


Experimental Design and Validation of an Adjustable Straw Guide Structure for a Grain Combine Harvester Thresher Based on a Material Movement Model



Abstract
:Featured Application
Abstract
1. Introduction
2. Structure Design and Model Analysis of Straw Guide
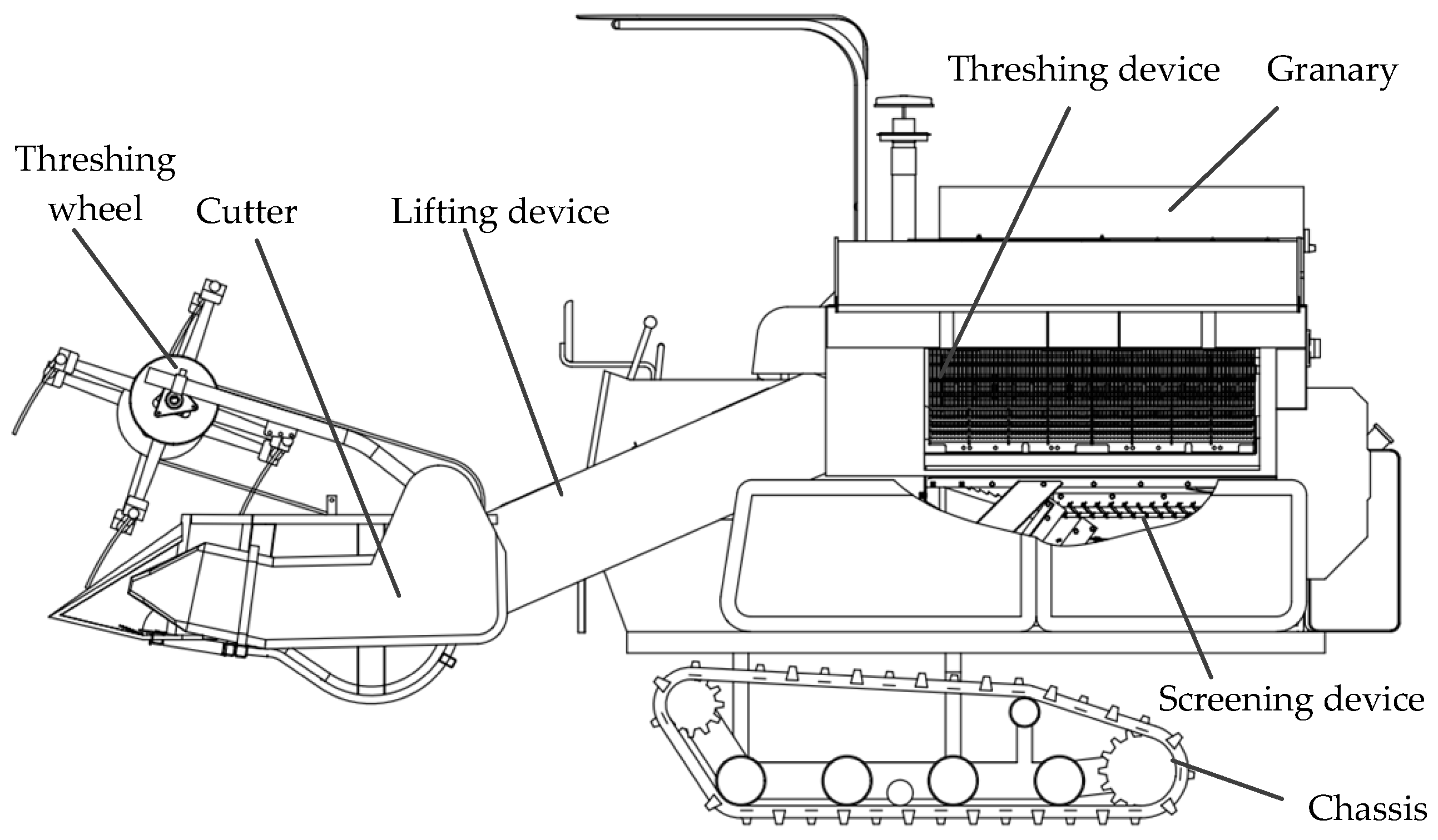
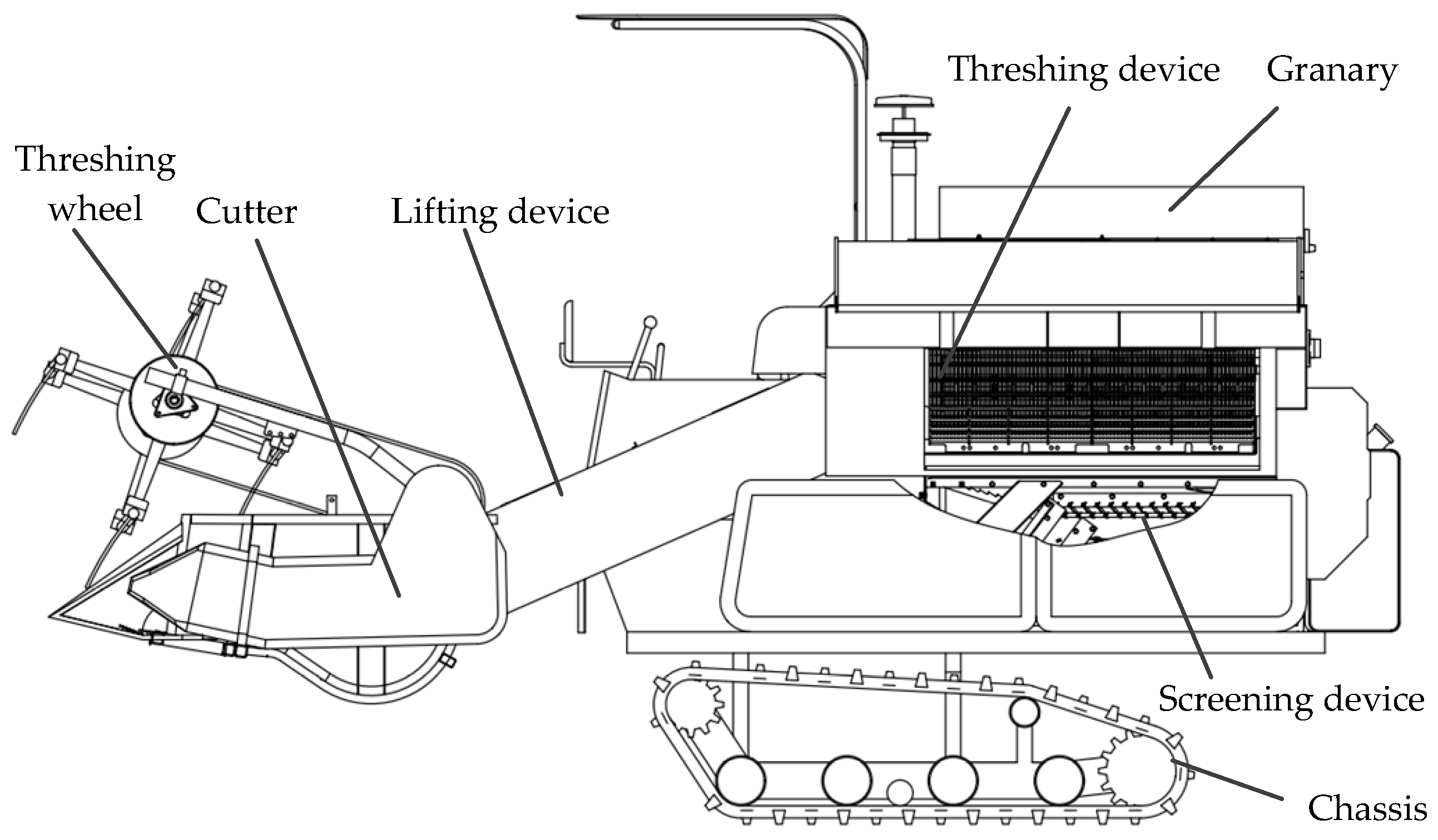
2.1. Overall Structure of the Harvester
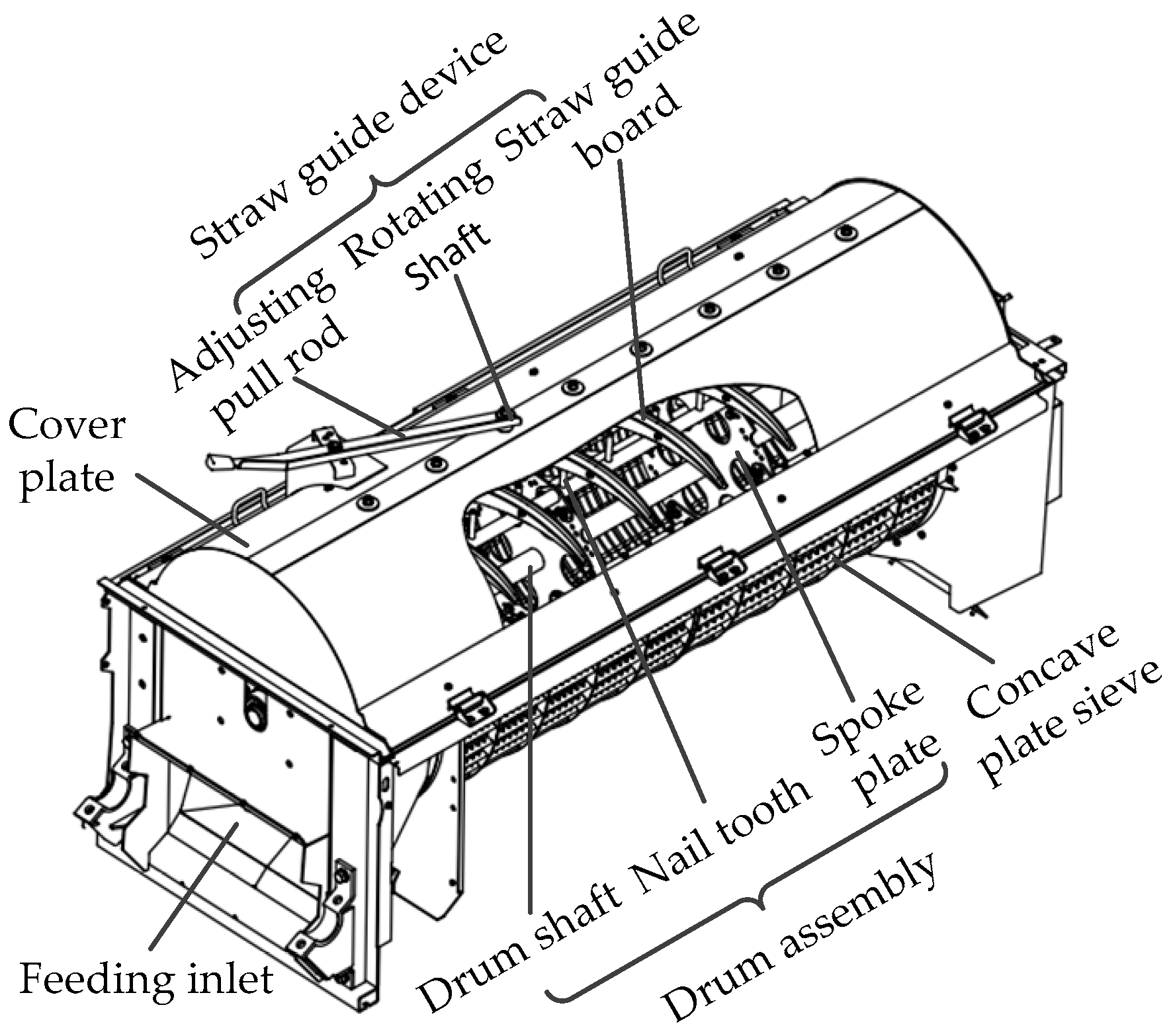
