
Adaptive Metaheuristic-Based Methods for Autonomous Robot Path Planning: Sustainable Agricultural Applications

 , ,
, , 


Abstract
:1. Introduction
2. Literature Review
2.1. Unmanned Aerial Robots’ Applications in Agriculture
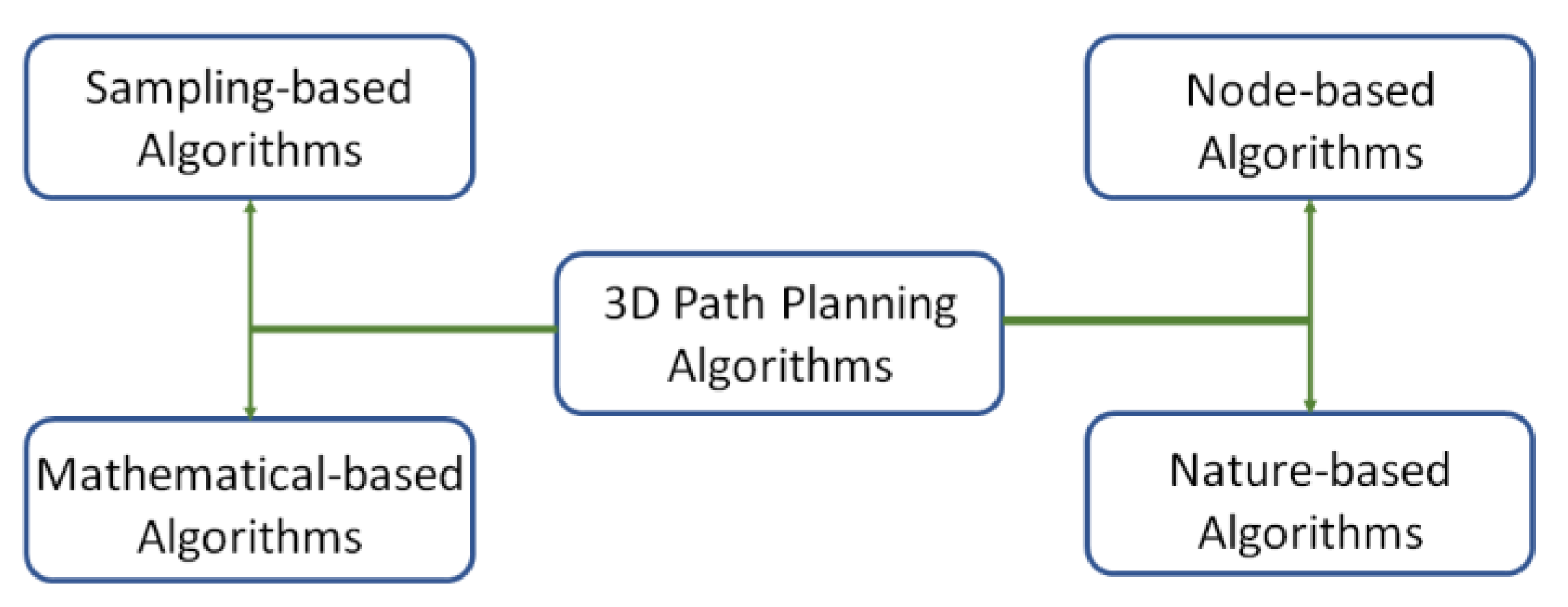
