
Research on Multi-Objective Optimization Model of Foundation Pit Dewatering Based on NSGA-II Algorithm


Abstract
:1. Introduction
2. Establishment of Multi-Objective Optimization Model and Evaluation System for Foundation Pit Dewatering
2.1. Establishment of Objective Function, Constraints, and Control Conditions
2.1.1. Establishment of Objective Function of Optimization Model
- (1)
- Minimum total cost of dewatering
- (2)
- The minimum amount of land subsidence caused by dewatering
- (3)
- The maximum drawdown of the water level in the center of the foundation pit
2.1.2. Determination of Constraints in Optimization Model
- (1)
- Groundwater level
- (2)
- Single well pumping capacity
- (3)
- Number of pumping wells
- (4)
- Settlement
2.1.3. Determination of Optimal Model Control Conditions
- (1)
- Well radius
- (2)
- Hydraulic gradient
2.2. Establishment of Multi-Objective Optimization Evaluation System
3. Solution of Multi-Objective Optimization Model
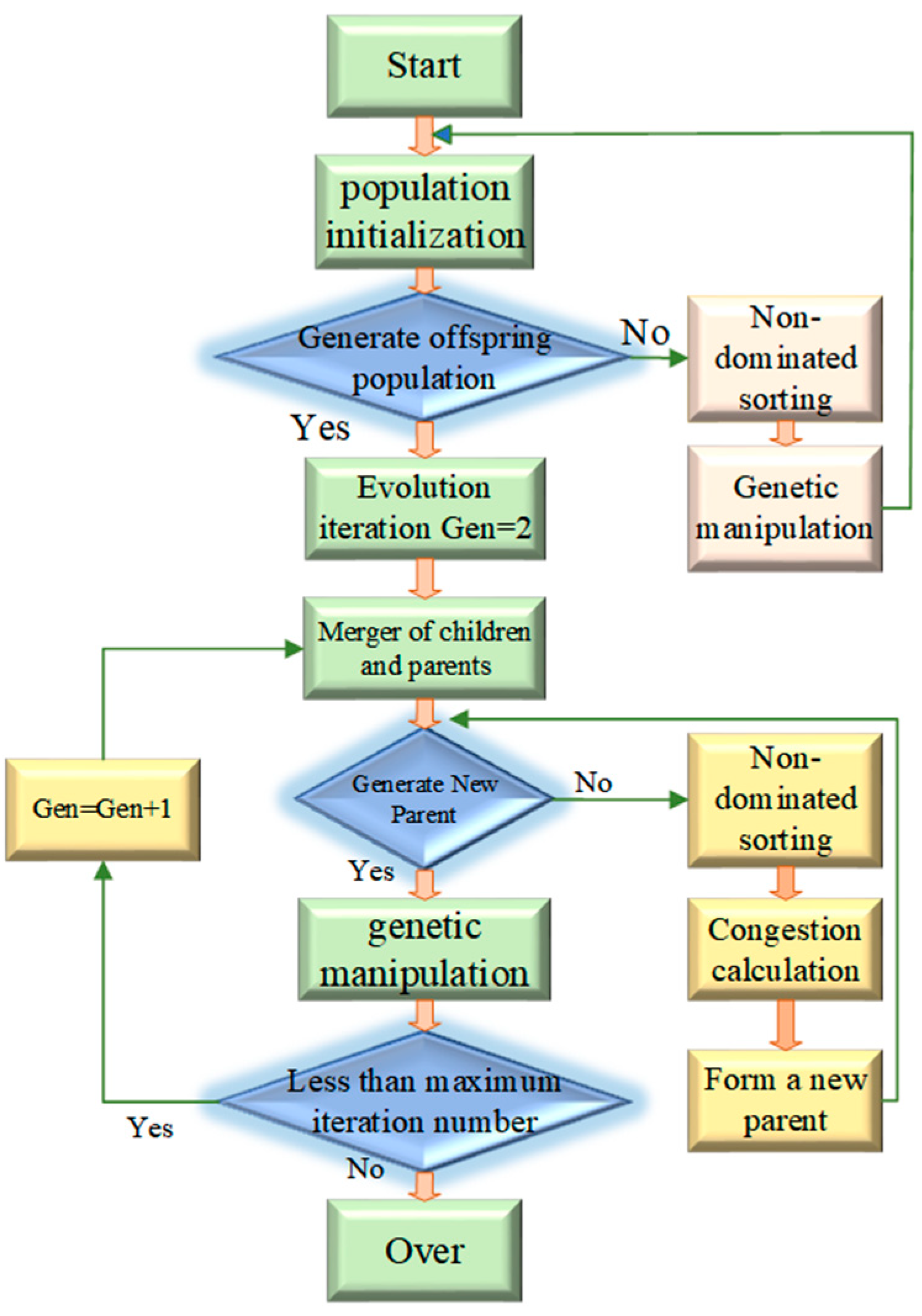
3.1. NSGA-II Algorithm
3.2. MATLAB Optimization Toolbox
- (1)
- According to the actual engineering conditions in the study area, the expression of the objective function is determined, the decision variables are determined, the constraints and control conditions are established according to the construction requirements, and the optimal mathematical model for solving the problem is established;
- (2)
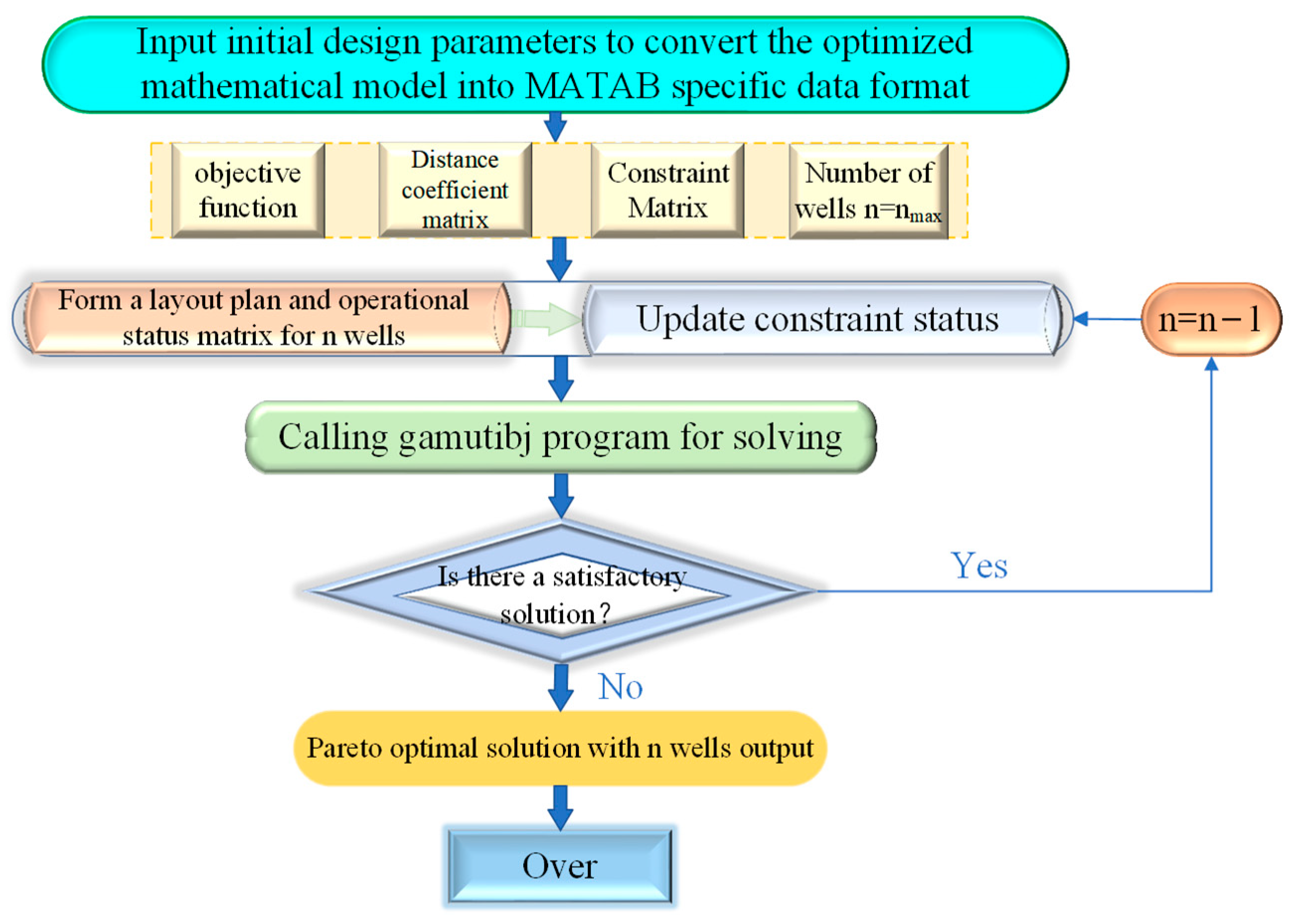
- Launch the MATLAB optimization toolbox and utilize the Gamultiobj program to input the established multi-objective optimization mathematical model into the toolbox, following the specific format guidelines;
- (3)
- Combined with the optimization code, the results of the optimization mathematical model are solved and output.
