
Remote-Controlled Method with Force and Visual Assists Based on Time to Collision for Mobile Robot


Abstract
:1. Introduction
2. Modeling
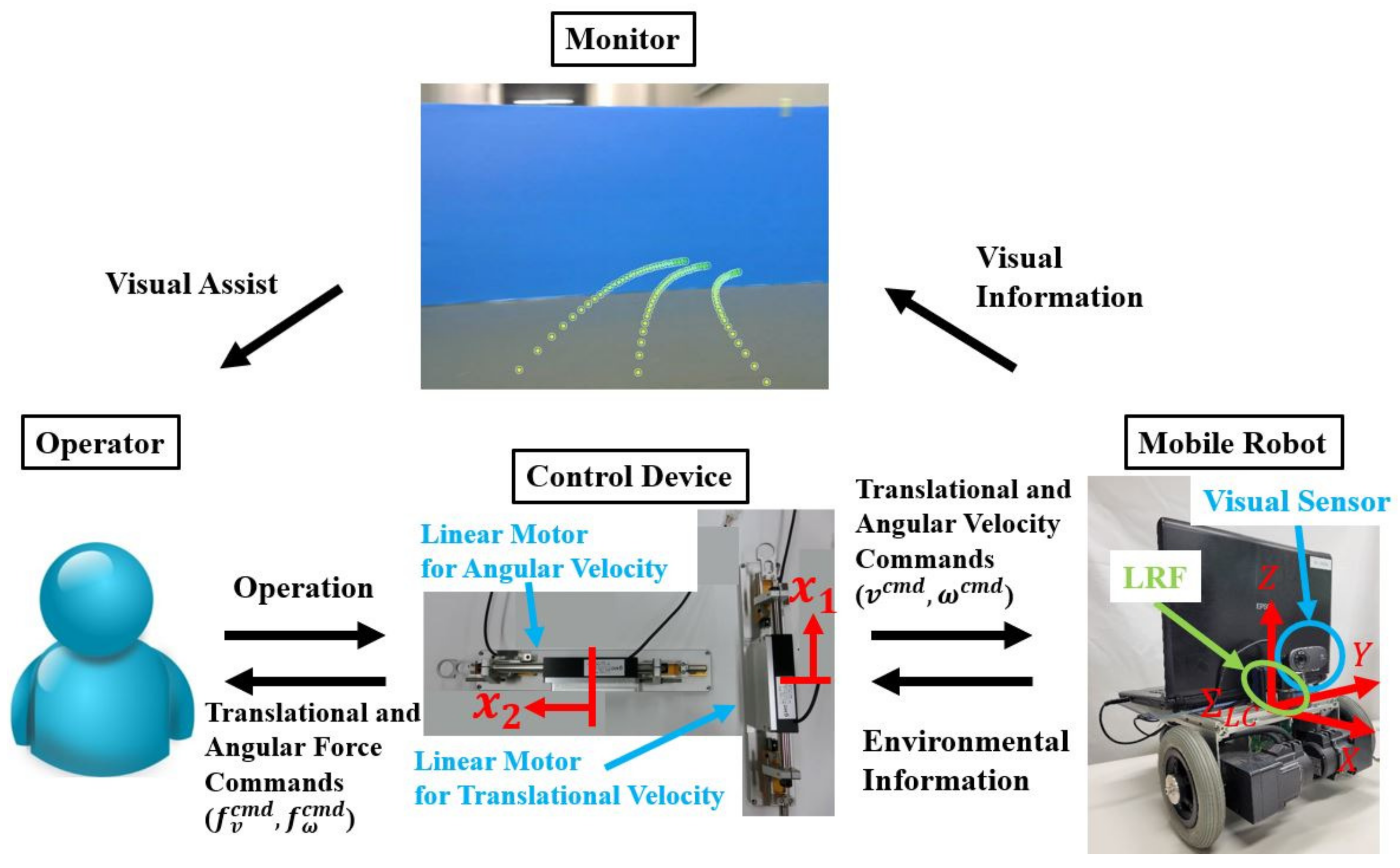
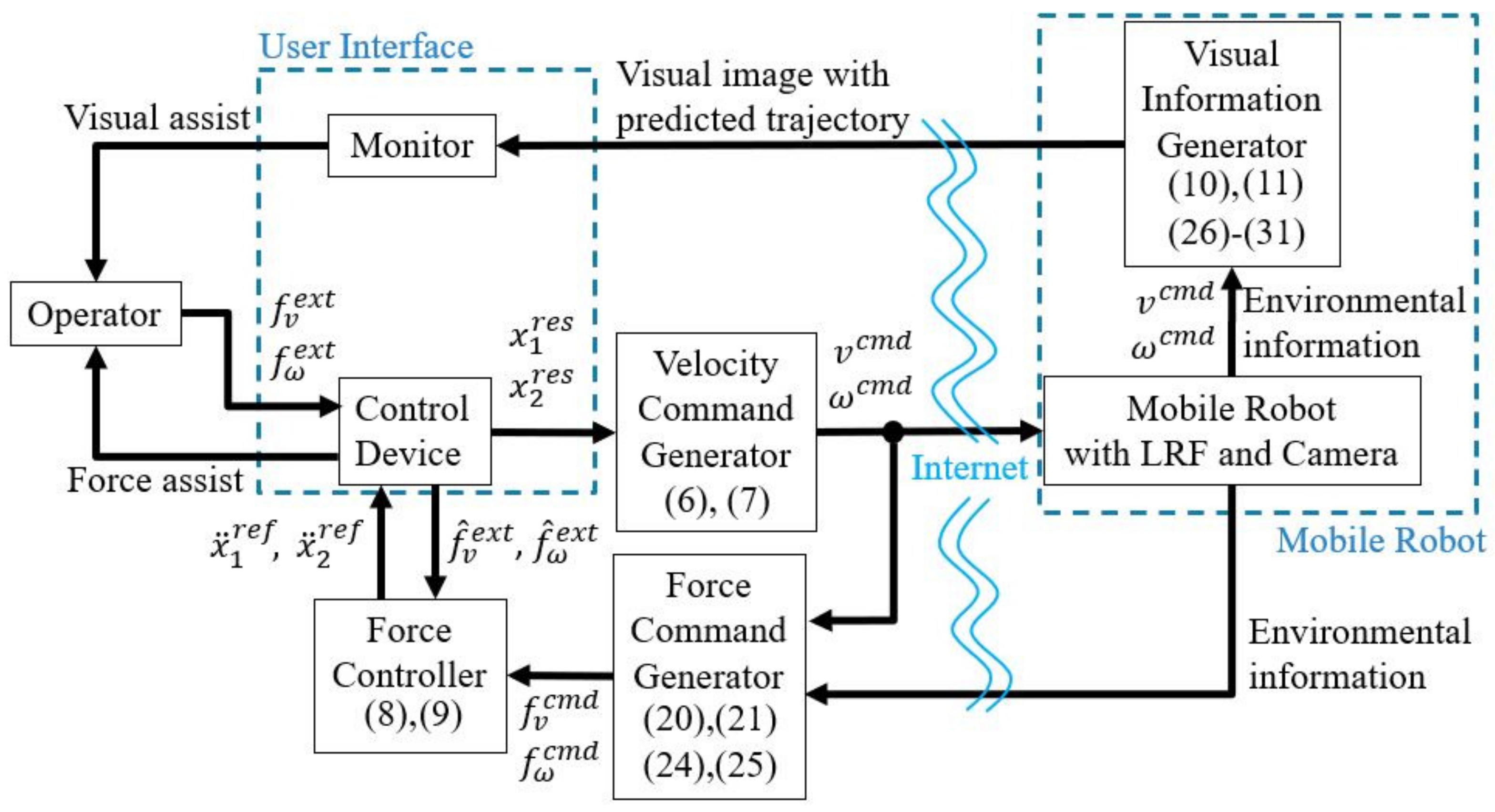
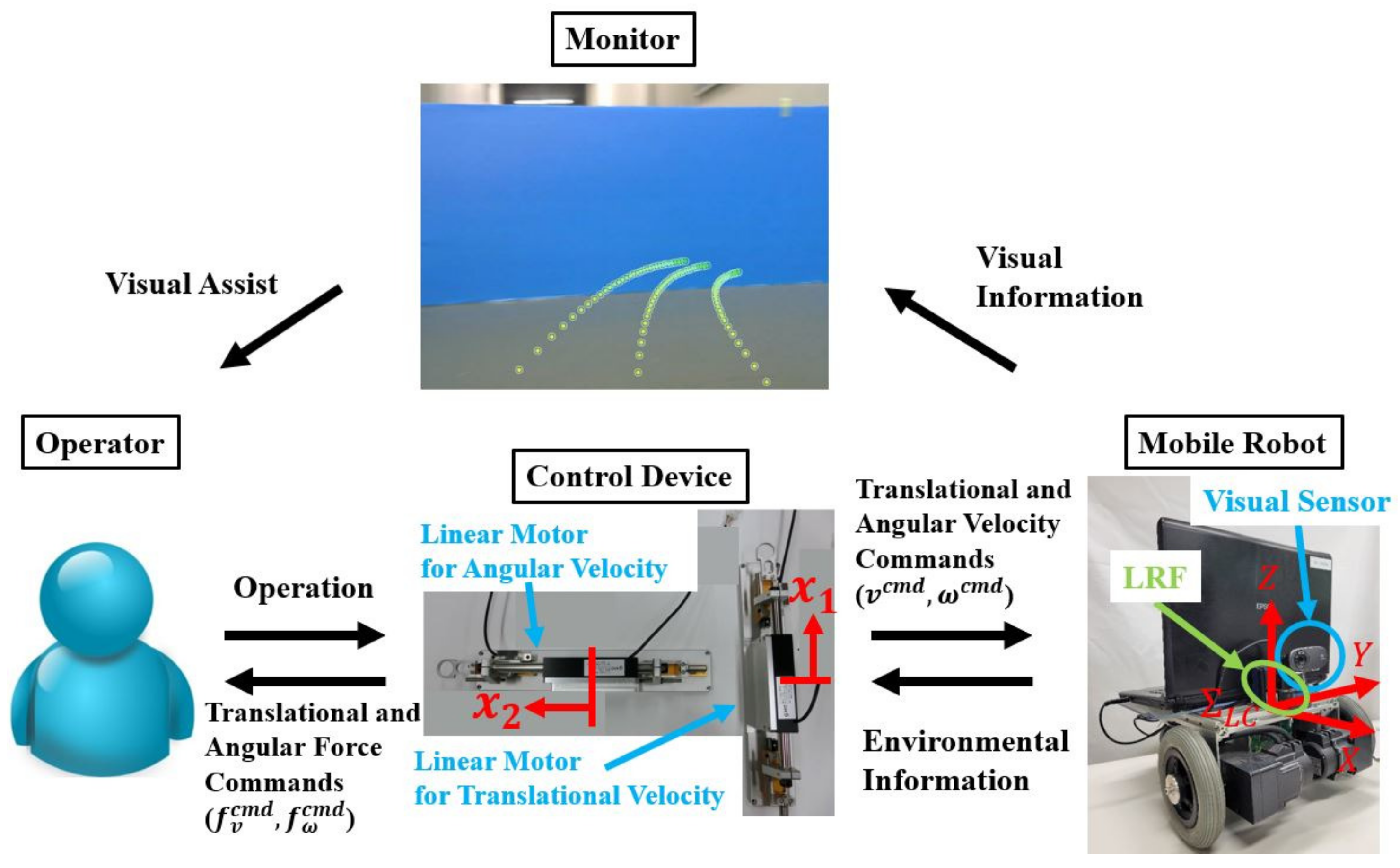
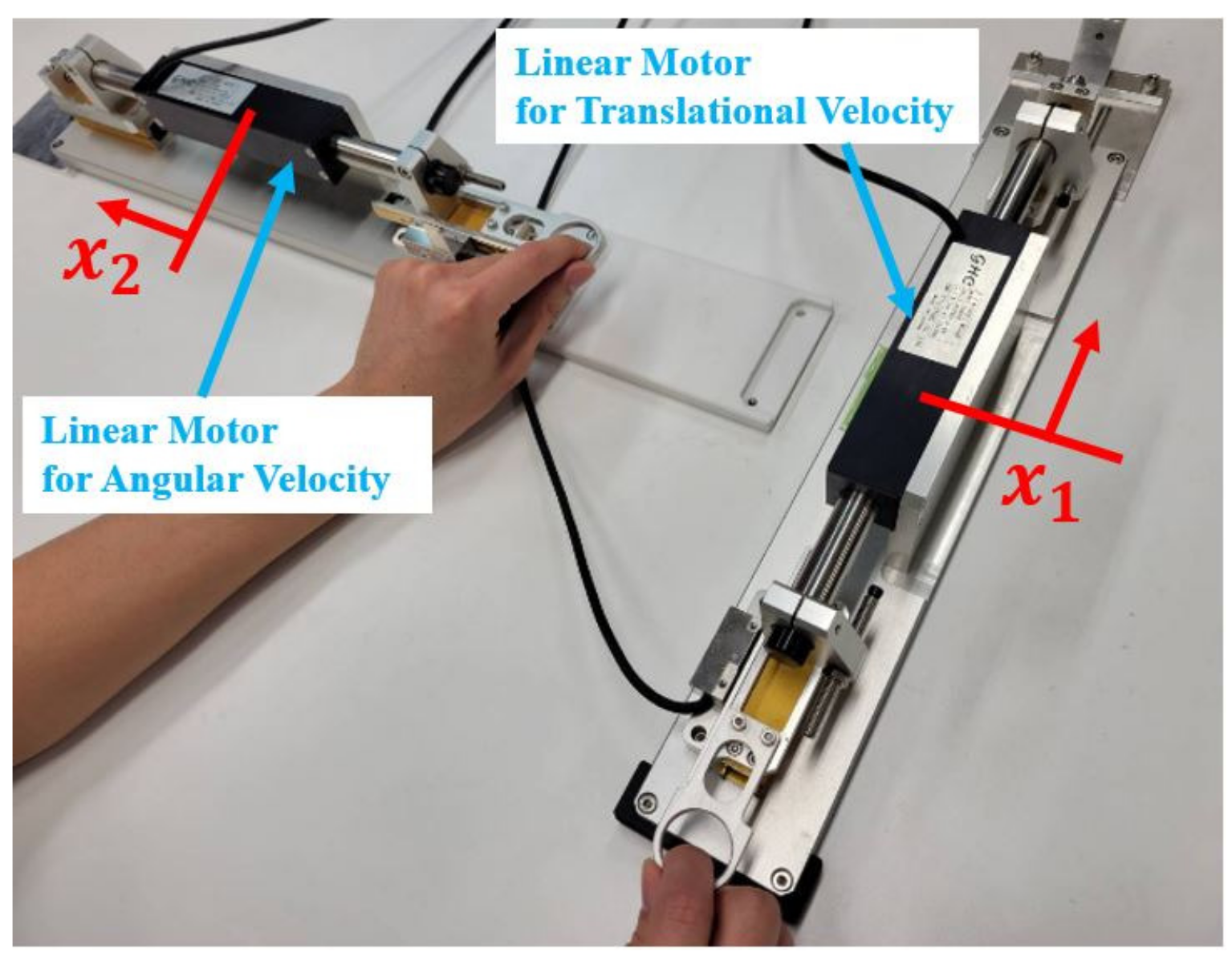
2.1. System Configuration