2.2. Path Planning in Agricultural Applications
3. Materials and Methods
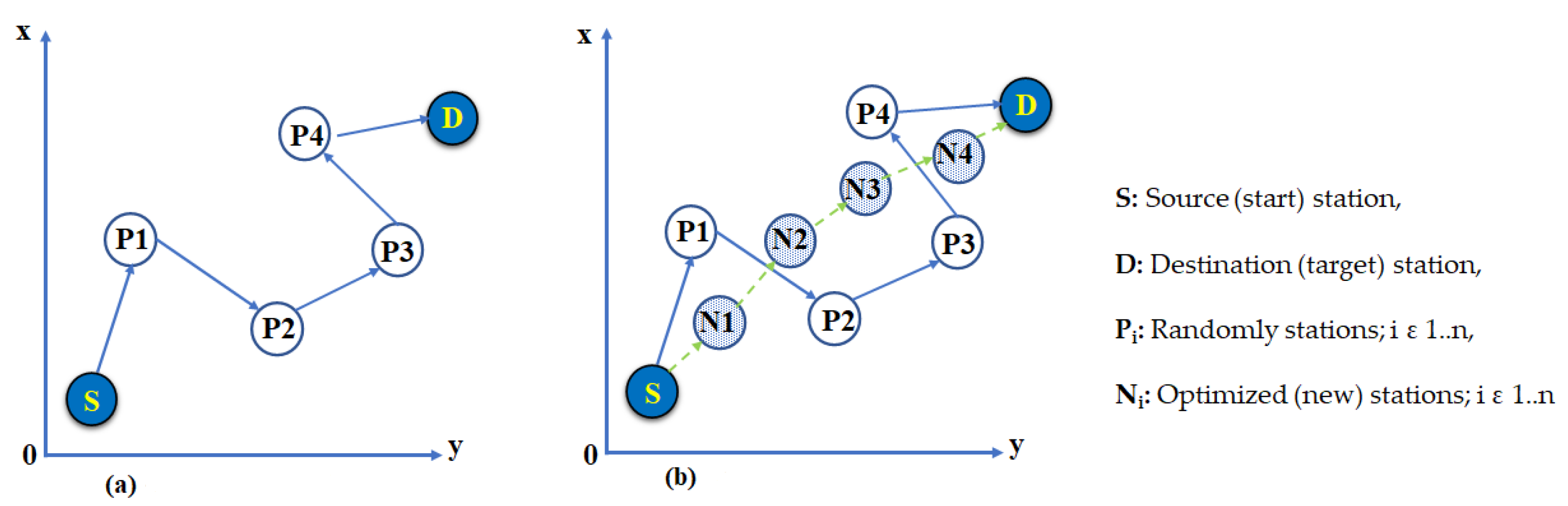
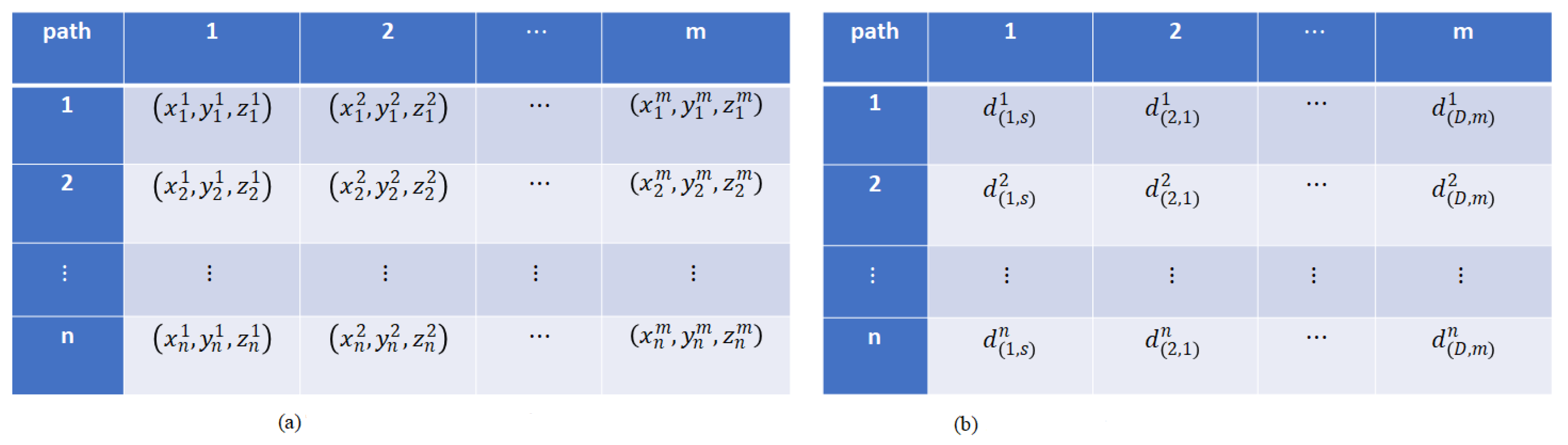
3.1. Definitions
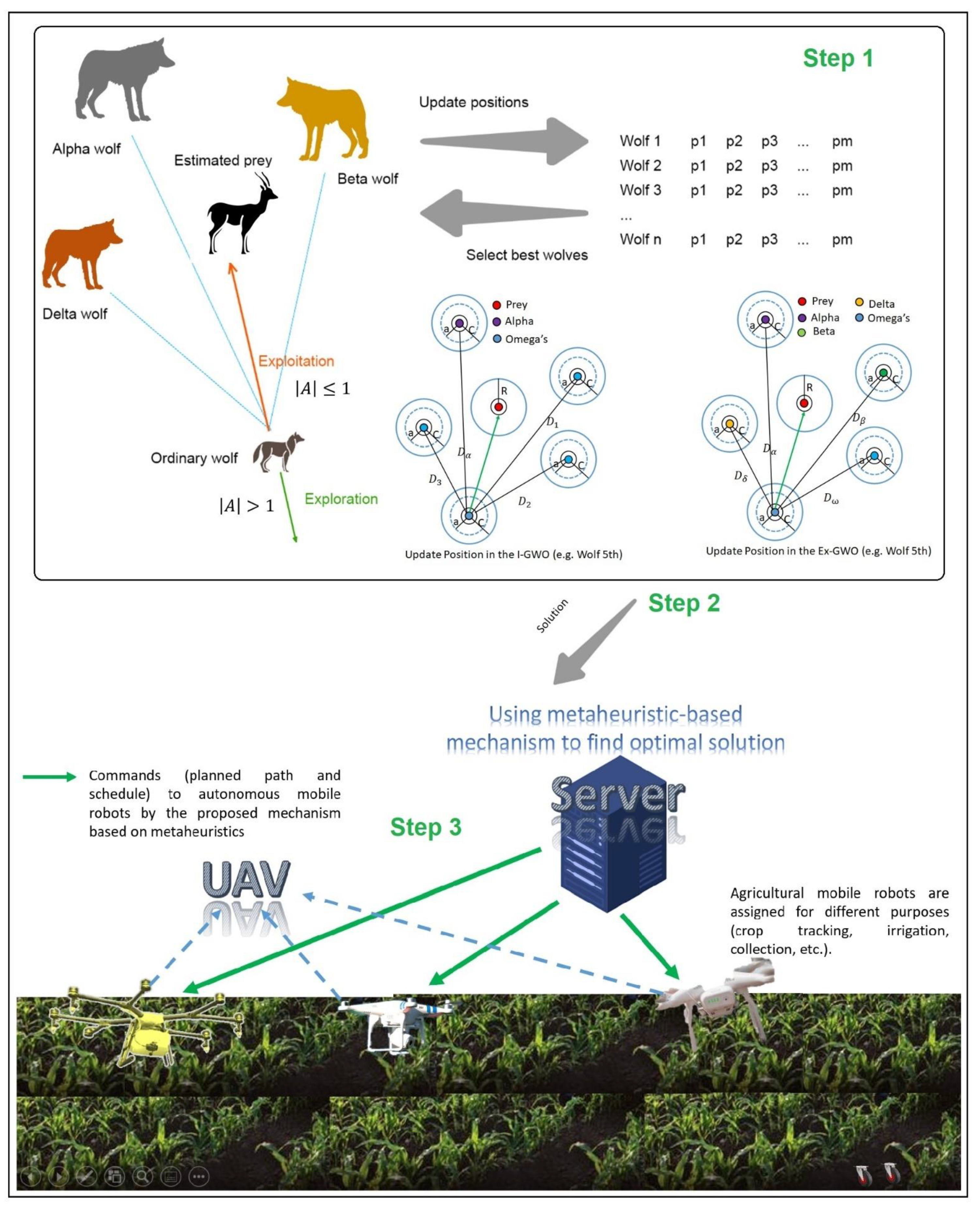
3.2. GWO-Based Path Planning
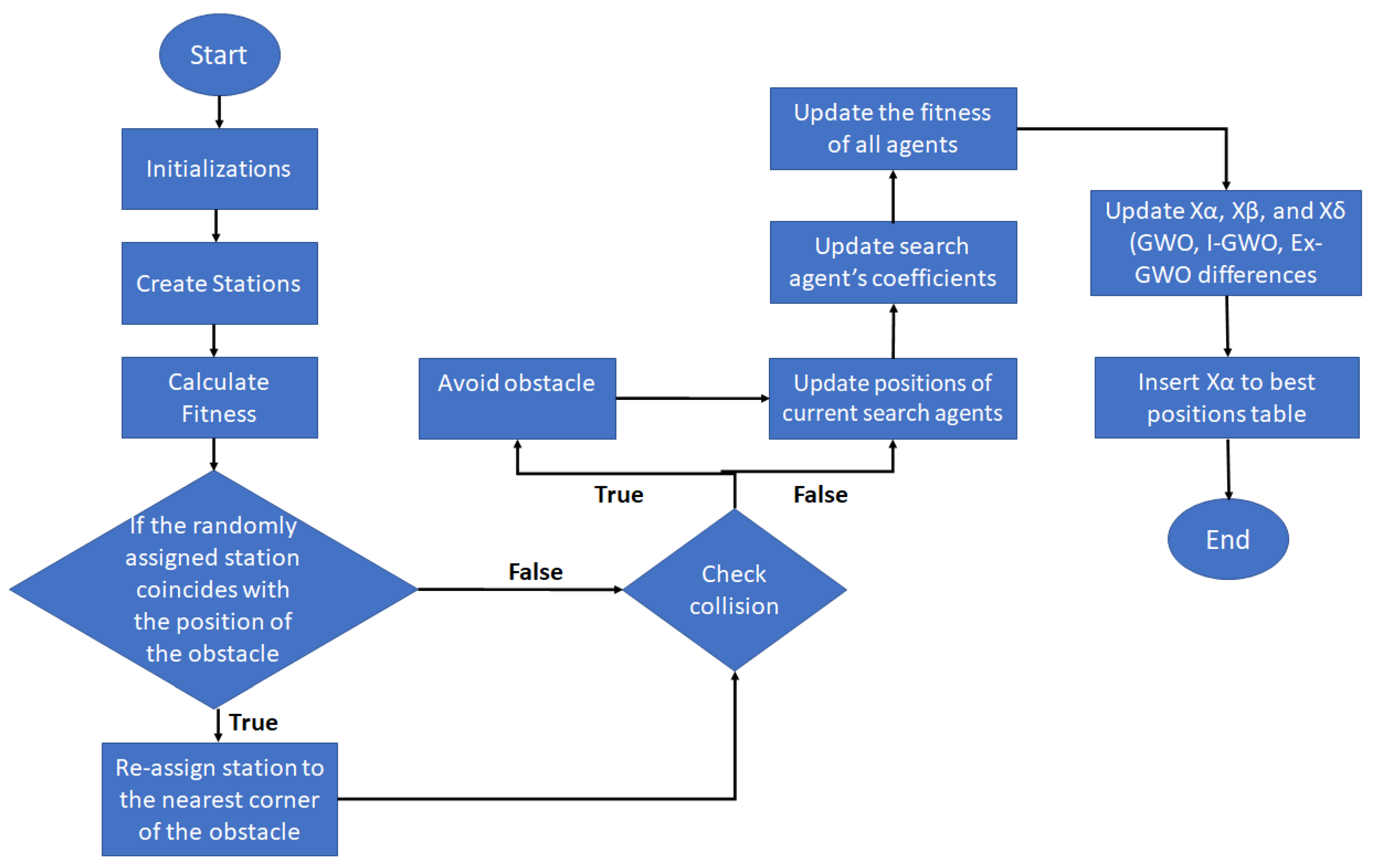
