
Planning of High-Power Charging Stations for Electric Vehicles: A Review




Abstract
:1. Introduction
- Is there a need for en-route fast charging?
- Would the uptake of EVs benefit from more fast chargers?
Contributions and Structure
- An extensive, state-of-the-art review of the literature concerning the planning of charging infrastructure for EVs;
- An in-depth categorization of studies analyzing which factors are important for different electrification targets;
- An overview of state-of-the-art methods for optimal sizing and allocation of high-power charging stations (HPCSs).
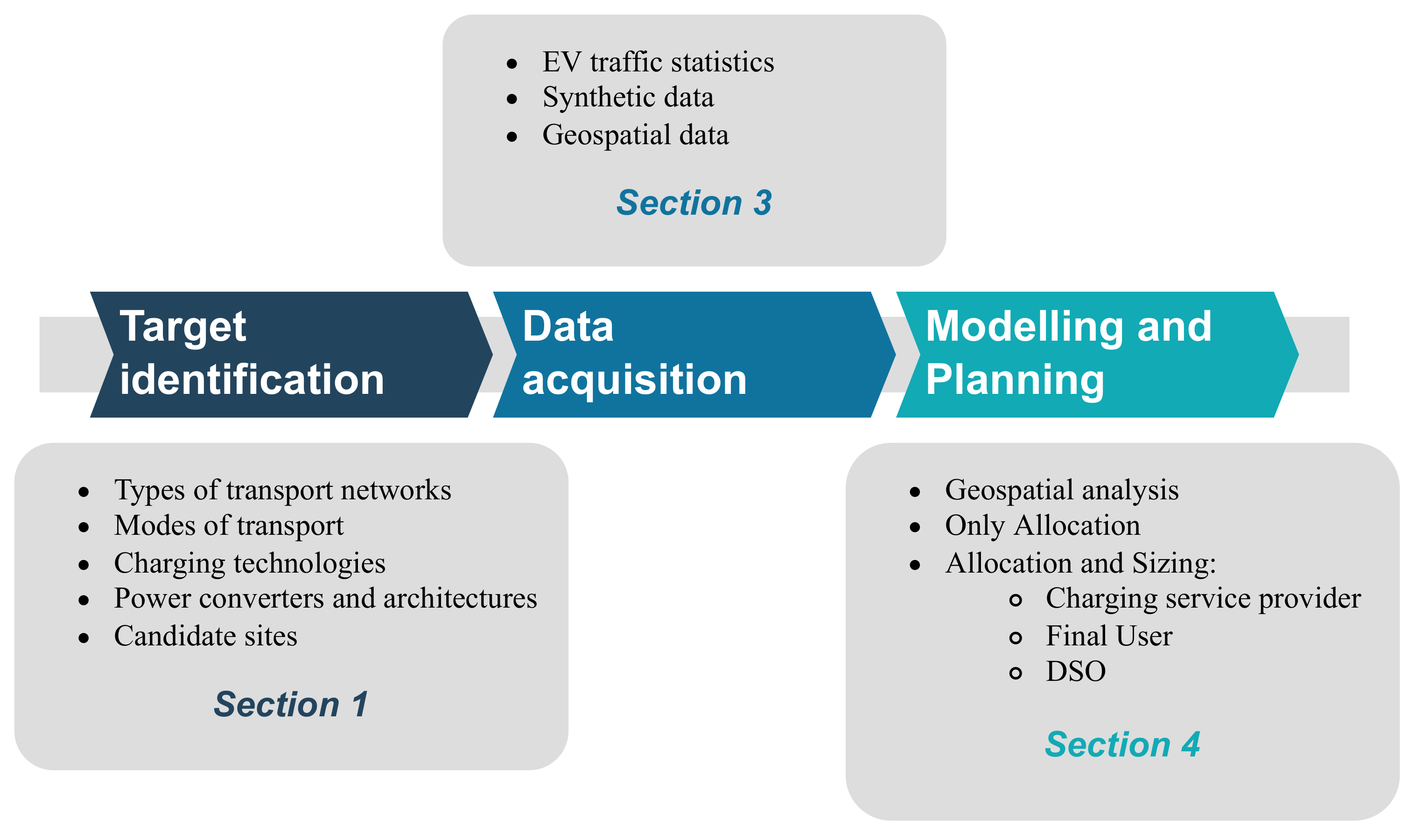
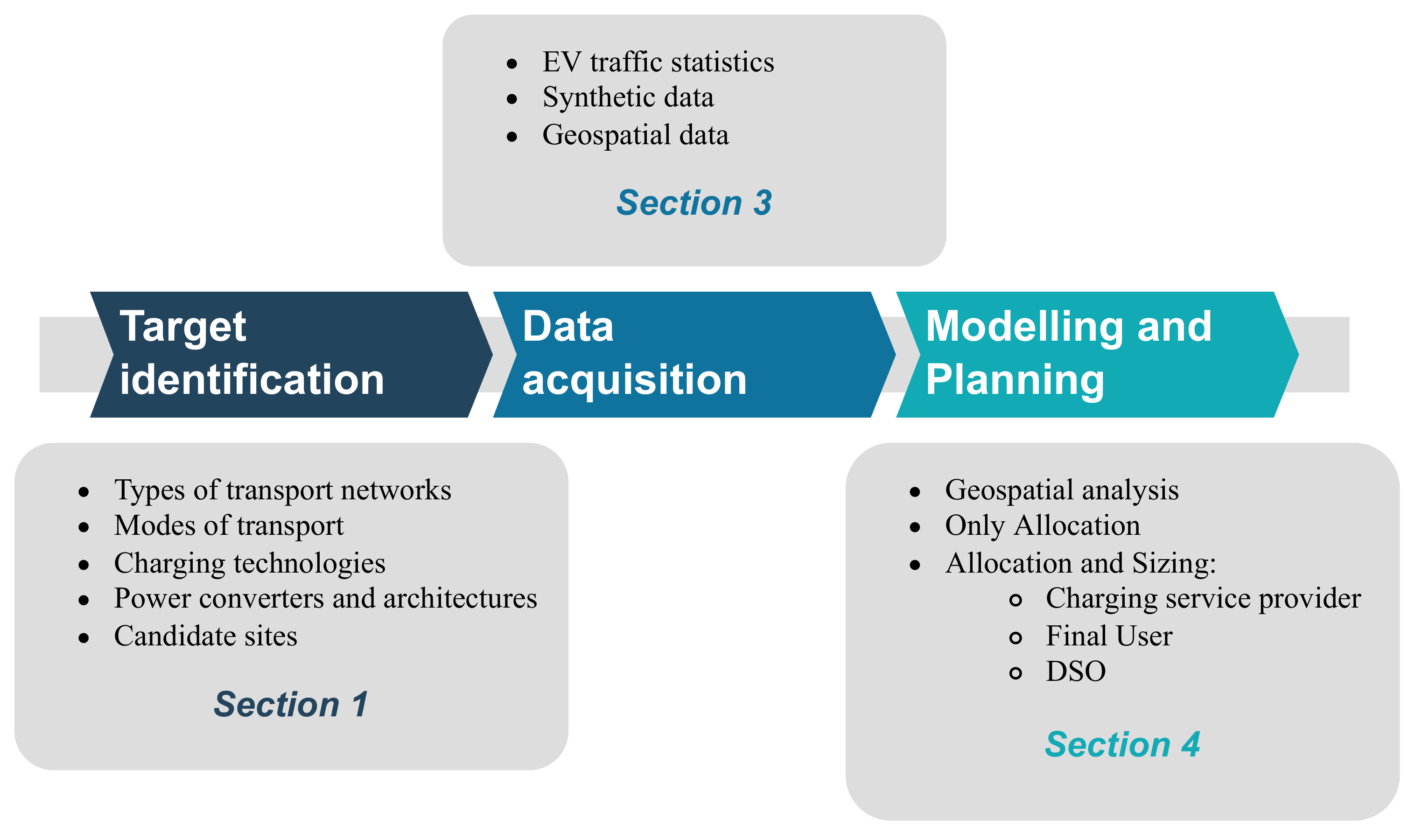
2. Target Identification
- What type of transport network is considered?
- Which modes of transport are included in the electrification strategy and which ones are neglected?
- Which charging technologies are implemented in the CI?
- Where and how are the candidate sites for CI selected?
2.1. Types of Transport Networks
2.1.1. Urban
2.1.2. Rural
2.1.3. Inter-City
2.1.4. Highways
2.2. Modes of Transport
- Deterministic vehicles are the ones for which the route, time of departure, and time of arrival are known beforehand. Electrification of these vehicles means that it is possible to predict where the charging cycle takes place and characterize the charging demand with small error (in terms of energy and power). Buses and ferries are examples of deterministic vehicles.
- Probabilistic vehicles include vehicles for which route and time of departure and arrival do not follow a fixed routine or schedule. To calculate charging demand of probabilistic electric vehicles, probabilistic models (such as Monte Carlo simulations) need to be applied in order to consider the random behaviour of users. Electric passenger cars and bicycles are examples of probabilistic vehicles.
2.2.1. Passenger Vehicles
2.2.2. Buses
2.2.3. Taxis
2.2.4. Heavy-Duty Vehicles
2.2.5. Autonomous and Shared Vehicles Fleet
2.2.6. Ships
2.3. Charging Technologies
2.3.1. Plug-in Charging
- Level: the power output of the outlet.
- Type: socket, connector, and standards.
- Mode: the communication protocol.
2.3.2. Battery Swapping
2.3.3. Inductive Charging
2.3.4. Interoperability Issues
- Mismatch of the hardware interfaces;
- Multiple versions of different protocols covering the same communication link;
- Low level of standardization between high level actors.
