




Dynamic Response Analysis of JPCP with Different Roughness Levels under Moving Axle Load Using a Numerical Methodology


Abstract
:1. Introduction
2. Assumption
- (1)
- (2)
- (3)
3. Dynamic Load Generation
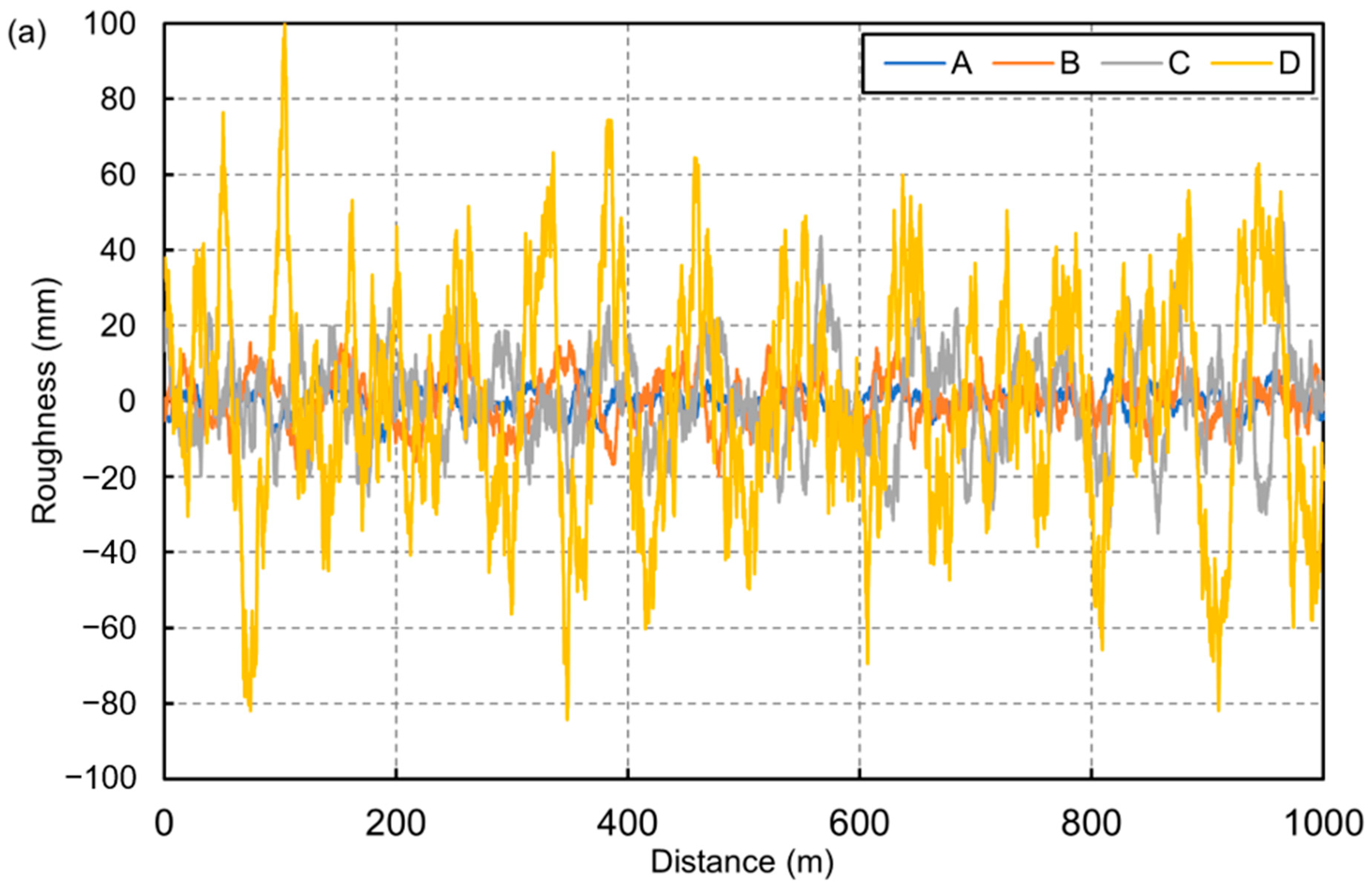
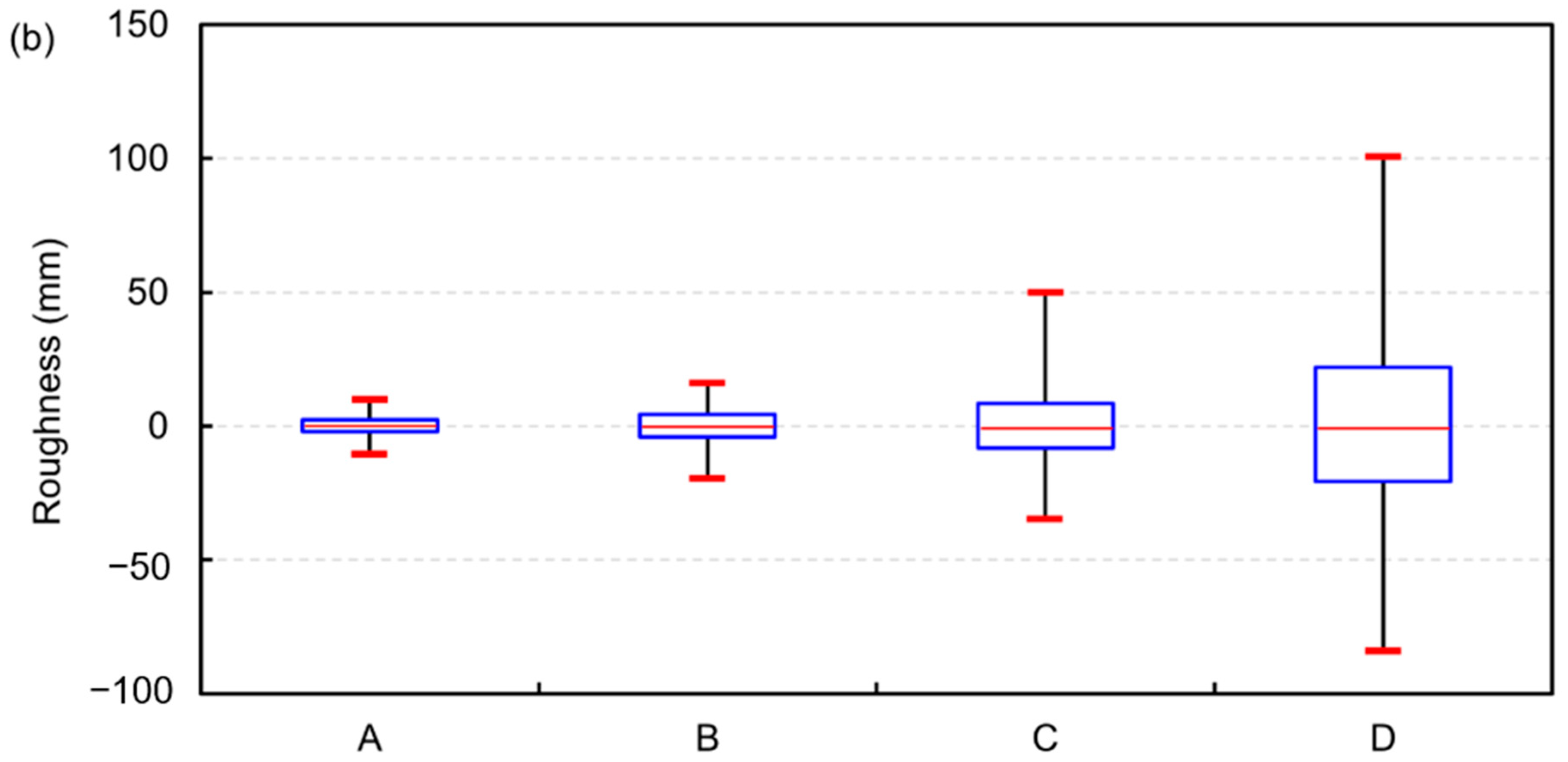
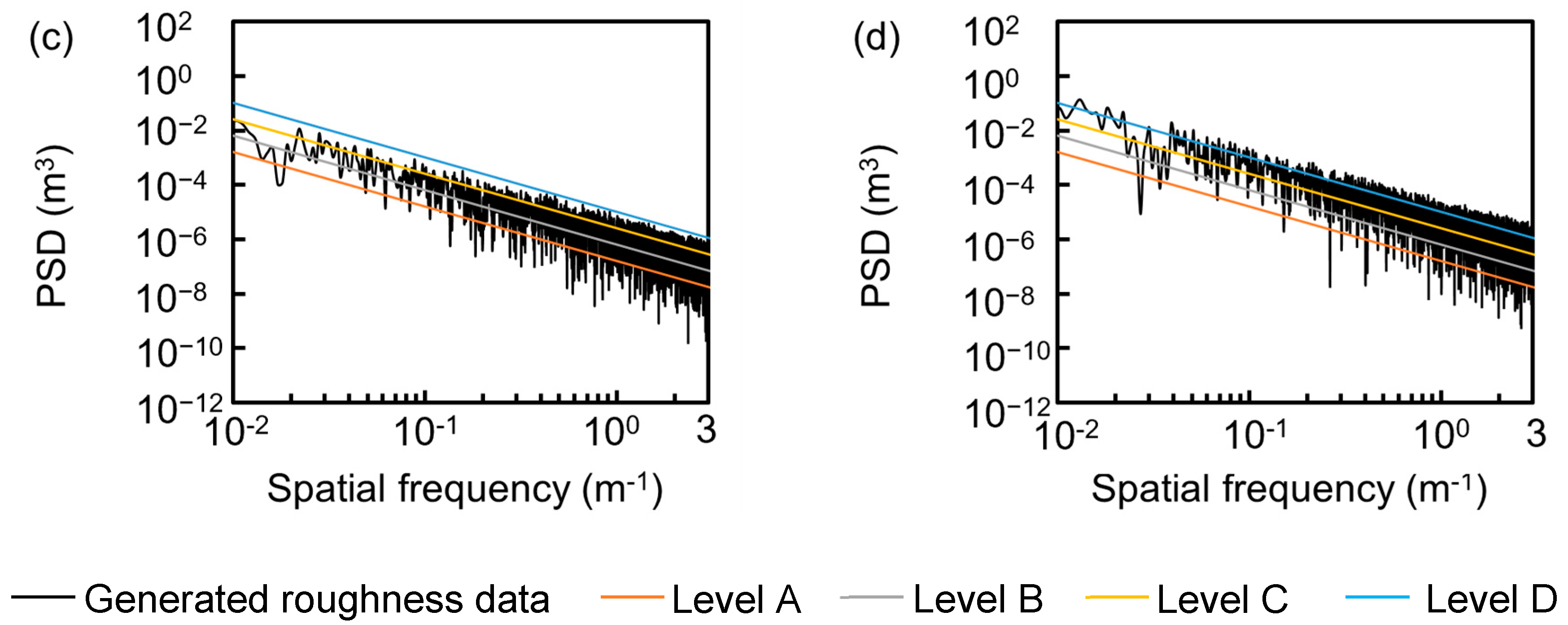
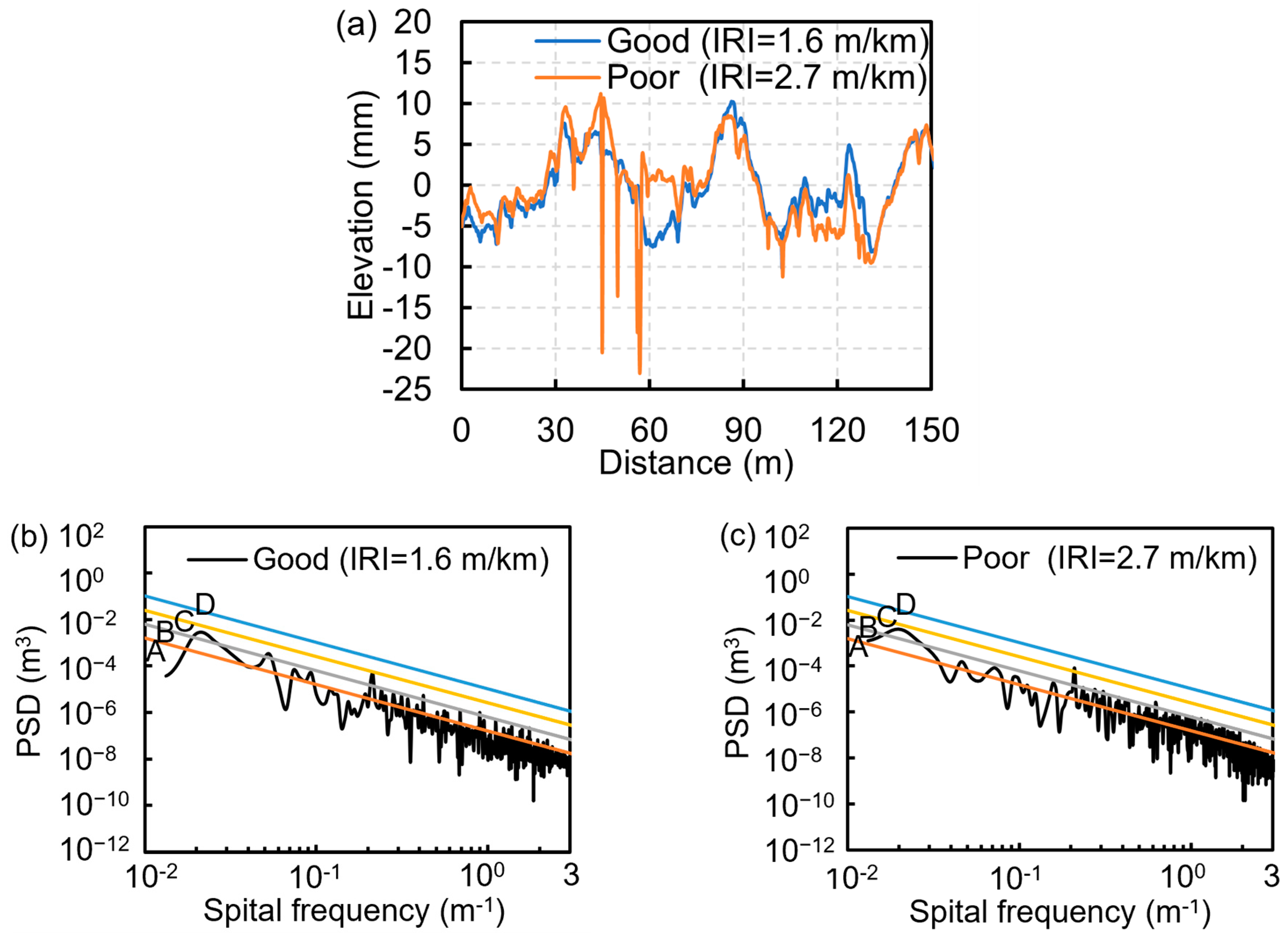
3.1. Pavement Roughness Generation