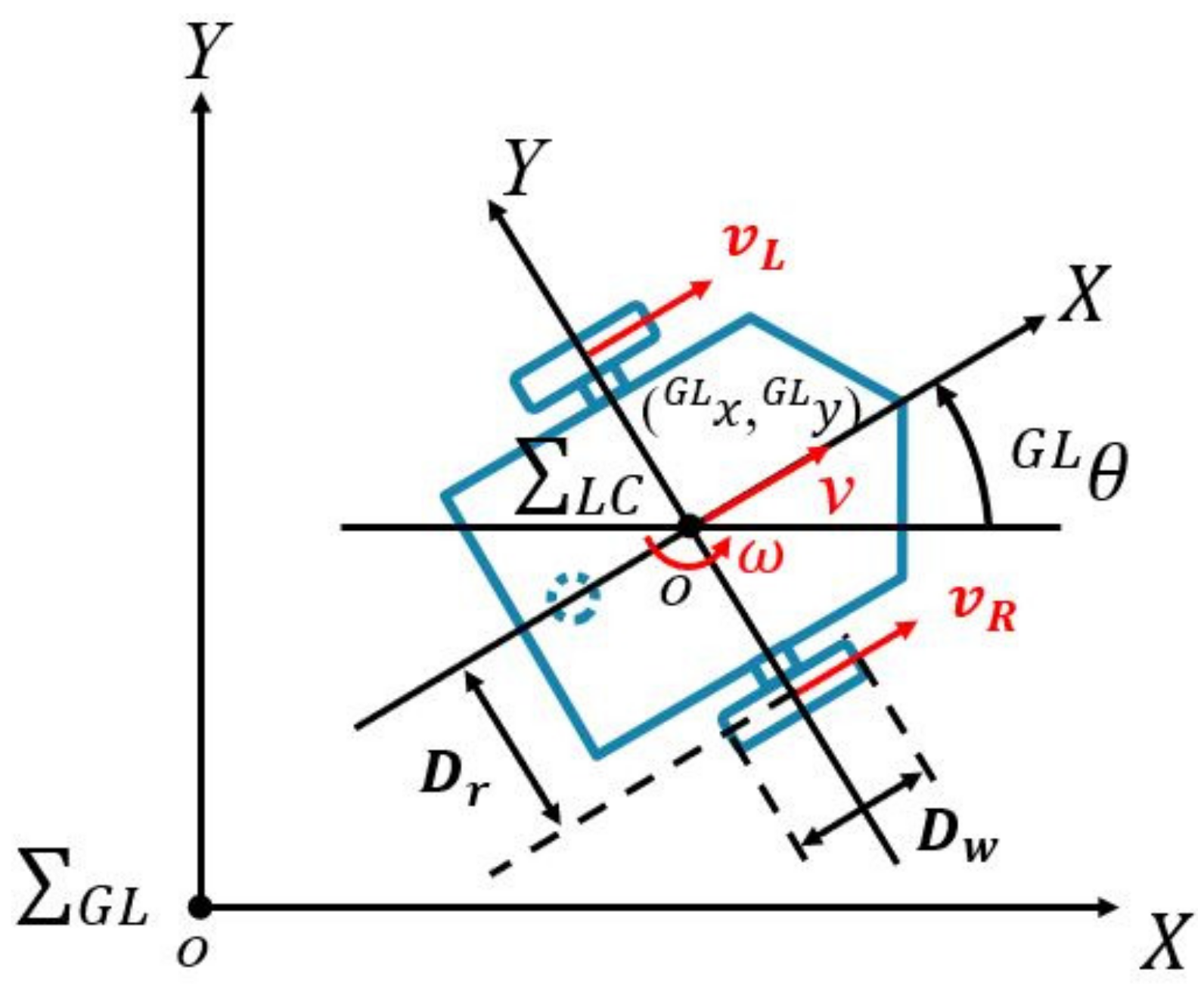
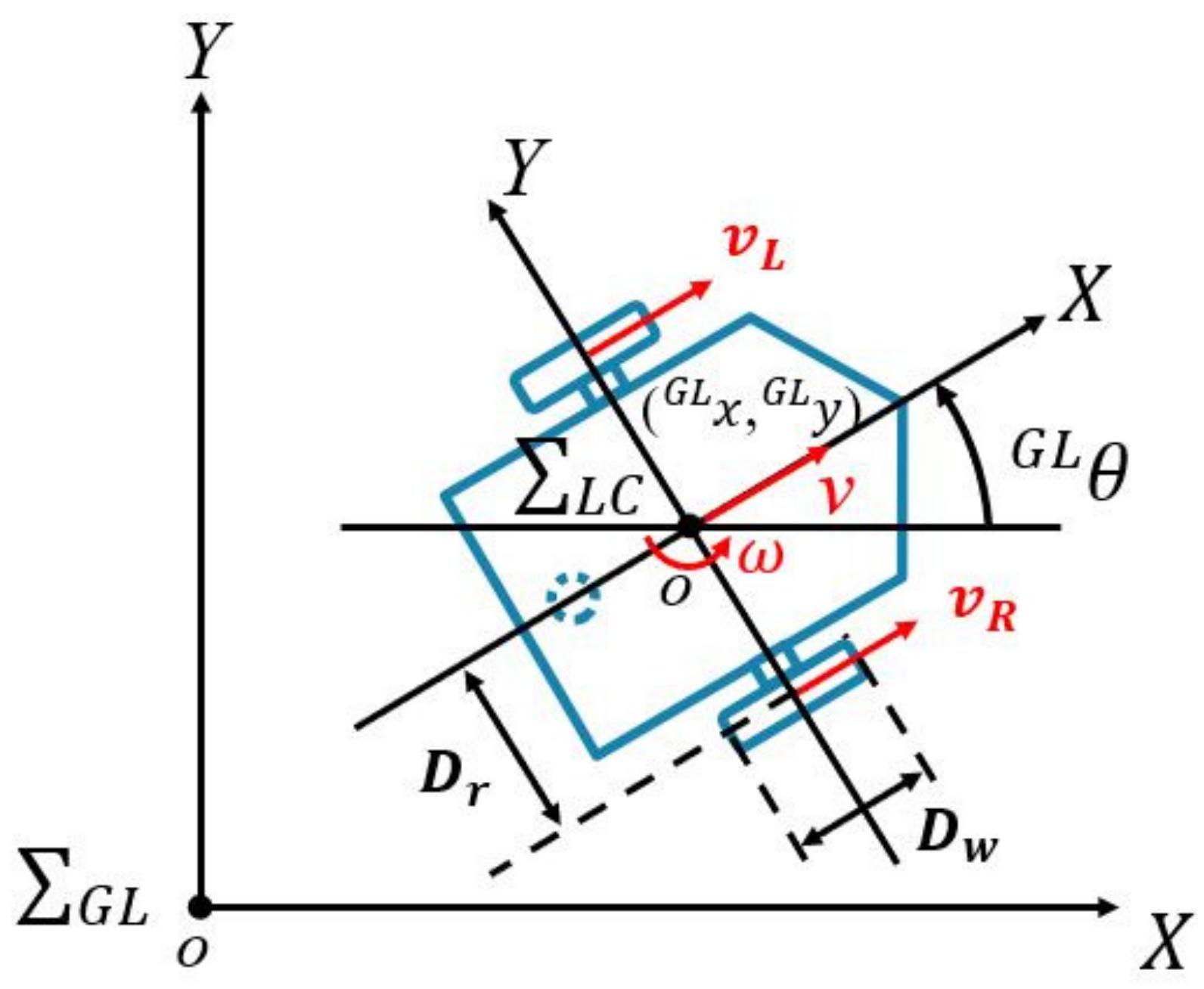
2.2. Mobile Robot
2.3. Velocity Command Generator
2.4. Force Controller
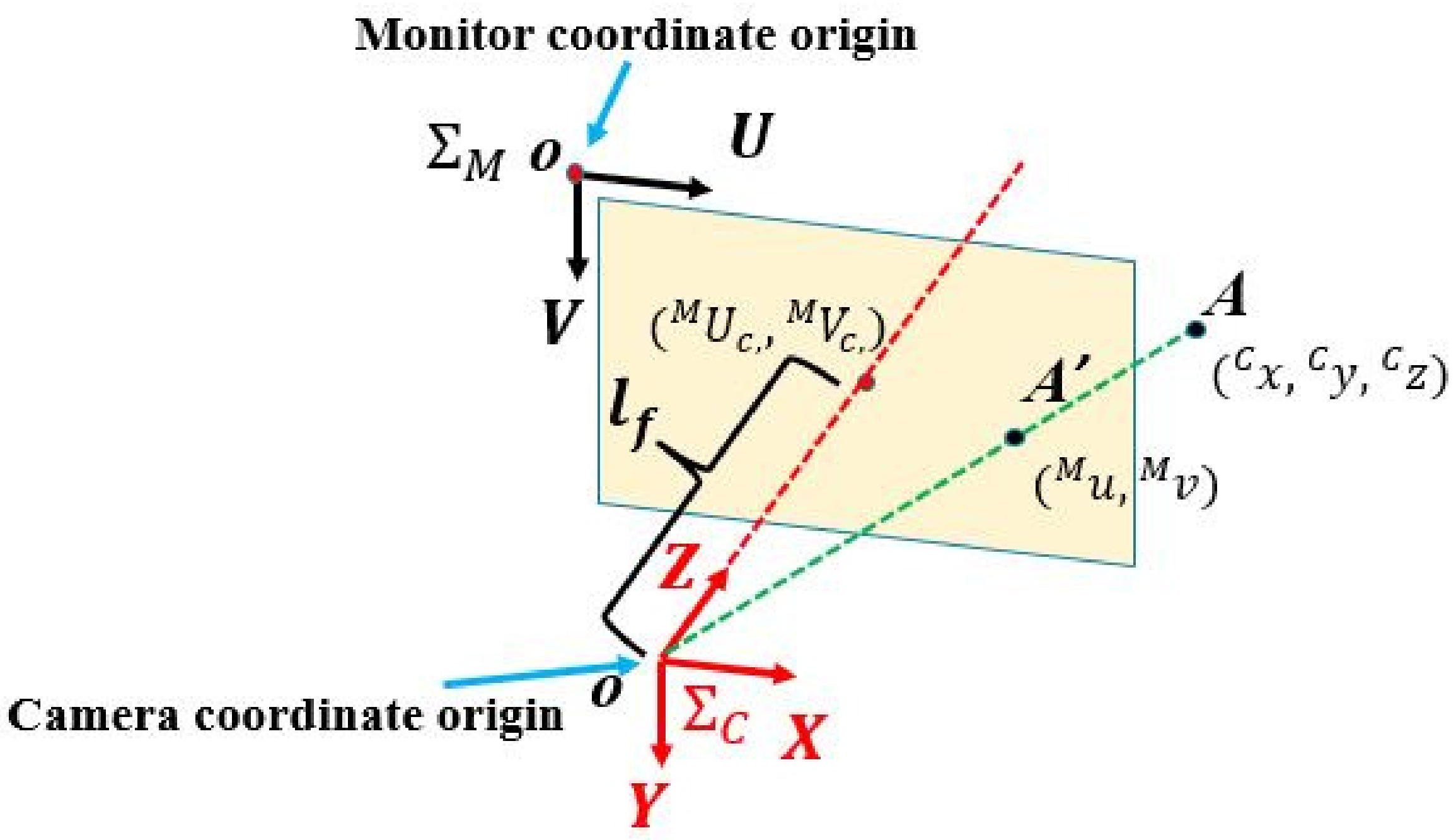
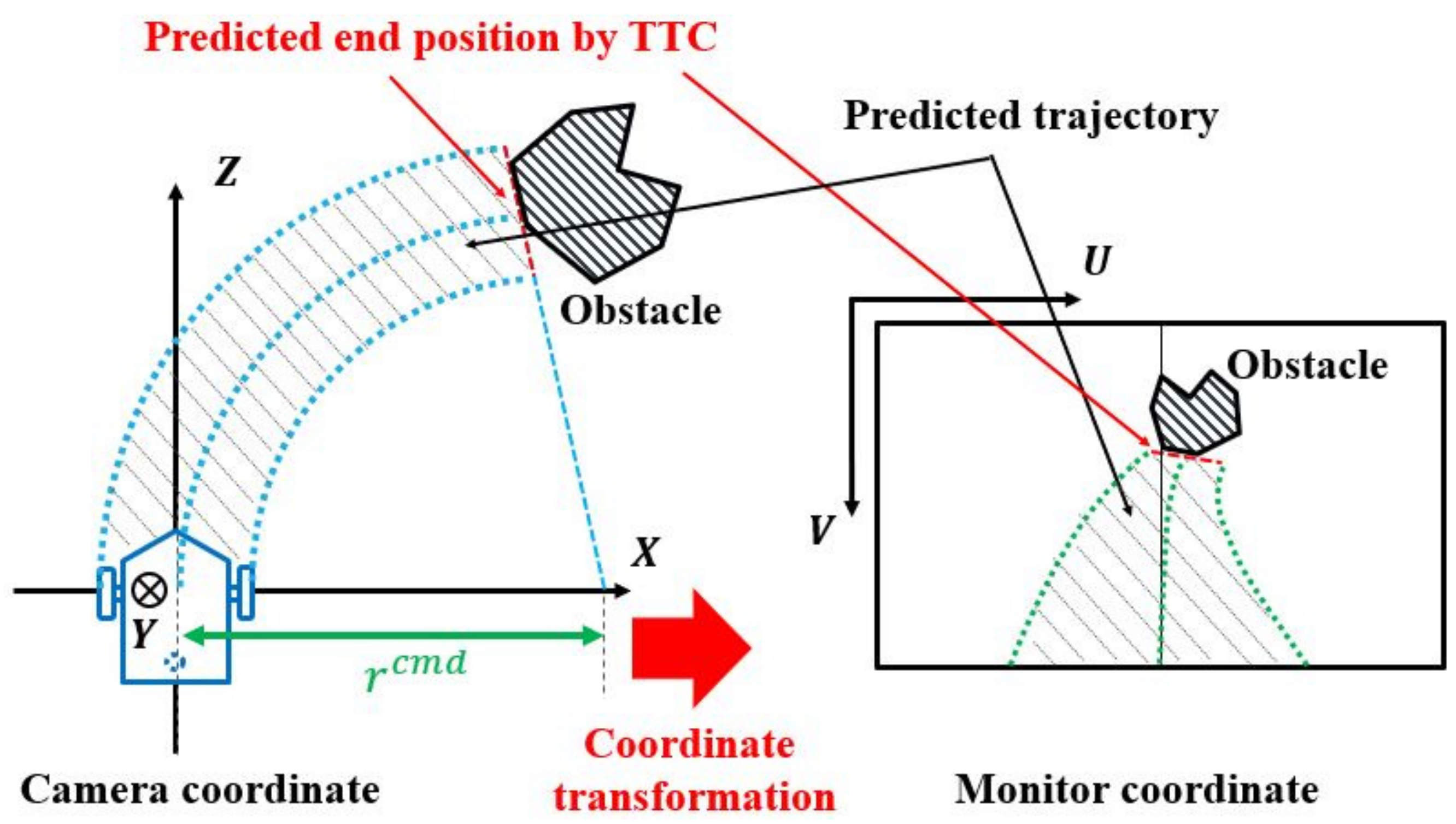
2.5. Camera Coordinate Transformation
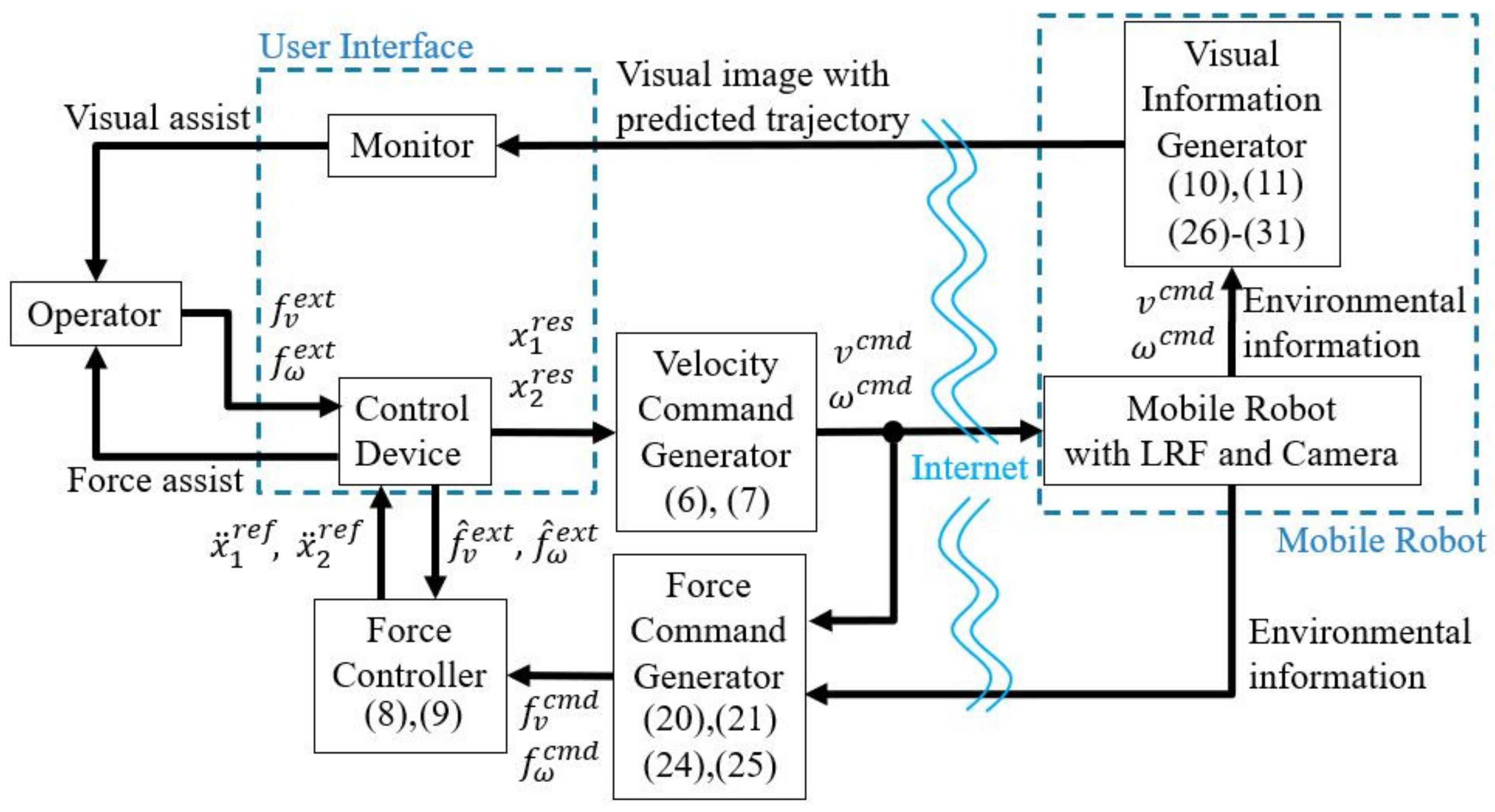
2.6. Overall Remote-Controlled System
