
Analysis and Optimal Design of a WPT Coupler for Underwater Vehicles Using Non-Dominated Sorting Genetic Algorithm


Abstract
:1. Introduction
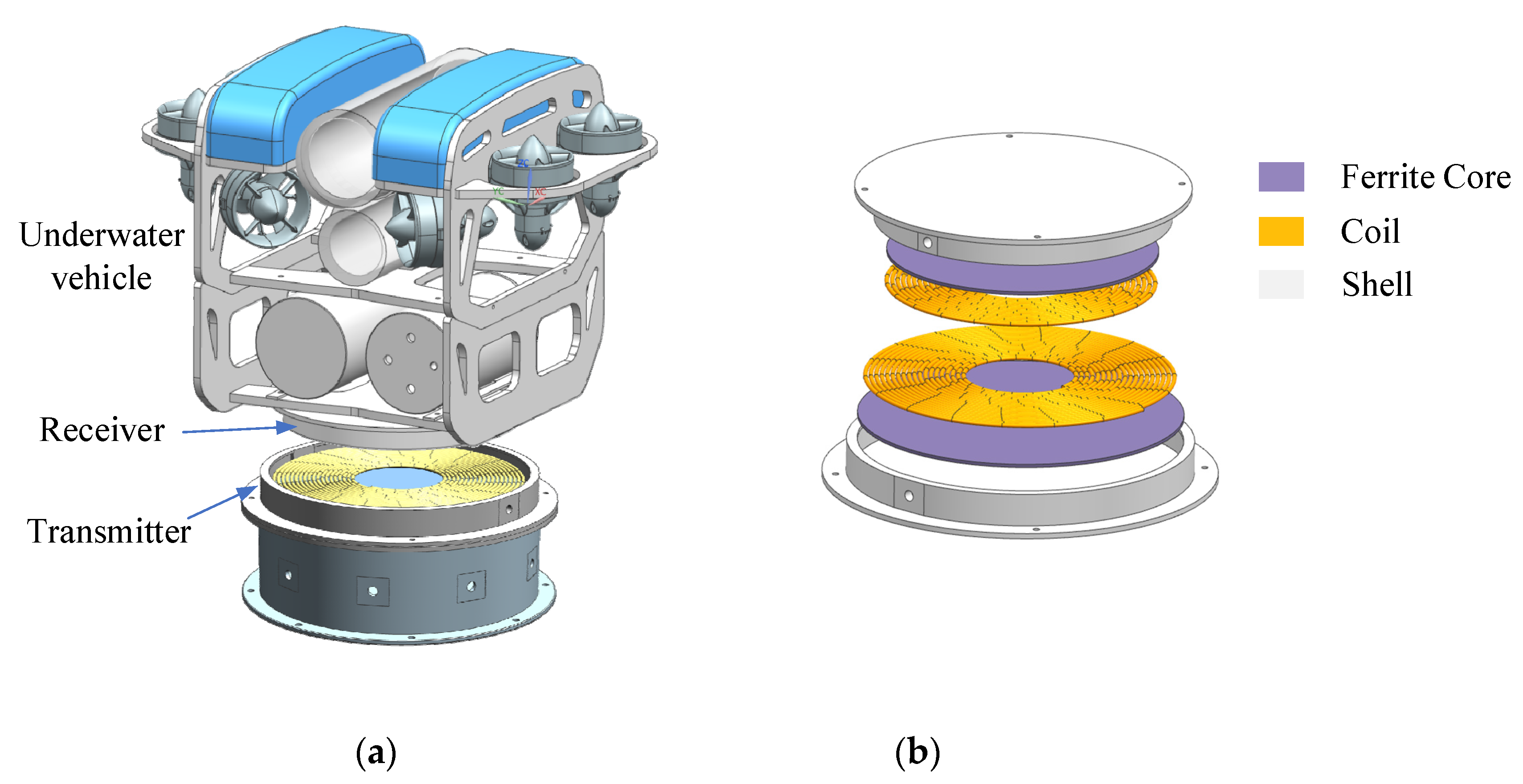
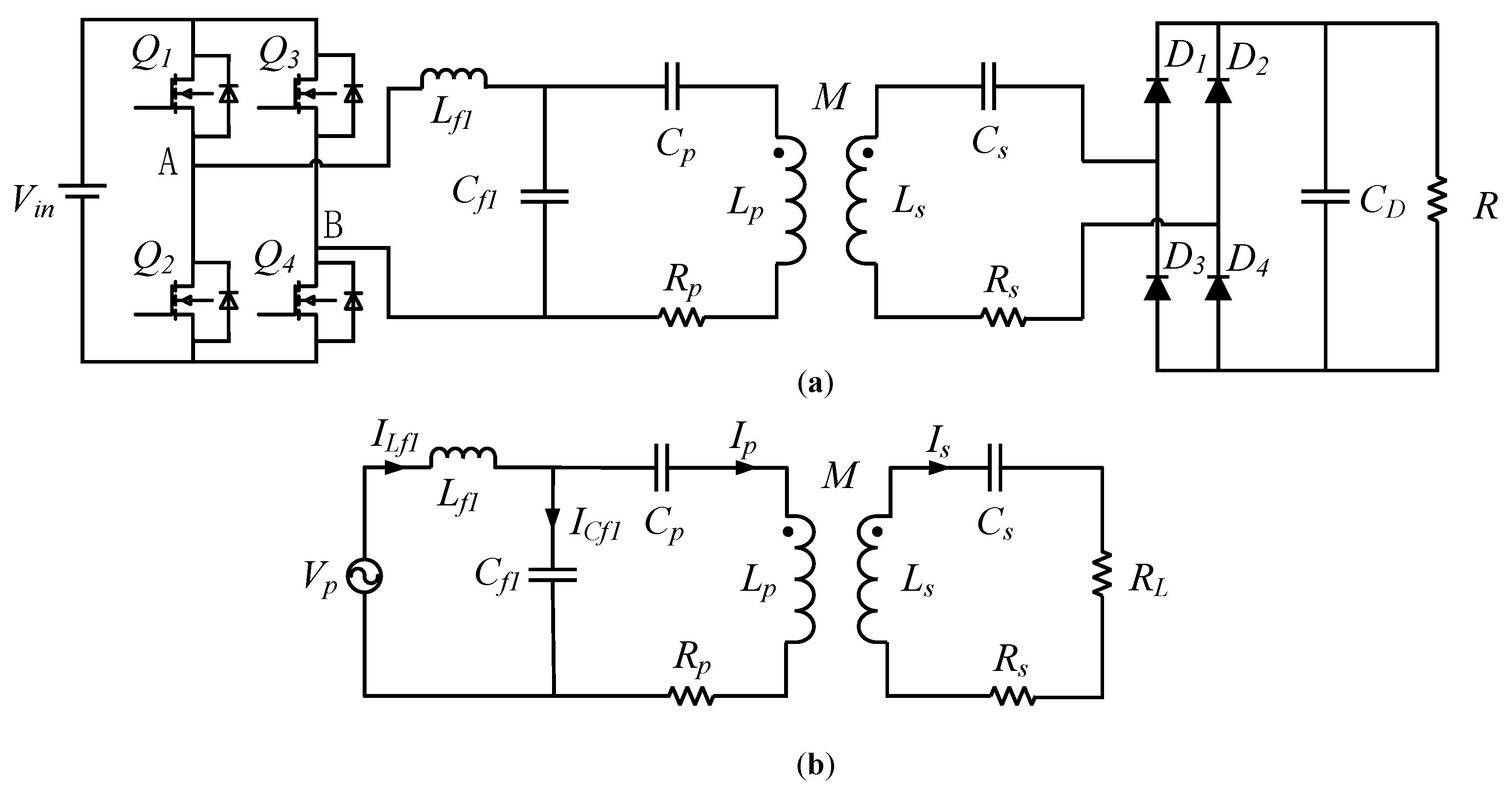
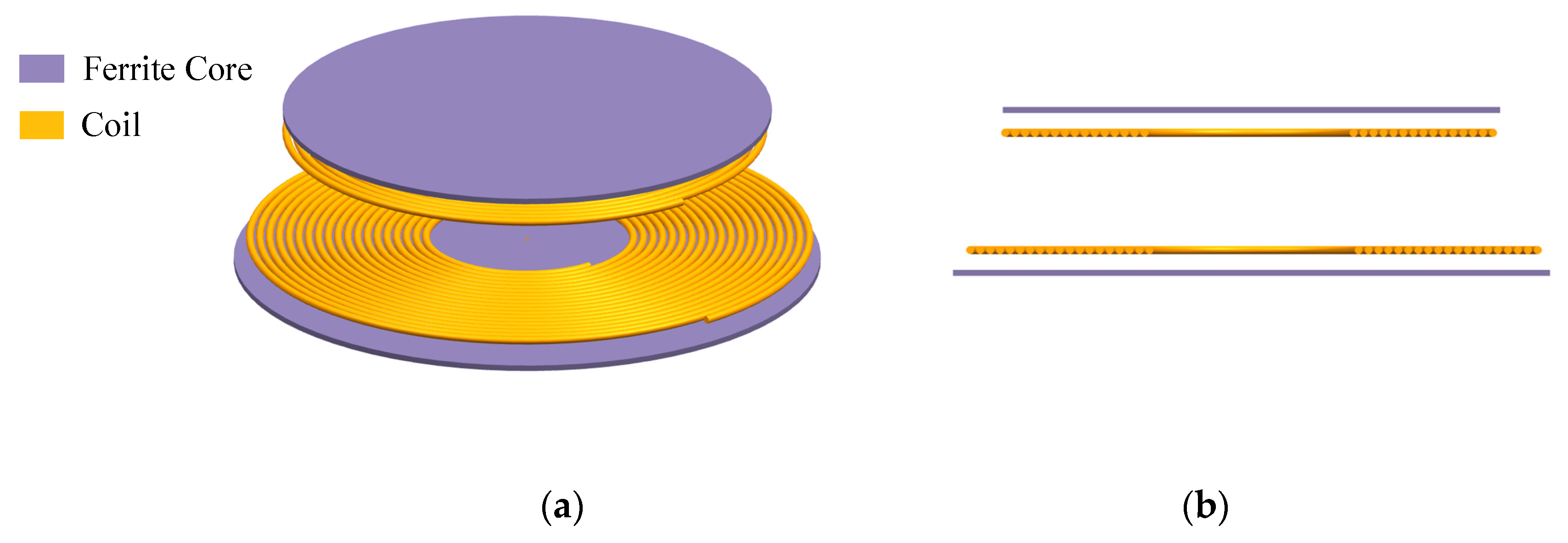
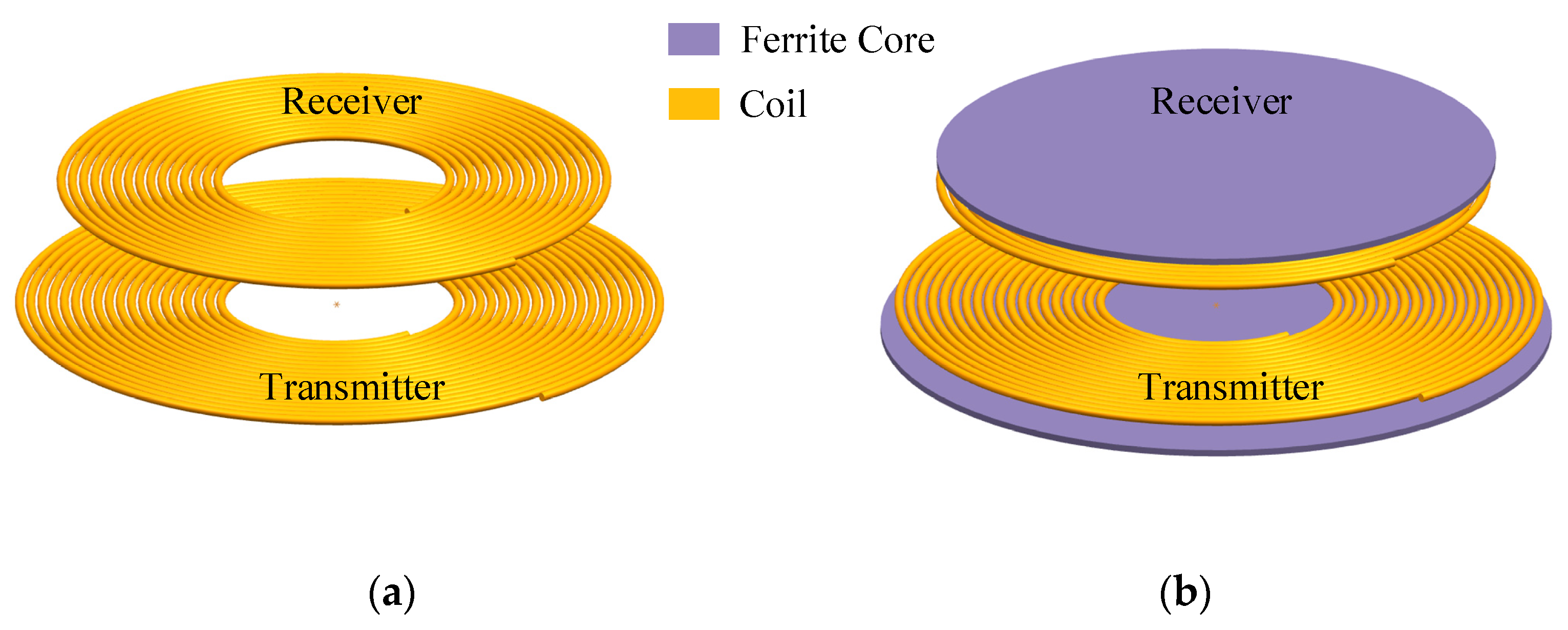
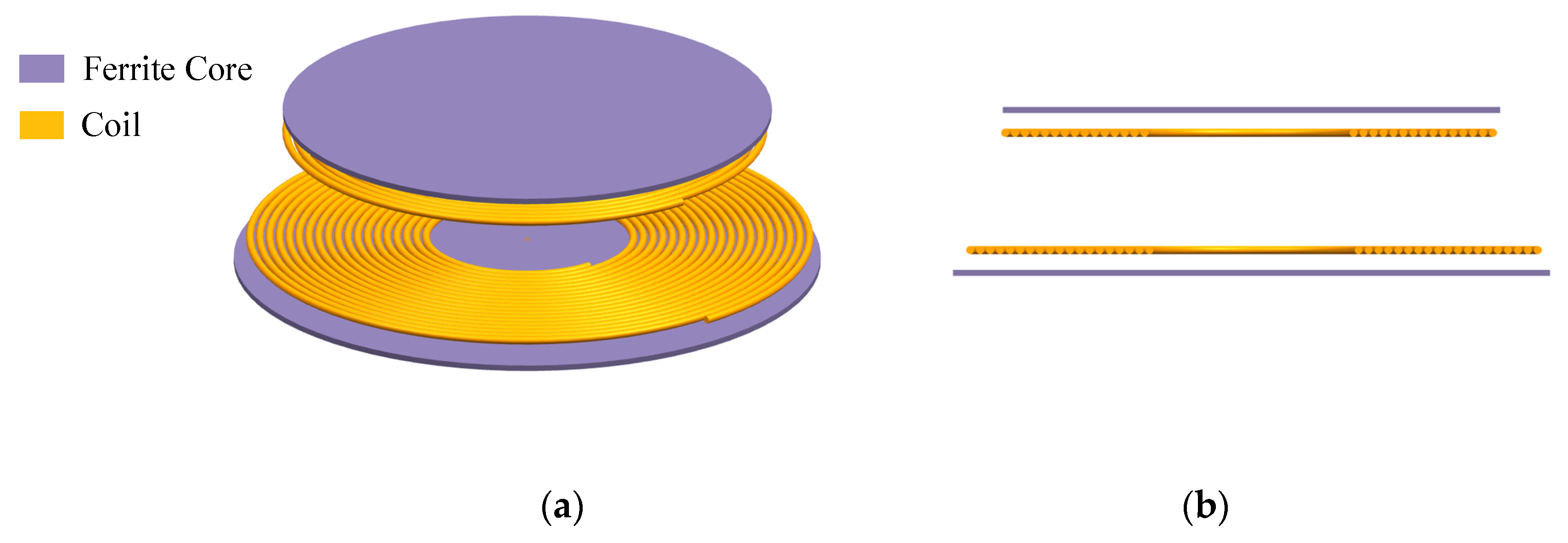
2. Coupler Structure and Circuit Topology
3. Wireless Power Transfer System in Seawater
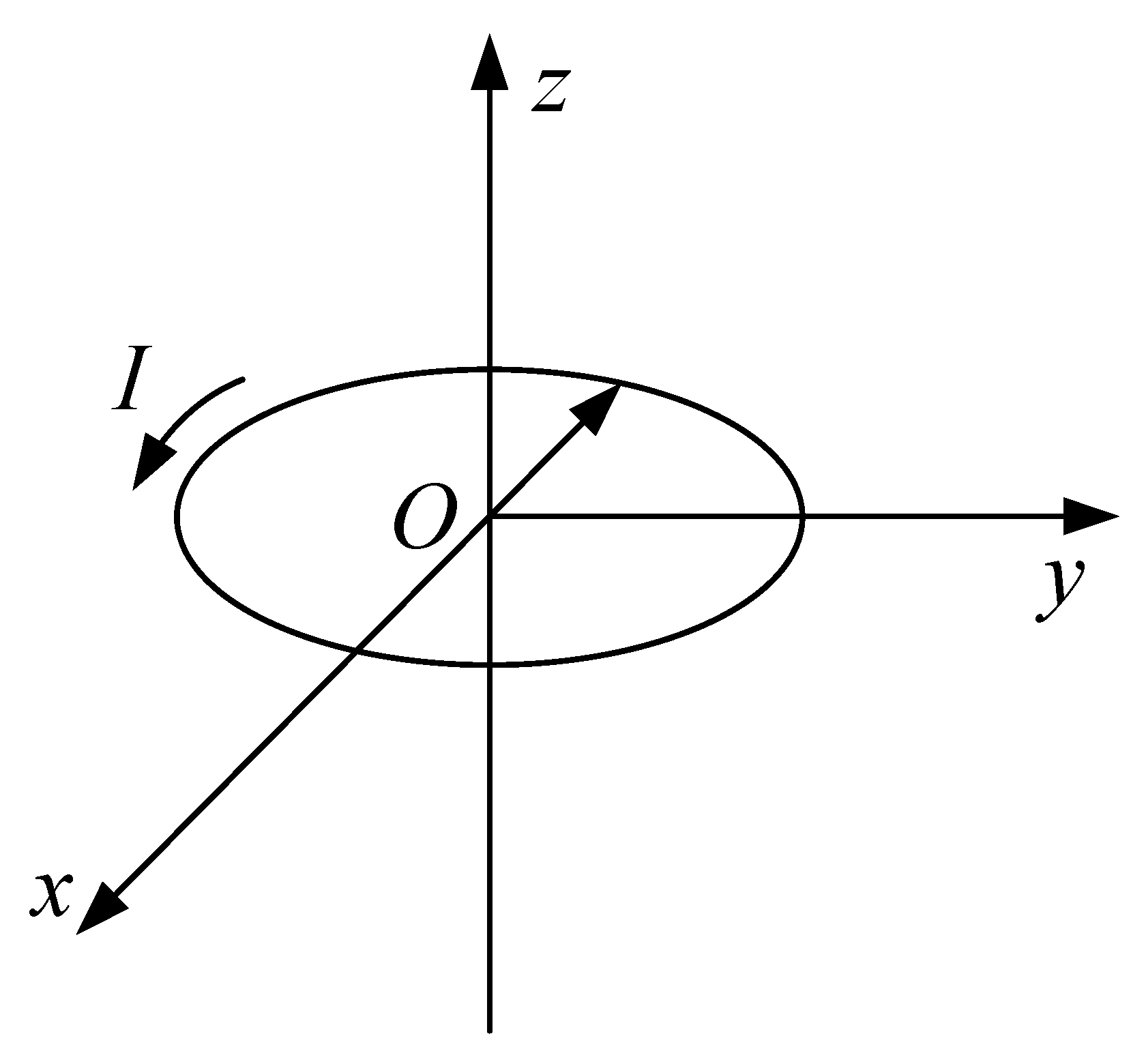
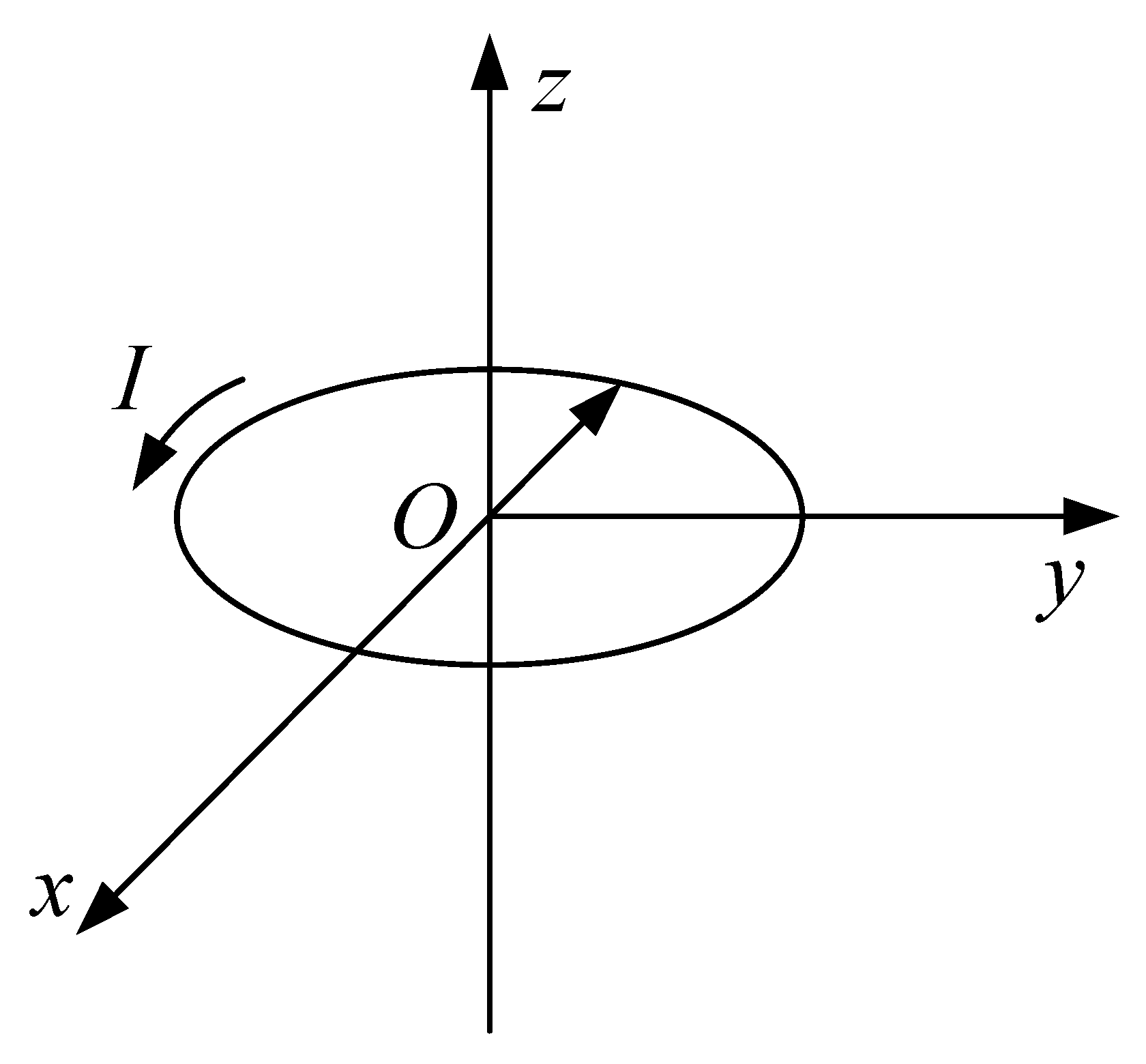
3.1. Electric Field Intensity
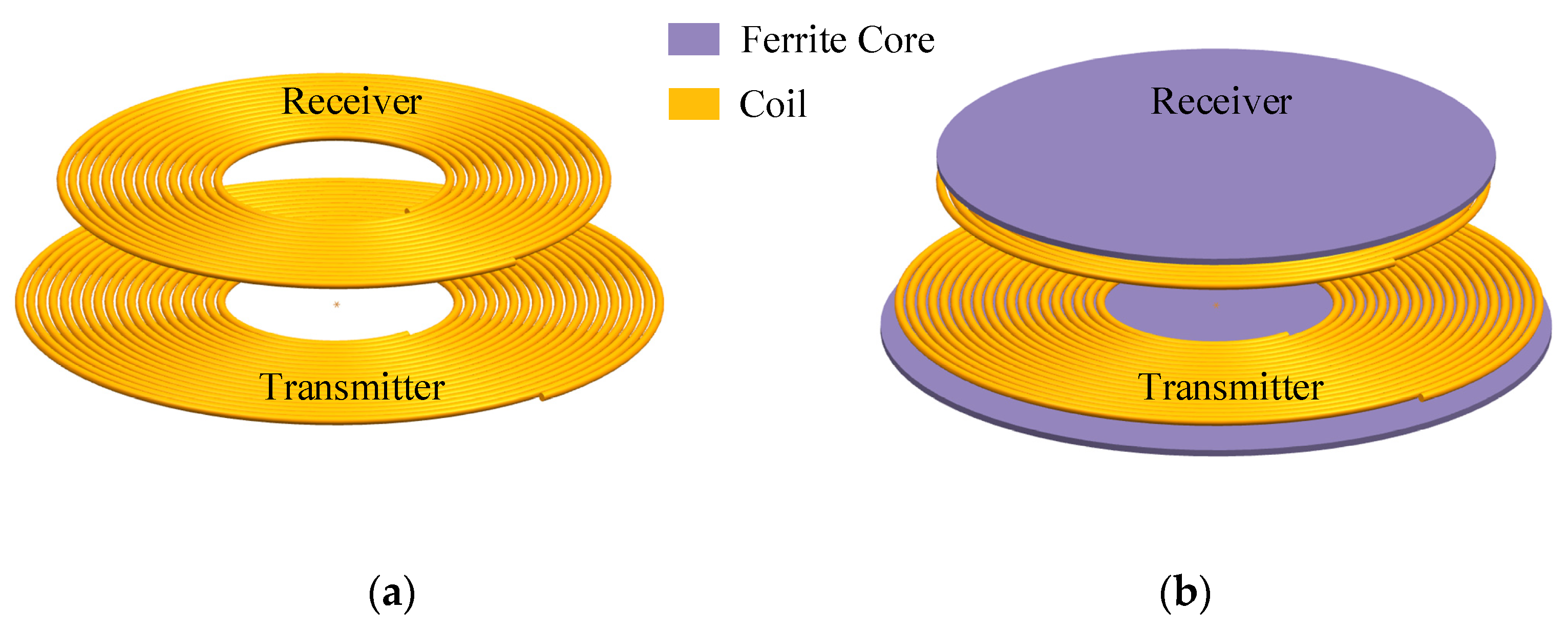
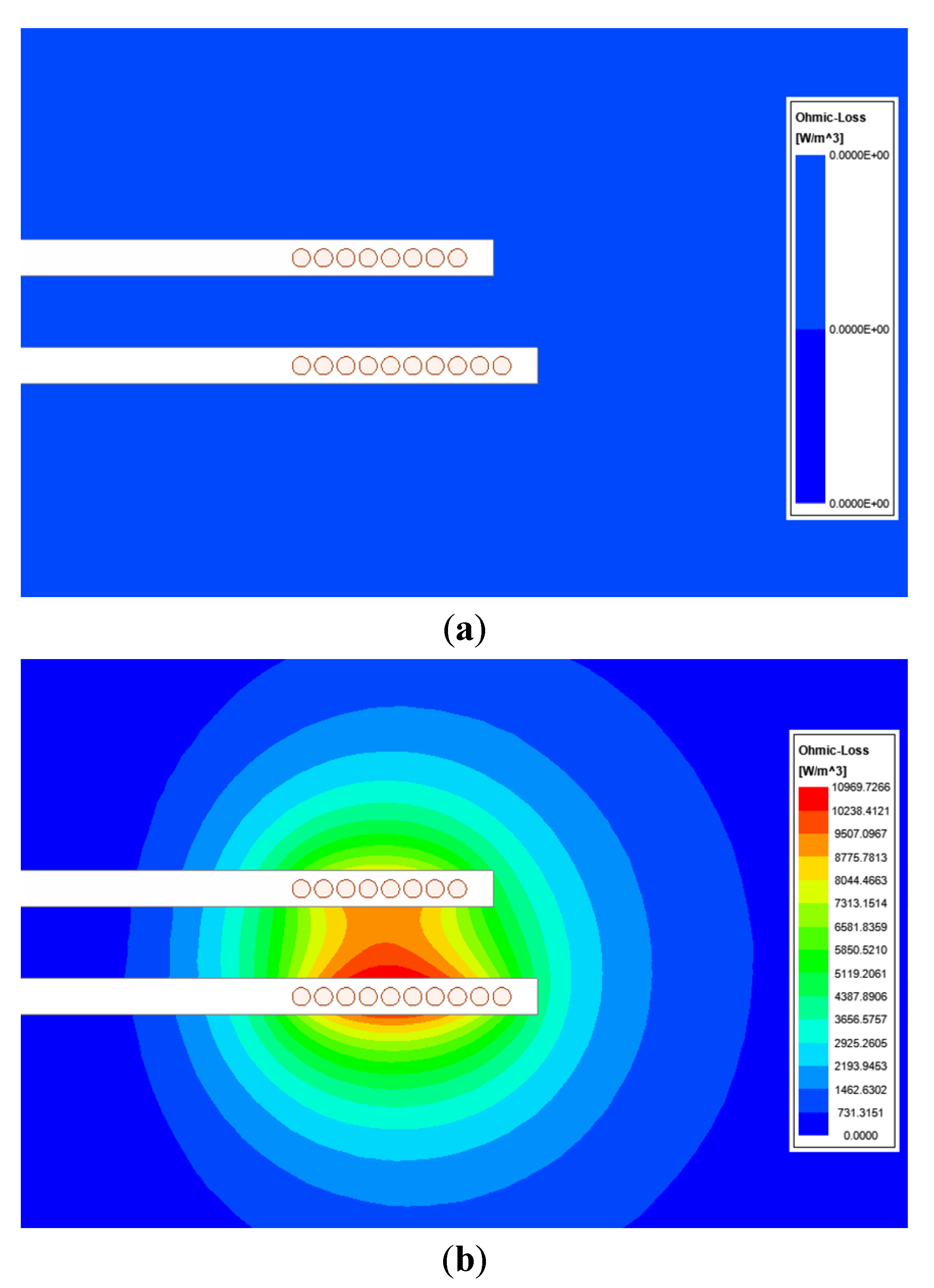
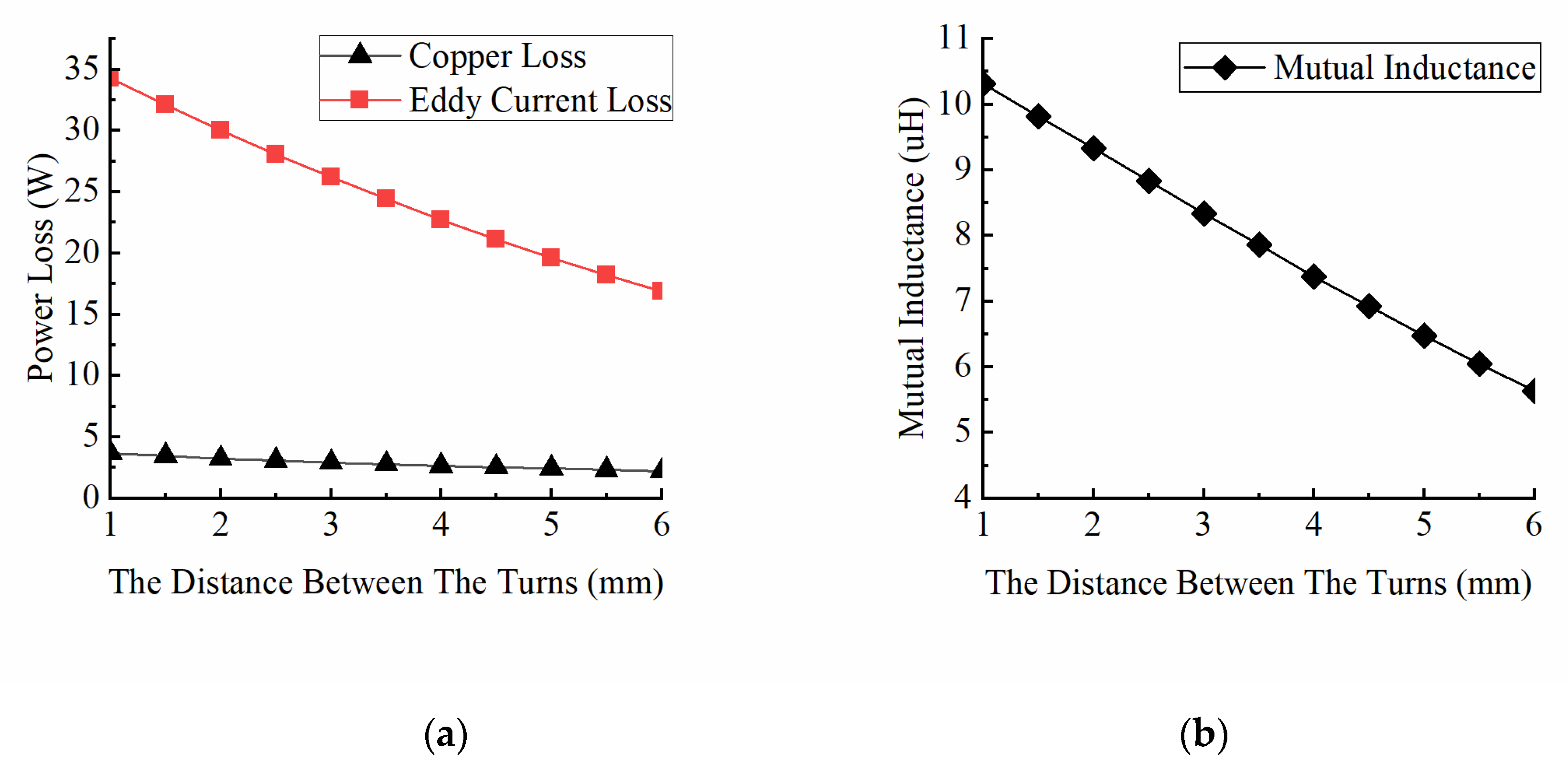
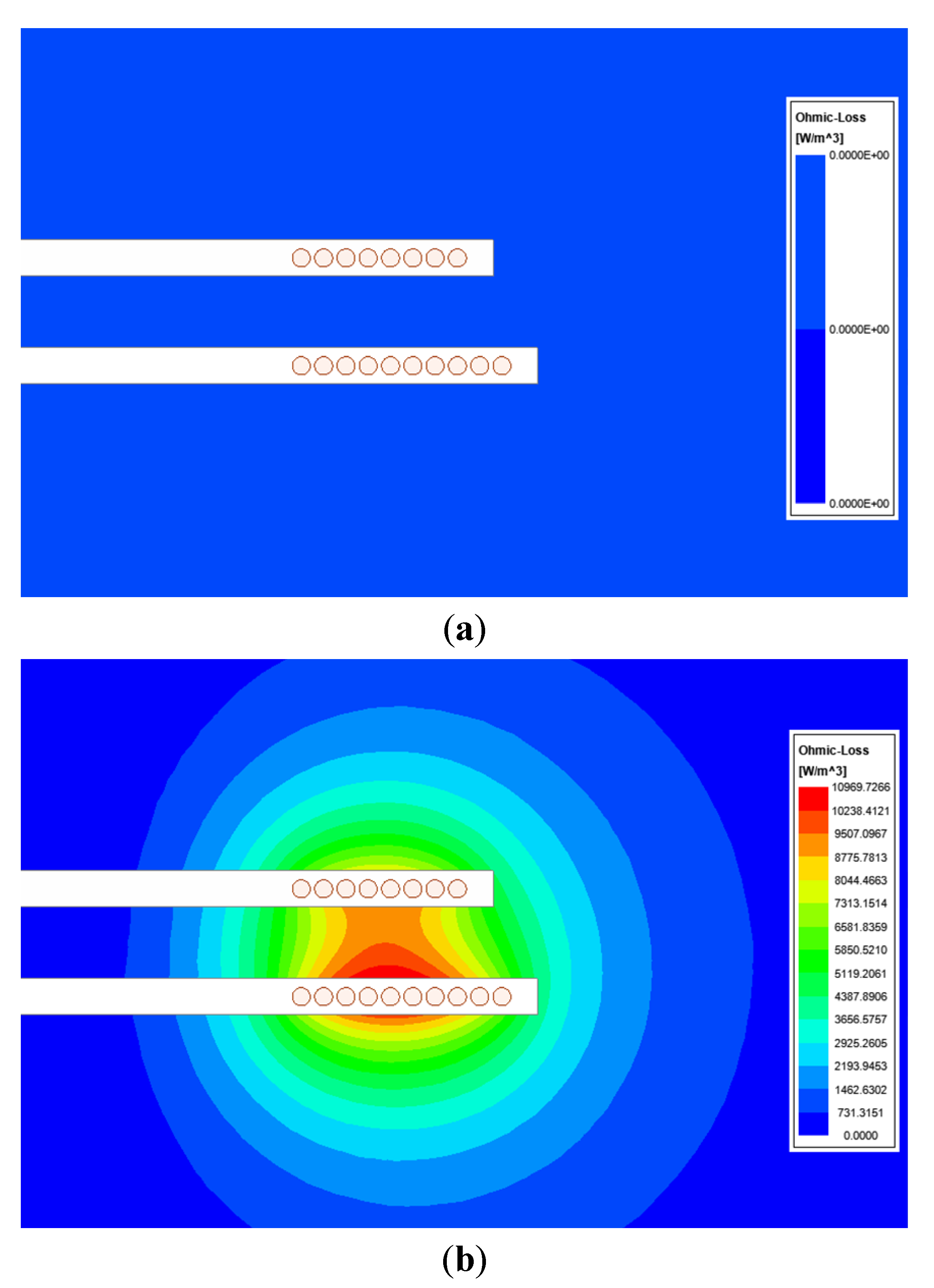
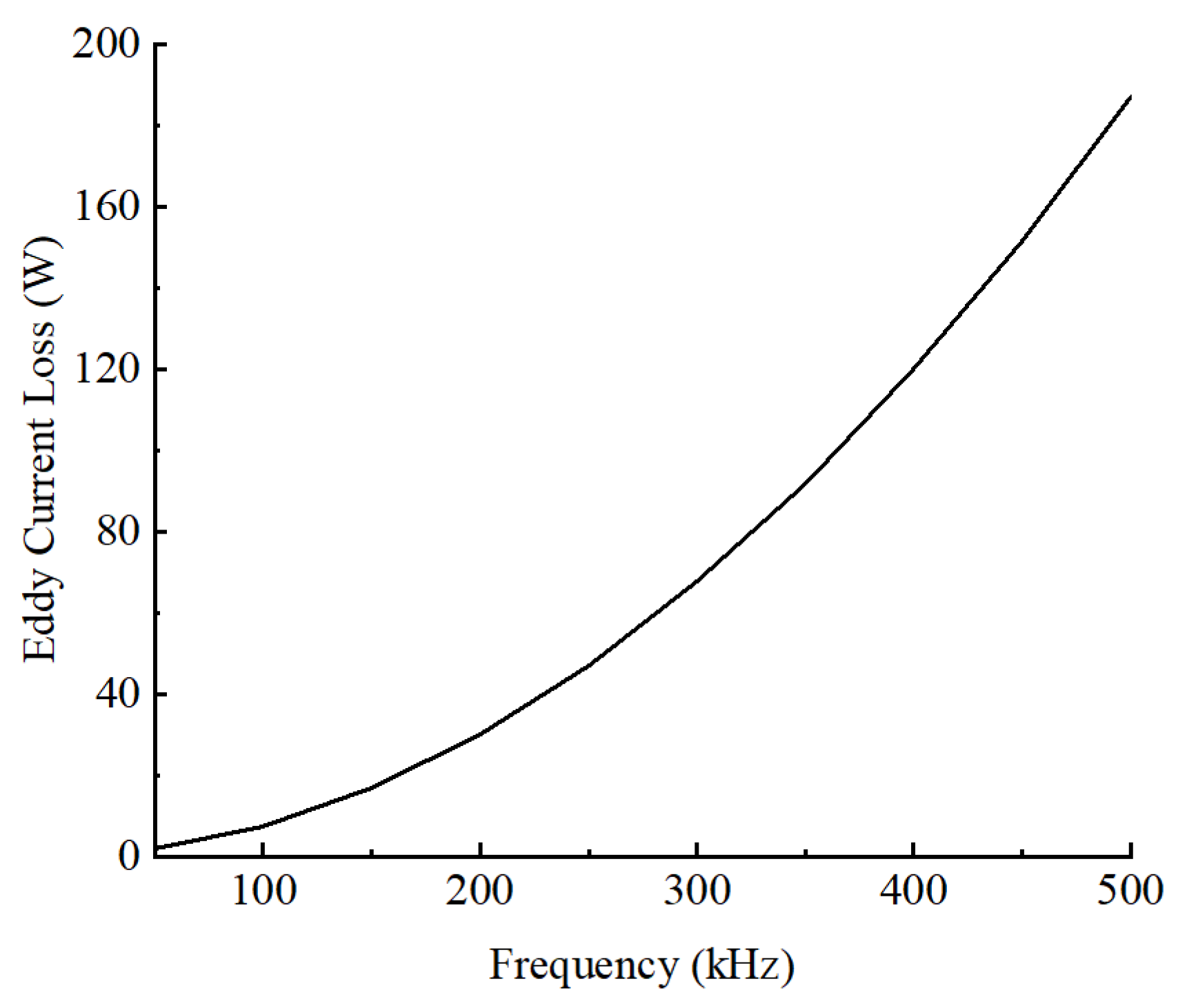
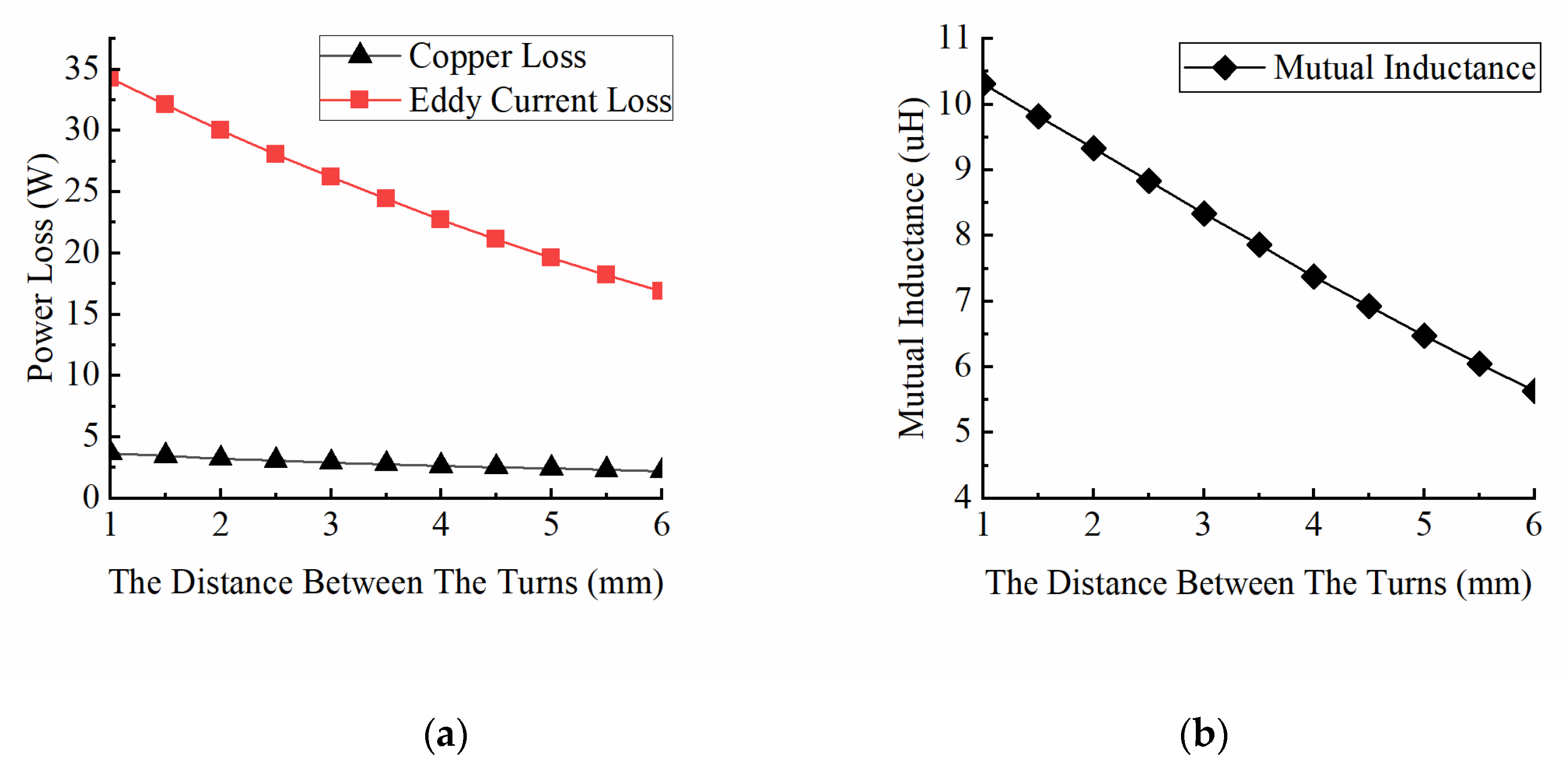
3.2. Power Loss of Coreless Coupler
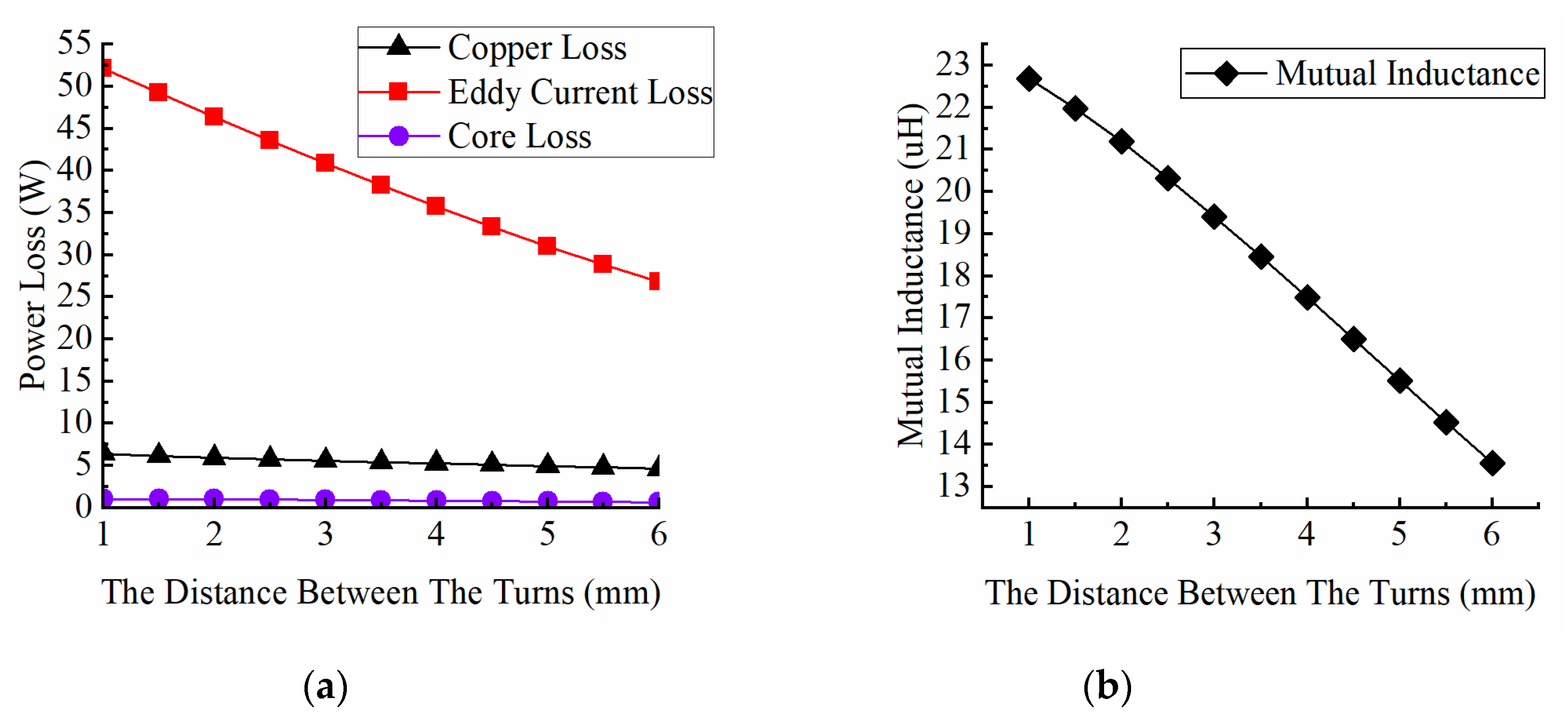
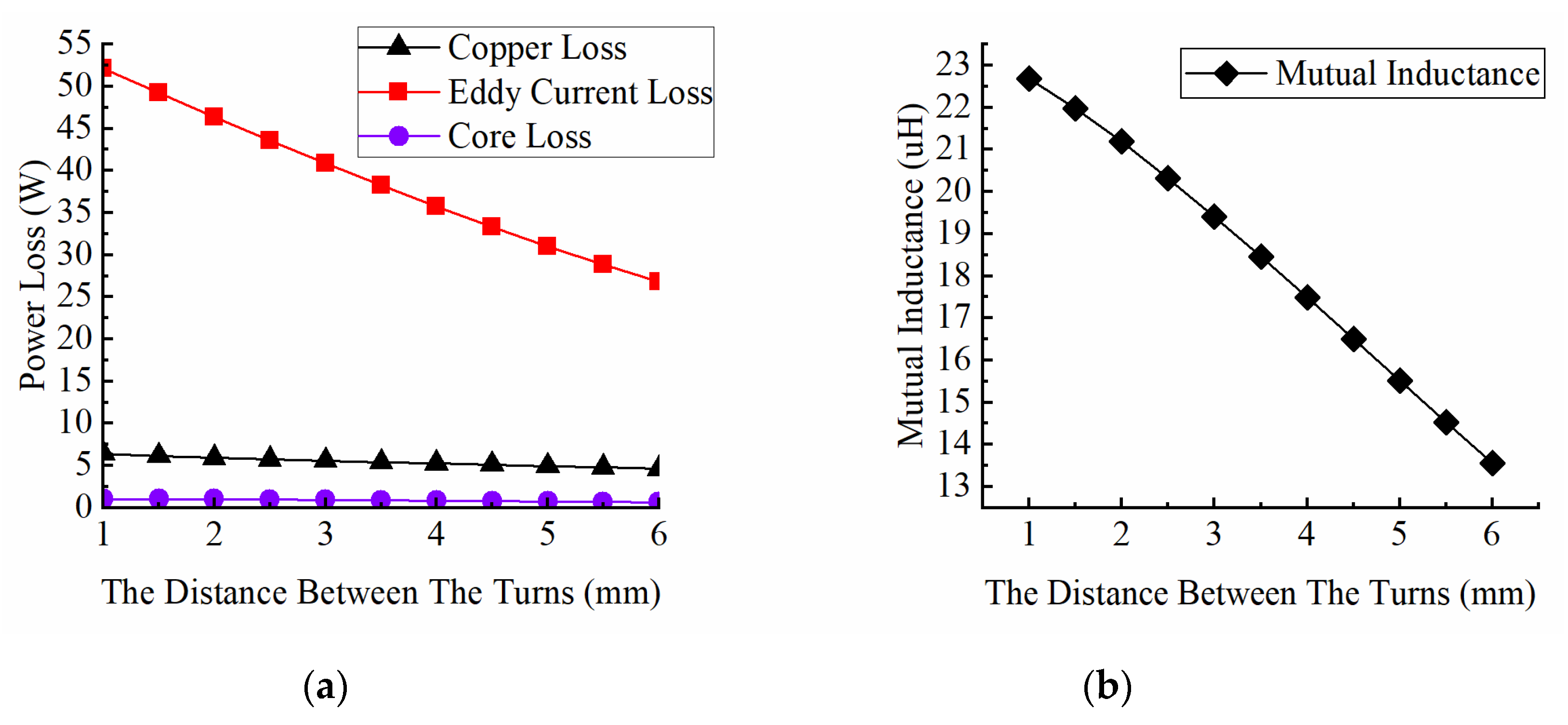
3.3. Power Loss of Coupler with Ferrite Core
3.4. Equivalent Coupler Loss Impedance (ECLI)