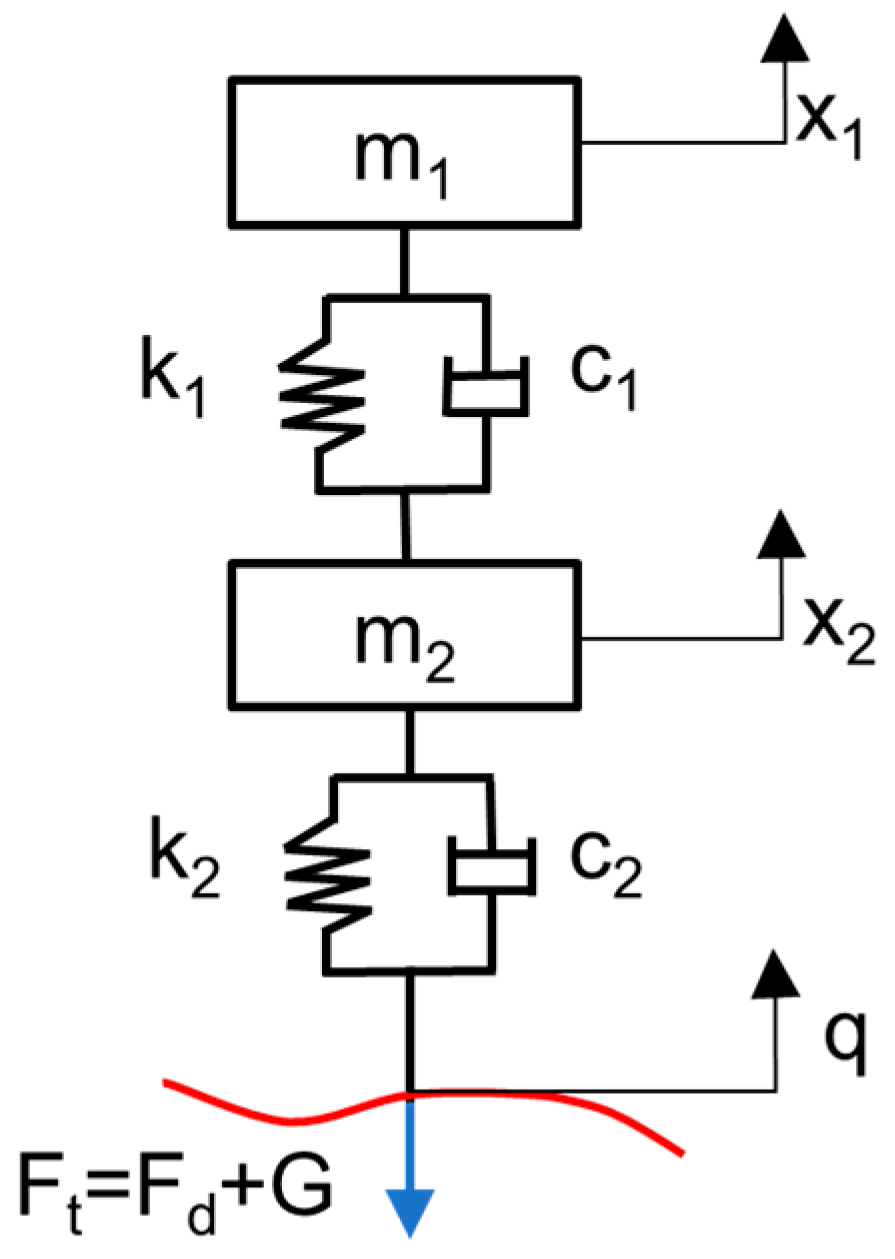
3.2. Dynamic Load Generation
4. Numerically Simulated Dynamic Response of JPCP
4.1. Structure Model
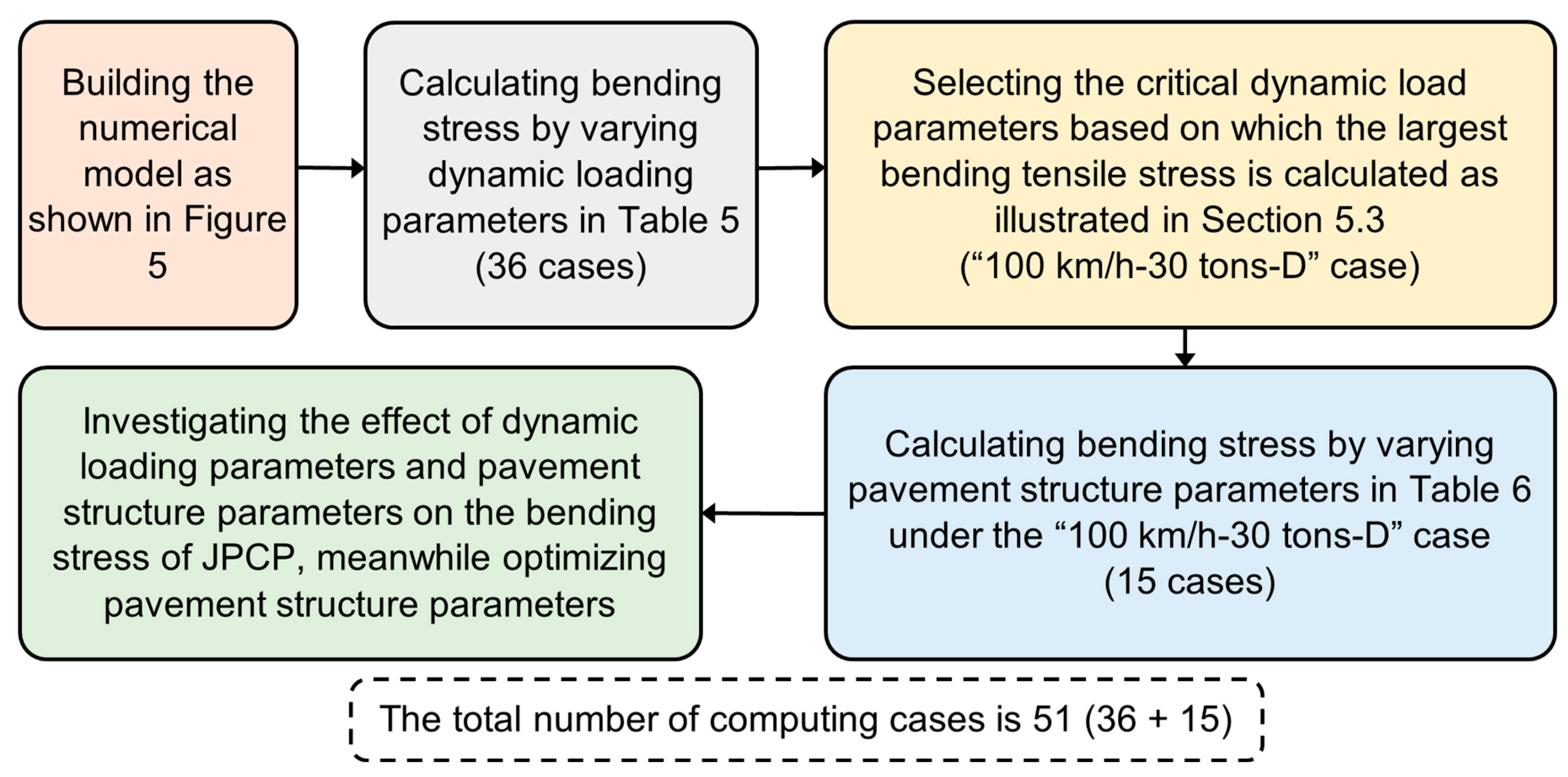
4.2. Computing Procedure
4.3. Axle Load
5. Result and Analysis
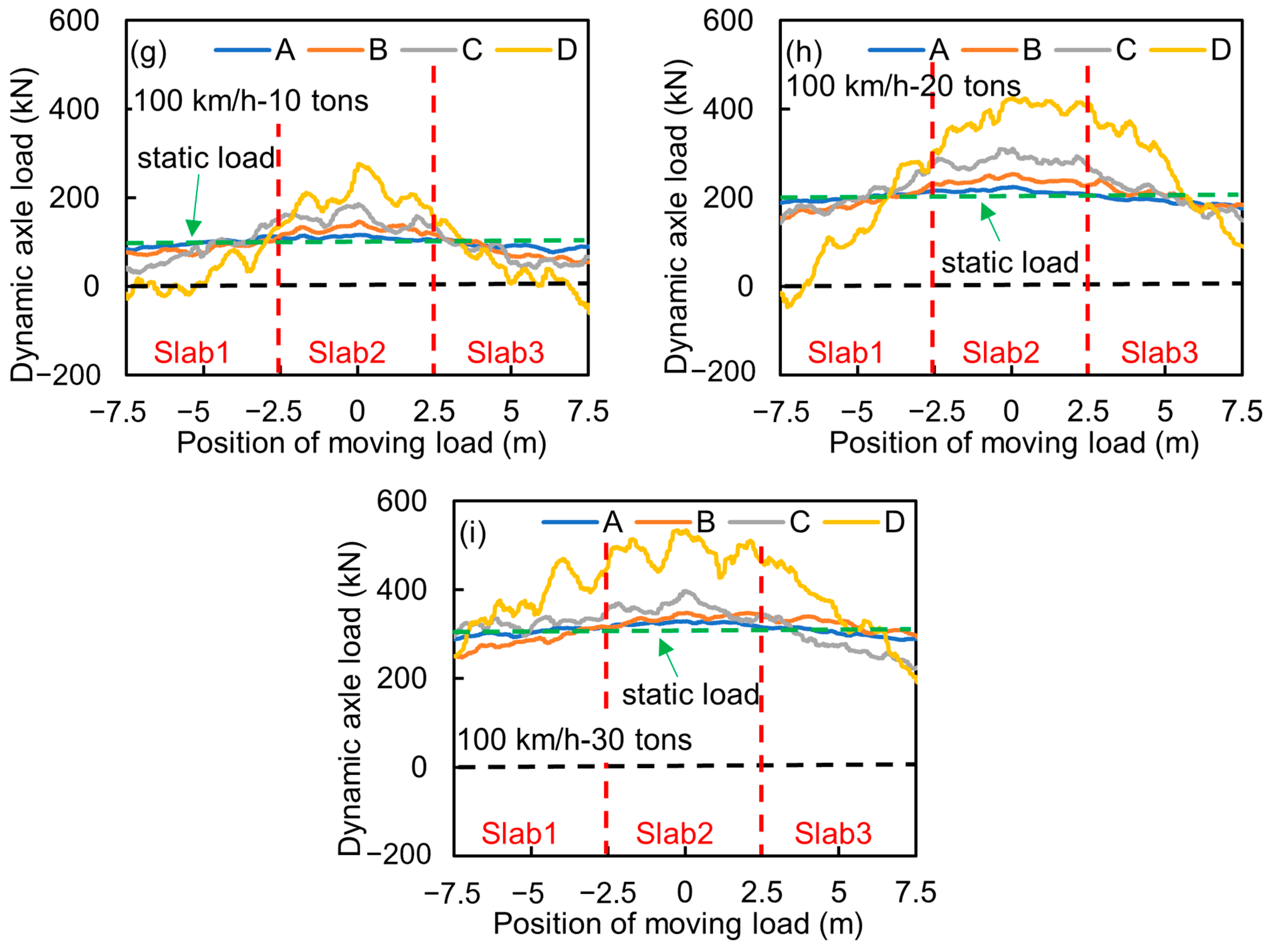
5.1. Generated Dynamic Load along the Traveling Direction
5.2. Recognizing Critical Locations with Large Tensile Stress in JPCP under Dynamic Load