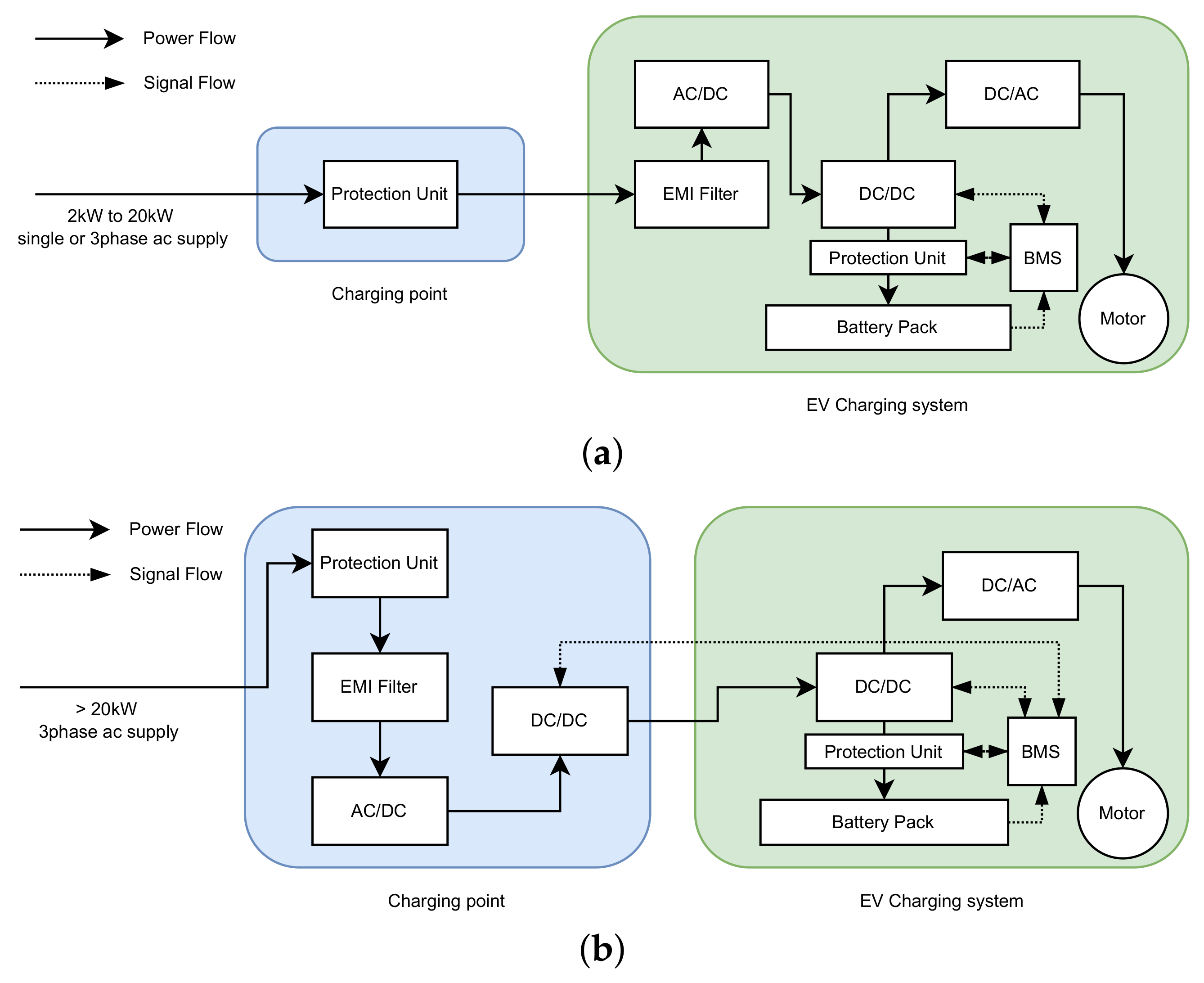
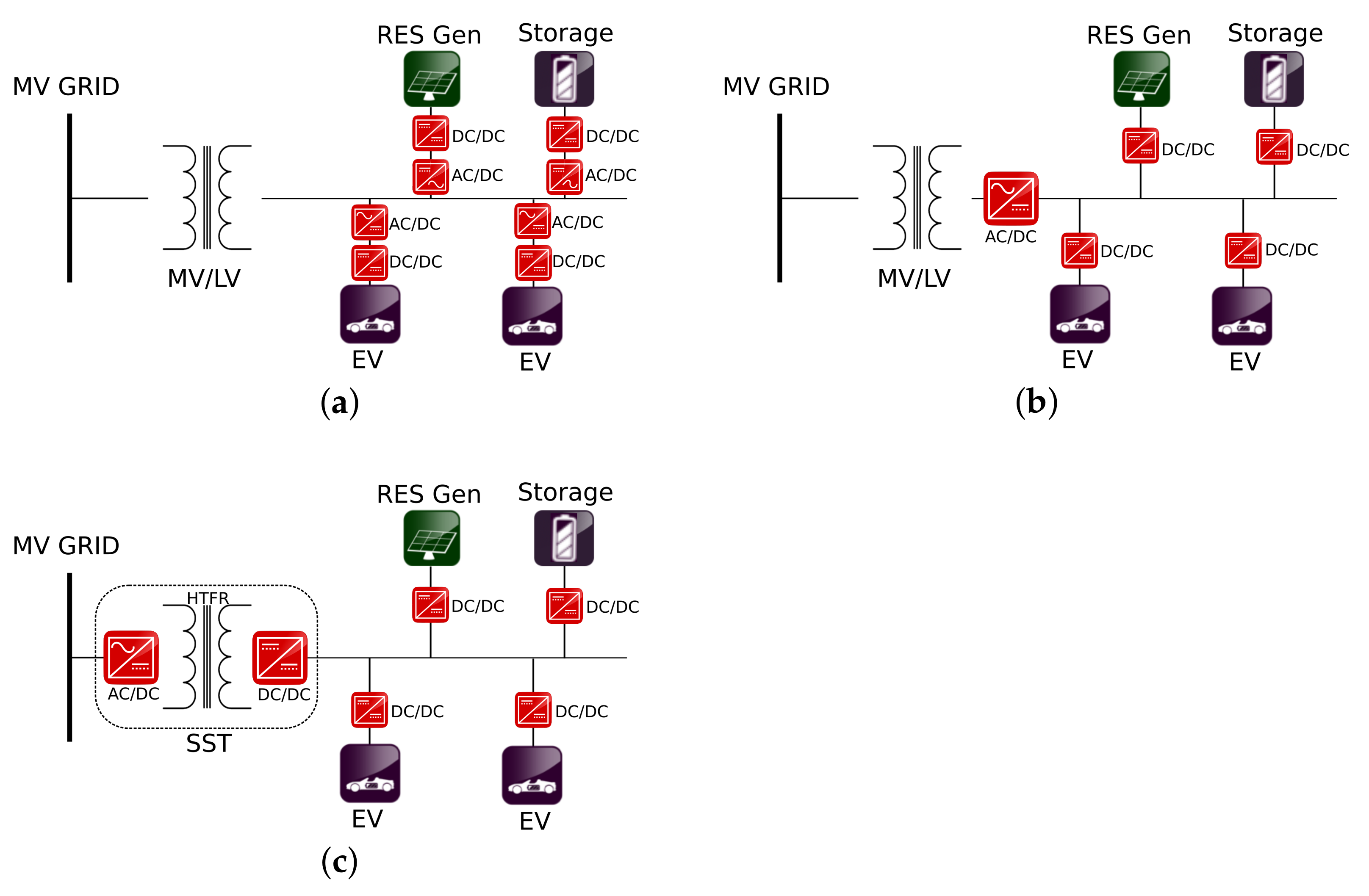
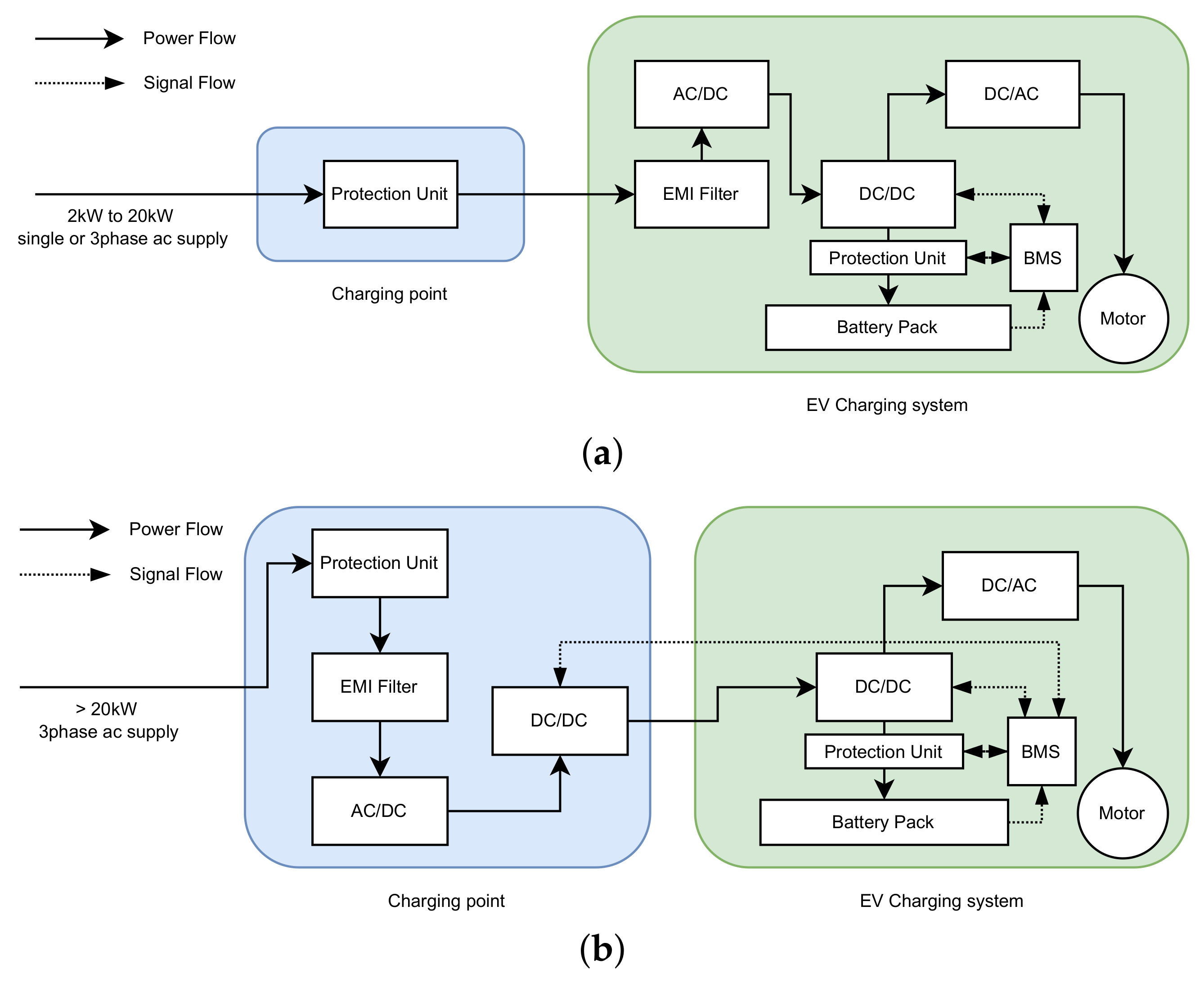
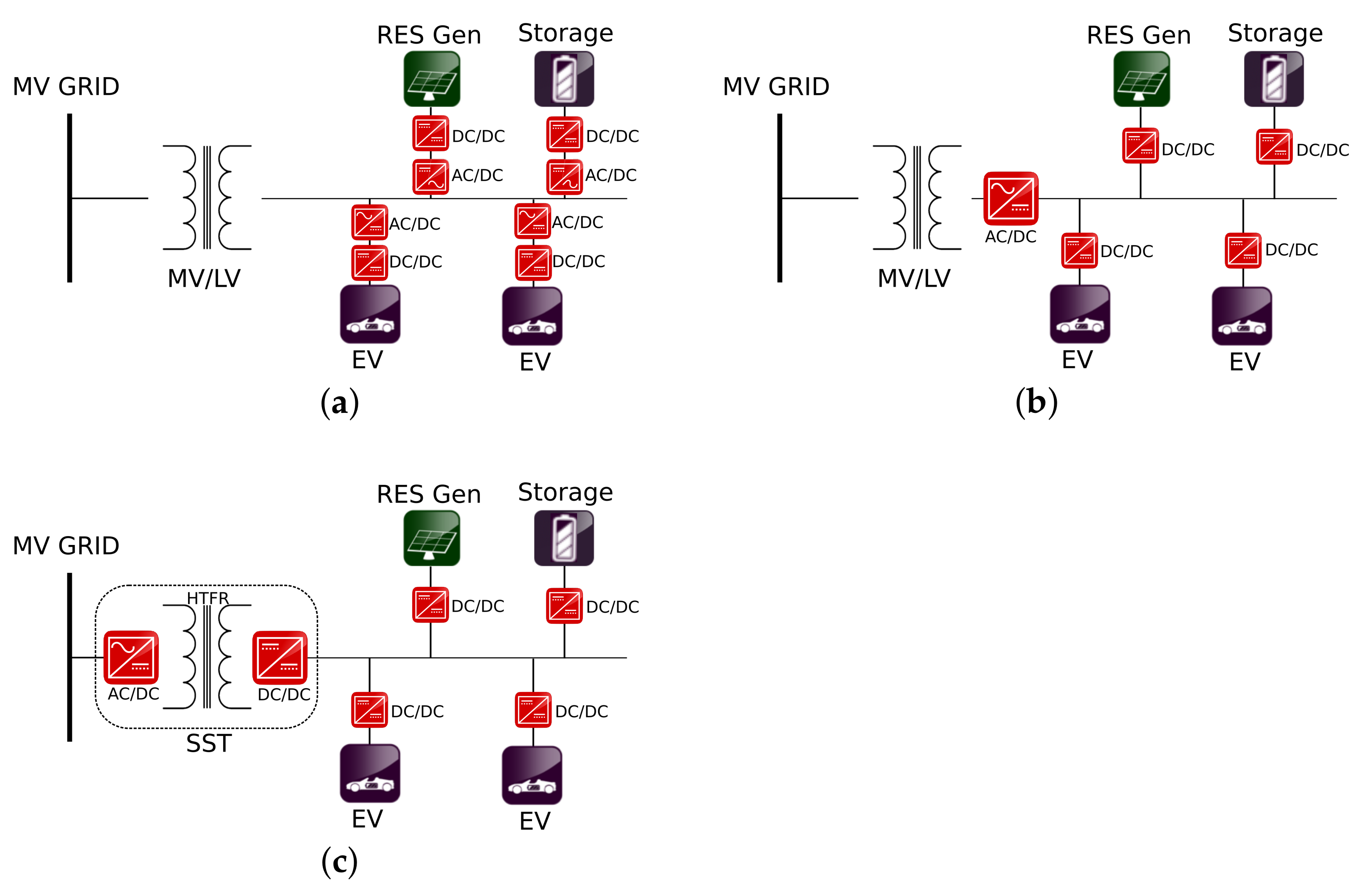
2.4. Power Converters and Architectures
2.5. Candidate Sites
3. Data Acquisition
3.1. Data Categories
- Transport network data: characterizes different aspects of transport infrastructures depending on the studies’ application. This can include parking areas, existing gas stations, public transport stations, etc.
- Socio-economic data: including the type of neighborhood to be served (industrial, residential, etc.), GDP, EV ownership, etc.
- Electric system data: including geo-spatial data of the electric power system, the characteristics of the substations and the cablings, and the parameters that characterize the operations of the system. Modelling of the power system is implemented to assess the impacts of the charging demand on the distribution system.
- Traffic data: extracted from GPS data to register the time of vehicles’ successive positions or from stations that assess passing vehicles through a particular point of measurement. Origin–destination (O–D) data can also be used effectively when coupled with timestamps or even activity-based labelling of trips.
3.2. Model- and Data-Driven
4. Modelling and Planning
- Controlled charging: in [129], the authors investigate controlled charging strategies based on price sensitivity, where the PHEV users can decide whether to charge the vehicle, offering some benefits in terms of social acceptability and charging control penetration. The research concludes that few economic benefits can be derived out of V2G for PHEV users.
4.1. Geospatial Analysis
4.2. Optimization
4.2.1. Only Allocation
4.2.2. Allocation and Sizing
4.2.3. Charging Service Provider Oriented Planning
- CS Investment Costs: present in most of the cases.
- Installation Costs: in [52], the authors vary whether the CS is located at an existing gas station. Installation is found to include raw material, an added line to connect CSs to the power grid, etc.
- Penalty Costs: the cost of applying demand response programs, as in [24].
4.2.4. Final User Oriented Planning
- Overall Downtime: this generally consists of charging, traveling, and waiting time. It is used in multi-objective optimizations [23,52] or as the only decision variable, as in [48]. Study [56] calculates that solutions with higher quality of service (shorter waiting time) present significantly higher costs of the CI. Waiting time is counted as a cost in [21,43], calculated through the travel time cost extracted from a survey. In several studies, such as [82], downtime is calculated to assess the quality of the service (QoS) but is not included in the objective function.