4. Optimization Process Using NSGA-II
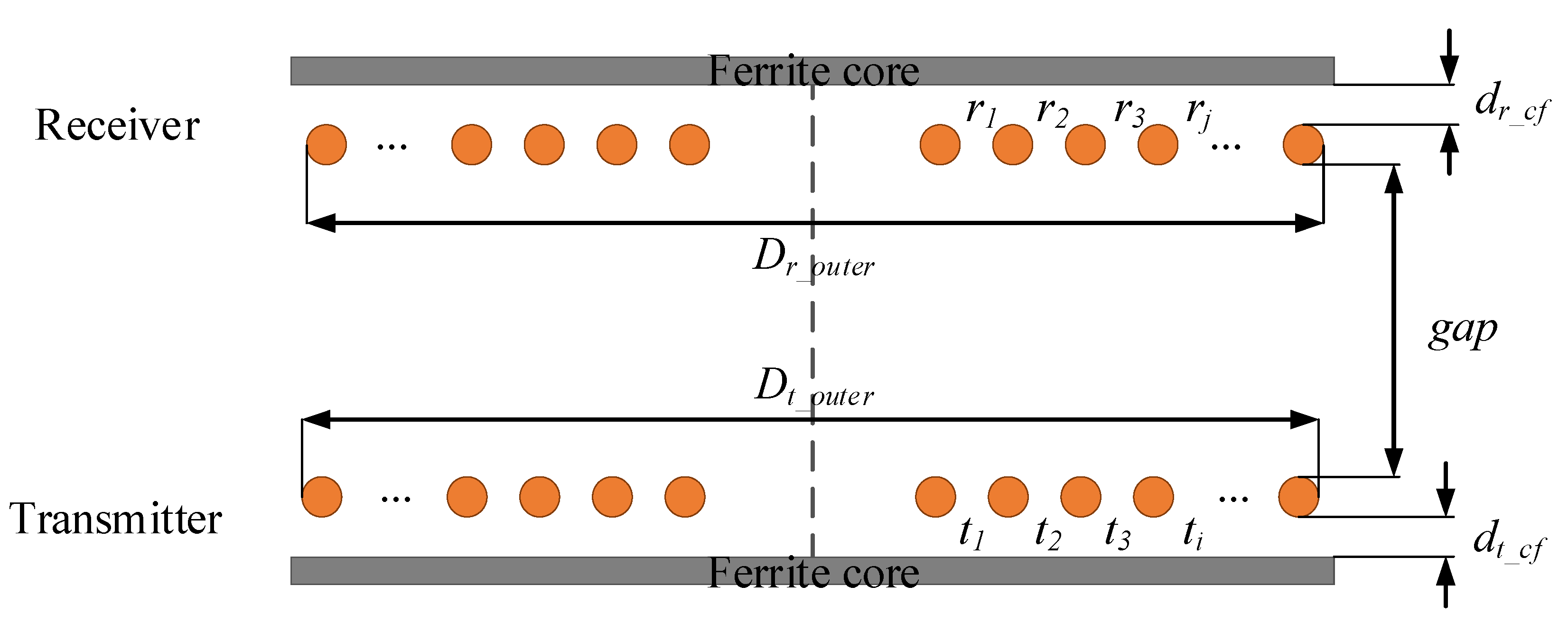
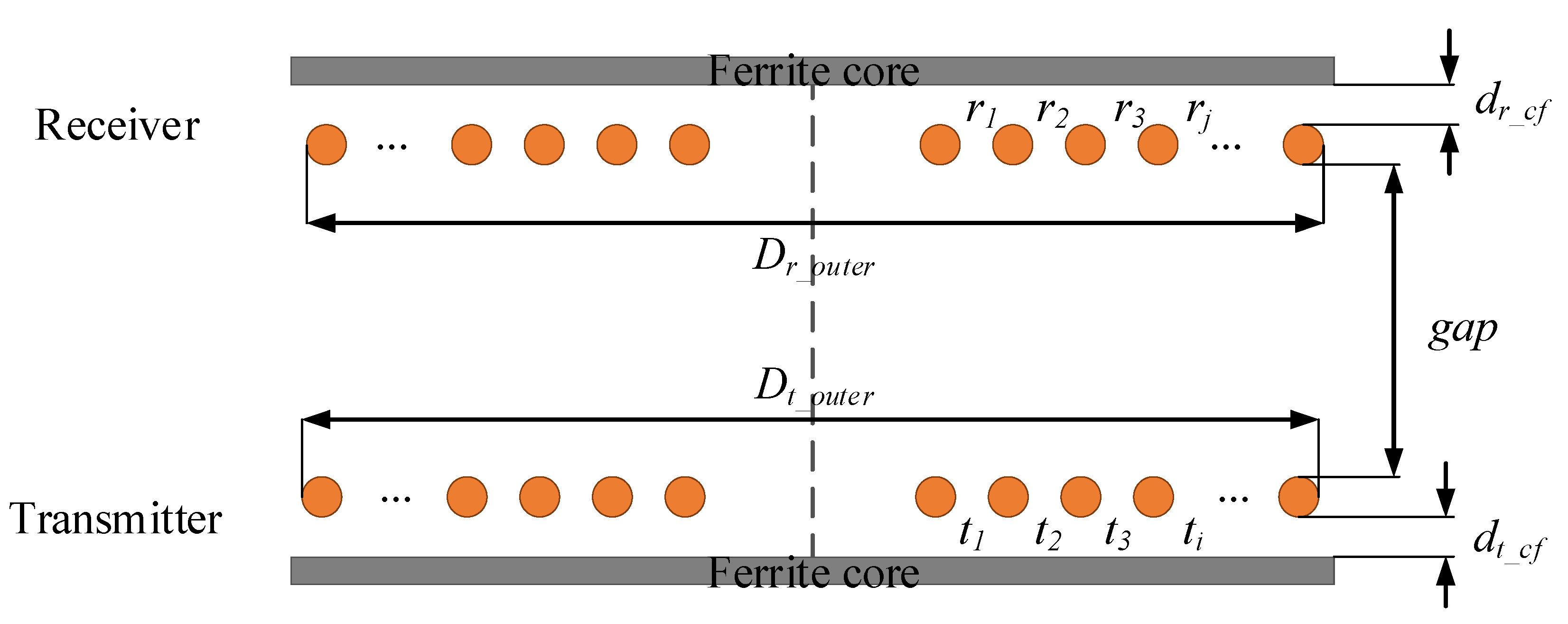
4.1. Parametric Model
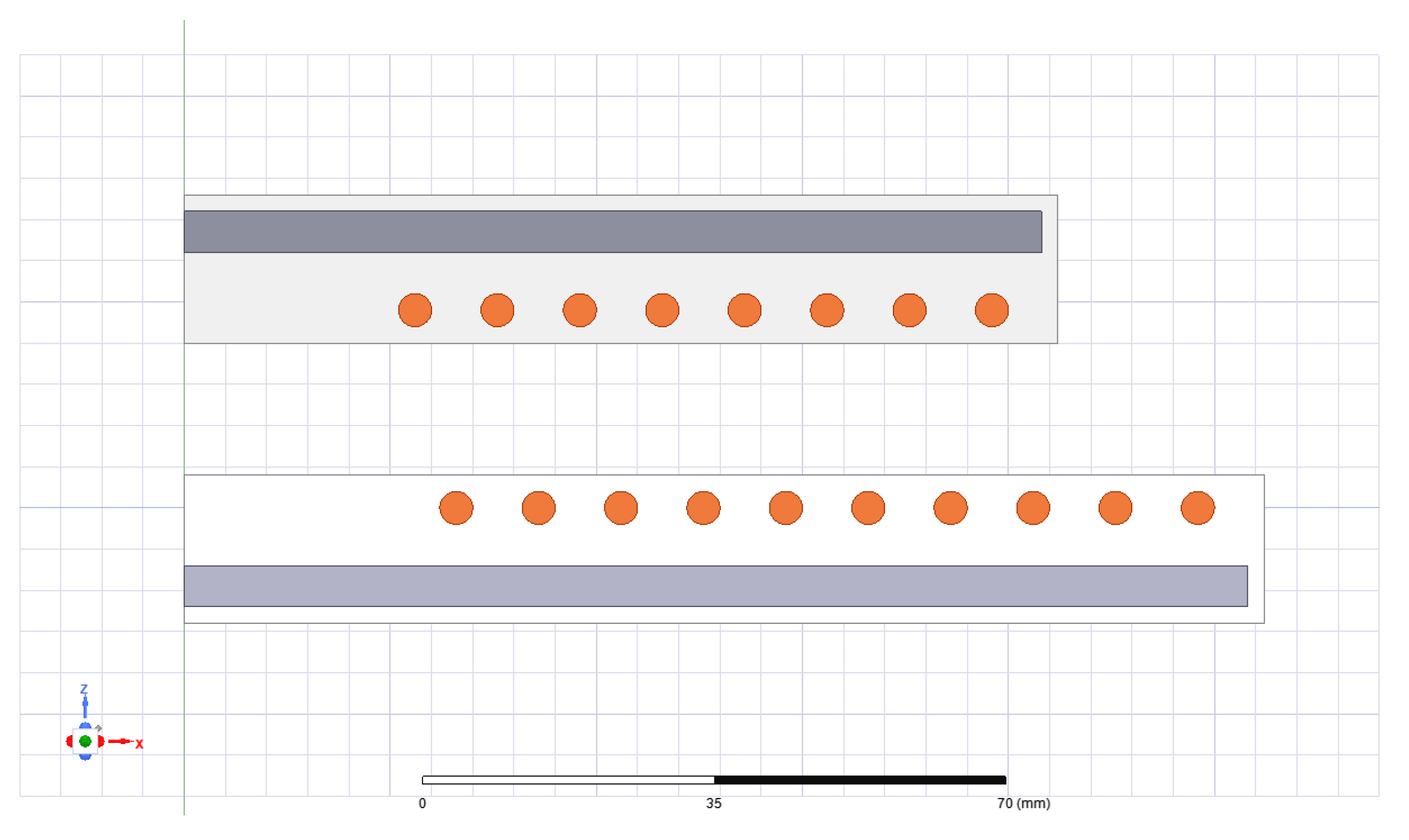
4.2. Numerical Analysis
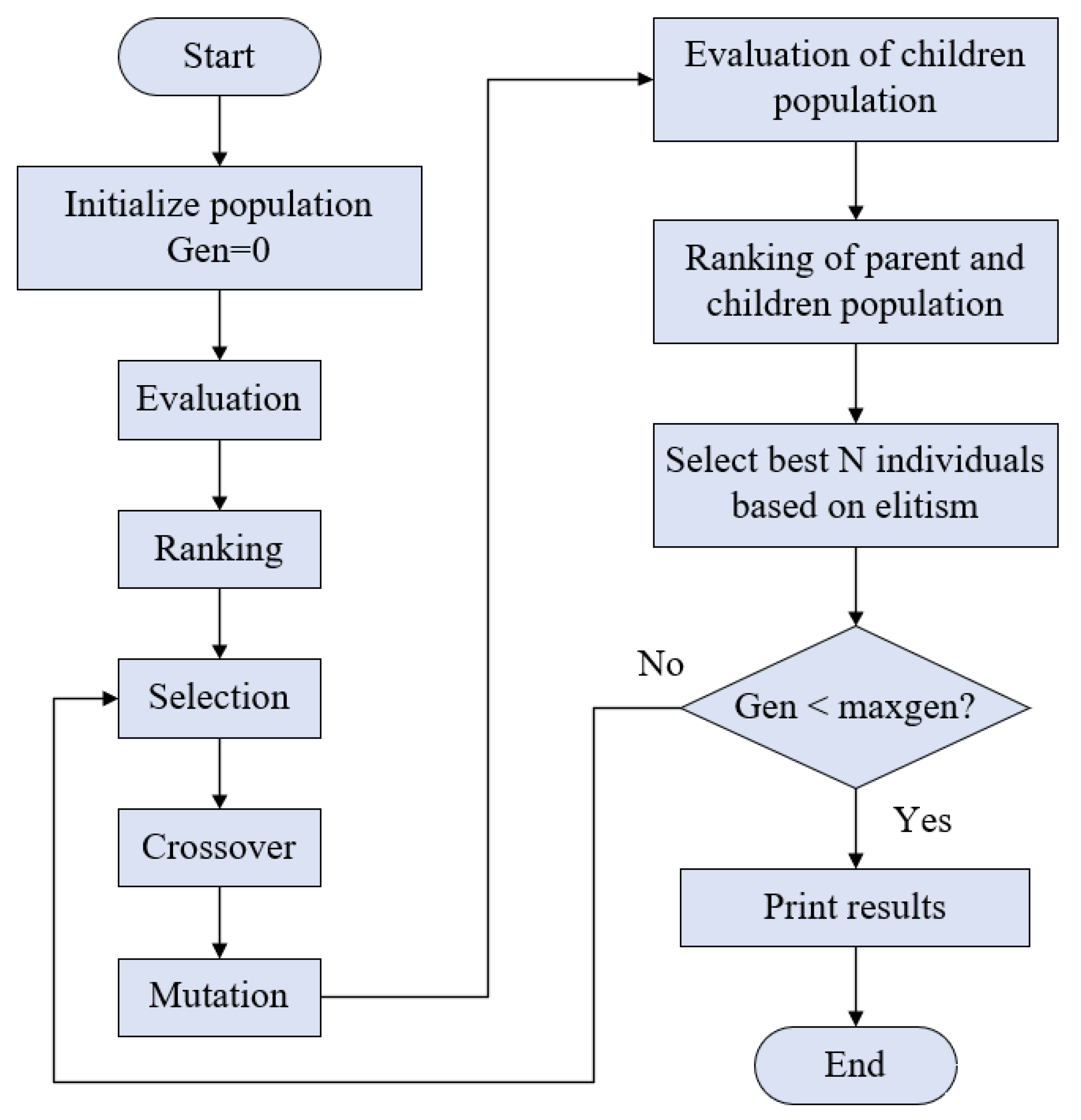
4.3. NSGA-II Optimization Method
4.4. TOPSIS Method
5. Optimization of WPT Coupler
5.1. Multi-Objective Problem
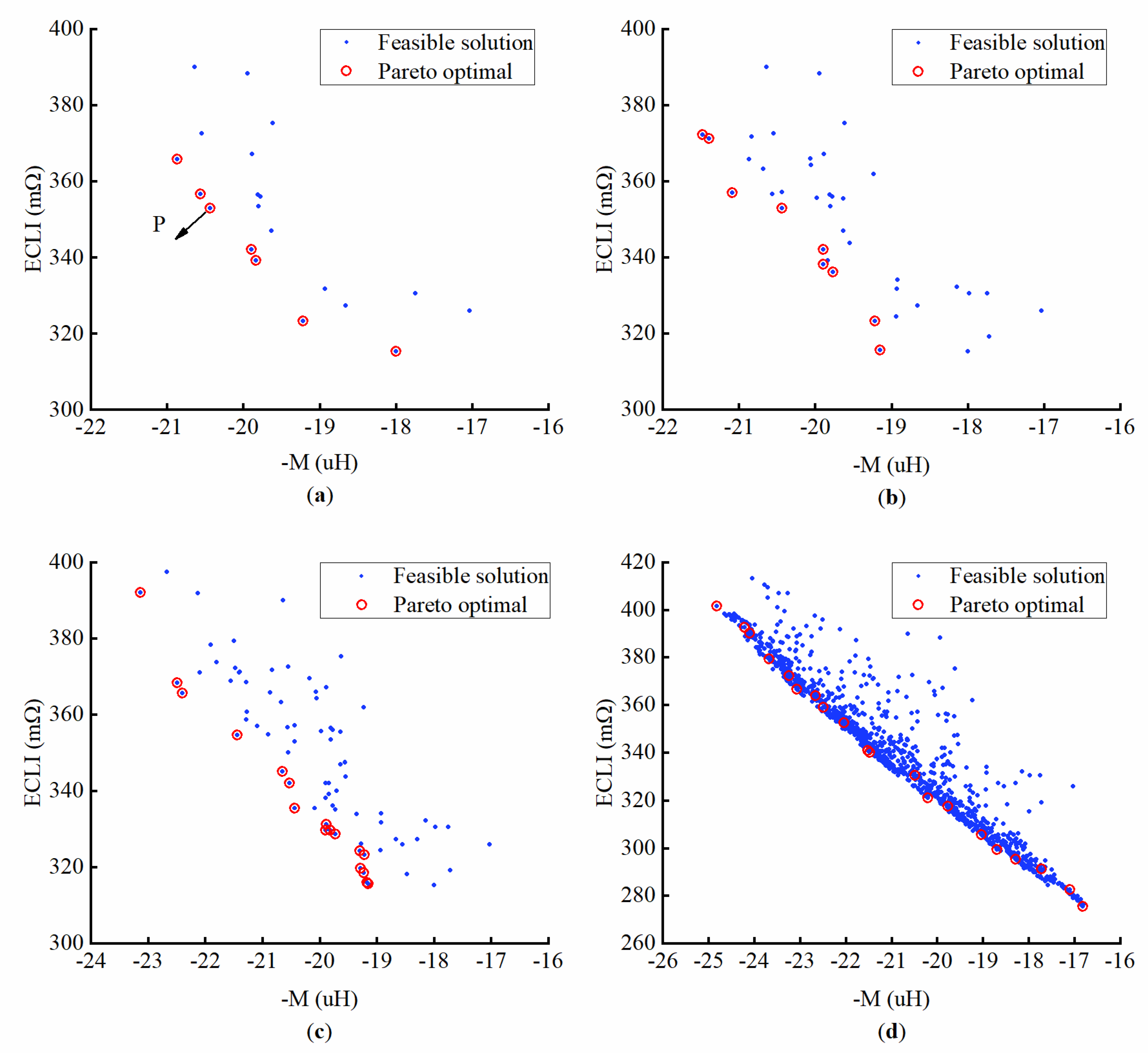
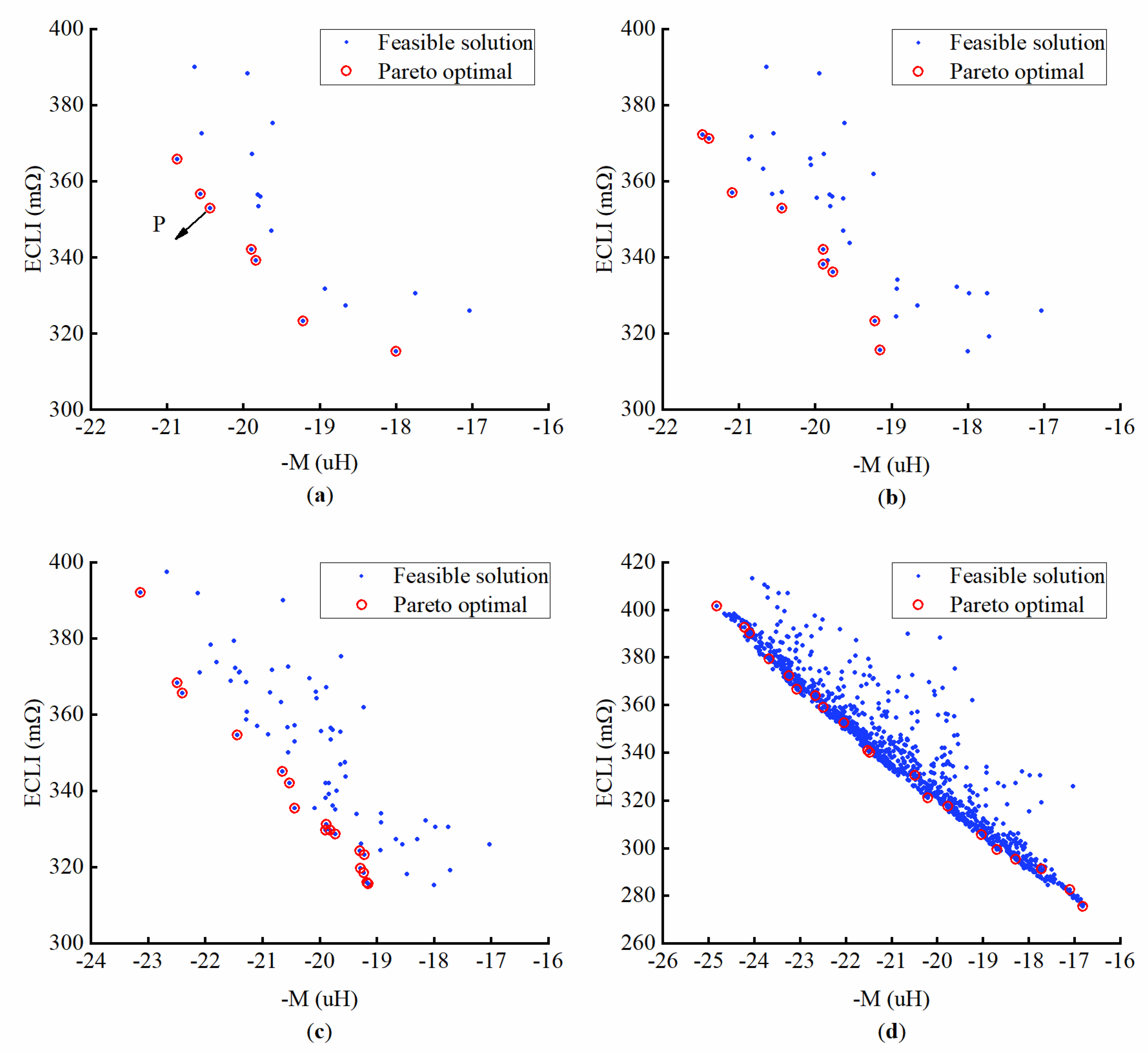
5.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feezor, M.D.; Sorrell, F.Y.; Blankinship, P.R. An interface system for autonomous undersea vehicles. IEEE J. Ocean. Eng. 2001, 26, 522–525. [Google Scholar] [CrossRef]
- McGinnis, T.; Henze, C.P.; Conroy, K. Inductive Power System for Autonomous Underwater Vehicles. OCEANS 2007, 2007, 1–5. [Google Scholar]
- Song, B.; Wang, Y.; Zhang, K.; Mao, Z. Research on wireless power transfer system for Torpedo autonomous underwater vehicles. Adv. Mech. Eng. 2018, 10, 1–8. [Google Scholar] [CrossRef]