5.3. Effect of Dynamic Loading Parameters
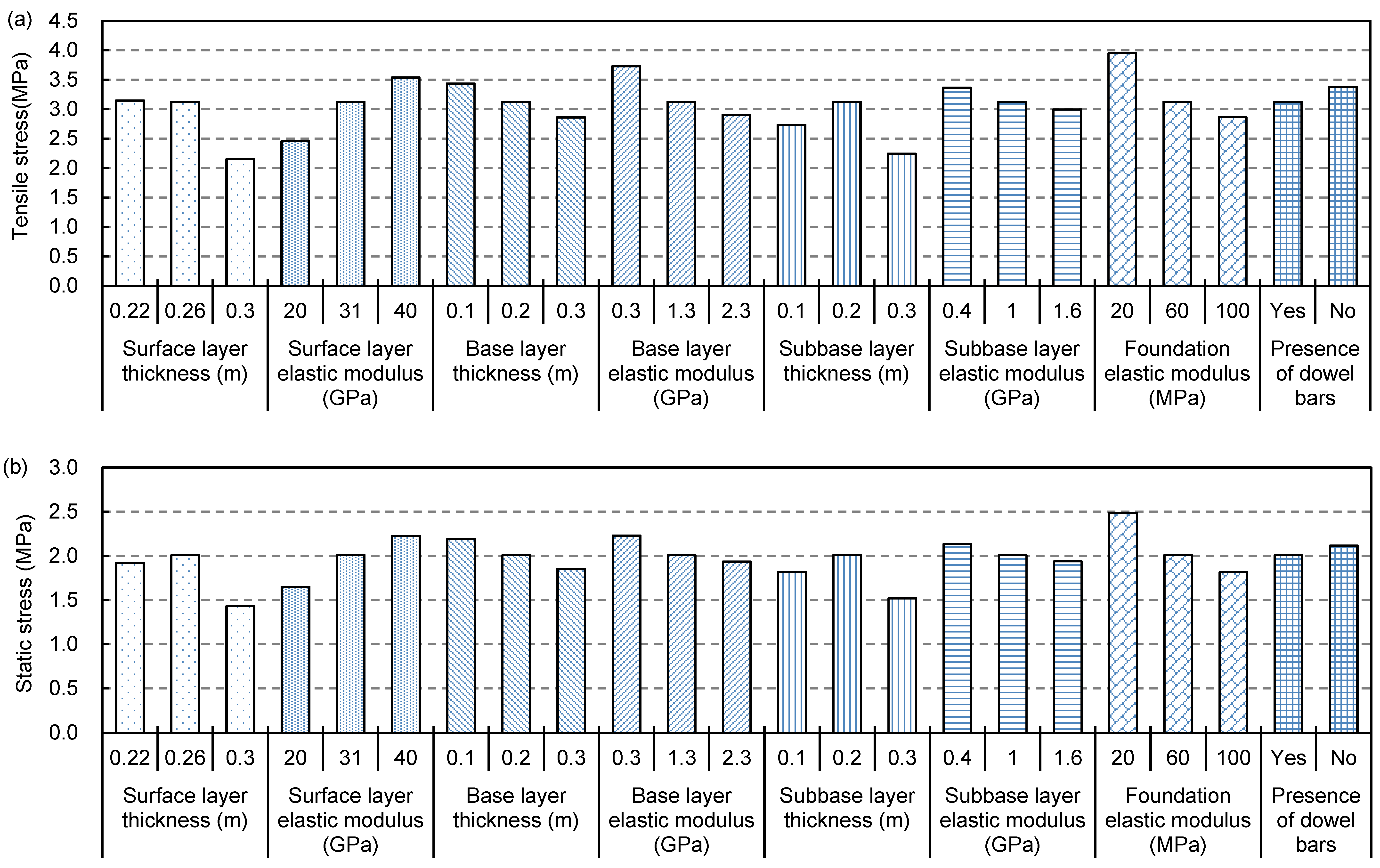
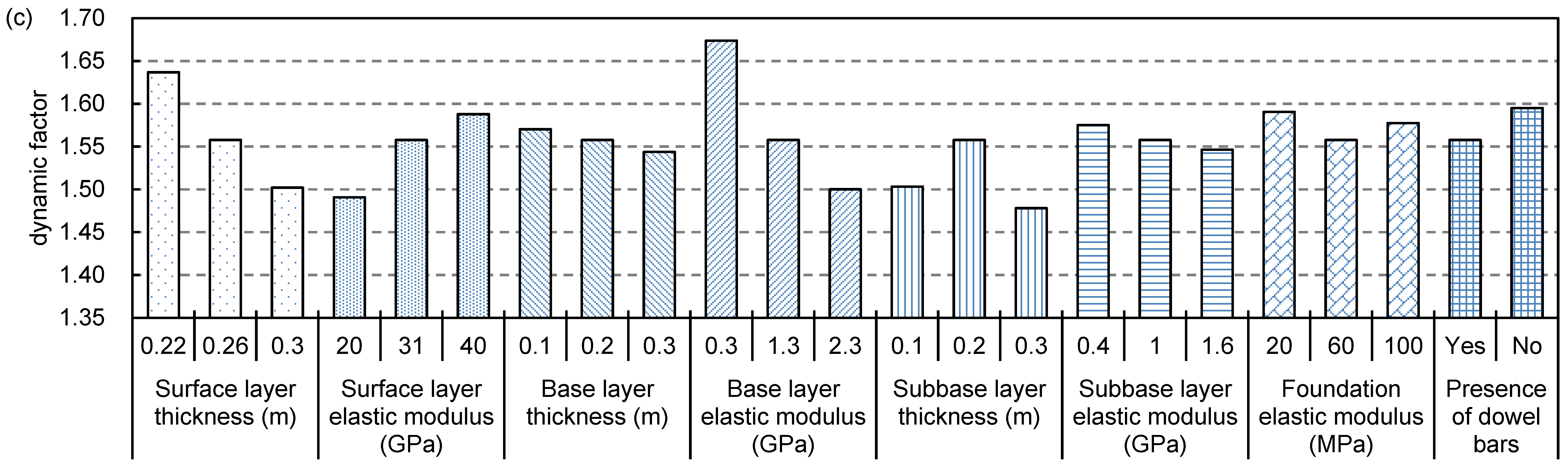
5.4. Effect of Pavement Structure Parameters
5.5. Optimization of Pavement Structure Parameters
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wei, Y.; Liang, S.; Gao, X. Numerical Evaluation of Moisture Warping and Stress in