- Charging Coverage: together with downtime, this is a critical parameter to ensure an optimal QoS of the CI and is a measure of user satisfaction [84]. In literature, the authors use different factors to quantify charging coverage, e.g., in [62], the factor is the number of charging EVs; in [22], the factor is inversely proportional to the distance between two adjacent CSs on the same road; and [38,133,134] aim to maximize the flow captured in their model-driven study. The authors of [81] decide to minimize the overall number of charging locations without compromising the coverage of the trajectories in the mobility scenario. However, they do not take into account any costs in their optimization procedure.
4.2.5. DSO-Oriented Planning
- Grid Expansion Costs: these are evaluated in few articles: [84] includes substation expansions (power dependent) and feeder upgrades (length and power dependent).
- Energy Losses: many studies include losses in the electric network [25,32,53,58,59,60,61,63] due to charging-discharging behavior. This factor is usually counted as a cost through electricity price ([61]), but also as energy units, as in [55], which implemented a multi-objective optimization. In contrast, the authors of [65] make use of three indices to maximize the power quality, minimize active and reactive power losses, and finally impose a penalty on substantial voltage deviations. However, it should be noted that economic losses due to an added charging demand of EVs in the electric system do not translate into a significant change in the cost function.
4.3. Distributed Energy Resources
5. Socio-Economic and Environmental Impacts
6. Discussion and Future Research Scope
- Model-driven approaches are assessed to be preferred: the authors believe that further use of real data could produce more accurate results to help investors achieve a more optimal development of CI and enable regulators to produce policies that aim for sustainable mobility scenarios.
- There is a strong focus on the urban context for electrification. To the best knowledge of the authors, only one study produces an AS strategy for rural areas. More research is needed in this field, especially due to the divergent conditions between rural and urban regions.
- Only a limited number of studies analyzed the electrification of highway networks. In particular, a profitability assessment of HPCS in large transport systems is missing, especially in terms of optimized number, location, and size [13].
- There is a lack of studies that investigate how to plan electrification for heavy duty vehicles (HDV)s. Although the European Parliament is setting short-term targets on new HDV fleets [151], there is not a solid scientific basis for the best practices to supply this mode of transport.
- Land: as in Section 4.2.3, it was highlighted as one of the most influential parameters for cost estimation of CI planning, but more analysis could be developed on the revenues generated by areas designated to EV charging compared to other final uses.
- Policies: the present review article did not include current and future trends in policies, barriers, and threats on charging infrastructure development and other factors that could enhance the uptake of EVs. For example, V2G and V2X regulation could decrease operational cost for grid operators and final users (especially when in combination with V2B applications), and we suggest future investigation on the scope.