3.3. Working Mechanism of the Method
| Algorithm 1. Pseudocode of station selection |
|
| Algorithm 2. Pseudocode of proposed path planning |
|
3.4. Other Possible Features: Applicability in Farmlands
4. Results and Discussion
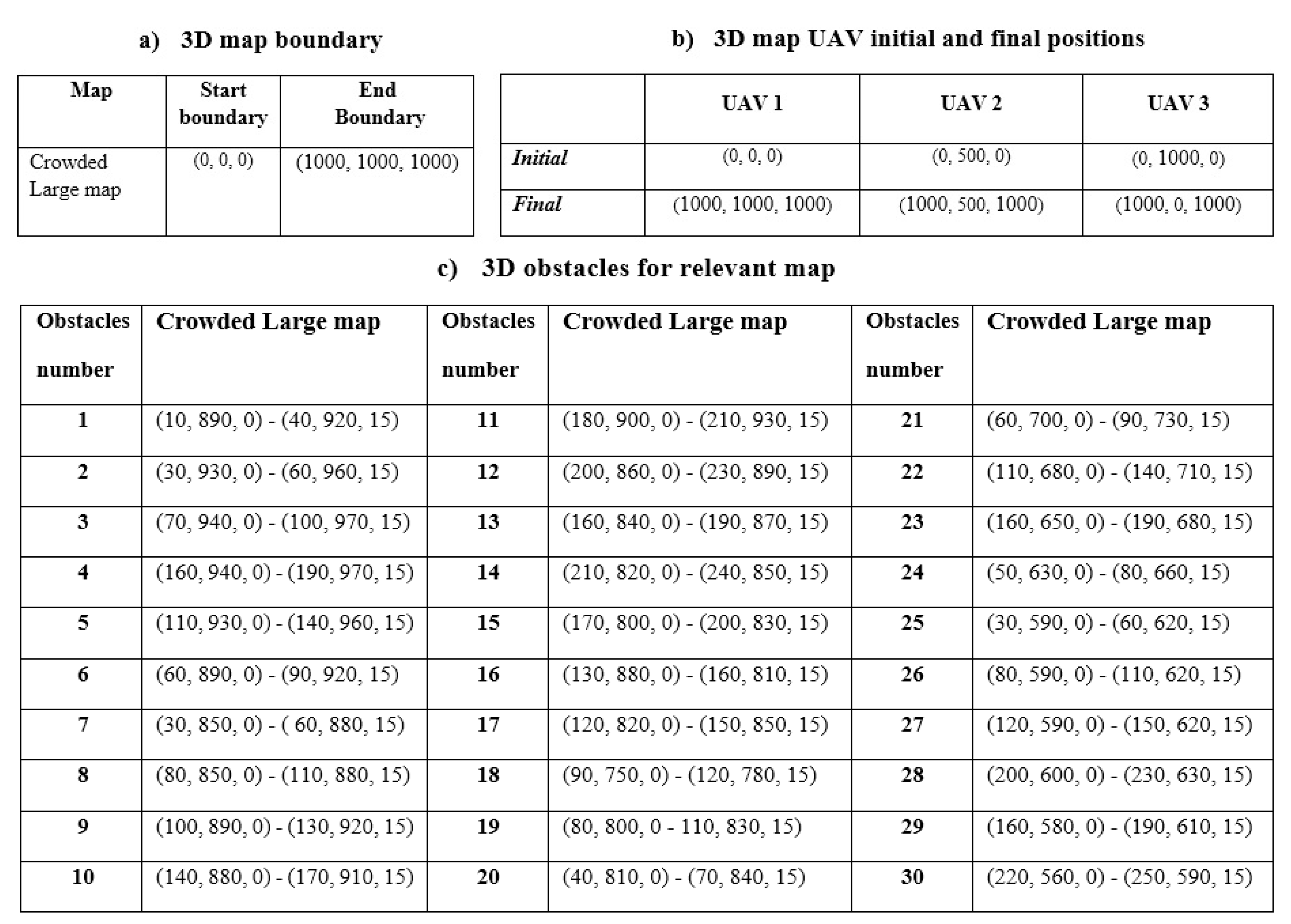