- Anyapo, C.; Intani, P. Wireless Power Transfer for Autonomous Underwater Vehicle. In Proceedings of the 2020 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Seoul, Korea, 15–19 November 2020; pp. 246–249. [Google Scholar]
- Teeneti, C.R.; Truscott, T.T.; Beal, D.N.; Pantic, Z. Review of Wireless Charging Systems for Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2021, 46, 68–87. [Google Scholar] [CrossRef]
- Li, S.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Deng, J.; Li, W.; Nguyen, T.D.; Li, S.; Mi, C.C. Compact and Efficient Bipolar Coupler for Wireless Power Chargers: Design and Analysis. IEEE Trans. Power Electr. 2015, 30, 6130–6140. [Google Scholar] [CrossRef]
- Miller, J.M.; Daga, A. Elements of Wireless Power Transfer Essential to High Power Charging of Heavy Duty Vehicles. IEEE Trans. Transp. Electrif. 2015, 1, 26–39. [Google Scholar] [CrossRef]
- Zhang, K.; Ma, Y.; Yan, Z.; Di, Z.; Song, B.; Hu, A.P. Eddy Current Loss and Detuning Effect of Seawater on Wireless Power Transfer. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 909–917. [Google Scholar] [CrossRef]
- Cheng, Z.; Lei, Y.; Song, K.; Zhu, C. Design and Loss Analysis of Loosely Coupled Transformer for an Underwater High-Power Inductive Power Transfer System. IEEE Trans. Magn. 2015, 51, 1–10. [Google Scholar]
- Zhang, K.; Zhu, Z.; Song, B.; Xu, D. A power distribution model of magnetic resonance WPT system in seawater. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–4. [Google Scholar]
- Yan, Z.; Zhang, Y.; Kan, T.; Lu, F.; Zhang, K.; Song, B.; Mi, C.C. Frequency Optimization of a Loosely Coupled Underwater Wireless Power Transfer System Considering Eddy Current Loss. IEEE Trans. Ind. Electron. 2019, 66, 3468–3476. [Google Scholar] [CrossRef]
- Yan, Z.; Song, B.; Zhang, Y.; Zhang, K.; Mao, Z.; Hu, Y. A Rotation-Free Wireless Power Transfer System With Stable Output Power and Efficiency for Autonomous Underwater Vehicles. IEEE Trans. Power Electr. 2019, 34, 4005–4008. [Google Scholar] [CrossRef]