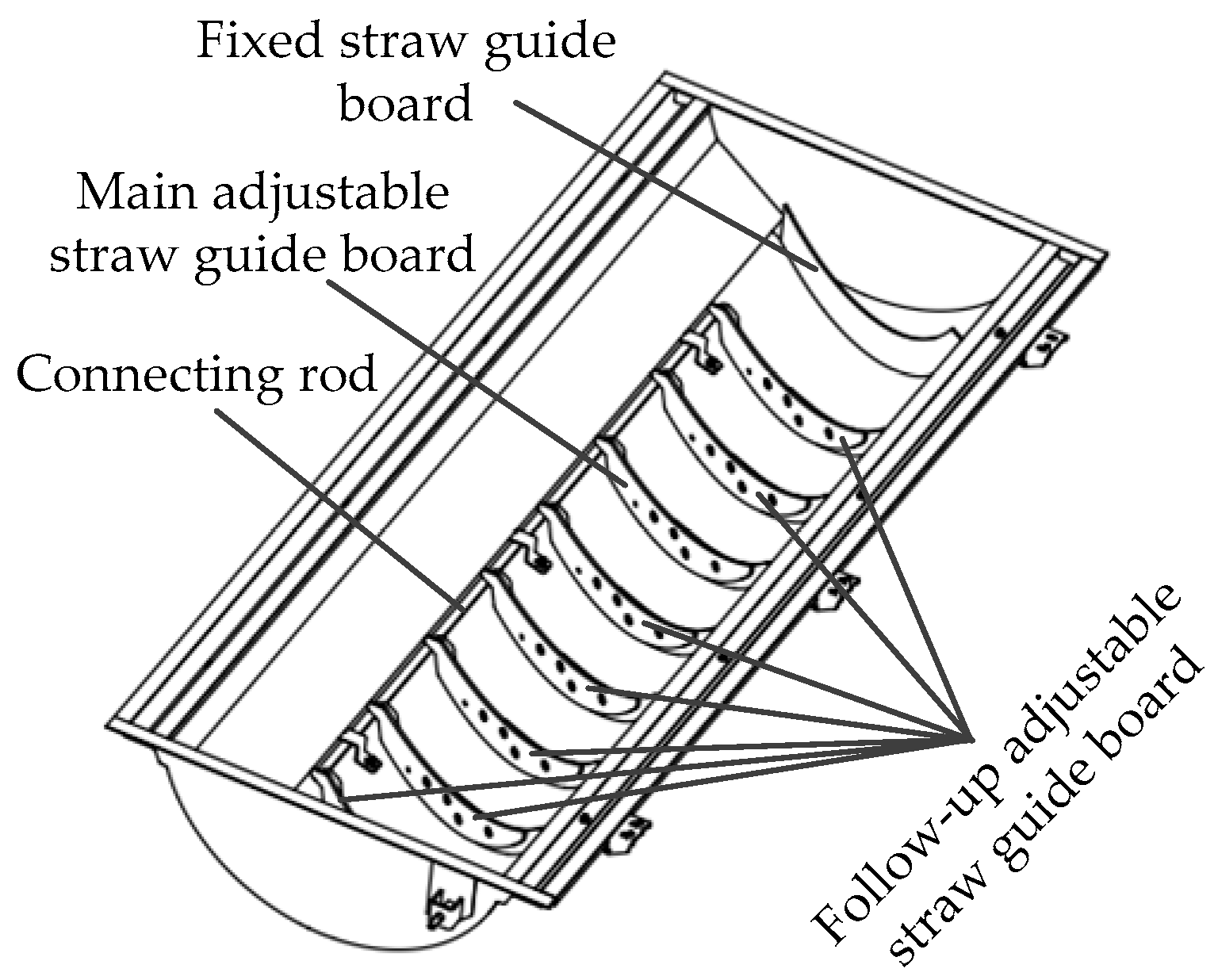
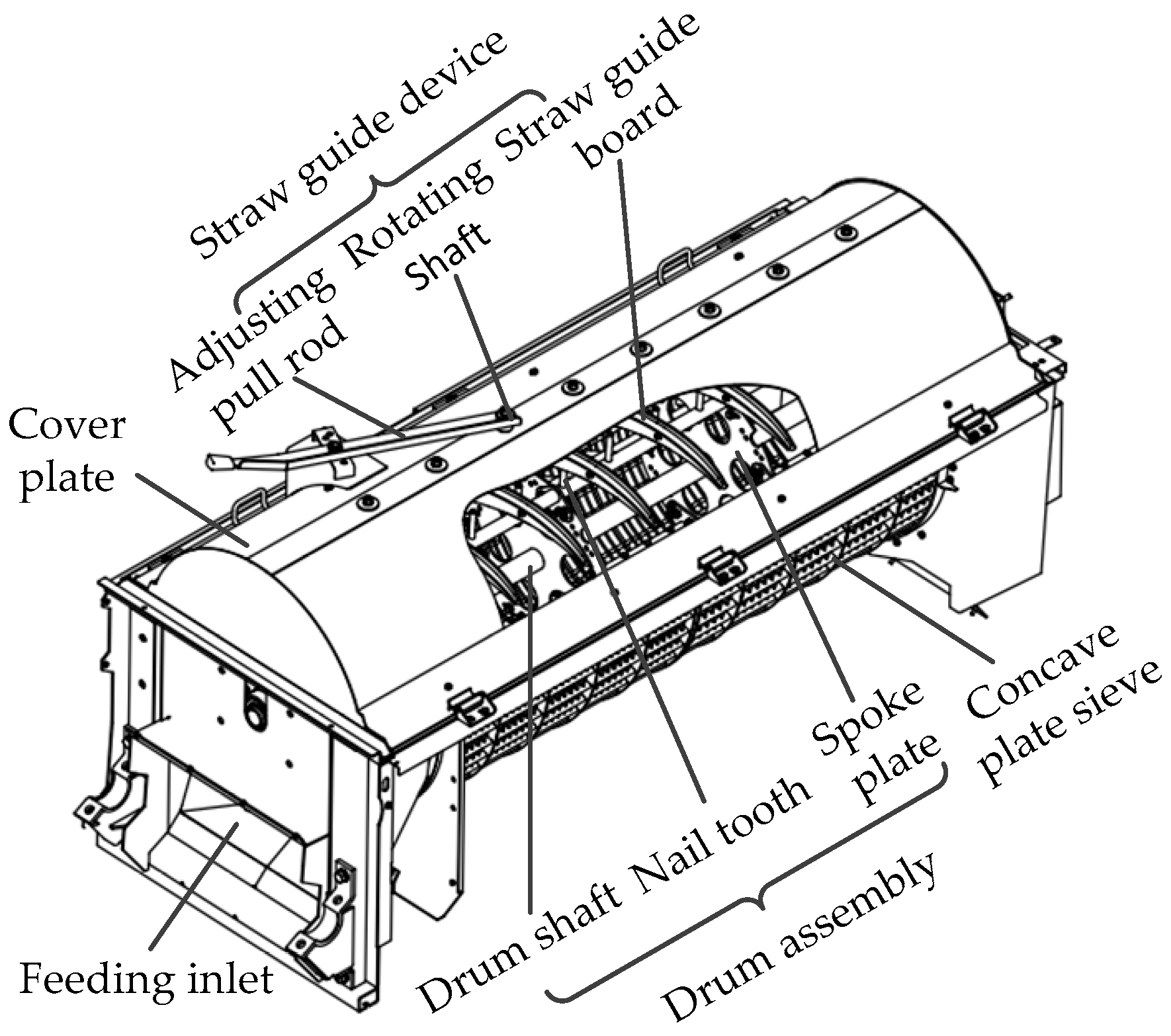
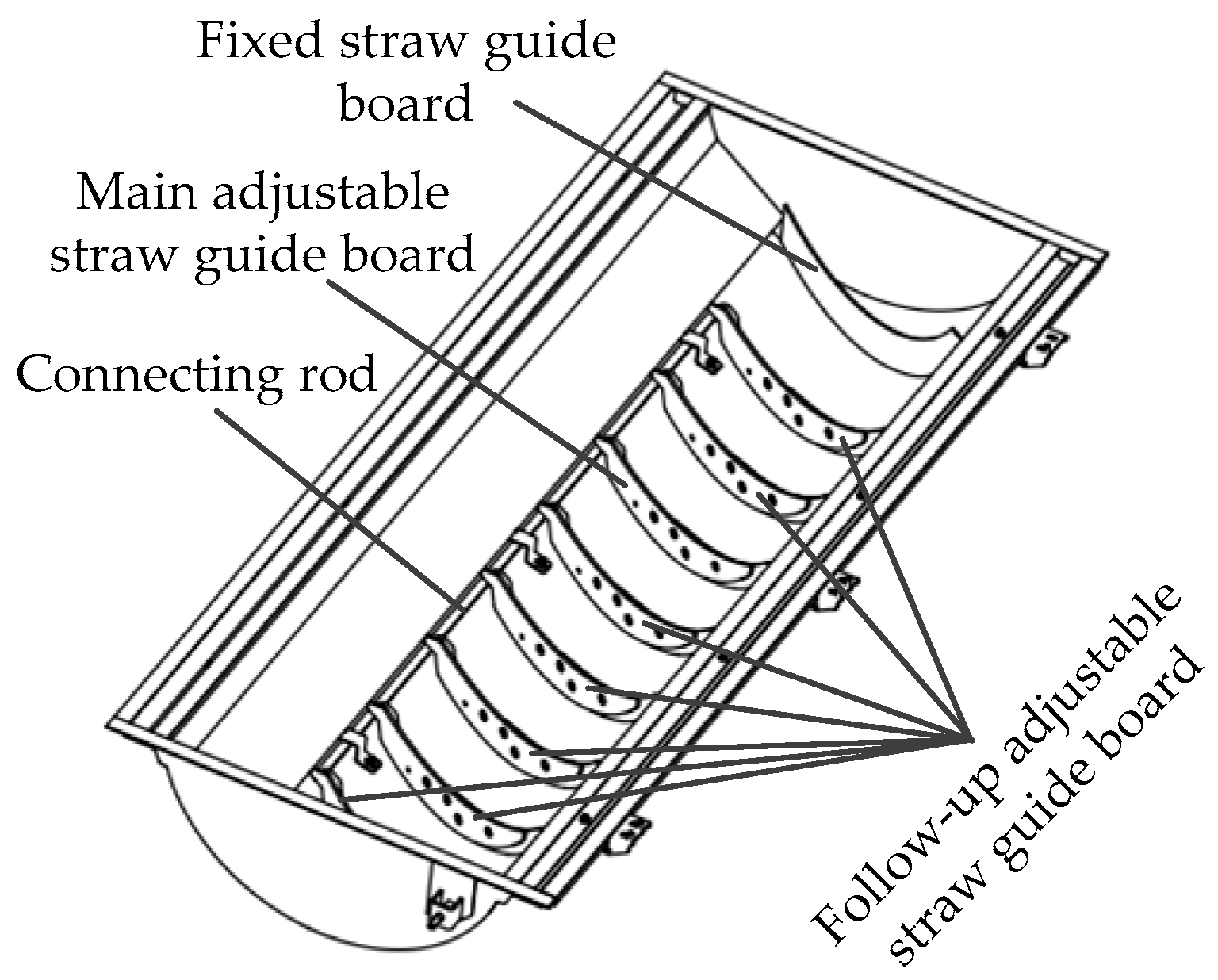
2.2. Threshing Device and Straw Guide Structure
2.3. Analysis of the Mathematical Model of Material Movement
2.3.1. Basic Assumptions
- (a)
- The straw is assumed to be fed continuously and evenly, and the humidity of the straw is assumed consistent.
- (b)
- The straw is assumed to stick to the cover board and to flow continuously and uniformly along the straw guide board, without considering the mutual movement of the straw.
- (c)
- The rotation of the threshing drum can only push the straw, and it does not change the speed of the straw on the straw guide board.
- (d)
- The crop is an inelastic body. When the crop is grasped by the threshing teeth, it is assumed to move at the linear speed of the roller without considering the change process of its acceleration.
