
A Novel Localization Method of Wireless Covert Communication Entity for Post-Steganalysis

Abstract
1. Introduction
- We propose to use the Gaussian filter model and the weighted distance strategy to select the reference point location. These two strategies can effectively reduce the influence of weak RSS and unstable reference points on the localization results and improve the localization precision.
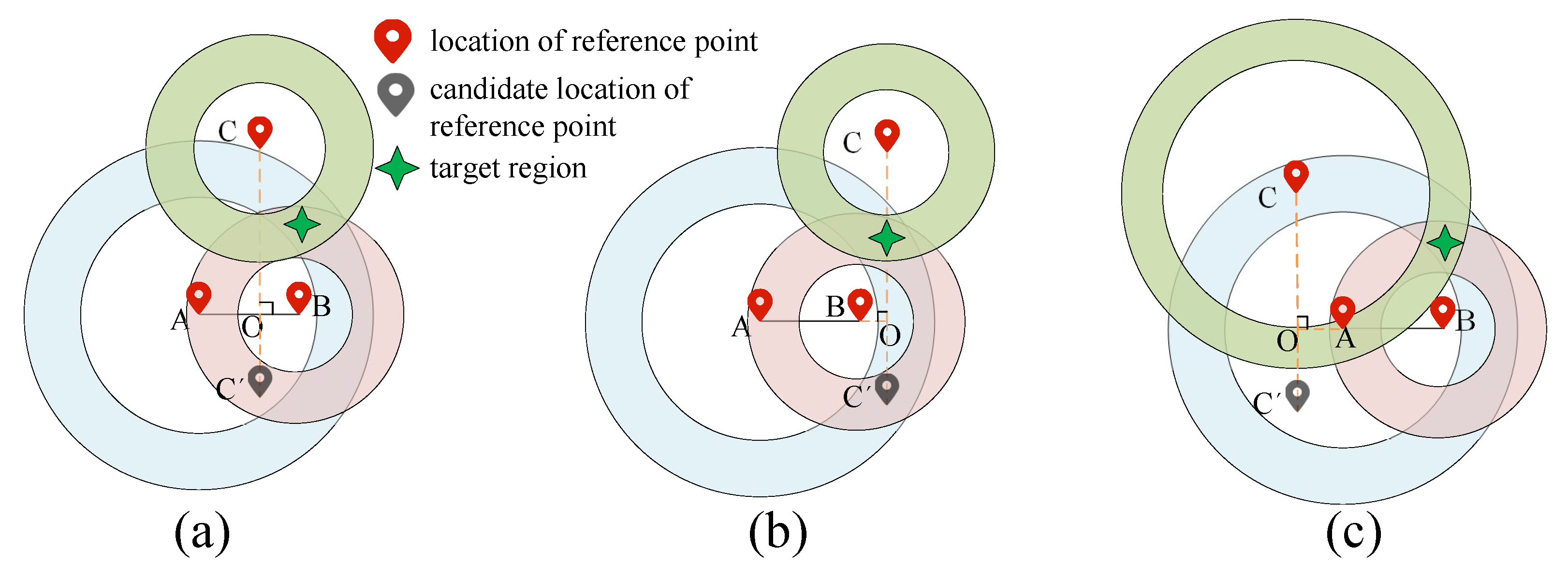
- Through multiple measurements, we find that the measured RSS at the same location will fluctuate up and down within a certain range. Compared with the circle used in the traditional method, this paper uses the ring as the region where the target node exists. Therefore, it will effectively narrow the region where the target node may appear, and then improve localization precision and the stability of localization results.
- The hybrid PSOGWO algorithm is first used in the field of wireless sensor node localization. The algorithm not only improves the localization precision of target node but also promotes localization efficiency.
2. Related Work
2.1. Localization Method Based on RSS
2.2. Hybird PSOGWO Principle
2.2.1. PSO
| Algorithm 1: The implementation process of PSO. |
 |
2.2.2. GWO
| Algorithm 2: The implementation process of GWO. |
 |
2.2.3. PSOGWO
| Algorithm 3: The implementation process of PSOGWO. |
 |
3. ILP-PSOGWO Method
- Step 1: Collect data. Determine the room where the target node is located and start to collect the signal strength to provide data support for building the signal attenuation model.
- Step 2: Process data. To obtain more reliable data, we use Gaussian filtering to filter the signal strength obtained in Step 1.