3.3. Program Design for Solving Multi-Objective Optimization Model
- (1)
- The program can simultaneously optimize the number of pumping wells and the pumping capacity of a single well, and it can obtain the Pareto optimal solution set under different working conditions;
- (2)
- The Pareto solution set is obtained based on the NSGA-II algorithm, with a uniform distribution of Pareto frontiers and while retaining more excellent solutions;
- (3)
- The program avoids complex programming steps and uses the MATLAB optimization solver to input parameters and output results in a visual form.
4. Engineering Background
4.1. General Situation
4.1.1. Engineering Geological Conditions
4.1.2. Hydrogeologic Condition
4.2. Initial Scheme of Foundation Pit Dewatering in the Study Area
5. Solving Pareto Optimal Solution Set and Analysis Decision
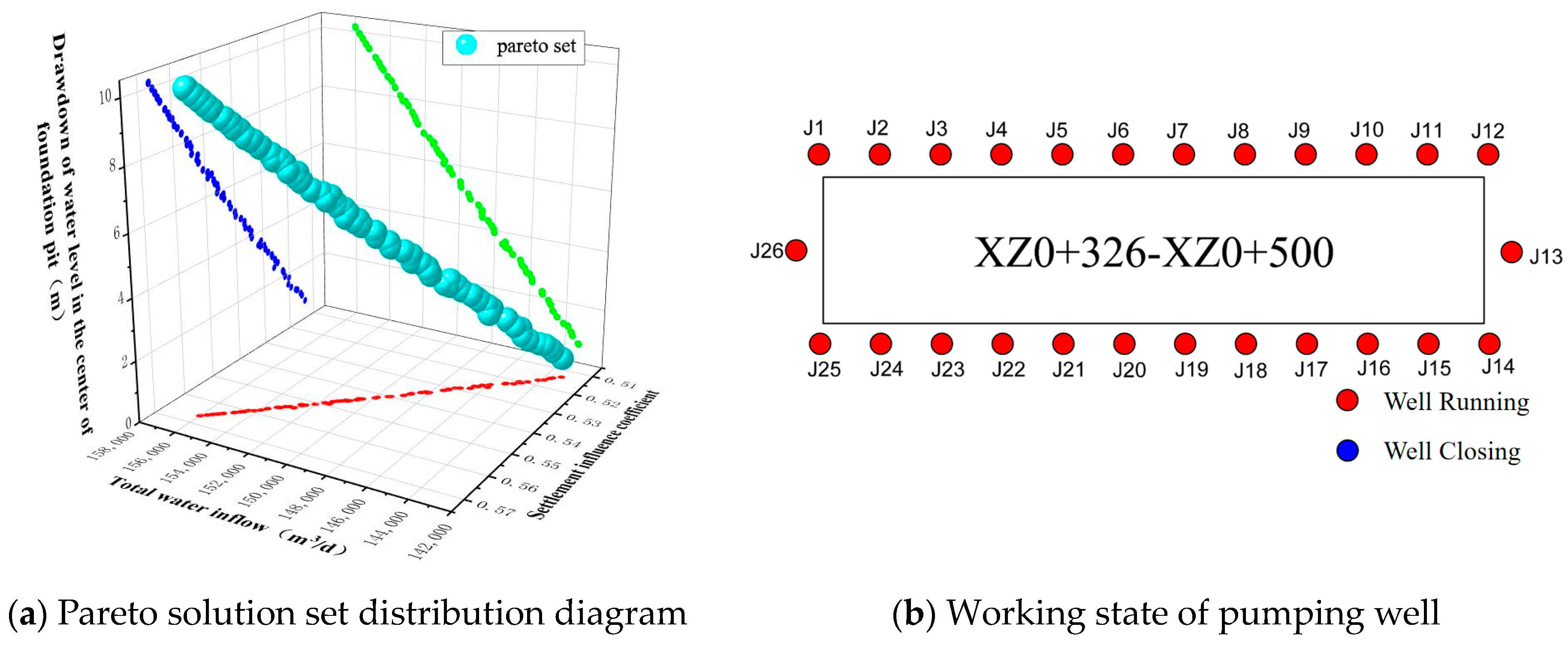
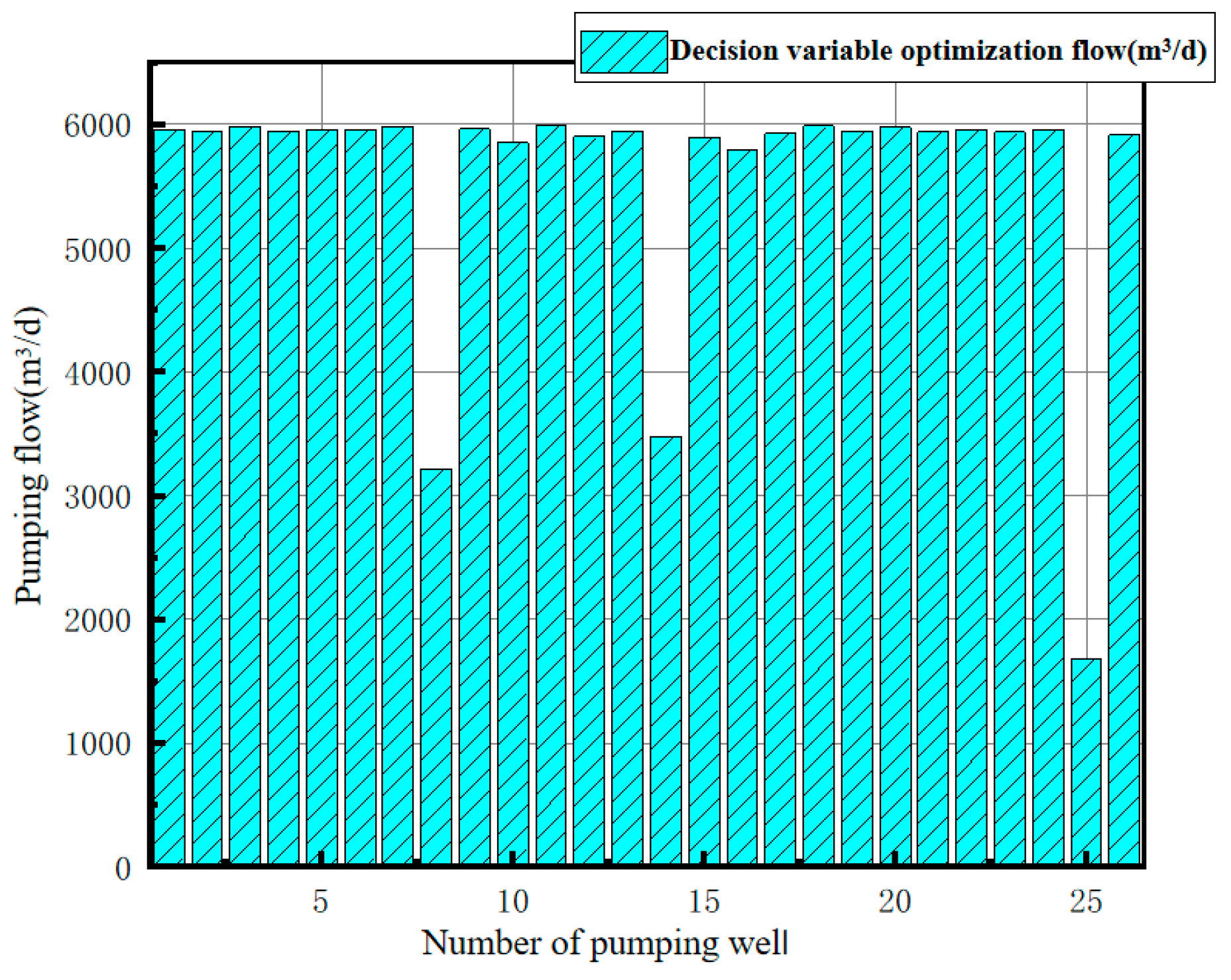
5.1. Pareto Optimal Solution Set and Analysis of Running 26 Pumping Wells Schemes
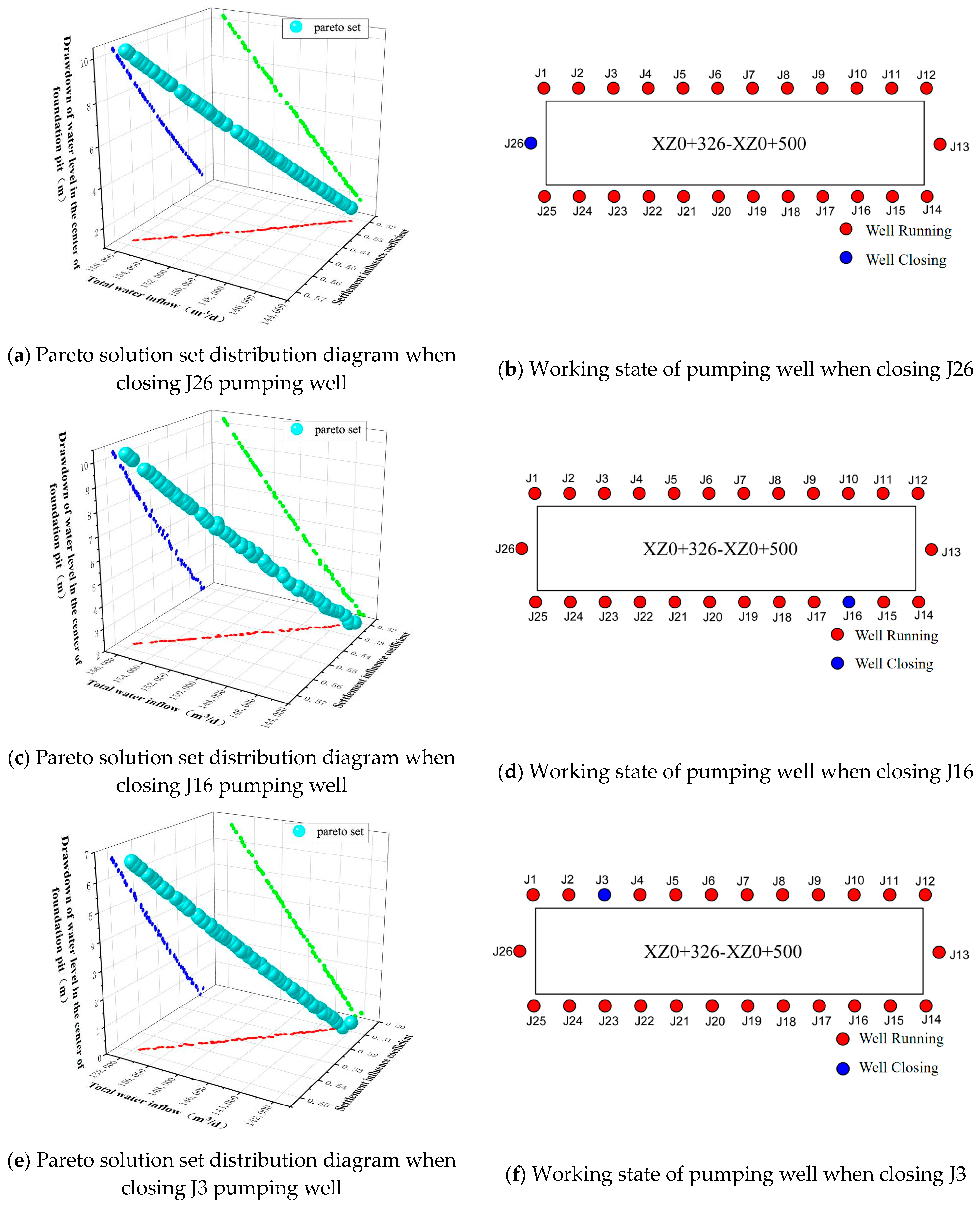