- Future trends: more research must be developed to take into account trends such as ownership-to-service, shared vehicles, technological advancements of electrical scooters, and autonomous vehicles, etc. In this regard, autonomous vehicle technologies and shared mobility are predicted to complement each other in the future of transportation with positive feedback loops [73,121,152]. However, to the best knowledge of the authors, no studies have assessed AS coupling automotive EVs offering car-sharing services.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hensley, R.; Newman, J.; Rogers, M. Battery technology charges ahead. In McKinsley Quarterly; McKinsey & Company: Minato, Tokyo, 2012. [Google Scholar]
- Yu, S. The planning system of charging network. AIP Conf. Proc. 2019, 2019, 020041. [Google Scholar]
- Csiszár, C.; Csonka, B.; Földes, D.; Wirth, E.; Lovas, T. Urban public charging station locating method for electric vehicles based on land use approach. J. Transp. Geogr. 2019, 74, 173–180. [Google Scholar] [CrossRef]
- C40 Cities Climate Leadership Group. How to Drive a Modal Shift from Private Vehicle Use to Public Transport, Walking and Cycling. 2019. Available online: https://www.c40knowledgehub.org/s/article/How-to-drive-a-modal-shift-from-private-vehicle-use-to-public-transport-walking-and-cycling (accessed on 1 January 2021).
- UNFCCC. The Paris Declaration on Electro-Mobility and Climate Change and Call to Action. 2015. Available online: https://unfccc.int/news/the-paris-declaration-on-electro-mobility-and-climate-change-and-call-to-action (accessed on 1 December 2021).
- London City Hall. Mayor’s Transport Strategy 2018|London City Hall. 2018. Available online: https://www.london.gov.uk/what-we-do/transport/our-vision-transport/mayors-transport-strategy-2018 (accessed on 1 December 2021).
- Ribeiro, S.K.; Kobayashi, S.; Beuthe, M. Transport and its infrastructure. In Contribution of Working Group III to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Technical Report, Climate Change 2007: Mitigation; Cambridge University Press: Cambridge, UK, 2007; Available online: https://archive.ipcc.ch/publications_and_data/ar4/wg3/en/contents.html (accessed on 1 December 2021).
- Jayasooriya, S.A.; Bandara, Y.M. Measuring the Economic costs of traffic congestion. In Proceedings of the 3rd International Moratuwa Engineering Research Conference, MERCon 2017, Moratuwa, Sri Lanka, 29–31 May 2017; pp. 141–146. [Google Scholar] [CrossRef]
- Kwan, S.C.; Hashim, J.H. A review on co-benefits of mass public transportation in climate change mitigation. Sustain. Cities Soc. 2016, 22, 11–18. [Google Scholar] [CrossRef]
- Shi, L.; Hao, Y.; Lv, S.; Cipcigan, L.; Liang, J. A comprehensive charging network planning scheme for promoting EV charging infrastructure considering the Chicken-Eggs dilemma. Res. Transp. Econ. 2020, 88, 100837. [Google Scholar] [CrossRef]
- Hardman, S.; Jenn, A.; Tal, G.; Axsen, J.; Beard, G.; Daina, N.; Figenbaum, E.; Jakobsson, N.; Jochem, P.; Kinnear, N.; et al. A review of consumer preferences of and interactions with electric vehicle charging infrastructure. Transp. Res. Part D Transp. Environ. 2018, 62, 508–523. [Google Scholar] [CrossRef] [Green Version]
- Gnann, T.; Funke, S.; Jakobsson, N.; Plötz, P.; Sprei, F.; Bennehag, A. Fast charging infrastructure for electric vehicles: Today’s situation and future needs. Transp. Res. Part D Transp. Environ. 2018, 62, 314–329. [Google Scholar] [CrossRef]
- Jochem, P.; Szimba, E.; Reuter-Oppermann, M. How many fast-charging stations do we need along European highways? Transp. Res. Part D Transp. Environ. 2019, 73, 120–129. [Google Scholar] [CrossRef]
- He, Y.; Kockelman, K.M.; Perrine, K.A. Optimal locations of U.S. fast charging stations for long-distance trip completion by battery electric vehicles. J. Clean. Prod. 2019, 214, 452–461. [Google Scholar] [CrossRef]
- Sæle, H.; Istad, M.K.; Garnås, S. The Benefit of Batteries in a Flexible Distribution Grid: Results from the FlexNett Project; Technical Report 2018; SINTEF Energi: Trondheim, Norway, 2018; Available online: https://www.researchgate.net/publication/344190930_The_benefit_of_batteries_in_a_flexible_distribution_grid_Results_from_the_FlexNett_project_Authors (accessed on 1 December 2021).
- CleanTech, N.M. The World’s First Ferry with Inductive Charging—NCE Maritime CleanTech. 2017. Available online: https://maritimecleantech.no/2017/09/26/worlds-first-ferry-inductive-charging/ (accessed on 1 December 2021).
- Global EV Outlook 2019; OECD: Paris, France, 2019. [CrossRef]
- Alnes, O.; Eriksen, S.; Vartdal, B.J. Battery-Powered Ships: A Class Society Perspective. IEEE Electrif. Mag. 2017, 5, 10–21. [Google Scholar] [CrossRef]
- ABB. Shore Power to Improve Air Quality and Reduce Noise in Port and City of Tallinn. Available online: https://new.abb.com/news/et/detail/38873/shore-power-to-improve-air-quality-and-reduce-noise-in-port-and-city-of-tallinn (accessed on 1 December 2019).
- Leeprechanon, N.; Phonrattanasak, P.; Sharma, M.K. Optimal planning of public fast charging station on residential power distribution system. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific, ITEC Asia-Pacific 2016, Busan, Korea, 1–4 June 2016; pp. 519–524. [Google Scholar] [CrossRef]
- Dong, X.; Mu, Y.; Jia, H.; Wu, J.; Yu, X. Planning of Fast EV Charging Stations on a Round Freeway. IEEE Trans. Sustain. Energy 2016, 7, 1452–1461. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Q.; Farnoosh, A.; Chen, S.; Li, Y. GIS-Based Multi-Objective Particle Swarm Optimization of charging stations for electric vehicles. Energy 2019, 169, 844–853. [Google Scholar] [CrossRef]
- Soma, G.G.; Pilo, F.; Conti, S. Multi-objective integrated planning of fast charging stations. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive, AEIT AUTOMOTIVE 2019, Turin, Italy, 2–4 July 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Simorgh, H.; Doagou-Mojarrad, H.; Razmi, H.; Gharehpetian, G.B. Cost-based optimal siting and sizing of electric vehicle charging stations considering demand response programmes. IET Gener. Transm. Distrib. 2018, 12, 1712–1720. [Google Scholar] [CrossRef]
- Pan, Z.J.; Zhang, Y. A novel centralized charging station planning strategy considering urban power network structure strength. Electr. Power Syst. Res. 2016, 136, 100–109. [Google Scholar] [CrossRef]
- Napoli, G.; Polimeni, A.; Micari, S.; Dispenza, G.; Antonucci, V. Optimal allocation of electric vehicle charging stations in a highway network: Part 2. The Italian case study. J. Energy Storage 2019, 26, 101015. [Google Scholar] [CrossRef]
- Kazemi, M.A.; Sedighizadeh, M.; Mirzaei, M.J.; Homaee, O. Optimal siting and sizing of distribution system operator owned EV parking lots. Appl. Energy 2016, 179, 1176–1184. [Google Scholar] [CrossRef]
- Mirzaei, M.J.; Kazemi, A.; Homaee, O. A Probabilistic Approach to Determine Optimal Capacity and Location of Electric Vehicles Parking Lots in Distribution Networks. IEEE Trans. Ind. Inform. 2016, 12, 1963–1972. [Google Scholar] [CrossRef]
- Li, S.; Huang, Y.; Mason, S.J. A multi-period optimization model for the deployment of public electric vehicle charging stations on network. Transp. Res. Part C Emerg. Technol. 2016, 65, 128–143. [Google Scholar] [CrossRef]
- Xie, F.; Liu, C.; Li, S.; Lin, Z.; Huang, Y. Long-term strategic planning of inter-city fast charging infrastructure for battery electric vehicles. Transp. Res. Part E Logist. Transp. Review 2018, 109, 261–276. [Google Scholar] [CrossRef]
- Graabak, I.; Wu, Q.; Warland, L.; Liu, Z. Optimal planning of the Nordic transmission system with 100% electric vehicle penetration of passenger cars by 2050. Energy 2016, 107, 648–660. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, K.; Shen, Z.J.M.; Ye, B.; Miao, L. Multistage large-scale charging station planning for electric buses considering transportation network and power grid. Transp. Res. Part C Emerg. Technol. 2019, 107, 423–443. [Google Scholar] [CrossRef]
- Aljaidi, M.; Aslam, N.; Kaiwartya, O. Optimal placement and capacity of electric vehicle charging stations in urban areas: Survey and open challenges. In Proceedings of the 2019 IEEE Jordan International Joint Conference on Electrical Engineering and Information Technology, Amman, Jordan, 9–11 April 2019; pp. 238–243. [Google Scholar] [CrossRef]