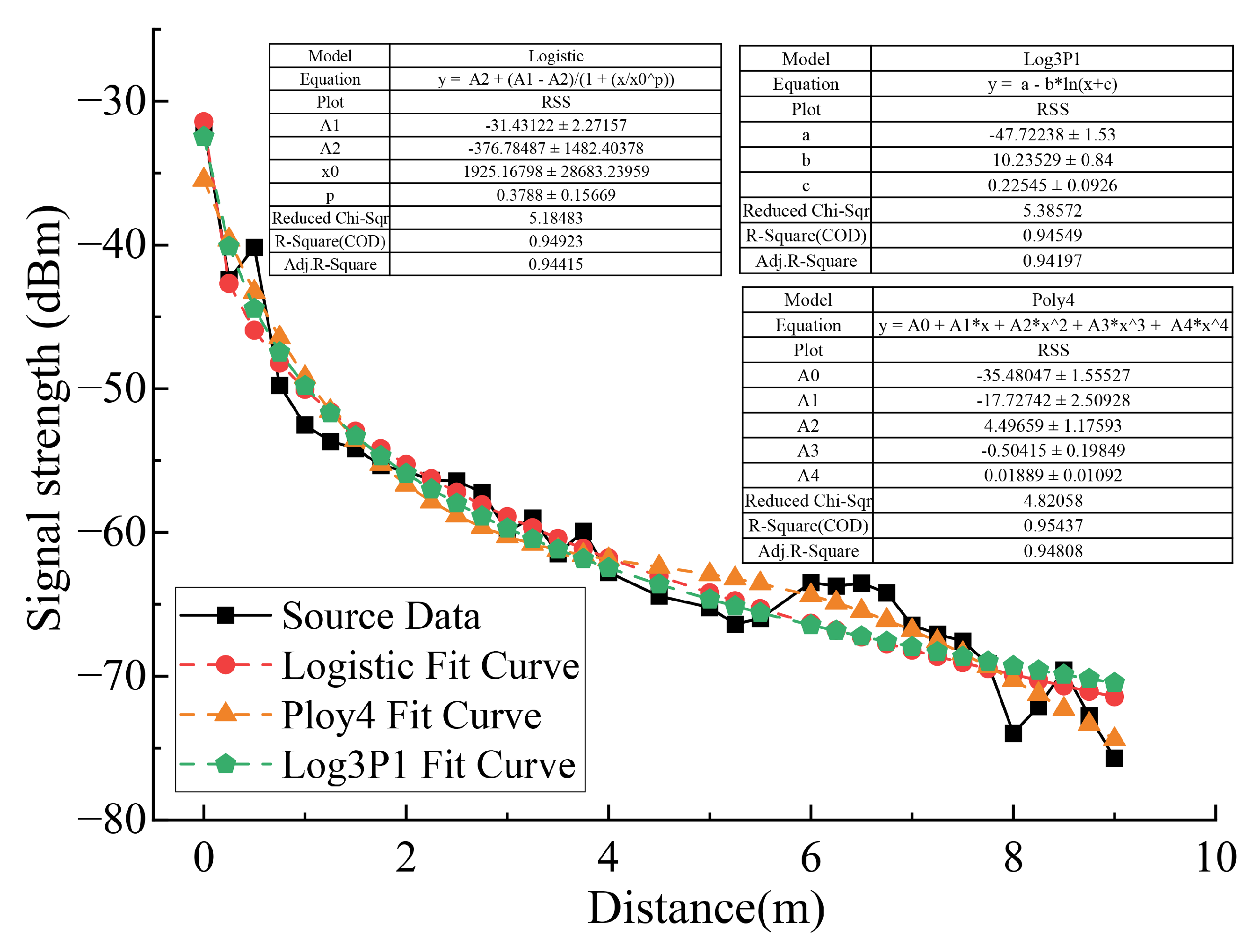
- Step 3: Fit Data. The obtained signal strength and distance are fitted, and the relationship model between signal strength and distance is constructed.
- Step 4: Evaluate model. Use the model evaluation criteria to evaluate the relationship model between signal strength and distance constructed in step 3, and select a model with the best fitting degree.