5.2. Pareto Optimal Solution Set and Analysis of Running 25 Pumping Wells Schemes
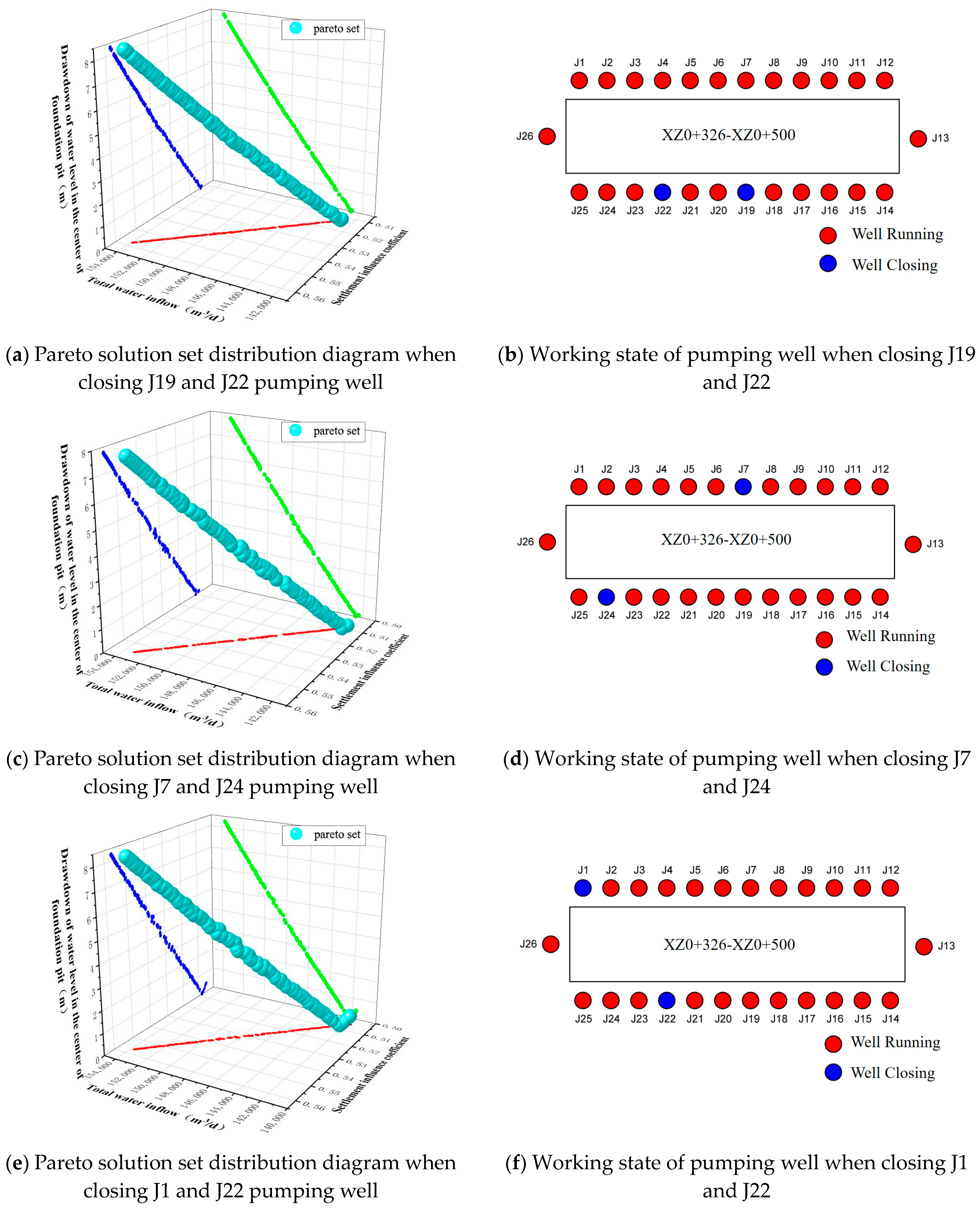
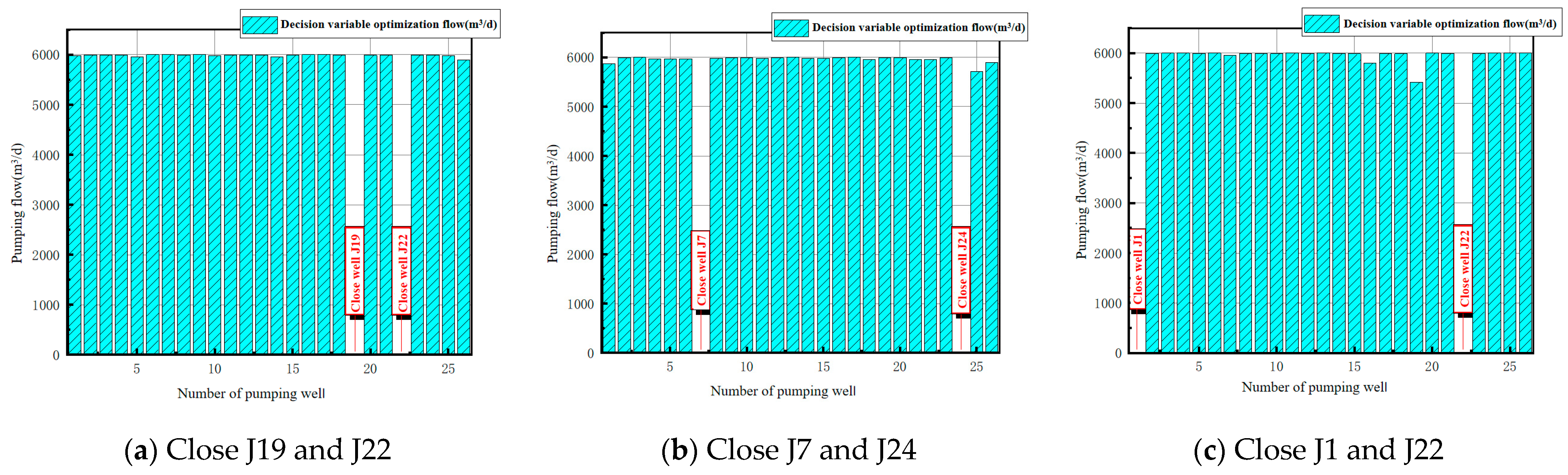
5.3. Pareto Optimal Solution Set and Analysis of Running 24 Pumping Wells Schemes
5.4. Pareto Optimal Solution Set Analysis and Decision Making
- (1)
- When giving priority to the total cost of dewatering, it is important to consider the drilling and pumping costs for foundation pit dewatering. Within the optional Pareto solution set, a solution with a smaller number of pumping wells and lower total pumping capacity should be the first choice based on the dewatering multi-objective optimization evaluation system. Specifically, the operation scheme of closing the J1 and J22 pumping wells under the third optimization condition can be preferred;
- (2)
- If the focus is on the impact of dewatering on the surrounding environment, preference should be given to a dewatering scheme with a settlement impact coefficient of less than 0.53. Specifically, the operation scheme corresponding to Pareto solution No. 1 under the first optimized condition in Table 5, and the operation scheme corresponding to closing the J3 pumping well under the second optimized condition in Table 7, can ensure minimal ground settlement under the conditions of meeting the total cost requirements of dewatering and the safety and stability of the foundation pit structure;
- (3)
- When prioritizing the safety and stability of the foundation pit structure, achieving a significant drawdown of the water level in the center of the foundation pit is crucial for ensuring successful construction and enhancing structural safety. Considering the dewatering multi-objective optimization evaluation system, a preferable dewatering scheme is to maintain the water level approximately 1.5 m below the bottom plate of the foundation pit. Therefore, the operation scheme of running 25 pumping wells while closing the J16 pumping well under the second working condition is recommended to meet the maximum drawdown of the water level.