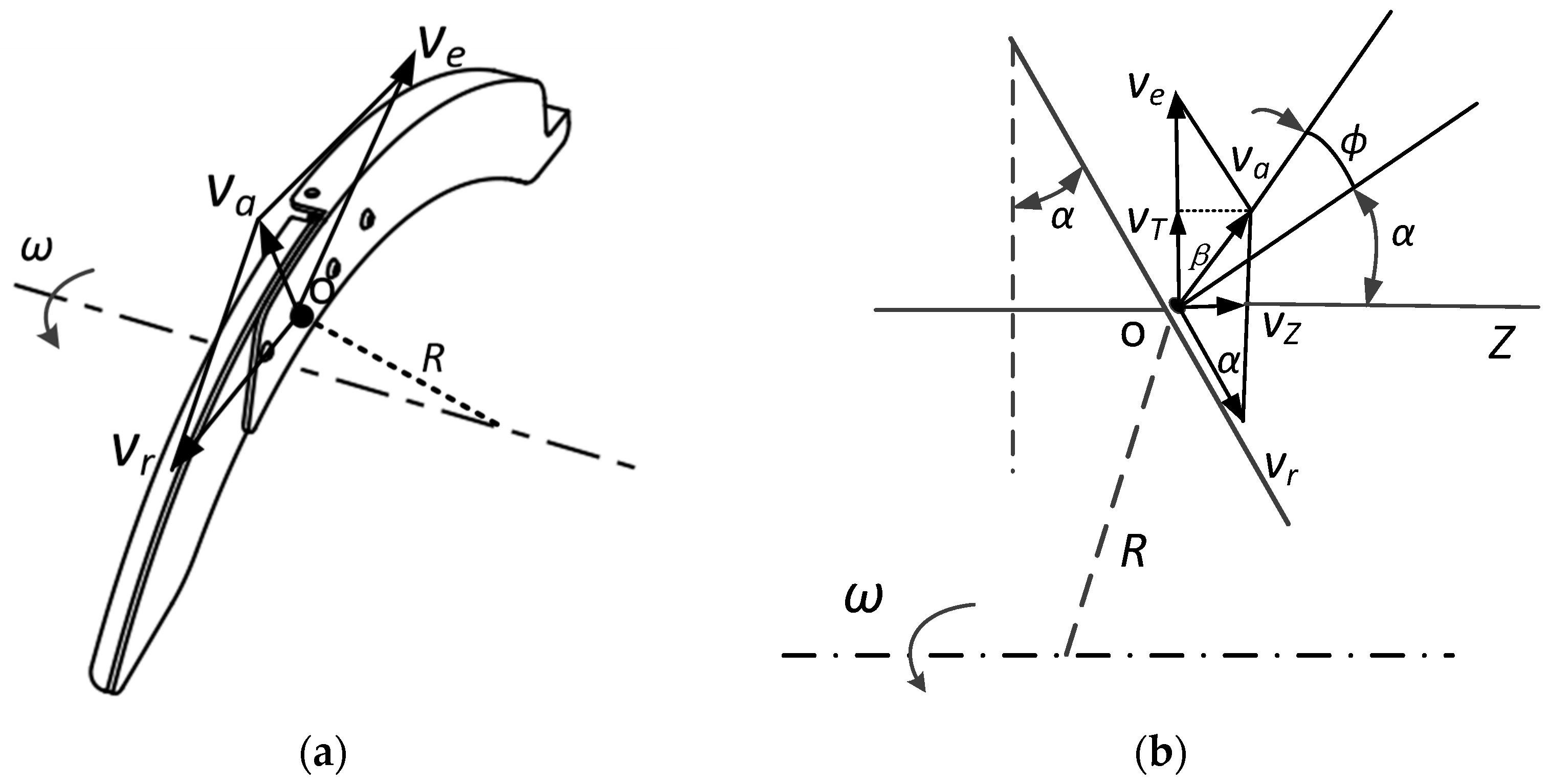
2.3.2. Motion Modeling
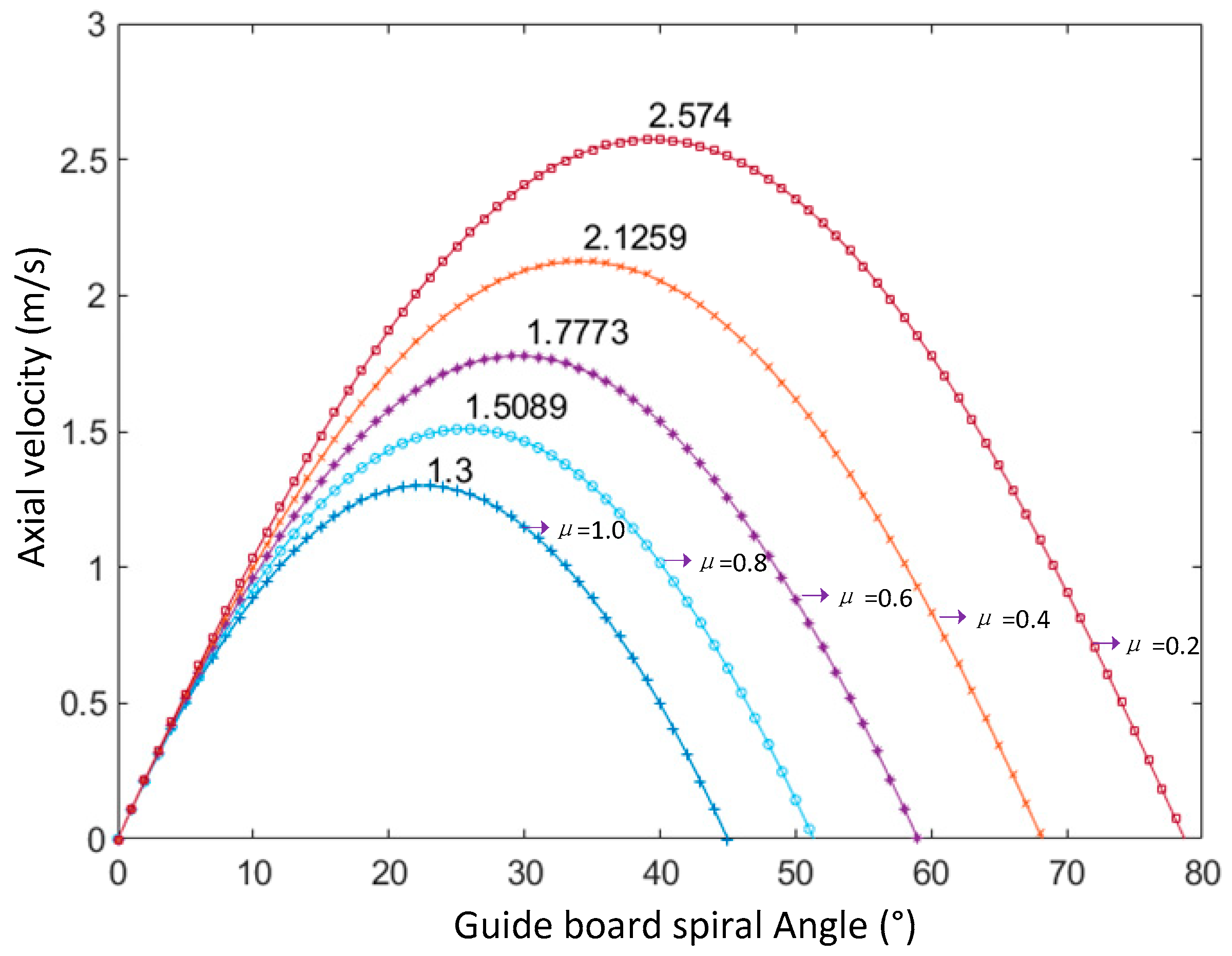
2.3.3. Movement Model Analysis
3. Materials and Methods
3.1. Test Equipment and Materials
3.2. Evaluation Index and Test Design
3.2.1. Evaluation Index
3.2.2. Experimental Design
4. Test Results and Analysis
4.1. Response Surface Test Results
4.2. Significance Analysis
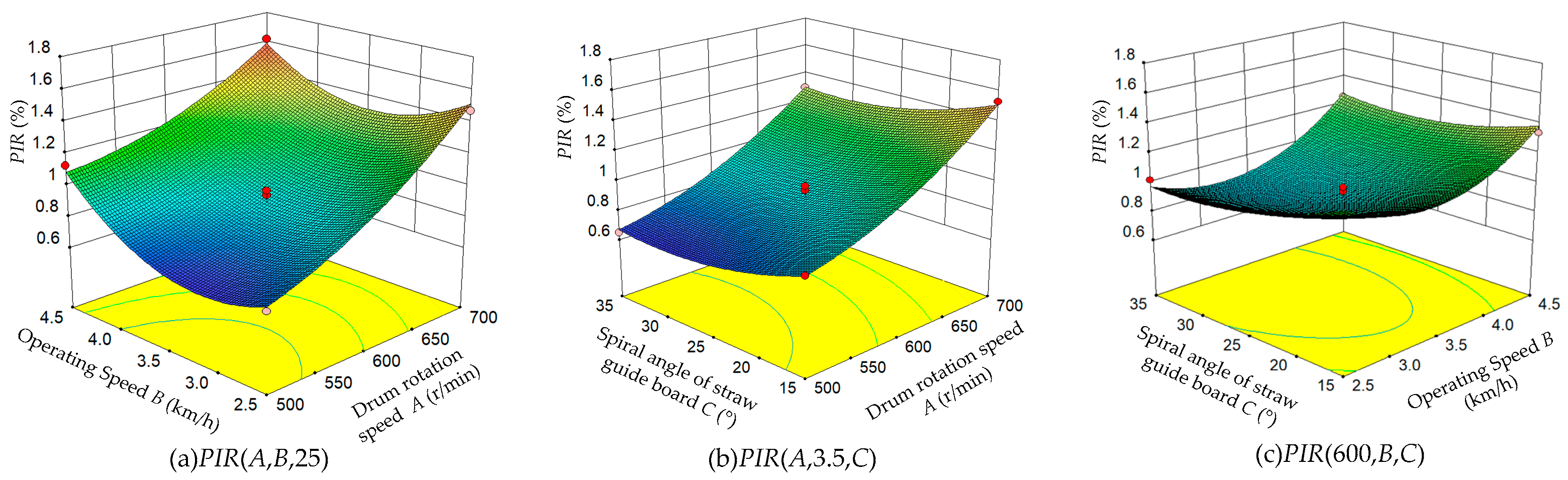
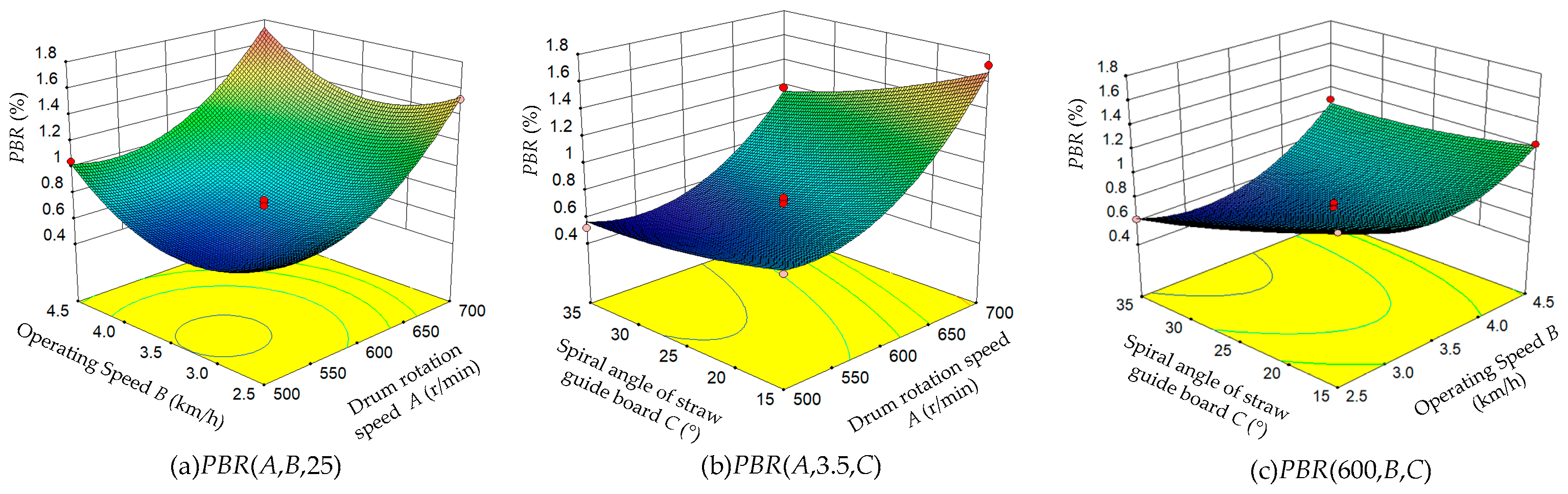
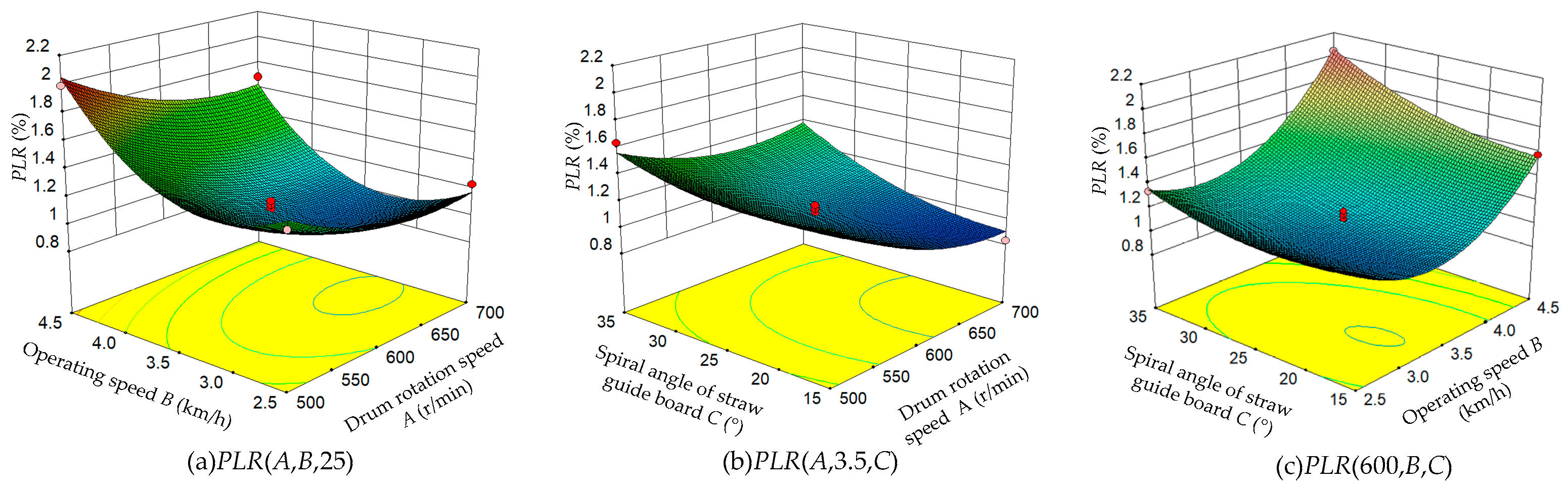
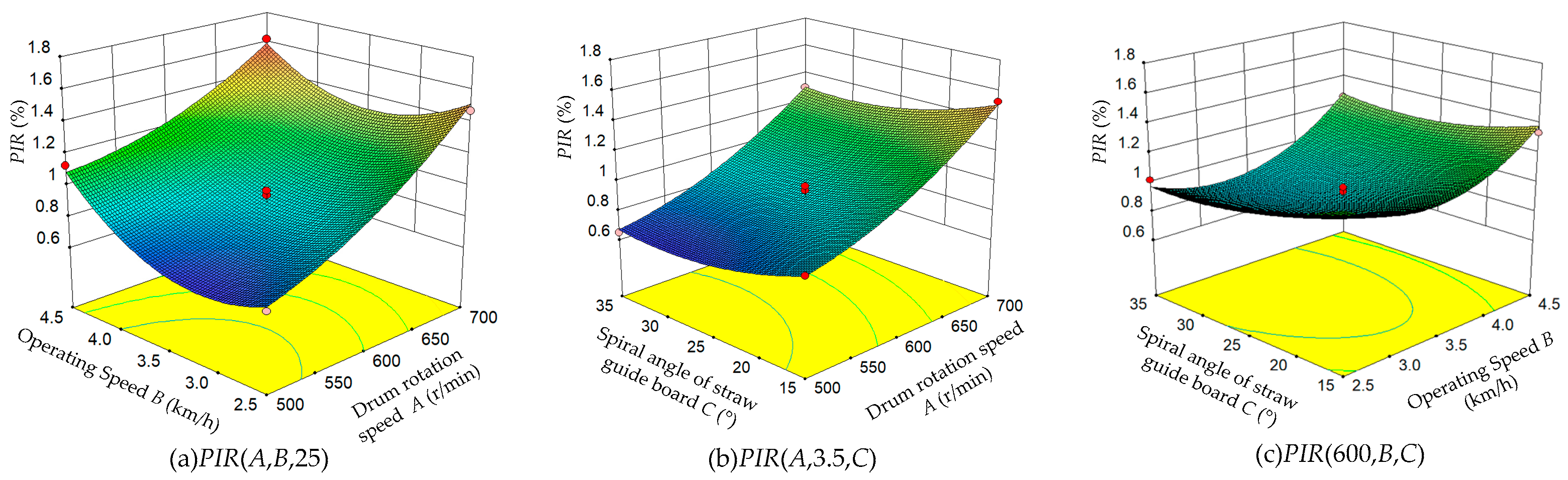
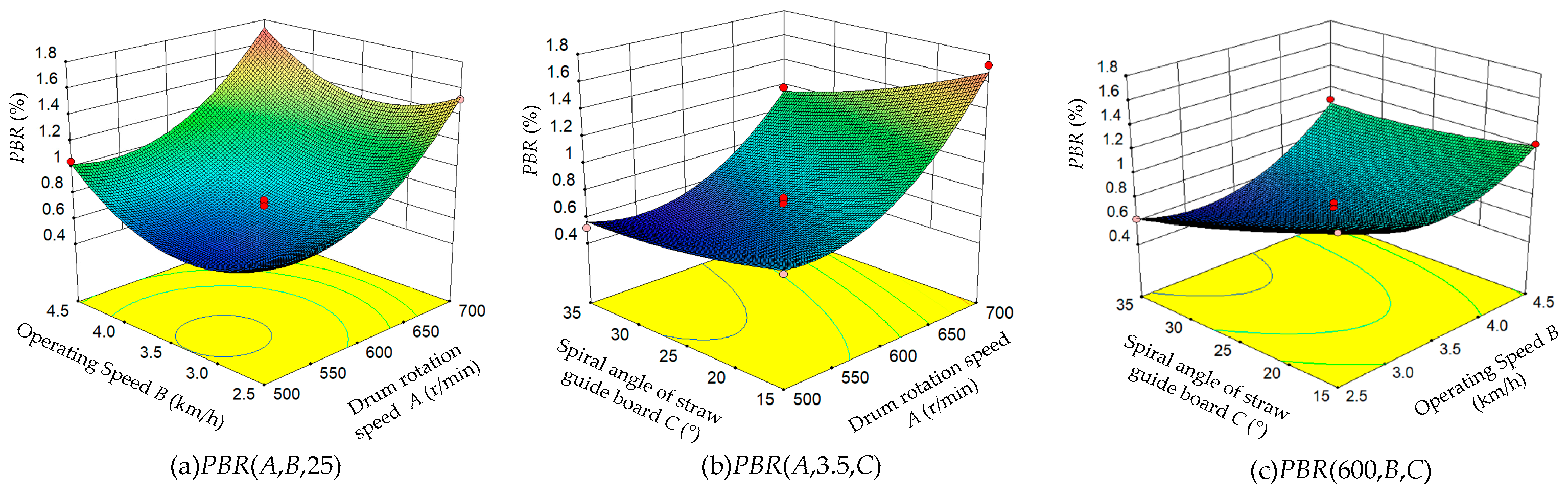
4.3. Response Surface Analysis
4.4. Parameter Optimization
4.5. Validation Tests
5. Discussion
- (1)
- Humidity directly determines the friction coefficient μ between the straw and straw guide board, and it has a great influence on the PLR, PIR, and PBR of the grain combine harvester. Moreover, it is of great research value to determine whether the influence of the rice humidity on the harvesting effect can be eliminated by adjusting the angle of the straw guide board. However, owing to the difficulty in controlling the rice humidity during the grain combine harvester trials, this study did not consider it as an independent factor involved in the field validation trials and optimization. Otherwise, it would have been a four-factor, three-level trial, and there would have been exceedingly many experimental groups, the observation and statistics would have been difficult, and there would have been many problems in the operability and practical application of the field experiments.
- (2)