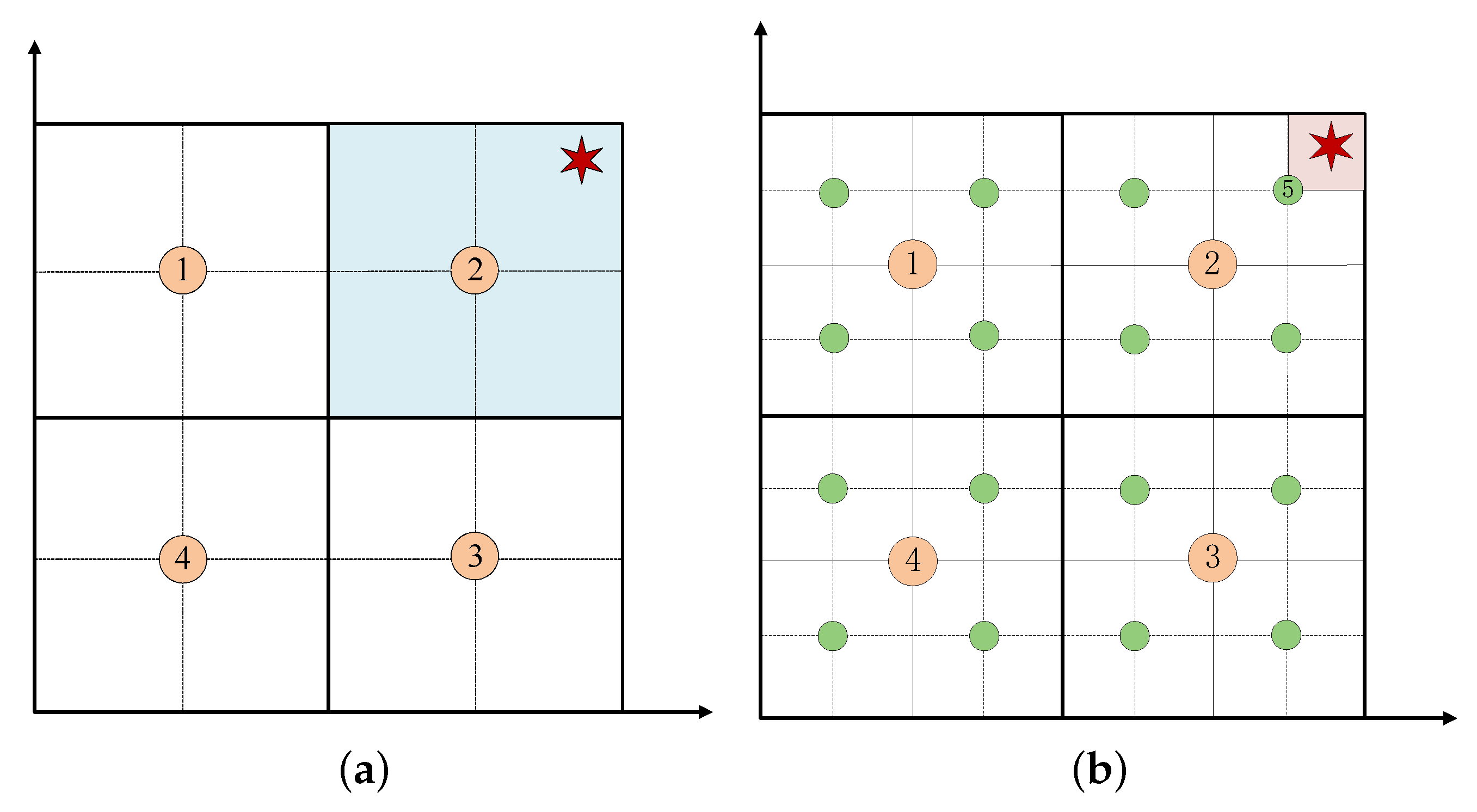
- Step 5: Determine and narrow the selected region of reference point. Use the dichotomy to divide the room to be located, and further narrow the region where the target node is located.
- Step 6: Deploy the location of reference points. Several possible situations of reference point deployments are given, and the location of reference point deployment is limited.
- Step 7: Adopt the weighted distance strategy to select the reference points. The selection of reference points will directly affect the localization precision of the target node. This paper proposes to use the weighted distance strategy to select reference points with strong and stable signal strength.
- Step 8: Use the PSOGWO algorithm to locate. According to the location information obtained above, the hybrid PSOGWO algorithm is used to locate and optimize the target node location.
3.1. Construction and Analysis of the Relationship Model between the RSS and Distance
3.1.1. Data Acquisition and Processing
3.1.2. Model Evaluation
3.2. Selection Strategy of Reference Point Location
3.2.1. Determine and Narrow the Selected Region of Reference Point
3.2.2. Deployment Strategy of Reference Point Location
3.2.3. Weighted Distance Strategy for Selecting Reference Points
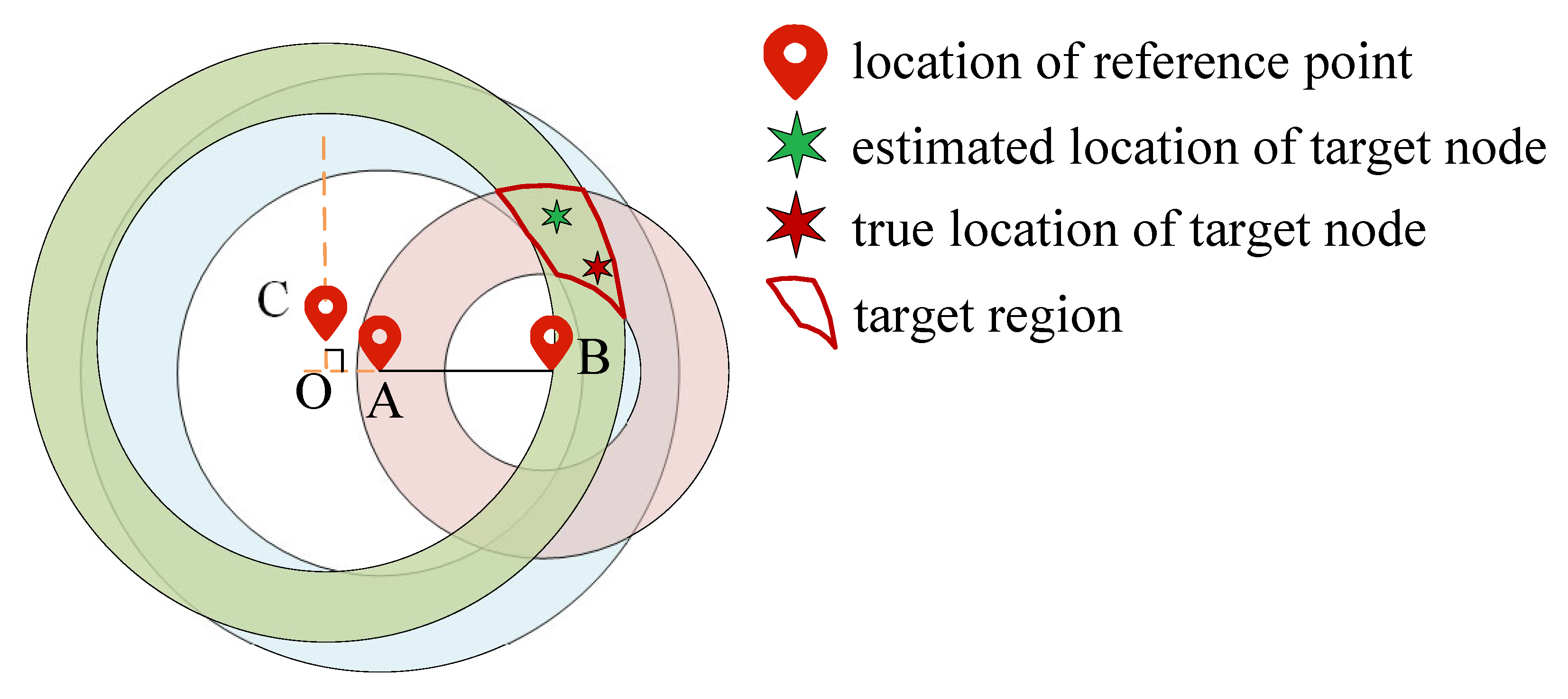
3.3. Locating the Target Node
- Step 1: As shown in Figure 12a, initialize the gray wolf population N in the target region, and each gray wolf represents the potential location of the target node.