6. Numerical Simulation Verification of Dewatering Optimization Scheme Based on GMS
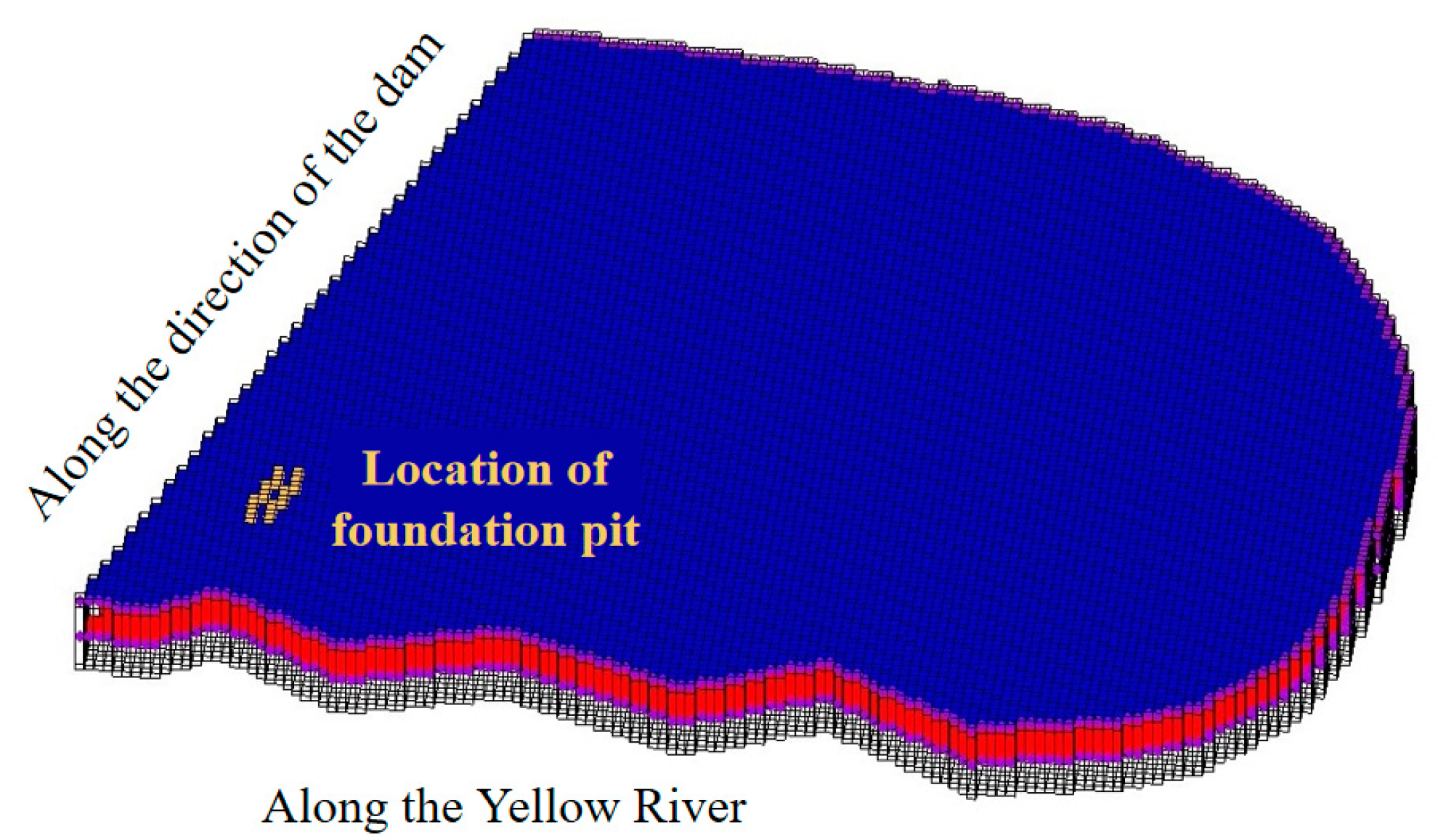
6.1. Element Subdivision of Numerical Model and Determination of Boundary Conditions
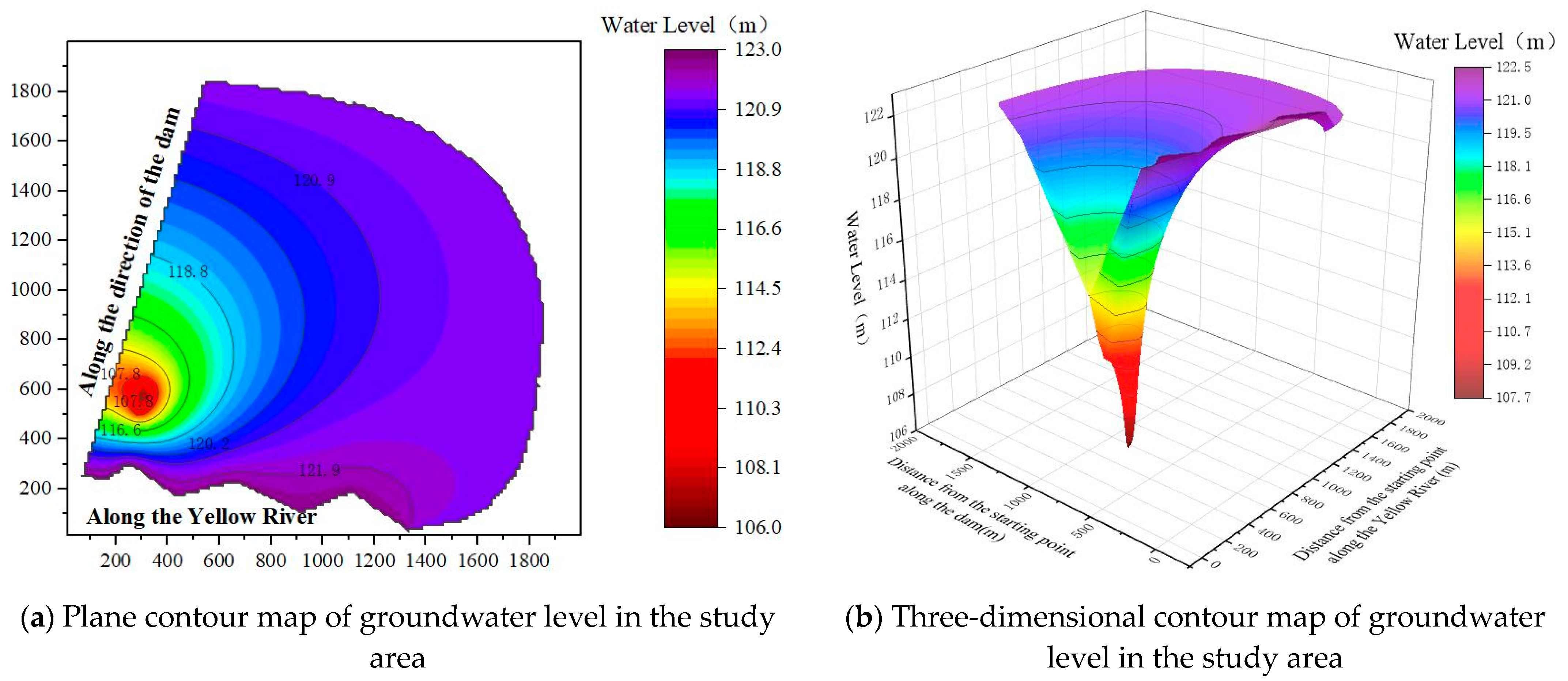
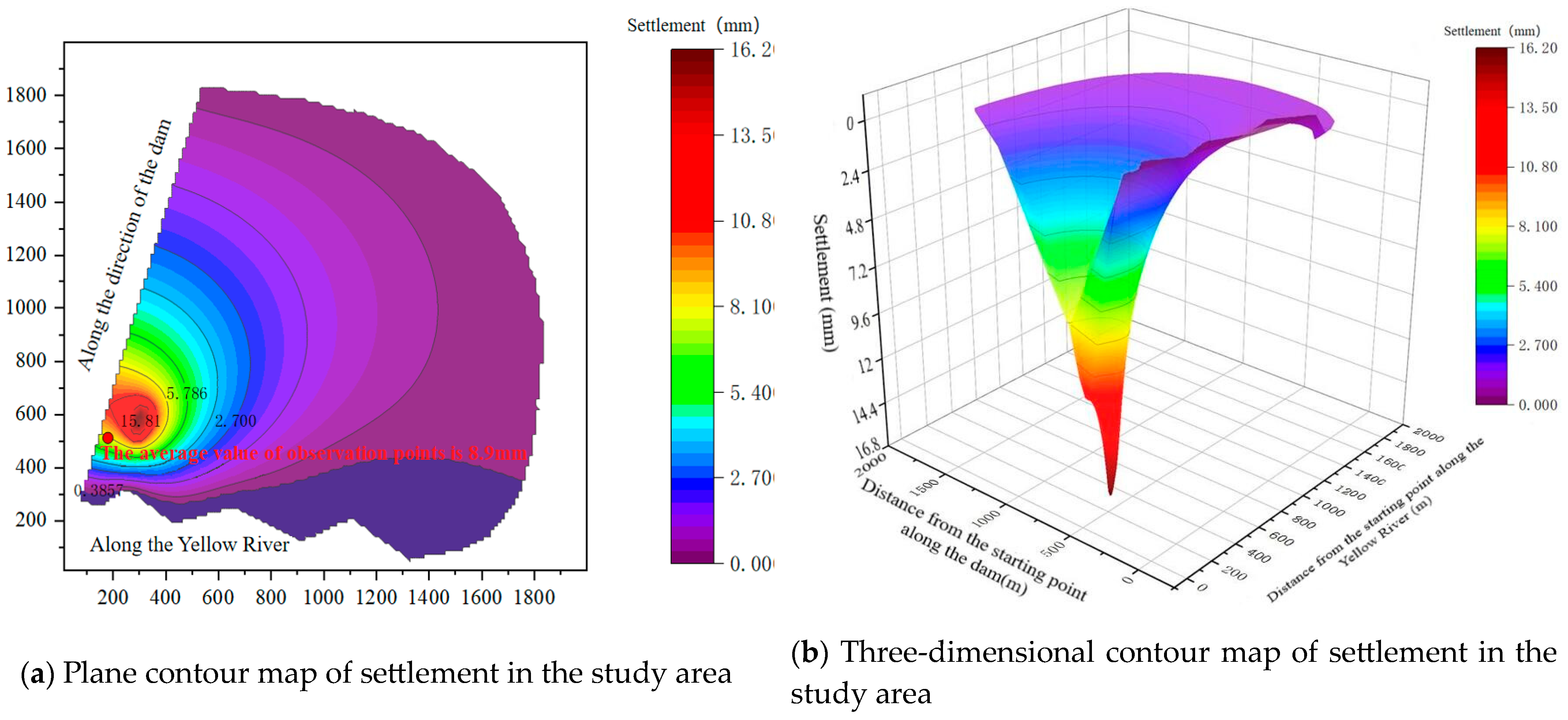
6.2. Numerical Simulation Results and Analysis
7. Conclusions
- (1)
- The objective function method is used to establish the multi-objective optimization mathematical model of foundation pit dewatering. Combined with the non-dominated sorting genetic algorithm NSGA-II and MATLAB optimization toolbox, the Gamultiobj program is called to develop an iterative program to optimize the pumping capacity of a single well and the number of pumping wells, and the solving process is given. The advantages of multi-objective optimization based on NSGA-II are that the uniformly distributed Pareto optimal solution set can be obtained, and multi-objective optimization problems for foundation pit dewatering can more quickly and efficiently be handled based on the fast-elite selection strategy. Using the Analytic Hierarchy Process (AHP) combined with the evaluation scoring method to establish an evaluation system, the candidate set with high scores in the Pareto solution set is used as the decision-making basis. The construction of an evaluation system combining NSGA-II and AHP applied in foundation pit dewatering engineering represents an innovative technology and method.
- (2)
- Using the NSGA-II algorithm and MATLAB optimization toolbox programming, the dewatering optimization of the foundation pit project of the inverted siphon section of the canal head (pile No. XZ0+326–XZ0+500) in the water conservancy and irrigation area engineering of the Xixiayuan water conservancy project was carried out, and the Pareto optimal solution set under three optimal conditions (24 to 26 pumping wells in running) was obtained. By incorporating the dewatering multi-objective optimization evaluation system based on the Analytic Hierarchy process, the optimization scheme within the set of Pareto optimal solutions is chosen as the ultimate decision for optimization. This scheme takes into account three objectives: the total dewatering cost, the settlement influence coefficient, and the safety and stability of the foundation pit structure. Consequently, it offers a range of workable plans for the construction of the foundation pit dewatering.
- (3)
- The study area’s numerical model is created using the MODFLOW module and SUB subroutine package within GMS. The optimization outcomes for the decision variables in the dewatering scheme, which involves operating 24 pumping wells and closing the J19 and J22 pumping wells based on the third optimal condition, are applied to the numerical model. The numerical simulation of this optimized scheme validates the scientific nature and accuracy of the multi-objective optimization model for foundation pit dewatering. Importantly, the established multi-objective optimization model and evaluation system offer numerous viable dewatering optimization plans.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.Q.; Li, M.G.; Wang, J.H.; Chen, J.J.; Zhu, Y.F. Field tests of pumping-recharge technology for deep confined aquifers and its application to a deep excavation. Eng. Geol. 2017, 228, 249–259. [Google Scholar] [CrossRef]
- Sharifi, M.R.; Akbarifard, S.; Madadi, M.R.; Qaderi, K.; Akbarifard, H. Optimization of hydropower energy generation by 14 robust evolutionary algorithms. Sci. Rep. 2022, 12, 7739. [Google Scholar] [CrossRef]
- Wang, X.L.; Li, S.H.; Chen, H.Y.; Wang, X.F.; Mei, Y. Multi-objective and multi region power grid planning based on non dominated genetic algorithm and coevolutionary algorithm. Proceeding CSEE 2006, 12, 11–15. [Google Scholar]
- Xu, Y.; Yan, Y. Optimal Design of Foundation Pit Dewatering Based on Objective Functions and Numerical Analysis. Adv. Mater. Res. 2011, 368–373, 2495–2499. [Google Scholar] [CrossRef]
- Liu, J.; Luo, X. Application of Genetic Algorithm in Deep Foundation Pit Dewatering. Site Investig. Sci. Technol. 2000, 3, 42–45. [Google Scholar]
- Yang, Y.; Wu, J.; Sun, X.; Wu, J.; Zheng, C. Development and application of a master-slave parallel hybrid multi-objective evolutionary algorithm for groundwater remediation design. Environ. Earth Sci. 2013, 70, 2481–2494. [Google Scholar] [CrossRef]
- Wahid, F.; Alsaedi, A.K.Z.; Ghazali, R. Using improved firefly algorithm based on genetic algorithm crossover operator for solving optimization problems. J. Intell. Fuzzy Syst. 2019, 36, 1547–1562. [Google Scholar] [CrossRef]
