Abstract
As an emerging technology, reconfigurable intelligent surface (RIS) has attracted increasing attention due to the ability to configure the wireless propagation environment. Parallel multiple-input multiple-output (MIMO) visible light communication (VLC) is suitable for some scenarios, e.g., multi-user time-division multiple access for indoor VLCs. The application of RIS in VLC is a promising trend in the future, and this paper investigates the employment of RIS in a parallel MIMO VLC system with asymptotic capacity maximization. To this end, the RIS-aided parallel MIMO VLC channel model is derived in this paper under the point source assumption, and then, as for the non-convex optimization problem, instead of searching exhaustively for the optimal solution, we propose a low-complexity near-optimal relaxing particle swarm optimization (RPSO) algorithm to optimize the RIS parameters. Meanwhile, we discover that the convex relaxation is an effective method for the optimization problems. Finally, numerical results indicate the effectiveness of the proposed design of RIS, and meanwhile, the asymptotic capacity can be improved to a great degree by adopting RIS in the parallel MIMO VLC system.
1. Introduction
Recently, visible light communications (VLCs) have become promising technologies to meet the demand for high-speed communications [1]. Specifically, as for the limitations faced by radio frequency (RF) communication (e.g., the spectrum scarcity), VLC can be regarded as a complementary technology to provide a mass of resources because of the nearly 400 Thz spectrum [2]. Meanwhile, VLC is considered as a green and environmental communication technology for future sixth generation (6G) communication due to the capability of achieving communication based on an illumination system.
However, the communication performance of VLC can be affected by some factors (e.g., distance, blockage, and the alignment of transmitter–receiver) easily. Consequently, multiple-input multiple-output (MIMO) technology is used to mitigate these effects. The parallel MIMO VLC channel is a field worth studying owing to the reason that this model can be applied to some cases (e.g., the transmitters and receivers are properly spaced so that the cross-talk between signals from different transmitters seldom occurs [3], the wave-division multiplexing (WDM) system [4,5,6], multi-user time-division multiple-access (TDMA) system [7], etc.). The work in [8] characterizes the capacity of parallel MIMO VLC channels. The asymptotic capacity can usually represent a criterion to evaluate the communication performance, and consequently, we adopt it as the performance indicator in this paper.
Nevertheless, even with the MIMO technology, the transmission in VLC systems may still be blocked by the obstructions between the transmitter and receiver on account of the high dependence on the transmission of the line-of-sight (LoS) links [1]. This is due to the fact that the modulation mode adopted in VLC popularly is intensity-modulation and direct-detection (IM/DD). The reconfigurable intelligent surface (RIS) can be considered as an efficient method to help VLC overcome the shortcoming. As an emerging technology, RIS can change the wireless propagation environment by modifying the parameters of a surface composed of synthetic meta-atoms. This promising technology has been used in RF communication to enhance the performance in recent years [9,10,11,12]. Based on the character changing wireless propagation environment adaptively, combined with the shortcomings of VLC, a lot of study has been carried out on RIS in VLC to improve the communication performance of VLC systems [13,14,15,16,17,18,19,20,21]. As of writing, there is very little research on RIS-aided MIMO-VLC systems, and the work in this area with high relevance can be found in [20]. The aim of paper [20] is to minimize the mean square error (MSE) of demodulated signals at the receiver. In addition, the model in this paper is focused on the general MIMO VLC systems. In consideration of the advantages of RIS and the challenge faced by MIMO technology, combined with the research value of parallel MIMO VLC channel, this paper investigates the application of RIS in parallel MIMO VLC channel and formulate an optimization problem with asymptotic capacity maximization to configure the RIS parameters.
Commonly, the parameters of RIS in RF communications refer to phase and amplitude coefficients. However, owing to the difference between RF communications and VLC, the main parameters of RIS in VLC usually are the orientation angles of mirrors in mirror array-based VLC RIS and phase information in meta surface-based VLC RIS. Furthermore, based on the work in [22], a mirror array-based VLC RIS is superior to a meta surface-based VLC RIS, and consequently, VLC RIS based on a mirror array is adopted in the remainder of the paper. The current research on VLC RIS is related to optimizing the orientations of mirrors to achieve the goal of communication performance enhancement. Motivated by the content as mentioned above, we consider the application of RIS in parallel MIMO VLC channel and propose an effective design to configure RIS. As of writing, there is no literature on the asymptotic capacity of RIS-aided parallel MIMO VLC systems. We make the first attempt and obtain a proper design of RIS in this scenario (parallel MIMO VLC).