- Step 2: Calculate the fitness of gray wolf individuals and save the first three gray wolves with the best fitness , and . The calculation equation of fitness value is as follows:wherewhere represents the fitness value of gray wolf i. The smaller the fitness value, the closer the actual location of the gray wolf and target node. and represent the reference point location and each gray wolf, is the distance from the reference point to each gray wolf, is the distance from the reference point to the target node and n is the number of reference points. The fitness ranking of the gray wolf may encounter the situation of equal fitness values, as shown in Figure 12b; the distance between gray wolf i and j to the three reference points are equal, that is, . At this time, the fitness values of the two gray wolves are also equal, indicating that the gray wolf locations coincide, but in practice, gray wolf i’s location is not equal to gray wolf j’s location, which will affect the target node location. Therefore, if the fitness values of gray wolves are equal, this paper proposes to use the following conditions for exclusion:where and represent the distance from gray wolf i and j to the first reference point, respectively.
- Step 3: Update the current location of the gray wolf.
- Step 4: Update a, A and C.
- Step 5: Calculate the fitness of all gray wolves.
- Step 6: Update the fitness and location of , and .
- Step 7: Judge whether the maximum number of iterations or the fitness threshold is reached. If yes, exit the loop and output the target node location. Otherwise, go to Step 3 and continue.