Concrete Pavement Slabs with Different Water-to-Cement Ratio and Thickness. J. Eng. Mech. 2017, 143, 04016111. [Google Scholar] [CrossRef]
- Sok, T.; Kim, Y.K.; Lee, S.W. Numerical evaluation of built-in temperature distribution effects on stress development in concrete pavements. Road Mater. Pavement Des. 2021, 22, 871–893. [Google Scholar] [CrossRef]
- JTG D40-2011; Specifications for Design of Highway Cement Concrete Pavement. Ministry of Transport of the People’s Republic of China: Beijing, China, 2011.
- Packard, R.G. Thickness Design for Concrete Highway and Street Pavements; Portland Cement Association: Skokie, IL, USA, 1984. [Google Scholar]
- Deng, X.; Sun, L. Research on Dynamic of Vehicle-Road Coupled System; People’s Communications Press: Beijing, China, 2000. [Google Scholar]
- Cebon, D. Handbook of Vehicle-Road Interaction: Vehicle Dynamics, Suspension Design, and Road Damage; Swets & Zeitlinger B.V.: Leiden, The Netherlands, 1999. [Google Scholar]
- Chatti, K.; Lysmer, J.; Monismith, C.L. Dynamic finite-element analysis of jointed concrete pavements. Transp. Res. Rec. 1994, 79–90. Available online: https://escholarship.org/uc/item/8t3513wr (accessed on 29 September 2023).