We organize the remainder of this paper in the following order: Section 2 provides the RIS-aided parallel MIMO VLC system model. The optimization problem is formulated, and meanwhile, the proposed algorithm is introduced accordingly in Section 3. In Section 4, simulation results indicate the effectiveness of the proposed solution, and the degree of performance improvement produced by RIS in parallel MIMO VLC is displayed in the simulation charts. Finally, the paper is concluded in Section 5.
2. Channel Model
A typical RIS-aided parallel MIMO VLC system is considered in the paper. For a parallel MIMO VLC channel, the number of transmitters is the same as the receivers. As shown in Figure 1, we assume that there are N transmitters, N receivers, and K RIS elements in this paper. Normally, the number of RIS elements is much larger than the number of the transmitters in RIS-aided VLC systems (i.e., ). The Cartesian coordinates have been considered in the figure. Owing to the features of the parallel MIMO VLC channel, a point-to-point (P2P) channel is formed by matching the transmitters and the receivers one by one. The LoS channel and the nonline-of-sight (NLoS) channel are displayed in the figure. The model of RIS-aided parallel MIMO VLC is first discussed in our work and derived according to the Lambertian model. We will introduce the details of this model in this section.
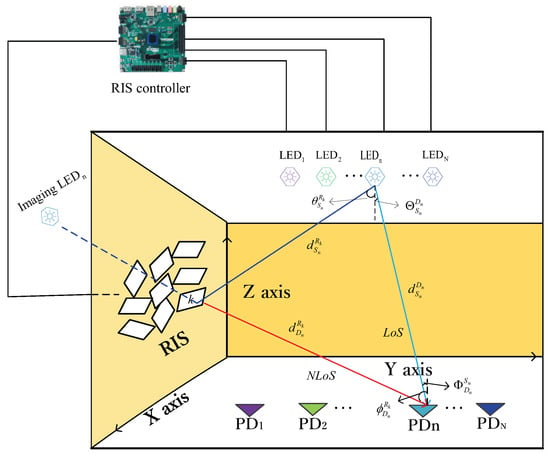
Figure 1.
A typical RIS-aided parallel MIMO VLC system.
Before introducing the channel model further, we need to specify the geometric parameters determining the channel gain. It is supposed that the coordinates of the light-emitting diode (LED), the photodiode (PD), and the RIS element are , and . The distance between the transmitter and the receiver is denoted by . Meanwhile, and denote the distance of the LED to the RIS element and the RIS element to the PD, respectively. All of the distance calculated by the distance formula between two points. Without loss of generality, the normal vector of the transmitter is assumed to be downward towards the floor, and meanwhile, the normal vector of the receiver is upward towards the ceiling. Consequently, the angle of incidence and irradiance of the LoS channel are expressed as
The angle of the irradiance of the NLoS link correlated with the RIS element and the LED is given by
The angle of the incidence of the NLoS channel connected to the PD, and the RIS element is formulated as
All the notations introduced above are labeled in Figure 1.
2.1. The Channel Gain of LoS Links
The Lambertian model can usually characterize the LoS link in VLC [23], and consequently, the LoS channel gain from the LED to the PD is given by
where denotes the physical area of the PD, m is the Lambertian index determined by the LED half-power semiangle and calculated by . Moreover, represents the gain of the optical filter, and denotes the gain of the optical concentrator associated with the field-of-view (FoV) . The relationship between the optical concentrator gain and the FoV is formulated as [23]
where a denotes the refractive index.