- The effects of the rice varieties, material characteristics, and agronomy on the threshing equipment were not fully considered in this experiment. To conduct field trials of adjustable straw guide and threshing devices under different crop types, different yield differences, and different operating environments, the next step for the research team will be to explore the effects of different experimental factors on the grain combine harvester PLR, PIR, and PBR.
- (3)
- With the development of science and technology, electromechanical and hydraulic control, sensors, the Internet, machine vision, computer simulation, and other technologies are also widely used in combined harvester research. Advanced technology will inevitably bring complex structures and increase manufacturing costs. High temperature and high humidity operating environments also affect the service life of the equipment. Balancing the ease of operation, stability of use, and economy of purchasing machines will also be a key issue to seriously consider.
6. Conclusions
- (1)
- A straw guide structure with an adjustable spiral angle and its threshing device was designed, and the mathematical model of material movement on the straw guide board was analyzed. The model analysis shows that show that the axial velocity of the straw particle has an inverse parabola relationship with the spiral angle of the straw guide, and the increase in straw moisture and the decrease in spiral angle have the same effect on decreases the axial velocity of straw particles in some situations. This may help improve the threshing effect but may increase grain damage and the content of impurities. Therefore, adjusting the spiral angle of the straw guide board can be considered to cope with the influence of straw humidity on the threshing effect.
- (2)
- Design-Expert was used to design and analyze a three-factor and three-level response surface test for the drum rotation speed, operating speed, and spiral angle of the straw guide board. The results show that the drum rotation speed, operating speed, and spiral angle of the straw guide board have significant effects on the three performance indexes, the PLR, PIR, and PBR. Among them, the order of single factor effect on the PLR is operating speed > drum rotation speed > spiral angle of straw guide board, the order of single factor effect on the PIR is drum rotation speed > operating speed > spiral angle of straw guide board, and the order of single factor effect on the PBR is drum rotation speed > spiral angle of straw guide board > operating speed. For the PLR, the order of influence of the interaction terms is operating speed × spiral angle of straw guide board > drum rotation speed × spiral angle of straw guide board > drum rotation speed × operating speed; for the PIR, the order of influence of the interaction terms is drum rotation speed × operating speed > operating speed × spiral angle of straw guide board > drum rotation speed × spiral angle of straw guide board; and for the PBR, the order of influence of the interaction terms is operating speed × spiral angle of straw guide board > drum rotation speed × spiral angle of straw guide board > drum rotation speed × operating speed.