4.1. Simulation Setting
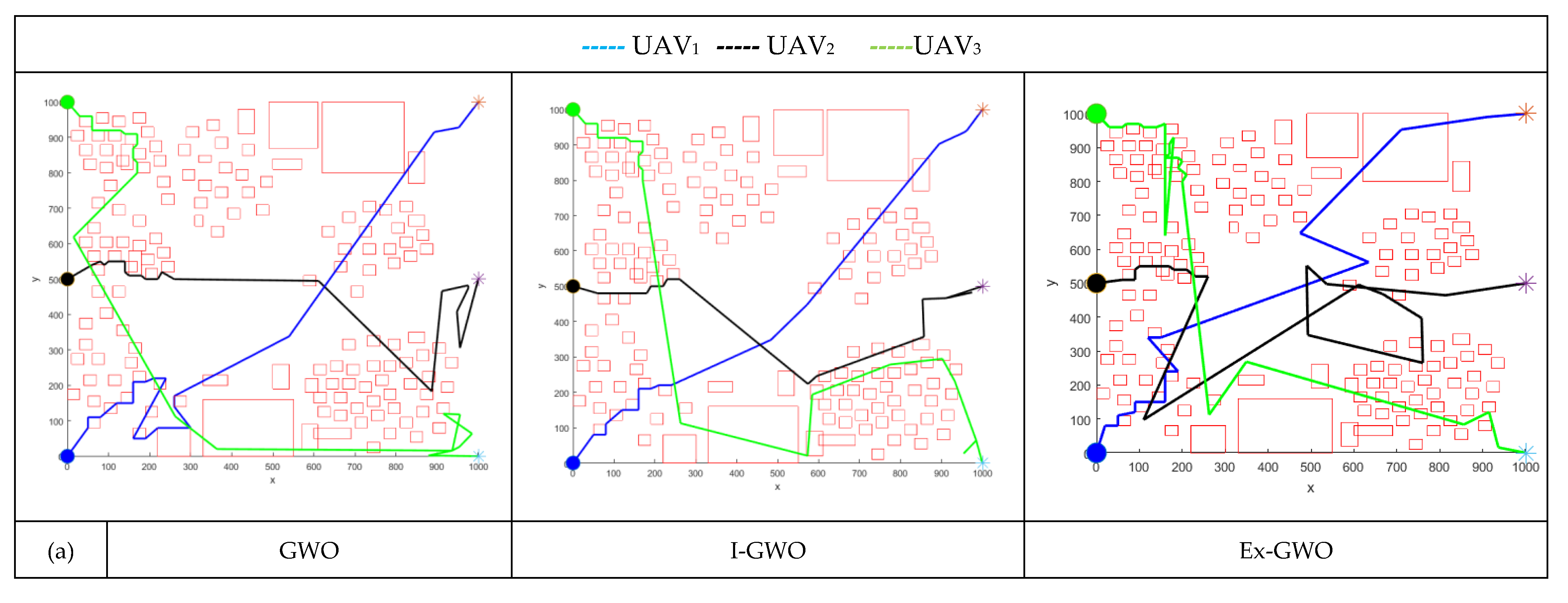
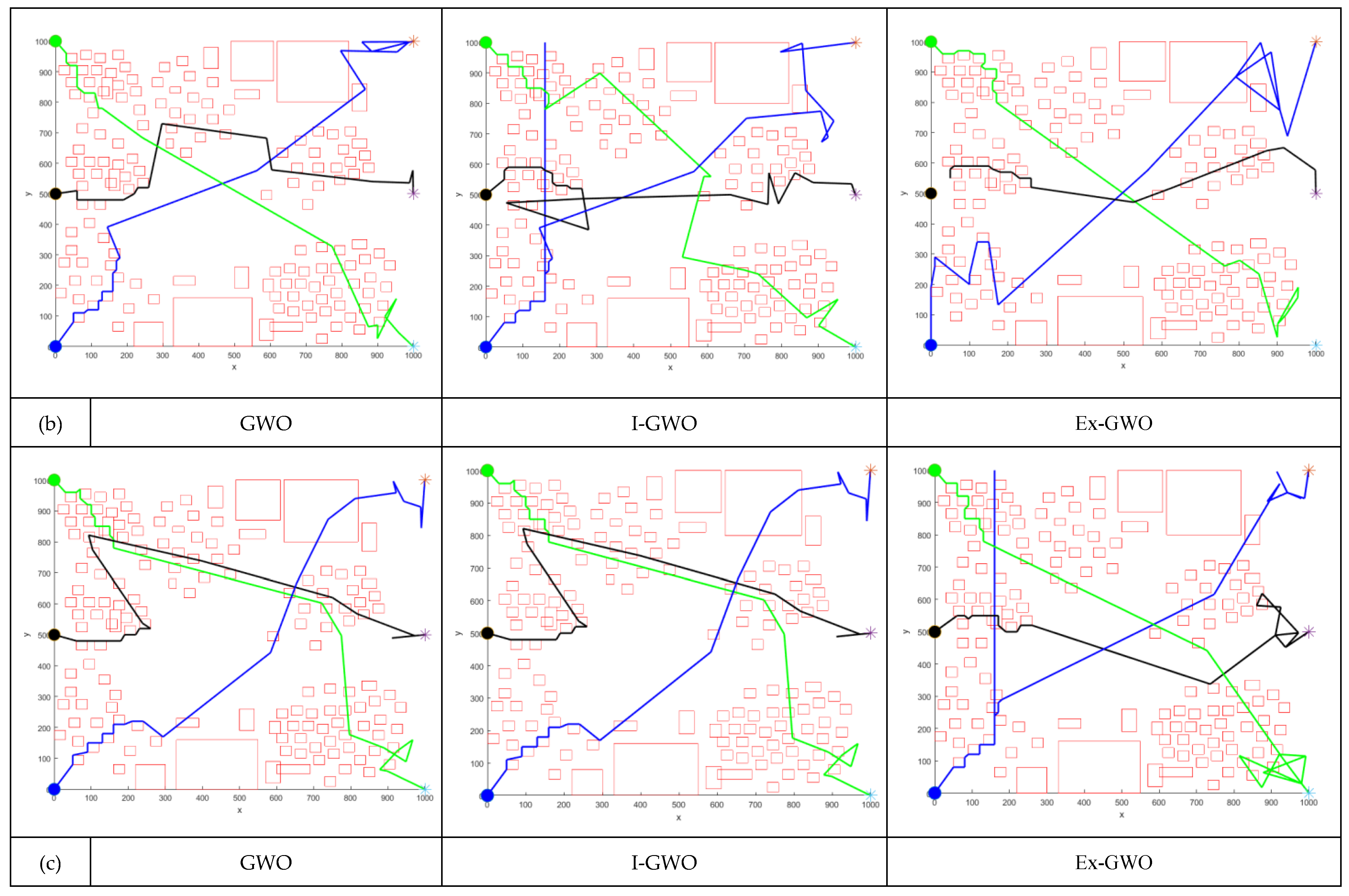
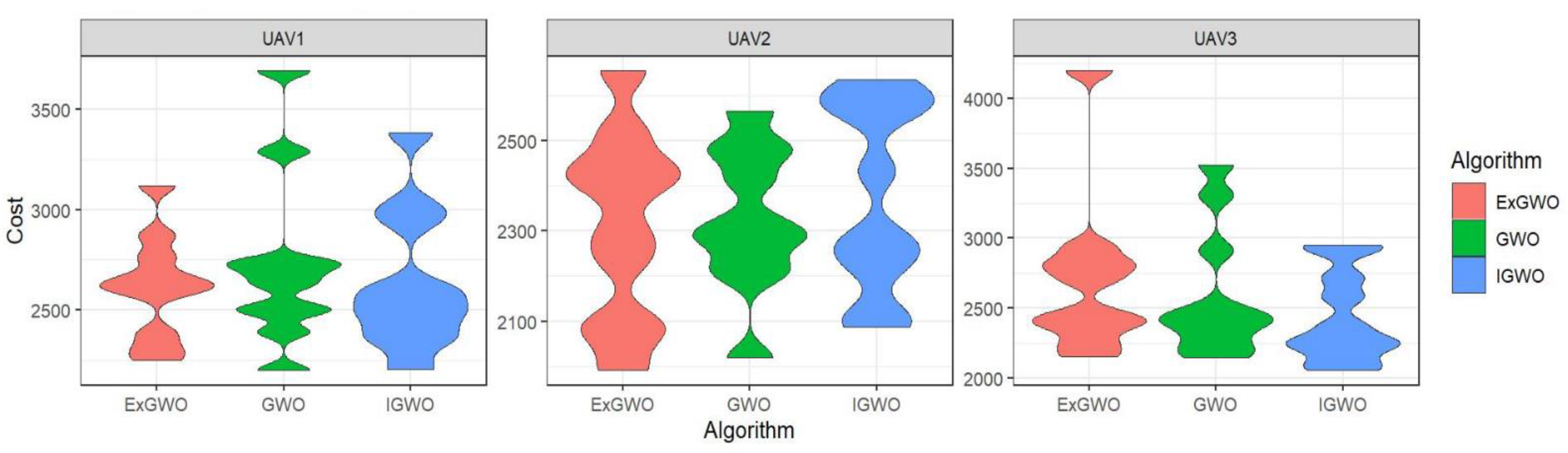
4.2. Analysis and Evaluation (Cost of Paths)
4.3. Analysis and Evaluation (Taken Times and Complexity)
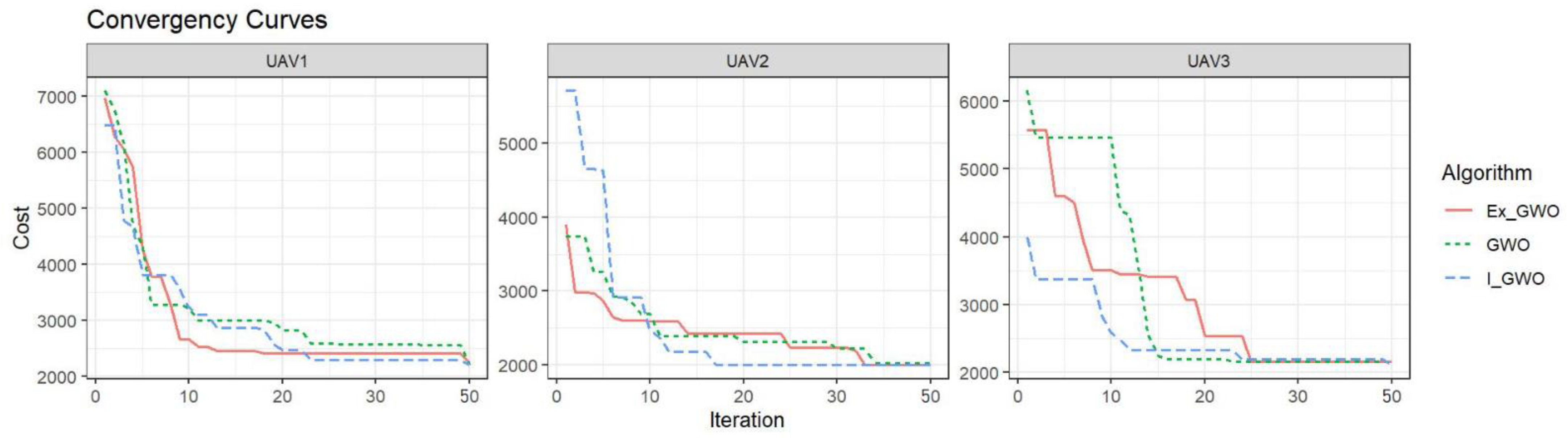
4.4. Analysis and Evaluation (Convergence Curve)
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- United Nations Environment Programme. Sustainability. Available online: https://www.unep.org/about-un-environment/sustainability (accessed on 29 September 2021).