2.2. The Channel Gain of NLoS Links
The NLoS channel contains two parts: the specular reflections produced by RIS and the diffuse reflections from the walls, ceiling, floor, etc. According to [24], the diffuse reflections can be ignored due to low responses. Meanwhile, we can obtain that high-order reflections have little influence on the propagation in VLC on account of the research in [25]. Consequently, we consider the NLoS channel as the one-order specular reflections caused by RIS in our work. The work in [13,17,19] considers the RIS-aided VLC NLoS channel model as an additive form specifically according to the derivation in [22]. However, given the high spatial resolution of the specular reflection links, we model the channel model as follows in order to extract the controllable variables from complex mirror rotation angles and focus on the essential information of the assignment scheme. The NLoS channel gain motivated by the work in [16] from the LED to the PD via the RIS element can be approximatively regarded as an imaging LED’s Lambertian model characterized by
where represents the reflection coefficient, and for simplicity, we assume the coefficients for different RIS elements are the same in our work. Inspired by the work in [15], we assume that the signal from one LED can be only reflected by one RIS element, and the reflected signal will arrive at the corresponding PD matched with the LED. This process can be realized by the adaptively adjustment of RIS after inputting an assignment matrix on the VLC controller. We assume that denotes the assignment matrix, the row of is , where denotes the LED chooses the RIS element as the reflector to transmit the signals to the PD, the vector represents the channel gain from the LED to each RIS element to the PD. Consequently, the NLoS channel gain from the LED to the PD is given by
We assume that , , according to the above definition, we can derive that
where , and consequently,
2.3. The Channel Matrix of the RIS-Aided Parallel MIMO VLC System
The channel gain from the LED to the PD is given by
We assume the LoS channel matrix is denoted by , and consequently, the channel matrix of the RIS-aided parallel MIMO VLC system is
Meanwhile, the elements in the assignment matrix need to satisfy some constraints given by
The constraint in (12) comes from the definition of , and represents that the RIS element is assigned to the LED and PD. The constraint in (13) is because each RIS element can be assigned to one LED at most, and the constraint in (14) guarantees that each LED will choose one RIS element to complete the NLoS channel.
3. Problem Formulation and Proposed Solution
In this section, we regard the asymptotic capacity proposed in [8] as the objection and formulate an optimization problem with the assignment matrix as the independent variable to configure the RIS. As for the optimization problem, we propose the relaxing particle swarm optimization (RPSO) algorithm to solve the optimization problem.
3.1. Problem Formulation
For the RIS-aided parallel MIMO VLC system, the asymptotic capacity in high signal-to-noise ratio (SNR) with peak-constrained inputs is derived as [8]
where represents the peak constraint on the input signal due to the IM/DD modulated scheme, e is the natural logarithm, is the channel gain of the RIS-aided parallel MIMO VLC system (containing the LoS and NLoS channel gain), and is the assignment matrix and influences the value of . Consequently, the primary optimization problem is formulated as
Considering that the assignment matrix can only have an influence on the channel gain, we can transform the problem (16) into a more tractable form, which is characterized by
Theorem 1.
The equivalence problem P1 is equivalent to the primary problem P.
Proof.
The optimization of RIS can influence the channel gain in (15), and consequently, can be ignored in our process of optimization. Meanwhile, we can obtain the relationship that . Consequently, the objective is transformed into maximizing . The constraint in (13) is equivalent to the constraint since the value of can only be 0 or 1 under the constraint of (12). This completes the proof. □
3.2. The Relaxed Result for Asymptotic Capacity Maximization
The problem in (17) is an integer programming problem which has been proved to be non-deterministic polynomial-time (NP) hard. For the non-convex optimization problem, it is unpractical to solve it by applying the exhaustive search method due to the intractability of the algorithm. Consequently, we proposed a low-complexity near-optimal algorithm to solve the problem. Firstly, we need to transform the primary problem into a tractable form by relaxing the constraints. It can be observed that the primary problem is able to be relaxed as
It is evident that the transformed feasible region is a convex set. It is necessary to calculate the Hessian matrix to analyze the convexity of the relaxed problem. The second-order partial derivative is given by
Consequently, the Hessian matrix is a negative semidefinite matrix, and meanwhile, the transformed problem (18) is a convex problem. There are many convex optimization tools able to be applied to solving the problem [26]. The CVX toolbox in MATLAB is used in our simulations. According to the relaxed results calculated by the convex optimization algorithm, we select the maximum value in each row of as the final assignment selection (the value which is closest to 1) to satisfy the constraints in (16). We assume that the denotes the result modified from the relaxed result calculated by the convex optimization tools.
3.3. The RPSO Algorithm
However, may not be the optimal solution to the problem (16) according to the final modified operation in Section 3.2, and consequently, we need to search for a meta-heuristic algorithm to calculate the global optimization solution while satisfying the constraints. Motivated by the work in [17], we adopt the result as one of the initial values of the heuristic algorithm to intervene in the computational process. The purpose of this operation is to accelerate the rate of convergence and satisfy the constraints simultaneously.