- (3)
- Using the optimization function of the Design-Expert software, the optimized drum rotation speed (A), operating speed (B), and spiral angle of straw guide board (C) were set at 550 r/min, 3 km/h, and 28°, respectively. The results were as follows: PLR = 1.26%, PIR = 0.73%, and PBR = 0.61%. The absolute error between the experimental and predicted values was very small; however, the verified values of the optimized field experiment were 8.31%, 50.04%, and 60.30% lower than the average values of the original 17 treatments field experiment, respectively. The results show that the response surface test model and the optimized parameters are valid, and the optimized harvester has better operation quality; in particular, the PIR and PBR can be improved greatly.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kang, J.; Wang, X.; Xie, F.; Luo, Y.; Li, Q.; Chen, Z. Design and experiment of symmetrical adjustable concave for soybean combine harvester. Trans. Chin. Soc. Agric. Eng. 2022, 38, 11–22, (In Chinese with English abstract). [Google Scholar]
- Fu, J.; Chen, Z.; Han, L.; Ren, L. Review of grain threshing theory and technology. Int. J. Agric. Biol. Eng. 2018, 11, 12–20. [Google Scholar] [CrossRef]
- Tang, Z.; Li, Y.; Xu, L. Design and optimization for length of longitudinal–flow threshing cylinder of combine harvester. Trans. Chin. Soc. Agric. Eng. 2014, 30, 28–34, (In English with Chinese abstract). [Google Scholar]
- Yang, F.; Yan, C.; Yang, B.; Yi, S.; Jang, N. Simulation and testing of cereal motion in threshing unit of combine harvester with axial feeding. Trans. Chin. Soc. Agric. Mach. 2010, 41, 67–88. [Google Scholar]
- Xu, L.; Li, Y.; Ding, L. Contacting mechanics analysis during impact process between rice and threshing component. Trans. Chin. Soc. Agric. Eng. 2008, 24, 146–149, (In Chinese with English abstract). [Google Scholar]
- Xu, L.; Li, Y.; Li, H. Analysis on factors affecting performance of rice kernel damage during threshing. Trans. Chin. Soc. Agric. Mach. 2008, 39, 55–59. [Google Scholar]
- Xu, L.; Li, Y.; Ma, Z.; Zhan, Z.; Wang, C. Theoretical analysis and finite element simulation of a rice kernel obliquely impacted by a threshing tooth. Biosyst. Eng. 2013, 114, 146–156. [Google Scholar]
- Li, Y.; Li, H.; Xu, L. Comparative experiments on threshing performance between short–rasp–bar tooth cylinder and spike tooth cylinder. Trans. Chin. Soc. Agric. Eng. 2008, 24, 139–142, (In Chinese with English abstract). [Google Scholar]
- Xie, F.; Luo, X.; Lu, X.; Sun, S.; Ren, S.; Tang, C. Threshing principle of flexible pole–teeth roller for paddy rice. Trans. Chin. Soc. Agric. Eng. 2009, 25, 110–114, (In Chinese with English abstract). [Google Scholar]
- Xie, F.; Luo, X.; Su, A.; Wu, M. Contrastive experiment on threshing by using rigid wire–loop, rigid pole tooth and flexible pole tooth. J. Hunan Agric. Univ. (Nat. Sci.) 2005, 31, 648–651. [Google Scholar]
- Tang, Z.; Li, Y.; Li, X.; Xu, T. Structural damage modes for rice stalks undergoing threshing. Biosyst. Eng. 2019, 186, 323–336. [Google Scholar] [CrossRef]
- Bart, L.; Bart, M.; Josse, D.B.; Wouter, S. LiDaR sensing to monitor straw output quality of a combine harvester. Comput. Electron. Agric. 2012, 85, 40–44. [Google Scholar]
- Chen, D.; Wang, S.; Kang, F.; Zhu, Q.; Li, S. Mathematical model of feeding rate and processing loss for combine harvester. Trans. Chin. Soc. Agric. Eng. 2011, 27, 18–21, (In Chinese with English abstract). [Google Scholar]
- Andrews, S.B.; Siebenmorgen, T.J.; Vories, E.D.; Loewer, D.H.; Mauromoustakos, A. Effects of combine operating parameters on harvest loss and quality in rice. Trans. Chin. Soc. Agric. Eng. 1993, 36, 1599–1607. [Google Scholar] [CrossRef]
- Tang, Z.; Li, Y.; Xu, L. Numerical simulation and test analysis of straw movement in threshing and separation unit. Int. Agric. Eng. J. 2014, 23, 35–42. [Google Scholar]
- Su, Z.; Li, Y.; Dong, Y.; Tang, Z.; Liang, Z. Simulation of rice threshing performance with concentric and non–concentric threshing gaps. Biosyst. Eng. 2020, 197, 270–284. [Google Scholar] [CrossRef]
- Qian, Z.; Jin, C.; Ni, Y.; Zhang, D. Modelling threshing using an entropy regularisation approach with frictional contact dynamics and a flexible threshing mechanism. Biosyst. Eng. 2023, 226, 144–154. [Google Scholar] [CrossRef]
- Zhang, Z.; Xie, F.; Tian, L.; Liu, Z.; Looh, G.A.; Wang, X. Design and performance test of rotary grate concave threshing and separating unit of head–feeding combine harvester. Appl. Eng. Agric. 2018, 38, 303–312. [Google Scholar] [CrossRef]
- Yuan, Z. Research on Longitude Axial Flow Threshing and Separating Unit of Rape Combing Harvester; Huazhong Agricultural University: Wuhan, China, 2013. [Google Scholar]
- Xie, G. Design and Experimental Research of Drum–Shaped Rod–Tooth Longitudinal Axial Flow Threshing and Separating Device. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2020. [Google Scholar]
- Yang, F.; Yan, C. Movement analysis of cereal in axial flow threshing roller space. Trans. Chin. Soc. Agric. Eng. 2008, 39, 48–50. [Google Scholar]
- Jin, X.; Zhu, X.; Jin, C.; Cao, G. Research on the power consumption model of grain threshing cylinder. J. Chin. Agric. Mech. 2015, 36, 30–33. [Google Scholar]
- Al-Mahasneh, M.A.; Rababah, T.M. Effect of moisture content on some physical properties of green wheat. J. Food Eng. 2007, 79, 1467–1473. [Google Scholar] [CrossRef]
- Zhang, X. Agricultural Machinery Design Manual; China Agricultural Science and Technology Press: Beijing, China, 2014. [Google Scholar]
- NY/T 498–2013; Agricultural Industry Standard of the P. R. China. Operating Quality for Rice Combine Harvesters. China Agriculture Press: Beijing, China, 2013.
- Qiu, Y. Test Design and Data Processing; University of Science and Technology of China Press: Beijing, China, 2008. [Google Scholar]
- Wang, F.; Ma, S.; Ke, W.; Xing, H.; Bai, J.; Hu, J.; Yang, Y.; Wei, Y. Optimization of base cutter structural parameters for under–the–ground sugarcane base cutting. Appl. Eng. Agric. 2021, 37, 233–242. [Google Scholar] [CrossRef]
- Yang, G.; Chen, Q.; Xia, X.; Chen, J.; Song, Z. Design and optimization of the key components for 4DL–5A faba bean combine harvester. Trans. Chin. Soc. Agric. Eng. 2021, 37, 10–18, (In Chinese with English abstract). [Google Scholar]