- Sylvester, G. E-Agriculture in Action: Drones for Agriculture; Food and Agriculture Organization of the United Nations and International Telecommunication Union: Bangkok, Thailand, 2018; pp. 11–22. [Google Scholar]
- Dehghan Khangahi, F. Ecological Problems and Social Mobilization: The Case of Urmia Lake. Ph.D. Thesis, Istanbul University, Istanbul, Turkey, 2020. [Google Scholar]
- Dehghan Khangahi, F.; Kiani, F. Social Mobilization and Migration Predictions by Machine Learning Methods: A study case on Lake Urmia. Int. J. Innov. Technol. Explor. Eng. 2021, 10, 123–127. [Google Scholar] [CrossRef]
- Yang, L.; Qi, J.; Song, D.; Xiao, J.; Han, J.; Xia, Y. Survey of Robot 3D Path Planning Algorithms. J. Control Sci. Eng. 2016, 2016, 7426913. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceeding of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 2376–2381. [Google Scholar] [CrossRef]
- Agrawal, H.; Dhall, R.; Iyer, K.S.S.; Chetlapalli, V. An improved energy efficient system for IoT enabled precision agriculture. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 2337–2348. [Google Scholar] [CrossRef]
- Kiani, F.; Nematzadehmiandoab, S.; Seyyedabbasi, A. Designing a dynamic protocol for real-time Industrial Internet of Things-based applications by efficient management of system resources. Adv. Mech. Eng. 2019, 11, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Kiani, F.; Seyyedabbasi, A.; Nematzadeh, S. Improving the performance of hierarchical wireless sensor networks using the metaheuristic algorithms: Efficient cluster head selection. Sens. Rev. 2021, 41, 368–381. [Google Scholar] [CrossRef]
- Tzounis, A.; Katsoulas, N.; Bartzanas, T.; Kittas, C. Internet of Things in agriculture, recent advances and future challenges. Biosyst. Eng. 2017, 164, 31–48. [Google Scholar] [CrossRef]
- Nayyar, A.; Nguyen, B.-L.; Nguyen, N.G. The Internet of Drone Things (IoDT): Future Envision of Smart Drones. In First International Conference on Sustainable Technologies for Computational Intelligence; Advances in Intelligent Systems and Computing; Springer: Singapore, 2020; Volume 1045, pp. 563–580. [Google Scholar]
- Anastasios, L.; Thomas, L.; Panagiotis, S.; Michalis, Z.; George, L. Towards smart farming: Systems, frameworks and exploitation of multiple sources. Comput. Netw. 2020, 172, 107147. [Google Scholar]
- Verónica, S.; Francisco, R. From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management. Agronomy 2020, 10, 207. [Google Scholar]
- Kiani, F.; Seyyedabbasi, A. Wireless Sensor Network and Internet of Things in Precision Agriculture. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 99–103. [Google Scholar] [CrossRef]
- Benos, L.; Bechar, A.; Bochtis, D. Safety and ergonomics in human-robot interactive agricultural operations. Biosyst. Eng. 2020, 200, 55–72. [Google Scholar] [CrossRef]
- Panagiotis, R.; Panagiotis, S.; Thomas, L.; Ioannis, M. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar]
- Kadeghe, G.; Wesley, M.; Edward, M.; Glen, C. An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting. AgriEngineering 2020, 2, 150–174. [Google Scholar]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- Seyyedabbasi, A.; Kiani, F. I-GWO and Ex-GWO: Improved algorithms of the Grey Wolf Optimizer to solve global optimization problems. Eng. Comput. 2021, 37, 509–532. [Google Scholar] [CrossRef]
- Seyyedabbasi, A.; Kiani, F. MAP-ACO: An efficient protocol for multi-agent pathfinding in real-time WSN and decentralized IoT systems. Microprocess. Microsyst. 2020, 79, 103325. [Google Scholar] [CrossRef]
- Chung, H.M.; Maharjan, S.; Zhang, Y.; Eliassen, F.; Strunz, K. Placement and Routing Optimization for Automated Inspection with Unmanned Aerial Robots: A Study in Offshore Wind Farm. IEEE Trans. Ind. Inform. 2020, 17, 3032–3043. [Google Scholar] [CrossRef]
- del Cerro, J.; Cruz Ulloa, C.; Barrientos, A.; de León Rivas, J. Unmanned Aerial Robots in Agriculture: A Survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- Macrina, G.; Di Puglia Pugliese, L.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Baik, H.; Valenzuela, J. An optimization drone routing model for inspecting wind farms. Soft Comput. 2021, 25, 2483–2498. [Google Scholar] [CrossRef]
- Allred, B.; Eash, N.; Freeland, R.; Martinez, L.; Wishart, D. Effective and efficient agricultural drainage pipe mapping with UAS thermal infrared imagery: A case study. Agric. Water Manag. 2018, 197, 132–137. [Google Scholar] [CrossRef]
- Vasudevan, A.; Kumar, D.A.; Bhuvaneswari, N.S. Precision farming using unmanned aerial and ground robots. In Proceedings of the IEEE Technological Innovations in ICT for Agriculture and Rural Development (TIAR), Chennai, India, 15–16 July 2016; pp. 146–150. [Google Scholar]
- Behjati, M.; Noh, A.M.; Alobaidy, H.; Zulkifley, M.; Nordin, R.; Abdullah, N. LoRa Communications as an Enabler for Internet of Drones towards Large-Scale Livestock Monitoring in Rural Farms. Sensors 2021, 21, 5044. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, S.; Shahvari, O.; Marufuzzaman, M.; Li, X.; Bian, L. Drone routing and optimization for post-disaster inspection. Comput. Ind. Eng. 2021, 159, 107495. [Google Scholar] [CrossRef]
- Dukkanci, O.; Kara, B.Y.; Bektaş, T. Minimizing energy and cost in range-limited drone deliveries with speed optimization. Transp. Res. Part C Emerg. Technol. 2021, 125, 102985. [Google Scholar] [CrossRef]
- Felegari, S.; Sharifi, A.; Moravej, K.; Amin, M.; Golchin, A.; Muzirafuti, A.; Tariq, A.; Zhao, N. Integration of Sentinel 1 and Sentinel 2 Satellite Images for Crop Mapping. Appl. Sci. 2021, 11, 10104. [Google Scholar] [CrossRef]
- Matrice, D. Matrice 100. 100, 2016, 2017. Available online: https://www.dji.com/product/matrice100 (accessed on 14 November 2021).
