
Some Practical Acoustic Design and Typical Control Strategies for Multichannel Active Noise Control


Abstract
:1. Introduction
2. Practical Acoustic Design
2.1. Effect of Reflecting Surface on ANC
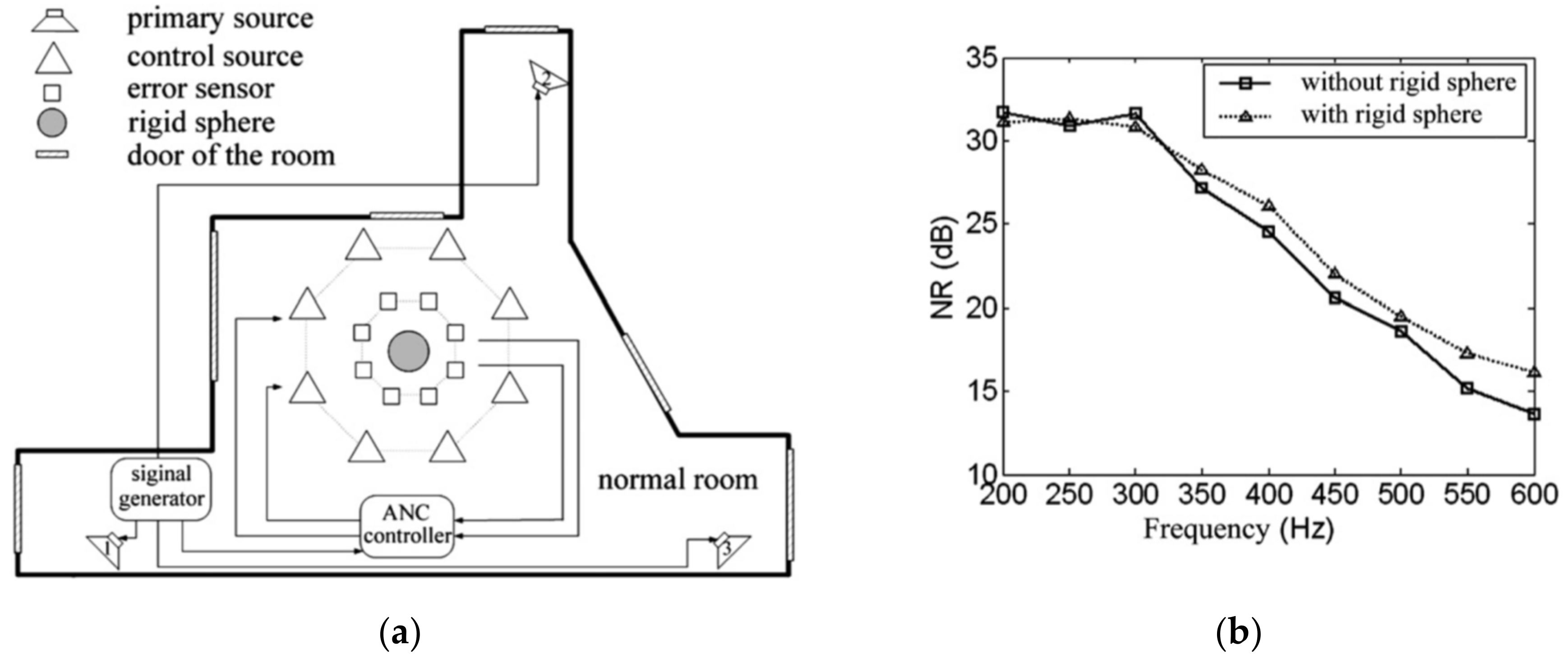
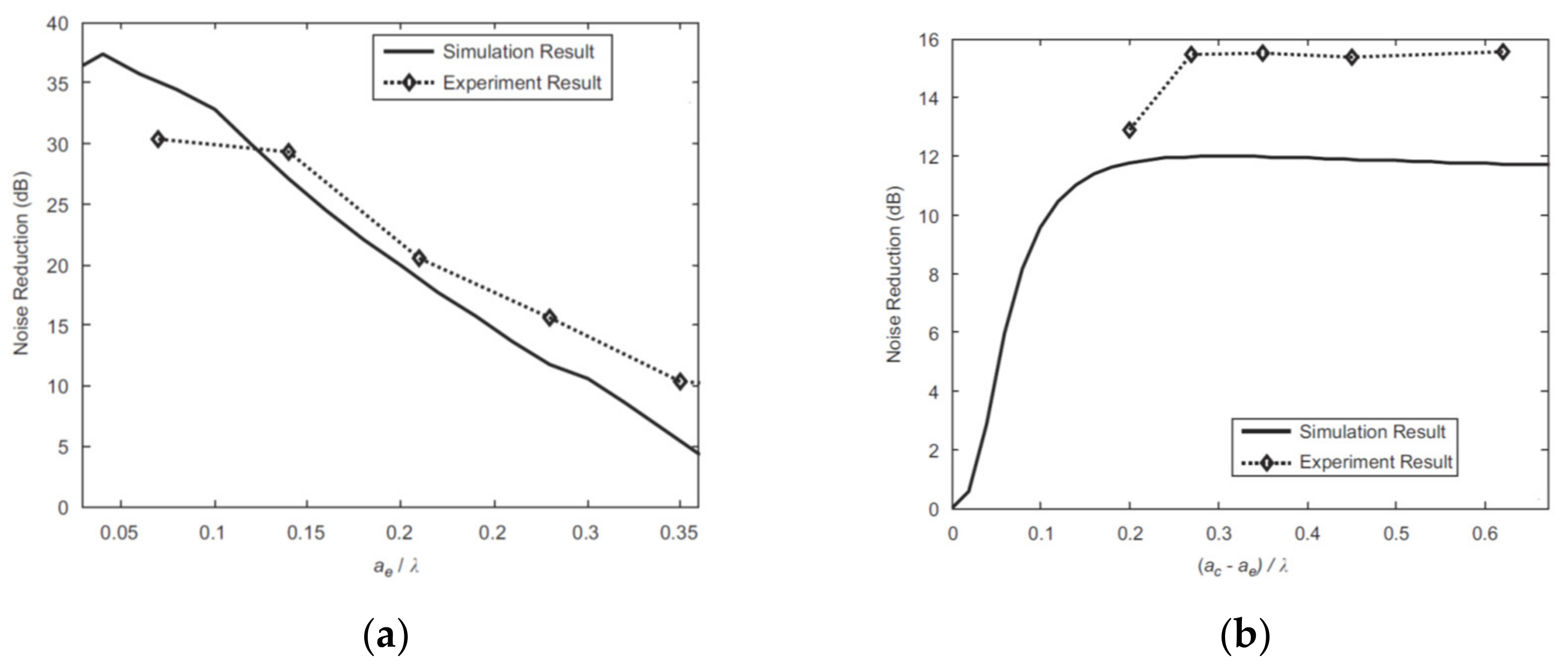
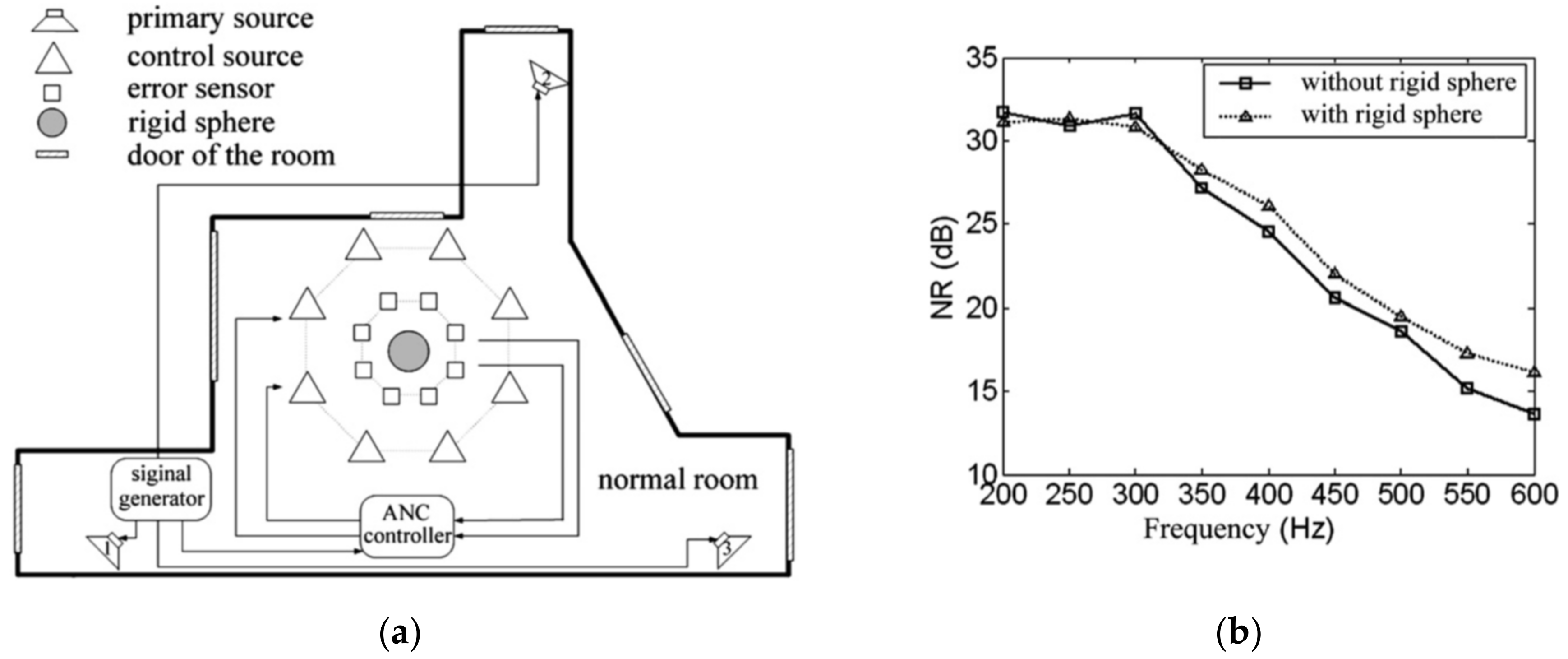
2.2. ANC in Open Areas around Head
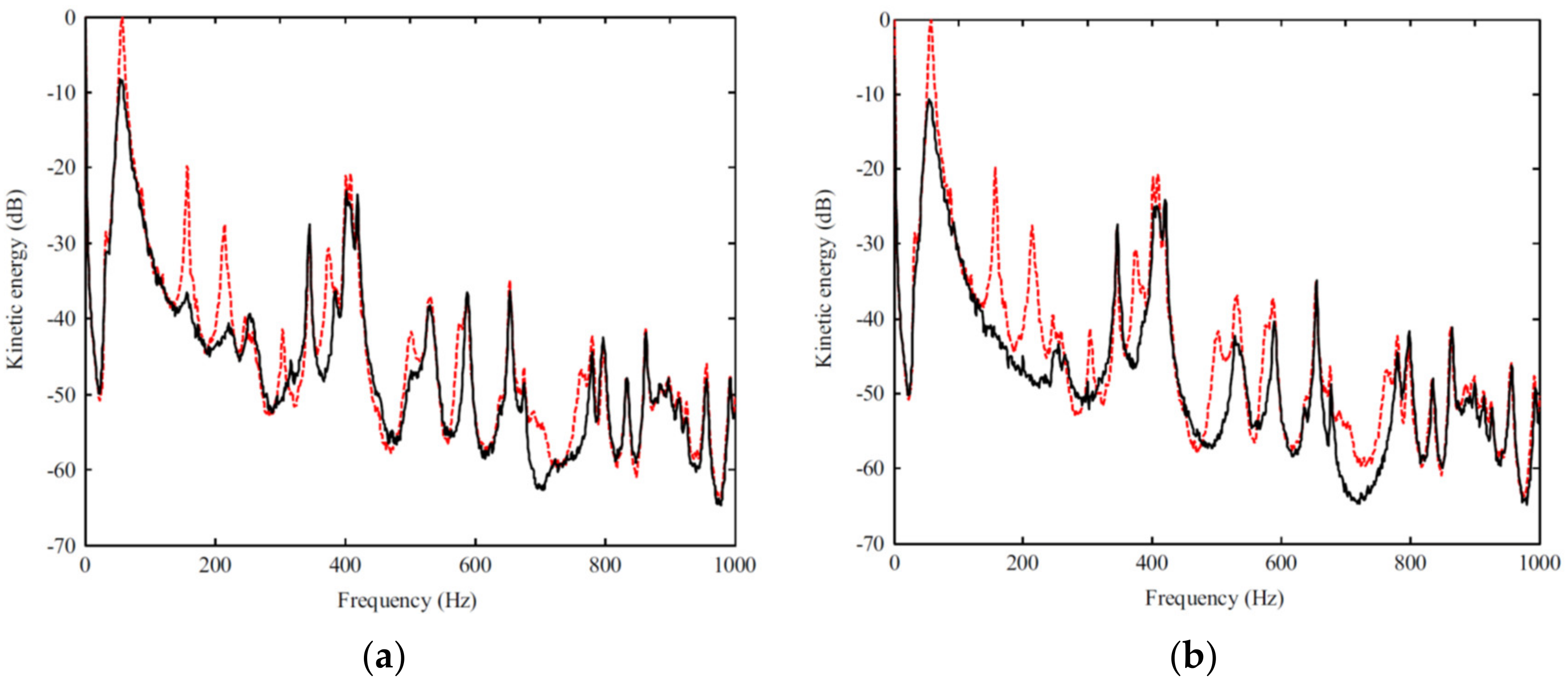
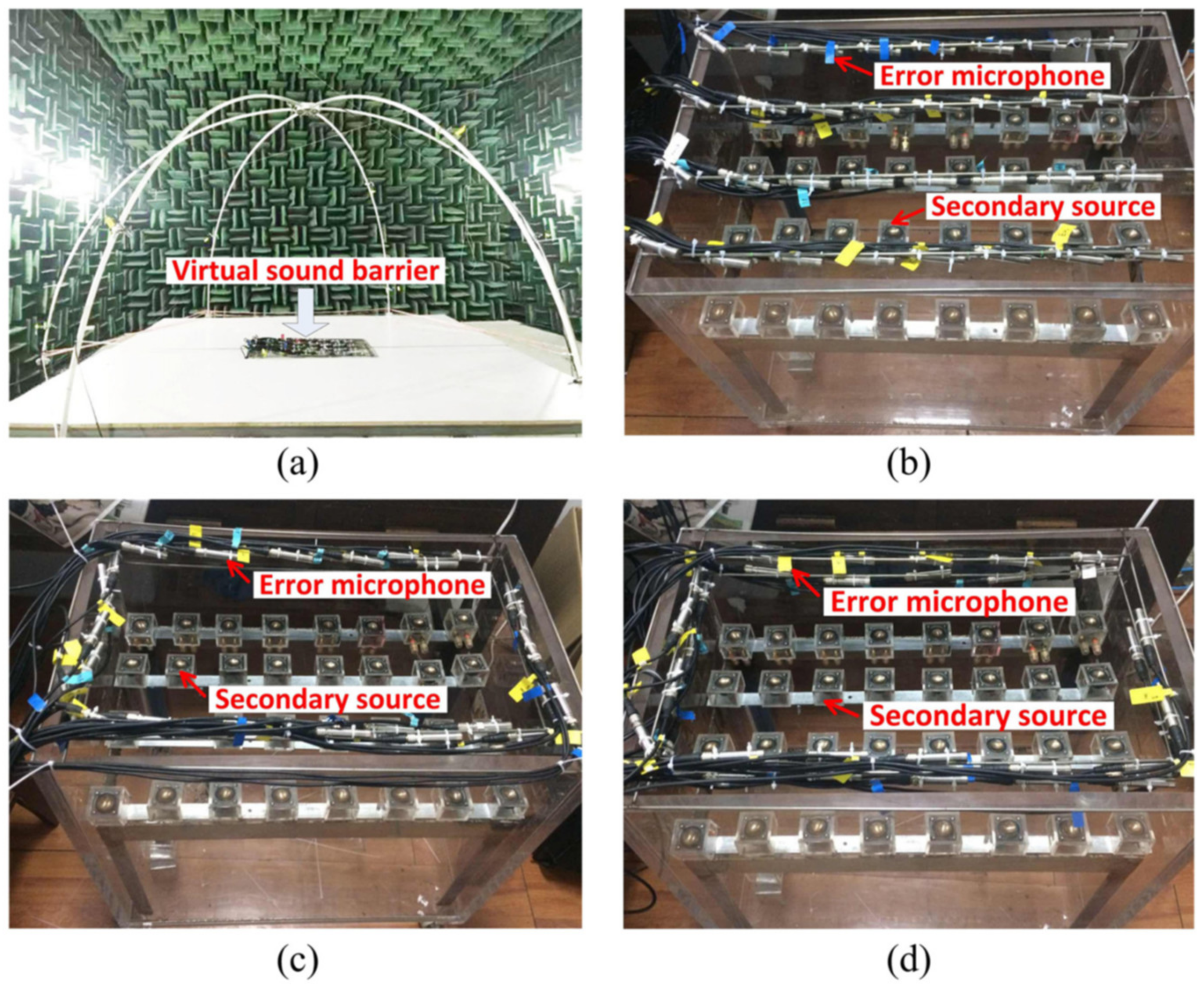
2.3. ANC in the Opening of Buildings
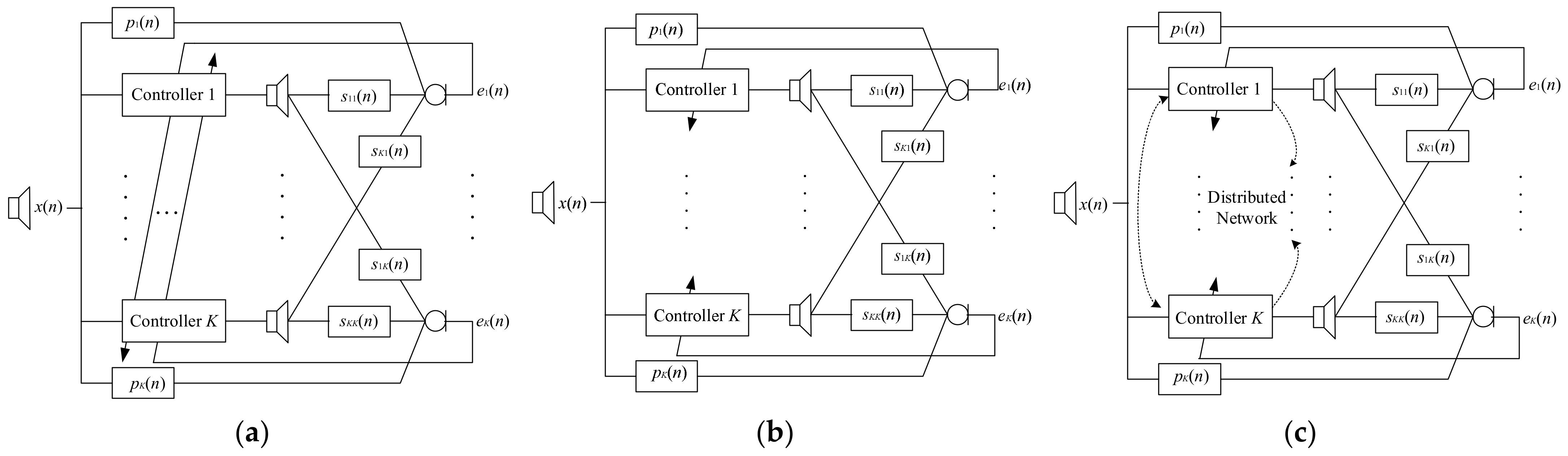
3. Three Active Control Strategies
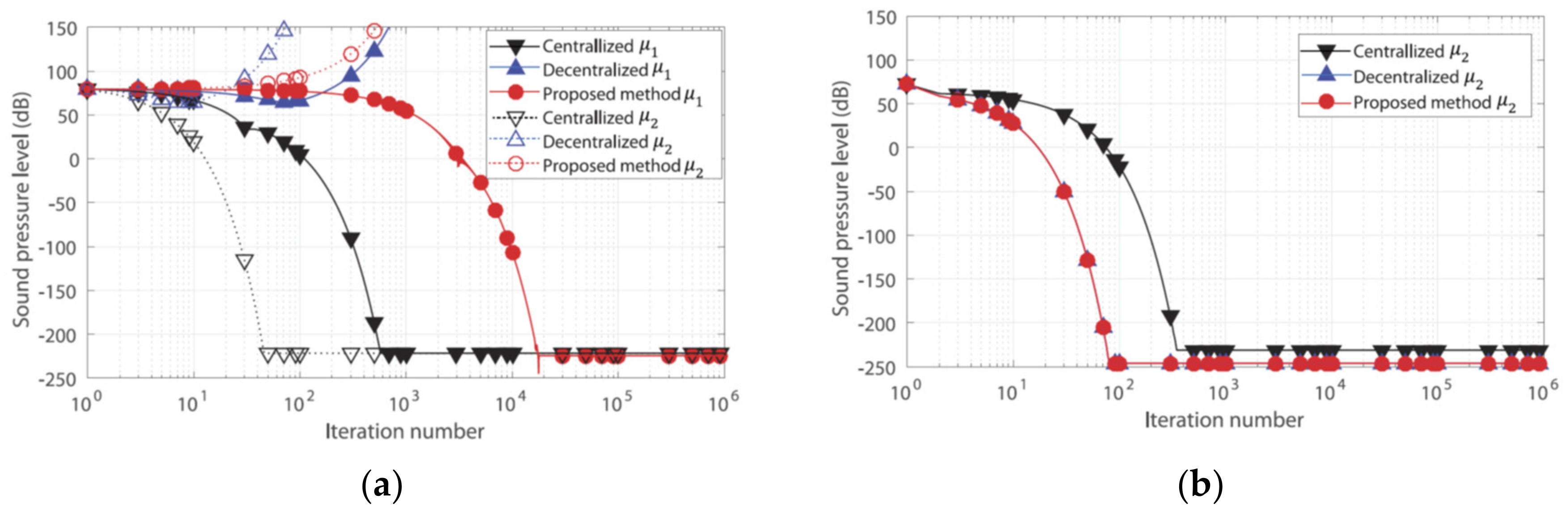
3.1. Decentralized Control
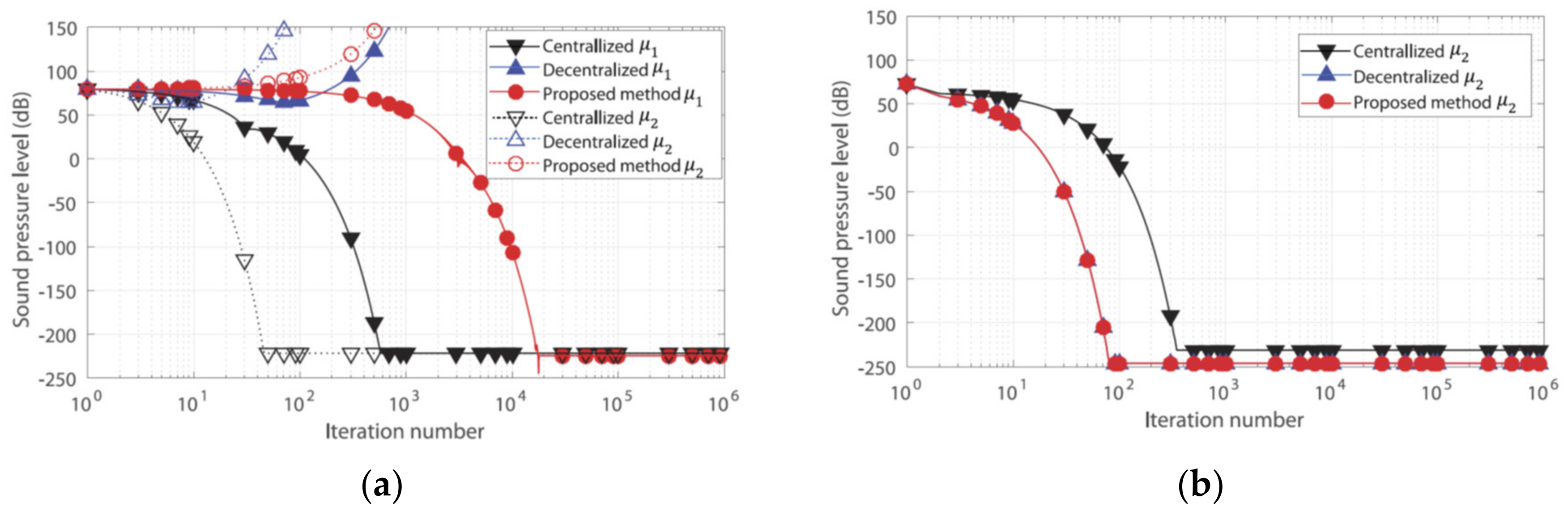
3.2. Distributed Control
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nelson, P.A.; Elliott, S.J. Active Control of Sound; Academic Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Kuo, S.M.; Morgan, D.R. Active Noise Control Systems: Algorithms and DSP Implementations; John Wiley & Son Inc.: Hoboken, NJ, USA, 1996. [Google Scholar]
- Hansen, C.H.; Snyder, S.D.; Qiu, X.; Brooks, L.; Moreau, D. Active Control of Noise and Vibration, 2nd ed.; CRC Press: London, UK, 2013. [Google Scholar]
- Bai, M.R.; Chen, H.Y.; Yang, L.H.; Huang, S.C. Active control of noise in a duct using the sparsely coded time-domain underdetermined multichannel inverse filters. J. Acoust. Soc. Am. 2019, 146, 1371–1381. [Google Scholar] [CrossRef] [PubMed]
- An, F.; Sun, H.; Li, X. Adaptive active control of periodic vibration using maglev actuators. J. Sound Vib. 2012, 331, 1971–1984. [Google Scholar] [CrossRef]