The particle swarm optimization (PSO) algorithm is an intelligent algorithm that can help us search for the global optimization of the problems mentioned above by simulating the behavior of biological populations [27]. Normally, the initial value of each particle is randomly chosen to guarantee that all the possible searching regions can be explored. In our simulations, we choose the solution as one of the initialization to ensure a faster rate of convergence. In our practical scenarios, the location of each particle indicates a possible assignment scheme of RIS (i.e., a kind of ), and the fitness of each particle is characterized by the objective function in (17) to evaluate the optimality of the possible solution. The process of searching for the maximum fitness for each particle is achieved by updating its velocity and position according to the principle characterized by
where and represent the velocity and position of the particle at the iteration, respectively. Meanwhile, and are the historically optimal position of the particle and the entire particle swarm at the iteration, respectively. m is the size of the particle swarm, T represents the maximum number of iterations. Furthermore, denotes the inertia weight characterizing the ability to balance the globality and convergence rate, and represent the learning factors assessing the ability to exchange information in the particles, and and are the random numbers uniformly distributed in . We modify the PSO algorithm by setting the initial value of the first particle as . In addition, other particles’ initial positions are selected randomly from feasible values satisfying the constraints in (18). Meanwhile, the constraint on velocity needs to be imposed to prevent missing the ideal solution on account of the excessive velocity or encountering delays in achieving the final solution caused by the stagnant updating velocity for particles. Consequently, the velocity of the updating process meets , where is the maximum updating velocity set for each particle. As for the first iteration (i.e., ), the initialization for the particles’ positions and velocities can be expressed as
where and denote the initial position and velocity for the particle at the first iteration, represents the random function which can select a random matrix from the feasible value satisfying the constraints in (18), and meanwhile, denotes the random function which selects a random number from . We call this modified PSO algorithm as the RPSO algorithm. Algorithm 1 displays the pseudocode of the RPSO algorithm.
| Algorithm 1 The RPSO algorithm for Asymptotic Capacity Maximization |
Input: Size of the particle swarm m; Maximum number of iterations T; Output: The historically optimal position of the entire particle swarm ; The historically optimal fitness of the particle swarm;
|
3.4. Complexity Analysis
Without regarding the complexity of the convex optimization tools, the complexity of Algorithm 1 is analyzed in this section. The process of initialization needs operations, where m is the size of the particle swarm and is the number of elements in the assignment matrix . The process of generating the initial particle and the initial velocity need the same operations . We need m operations to calculate the historically optimal fitness for every particle, and meanwhile, we need the same number of operations to select the historically optimal location of the particle swarm. The process of updating the position and velocity of the particle swarm needs operations at most, where T represents the maximum number of iterations. It is required to cost and operations at most to calculate the historically optimal fitness for every particle and select the histrionically optimal position of the particle swarm according to the updated particles, respectively. Hence, the computational complexity in the worst-case scenario of the whole updating process is . Consequently, the integral computational complexity of Algorithm 1 is .
4. Simulation Results
In this section, we set two transmitters and two receivers as an example to investigate the effectiveness of the algorithm proposed above. Without loss of generality, the locations of the LEDs are randomly placed. The size of the room is 5 m × 5 m × 3 m. For simplicity, we assume the variance of the noise corresponding with the system is , and the channel gain can be absorbed by normalization. The locations of the PDs are randomly chosen from an array satisfied with a uniform distribution in the floor to guarantee the generality. The number of RIS elements is a variable in our simulations, and meanwhile, it is much larger than the number of transmitters to guarantee that each transmitter is able to choose one RIS element to construct the NLoS channel. All the parameters are summarized in Table 1.

Table 1.
Numerical parameters.
4.1. Convergence Analysis
Figure 2 shows the convergence rate of Algorithm 1 and a performance comparison of the proposed method with that of the exhaustive search method. It is observed that the global optimal solution calculated by the exhaustive search method is close to the solution obtained by the proposed algorithm. However, the exhaustive search method is highly intractable and cannot be used in practice. The proposed algorithm could achieve the near-optimal solution within a finite number of iterations. The computational complexity of Algorithm 1 is reduced a lot compared with the exhaustive search method, and the calculated results from the proposed algorithm are satisfactory.