4. Experiment
4.1. Experiment Setting
4.2. Performance Evaluation
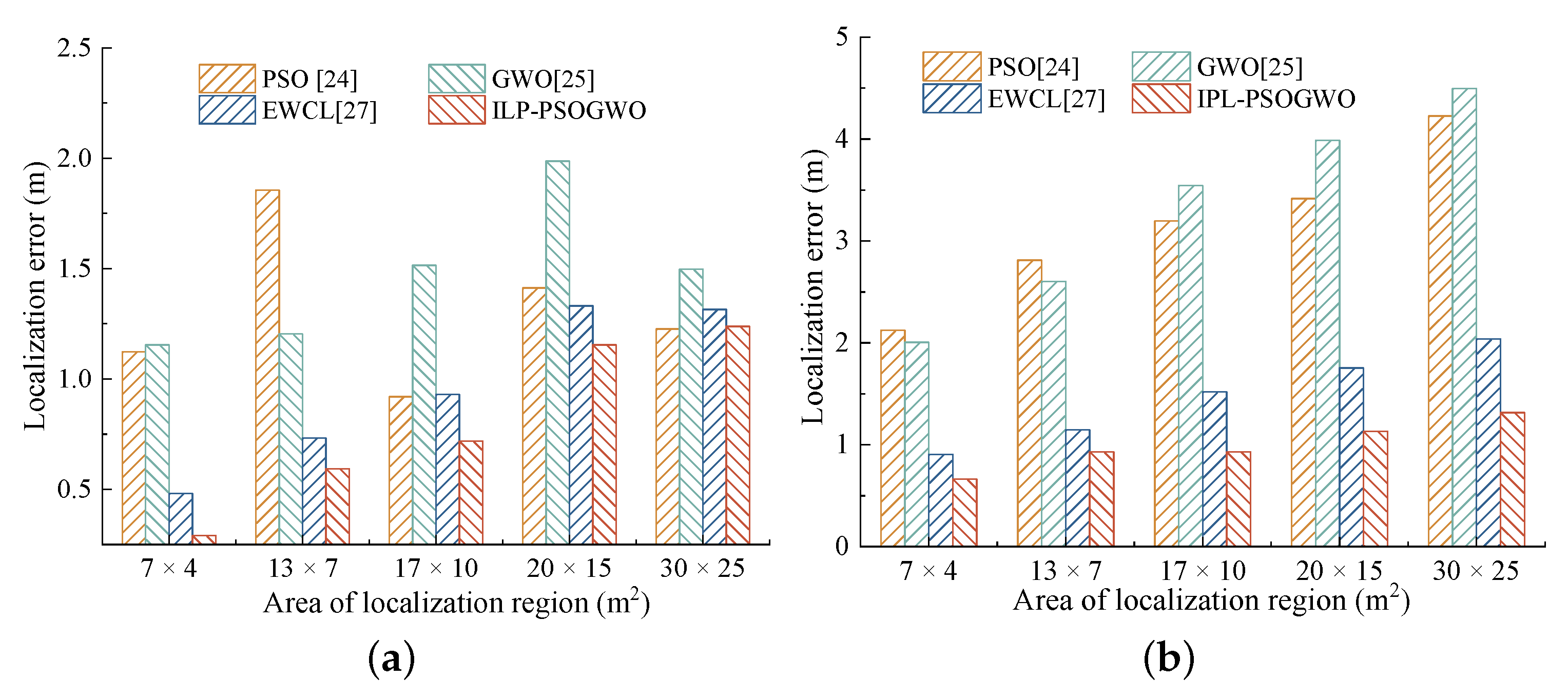
4.2.1. Impact of Area of Localization Region on Localization Precision
4.2.2. Impact of Location of Test Point on Localization Precision
4.2.3. Impact of the Number of Reference Point on Localization Precision
4.2.4. Impact of Iteration Times on Localization Precision
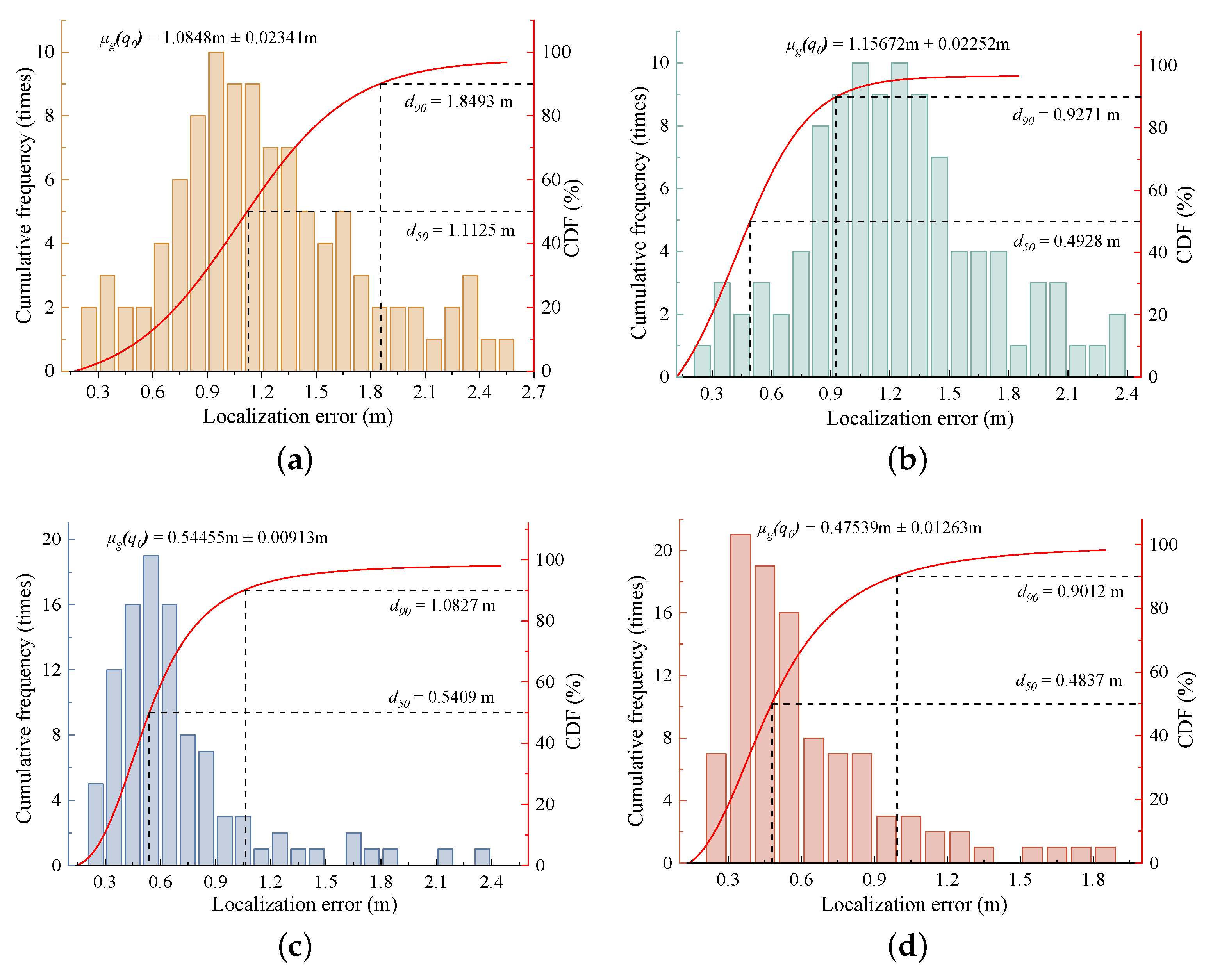
4.2.5. Stability
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Zhu, L.; Jiang, P.; Zhang, C.; Gao, F.; He, J.; Xu, D.; Zhang, Y. Blockchain Meets Covert Communication: A Survey. IEEE Commun. Surv. Tutorials 2022, 24, 2163–2192. [Google Scholar] [CrossRef]
- Podilchuk, C.I.; Delp, E.J. Digital watermarking: Algorithms and applications. IEEE Signal Process. Mag. 2001, 18, 33–46. [Google Scholar] [CrossRef]
- Cheddad, A.; Condell, J.; Curran, K.; Kevitt, P.M. Digital image steganography: Survey and analysis of current methods. Signal Process. 2010, 90, 727–752. [Google Scholar] [CrossRef]
- Megías, D.; Mazurczyk, W.; Kuribayashi, M. Data Hiding and Its Applications: Digital Watermarking and Steganography. Appl. Sci. 2021, 11, 10928. [Google Scholar] [CrossRef]
- Wu, Z.; Guo, J. AMR Steganalysis based on Adversarial Bi-GRU and Data Distillation. In Proceedings of the the 2022 ACM Workshop on Information Hiding and Multimedia Security (IH & MMSec), Santa Barbara, CA, USA, 27–28 June 2022; pp. 141–146. [Google Scholar]
- Zhang, F.; Liu, F.; Luo, X. Geolocation of covert communication entity on the Internet for post-steganalysis. EURASIP J. Image Video Process. 2020, 2020, 1–10. [Google Scholar] [CrossRef]
- Zhao, H.; Shi, Y.Q. Detecting covert channels in computer networks based on chaos theory. IEEE Trans. Inf. Forensics Secur. 2012, 8, 273–282. [Google Scholar] [CrossRef]
- Illiano, V.P.; Lupu, E.C. Detecting malicious data injections in wireless sensor networks: A survey. ACM Comput. Surv. (CSUR) 2015, 48, 1–33. [Google Scholar] [CrossRef]
- Hall, D.L.; Narayanan, R.M.; Lenzing, E.H.; Jenkins, D.M. Passive vector sensing for non-cooperative emitter localization in indoor environments. Electronics 2018, 7, 442. [Google Scholar] [CrossRef]
- Yang, B.; Guo, L.; Guo, R.; Zhao, M.; Zhao, T. A novel trilateration algorithm for RSSI-based indoor localization. IEEE Sensors J. 2020, 20, 8164–8172. [Google Scholar] [CrossRef]
- Sheu, J.P.; Chen, P.C.; Hsu, C.S. A distributed localization scheme for wireless sensor networks with improved grid-scan and vector-based refinement. IEEE Trans. Mobile Comput. 2008, 7, 1110–1123. [Google Scholar] [CrossRef]