- Bhatti, M.A.; Stoner, J.W. Nonlinear Pavement Distress Model Using Dynamic Vehicle Loads. J. Infrastruct. Syst. 1998, 4, 71–78. [Google Scholar] [CrossRef]
- Kim, S.-M.; Won, M.C.; Frank McCullough, B. Dynamic Stress Response of Concrete Pavements to Moving Tandem-Axle Loads. Transp. Res. Rec. 2002, 1809, 32–41. [Google Scholar] [CrossRef]
- Darestani, M.Y.; Thambiratnam, D.P.; Nataatmadja, A.; Baweja, D. Structural Response of Concrete Pavements under Moving Truck Loads. J. Transp. Eng. 2007, 133, 670–676. [Google Scholar] [CrossRef]
- Kuo, C.M.; Fu, C.R.; Chen, K.Y. Effects of Pavement Roughness on Rigid Pavement Stress. J. Mech. 2011, 27, 1–8. [Google Scholar] [CrossRef]
- Huang, Y.H. Pavement Analysis and Design; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Sun, L.; Deng, X. Predicting Vertical Dynamic Loads Caused by Vehicle-Pavement Interaction. J. Transp. Eng. 1998, 124, 470–478. [Google Scholar] [CrossRef]
- Liu, C.; Wu, D.; Li, Y.; Du, Y. Large-scale pavement roughness measurements with vehicle crowdsourced data using semi-supervised learning. Transp. Res. Part C Emerg. Technol. 2021, 125, 103048. [Google Scholar] [CrossRef]
- Ye, Z.; Lu, Y.; Wang, L. Investigating the Pavement Vibration Response for Roadway Service Condition Evaluation. Adv. Civ. Eng. 2018, 2018, 2714657. [Google Scholar] [CrossRef]
- Wang, H.; Al-Qadi, I.L.; Stanciulescu, I. Effect of Surface Friction on Tire-Pavement Contact Stresses during Vehicle Maneuvering. J. Eng. Mech. 2014, 140, 04014001. [Google Scholar] [CrossRef]
- Liu, P.; Ravee, V.; Wang, D.; Oeser, M. Study of the influence of pavement unevenness on the mechanical response of asphalt pavement by means of the finite element method. J. Traffic Transp. Eng. (Engl. Ed.) 2018, 5, 169–180. [Google Scholar] [CrossRef]
- Liu, C.; Herman, R. Road Profile, Vehicle Dynamics, and Ride Quality Rating. J. Transp. Eng. 1999, 125, 123–128. [Google Scholar] [CrossRef]
- Hu, G.; Li, P.; Xia, H.; Xie, T.; Mu, Y.; Guo, R. Study of the Dynamic Response of a Rigid Runway with Different Void States during Aircraft Taxiing. Appl. Sci. 2022, 12, 7465. [Google Scholar] [CrossRef]
- ISO 8608; Mechanical Vibration-Road Surface Profiles-Reporting of Measured Data. International Organization for Standardization: Geneva, Switzerland, 2016.
- Liu, C.; Wang, Z. Influence of Joints on Ride Quality and Roughness Index. Road Mater. Pavement Des. 2008, 9, 111–121. [Google Scholar] [CrossRef]
- Wu, Q.; Chen, B.; Xi, L. Comparison of PSD method and IRl method for road roughness evaluation. J. Traffic Transp. Ation Enqineering 2008, 8, 36–41. [Google Scholar]
- Long Term Pavement Performance InfoPave. SDR 37-August. 2023. Available online: https://infopave.fhwa.dot.gov (accessed on 31 August 2023).
- Lu, Z.; Hu, Z.; Yao, H.; Liu, J.; Zhan, Y. An analytical method for evaluating highway embankment responses with consideration of dynamic wheel–pavement interactions. Soil Dyn. Earthq. Eng. 2016, 83, 135–147. [Google Scholar] [CrossRef]
- Paultre, P. Dynamics of Structures; ISTE Ltd.: Edinburgh, UK; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013. [Google Scholar]
- Shoukry, S.N.; Fahmy, M.; Prucz, J.; William, G. Validation of 3DFE Analysis of Rigid Pavement Dynamic Response to Moving Traffic and Nonlinear Temperature Gradient Effects. Int. J. Geomech. 2007, 7, 16–24. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, W.; Mei, J.; Yue, G.; Yang, L. Optimization of Structure Parameters of Airfield Jointed Concrete Pavements under Temperature Gradient and Aircraft Loads. Adv. Mater. Sci. Eng. 2019, 2019, 3251590. [Google Scholar] [CrossRef]
- Múčka, P. Simulated Road Profiles According to ISO 8608 in Vibration Analysis. J. Test. Eval. 2018, 46, 405–418. [Google Scholar] [CrossRef]
- Zdiri, M.; Abriak, N.-E.; Ben Ouezdou, M.; Loulizi, A.; Neji, J. Numerical modeling of a roller compacted concrete pavement under vehicular loading. Int. J. Pavement Res. Technol. 2009, 2, 188–195. [Google Scholar]
- Su, S. Dynamic Characteristic Analysis of Vehicle-Road Coupled System Considering the Factor of Pavement Evenness. Master’s Thesis, Chongqing Jiaotong University, Chongqing, China, 2008. [Google Scholar]