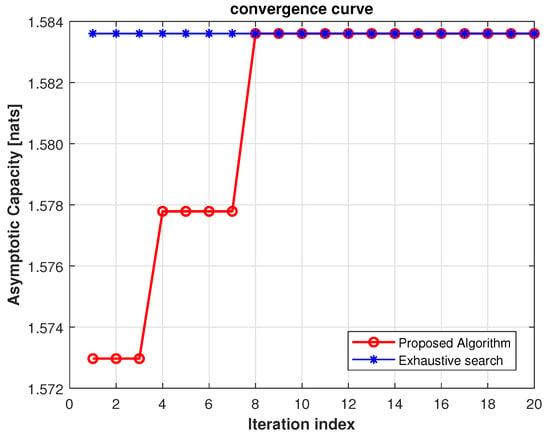
Figure 2.
Convergence analysis for Algorithm 1, .
4.2. Influence of Assignment Schemes on Asymptotic Capacity
Figure 3 shows the performance of asymptotic capacity versus SNR with different assignment schemes when the number of RIS elements K are constant. We assume and focus on the influence of assignment schemes in asymptotic capacity. In the figure, “no-RIS” means that the channel is organized by LoS links only, and hence, the asymptotic capacity results are contributed by the LoS transmission only. “RIS-aided” represents that the transmission consists of the LoS channel and the NLoS channel. The proposed algorithm indicates the RPSO algorithm proposed in this paper, and the distance greedy3 implies that the assignment matrix is determined based on the minimum sum of the distances (LED-RIS-PD), while the distance greedy2 depends on the minimum distance between the LED and RIS, and furthermore, the distance greedy1 is on the basis of the minimum distance between the RIS and PD, the “Relaxing results” indicate the results modified from the results calculated by the convex optimization tools according to the relaxing problem, and “Random selection” means that a random matrix satisfied with the definition of the assignment matrix is applied to the RIS-aided parallel MIMO system (i.e., each RIS element is assigned to the LED randomly) to determine the scheme of service for RIS.
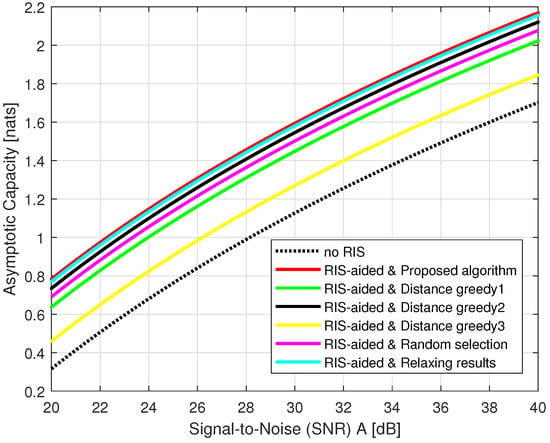
Figure 3.
Asymptotic capacity versus different SNR with different assignment schemes, .
For comparing the performance among the above-mentioned schemes, simulations have been carried out under different SNR. We can obtain that the application of RIS can enhance the asymptotic capacity for a parallel MIMO VLC system by comparing “no-RIS” with other baselines. In addition, we can know that the RPSO algorithm and the convex relaxation are effective methods to solve the assignment problems for the RIS-aided parallel MIMO VLC system. Though the complexity of the RPSO algorithm is reduced significantly compared with the exhaustive search algorithm, we think the convex relaxation is a more reasonable method to solve the problems. The capacity results calculated by the convex relaxation in Figure 3 are close to the optimal results while the computation complexity is much lower than the heuristic algorithm, and meanwhile, the conflict that the relaxed results may have interference in the primary constraints can be dealt with by choosing the solution closet to the relaxed results. However, the calculated results from the RPSO algorithm are more precise, and the complexity can be reduced significantly after determining the proper initial value or inertia weight. The evaluation of the algorithms will be our research direction in the future.
4.3. Influence of the Number of RIS Units on Asymptotic Capacity
To investigate the influence of the number of RIS units on the asymptotic capacity, we set several simulations by changing the number of RIS units while retaining the other parameters unchanged. The RIS units cannot be too small due to the fact that the system model of indoor parallel MIMO VLC is derived based on the point source hypothesis [22]. Consequently, we assume that the area of the RIS unit is , and for fairness, the center point of RIS is constant when the number of RIS units increases (i.e., the RIS units are deployed on the wall evenly centered on the center point we set).