- Elliott, S.J.; Nelson, P.A. Active noise control. IEEE Signal Process. Mag. 1993, 10, 12–35. [Google Scholar] [CrossRef]
- Cao, Y.; Sun, H.; An, F.; Li, X. Active control of low-frequency sound radiation by cylindrical shell with piezoelectric stack force actuators. J. Sound Vib. 2012, 331, 2471–2484. [Google Scholar] [CrossRef]
- Wang, H.; Sun, H.; Sun, Y.; Wu, M.; Yang, J.; Li, X. A multi-tone active noise control system with a simplified local on-line secondary-path modeling. J. Acoust. Soc. Am. 2018, 144, EL515–EL521. [Google Scholar] [CrossRef]
- Wang, H.; Sun, H.; Sun, Y.; Wu, M.; Yang, J. A narrowband active noise control system with a frequency estimation algorithm based on parallel adaptive notch filter. Signal Process. 2019, 154, 108–119. [Google Scholar] [CrossRef]
- Ingard, U.; Lamb, G.L. Effect of a reflecting plane on the power output of sound sources. J. Acoust. Soc. Am. 1957, 29, 743–744. [Google Scholar] [CrossRef]
- Pan, J.; Qiu, X.; Paurobally, R. Effect of reflecting surfaces on the performance of active noise control. In Proceedings of the ACOUSTICS, Christchurch, New Zealand, 20–22 November 2006. [Google Scholar]
- Garcia-Bonito, J.; Elliott, S.J.; Bonilha, M. Active cancellation of pressure at a point in a pure tone diffracted diffuse sound field. J. Sound Vib. 1997, 201, 43–65. [Google Scholar] [CrossRef]
