakrishnan, A.R. Effect of Diameter on Two-Phase Pressure Drop in Narrow Tubes. Exp. Therm. Fluid Sci. 2011, 35, 531–541. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | Elements | Size of Element (m) | Avg. Dynamic Pressure (KPa) |
|---|---|---|---|
| Coarse | 175,664 | 0.008 | 1398 |
| Intermediate | 305,254 | 0.005 | 1321 |
| Fine | 458,143 | 0.004 | 1302 |
| Extrapolated Values | 1297.2 |
| Parameters | Slug Flow | ||
|---|---|---|---|
| Hanafizadeh et al. [25] | Present Study | Percentage Error | |
| 𝛾 (bar) | 0.092 ± 0.01 | 0.091 | 1.08% |
| 𝛌 | 0.724 ± 0.10 | 0.753 | 3.85% |
| −0.056 ± 0.003 | −0.057 | 1.75% | |
| 𝛿 | −0.796 ± 0.15 | −0.656 | 17.50% |
| References | Slug Frequency (Hz) | % Error |
|---|---|---|
| Present model | 0.968 | - |
| [35] | 0.926 | 4.53% |
| [36] | 1.021 | 5.47% |
| [37] | 0.930 | 3.92% |
| Flow Regime | Dominant Frequency FFT (Hz) | FFT Amplitude (Pa) | PDF Maximum | Location of Maximum PDF |
|---|---|---|---|---|
| Stratified | 0.33 | 70–97 | 24–38 | 0.26 ± 0.02 |
| Slug | 1 | 100–175 | 1.3–1.7 | 0.25 ± 0.04 |
| Annular | 12.5–17 | 2.2–3.5 | 19–26 | 0.95 ± 0.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, U.; Pao, W.; Sallih, N. Numerical Gas–Liquid Two-Phase Flow Regime Identification in a Horizontal Pipe Using Dynamic Pressure Data. Appl. Sci. 2023, 13, 1225. https://doi.org/10.3390/app13021225
Khan U, Pao W, Sallih N. Numerical Gas–Liquid Two-Phase Flow Regime Identification in a Horizontal Pipe Using Dynamic Pressure Data. Applied Sciences. 2023; 13(2):1225. https://doi.org/10.3390/app13021225
Chicago/Turabian StyleKhan, Umair, William Pao, and Nabihah Sallih. 2023. "Numerical Gas–Liquid Two-Phase Flow Regime Identification in a Horizontal Pipe Using Dynamic Pressure Data" Applied Sciences 13, no. 2: 1225. https://doi.org/10.3390/app13021225
APA StyleKhan, U., Pao, W., & Sallih, N. (2023). Numerical Gas–Liquid Two-Phase Flow Regime Identification in a Horizontal Pipe Using Dynamic Pressure Data. Applied Sciences, 13(2), 1225. https://doi.org/10.3390/app13021225