- Yıldız, B.; Olcaytu, E.; Şen, A. The urban recharging infrastructure design problem with stochastic demands and capacitated charging stations. Transp. Res. Part B Methodol. 2019, 119, 22–44. [Google Scholar] [CrossRef]
- Smart, J.; Schey, S. Battery electric vehicle driving and charging behavior observed early in the EV project. SAE Int. J. Altern. Powertrains 2012, 1, 27–33. [Google Scholar] [CrossRef] [Green Version]
- Hu, L.; Dong, J.; Lin, Z. Modeling charging behavior of battery electric vehicle drivers: A cumulative prospect theory based approach. Transp. Res. Part C Emerg. Technol. 2019, 102, 474–489. [Google Scholar] [CrossRef] [Green Version]
- Gkatzoflias, D.; Drossinos, Y.; Zubaryeva, A.; Zambelli, P.; Dilara, P.; Thiel, C.; Doi, E. Optimal Allocation of Electric Vehicle Charging Infrastructure in Cities and Regions; Technical Report; European Commission: Brussels, Belgium, 2016. [Google Scholar] [CrossRef]
- Wu, F.; Sioshansi, R. A stochastic flow-capturing model to optimize the location of fast-charging stations with uncertain electric vehicle flows. Transp. Res. Part D Transp. Environ. 2017, 53, 354–376. [Google Scholar] [CrossRef]
- Wei, R.; Liu, X.; Ou, Y.; Kiavash Fayyaz, S. Optimizing the spatio-temporal deployment of battery electric bus system. J. Transp. Geogr. 2018, 68, 160–168. [Google Scholar] [CrossRef]
- Napoli, G.; Polimeni, A.; Micari, S.; Andaloro, L.; Antonucci, V. Optimal allocation of electric vehicle charging stations in a highway network: Part 1. Methodology and test application. J. Energy Storage 2020, 27, 101102. [Google Scholar] [CrossRef]
- Wang, I.L.; Wang, Y.; Lin, P.C. Optimal recharging strategies for electric vehicle fleets with duration constraints. Transp. Res. Part C Emerg. Technol. 2016, 69, 242–254. [Google Scholar] [CrossRef]
- Xylia, M.; Leduc, S.; Patrizio, P.; Kraxner, F.; Silveira, S. Locating charging infrastructure for electric buses in Stockholm. Transp. Res. Part C Emerg. Technol. 2017, 78, 183–200. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Y.; Xu, J.; Barclay, N. Optimal recharging scheduling for urban electric buses: A case study in Davis. Transp. Res. Part E Logist. Transp. Rev. 2017, 100, 115–132. [Google Scholar] [CrossRef]
- Liu, Z.; Song, Z.; He, Y. Planning of Fast-Charging Stations for a Battery Electric Bus System under Energy Consumption Uncertainty. Transp. Res. Rec. 2018, 2672, 96–107. [Google Scholar] [CrossRef] [Green Version]
- Asamer, J.; Reinthaler, M.; Ruthmair, M.; Straub, M.; Puchinger, J. Optimizing charging station locations for urban taxi providers. Transp. Res. Part A Policy Pract. 2016, 85, 233–246. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Dong, J.; Hu, L. A data-driven optimization-based approach for siting and sizing of electric taxi charging stations. Transp. Res. Part C Emerg. Technol. 2017, 77, 462–477. [Google Scholar] [CrossRef] [Green Version]
- Bradley, L.; Golestani, N.; Kazutaka, K.; Tanaka, I.; Yamakawa, T. Charging Infrastructure Strategies: Maximizing the Deployment of Electric Drayage Trucks in Southern California; Technical Report; Capstone Projects; UCLA Institute of Transportation: Los Angeles, CA, USA, 2019. [Google Scholar] [CrossRef]
- Roni, M.S.; Yi, Z.; Smart, J.G. Optimal charging management and infrastructure planning for free-floating shared electric vehicles. Transp. Res. Part D Transp. Environ. 2019, 76, 155–175. [Google Scholar] [CrossRef]
- Hua, Y.; Zhao, D.; Wang, X.; Li, X. Joint infrastructure planning and fleet management for one-way electric car sharing under time-varying uncertain demand. Transp. Res. Part B Methodol. 2019, 128, 185–206. [Google Scholar] [CrossRef]
- Luo, C.; Huang, Y.F.; Gupta, V. Placement of EV Charging Stations-Balancing Benefits among Multiple Entities. IEEE Trans. Smart Grid 2017, 8, 759–768. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Bie, Z. Optimal Allocation Planning for Public EV Charging Station Considering AC and DC Integrated Chargers. Energy Procedia 2019, 159, 382–387. [Google Scholar] [CrossRef]
- Bai, X.; Chin, K.S.; Zhou, Z. A bi-objective model for location planning of electric vehicle charging stations with GPS trajectory data. Comput. Ind. Eng. 2019, 128, 591–604. [Google Scholar] [CrossRef]
- Xiang, Y.; Liu, J.; Li, R.; Li, F.; Gu, C.; Tang, S. Economic planning of electric vehicle charging stations considering traffic constraints and load profile templates. Appl. Energy 2016, 178, 647–659. [Google Scholar] [CrossRef] [Green Version]
- Gong, L.; Fu, Y.; Li, Z. Integrated planning of BEV public fast-charging stations. Electr. J. 2016, 29, 62–77. [Google Scholar] [CrossRef]
- Yi, Z.; Bauer, P.H. Optimization models for placement of an energy-aware electric vehicle charging infrastructure. Transp. Res. Part E Logist. Transp. Rev. 2016, 91, 227–244. [Google Scholar] [CrossRef] [Green Version]
- Davidov, S.; Pantoš, M. Optimization model for charging infrastructure planning with electric power system reliability check. Energy 2019, 166, 886–894. [Google Scholar] [CrossRef]
- Sebastiani, M.T.; Luders, R.; Fonseca, K.V.O. Evaluating Electric Bus Operation for a Real-World BRT Public Transportation Using Simulation Optimization. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2777–2786. [Google Scholar] [CrossRef]
- Hayajneh, H.S.; Bani Salim, M.N.; Bashetty, S.; Zhang, X. Optimal Planning of Battery-Powered Electric Vehicle Charging Station Networks. In Proceedings of the IEEE Green Technologies Conference, Lafayette, LA, USA, 3–6 April 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Mainul Islam, M.; Shareef, H.; Mohamed, A. Optimal location and sizing of fast charging stations for electric vehicles by incorporating traffic and power networks. IET Intell. Transp. Syst. 2018, 12, 947–957. [Google Scholar] [CrossRef]
- Rajabi-Ghahnavieh, A.; Sadeghi-Barzani, P. Optimal Zonal Fast-Charging Station Placement Considering Urban Traffic Circulation. IEEE Trans. Veh. Technol. 2017, 66, 45–56. [Google Scholar] [CrossRef]
- Luo, L.; Wu, Z.; Gu, W.; Huang, H.; Gao, S.; Han, J. Coordinated allocation of distributed generation resources and electric vehicle charging stations in distribution systems with vehicle-to-grid interaction. Energy 2020, 192, 116631. [Google Scholar] [CrossRef]
- Sachan, S.; Kishor, N. Optimal location for centralized charging of electric vehicle in distribution network. In Proceedings of the 2016 18th Mediterranean Electrotechnical Conference (MELECON), Lemesos, Cyprus, 18–20 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Phonrattanasak, P.; Leeprechanon, N. Optimal placement of EV fast charging stations considering the impact on electrical distribution and traffic condition. In Proceedings of the 2014 International Conference and Utility Exhibition on Green Energy for Sustainable Development (ICUE), Pattaya, Thailand, 19–21 March 2014; pp. 1–6. [Google Scholar]
- Andrenacci, N.; Ragona, R.; Valenti, G. A demand-side approach to the optimal deployment of electric vehicle charging stations in metropolitan areas. Appl. Energy 2016, 182, 39–46. [Google Scholar] [CrossRef]
- Awasthi, A.; Venkitusamy, K.; Padmanaban, S.; Selvamuthukumaran, R.; Blaabjerg, F.; Singh, A.K. Optimal planning of electric vehicle charging station at the distribution system using hybrid optimization algorithm. Energy 2017, 133, 70–78. [Google Scholar] [CrossRef]
- Erbaş, M.; Kabak, M.; Özceylan, E.; Çetinkaya, C. Optimal siting of electric vehicle charging stations: A GIS-based fuzzy Multi-Criteria Decision Analysis. Energy 2018, 163, 1017–1031. [Google Scholar] [CrossRef]
- Kandil, S.M.; Farag, H.E.; Shaaban, M.F.; El-Sharafy, M.Z. A combined resource allocation framework for PEVs charging stations, renewable energy resources and distributed energy storage systems. Energy 2018, 143, 961–972. [Google Scholar] [CrossRef]
- Zuo, A. Prediction and distribution of Ev charging stations. AIP Conf. Proc. 2019, 2066, 20040. [Google Scholar] [CrossRef]
- Olsen, N. A Literature Overview on Scheduling Electric Vehicles in Public Transport and Location Planning of the Charging Infrastructure. Discussion Paper/School of Business & Economics; Information Systems A Literature Overview on Scheduling Electric Vehicles in Pub. Available online: https://ideas.repec.org/p/zbw/fubsbe/202016.html (accessed on 1 December 2021).