- Tao, J.; Wang, S.; Qiu, X.; Pan, J. Performance of a multichannel active sound radiation control system near a reflecting surface. Appl. Acoust. 2017, 123, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Bonito, J.; Elliot, S.J. Local active control diffracted diffuse sound fields. J. Acoust. Soc. Am. 1995, 98, 1017–1024. [Google Scholar] [CrossRef]
- Duda, R.O.; Martens, W.L. Range dependence of the response of a spherical head model. J. Acoust. Soc. Am. 1998, 104, 3048–3058. [Google Scholar] [CrossRef] [Green Version]
- Tao, J.; Guo, Q.; Qiu, X. A near-field error sensing strategy for compact multi-channel active sound radiation control in free field. J. Acoust. Soc. Am. 2019, 145, 2179–2187. [Google Scholar] [CrossRef]
- Zou, H.; Qiu, X. Performance analysis of the virtual sound barrier system with a diffracting sphere. Appl. Acoust. 2008, 69, 875–883. [Google Scholar] [CrossRef]
- Zou, H.; Qiu, X.; Lu, J.; Niu, F. A preliminary experimental study on virtual sound barrier system. J. Sound Vib. 2007, 307, 379–385. [Google Scholar] [CrossRef]
- Field, C.D.; Fricke, F.R. Theory and applications of quarter-wave resonators: A prelude to their use for attenuating noise entering buildings through ventilation openings. Appl. Acoust. 1998, 53, 117–132. [Google Scholar] [CrossRef]
- Parkins, J.; Sommerfeldt, S.; Tichy, J. Narrowband and broadband active control in an enclosure using the acoustic energy density. J. Acoust. Soc. Am. 2000, 108, 192–203. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Tao, J.; Qiu, X. Performance of a planar virtual sound barrier at the baffled opening of a rectangular cavity. J. Acoust. Soc. Am. 2015, 138, 2836–2847. [Google Scholar] [CrossRef]