- Yang, B.; Qiu, Q.; Han, L.; Yang, F. Received signal strength indicator-based indoor localization using distributed set-membership filtering. IEEE Trans. Cybern. 2020, 2020, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Lin, M.; Huang, Y.; Li, B.; Huang, Z.; Zhang, Z.; Zhao, W. Deep Learning-Based Multiple Co-Channel Sources Localization Using Bernoulli Heatmap. Electronics 2022, 11, 1551. [Google Scholar] [CrossRef]
- Kang, J.; Kim, D.; Kim, Y. RSS self-calibration protocol for WSN localization. In Proceedings of the 2nd International Symposium on Wireless Pervasive Computing, San Juan, PR, USA, 5–7 February 2007; pp. 1–4. [Google Scholar]
- Nguyen, C.L.; Georgiou, O.; Suppakitpaisarn, V. Improved localization accuracy using machine learning: Predicting and refining RSS measurements. In Proceedings of the IEEE Globecom Workshops, Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Zhao, D.; Bai, F.; Dong, S.; Li, H. An Improved Triangle Centroid Location Algorithm Based on Kalman Filtering and Linear Interpolation. Chin. J. Sensors Actuators 2015, 7, 1086–1090. [Google Scholar]
- Tang, J.; Han, J. An improved received signal strength indicator localization algorithm based on weighted centroid and adaptive threshold selection. Alex. Eng. J. 2021, 60, 3915–3920. [Google Scholar] [CrossRef]
- Cho, Y.; Ji, M.; Lee, Y.; Park, S. Wi-Fi AP position estimation using contribution from heterogeneous mobile devices. In Proceedings of the IEEE Symposium on Position Location and Navigation Symposium (PLANS), Myrtle Beach, CA, USA, 23–26 April 2012; pp. 562–567. [Google Scholar]
- Luo, J.; Zhang, Z.; Wang, C.; Xiao, D. Indoor multifloor localization method based on WiFi fingerprints and LDA. IEEE Trans. Ind. Informatics 2019, 15, 5225–5234. [Google Scholar] [CrossRef]
- Han, D.; Andersen, D.G.; Kaminsky, M.; Papagiannaki, K.; Seshan, S. Access Point Localization Using Local Signal Strength Gradient. In Proceedings of the International Conference on Passive and active network measurement (PAM), Seoul, Korea, 1–3 April 2009; pp. 99–108. [Google Scholar]
- Sun, Y.; Xiao, J.; Li, X.; Cabrera-Mora, F. Adaptive source localization by a mobile robot using signal power gradient in sensor networks. In Proceedings of the Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–5. [Google Scholar]
- Awad, F.; Hussien, D.A.; Al-Qura An, B.T. WiMap: An Efficient Wi-Fi Access Point Localization Mechanism. In Proceedings of the International Computer Sciences and Informatics Conference (ICSIC), Amman, Jordan, 12–13 January 2016; pp. 1–10. [Google Scholar]
- Awad, F.; Naserllah, M.; Omar, A.; Abu-Hantash, A.; Al-Taj, A. Collaborative indoor access point localization using autonomous mobile robot swarm. Sensors 2018, 18, 407. [Google Scholar] [CrossRef] [PubMed]
- Awad, F.; Al-Refai, M.; Al-Qerem, A. Rogue access point localization using particle swarm optimization. In Proceedings of the 8th International Conference on Information and Communication Systems (ICICS), Irbid, Jordan, 4–6 April 2017; pp. 282–286. [Google Scholar]