- Peng, Y. Design and Experiment of the Longitudinal Axial Threshing Device for Rice; Hunan Agricultural University: Changsha, China, 2016. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Chassis power/(kW) | 65 |
| Machine size (length × width × height)/mm | 5015 × 2560 × 2820 |
| Weight of the whole machine/kg | 2990 |
| Working cut/mm | 2000 |
| Feeding amount/(kg·s−1) | 4 |
| Work efficiency/hm2·h−1 | 0.2~0.5 |
| Factors | Levels | ||
|---|---|---|---|
| −1 | 0 | 1 | |
| Drum rotation speed (A, r/min) | 500 | 600 | 700 |
| Operating speed (B, km/h) | 2.5 | 3.5 | 4.5 |
| Spiral angle of straw guide board (C, °) | 15 | 25 | 35 |
| Serial Number | Experimental Factor | Evaluation Indicators/% | ||||
|---|---|---|---|---|---|---|
| A/(r/min) | B/(km/h) | C/(°) | PLR | PIR | PBR | |
| 1 | 500 | 3.5 | 35 | 1.64 | 0.65 | 0.52 |
| 2 | 700 | 3.5 | 35 | 1.34 | 1.30 | 1.18 |
| 3 | 700 | 2.5 | 25 | 1.23 | 1.47 | 1.52 |
| 4 | 600 | 3.5 | 25 | 1.11 | 0.89 | 0.73 |
| 5 | 600 | 2.5 | 35 | 1.34 | 1.02 | 0.62 |
| 6 | 600 | 4.5 | 35 | 2.04 | 1.25 | 1.10 |
| 7 | 600 | 3.5 | 25 | 1.14 | 0.94 | 0.68 |
| 8 | 500 | 3.5 | 15 | 1.49 | 0.85 | 0.74 |
| 9 | 600 | 4.5 | 15 | 1.58 | 1.34 | 1.23 |
| 10 | 600 | 3.5 | 25 | 1.03 | 0.97 | 0.70 |
| 11 | 600 | 3.5 | 25 | 1.08 | 0.86 | 0.63 |
| 12 | 500 | 2.5 | 25 | 1.42 | 0.70 | 0.82 |
| 13 | 600 | 2.5 | 15 | 1.26 | 1.27 | 1.16 |
| 14 | 500 | 4.5 | 25 | 1.99 | 1.13 | 1.05 |
| 15 | 600 | 3.5 | 25 | 0.99 | 0.83 | 0.75 |
| 16 | 700 | 3.5 | 15 | 0.83 | 1.53 | 1.72 |
| 17 | 700 | 4.5 | 25 | 1.69 | 1.62 | 1.68 |
| Indicator | Source | Sum of Squares | df | Mean Squares | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|---|
| PLR | Model | 1.81 | 9 | 0.2 | 32.06 | <0.0001 | ** |
| A | 0.26 | 1 | 0.26 | 41.79 | 0.0003 | ** | |
| B | 0.53 | 1 | 0.53 | 83.52 | <0.0001 | ** | |
| C | 0.18 | 1 | 0.18 | 28.62 | 0.0011 | ** | |
| AB | 3.03 × 10−3 | 1 | 3.03 × 10−3 | 0.48 | 0.5103 | ||
| AC | 0.032 | 1 | 0.032 | 5.15 | 0.0575 | ||
| BC | 0.036 | 1 | 0.036 | 5.74 | 0.0478 | * | |
| A2 | 0.084 | 1 | 0.084 | 13.36 | 0.0081 | ** | |
| B2 | 0.58 | 1 | 0.58 | 92.27 | <0.0001 | ** | |
| C2 | 0.054 | 1 | 0.054 | 8.66 | 0.0216 | * | |
| Residual | 0.044 | 7 | 6.29 × 10−3 | ||||
| Lack of Fit | 0.029 | 3 | 9.81 × 10−3 | 2.69 | 0.182 | ||
| Pure Error | 0.015 | 4 | 3.65 × 10−3 | ||||
| Cor Total | 1.86 | 16 | |||||
| R2 | 0.9763 | ||||||
| Adj R2 | 0.9459 | ||||||
| PIR | Model | 1.37 | 9 | 0.15 | 43.35 | <0.0001 | ** |
| A | 0.84 | 1 | 0.84 | 239.53 | <0.0001 | ** | |
| B | 0.097 | 1 | 0.097 | 27.65 | 0.0012 | ** | |
| C | 0.074 | 1 | 0.074 | 21.17 | 0.0025 | ** | |
| AB | 0.02 | 1 | 0.02 | 5.60 | 0.0499 | * | |
| AC | 2.25 × 10−4 | 1 | 2.25 × 10−4 | 0.064 | 0.8072 | ||
| BC | 6.4 × 10−3 | 1 | 6.4 × 10−3 | 1.83 | 0.2184 | ||
| A2 | 0.04 | 1 | 0.04 | 11.38 | 0.0119 | * | |
| B2 | 0.23 | 1 | 0.23 | 66.28 | <0.0001 | ** | |
| C2 | 0.032 | 1 | 0.032 | 9.16 | 0.0192 | * | |
| Residual | 0.025 | 7 | 3.501 × 10−3 | ||||
| Lack of Fit | 0.011 | 3 | 3.808 × 10−3 | 1.16 | 0.4268 | ||
| Pure Error | 0.013 | 4 | 3.27 × 10−3 | ||||
| Cor Total | 1.39 | 16 | |||||
| R2 | 0.9824 | ||||||
| Adj R2 | 0.9597 | ||||||
| PBR | Model | 2.29 | 9 | 0.25 | 71.44 | <0.0001 | ** |
| A | 1.10 | 1 | 1.10 | 309.91 | <0.0001 | ** | |
| B | 0.11 | 1 | 0.11 | 31.04 | 0.0008 | ** | |
| C | 0.26 | 1 | 0.26 | 71.84 | <0.0001 | ** | |
| AB | 1.225 × 10−3 | 1 | 1.225 × 10−3 | 0.34 | 0.5758 | ||
| AC | 0.026 | 1 | 0.026 | 7.20 | 0.0314 | * | |
| BC | 0.042 | 1 | 0.042 | 11.81 | 0.0109 | * | |
| A2 | 0.36 | 1 | 0.36 | 100.22 | <0.0001 | ** | |
| B2 | 0.33 | 1 | 0.33 | 91.79 | <0.0001 | ** | |
| C2 | 0.011 | 1 | 0.011 | 3.08 | 0.1228 | ||
| Residual | 0.025 | 7 | 3.558 × 10−3 | ||||
| Lack of Fit | 0.016 | 3 | 5.108 × 10−3 | 1.43 | 0.1993 | ||
| Pure Error | 8.68 × 10−3 | 4 | 2.17 × 10−3 | ||||
| Cor Total | 2.31 | 16 | |||||
| R2 | 0.9892 | ||||||
| Adj R2 | 0.9754 |
| Name | Constraints | Solutions | ||||||
|---|---|---|---|---|---|---|---|---|
| Goal | Lower Limit | Upper Limit | Lower Weight | Upper Weight | Importance | Optimized Results | Parameter Adjustment | |
| A (r/min) | within range | 500 | 700 | 1 | 1 | 3 | 551.29 | 550 |
| B (km/h) | within range | 2.5 | 4.5 | 1 | 1 | 3 | 3.14 | 3 |
| C (°) | within range | 10 | 50 | 1 | 1 | 3 | 28.22 | 28 |
| PLR (%) | minimize | 0 | 2 | 1 | 1 | 3 | 1.18 | 1.18 |
| PIR (%) | minimize | 0 | 1.60 | 1 | 1 | 3 | 0.72 | 0.72 |
| PBR (%) | minimize | 0 | 1.72 | 1 | 1 | 3 | 0.53 | 0.54 |
| Indicator | No. | Predicted Value | Validated Value | Relative Error | Absolute Error |
|---|---|---|---|---|---|
| PLR (%) | 1 | 1.18 | 1.28 | 8.47 | 0.10 |
| 2 | 1.23 | 4.24 | 0.05 | ||
| 3 | 1.27 | 7.63 | 0.09 | ||
| mean | 1.26 | 6.78 | 0.08 | ||
| PIR (%) | 1 | 0.72 | 0.71 | 1.39 | −0.01 |
| 2 | 0.70 | 2.78 | −0.02 | ||
| 3 | 0.75 | 4.17 | 0.03 | ||
| mean | 0.73 | 1.39 | 0.01 | ||
| PBR (%) | 1 | 0.54 | 0.63 | 16.67 | 0.09 |
| 2 | 0.61 | 12.96 | 0.07 | ||
| 3 | 0.59 | 9.26 | 0.05 | ||
| mean | 0.61 | 12.96 | 0.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Chen, D.; Xu, X.; Wu, Y. Experimental Design and Validation of an Adjustable Straw Guide Structure for a Grain Combine Harvester Thresher Based on a Material Movement Model. Appl. Sci. 2023, 13, 8476. https://doi.org/10.3390/app13148476
Wu L, Chen D, Xu X, Wu Y. Experimental Design and Validation of an Adjustable Straw Guide Structure for a Grain Combine Harvester Thresher Based on a Material Movement Model. Applied Sciences. 2023; 13(14):8476. https://doi.org/10.3390/app13148476
Chicago/Turabian StyleWu, Luofa, Daogen Chen, Xieqing Xu, and Yanqi Wu. 2023. "Experimental Design and Validation of an Adjustable Straw Guide Structure for a Grain Combine Harvester Thresher Based on a Material Movement Model" Applied Sciences 13, no. 14: 8476. https://doi.org/10.3390/app13148476
APA StyleWu, L., Chen, D., Xu, X., & Wu, Y. (2023). Experimental Design and Validation of an Adjustable Straw Guide Structure for a Grain Combine Harvester Thresher Based on a Material Movement Model. Applied Sciences, 13(14), 8476. https://doi.org/10.3390/app13148476