- Wang, S.; Tao, J.; Qiu, X.; Pan, J. Mechanisms of active control of sound radiation from an opening with boundary installed secondary sources. J. Acoust. Soc. Am. 2018, 143, 3345–3351. [Google Scholar] [CrossRef]
- Lam, B.S.; Chuang, S.D.; Gan, W.S. Active control of sound through full-sized open windows. Build. Environ. 2018, 141, 16–27. [Google Scholar] [CrossRef]
- Wang, S.; Tao, J.; Qiu, X.; Pan, J. A boundary error sensing arrangement for virtual sound barriers to reduce noise radiation through openings. J. Acoust. Soc. Am. 2019, 145, 3695–3702. [Google Scholar] [CrossRef]
- Shi, D.Y.; Gan, W.S.; Lam, B.; Hasegawa, R.; Kajikawa, Y. Feedforward multichannel virtual-sensing active control of noise through an aperture: Analysis on causality and sensor-actuator constraints. J. Acoust. Soc. Am. 2020, 147, 32–48. [Google Scholar] [CrossRef]
- Zhang, C.X.; Qin, M.; Zou, H.S.; Qiu, X.J. Secondary source and error sensing strategies for the active control of sound transmission through a small opening. J. Sound Vib. 2020, 464, 114973. [Google Scholar] [CrossRef]
- Morgan, D.R. An analysis of multiple correlation cancellation loops with a filter in the auxiliary path. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 454–467. [Google Scholar] [CrossRef]
- Elliott, S.; Stothers, I.; Nelson, P. A multiple error LMS algorithm and its application to the active control of sound and vibration. IEEE Trans. Speech Signal Process. 1987, 35, 1423–1434. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; He, L.; Shuai, C.; Wang, F. Time-domain filtered-x-Newton narrowband algorithms for active isolation of frequency-fluctuating vibration. J. Sound Vib. 2016, 367, 1–21. [Google Scholar] [CrossRef]