- Seyedali, M.M.; Seyed, M.; Andrew, L. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar]
- Ketkhaw, A.; Thipchaksurat, S. Location Prediction of Rogue Access Point Based on Deep Neural Network Approach. J. Mob. Multimed. 2022, 2022, 1063–1078. [Google Scholar] [CrossRef]
- Booranawong, A.; Sengchuai, K.; Jindapetch, N.; Saito, H. Enhancement of RSSI-based localization using an extended weighted centroid method with virtual reference node information. J. Electr. Eng. Technol. 2020, 15, 1879–1897. [Google Scholar] [CrossRef]
- Blumenthal, J.; Grossmann, R.; Golatowski, F.; Timmermann, D. Weighted centroid localization in zigbee-based sensor networks. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing, San Juan, PR, USA, 3–5 October 2007; pp. 1–6. [Google Scholar]
- Wang, J.; Urriza, P.; Han, Y.; Cabric, D. Weighted centroid localization algorithm: Theoretical analysis and distributed implementation. IEEE Trans. Wirel. Commun. 2011, 10, 3403–3413. [Google Scholar] [CrossRef]
- Alhammadi, A.; Hashim, F.; Fadlee, M.; Shami, T.M. An adaptive localization system using particle swarm optimization in a circular distribution form. J. Teknol. 2016, 2016, 105–110. [Google Scholar] [CrossRef]
- Cai, X.; Ye, L.; Zhang, Q. Ensemble learning particle swarm optimization for real-time UWB indoor localization. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 1–15. [Google Scholar] [CrossRef]
- Kamboj, V.K. A novel hybrid PSO-GWO approach for unit commitment problem. Neural Comput. Appl. 2016, 27, 1643–1655. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W.; Alhady, S.S.; Ali, A.; Mir, I.; Jalil, A. Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO-GWO optimization algorithm with evolutionary programming. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 7873–7890. [Google Scholar] [CrossRef]
- Adnan, R.M.; Mostafa, R.R.; Kisi, O.; Yaseen, Z.M.; Shahid, S.; Zounemat-Kermani, M. Improving streamflow prediction using a new hybrid ELM model combined with hybrid particle swarm optimization and grey wolf optimization. Knowl.-Based Syst. 2021, 230, 107379–107398. [Google Scholar] [CrossRef]
- Hou, G.; Xu, Z.; Liu, X.; Jin, C. Improved particle swarm optimization for selection of shield tunneling parameter values. Comput. Model. Eng. Sci. 2019, 118, 317–337. [Google Scholar]
- Singh, S.P.; Sharma, S.C. A PSO based improved loacalization algorithm for wireless sensor network. Wirel. Pers. Commun. 2018, 98, 487–503. [Google Scholar] [CrossRef]
- Venkatakrishnan, G.R.; Rengaraj, R.; Salivahanan, S. Grey wolf optimizer to real power dispatch with non-linear constraints. Comput. Model. Eng. Sci. 2018, 115, 25–45. [Google Scholar]