3. Proposed Method
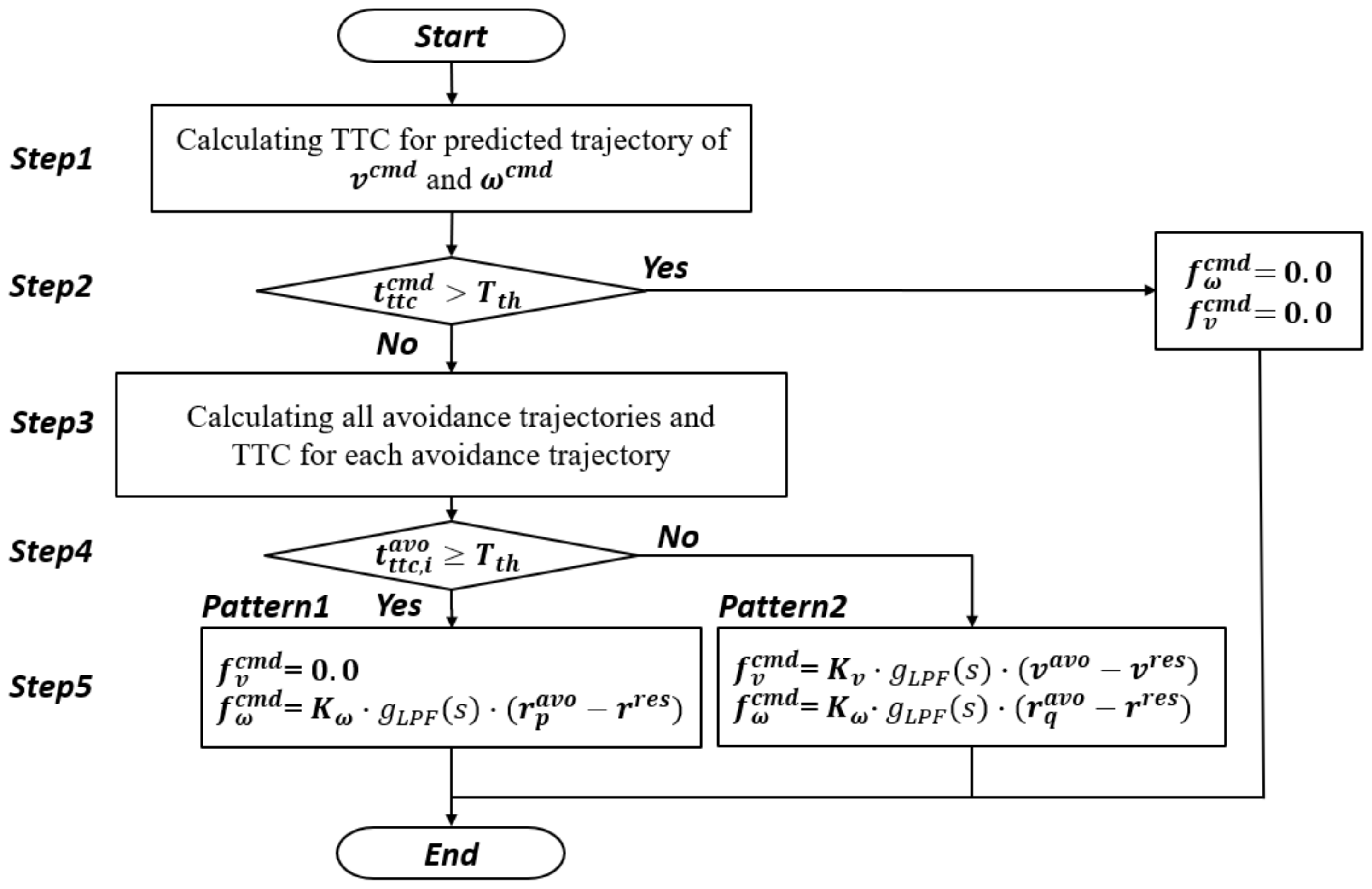
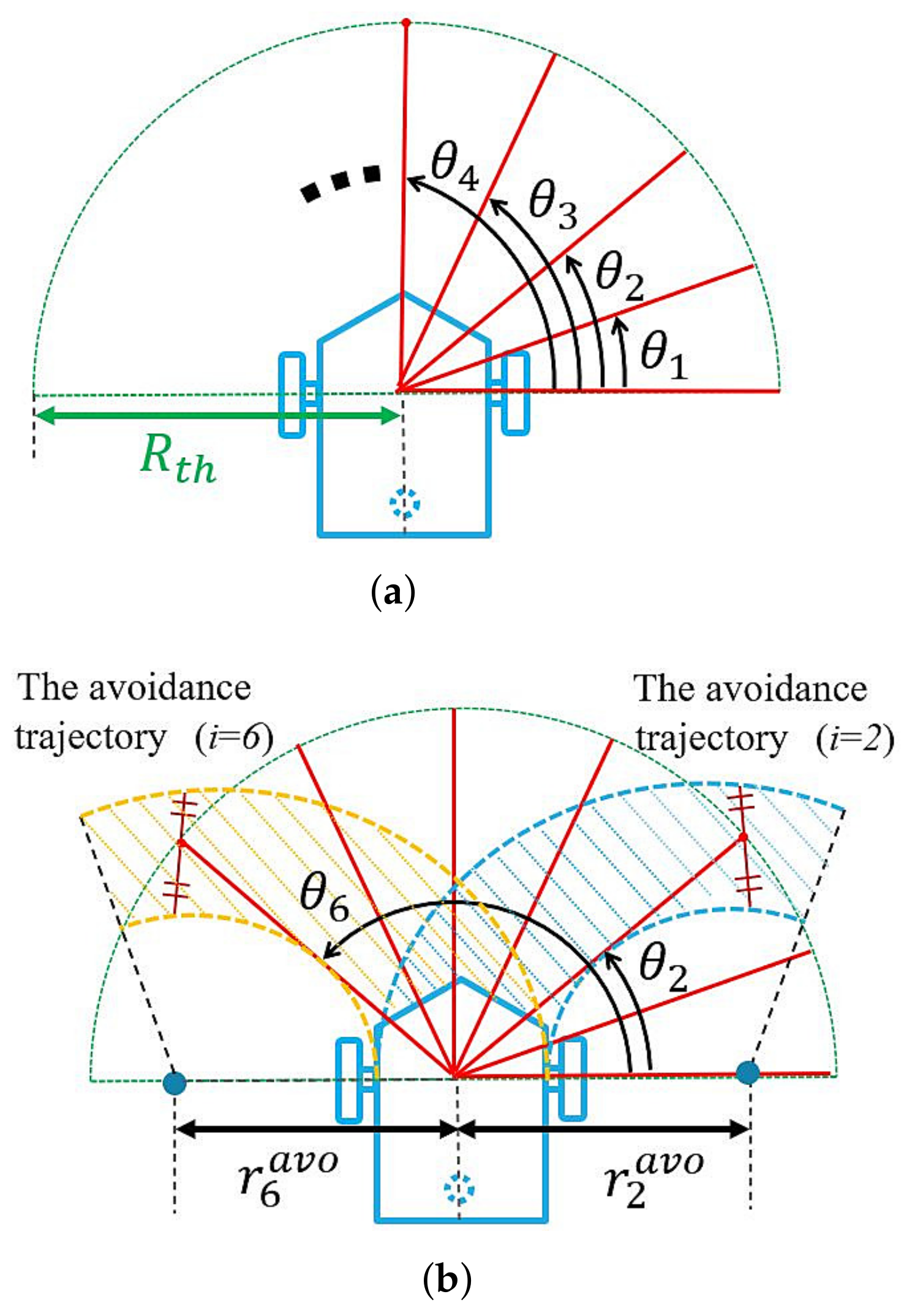
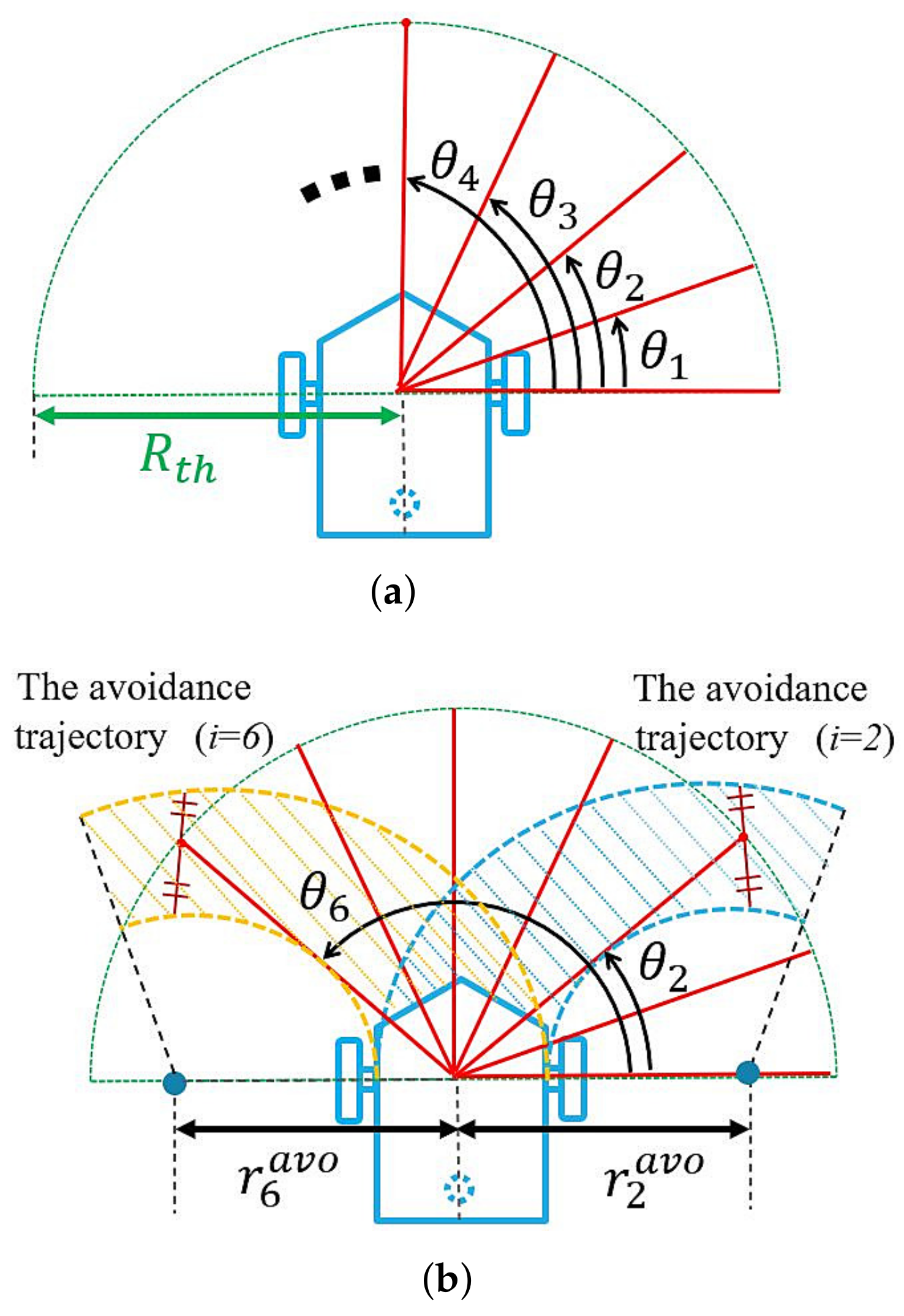
3.1. Force Assist
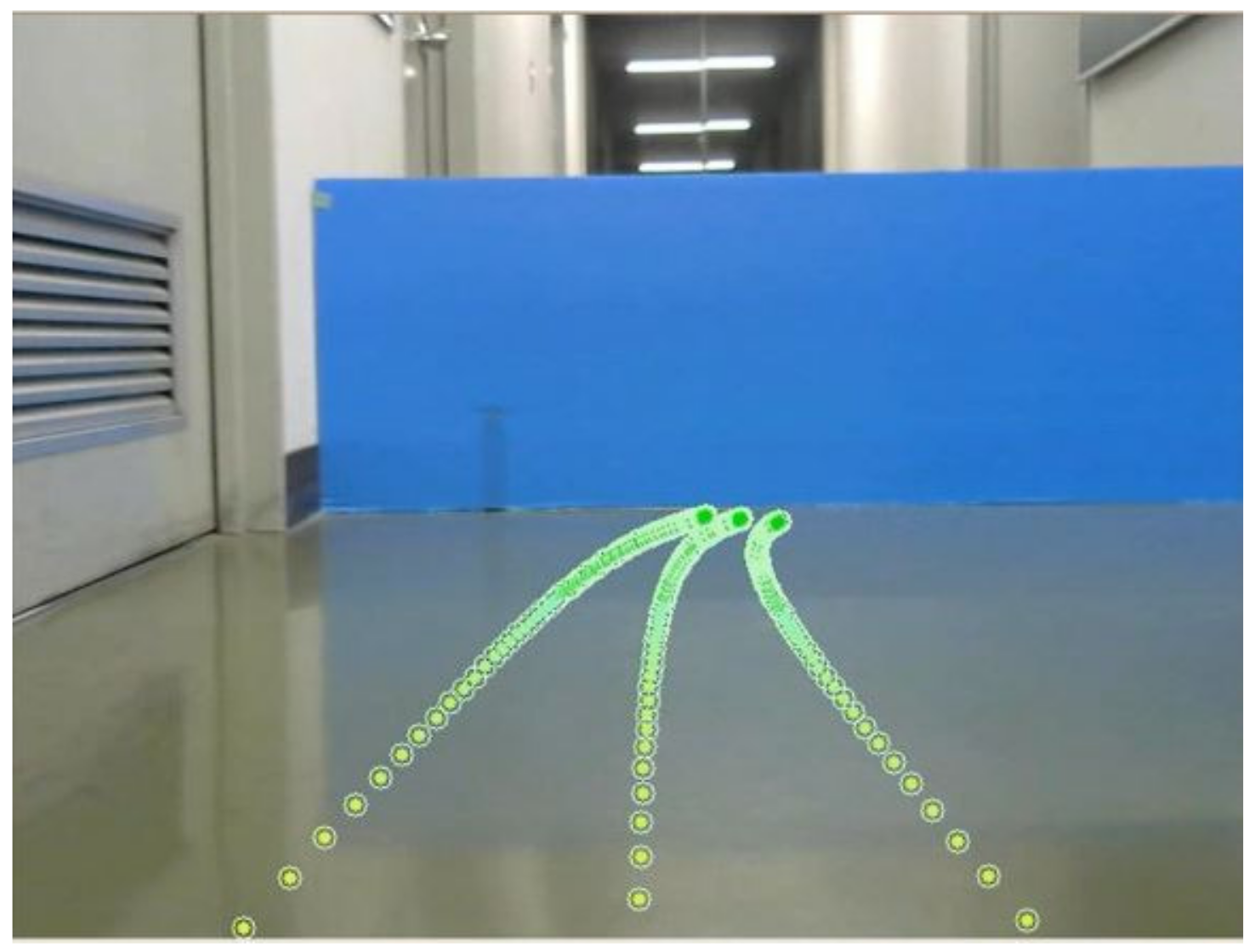
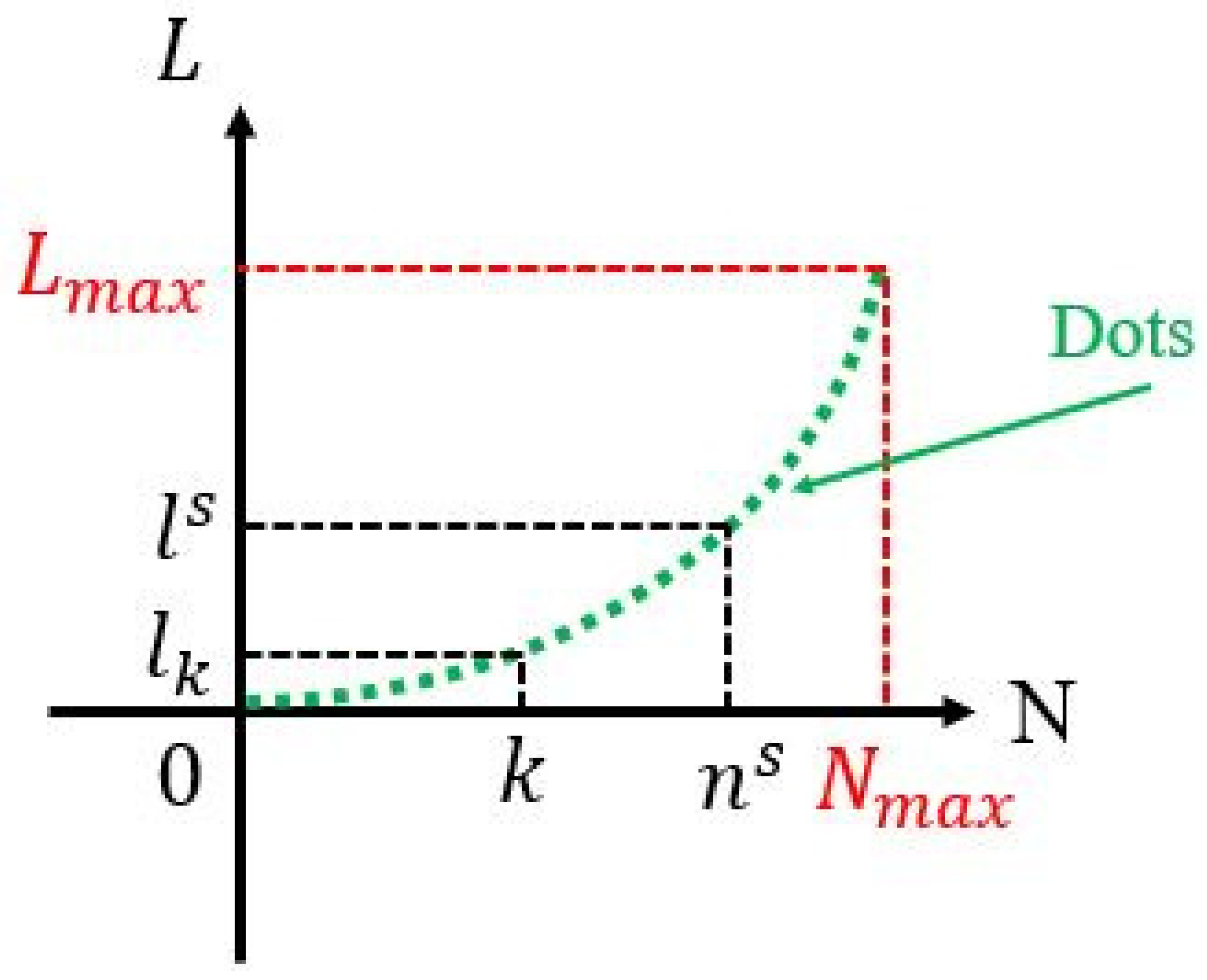
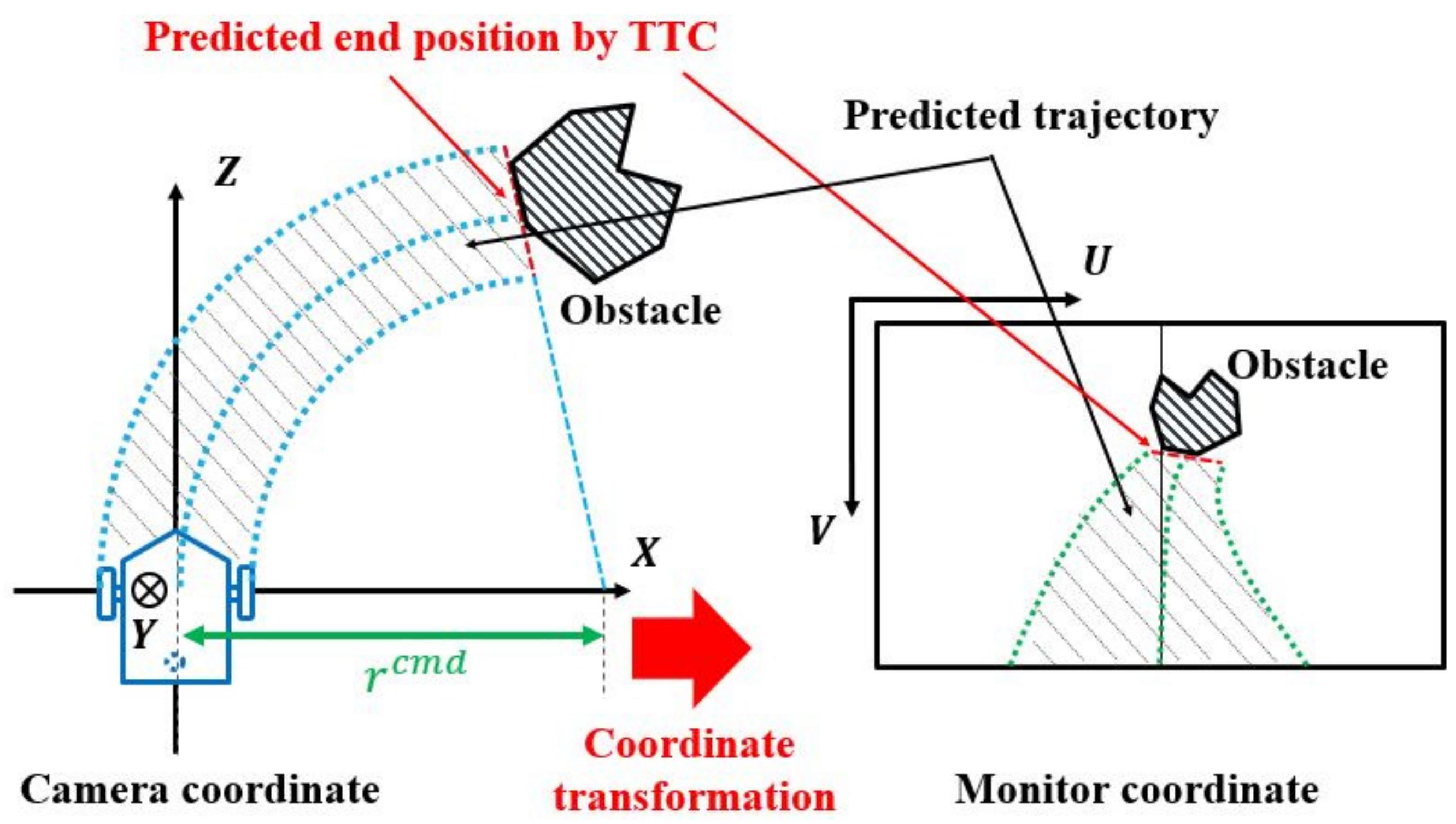
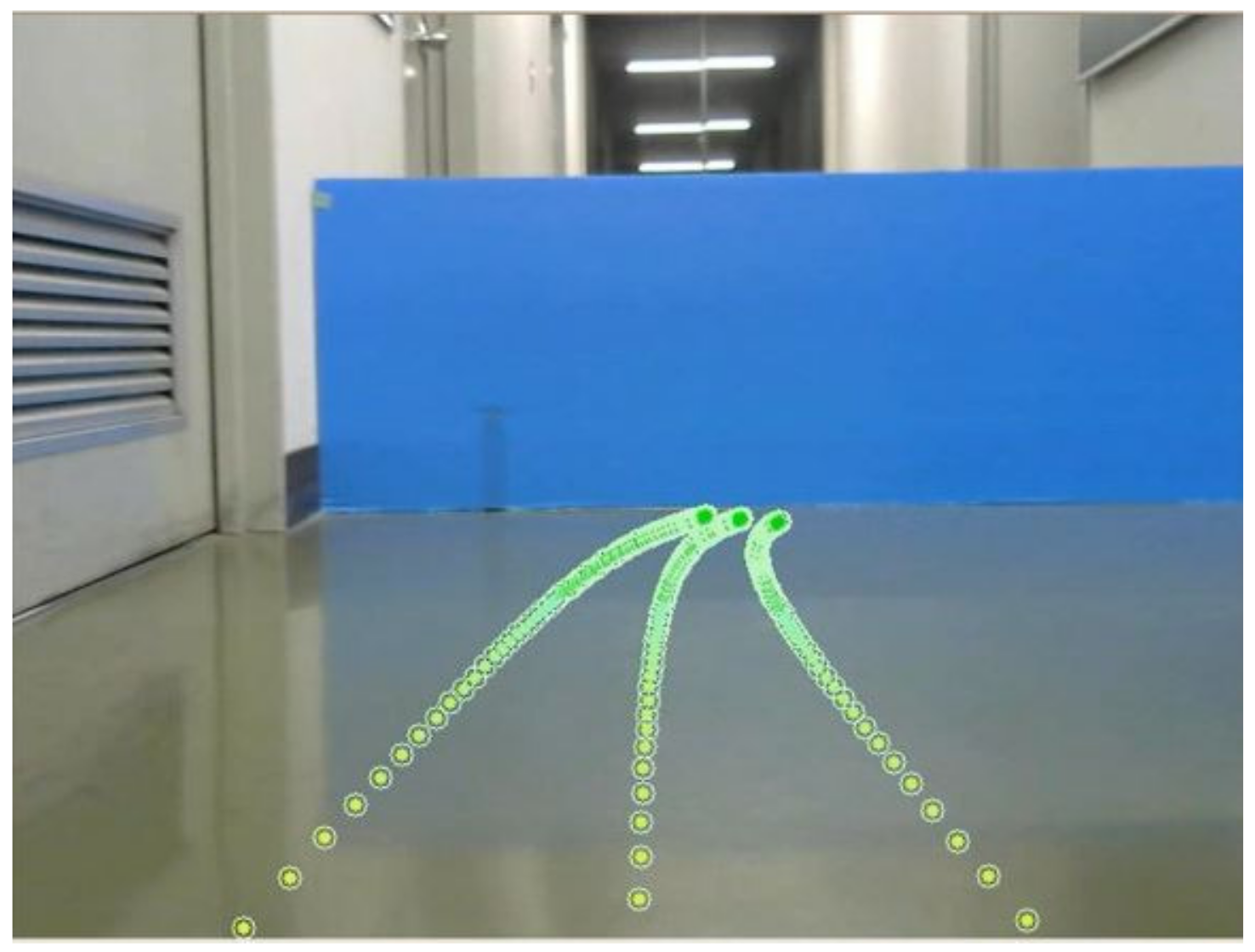