- Wu, L.; Qiu, X.; Burnett, I.S.; Guo, Y. A recursive least square algorithm for active control of mixed noise. J. Sound Vib. 2015, 339, 1–10. [Google Scholar] [CrossRef]
- Tang, X.L.; Lee, C.M. Time–frequency-domain filtered-x LMS algorithm for active noise control. J. Sound Vib. 2012, 331, 5002–5011. [Google Scholar] [CrossRef]
- Wu, M. An overlap-save frequency-domain implementation of the delayless subband ANC algorithm. IEEE Trans. Audio Speech Lang. Process. 2008, 16, 1706–1710. [Google Scholar] [CrossRef]
- Elliott, S.J.; Boucher, C.C. Interaction between multiple feedforward active control systems. IEEE Trans. Speech Audio Process. 1994, 2, 521–530. [Google Scholar] [CrossRef]
- Ferrer, M.; Diego, M.; Pinero, G.; Gonzalez, A. Active noise control over adaptive distributed networks. Signal Process. 2015, 107, 82–95. [Google Scholar] [CrossRef]
- Ferrer, M.; Gonzalez, A.; de Diego, M.; Piñero, G. Distributed affine projection algorithm over acoustically coupled sensor networks. IEEE Trans. Signal Process. 2017, 65, 6423–6434. [Google Scholar] [CrossRef] [Green Version]
- Engels, W.P.; Baumann, O.N.; Elliott, S.J. Centralized and decentralized control of structural vibration and sound radiation. J. Acoust. Soc. Am. 2006, 119, 1487–1495. [Google Scholar] [CrossRef] [Green Version]