- Geng, J.; Cui, Z.; Gu, X. Scatter search-based particle swarm optimization algorithm for earliness/tardiness flow shop scheduling with uncertainty. Int. J. Autom. Comput. 2016, 13, 285–295. [Google Scholar] [CrossRef]
- Li, N.; Zou, T.; Sun, D. Multi-objective optimization algorithm based on particle swarm optimization. Comput. Eng. Appl. 2005, 23, 43–46. [Google Scholar]
- Ma, C. Multi-Objective Optimization of Subway Construction Projects Based on Improved Genetic Algorithm. Ph.D. Thesis, Lanzhou Jiaotong University, Lanzhou, China, 2020. [Google Scholar]
- Khodadadi, N.; Azizi, M.; Talatahari, S.; Sareh, P. Multi-Objective Crystal Structure Algorithm (MOCryStAl): Introduction and Performance Evaluation. IEEE Access 2021, 9, 117795–117812. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Mirjalili, S.; Chakrabortty, R.K.; Ryan, M. An Efficient Marine Predators Algorithm for Solving Multi-Objective Optimization Problems: Analysis and Validations. IEEE Access 2021, 9, 42817–42844. [Google Scholar] [CrossRef]
- Sang-To, T.; Le-Minh, H.; Wahab, M.A.; Thanh, C.-L. A new metaheuristic algorithm: Shrimp and Goby association search algorithm and its application for damage identification in large-scale and complex structures. Adv. Eng. Softw. 2023, 176, 103363. [Google Scholar] [CrossRef]
- Sang-To, T.; Le-Minh, H.; Mirjalili, S.; Wahab, M.A.; Cuong-Le, T. A new movement strategy of grey wolf optimizer for optimization problems and structural damage identification. Adv. Eng. Softw. 2022, 173, 103276. [Google Scholar] [CrossRef]
- Prina, M.G.; Cozzini, M.; Garegnani, G.; Manzolini, G.; Moser, D.; Oberegger, U.F.; Pernetti, R.; Vaccaro, R.; Sparber, W. Multi-objective optimization algorithm coupled to EnergyPLAN software: The EPLANopt model. Energy 2018, 149, 213–221. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, H.; Tu, L. A modified particle swarm optimization for multimodal multi-objective optimization. Eng. Appl. Artif. Intell. 2020, 95, 103905. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Muiltiobjective Optimization Using Nondominated Sorting in Genetic Algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Xu, T.; He, J.; Shang, C.; Ying, W. A New Multi-objective Model for Constrained Optimisation. In Advances in Computational Intelligence Systems; Springer: Cham, Switzerland, 2017; pp. 71–85. [Google Scholar] [CrossRef]
- Mirjalili, S.Z.; Mirjalili, S.; Saremi, S.; Faris, H.; Aljarah, I. Grasshopper optimization algorithm for multi-objective optimization problems. Appl. Intell. 2018, 48, 805–820. [Google Scholar] [CrossRef]
- Wang, X.; Li, S. Multi-Objective Optimization Using Cooperative Garden Balsam Optimization with Multiple Populations. Appl. Sci. 2022, 12, 5524. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, M.; Xu, X.; Yen, G.G. Multi-objective evolution strategy for multimodal multi-objective optimization. Appl. Soft Comput. J. 2021, 101, 107004. [Google Scholar] [CrossRef]
- Dhiman, G.; Singh, K.K.; Soni, M.; Nagar, A.; Dehghani, M.; Slowik, A.; Kaur, A.; Sharma, A.; Houssein, E.H.; Cengiz, K. MOSOA: A new multi-objective seagull optimization algorithm. Expert Syst. Appl. 2021, 167, 114150. [Google Scholar] [CrossRef]
- Jamil, M.A.; Nour, M.K.; Alotaibi, S.S.; Hussain, M.J.; Hussaini, S.M.; Naseer, A. Software Product Line Maintenance Using Multi-Objective Optimization Techniques. Appl. Sci. 2023, 15, 9010. [Google Scholar] [CrossRef]
- Guan, Y.; Chu, Y.; Lv, M.; Li, S.; Li, H.; Dong, S.; Su, Y. Application of Strength Pareto Evolutionary Algorithm II in Multi-Objective Water Supply Optimization Model Design for Mountainous Complex Terrain. Sustainability 2023, 15, 12091. [Google Scholar] [CrossRef]
- Huynh, T.Q.; Nguyen, T.T.; Nguyen, H. Base resistance of super-large and long piles in soft soil: Performance of artificial neural network model and field implications. Acta Geotechica 2023, 18, 2755–2775. [Google Scholar] [CrossRef]
- Li, Y.; Hariri-Ardebili, M.A.; Deng, T.; Wei, Q.; Cao, M. A surrogate-assisted stochastic optimization inversion algorithm: Parameter identification of dams. Adv. Eng. Inform. 2023, 55, 101853. [Google Scholar] [CrossRef]
- Wu, J.; Zhu, X. Development trend of groundwater flow numerical simulation software based on MODFLOW. Eng. Investig. 2000, 2, 12–15. [Google Scholar]