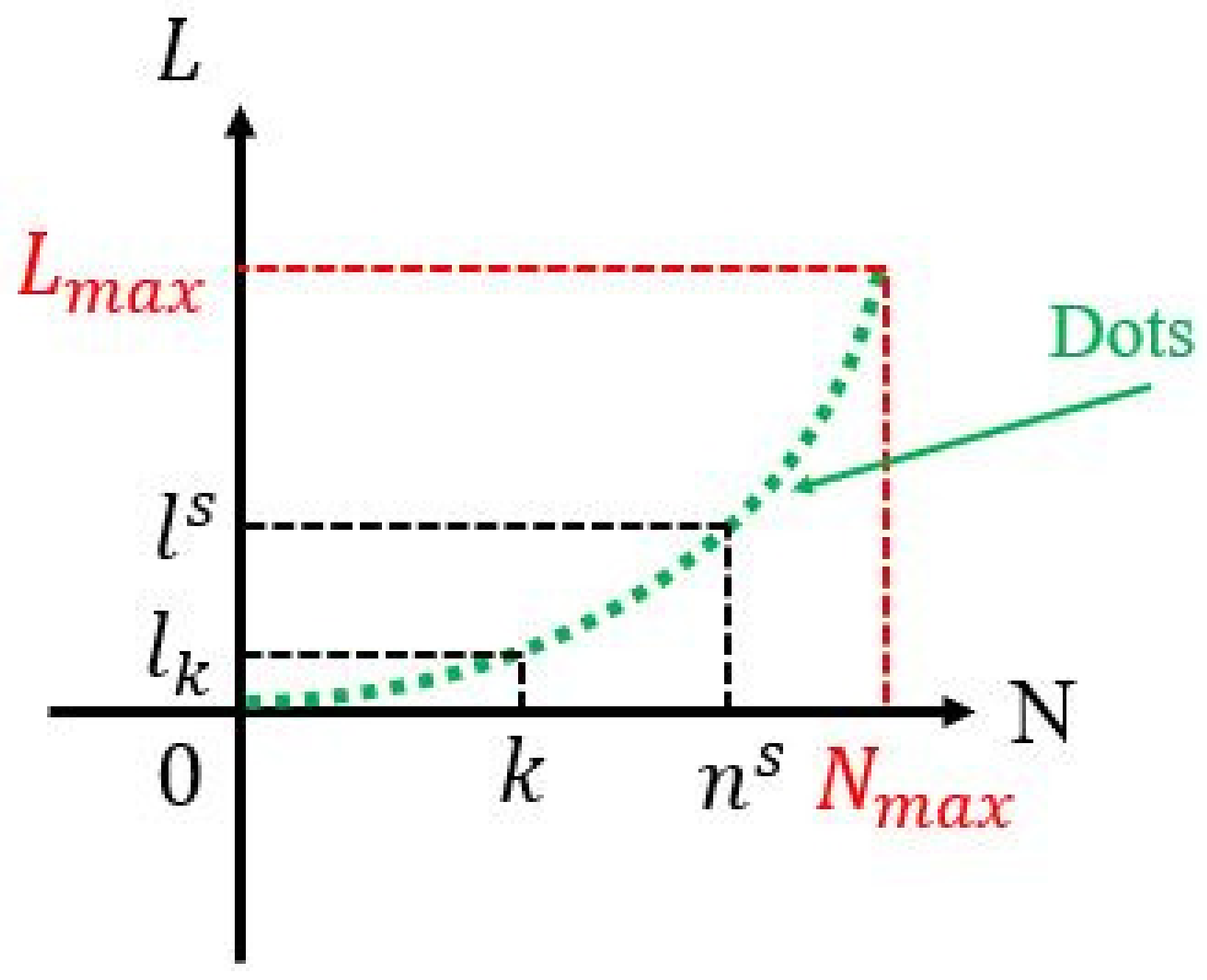
3.2. Visual Assist
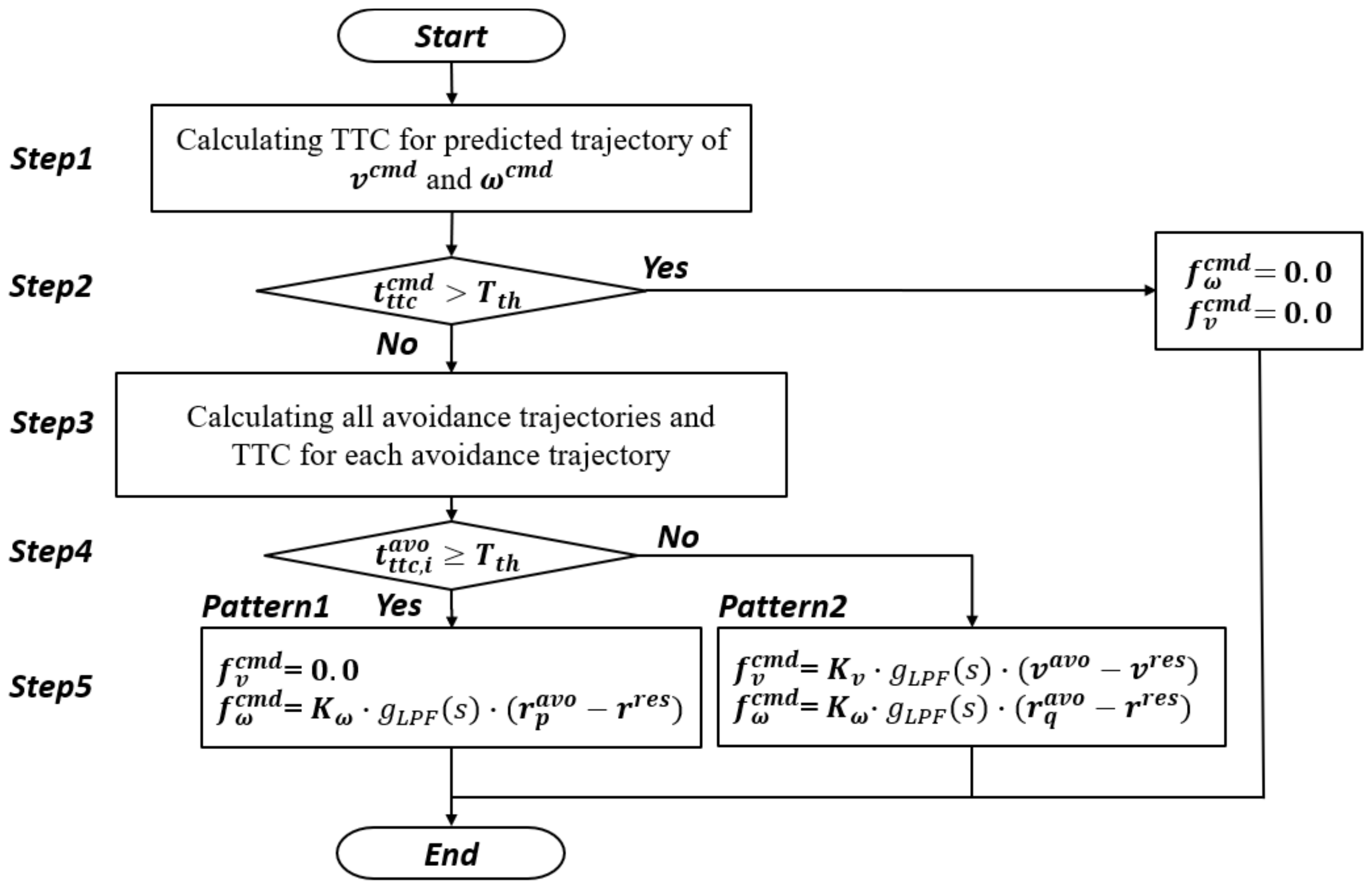
3.3. Force and Visual Assists
4. Experiment
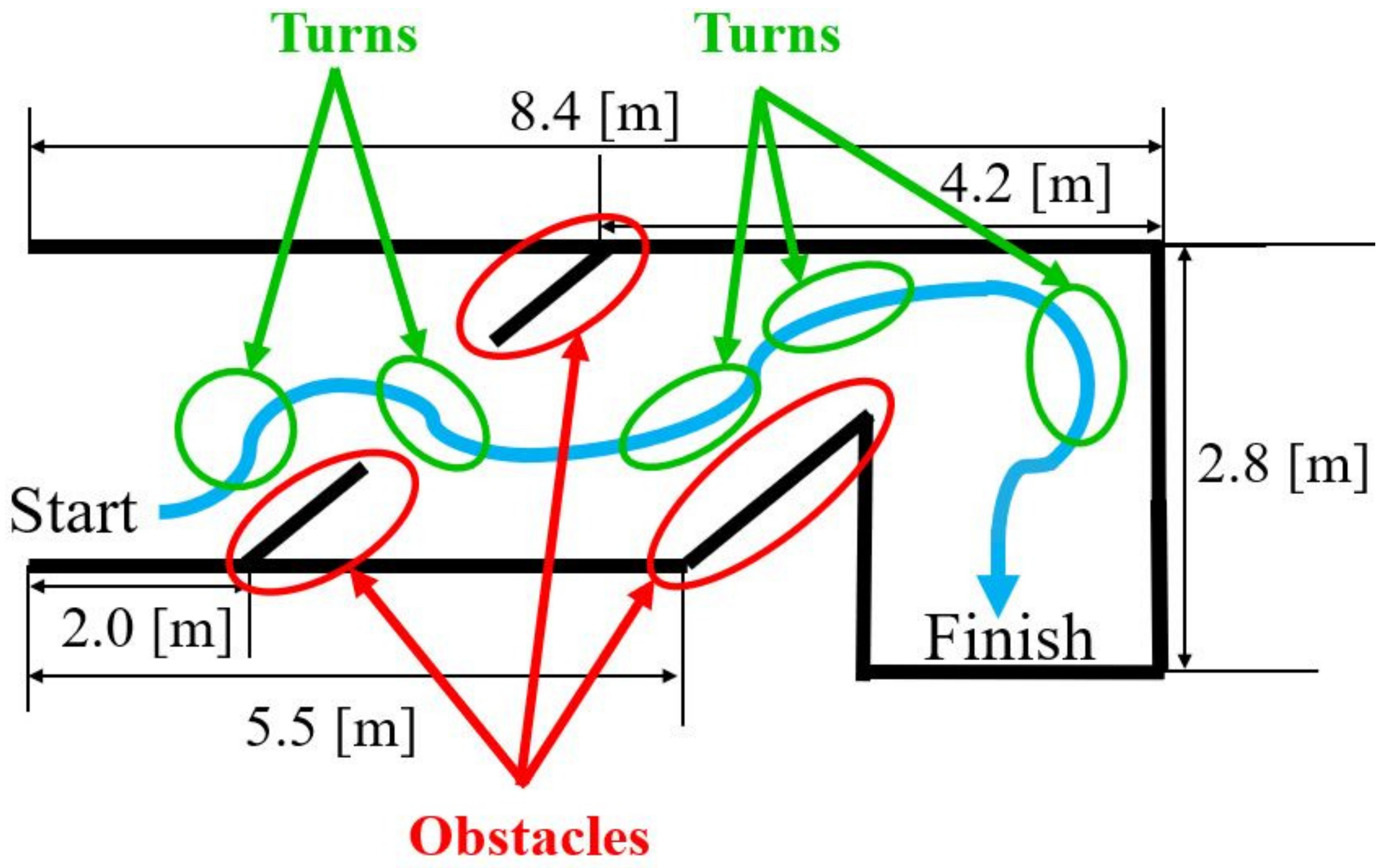
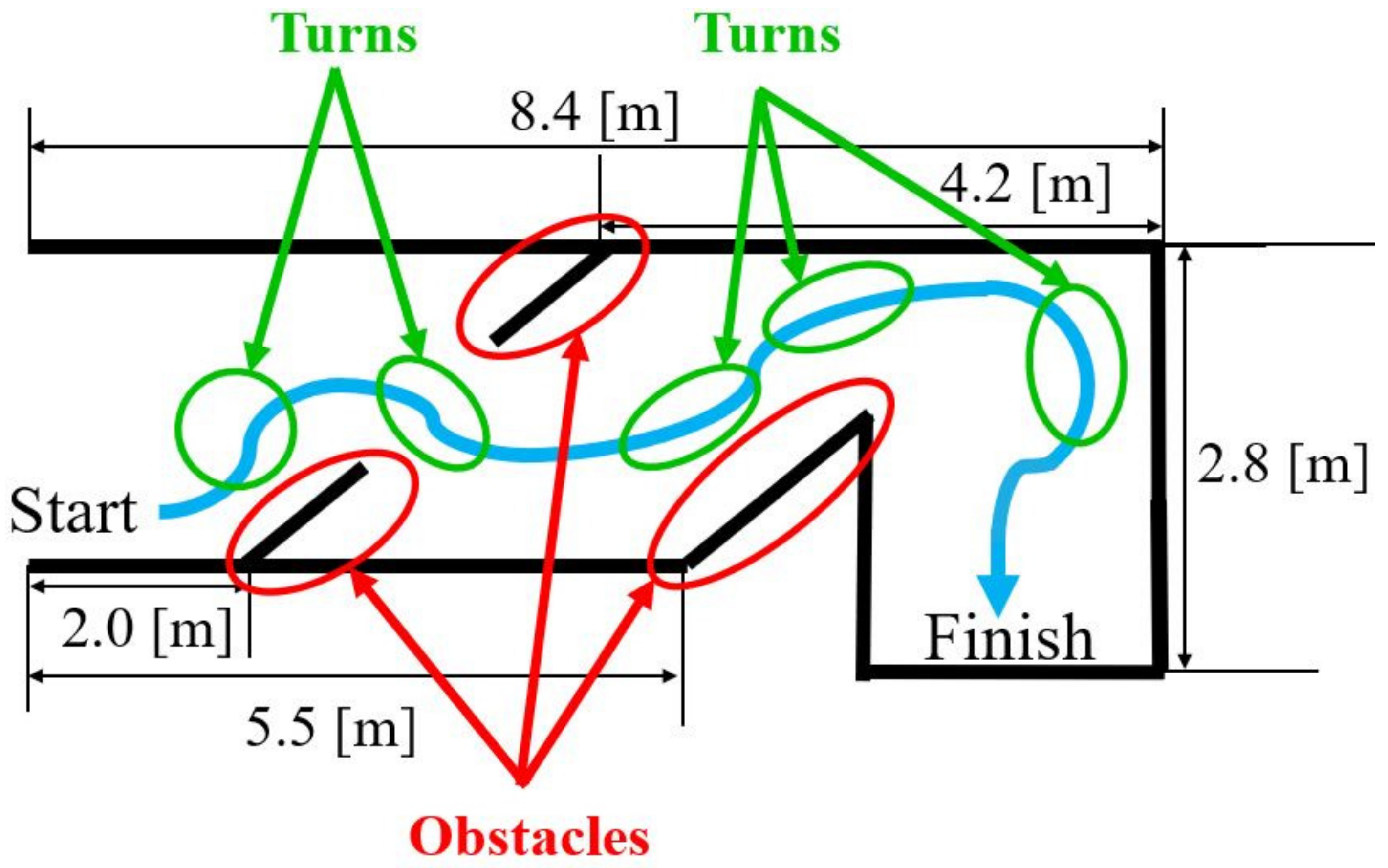
4.1. Experimental Setup
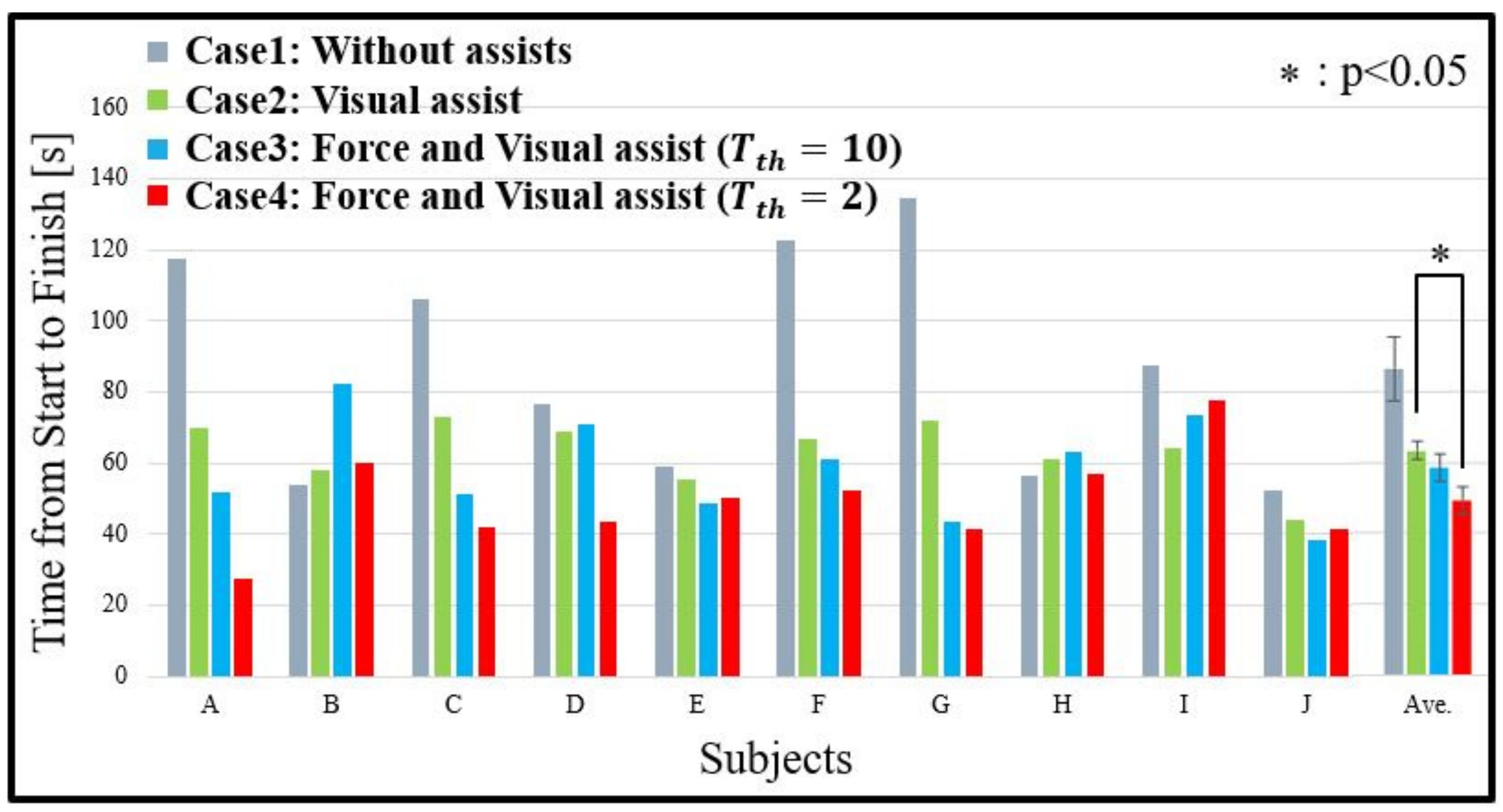
- Case 1: Without force and visual assists;