- Leboucher, E.; Micheau, P.; Berry, A.; L’Esperance, A. A stability analysis of a decentralized adaptive feedback active control system of a sinusoidal sound in free space. J. Acoust. Soc. Am. 2002, 111, 189–199. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baumann, O.N.; Elliott, S.J.; Berry, A. The stability of decentralized multichannel velocity feedback controllers using inertial actuators. J. Acoust. Soc. Am. 2002, 111, 189–199. [Google Scholar] [CrossRef]
- Zhang, L.; Tao, J.; Qiu, X. Performance analysis of decentralized multi-channel feedback systems for active noise control in free space. Appl. Acoust. 2013, 74, 181–188. [Google Scholar] [CrossRef]
- An, F.; Sun, H.; Li, X.; Tian, J. Optimization of parameters in decentralized adaptive active control algorithm. J. Vib. Eng. 2013, 26, 48–54. [Google Scholar]
- Cao, Y.; Sun, H.; An, F.; Li, X. Virtual absorbed energy in decentralized velocity feedback control of a plate with piezoelectric patch actuators. Appl. Acoust. 2013, 74, 909–919. [Google Scholar] [CrossRef]
- Cao, Y.; Sun, H.; Li, X. A novel decentralized feedforward control strategy for a plate vibration without secondary path modeling using piezo electric patch actuator. J. Vib. Shock 2014, 33, 98–104. [Google Scholar]
- Yu, Y.; Sun, H.; Cao, Y.; An, F.; Yang, J. Experimental validation of virtual absorbed energy of piezoelectric patch actuators in decentralized velocity feedback control of a plate. J. Sound Vib. 2015, 341, 1–15. [Google Scholar] [CrossRef]