- Liu, X.; Zhang, X. Finite Element Modeling and Parametric Analysis of Pavement Dynamic Responses under Moving Vehicle Load. Trans. Nanjing Univ. Aeronaut. Astronaut. 2020, 37, 490–500. [Google Scholar] [CrossRef]
- Wu, G.; Wang, R.; Zheng, J.; Han, C. Research about the infuence of surface’s rouchness on slab’s bottom reaction and fatigue destruction of cement pavement. J. Kunming Univ. Sci. Technol. (Nat. Sci.) 2004, 29, 76–80. [Google Scholar]
- Zhang, J. The Research on the Dynamic Interaction between Heavy Vehicle and Rigid Pavement Structure. Ph.D. Thesis, Hunan University, Changsha, China, 2005. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Gq(n0) (×10−6 m3) | IRI (m/km) Corresponding to the Average Value of Gq(n0) | ||
|---|---|---|---|---|
| Lower Limit | Geometric Value | Upper Limit | ||
| A | 0 | 16 | 32 | 2.4 |
| B | 32 | 64 | 128 | 4.8 |
| C | 128 | 256 | 512 | 9.6 |
| D | 512 | 1024 | 2048 | 19.2 |
| Pavement Level | A | B | C | D |
|---|---|---|---|---|
| Standard deviation (mm) | 3.21 | 6.30 | 12.61 | 29.60 |
| Mean value (mm) | 0.04 | 0.07 | 0.21 | 0.02 |
| Minimum (mm) | −10.91 | −19.78 | −34.94 | −84.22 |
| 25% value (mm) | −2.05 | −4.22 | −8.30 | −20.70 |
| Median value (mm) | 0.28 | 0.14 | 0.04 | −1.17 |
| 75% value (mm) | 2.29 | 4.37 | 8.57 | 21.86 |
| Maximum (mm) | 9.61 | 15.86 | 49.76 | 100.61 |
| Parameters | Value |
|---|---|
| m1 | 4450 kg (axle weight = 10 tons, and first natural frequency = 11.86 Hz) 9450 kg (axle weight = 20 tons, and first natural frequency = 8.17 Hz) 14,450 kg (axle weight = 30 tons, and first natural frequency = 6.62 Hz) |
| m2 | 550 kg |
| k1 | 1 × 106 N/m |
| k2 | 1.75 × 106 N/m |
| c1 | 15 × 103 N·s/m |
| c2 | 2 × 103 N·s/m |
| Geometric Parameters x (m) × y (m) × z (m) | Elastic Modulus | Poisson’s Ratio | Density (kg/m3) | |
|---|---|---|---|---|
| Slab | 5 × 4 × 0.26 | 31 GPa | 0.15 | 2400 |
| Base layer | 16 × 5 × 0.2 | 1.3 GPa | 0.20 | 2300 |
| Subbase layer | 16 × 5 × 0.2 | 1.0 GPa | 0.20 | 2300 |
| Foundation | 16 × 5 × 4 | 60 MPa | 0.35 | 2000 |
| Dowel bar | 30 mm in diameter; 500 mm in length; 300 mm spacing | 206 GPa | 0.30 | 7850 |
| Vehicle Speed (km/h) | Axle Weight (t) | Roughness Level |
|---|---|---|
| 30 60 100 | 10 20 30 | A B C D |
| Slab | Base Layer | Subbase Layer | Foundation | Dowel Bar | |||
|---|---|---|---|---|---|---|---|
| Thickness (m) | Elastic Modulus (GPa) | Thickness (m) | Elastic Modulus (GPa) | Thickness (m) | Elastic Modulus (GPa) | Elastic Modulus (MPa) | Existence |
| 0.22 | 20 | 0.10 | 0.3 | 0.10 | 0.4 | 20 | No Yes |
| 0.26 | 31 | 0.20 | 1.3 | 0.20 | 1.0 | 60 | |
| 0.30 | 40 | 0.30 | 2.3 | 0.30 | 1.6 | 100 | |
| Before Optimization: Structure Parameters Are Shown in Table 4 | Optimization 1: Increasing Thickness of Slab from 0.26 m to 0.3 m | Optimization 2: Increasing Thickness of Base Layer from 0.2 m to 0.3 m | Optimization 3: Increasing Elastic Modulus of Base Layer from 1.3 GPa to 2.3 GPa | Optimization 4: Increasing Thickness of Subbase Layer from 0.2 m to 0.3 m | ||
|---|---|---|---|---|---|---|
| Dynamic tensile stress (MPa) | 20 t | 2.63 | 1.83 (−30.5%) | 2.44 (−7.3%) | 2.46 (−6.6%) | 1.92 (−27.1%) |
| 30 t | 3.05 | 2.10 (−31.1%) | 2.80 (−8.1%) | 2.84 (−6.8%) | 2.21 (−27.4%) | |
| Static Tensile stress (MPa) | 20 t | 1.37 | 0.98 (−28.5%) | 1.27 (−7.3%) | 1.32 (−3.6%) | 1.05 (−23.5%) |
| 30 t | 2.01 | 1.43 (−28.9%) | 1.85 (−8.0%) | 1.94 (−3.5%) | 1.52 (−24.4%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, C.; Wei, Y. Dynamic Response Analysis of JPCP with Different Roughness Levels under Moving Axle Load Using a Numerical Methodology. Appl. Sci. 2023, 13, 11046. https://doi.org/10.3390/app131911046
Yan C, Wei Y. Dynamic Response Analysis of JPCP with Different Roughness Levels under Moving Axle Load Using a Numerical Methodology. Applied Sciences. 2023; 13(19):11046. https://doi.org/10.3390/app131911046
Chicago/Turabian StyleYan, Chuang, and Ya Wei. 2023. "Dynamic Response Analysis of JPCP with Different Roughness Levels under Moving Axle Load Using a Numerical Methodology" Applied Sciences 13, no. 19: 11046. https://doi.org/10.3390/app131911046
APA StyleYan, C., & Wei, Y. (2023). Dynamic Response Analysis of JPCP with Different Roughness Levels under Moving Axle Load Using a Numerical Methodology. Applied Sciences, 13(19), 11046. https://doi.org/10.3390/app131911046