- Case 2: With visual assist;
- Case 3: With force and visual assists with high presence of force assist ( s);
- Case 4: With force and visual assists with low presence of force assist ( s).
- Comparison between Case 1 and Case 2 for evaluating the visual assist;
- Comparison between Case 3 and Case 4 for evaluating the presence of force assist;
- Comparison between Case 2 and Case 4 for evaluating the force and visual assists.
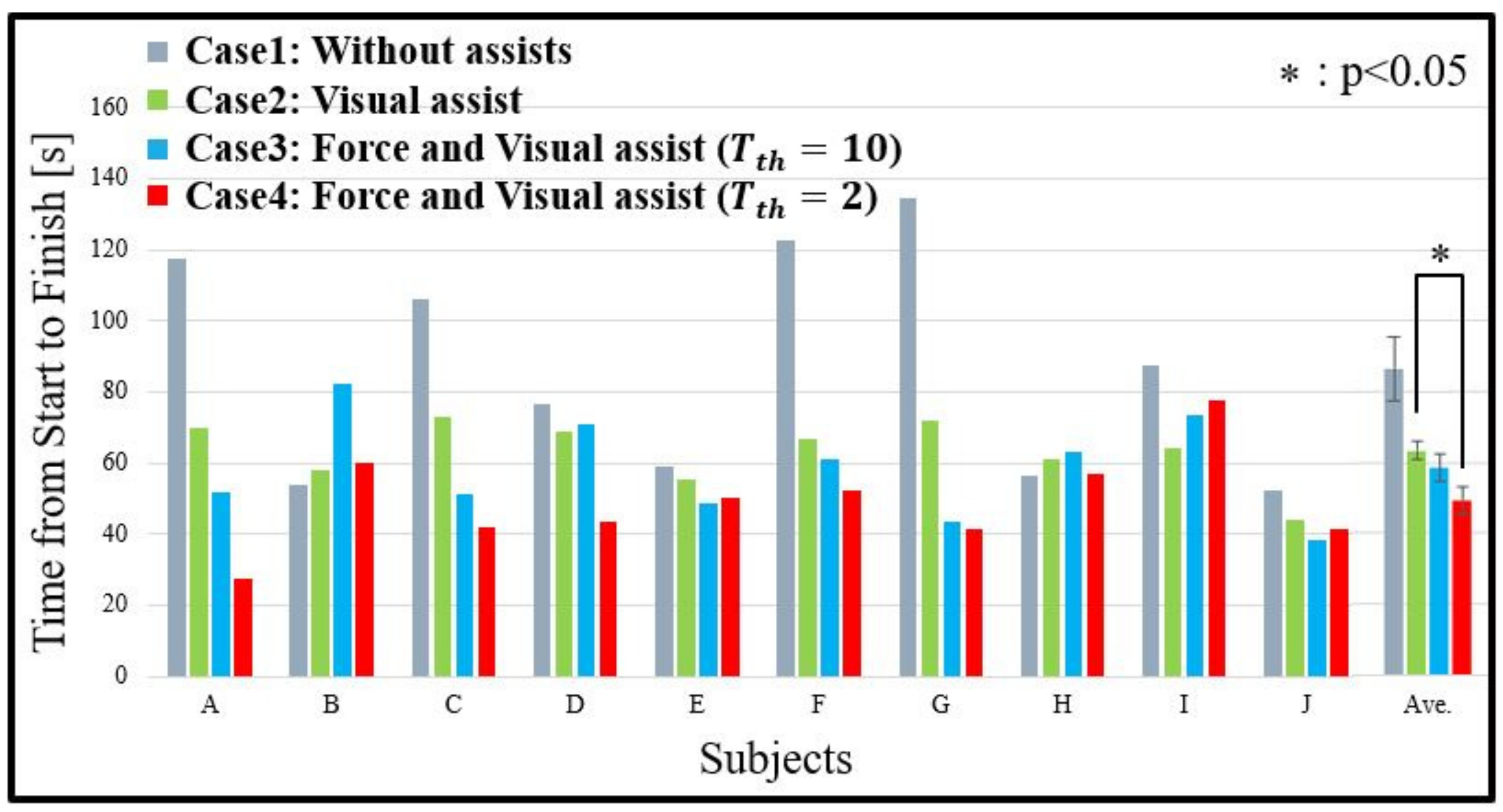
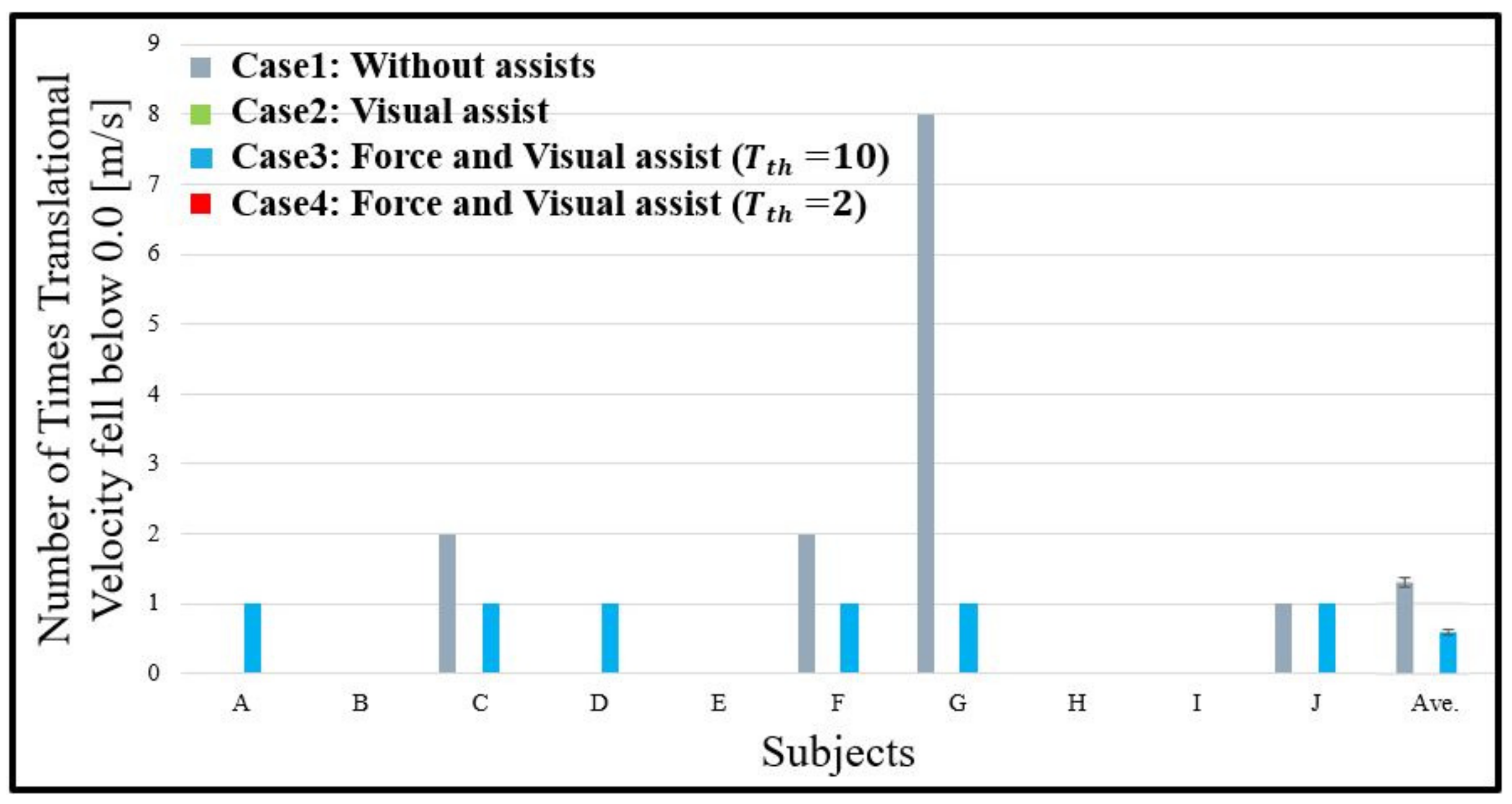
4.2. Experimental Results
- Time from start to finish;
- Number of times translational velocity fell below m/s;
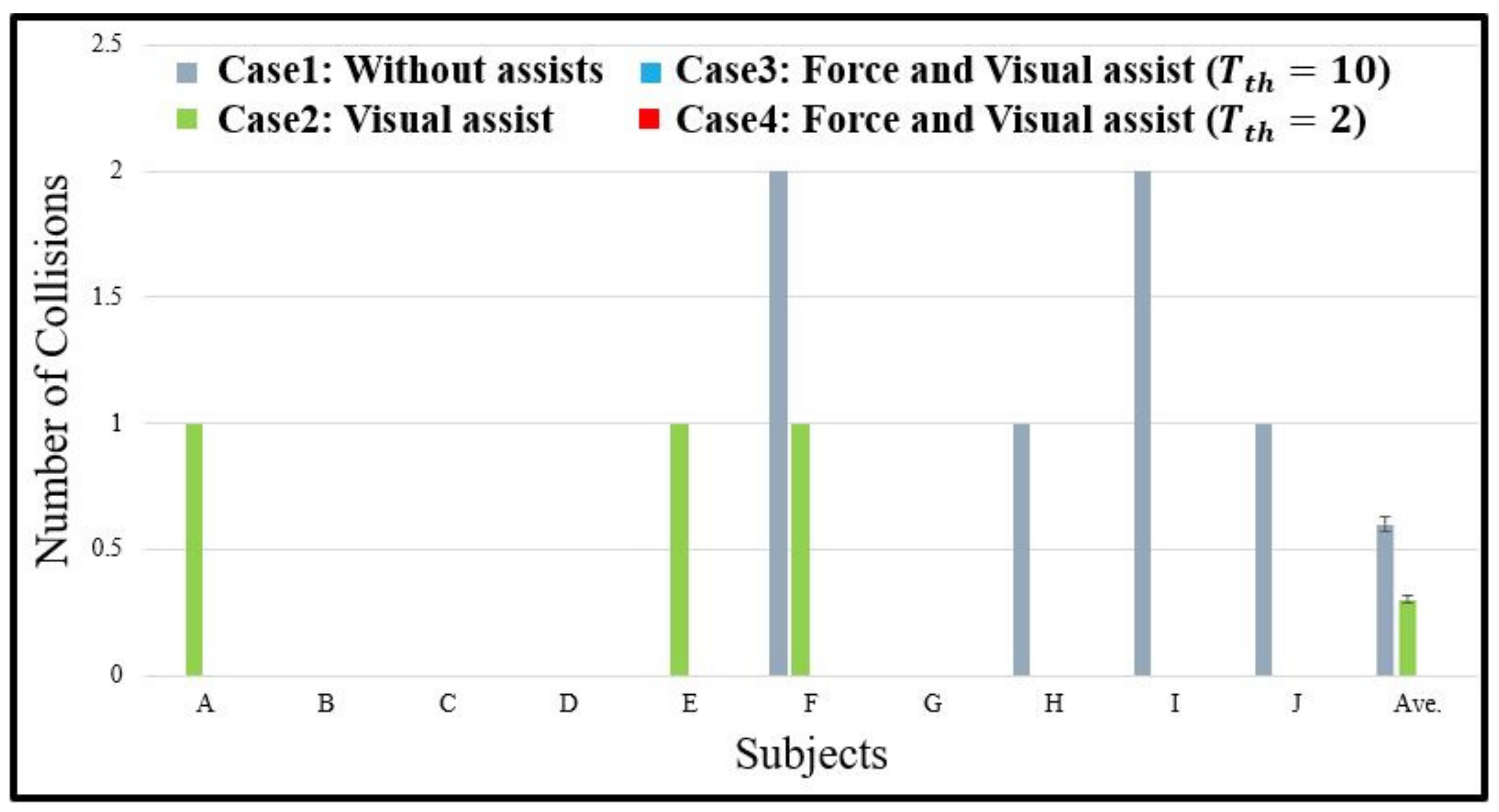
- Number of collisions.