- Dev, K.; Poluru, R.K.; Kumar, R.L. Optimal radius for enhanced lifetime in IoT using hybridization of rider and grey wolf optimization. IEEE Trans. Green Commun. Netw. 2021, 5, 635–644. [Google Scholar] [CrossRef]
- El-Hasnony, I.M.; Barakat, S.I.; Elhoseny, M.; Mostafa, R.R. Improved feature selection model for big data analytics. IEEE Access 2020, 8, 66989–67004. [Google Scholar] [CrossRef]
- Mahapatra, R.K.; Shet, N.S.V. Localization based on RSSI exploiting gaussian and averaging filter in wireless sensor network. Arab. J. Sci. Eng. 2018, 43, 4145–4159. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| The number of target nodes | 1 |
| Experimental environment | LOS, NLOS |
| The number of reference points | 3, 5, 7, 9, 11, 13 |
| Area of localization region () | 15, 20, 25, 30, 35, 40 |
| The number of iterations | 5, 10, 15, 20, 25, 30, 35 |
| The number of experiments | 5, 10, 15, 20, 25, 30, 35, 40, 45, 50, 100 |
| Test points location | (2.5, 5), (8, 7.3), (14.8, 6.2), (5.5, 9), (11.2, 7.8), (16, 5.1) |
| Environmental Environment | Localization Method | Test Points Location | |||||
|---|---|---|---|---|---|---|---|
| (2.5, 5) | (8, 7.3) | (14.8, 6.2) | (5.5, 9) | (11.2, 7.8) | (16, 5.1) | ||
| LOS | PSO [24] | 0.9196 | 1.3290 | 0.9832 | 1.2939 | 1.2037 | 0.9987 |
| GWO [25] | 1.5143 | 1.4980 | 1.0372 | 1.3258 | 1.1835 | 0.8999 | |
| EWCL [27] | 0.8675 | 1.0903 | 0.8099 | 0.9099 | 0.7936 | 0.7091 | |
| ILP-PSOGWO | 0.7186 | 0.8021 | 0.5289 | 0.6503 | 0.5910 | 0.4521 | |
| NLOS | PSO [24] | 2.0326 | 2.5710 | 1.7825 | 2.0627 | 2.0320 | 2.1833 |
| GWO [25] | 2.7921 | 2.3467 | 1.9732 | 2.1362 | 2.2693 | 1.7902 | |
| EWCL [27] | 1.1290 | 1.2293 | 0.9021 | 1.1798 | 0.8998 | 0.9098 | |
| ILP-PSOGWO | 0.9027 | 1.0363 | 0.7936 | 0.9831 | 0.7352 | 0.5621 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, G.; Ding, S.; Yang, H.; Liu, W.; Yin, M.; Li, L. A Novel Localization Method of Wireless Covert Communication Entity for Post-Steganalysis. Appl. Sci. 2022, 12, 12224. https://doi.org/10.3390/app122312224
Wei G, Ding S, Yang H, Liu W, Yin M, Li L. A Novel Localization Method of Wireless Covert Communication Entity for Post-Steganalysis. Applied Sciences. 2022; 12(23):12224. https://doi.org/10.3390/app122312224
Chicago/Turabian StyleWei, Guo, Shichang Ding, Haifeng Yang, Wenyan Liu, Meijuan Yin, and Lingling Li. 2022. "A Novel Localization Method of Wireless Covert Communication Entity for Post-Steganalysis" Applied Sciences 12, no. 23: 12224. https://doi.org/10.3390/app122312224
APA StyleWei, G., Ding, S., Yang, H., Liu, W., Yin, M., & Li, L. (2022). A Novel Localization Method of Wireless Covert Communication Entity for Post-Steganalysis. Applied Sciences, 12(23), 12224. https://doi.org/10.3390/app122312224