- Zhang, W.; White, J.C.; Abraham, A.M.; Mi, C.C. Loosely Coupled Transformer Structure and Interoperability Study for EV Wireless Charging Systems. IEEE Trans. Power Electr. 2015, 30, 6356–6367. [Google Scholar] [CrossRef]
- Prengel, S.; Helwig, M.; Modler, N. Lightweight coil for efficient wireless power transfer: Optimization of weight and efficiency for WPT coils. In Proceedings of the 2014 IEEE Wireless Power Transfer Conference, Jeju, Korea, 8–9 May 2014; pp. 96–99. [Google Scholar]
- Wei, G.; Jin, X.; Wang, C.; Feng, J.; Zhu, C.; Matveevich, M.I. An Automatic Coil Design Method With Modified AC Resistance Evaluation for Achieving Maximum Coil–Coil Efficiency in WPT Systems. IEEE Trans. Power Electr. 2020, 35, 6114–6126. [Google Scholar] [CrossRef]
- Shijo, T.; Ogawa, K.; Obayashi, S. Optimization of thickness and shape of core block in resonator for 7 kW-class wireless power transfer system for PHEV/EV charging. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3099–3102. [Google Scholar]
- Budhia, M.; Covic, G.A.; Boys, J.T. Design and Optimization of Circular Magnetic Structures for Lumped Inductive Power Transfer Systems. IEEE Trans. Power Electr. 2011, 26, 3096–3108. [Google Scholar] [CrossRef]
- Rituraj, G.; Kumar, P. A New Magnetic Structure of Unipolar Rectangular Coils in WPT Systems to Minimize the Ferrite Volume While Maintaining Maximum Coupling. IEEE Trans. Circuits Syst. II-Express Briefs 2021, 68, 2072–2076. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Ramezani, A.; Farhangi, S.; Iman-Eini, H.; Farhangi, B.; Rahimi, R.; Moradi, G.R. Optimized LCC-Series Compensated Resonant Network for Stationary Wireless EV Chargers. IEEE Trans. Ind. Electron. 2019, 66, 2756–2765. [Google Scholar] [CrossRef]
- Opricovic, S.; Tzeng, G. Compromise solution by MCDM methods: A comparative analysis of VIKOR and TOPSIS. Eur. J. Oper. Res. 2004, 156, 445–455. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| M/uH | ECLI/mΩ | |