4.2.1. Comparison between Case 1 and Case 2 for Evaluating the Visual Assist


4.2.2. Comparison between Case 3 and Case 4 for Evaluating the Presence of Force Assist
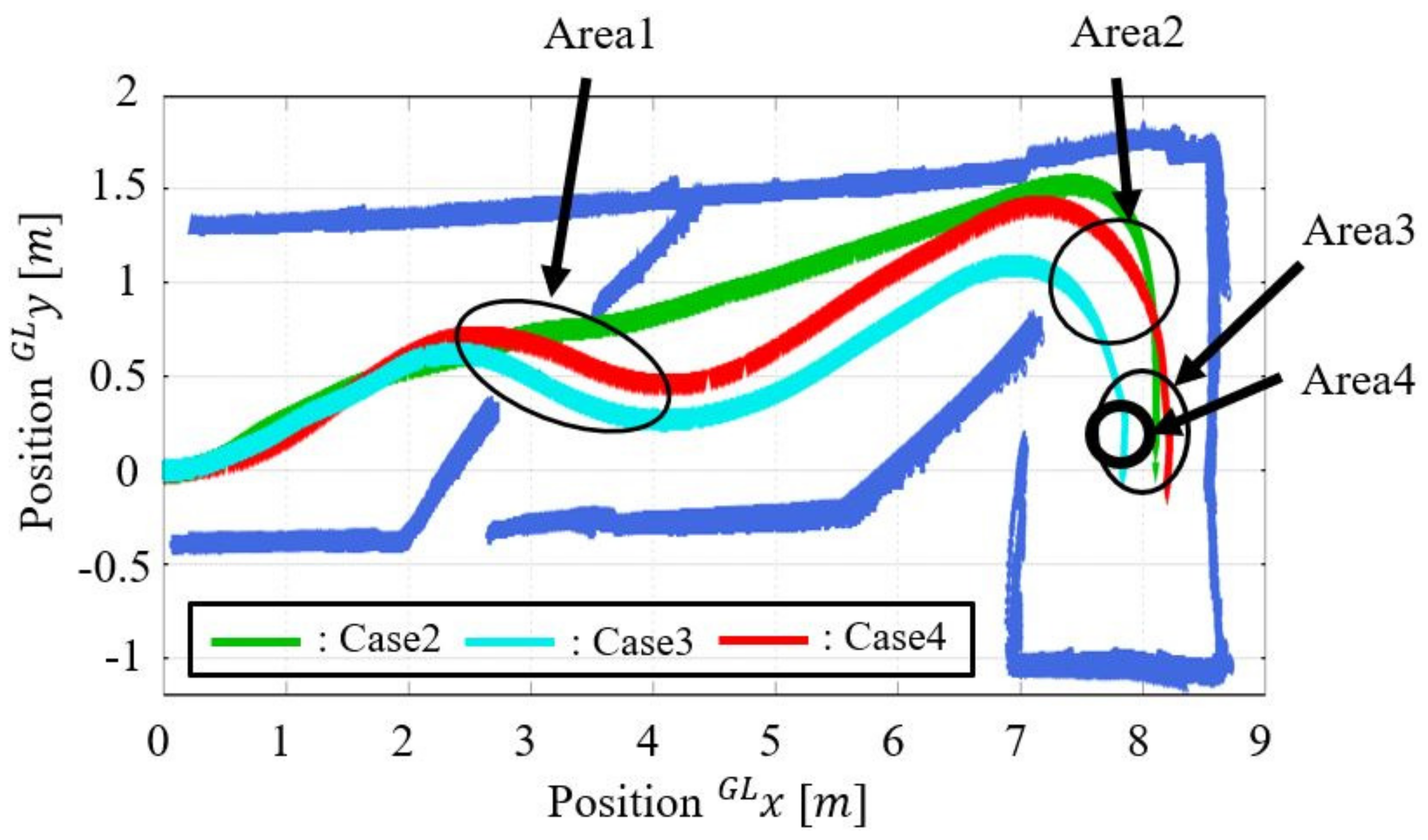
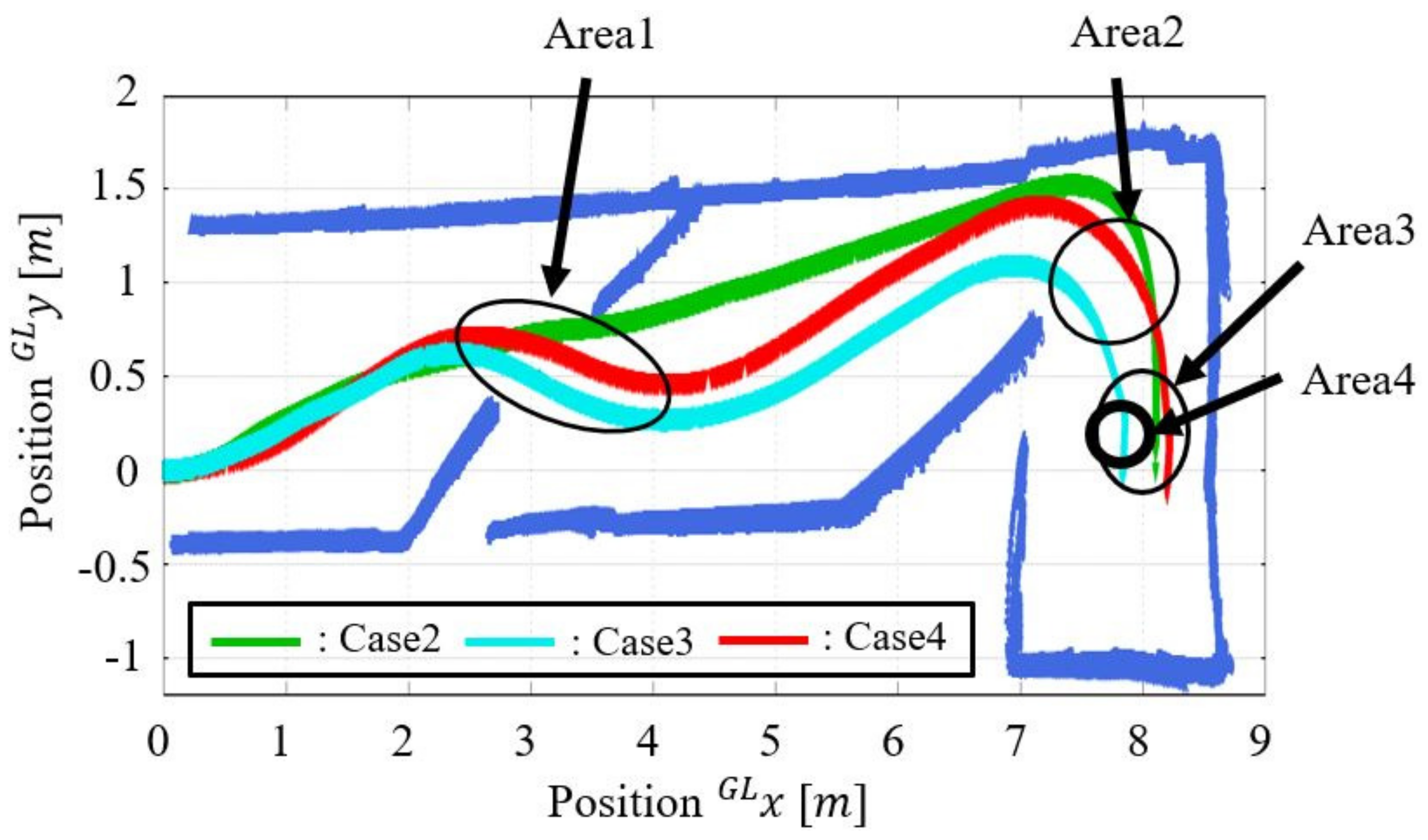
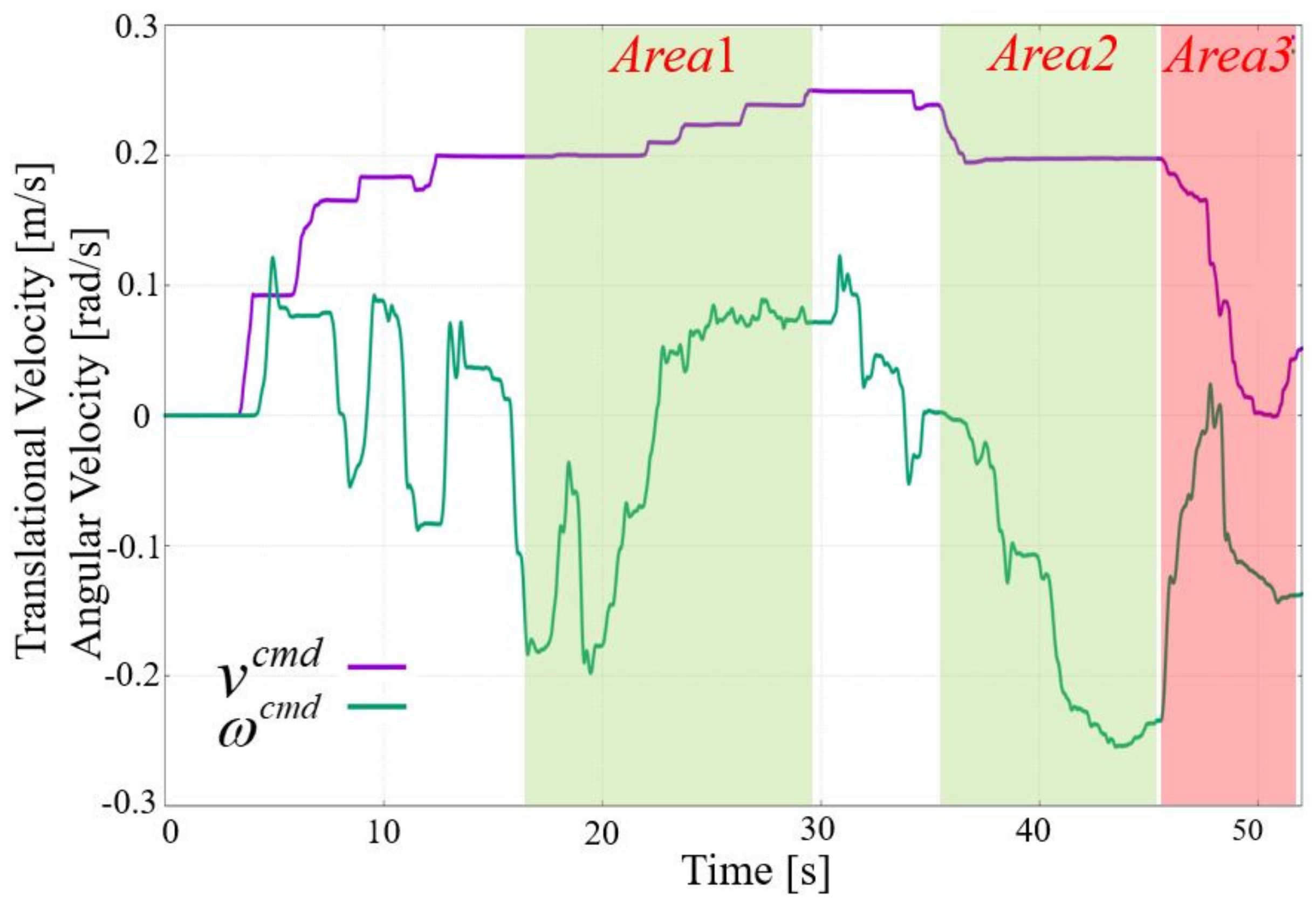
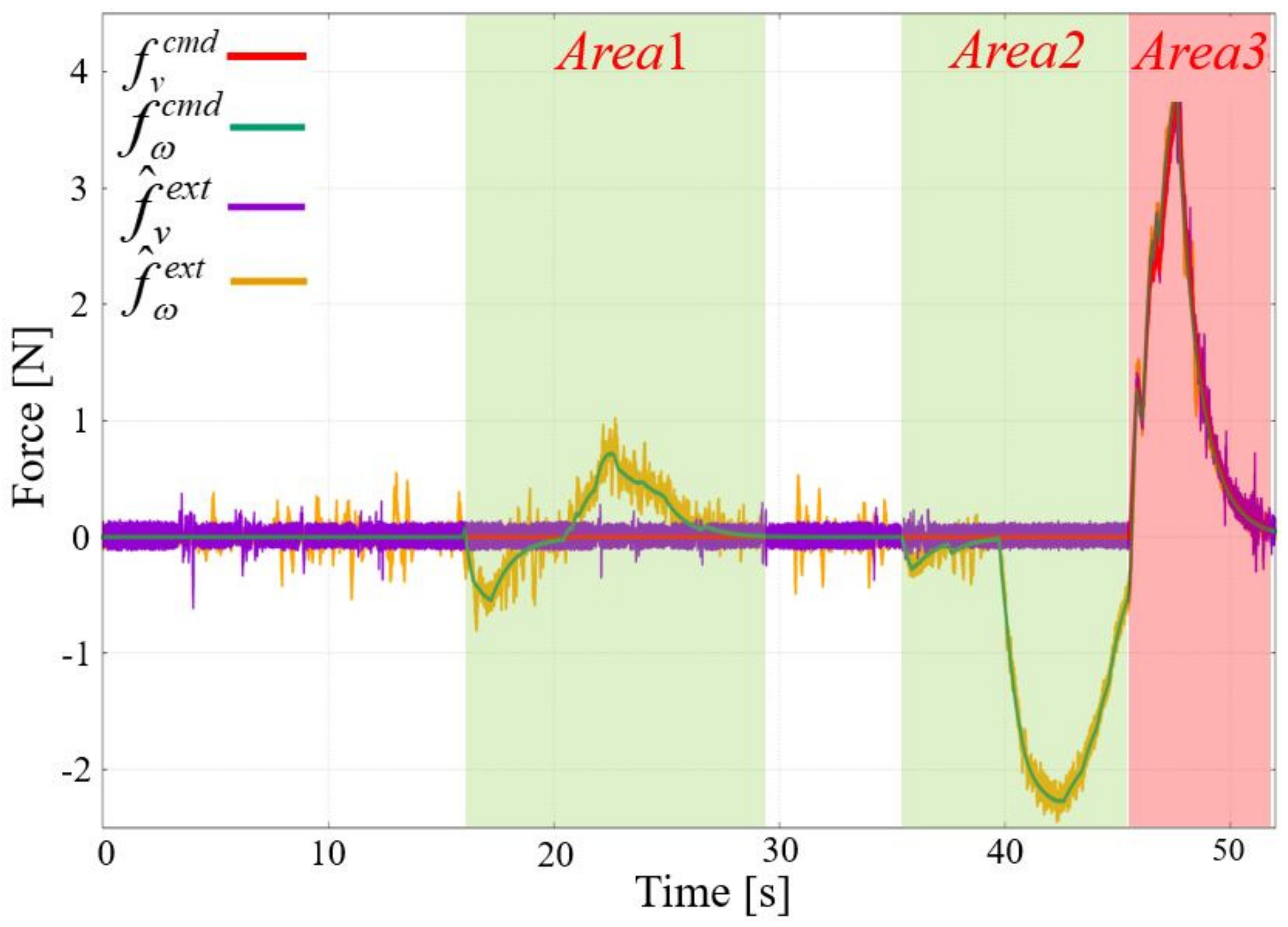
4.2.3. Comparison between Case 2 and Case 4 for Evaluating the Force and Visual Assists
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| TTC | Time to collision |
| LRF | Laser range finder |
| UDP | User datagram protocol |
| DOB | Disturbance observer |
| RFOB | Reaction force observer |
| LPF | Low-pass filter |
| RGB | Red, green, and blue |
References
- Yi, J.-B.; Kang, T.; Song, D.; Yi, S.-J. Unified Software Platform for Intelligent Home Service Robots. Appl. Sci. 2020, 10, 5874. [Google Scholar] [CrossRef]
- Ramalingam, B.; Elara Mohan, R.; Balakrishnan, S.; Elangovan, K.; Félix Gómez, B.; Pathmakumar, T.; Devarassu, M.; Mohan Rayaguru, M.; Baskar, C. sTetro-Deep Learning Powered Staircase Cleaning and Maintenance Reconfigurable Robot. Sensors 2021, 21, 6279. [Google Scholar] [CrossRef] [PubMed]
- Joon, A.; Kowalczyk, W. Design of Autonomous Mobile Robot for Cleaning in the Environment with Obstacles. Appl. Sci. 2021, 11, 8076. [Google Scholar] [CrossRef]
- Ruan, K.; Wu, Z.; Xu, Q. Smart Cleaner: A New Autonomous Indoor Disinfection Robot for Combating the COVID-19 Pandemic. Robotics 2021, 10, 87. [Google Scholar] [CrossRef]
- Dworakowski, D.; Thompson, C.; Pham-Hung, M.; Nejat, G. A Robot Architecture Using ContextSLAM to Find Products in Unknown Crowded Retail Environments. Robotics 2021, 10, 110. [Google Scholar] [CrossRef]
- Kim, H.; Choi, Y. Autonomous Driving Robot That Drives and Returns along a Planned Route in Underground Mines by Recognizing Road Signs. Appl. Sci. 2021, 11, 10235. [Google Scholar] [CrossRef]
- Skoczeń, M.; Ochman, M.; Spyra, K.; Nikodem, M.; Krata, D.; Panek, M.; Pawłowski, A. Obstacle Detection System for Agricultural Mobile Robot Application Using RGB-D Cameras. Sensors 2021, 21, 5292. [Google Scholar] [CrossRef]
- Wright, T.; West, A.; Licata, M.; Hawes, N.; Lennox, B. Simulating Ionising Radiation in Gazebo for Robotic Nuclear Inspection Challenges. Robotics 2021, 10, 86. [Google Scholar] [CrossRef]
- Wang, S.; Wang, L.; He, X.; Cao, Y. A Monocular Vision Obstacle Avoidance Method Applied to Indoor Tracking Robot. Drones 2021, 5, 105. [Google Scholar] [CrossRef]
- Shamsfakhr, F.; Motroni, A.; Palopoli, L.; Buffi, A.; Nepa, P.; Fontanelli, D. Robot Localisation Using UHF-RFID Tags: A Kalman Smoother Approach. Sensors 2021, 21, 717. [Google Scholar] [CrossRef]
- Filipescu, A.; Ionescu, D.; Filipescu, A.; Mincă, E.; Simion, G. Multifunctional Technology of Flexible Manufacturing on a Mechatronics Line with IRM and CAS, Ready for Industry 4.0. Processes 2021, 9, 864. [Google Scholar] [CrossRef]
- Zheng, Y.; Brudnak, J.M.; Jayakumar, P.; Stein, L.J.; Ersal, T. Evaluation of a Predictor-Based Framework in High-Speed Teleoperated Military UGVs. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 561–572. [Google Scholar] [CrossRef]
- Zhu, S.; Xiong, G.; Chen, H.; Gong, J. Guidance Point Generation-Based Cooperative UGV Teleoperation in Unstructured Environment. Sensors 2021, 21, 2323. [Google Scholar] [CrossRef] [PubMed]
- Tsunoda, M.; Premachandra, C. Remote Control of a Wheeled Robot by Visible Light for Support in Infectious Disease Hospitals. IEEE Access 2021, 9, 124165–124175. [Google Scholar] [CrossRef]
- Paparizos, C.; Tsafas, N.; Birbas, M. A Zynq-Based Robotic System for Treatment of Contagious Diseases in Hospital Isolated Environment. Technologies 2020, 8, 28. [Google Scholar] [CrossRef]
- Barzilov, A.; Kazemeini, M. Dual-Mode Radiation Sensor for UAS Platforms. Proceedings 2020, 42, 37. [Google Scholar] [CrossRef] [Green Version]
- Sankar, S.; Tsai, C.-Y. ROS-Based Human Detection and Tracking from a Wireless Controlled Mobile Robot Using Kinect. Appl. Syst. Innov. 2019, 2, 5. [Google Scholar] [CrossRef] [Green Version]
- Pati, C.S.; Kala, R. Vision-Based Robot Following Using PID Control. Technologies 2017, 5, 34. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.; Lin, Z.; Li, Y.; Yang, C. A Teleoperation Framework for Mobile Robots Based on Shared Control. IEEE Robot. Autom. Lett. 2020, 5, 2–377. [Google Scholar] [CrossRef] [Green Version]
- Clotet, E.; Martínez, D.; Moreno, J.; Tresanchez, M.; Palacín, J. Assistant Personal Robot (APR): Conception and Application of a Tele-Operated Assisted Living Robot. Sensors 2016, 16, 610. [Google Scholar] [CrossRef] [Green Version]
- Novák, P.; Kot, T.; Babjak, J.; Konečný, Z.; Moczulski, W.; Rodriguez López, Á. Implementation of Explosion Safety Regulations in Design of a Mobile Robot for Coal Mines. Appl. Sci. 2018, 8, 2300. [Google Scholar] [CrossRef] [Green Version]
- Veiga Almagro, C.; Lunghi, G.; Di Castro, M.; Centelles Beltran, D.; Marín Prades, R.; Masi, A.; Sanz, P.J. Cooperative and Multimodal Capabilities Enhancement in the CERNTAURO Human–Robot Interface for Hazardous and Underwater Scenarios. Appl. Sci. 2020, 10, 6144. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, J.; Zhao, F.; Liu, Y. A Search-and-Rescue Robot System for Remotely Sensing the Underground Coal Mine Environment. Sensors 2017, 17, 2426. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dong, Y.; Chopra, N. Passivity-Based Bilateral Tele-Driving System with Parametric Uncertainty and Communication Delays. IEEE Control Syst. Lett. 2019, 3, 350–355. [Google Scholar] [CrossRef]