- Rong, Y.; Fang, Z. Risk assessment of ground settlement induced by construction dewatering of Taizhou Bridge anchorage caisson foundation. In Proceedings of the 2011 Second International Conference on Mechanic Automation and Control Engineering, Huhhot, China, 15–17 July 2011. [Google Scholar] [CrossRef]
- Corne, D.W.; Knowles, J.D.; Oates, M.J. The Pareto envelope-based selection algorithm for multiobjective optimization: International Conference on Parallel Problem Solving from Nature. Lect. Notes Comput. Sci. 2000, 1917, 839–848. [Google Scholar]
- Sharma, S.; Kumar, V. A Comprehensive Review on Multi-objective Optimization Techniques: Past, Present and Future. Arch. Comput. Methods Eng. 2022, 29, 5605–5633. [Google Scholar] [CrossRef]
- Shi, F. Analysis of 30 Cases of MATLAB Intelligent Algorithms [M]; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2011. [Google Scholar]
- Furtuna, R.; Curteanu, S.; Leon, F. An elitist non-dominated sorting genetic algorithm enhanced with a neural network applied to the multi-objective optimization of a polysiloxane synthesis process. Eng. Appl. Artif. Intell. 2011, 24, 772–785. [Google Scholar] [CrossRef]
- JGJ/120-2012; Technical Regulations for Building Foundation Pit Support. Ministry of Housing and Urban-Rural Development, People’s Republic of China: Beijing, China, 2012.
- GB50202-2018; The Construction Quality Acceptance Code for Building Foundation Engineering. Ministry of Housing and Urban-Rural Development, People’s Republic of China: Beijing, China, 2018.
- Zhao, Y.; Dong, X.; Wang, H.; Wang, J.; Wei, Y.; Huang, Y.; Xue, R. Comparative Study on the Application of Different Slug Test Models for Determining the Permeability Coefficients of Rock Mass in Long-Distance Deep Buried Tunnel Projects. Appl. Sci. 2022, 12, 10235. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, H.; Lv, P.; Dong, X.; Huang, Y.; Wang, J.; Yang, Y. Theoretical Model and Experimental Research on Determining Aquifer Permeability Coefficients by Slug Test under the Influence of Positive Well-Skin Effect. Water 2022, 14, 3089. [Google Scholar] [CrossRef]
- Zhao, Y.; Wei, Y.; Dong, X.; Rong, R.; Wang, J.; Wang, H. The Application and Analysis of Slug Test on Determining the Permeability Parameters of Fractured Rock Mass. Appl. Sci. 2022, 12, 7569. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, Z.; Rong, R.; Dong, X.; Wang, J. A new calculation method for hydrogeological parameters from unsteady-flow pumping tests with a circular constant water-head boundary of finite scale. Q. J. Eng. Geol. Hydrogeol. 2022, 55, qjegh2021-112. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A | A1 | A2 | A3 | W0 | W0 Normalization |
|---|---|---|---|---|---|
| A1 | 1 | 1/3 | 1/5 | 0.492 | 0.109 |
| A2 | 3 | 1 | 1/2 | 1.39 | 0.309 |
| A3 | 5 | 2 | 1 | 2.617 | 0.582 |
| Sub-Target Layer | Parameter Range | Scoring Value (0–100) |
|---|---|---|
| Total cost of dewatering (Minimum total pumping flow, m3/d) | 1.45 105 | 95 |
| 1.45 105–1.5 105 | 85 | |
| 1.5 105–1.55 105 | 75 | |
| 1.55 105 | 65 | |
| Impact of settlement on environment (Settlement influence coefficient) | 0.53 | 90 |
| 0.53–0.55 | 80 | |
| 0.55–0.57 | 70 | |
| Safety and stability of foundation pit structure (The central water level is lower than the foundation pit bottom plate, m) | 1.8 | 90 |
| 0.6–1.8 | 80 | |
| 0–0.6 | 70 |
| Function | Description |
|---|---|
| Fgoalattain | Multi-objective achievement problem |
| Fmincon | Constrained nonlinear minimization |
| Fminimax | Minimization and maximum |
| Linprog | Linear program |
| Quadprog | Quadratic programming |
| Gamultiobj | Multi-objective nonlinear minimization |
| Foundation Pit Section | K/(m/d) | Influence Radius R/(m) | / (m3/d) | Number of Pumping Wells | Water Level Control Point | Settlement Control Points | Total Q/(m3/d) |
|---|---|---|---|---|---|---|---|
| XZ0+326– XZ0+500 | 432 | 2242.5 | 6000 | 26 | 5 | 2 | 156,000 |
| Pareto Solution No. | Score for Objective Ⅰ | Score for Objective Ⅱ | Score of Objective Ⅲ | Weighted Scores of Three Objectives of Dewatering Optimization |
|---|---|---|---|---|
| 1 | 95 | 90 | 90 | 90.545 |
| 2 | 85 | 90 | 90 | 89.455 |
| 3 | 85 | 80 | 90 | 86.365 |
| 4 | 75 | 80 | 90 | 85.275 |
| 5 | 95 | 90 | 80 | 84.725 |
| 6 | 75 | 70 | 90 | 82.185 |
| 7 | 65 | 70 | 90 | 81.095 |
| Each Objective | Well Status | Total Pumping Flow/(m3/d) | Settlement Value (mm) | The Distance Where Water Level in the Center of the Foundation Pit Is Lower than the Bottom Plate/(m) | Hydraulic Gradient Value | |
|---|---|---|---|---|---|---|
| Schemes | ||||||
| Preliminary scheme | 26 wells in running | 156,000 | <15 | >0 | <0.9 | |