Figure 4 shows the influence of the number of RIS units on the asymptotic capacity with the assignment scheme derived by the proposed algorithm. From the figure, we can obtain that the growth rate of the asymptotic capacity improves steadily with the increase of the number of RIS units. However, the slope of the growth rate decreases with the increase of the number of RIS units. This is due to the marginal benefit and the constraints on the RIS design. This reminds us that the RIS needs to be further developed in the future to overcome the technical bottleneck (e.g., much smaller physical area of the RIS units). Meanwhile, it is observed that the growth rate decreases when the SNR increases. This is because a higher SNR means a larger primal asymptotic capacity, and hence the growth rate decreases with the increase of the SNR.
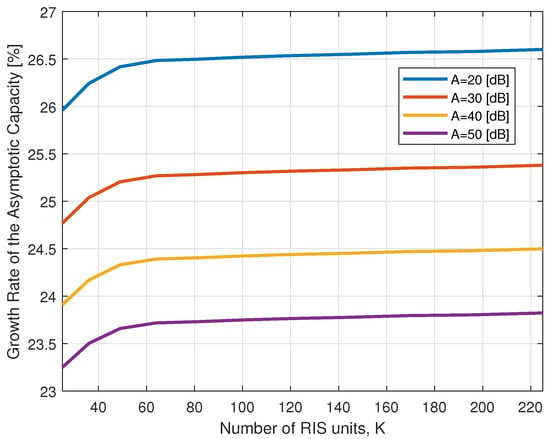
Figure 4.
Asymptotic capacity versus the number of RIS with the optimal assignment scheme.
5. Conclusions
In this paper, we propose a RIS-aided parallel MIMO VLC system and formulate an asymptotic capacity maximization problem to configure the parameters of RIS. For the non-convex optimization problem, we analyze the problem and transform it into a more tractable form. Meanwhile, effective algorithms are proposed to search for the optimal solution. After comparing several algorithms, we can obtain that the proposed relaxed convex optimization algorithm and the RPSO algorithm are more effective algorithms for solving this kind of problem. Simulation results imply that the asymptotic capacity can be improved when the RIS units increase, and the proposed algorithms can enhance the performance more effectively compared with other assignment schemes.
Author Contributions
Conceptualization, Q.W.; methodology, J.G.; software, Q.W.; validation, Q.W.; formal analysis, Q.W.; investigation, Q.W.; resources, Q.W.; data curation, G.X.; writing—original draft preparation, Q.W.; writing—review and editing, J.Z.; visualization, Q.W.; supervision, Y.Z.; project administration, J.Z.; funding acquisition, J.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the National Natural Science Foundation of China (NSFC) under Grant (62071489) and the National Key Research and Development Project (2018YFB1801903).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Obeed, M.; Salhab, A.M.; Alouini, M.S.; Zummo, S.A. On optimizing VLC networks for downlink multi-user transmission: A survey. IEEE Commun. Surv. Tutor. 2019, 21, 2947–2976. [Google Scholar] [CrossRef]
- Karunatilaka, D.; Zafar, F.; Kalavally, V.; Parthiban, R. LED based indoor visible light communications: State of the art. IEEE Commun. Surv. Tutor. 2015, 17, 1649–1678. [Google Scholar] [CrossRef]
- Fath, T.; Haas, H. Performance comparison of MIMO techniques for optical wireless communications in indoor environments. IEEE Trans. Commun. 2012, 61, 733–742. [Google Scholar] [CrossRef]
- Ciaramella, E.; Arimoto, Y.; Contestabile, G.; Presi, M.; D’Errico, A.; Guarino, V.; Matsumoto, M. 1.28 Terabit/s (32x40 Gbit/s) WDM transmission system for free space optical communications. IEEE J. Sel. Areas Commun. 2009, 27, 1639–1645. [Google Scholar] [CrossRef]
- Monteiro, E.; Hranilovic, S. Design and implementation of color-shift keying for visible light communications. J. Lightwave Technol. 2014, 32, 2053–2060. [Google Scholar] [CrossRef]
- Gao, Q.; Wang, R.; Xu, Z.; Hua, Y. DC-informative joint color-frequency modulation for visible light communications. J. Lightwave Technol. 2015, 33, 2181–2188. [Google Scholar] [CrossRef]
- Abdelhady, A.M.; Amin, O.; Chaaban, A.; Alouini, M.S. Downlink resource allocation for multichannel TDMA visible light communications. In Proceedings of the 2016 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Washington, DC, USA, 7–9 December 2016; pp. 1–5. [Google Scholar]