- Papachristos, C.; Kamel, M.; Popović, M.; Khattak, S.; Bircher, A.; Oleynikova, H.; Dang, T.; Mascarich, F.; Alexis, K.; Siegwart, R. Autonomous Exploration and Inspection Path Planning for Aerial Robots Using the Robot Operating System. In Studies in Computational Intelligence; Koubaa, A., Ed.; Springer Science and Business Media LLC: Toledo, Spain, 2018; pp. 67–111. [Google Scholar]
- Christiansen, M.P.; Laursen, M.S.; Jørgensen, R.N.; Skovsen, S.; Gislum, R. Designing and Testing a UAV Mapping System for Agricultural Field Surveying. Sensors 2017, 17, 2703. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Faical, B.S.; Pessin, G.; Filho, G.P.; Carvalho, A.C.; Furquim, G.; Ueyama, J. Fine-Tuning of UAV Control Rules for Spraying Pesticides on Crop Fields. In Proceedings of the 2014 IEEE 26th International Conference on Tools with Artificial Intelligence, Limassol, Cyprus, 10–12 November 2014; pp. 527–533. [Google Scholar]
- Dai, B.; He, Y.; Gu, F.; Yang, L.; Han, J.; Xu, W. A vision-based autonomous aerial spray system for precision agriculture. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macao, China, 5–8 December 2017; pp. 507–513. [Google Scholar]
- Klauser, F.; Pauschinger, D. Entrepreneurs of the air: Sprayer drones as mediators of volumetric agriculture. J. Rural. Stud. 2021, 84, 55–62. [Google Scholar] [CrossRef]
- Skobelev, P.; Budaev, D.; Gusev, N.; Voschuk, G. Designing Multi-agent Swarm of UAV for Precise Agriculture. In International Conference on Practical Applications of Agents and Multi-Agent Systems; Javier, B.J., Ed.; Springer: Toledo, Spain, 2018; pp. 47–59. [Google Scholar]
- Ju, C.; Son, H.I. Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation. Electronics 2018, 7, 162. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhao, Y.; Zhang, J.; Dong, Y. A Hybrid PSO Algorithm Based Flight Path Optimization for Multiple Agricultural UAVs. In Proceedings of the 2016 IEEE 28th International Conference on Tools with Artificial Intelligence (ICTAI), San Jose, CA, USA, 6–8 November 2016; pp. 691–697. [Google Scholar]
- Noreen, I.; Khan, A.; Habib, Z. Optimal Path Planning using RRT*-Adjustable Bounds. Intell. Serv. Robot 2018, 11, 41–52. [Google Scholar] [CrossRef]
- Guruji, A.K.; Agarwal, H.; Parsediya, D. Time-efficient A* Algorithm for Robot Path Planning. Procedia Technol. 2016, 23, 144–149. [Google Scholar] [CrossRef] [Green Version]
- Jason, G.; Xin, M.; Liu, F.; Ying, W.; Ren, H. Mathematical Modeling and Intelligent Algorithm for Multi-Robot Path Planning. Math. Probl. Eng. 2017, 2017, 1465158. [Google Scholar]
- Li, J.; Yang, S.X.; Xu, Z. A Survey on Robot Path Planning using Bio-inspired Algorithms. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2111–2116. [Google Scholar]
- Choudhury, N.; Mandal, R.; Kar, S.K. Bioinspired robot path planning using PointBug algorithm. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 2638–2643. [Google Scholar]
- Wu, L.; Li, Y.; Liu, J. Based on Improved Bio-Inspired Model for Path Planning by Multi-AUV. In Proceedings of the Proceedings of the 2018 International Conference on Electronics and Electrical Engineering Technology, Tianjin, China, 19–21 September 2018; pp. 128–134. [Google Scholar]
- Seyyedabbasi, A.; Aliyev, R.; Kiani, F.; Gulle, M.U.; Basyildiz, H.; Shah, M.A. Hybrid algorithms based on combining reinforcement learning and metaheuristic methods to solve global optimization problems. Knowl.-Based Syst. 2021, 223, 107044. [Google Scholar] [CrossRef]
- Kiani, F.; Seyyedabbasi, A.; Aliyev, R.; Gulle, M.U.; Basyildiz, H.; Shah, M.A. Adapted-RRT: Novel hybrid method to solve three-dimensional path planning problem using sampling and metaheuristic-based algorithms. Neural Comput. Appl. 2021, 33, 15569–15599. [Google Scholar] [CrossRef]
- Flemming, S.; la Anders, C.H.; Morten, B. Configuration Space and Visibility Graph Generation from Geometric Workspaces for UAVs. In Proceedings of the AAIA, Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; pp. 1–12. [Google Scholar]
- Bera, T.; Bhat, M.S.; Ghose, D. Analysis of Obstacle based Probabilistic RoadMap Method using Geometric Probability. IFAC Proc. Vol. 2014, 47, 462–469. [Google Scholar] [CrossRef] [Green Version]
- Kavraki, L.; Svestka, P.; Latombe, J.-C.; Overmars, M. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- Kiani, F.; Seyyedabbasi, A.; Aliyev, R.; Shah, M.A.; Gulle, M. 3D Path Planning Method for Multi-UAVs Inspired by Grey Wolf Algorithms. J. Internet Technol. 2021, 22, 1–12. [Google Scholar]
- Pandey, P.; Shukla, A.; Tiwari, R. Three-dimensional path planning for unmanned aerial robots using glowworm swarm optimization algorithm. Int. J. Syst. Assur. Eng. Manag. 2018, 9, 836–852. [Google Scholar] [CrossRef]
- Qu, G.; Gai, W.; Zhong, M.; Zhang, J. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial robots (UAVs) path planning. Appl. Soft Comput. J. 2020, 89, 1–12. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. A comparison of deterministic and probabilistic optimization algorithms for nonsmooth simulation-based optimization. Build. Environ. 2004, 39, 989–999. [Google Scholar] [CrossRef] [Green Version]