- Wu, Y.; Balatti, P.; Lorenzini, M.; Zhao, F.; Kim, W.; Ajoudani, A. A Teleoperation Interface for Loco-Manipulation Control of Mobile Collaborative Robotic Assistant. IEEE Robot. Autom. Lett. 2019, 4, 3593–3600. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Yang, C.; Liu, X.; Li, Z. A Teleoperated Shared Control Scheme for Mobile Robot Based sEMG. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 288–293. [Google Scholar] [CrossRef]
- Masaki, R.; Motoi, N. Remote Control Method With Force Assist Based on Time to Collision for Mobile Robot. IEEE Open J. Ind. Electron. Soc. 2020, 1, 157–165. [Google Scholar] [CrossRef]
- Khurshid, P.R.; Fitter, T.N.; Fedalei, A.E.; Kuchenbecker, J.K. Effects of Grip-Force, Contact, and Acceleration Feedback on a Teleoperated Pick-and-Place Task. IEEE Trans. Haptics 2017, 10, 40–53. [Google Scholar] [CrossRef]
- Aggravi, M.; Pacchierotti, C.; Giordano, R.P. Connectivity-Maintenance Teleoperation of a UAV Fleet With Wearable Haptic Feedback. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1243–1262. [Google Scholar] [CrossRef]
- Rute, L.; José, C.; Laurent, G.; Frédéric, G.; José, L.S.; Rodrigo, V. On the Use of Haptic Tablets for UGV Teleoperation in Unstructured Environments: System Design and Evaluation. IEEE Access 2019, 7, 95443–95454. [Google Scholar] [CrossRef]
- Chandan, K.; Xiaohan, Z.; John, D.A.; Xiaoyang, Z.; Yao, L.; Shiqi, Z. Guided 360-Degree Visual Perception for Mobile Telepresence Robots. In Proceedings of the RSS—2020 Workshop on Closing the Academia to Real-World Gap in Service Robotics, Corvallis, OR, USA, 13 July 2020. [Google Scholar]
- Chao, C.-T.; Chung, M.-H.; Chiou, J.-S.; Wang, C.-J. A Simple Interface for 3D Position Estimation of a Mobile Robot with Single Camera. Sensors 2016, 16, 435. [Google Scholar] [CrossRef] [Green Version]
- Lunghi, G.; Marin, R.; Castro, D.M.; Masi, A.; Sanz, J.P. Multimodal Human-Robot Interface for Accessible Remote Robotic Interventions in Hazardous Environments. IEEE Access 2019, 7, 127290–127319. [Google Scholar] [CrossRef]
- Kružić, S.; Musić, J.; Stančić, I. Influence of human-computer interface elements on performance of teleoperated mobile robot. In Proceedings of the 2017 40th International Convention on Information and Communication Technology Electronics and Microelectronics (MIPRO), Opatija, Croatia, 22–26 May 2017; pp. 1015–1020. [Google Scholar] [CrossRef]
- Hidaka, K.; Saito, N. Development of Operation Assist System for Remote Control of A Mobile Robot. In Proceedings of the 2018 12th France-Japan and 10th Europe-Asia Congress on Mechatronics, Tsu, Japan, 10–12 September 2018; pp. 407–410. [Google Scholar] [CrossRef]
- T-Frog Project. Available online: http://t-frog.com/ (accessed on 13 October 2021).
- HOKUYO AUTOMATIC CO., LTD. Available online: http://www.hokuyo-aut.co.jp/ (accessed on 13 October 2021).
- Ohnishi, K.; Shibata, M.; Murakami, T. Motion Control for Advanced Mechatronics. IEEE/ASME Trans. Mechatron. 1996, 1, 56–67. [Google Scholar] [CrossRef]
- Murakami, T.; Yu, F.; Ohnishi, K. Torque Sensorless Control in Multidegree-of-Freedom Manipulator. IEEE Trans. Ind. Electron 1993, 40, 259–265. [Google Scholar] [CrossRef]
- Huang, Y. A Switched Approach to Image-Based Stabilization for Nonholonomic Mobile Robots with Field-of-View Constraints. Appl. Sci. 2021, 11, 10895. [Google Scholar] [CrossRef]
- ISO22324; Societal Security—Emergency Management—Guidelines for Colour-Coded Alerts. ISO: Geneva, Switzerland, 2015. Available online: https://www.iso.org/standard/50061.html (accessed on 16 February 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Descriptions | Values |
|---|---|---|
| Maximum translational velocity | (m/s) | |
| Minimum translational velocity | (m/s) | |
| Maximum angular velocity | (rad/s) | |
| Minimum angular velocity | (rad/s) | |
| Maximum translational acceleration | ||
| Maximum angular acceleration | ||
| Half width of mobile robot | (m) | |
| Diameter of wheel | (m) | |
| H | Height of mobile robot | (m) |
| Parameters | Descriptions | Values |
|---|---|---|
| Translational force feedback gain | ||
| Angular force feedback gain | ||
| Collision-free operating range | (m) | |
| P | Number of trajectories for searching | 21 |
| Time threshold for safe operation | (s) (Case 3) | |
| (s) (Case 4) | ||
| Cut-off frequency of force command | (rad/s) | |
| Maximum time to collision | (s) | |
| Maximum number of dots | 50 | |
| Lens distortion for x-axis | ||
| Lens distortion for y-axis | ||
| Focal length of camera | (mm) | |
| Center point of monitor for U-axis | (px) | |
| Center point of monitor for V-axis | (px) | |
| Color gain of gradation to increase intensity | ||
| Color gain of gradation to decrease intensity | ||
| Resolution gain of gradation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masaki, R.; Kobayashi, M.; Motoi, N. Remote-Controlled Method with Force and Visual Assists Based on Time to Collision for Mobile Robot. Appl. Sci. 2022, 12, 3727. https://doi.org/10.3390/app12083727
Masaki R, Kobayashi M, Motoi N. Remote-Controlled Method with Force and Visual Assists Based on Time to Collision for Mobile Robot. Applied Sciences. 2022; 12(8):3727. https://doi.org/10.3390/app12083727
Chicago/Turabian StyleMasaki, Ryo, Masato Kobayashi, and Naoki Motoi. 2022. "Remote-Controlled Method with Force and Visual Assists Based on Time to Collision for Mobile Robot" Applied Sciences 12, no. 8: 3727. https://doi.org/10.3390/app12083727
APA StyleMasaki, R., Kobayashi, M., & Motoi, N. (2022). Remote-Controlled Method with Force and Visual Assists Based on Time to Collision for Mobile Robot. Applied Sciences, 12(8), 3727. https://doi.org/10.3390/app12083727