|---|---|---|
| 1 | 24.10749 | 390.15168 |
| 2 | 22.49816 | 359.09016 |
| 3 | 23.2414 | 372.4909 |
| 4 | 20.48618 | 330.66909 |
| 5 | 20.21399 | 321.03443 |
| 6 | 22.04907 | 352.67751 |
| 7 | 23.67923 | 379.34 |
| 8 | 19.04261 | 305.60054 |
| 9 | 17.10243 | 282.64609 |
| 10 | 16.82043 | 275.73258 |
| 11 | 18.28402 | 295.34013 |
| 12 | 21.47508 | 340.11445 |
| 13 | 21.52286 | 340.87653 |
| 14 | 17.7255 | 291.37137 |
| 15 | 24.82117 | 401.69557 |
| 16 | 24.21178 | 392.58677 |
| 17 | 19.76503 | 317.67936 |
| 18 | 22.67059 | 364.00505 |
| 19 | 18.69793 | 299.45943 |
| 20 | 23.07243 | 366.70417 |
| W1 | W2 | M/uH | ECLI/mΩ | |
|---|---|---|---|---|
| A | 1 | 0 | 24.82117 | 401.69557 |
| B | 0.75 | 0.25 | 24.82117 | 401.69557 |
| C | 0.5 | 0.5 | 16.82043 | 275.73258 |
| D | 0.25 | 0.75 | 16.82043 | 275.73258 |
| E | 0 | 1 | 16.82043 | 275.73258 |