- Wang, X.; Yuen, C.; Hassan, N.U.; An, N.; Wu, W. Electric Vehicle Charging Station Placement for Urban Public Bus Systems. IEEE Trans. Intell. Transp. Syst. 2017, 18, 128–139. [Google Scholar] [CrossRef]
- Glotz-Richter, M.; Koch, H. Electrification of Public Transport in Cities (Horizon 2020 ELIPTIC Project). In Proceedings of the Transportation Research Procedia; Elsevier B.V.: Amsterdam, The Netherlands, 2016; Volume 14, pp. 2614–2619. [Google Scholar] [CrossRef] [Green Version]
- Arif, S.M.; Lie, T.T.; Seet, B.C.; Ayyadi, S.; Jensen, K. Review of Electric Vehicle Technologies, Charging Methods, Standards and Optimization Techniques. Electronics 2021, 10, 1910. [Google Scholar] [CrossRef]
- Rossi, F.; Iglesias, R.; Alizadeh, M.; Pavone, M. On the Interaction between Autonomous Mobility-on-Demand Systems and the Power Network: Models and Coordination Algorithms. IEEE Trans. Control Netw. Syst. 2020, 7, 384–397. [Google Scholar] [CrossRef] [Green Version]
- Jafarzadeh, S.; Schjølberg, I. Operational profiles of ships in Norwegian waters: An activity-based approach to assess the benefits of hybrid and electric propulsion. Transp. Res. Part D Transp. Environ. 2018, 65, 500–523. [Google Scholar] [CrossRef] [Green Version]
- Prousalidis, J.; Lyridis, D.; Dallas, S.; Georgiou, V.; Spathis, D.; Soghomonian, Z.; Kourmpelis, T.; Mitrou, P. Ship to shore electric interconnection: From adolescence to maturity. In Proceedings of the 2017 IEEE Electric Ship Technologies Symposium, ESTS 2017, Arlington, VA, USA, 14–17 August 2017; pp. 200–206. [Google Scholar] [CrossRef]
- Bunsen, T.; Cazzola, P.; D’Amore, L.; Gorner, M.; Scheffer, S.; Schuitmaker, R.; Signollet, H.; Tattini, J.; Paoli, J.T.L. Global EV Outlook 2019 to Electric Mobility; OECD: Paris, France, 2019; p. 232. [Google Scholar]
- Saldaña, G.; Martin, J.I.S.; Zamora, I.; Asensio, F.J.; Oñederra, O. Electric vehicle into the grid: Charging methodologies aimed at providing ancillary services considering battery degradation. Energies 2019, 12, 2443. [Google Scholar] [CrossRef] [Green Version]
- Deb, S.; Kalita, K.; Mahanta, P. Review of impact of electric vehicle charging station on the power grid. In Proceedings of the 2017 IEEE International Conference on Technological Advancements in Power and Energy, Kollam, India, 21–23 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Savio Abraham, D.; Verma, R.; Kanagaraj, L.; Giri Thulasi Raman, S.R.; Rajamanickam, N.; Chokkalingam, B.; Marimuthu Sekar, K.; Mihet-Popa, L. Electric Vehicles Charging Stations’ Architectures, Criteria, Power Converters, and Control Strategies in Microgrids. Electronics 2021, 10, 1895. [Google Scholar] [CrossRef]
- Das, H.S.; Rahman, M.M.; Li, S.; Tan, C.W. Electric Vehicles Standards, Charging Infrastructure, and Impact on Grid Integration: A Technological Review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Davidov, S. Optimal charging infrastructure planning based on a charging convenience buffer. Energy 2020, 192, 116655. [Google Scholar] [CrossRef]
- Zeb, M.Z.; Imran, K.; Khattak, A.; Janjua, A.K.; Pal, A.; Nadeem, M.; Zhang, J.; Khan, S. Optimal Placement of Electric Vehicle Charging Stations in the Active Distribution Network. IEEE Access 2020, 8, 68124–68134. [Google Scholar] [CrossRef]
- Mulenga, E.; Bollen, M.H.J.; Etherden, N. Adapted Stochastic PV Hosting Capacity Approach for Electric Vehicle Charging Considering Undervoltage. Electricity 2021, 2, 23. [Google Scholar] [CrossRef]
- Abdalrahman, A.; Zhuang, W. QoS-Aware Capacity Planning of Networked PEV Charging Infrastructure. IEEE Open J. Veh. Technol. 2020, 1, 116–129. [Google Scholar] [CrossRef]
- Clairand, J.M.; Guerra-Terán, P.; Serrano-Guerrero, X.; González-Rodríguez, M.; Escrivá-Escrivá, G. Electric vehicles for public transportation in power systems: A review of methodologies. Energies 2019, 12, 3114. [Google Scholar] [CrossRef] [Green Version]
- Adegbohun, F.; von Jouanne, A.; Lee, K.Y. Autonomous battery swapping system and methodologies of electric vehicles. Energies 2019, 12, 667. [Google Scholar] [CrossRef] [Green Version]
- Baster, H. Danish Experiences in Setting up Charging Infrastructure for Electric Vehicles with a Special Focus on Battery Swap Stations Table of Contents. Technical Report. Available online: http://e-mobility-nsr.eu/fileadmin/user_upload/downloads/info-pool/Acitivty_5.2_report_FDT.pdf (accessed on 1 December 2021).
- Du, R.; Liao, G.; Zhang, E.; Wang, J. Battery charge or change, which is better? A case from Beijing, China. J. Clean. Prod. 2018, 192, 698–711. [Google Scholar] [CrossRef]
- Liao, B.; Li, L.; Li, B.; Mao, J.; Yang, J.; Wen, F.; Salam, M.A. Load modeling for electric taxi battery charging and swapping stations: Comparison studies. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016. [Google Scholar] [CrossRef]
- Bak, D.B.; Bak, J.S.; Kim, S.Y. Strategies for Implementing Public Service Electric Bus Lines by Charging Type in Daegu Metropolitan City, South Korea. Sustainability 2018, 10, 3386. [Google Scholar] [CrossRef] [Green Version]
- Suul, J.A.; Guidi, G. Technology for Dynamic on-Road Power Transfer to Electric Vehicles -OVERVIEW and Electro-Technical Evaluation of the State-of-the-Art for Conductive and Inductive Power Transfer Technologies; ELinGo: Freiburg, Germany, 2018. [Google Scholar]
- Viktoria Swedish ICT. Slide-in Electric Road System, Conductive Project Report; Viktoria Swedish ICT: Vastra Gotaland, Sweden, 2013; pp. 1–65. [Google Scholar]
- Zhang, W.; White, J.C.; Abraham, A.M.; Mi, C.C. Loosely Coupled Transformer Structure and Interoperability Study for EV Wireless Charging Systems. IEEE Trans. Power Electron. 2015, 30, 6356–6367. [Google Scholar] [CrossRef]
- Ibrahim, M.; Bernard, L.; Pichon, L.; Laboure, E.; Razek, A.; Cayol, O.; Ladas, D.; Irving, J. Inductive Charger for Electric Vehicle: Advanced Modeling and Interoperability Analysis. IEEE Trans. Power Electron. 2016, 31, 8096–8114. [Google Scholar] [CrossRef]
- Danese, A.; Garau, M.; Sumper, A.; Torsæter, B.N. Electrical Infrastructure Design Methodology of Dynamic and Static Charging for Heavy and Light Duty Electric Vehicles. Energies 2021, 14, 3362. [Google Scholar] [CrossRef]
- Bakker, S.; Trip, J.J. An Analysis of the Standardization Process of Electric Vehicle Recharging Systems. In E-Mobility in Europe: Trends and Good Practice; Leal Filho, W., Kotter, R., Eds.; Green Energy and Technology; Springer: Cham, Switzerland, 2015; pp. 55–71. [Google Scholar] [CrossRef]
- Martinenas, S. Enabling Technologies for Smart Grid Integration and Interoperability of Electric Vehicles. Ph.D. Thesis, Technical University of Denmark, Department of Electrical Engineering, Kongens Lyngby, Denmark, 2017. [Google Scholar]
- Shaukat, N.; Khan, B.; Ali, S.; Mehmood, C.; Khan, J.; Farid, U.; Majid, M.; Anwar, S.; Jawad, M.; Ullah, Z. A survey on electric vehicle transportation within smart grid system. Renew. Sustain. Energy Rev. 2018, 81, 1329–1349. [Google Scholar] [CrossRef]
- Brenna, M.; Foiadelli, F.; Leone, C.; Longo, M. Electric Vehicles Charging Technology Review and Optimal Size Estimation. J. Electr. Eng. Technol. 2020, 15, 2539–2552. [Google Scholar] [CrossRef]
- Tahir, Y.; Khan, I.; Rahman, S.; Nadeem, M.F.; Iqbal, A.; Xu, Y.; Rafi, M. A State-of-the-Art Review on Topologies and Control Techniques of Solid-State Transformers for Electric Vehicle Extreme Fast Charging. IET Power Electron. 2021, 14, 1560–1576. [Google Scholar] [CrossRef]
- Afonso, J.L.; Cardoso, L.A.L.; Pedrosa, D.; Sousa, T.J.C.; Machado, L.; Tanta, M.; Monteiro, V. A Review on Power Electronics Technologies for Electric Mobility. Energies 2020, 13, 6343. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Ronanki, D.; Kelkar, A.; Williamson, S.S. Extreme Fast Charging Technology—Prospects to Enhance Sustainable Electric Transportation. Energies 2019, 12, 3721. [Google Scholar] [CrossRef] [Green Version]
- Deb, N.; Singh, R.; Brooks, R.R.; Bai, K. A Review of Extremely Fast Charging Stations for Electric Vehicles. Energies 2021, 14, 7566. [Google Scholar] [CrossRef]
- Hafez, O.; Bhattacharya, K. Optimal Design of Electric Vehicle Charging Stations Considering Various Energy Resources. Renew. Energy 2017, 107, 576–589. [Google Scholar] [CrossRef]
- Brenna, M.; Lazaroiu, G.C.; Roscia, M.; Saadatmandi, S. Dynamic Model for the EV’s Charging Infrastructure Planning through Finite Element Method. IEEE Access 2020, 8, 102399–102408. [Google Scholar] [CrossRef]
- Zhang, A.; Kang, J.E.; Kwon, C. Multi-day scenario analysis for battery electric vehicle feasibility assessment and charging infrastructure planning. Transp. Res. Part C Emerg. Technol. 2020, 111, 439–457. [Google Scholar] [CrossRef]
- Soares, F.J.; Almeida, P.M.; Lopes, J.A. Quasi-real-time management of Electric Vehicles charging. Electr. Power Syst. Res. 2014, 108, 293–303. [Google Scholar] [CrossRef] [Green Version]