| The first optimized working condition | 26 wells in running | 144,972 | 7.8 | 1.84 | 0.65 | |
| Each Scheme | Pareto Solution No. | Score for Objective Ⅰ | Score for Objective Ⅱ | Score of Objective Ⅲ | Weighted Scores of Three Objectives of Dewatering Optimization |
|---|---|---|---|---|---|
| Close J26 pumping well | 1 | 85 | 90 | 90 | 89.455 |
| 2 | 85 | 80 | 90 | 86.365 | |
| 3 | 75 | 80 | 90 | 85.275 | |
| 4 | 95 | 90 | 80 | 84.725 | |
| 5 | 85 | 90 | 80 | 83.635 | |
| 6 | 65 | 70 | 90 | 81.095 | |
| Close J16 pumping well | 1 | 85 | 90 | 90 | 89.455 |
| 2 | 85 | 90 | 90 | 89.455 | |
| 3 | 85 | 80 | 90 | 86.365 | |
| 4 | 75 | 80 | 90 | 85.275 | |
| 5 | 95 | 90 | 80 | 84.725 | |
| 6 | 75 | 70 | 90 | 82.185 | |
| Close J3 pumping well | 1 | 85 | 90 | 90 | 89.455 |
| 2 | 85 | 90 | 90 | 89.455 | |
| 3 | 85 | 80 | 90 | 86.365 | |
| 4 | 75 | 80 | 90 | 85.275 | |
| 5 | 95 | 90 | 80 | 84.725 | |
| 6 | 75 | 70 | 90 | 82.185 |
| Each Objective | Well Status | Total Pumping Flow/(m3/d) | Settlement Value (mm) | The Distance Where Water Level in the Center of the Foundation Pit Is Lower than the Bottom Plate/(m) | Hydraulic Gradient Value | |
|---|---|---|---|---|---|---|
| Schemes | ||||||
| Preliminary scheme | 26 wells in running | 156,000 | <15 | >0 | <0.9 | |
| The second optimized working condition | Close J26 | 145,498 | 7.9 | 1.85 | 0.65 | |
| Close J16 | 149,608 | 8.4 | 1.88 | 0.67 | ||
| Close J3 | 145,037 | 7.7 | 1.83 | 0.63 | ||
| Each Scheme | Pareto Solution No. | Score for Objective Ⅰ | Score for Objective Ⅱ | Score of Objective Ⅲ | Weighted Scores of Three Objectives of Dewatering Optimization |
|---|---|---|---|---|---|
| Close J19 and J22 pumping wells | 1 | 95 | 90 | 90 | 90.545 |
| 2 | 85 | 80 | 90 | 86.365 | |
| 3 | 75 | 80 | 90 | 85.275 | |
| 4 | 95 | 90 | 80 | 84.725 | |
| 5 | 75 | 70 | 90 | 82.185 | |
| 6 | 95 | 90 | 70 | 78.905 | |
| Close J7 and J24 pumping wells | 1 | 95 | 90 | 90 | 90.545 |
| 2 | 85 | 80 | 90 | 86.365 | |
| 3 | 75 | 80 | 90 | 85.275 | |
| 4 | 95 | 90 | 80 | 84.725 | |
| 5 | 75 | 70 | 90 | 82.185 | |
| 6 | 95 | 90 | 70 | 78.905 | |
| Close J1 and J22 pumping wells | 1 | 95 | 90 | 90 | 90.545 |
| 2 | 85 | 80 | 90 | 86.365 | |
| 3 | 75 | 80 | 90 | 85.275 | |
| 4 | 95 | 90 | 80 | 84.725 | |
| 5 | 75 | 70 | 90 | 82.185 | |
| 6 | 95 | 90 | 70 | 78.905 |
| Each Objective | Well Status | Total Water Inflow/(m3/d) | Settlement Value (mm) | The Distance Where Water Level in the Center of the Foundation Pit Is Lower Than the Bottom Plate/(m) | Hydraulic Gradient Value | |
|---|---|---|---|---|---|---|
| Schemes | ||||||
| Preliminary scheme | 26 wells in running | 156,000 | <15 | >0 | <0.9 | |
| The third optimized working condition | Close J19, J22 | 143,665 | 7.95 | 1.84 | 0.66 | |
| Close J7, J24 | 143,121 | 7.95 | 1.83 | 0.65 | ||
| Close J1, J22 | 143,036 | 7.95 | 1.83 | 0.65 | ||
| Aquifer | Permeability Coefficient K/(m/d) | Specific Yield | Porosity | Elastic Water Storage Rate (1/m) | Inelastic Water Storage Rate |
|---|---|---|---|---|---|
| Sandy loam soil layer | 0.35 | 0.05 | 0.3 | 6 × 10−4 | 1.2 × 10−3 |
| Pebble layer | 432 | 0.2 | 0.4 | 1.2 × 10−4 | 1.6 × 10−4 |
| Types | The Distance Where Water Level in the Center of the Foundation Pit Is Lower than the Bottom Plate/(m) | Mean Value of Ground Settlement Observation Points/(mm) | Total Pumping Wells Flow/(m3/d) |
|---|---|---|---|
| Allowable value | >0 | <15 | <144,000 |
| Optimal results | 1.84 | 7.95 | 143,665 |
| Numerical simulation results | 1.40 | 8.9 | 143,815 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Wang, J.; Zhao, Y.; Li, B.; Wei, Y. Research on Multi-Objective Optimization Model of Foundation Pit Dewatering Based on NSGA-II Algorithm. Appl. Sci. 2023, 13, 10865. https://doi.org/10.3390/app131910865
Ma Z, Wang J, Zhao Y, Li B, Wei Y. Research on Multi-Objective Optimization Model of Foundation Pit Dewatering Based on NSGA-II Algorithm. Applied Sciences. 2023; 13(19):10865. https://doi.org/10.3390/app131910865
Chicago/Turabian StyleMa, Zhiheng, Jinguo Wang, Yanrong Zhao, Bolin Li, and Yufeng Wei. 2023. "Research on Multi-Objective Optimization Model of Foundation Pit Dewatering Based on NSGA-II Algorithm" Applied Sciences 13, no. 19: 10865. https://doi.org/10.3390/app131910865
APA StyleMa, Z., Wang, J., Zhao, Y., Li, B., & Wei, Y. (2023). Research on Multi-Objective Optimization Model of Foundation Pit Dewatering Based on NSGA-II Algorithm. Applied Sciences, 13(19), 10865. https://doi.org/10.3390/app131910865