- Wolpert, H.; William, G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Cantelli, L.; Bonaccorso, F.; Longo, D.; Melita, C.D.; Schillaci, G.; Muscato, G. A Small Versatile Electrical Robot for Autonomous Spraying in Agriculture. AgriEngineering 2019, 1, 29. [Google Scholar] [CrossRef] [Green Version]
- Chetty, S.; Adewumi, A.O. Three New Stochastic Local Search Metaheuristics for the Annual Crop Planning Problem Based on a New Irrigation Scheme. J. Appl. Math. 2013, 2013, 158538. [Google Scholar] [CrossRef]
- Memmah, M.-M.; Lescourret, F.; Yao, X.; Lavigne, C. Metaheuristics for agricultural land use optimization. A review. Agron. Sustain. Dev. 2015, 35, 975–998. [Google Scholar] [CrossRef] [Green Version]
- Palomino-Suarez, D.; Pérez-Ruiz, A. Towards Automatic UAV Path Planning in Agriculture Oversight Activities. In LACAR 2019: Advances in Automation and Robotics Research; Springer: Cali, Colombia, 2019; pp. 22–30. [Google Scholar]
- Zeng, J.; Ju, R.; Qin, L.; Hu, Y.; Yin, Q.; Hu, C. Navigation in Unknown Dynamic Environments Based on Deep Reinforcement Learning. Sensors 2019, 19, 3837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, K.; Meng, Z.; Wang, L.; Wu, Z.; Wu, Z. Practical Obstacle Avoidance Path Planning for Agriculture UAVs. In IEA/AIE 2019: Wotawa F. Advances and Trends in Artificial Intelligence. From Theory to Practice; Springer: Graz, Austria, 2019; pp. 196–203. [Google Scholar]
- Juman, M.A.; Wong, Y.W.; Rajkumar, R.K.; H’Ng, C.Y. An integrated path planning system for a robot designed for oil palm plantations. In Proceedings of the TENCON 2017—2017 IEEE Region 10 Conference, Penang, Malaysia, 5–8 November 2017; pp. 1048–1053. [Google Scholar]
- Santos, L.C.; Santos, F.N.; Pires, E.S.; Valente, A.; Costa, P.; Magalhães, S. Path Planning for ground robots in agriculture: A short review. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Azores, Portugal, 15–17 April 2020; pp. 61–66. [Google Scholar]
- Pichler-Scheder, M.; Ritter, R.; Lindinger, C.; Amerstorfer, R.; Edelbauer, R. Path planning for semi-autonomous agricultural robots. In Reinventing Mechatronics; Yan, X.T., Ed.; Springer: Cham, Switzerland, 2020; pp. 35–53. [Google Scholar]
- Mai, T.; Shao, S.; Yun, Z. The Path Planning of Agricultural AGV in Potato Ridge Cultivation. Ann. Adv. Agric. Sci. 2019, 3, 32003. [Google Scholar] [CrossRef]
- Chikumbo, O.; Goodman, E.; Deb, K. Approximating a multidimensional Pareto front for a land use management problem: A modified MOEA with an epigenetic silencing metaphor. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation (CEC), Brisbane, Australia, 10–15 June 2012; pp. 1–9. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Population size | 30, 50, 100 |
| Maximum iteration | 50, 100, 200 |
| Farmland Square | 1000 m ∗ 1000 m ∗ 1000 m |
| r1, r2 | Rand [0,1] |
| a | linearly decreased from 2 to 0 over |
| A | [−2a, 2a] |
| C | Rand [0, 2] |
| Algorithm | Pop | Iter | UAV1 (Cost-m) | UAV2 (Cost-m) | UAV3 (Cost-m) | Overall Simulation Time (s) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Best | Ave | Worst | Best | Ave | Worst | Best | Ave | Worst | ||||
| GWO | 30 | 50 | 2199 | 2645 | 3385 | 2019 | 2328 | 2566 | 2148 | 2611 | 3526 | 8.416 |
| I-GWO | 30 | 50 | 2199 | 2736 | 3290 | 2087 | 2378 | 2579 | 2107 | 2446 | 2723 | 11.747 |
| EX-GWO | 30 | 50 | 2250 | 2649 | 3205 | 1996 | 2314 | 2655 | 2156 | 2713 | 4195 | 9.910 |
| GWO | 50 | 100 | 2145 | 2573 | 3295 | 1955 | 2234 | 2497 | 2095 | 2526 | 3469 | 15.040 |
| I-GWO | 50 | 100 | 2181 | 2558 | 3119 | 1993 | 2321 | 2520 | 2090 | 2361 | 2662 | 17.654 |
| EX-GWO | 50 | 100 | 2128 | 2621 | 3121 | 1918 | 2238 | 2593 | 2102 | 2638 | 4139 | 16.686 |
| GWO | 100 | 200 | 2070 | 2522 | 3202 | 1870 | 2136 | 2403 | 2026 | 2453 | 3417 | 23.378 |
| I-GWO | 100 | 200 | 2045 | 2537 | 3047 | 1936 | 2223 | 2466 | 2016 | 2261 | 2588 | 26.659 |
| EX-GWO | 100 | 200 | 2088 | 2479 | 2983 | 1858 | 2186 | 2528 | 2007 | 2568 | 4065 | 24.794 |
| Algorithm | Success Rate (Percent) | Rank |
|---|---|---|
| GWO | 5.56 | 3 |
| I-GWO | 38.88 | 2 |
| Ex-GWO | 55.56 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiani, F.; Seyyedabbasi, A.; Nematzadeh, S.; Candan, F.; Çevik, T.; Anka, F.A.; Randazzo, G.; Lanza, S.; Muzirafuti, A. Adaptive Metaheuristic-Based Methods for Autonomous Robot Path Planning: Sustainable Agricultural Applications. Appl. Sci. 2022, 12, 943. https://doi.org/10.3390/app12030943
Kiani F, Seyyedabbasi A, Nematzadeh S, Candan F, Çevik T, Anka FA, Randazzo G, Lanza S, Muzirafuti A. Adaptive Metaheuristic-Based Methods for Autonomous Robot Path Planning: Sustainable Agricultural Applications. Applied Sciences. 2022; 12(3):943. https://doi.org/10.3390/app12030943
Chicago/Turabian StyleKiani, Farzad, Amir Seyyedabbasi, Sajjad Nematzadeh, Fuat Candan, Taner Çevik, Fateme Aysin Anka, Giovanni Randazzo, Stefania Lanza, and Anselme Muzirafuti. 2022. "Adaptive Metaheuristic-Based Methods for Autonomous Robot Path Planning: Sustainable Agricultural Applications" Applied Sciences 12, no. 3: 943. https://doi.org/10.3390/app12030943
APA StyleKiani, F., Seyyedabbasi, A., Nematzadeh, S., Candan, F., Çevik, T., Anka, F. A., Randazzo, G., Lanza, S., & Muzirafuti, A. (2022). Adaptive Metaheuristic-Based Methods for Autonomous Robot Path Planning: Sustainable Agricultural Applications. Applied Sciences, 12(3), 943. https://doi.org/10.3390/app12030943