| Initial point P | 20.43746 | 353.01086 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, B.; Mao, Z.; Zhang, K.; Liu, P. Analysis and Optimal Design of a WPT Coupler for Underwater Vehicles Using Non-Dominated Sorting Genetic Algorithm. Appl. Sci. 2022, 12, 2015. https://doi.org/10.3390/app12042015
Liang B, Mao Z, Zhang K, Liu P. Analysis and Optimal Design of a WPT Coupler for Underwater Vehicles Using Non-Dominated Sorting Genetic Algorithm. Applied Sciences. 2022; 12(4):2015. https://doi.org/10.3390/app12042015
Chicago/Turabian StyleLiang, Bo, Zhaoyong Mao, Kehan Zhang, and Peizhou Liu. 2022. "Analysis and Optimal Design of a WPT Coupler for Underwater Vehicles Using Non-Dominated Sorting Genetic Algorithm" Applied Sciences 12, no. 4: 2015. https://doi.org/10.3390/app12042015
APA StyleLiang, B., Mao, Z., Zhang, K., & Liu, P. (2022). Analysis and Optimal Design of a WPT Coupler for Underwater Vehicles Using Non-Dominated Sorting Genetic Algorithm. Applied Sciences, 12(4), 2015. https://doi.org/10.3390/app12042015