- Zhang, G.; Tao, J.; Qiu, X.; Burnett, I. Decentralized Two-Channel Active Noise Control for Single Frequency by Shaping Matrix Eigenvalues. IEEE/ACM Trans. Audio Speech Lang. Process. 2019, 27, 44–52. [Google Scholar] [CrossRef]
- Wang, K.; Tao, J.; Qiu, X. A time domain decentralized algorithm for two channel active noise control. J. Acoust. Soc. Am. 2020, 147, 3808–3813. [Google Scholar]
- Lopes, C.; Sayed, A. Incremental adaptive strategies over distributed networks. IEEE Trans. Signal Process. 2007, 55, 4064–4077. [Google Scholar] [CrossRef]
- Lopes, C.; Sayed, A. Diffusion least-mean squares over adaptive networks: Formulation and performance analysis. IEEE Trans. Signal Process. 2008, 56, 3122–3136. [Google Scholar] [CrossRef]
- Chu, Y.J.; Mak, C.M.; Zhao, Y.; Chan, S.C.; Wu, M. Performance analysis of a diffusion control method for ANC systems and the network design. J. Sound Vib. 2020, 475, 1–17. [Google Scholar] [CrossRef]
- Wu, L.F.; Qiu, X.J.; Guo, Y.C.; Chan, S.C.; Wu, M. A generalized leaky FxLMS algorithm for tuning the waterbed effect of feedback active noise control systems. Mech. Syst. Signal Process. 2018, 106, 13–23. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel Number | 2-Channel | 3-Channel | 4-Channel |
|---|---|---|---|
| Cross frequency (Hz) | 970 | 1180 | 1280 |
| Optimal NR in free space (dB) | 4.7 | 8.5 | 10 |
| Optimal NR with a reflecting surface (dB) | 6.4 | 17.0 | 28 |
| Improvement of the optimal NR (dB) | 1.7 | 8.5 | 18 |
| Evenly Distributed | Single-Layer | Double-Layer | |
|---|---|---|---|