- Alharbi, W.; Bhattacharya, K. Impact of mixed charging requests of PEVs on a charging facility load and a distribution grid. In Proceedings of the 2017 IEEE Green Energy and Smart Systems Conference (IGESSC), Long Beach, CA, USA, 6–7 November 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Masood, A.; Hu, J.; Xin, A.; Sayed, A.R.; Yang, G. Transactive Energy for Aggregated Electric Vehicles to Reduce System Peak Load Considering Network Constraints. IEEE Access 2020, 8, 31519–31529. [Google Scholar] [CrossRef]
- Pea-Da, B.; Dechanupaprittha, S. Impact of fast charging station to voltage profile in distribution system. In Proceedings of the 2014 International Electrical Engineering Congress (iEECON), Chonburi, Thailand, 19–21 March 2014. [Google Scholar] [CrossRef]
- Dong, J.; Liu, C.; Lin, Z. Charging infrastructure planning for promoting battery electric vehicles: An activity-based approach using multiday travel data. Transp. Res. Part C Emerg. Technol. 2014, 38, 44–55. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; Kockelman, K.; Khan, M. Locating electric vehicle charging stations. Transp. Res. Rec. 2013, 2385, 28–36. [Google Scholar] [CrossRef]
- Calearo, L.; Marinelli, M.; Ziras, C. A review of data sources for electric vehicle integration studies. Renew. Sustain. Rev. 2021, 151, 111518. [Google Scholar] [CrossRef]
- Kavianipour, M.; Fakhrmoosavi, F.; Singh, H.; Ghamami, M.; Zockaie, A.; Ouyang, Y.; Jackson, R. Electric vehicle fast charging infrastructure planning in urban networks considering daily travel and charging behavior. Transp. Res. Part D Transp. Environ. 2021, 93, 102769. [Google Scholar] [CrossRef]
- Pagany, R.; Ramirez Camargo, L.; Dorner, W. A review of spatial localization methodologies for the electric vehicle charging infrastructure. Int. J. Sustain. Transp. 2019, 13, 433–449. [Google Scholar] [CrossRef] [Green Version]
- Dang, Q.; Wu, D.; Boulet, B. An Advanced Framework for Electric Vehicles Interaction with Distribution Grids Based on Q-Learning. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 3491–3495. [Google Scholar] [CrossRef]
- Wang, S.; Sun, D.; Du, L.; Ye, J. Noncooperative distributed social welfare optimization with EV charging response. In Proceedings of the IECON 2018–44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2097–2102. [Google Scholar] [CrossRef]
- Domínguez-Navarro, J.A.; Dufo-López, R.; Yusta-Loyo, J.M.; Artal-Sevil, J.S.; Bernal-Agustín, J.L. Design of an electric vehicle fast-charging station with integration of renewable energy and storage systems. Int. J. Electr. Power Energy Syst. 2019, 105, 46–58. [Google Scholar] [CrossRef]
- Rauma, K.; Funke, A.; Simolin, T.; Järventausta, P.; Rehtanz, C. Electric Vehicles as a Flexibility Provider: Optimal Charging Schedules to Improve the Quality of Charging Service. Electricity 2021, 2, 14. [Google Scholar] [CrossRef]
- Lane, B.W. Revisiting ‘An unpopular essay on transportation:’ The outcomes of old myths and the implications of new technologies for the sustainability of transport. J. Transp. Geogr. 2019, 81, 102535. [Google Scholar] [CrossRef]
- Sperling, D. Electric Vehicles: Approaching the Tipping Point; Island Press: Washington, DC, USA, 2018; pp. 21–54. [Google Scholar] [CrossRef]
- Yang, X.; Liu, L. A Multi-Objective Bus Rapid Transit Energy Saving Dispatching Optimization Considering Multiple Types of Vehicles. IEEE Access 2020, 8, 79459–79471. [Google Scholar] [CrossRef]
- Yao, E.; Liu, T.; Lu, T.; Yang, Y. Optimization of electric vehicle scheduling with multiple vehicle types in public transport. Sustain. Cities Soc. 2020, 52, 101862. [Google Scholar] [CrossRef]
- Houbbadi, A.; Trigui, R.; Pelissier, S.; Redondo-Iglesias, E.; Bouton, T. Optimal Scheduling to Manage an Electric Bus Fleet Overnight Charging. Energies 2019, 12, 2727. [Google Scholar] [CrossRef] [Green Version]
- Einaddin, A.H.; Yazdankhah, A.S. A novel approach for multi-objective optimal scheduling of large-scale EV fleets in a smart distribution grid considering realistic and stochastic modeling framework. Int. J. Electr. Power Energy Syst. 2020, 117, 105617. [Google Scholar] [CrossRef]
- Braam, F.; Groß, A.; Mierau, M.; Kohrs, R.; Wittwer, C. Coordinated charge management for battery electric vehicles: Operation management of charging infrastructures for battery electric vehicles considering vehicle, infrastructure, and grid constraints. Comput. Sci. Res. Dev. 2017, 32, 183–193. [Google Scholar] [CrossRef]
- Mao, T.; Zhang, X.; Zhou, B. Intelligent Energy Management Algorithms for EV-charging Scheduling with Consideration of Multiple EV Charging Modes. Energies 2019, 12, 265. [Google Scholar] [CrossRef] [Green Version]
- Zarbouti, D.; Koutsi, E.; Athanasiadou, G.; Tsoulos, G. Minimizing the Cost of PHEV Usage with Price Sensitive Charging Strategies. Electricity 2021, 2, 27. [Google Scholar] [CrossRef]
- Verbeek, F.; Murray, J.; Glover, L. Sector Report EV Charging at the Crossroads: The Fast, The Curious & The Race for Scale. Technical Report. Available online: https://mena.nl/whitepaper/sector-report-electric-vehicles-charging-at-the-crossroads-the-fast-the-curious–the-race-for-scale (accessed on 1 December 2021).
- Tang, Z.; Guo, C.; Hou, P.; Fan, Y. Optimal Siting of Electric Vehicle Charging Stations Based on Voronoi Diagram and FAHP Method. Energy Power Eng. 2013, 05, 1404–1409. [Google Scholar] [CrossRef]
- Xiao, D.; An, S.; Cai, H.; Wang, J.; Cai, H. An optimization model for electric vehicle charging infrastructure planning considering queuing behavior with finite queue length. J. Energy Storage 2020, 29, 101317. [Google Scholar] [CrossRef]
- Wang, G.; Xu, Z.; Wen, F.; Wong, K.P. Traffic-constrained multiobjective planning of electric-vehicle charging stations. IEEE Trans. Power Deliv. 2013, 28, 2363–2372. [Google Scholar] [CrossRef]
- Yao, W.; Zhao, J.; Wen, F.; Dong, Z.; Xue, Y.; Xu, Y.; Meng, K. A multi-objective collaborative planning strategy for integrated power distribution and electric vehicle charging systems. IEEE Trans. Power Syst. 2014, 29, 1811–1821. [Google Scholar] [CrossRef]
- Ahmadi, M.; Mithulananthan, N. Dynamic voltage stability of distribution grids with fast charging stations for EV units. In Proceedings of the 2018 International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Kajang, Malaysia, 29 May–1 June 2018; pp. 130–136. [Google Scholar] [CrossRef]
- Brombach, J.; Mayer, F.; Strafiel, C.; Winkler, J.; Beekmann, A. Grid-Integration of High Power Charging Infrastructure. In Proceedings of the 1st E-Mobility Power System Integration Symposium, Berlin, Germany, 23 October 2017. [Google Scholar]
- Grenier, A.; Page, S. The impact of electrified transport on local grid infrastructure: A comparison between electric cars and light rail. Energy Policy 2012, 49, 355–364. [Google Scholar] [CrossRef] [Green Version]
- Clairand, J.M.; Rodríguez-García, J.; Álvarez-Bel, C. Electric vehicle charging strategy for isolated systems with high penetration of renewable generation. Energies 2018, 11, 3188. [Google Scholar] [CrossRef] [Green Version]
- Saber, A.Y.; Venayagamoorthy, G.K. Plug-in vehicles and renewable energy sources for cost and emission reductions. IEEE Trans. Ind. Electron. 2011, 58, 1229–1238. [Google Scholar] [CrossRef]
- Khalkhali, H.; Hosseinian, S.H. Multi-stage stochastic framework for simultaneous energy management of slow and fast charge electric vehicles in a restructured smart parking lot. Int. J. Electr. Power Energy Syst. 2020, 116. [Google Scholar] [CrossRef]
- Gao, S.; Jia, H. Integrated Configuration and Optimization of Electric Vehicle Aggregators for Charging Facilities in Power Networks with Renewables. IEEE Access 2019, 7, 84690–84700. [Google Scholar] [CrossRef]
- Hu, B.; Wang, S.; Zhang, X.; Wang, T.; Qu, F.; Zheng, W.; Zhou, B. Power grid peak shaving strategies based on electric vehicles and thermal storage electric boilers. In Proceedings of the IOP Conference Series: Earth and Environmental Science; Institute of Physics Publishing: Bristol, UK, 2019; Volume 227, p. 032026. [Google Scholar] [CrossRef]
- Transport & Environment. How Clean Are Electric Cars? Transport & Environment: Brussels, Belgium, 2020; pp. 1–33. [Google Scholar]
- Zheng, H.; He, X.; Li, Y.; Peeta, S. Traffic Equilibrium and Charging Facility Locations for Electric Vehicles. Netw. Spat. Econ. 2017, 17, 435–457. [Google Scholar] [CrossRef]
- Milam, R.T.; Birnbaum, M.; Ganson, C.; Handy, S.; Walters, J. Closing the induced vehicle travel gap between research and practice. Transp. Res. Rec. 2017, 2653, 10–16. [Google Scholar] [CrossRef] [Green Version]
- Bouton, S.; Hannon, E.; Knupfer, S.; Ramkumar, S. The Future(s) of Mobility: How Cities can Benefit; McKinsey Company: Minato, Tokyo, 2017. [Google Scholar]