- Chaaban, A.; Rezki, Z.; Alouini, M.S. Fundamental limits of parallel optical wireless channels: Capacity results and outage formulation. IEEE Trans. Commun. 2016, 65, 296–311. [Google Scholar] [CrossRef]
- ElMossallamy, M.A.; Zhang, H.; Song, L.; Seddik, K.G.; Han, Z.; Li, G.Y. Reconfigurable intelligent surfaces for wireless communications: Principles, challenges, and opportunities. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 990–1002. [Google Scholar] [CrossRef]
- Basar, E.; Di Renzo, M.; De Rosny, J.; Debbah, M.; Alouini, M.S.; Zhang, R. Wireless communications through reconfigurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Di Renzo, M.; Zappone, A.; Debbah, M.; Alouini, M.S.; Yuen, C.; De Rosny, J.; Tretyakov, S. Smart radio environments empowered by reconfigurable intelligent surfaces: How it works, state of research, and the road ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Guo, H.; Liang, Y.C.; Chen, J.; Larsson, E.G. Weighted sum-rate maximization for reconfigurable intelligent surface aided wireless networks. IEEE Trans. Wirel. Commun. 2020, 19, 3064–3076. [Google Scholar] [CrossRef]
- Aboagye, S.; Ngatched, T.M.; Dobre, O.A.; Ndjiongue, A.R. Intelligent reflecting surface-aided indoor visible light communication systems. IEEE Commun. Lett. 2021, 25, 3913–3917. [Google Scholar] [CrossRef]
- Cao, B.; Chen, M.; Yang, Z.; Zhang, M.; Zhao, J.; Chen, M. Reflecting the light: Energy efficient visible light communication with reconfigurable intelligent surface. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–5. [Google Scholar]
- Sun, S.; Yang, F.; Song, J. Sum rate maximization for intelligent reflecting surface-aided visible light communications. IEEE Commun. Lett. 2021, 25, 3619–3623. [Google Scholar] [CrossRef]
- Sun, S.; Yang, F.; Song, J.; Han, Z. Joint resource management for intelligent reflecting surface–aided visible light communications. IEEE Trans. Wirel. Commun. 2022, 21, 6508–6522. [Google Scholar] [CrossRef]
- Qian, L.; Chi, X.; Zhao, L.; Chaaban, A. Secure visible light communications via intelligent reflecting surfaces. In Proceedings of the ICC 2021-IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Sun, S.; Yang, F.; Song, J.; Han, Z. Optimization on Multi-User Physical Layer Security of Intelligent Reflecting Surface-Aided VLC. arXiv 2022, arXiv:2201.00705. [Google Scholar]
- Wu, Q.; Zhang, J.; Guo, J. Capacity Maximization for Reconfigurable Intelligent Surface-Aided MISO Visible Light Communications. Photonics 2022, 9, 487. [Google Scholar] [CrossRef]
- Sun, S.; Yang, F.; Song, J.; Zhang, R. Intelligent Reflecting Surface for MIMO VLC: Joint Design of Surface Configuration and Transceiver Signal Processing. arXiv 2022, arXiv:2206.14465. [Google Scholar]
- Wu, Q.; Zhang, J.; Guo, J.N. Position Design for Reconfigurable Intelligent-Surface-Aided Indoor Visible Light Communication Systems. Electronics 2022, 11, 3076. [Google Scholar] [CrossRef]
- Abdelhady, A.M.; Salem, A.K.S.; Amin, O.; Shihada, B.; Alouini, M.S. Visible light communications via intelligent reflecting surfaces: Metasurfaces vs mirror arrays. IEEE Open J. Commun. Soc. 2020, 2, 1–20. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Lee, K.; Park, H.; Barry, J.R. Indoor channel characteristics for visible light communications. IEEE Commun. Lett. 2011, 15, 217–219. [Google Scholar] [CrossRef]
- Tang, T.; Shang, T.; Li, Q. Impact of multiple shadows on visible light communication channel. IEEE Commun. Lett. 2020, 25, 513–517. [Google Scholar] [CrossRef]
- Bubeck, S. Convex optimization: Algorithms and complexity. Found. Trends Mach. Learn. 2015, 8, 231–357. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 3, pp. 1945–1950. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).