| Upper-Limit Frequency (simulation) | - | Low | High |
| Averaged NR from 500 to 1000 Hz (experiments) | High | Low | Medium |
| Ventilation and lighting | Good | Better than distributed arrangement | |
| Centralized FxLMS | Decentralized FxLMS | Distributed FxLMS | |
|---|---|---|---|
| Cost function | |||
| Performance in general cases | High | Low | Close to centralized FxLMS |
| Complexity | High | Low | Low |
| Centralized FxLMS | Decentralized FxLMS | Distributed FxLMS | |
|---|---|---|---|
| Secondary path modeling | K2 | K | K |
| Adaptive filter | K2L | KL | KL |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, Y.; Wu, M.; Sun, H.; Yang, J.; Chen, M. Some Practical Acoustic Design and Typical Control Strategies for Multichannel Active Noise Control. Appl. Sci. 2022, 12, 2244. https://doi.org/10.3390/app12042244
Chu Y, Wu M, Sun H, Yang J, Chen M. Some Practical Acoustic Design and Typical Control Strategies for Multichannel Active Noise Control. Applied Sciences. 2022; 12(4):2244. https://doi.org/10.3390/app12042244
Chicago/Turabian StyleChu, Yijing, Ming Wu, Hongling Sun, Jun Yang, and Mingyang Chen. 2022. "Some Practical Acoustic Design and Typical Control Strategies for Multichannel Active Noise Control" Applied Sciences 12, no. 4: 2244. https://doi.org/10.3390/app12042244
APA StyleChu, Y., Wu, M., Sun, H., Yang, J., & Chen, M. (2022). Some Practical Acoustic Design and Typical Control Strategies for Multichannel Active Noise Control. Applied Sciences, 12(4), 2244. https://doi.org/10.3390/app12042244