- Chavez-Baeza, C.; Sheinbaum-Pardo, C. Sustainable passenger road transport scenarios to reduce fuel consumption, air pollutants and GHG (greenhouse gas) emissions in the Mexico City Metropolitan Area. Energy 2014, 66, 624–634. [Google Scholar] [CrossRef]
- Kleeman, M.J.; Zapata, C.; Stilley, J.; Hixson, M. PM2.5 co-benefits of climate change legislation part 2: California governor’s executive order S-3-05 applied to the transportation sector. Clim. Change 2013, 117, 399–414. [Google Scholar] [CrossRef]
- Creutzig, F.; Mühlhoff, R.; Römer, J. Decarbonizing urban transport in European cities: Four cases show possibly high co-benefits. Environ. Res. Lett. 2012, 7, 044042. [Google Scholar] [CrossRef]
- Ma, Y.; Ke, R.Y.; Han, R.; Tang, B.J. The analysis of the battery electric vehicle’s potentiality of environmental effect: A case study of Beijing from 2016 to 2020. J. Clean. Prod. 2017, 145, 395–406. [Google Scholar] [CrossRef]
- European Parliament. Regulation of the European Parliament and of the Council Setting CO2 Emission Performance Standards for New Heavy-Duty Vehicles; Technical Report; European Parliament: Strasbourg, France, 2018. [Google Scholar]
- Hannon, E.; Knupfer, S.; Stern, S.; Sumers, B.; Nijssen, J.T. An Integrated Perspective on the Future of Mobility, Part 3: Setting the Direction toward Seamless Mobility; Technical Report 1; McKinsey Company: Minato, Tokyo, 2016. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Horizon [yrs] | Private | Public |
|---|---|---|
| ≥5 | [20,21] | |
| ≥10 | [22,23,24] | [25] |
| ≥10 ∧ ≤15 | [23,24,25,26,27,28] | |
| ≥15 | [29,30,31] | [32] |
| Approach | Allocation and Sizing | Transport Network | Mode of Transport | HPCS | Candidate Site | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ref | D | M | U | R | I | H | P | B | T | S | HDV | |||
| [20] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [21] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [22] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [23] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [24] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [25] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| [27] | ✓ | ✓ | ✓ | ✓ | ||||||||||
| [28] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [29] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [30] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [32] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [34] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| [37] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [38] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [39] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [40] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [41] | ✓ | ✓ | ✓ | ✓ | ||||||||||
| [42] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [43] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [44] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [45] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [46] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [47] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [48] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [49] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [50] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [51] | ✓ | ✓ | ✓ | ✓ | ||||||||||
| [52] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [53] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [54] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [55] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [56] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [57] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [58] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [59] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [60] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [61] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [62] | ✓ | ✓ | ✓ | |||||||||||
| [63] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| [64] | ✓ | ✓ | ✓ | |||||||||||
| [65] | ✓ | ✓ | ✓ | ✓ | ||||||||||
| [66] | ✓ | ✓ | ✓ | |||||||||||
| [67] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||||
| Standard | Scope |
|---|---|
| SAE J1772 | Discusses all the equipment ratings for EV charging including circuit breaker current rating, charging voltage rating. |
| SAE J2293 | Establishes the requirement of on and offboard charging equipment. |
| SAE J2847 | Provides standard communication requirements between the utility grid and plug-in electric vehicles. |
| SAE J2954 | Defines a wireless power transfer of all types of plug-in electric vehicles and coil alignment methodology. |
| IEEE 1547 | Defines standards for interconnecting distributed resources with electric power systems. |
| IEC 61980-3 | Defines the magnetic field-based wireless power system and its specific requirements. |
| IEC TS 62840-1 | Gives a general overview for battery swap systems. |
| IEC 61851-21-1 | Defines requirements for conductive connection of an electric vehicle (EV) to an AC or DC supply. |
| IEC 61851-24 | Defines a digital communication between a DC charging station and an EV. |
| IEC 62196-1 | Gives a general overview of the interface between the EV and the charging station. |
| IEC 62196-2 | Extends the previous designs with detailed description of plugs and socket outlets. |
| IEC 62196-3 | Describes the DC vehicle coupler and defines the characteristics of the DC vehicle coupler. |
| Ref | Year | Charging Station | Installation | O&M | Land | Penalty |
|---|---|---|---|---|---|---|
| [23] | 2019 | ✓ | ✓ | |||
| [24] | 2018 | ✓ | ✓ | ✓ | ||
| [25] | 2016 | ✓ | ✓ | ✓ | ||
| [28] | 2016 | ✓ | ✓ | ✓ | ✓ | |
| [29] | 2016 | ✓ | ✓ | |||
| [30] | 2018 | ✓ | ✓ | ✓ | ||
| [32] | 2019 | ✓ | ✓ | |||
| [34] | 2019 | ✓ | ✓ | |||
| [39] | 2018 | ✓ | ✓ | |||
| [41] | 2016 | ✓ | ✓ | |||
| [42] | 2017 | ✓ | ✓ | |||
| [43] | 2017 | ✓ | ✓ | ✓ | ✓ | |
| [44] | 2018 | ✓ | ✓ | ✓ | ||
| [46] | 2017 | ✓ | ✓ | |||
| [82] | 2020 | ✓ | ✓ | ✓ | ✓ | |
| [50] | 2017 | ✓ | ✓ | ✓ | ||
| [51] | 2019 | ✓ | ✓ | |||
| [52] | 2019 | ✓ | ✓ | |||
| [53] | 2016 | ✓ | ✓ | |||
| [54] | 2016 | ✓ | ✓ | ✓ | ||
| [56] | 2019 | ✓ | ✓ | ✓ | ||
| [58] | 2019 | ✓ | ✓ | |||
| [59] | 2018 | ✓ | ✓ | ✓ | ||
| [60] | 2017 | ✓ | ✓ | |||
| [61] | 2019 | ✓ | ✓ | |||
| [63] | 2014 | ✓ | ✓ | |||
| [65] | 2017 | ✓ | ✓ | ✓ | ||
| [67] | 2018 | ✓ | ✓ | |||
| [119] | 2019 | ✓ | ✓ | ✓ | ||
| [132] | 2020 | ✓ | ✓ | ✓ |
| U | P | CT WC | CC | ||
|---|---|---|---|---|---|
| Ref | Year | ||||
| [20] | 2016 | ✓ | |||
| [21] | 2016 | ✓ | |||
| [22] | 2019 | ✓ | ✓ | ||
| [23] | 2019 | ✓ | ✓ | ||
| [24] | 2018 | ✓ | ✓ | ||
| [28] | 2016 | ✓ | |||
| [30] | 2018 | ✓ | |||
| [38] | 2017 | ✓ | |||
| [41] | 2016 | ✓ | |||
| [43] | 2017 | ✓ | ✓ | ||
| [48] | 2019 | ✓ | |||
| [81] | 2020 | ✓ | |||
| [82] | 2020 | ✓ | |||
| [50] | 2017 | ✓ | |||
| [51] | 2019 | ✓ | |||
| [52] | 2019 | ✓ | |||
| [54] | 2016 | ✓ | |||
| [55] | 2016 | ✓ | |||
| [57] | 2016 | ✓ | |||
| [58] | 2019 | ✓ | |||
| [59] | 2018 | ✓ | |||
| [60] | 2017 | ✓ | |||
| [62] | 2016 | ✓ | ✓ | ||
| [63] | 2014 | ✓ | |||
| [67] | 2018 | ✓ | |||
| [119] | 2019 | ✓ | ✓ | ||
| [132] | 2020 | ✓ | ✓ | ✓ |
| Grid Expansion | Energy Loss | Electrical Network | ||
|---|---|---|---|---|
| Ref | Year | |||
| [22] | 2019 | ✓ | ✓ | |
| [23] | 2019 | ✓ | ✓ | |
| [24] | 2018 | ✓ | ✓ | |
| [25] | 2016 | ✓ | ✓ | |
| [28] | 2016 | ✓ | ✓ | |
| [32] | 2019 | ✓ | ✓ | |
| [82] | 2020 | ✓ | ✓ | |
| [50] | 2017 | ✓ | ✓ | |
| [51] | 2019 | ✓ | ||
| [84] | 2020 | ✓ | ✓ | |
| [53] | 2016 | ✓ | ✓ | |
| [55] | 2016 | ✓ | ||
| [58] | 2019 | ✓ | ||
| [60] | 2017 | ✓ | ✓ | |
| [61] | 2019 | ✓ | ✓ | |
| [62] | 2016 | ✓ | ✓ | |
| [63] | 2014 | ✓ | ||
| [65] | 2017 | ✓ | ✓ |
| Procedure | Methods/Formulation | Refs |
|---|---|---|
| Metaheuristic | PSO GA Binary Lightning Ant colony | [22,24,65] [23,25,27,28,29,30,52,57,58,60,65,67] [59] [20,63] |
| Deterministic | MISOCP NLP MILP ILP | [32,61] [67] [27,39,41,42,43,44,45,58] [46] |
| Accurate simulation | [38,51,57] | |
| Discrete choice | Nested logit (Bayesian game) | [50] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danese, A.; Torsæter, B.N.; Sumper, A.; Garau, M. Planning of High-Power Charging Stations for Electric Vehicles: A Review. Appl. Sci. 2022, 12, 3214. https://doi.org/10.3390/app12073214
Danese A, Torsæter BN, Sumper A, Garau M. Planning of High-Power Charging Stations for Electric Vehicles: A Review. Applied Sciences. 2022; 12(7):3214. https://doi.org/10.3390/app12073214
Chicago/Turabian StyleDanese, Alberto, Bendik Nybakk Torsæter, Andreas Sumper, and Michele Garau. 2022. "Planning of High-Power Charging Stations for Electric Vehicles: A Review" Applied Sciences 12, no. 7: 3214. https://doi.org/10.3390/app12073214
APA StyleDanese, A., Torsæter, B. N., Sumper, A., & Garau, M. (2022). Planning of High-Power Charging Stations for Electric Vehicles: A Review. Applied Sciences, 12(7), 3214. https://doi.org/10.3390/app12073214