1. Introduction
According to Boeing, Airbus, EASA (European Union Aviation Safety Agency), and ICAO (International Civil Aviation Organization) [
1,
2,
3,
4], more than 50% of fatal accidents occur during final approach and landing. Due to its irreplaceable nature, landing gear performance directly affects aircraft takeoffs and landings. A significant part of the landing gear retraction/extension process is the retraction/extension (R/E) hydraulic system. Hydraulic transmissions, in comparison with gear mechanical transmissions, are able to achieve a wide range of stepless speed regulation, which is essential to the smooth retraction/extension of landing gears within the specified timeframe [
5,
6]. Fault detection, on the other hand, is the first step in implementing fault diagnosis technology. Unless the detection is accurate and effective, it will be difficult to isolate faults in the future, and it will also affect subsequent health assessment and maintenance. It is therefore essential to detect faults accurately.
Research methods for fault diagnosis of complex nonlinear systems such as hydraulic systems fall into three categories: knowledge-based, data-driven, and model-based [
7]. In knowledge-based methods, knowledge reasoning and long-term accumulated experience knowledge are mainly used [
8,
9,
10]. In data-driven analysis, a large amount of online and offline data from the system is analyzed [
11,
12,
13,
14]. Sara Nasiri and others [
15] have made a detailed review of fault failure analysis in the traditional mechanical field from the perspective of artificial intelligence, involving artificial neural networks, Bayesian networks, genetic algorithms, fuzzy logic, and case-based reasoning.
Based on a model-based approach, this work examines whether there is a consistency criterion between the system’s actual output and its expected output. State estimation methods, parameter estimation methods, and equivalent space methods are kinds of model-based methods.
Generally, state estimation methods compare the state output of the system model with the output of the actual system to generate system residuals that are used as consistency criteria. Observer and filter methods are used, with Kalman filter being the most commonly used. Most of the studied systems are nonlinear systems, which are inevitably affected by various factors such as the uncertainty of model parameters, the interaction between components and systems, the interaction between environment and systems, and noise. Therefore, most experts and scholars mainly focus on the robust state estimation of nonlinear systems. In the research of observer methods, Hu Zhenggao [
16] proposed nonlinear adaptive unknown input observer, Liu Yingming [
17] studied the sliding mode control of rolling mills using a disturbance observer, and Xu Guosheng [
18] studied the sliding mode control of excavator based on a high-gain observer. In the research of the Kalman filter, various improved Kalman filters or their variants have been produced, such as the extended Kalman filter [
19], multiple outlier robust Kalman filter [
20], federated Kalman filter [
21], unscented Kalman filter [
22], distributed Kalman filter [
23], etc.
In the parameter estimation method, the estimated physical parameters are compared with the nominal values in order to generate the system residual. This serves as a consistency criterion for the core idea. There are two common estimation methods: joint estimation and minimum error estimation. In the joint estimation method [
24,
25], the estimated parameters are used as the extension of the state, and the state estimation method is used to estimate the state and parameter. Despite its simplicity and speed, this method may result in dimension disaster if the space dimension is too high after expansion. Compared to the extended state space method, the method based on multi structure observer and filter [
26] has stronger robustness and lower computational difficulty. Further, the minimum error method [
27] is mostly used for off-line fault diagnosis, and its accuracy depends on the completeness of data samples.
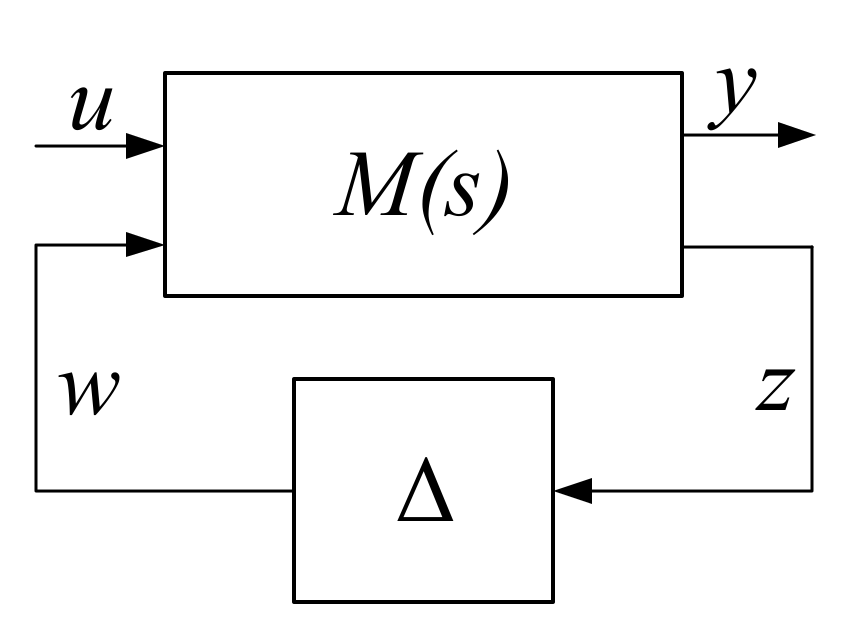
A core principle of equivalent space method is to use the residual between the input and output of the analytical model of the system as a consistency criterion. Using hardware redundancy, multiple redundant sensors are set up and residuals are derived from the measurement model for analysis. Although this method is simple and easy, it also requires multiple redundant sensors, so its cost is high. As a consistency criterion of the core diagnosis idea, an analytical redundancy relations (ARRs) method builds the residual indirectly through an analytical mathematical model. Using a power bond graph and relying on the energy conservation law, this method has some drawbacks, including parameter uncertainty, sensor measurement uncertainty, environmental impact, and noise. As a result, the residual generated by the system will fluctuate, leading to misdiagnosis and missed diagnoses. It is necessary to incorporate system uncertainty robustness into the bond graph model to improve this problem. Bond graph-linear fractional transformation (BG-LFT) is the most effective solution to this problem. On the basis of this technology, Mo Haobin [
28] proposed a fault diagnosis method based on interval analytical redundancy relationships in order to avoid the interference of system uncertainty on diagnosis results. Wang Fang [
29] designed a robust diagnosis observer for hybrid systems, and combined BG-LFT and proportional integrator to realize robust fault diagnosis and estimation, which improved the detection effect. M.A. Djeziri [
30] believes that all uncertainties are cumulative in the diagnosis threshold of node residual. In this way, uncertainty interaction will be ignored, which may lead to overestimation of the diagnosis threshold.
The previous literature [
31] mainly focuses on evaluating the system’s health after fault detection. This paper is an application-oriented innovation that focuses on detecting faults accurately, so that the process of fault detection can be improved. On the basis of the uncertain interference factors, this paper addresses the goal of accurately detecting the preset faults of the landing gear R/E hydraulic system.
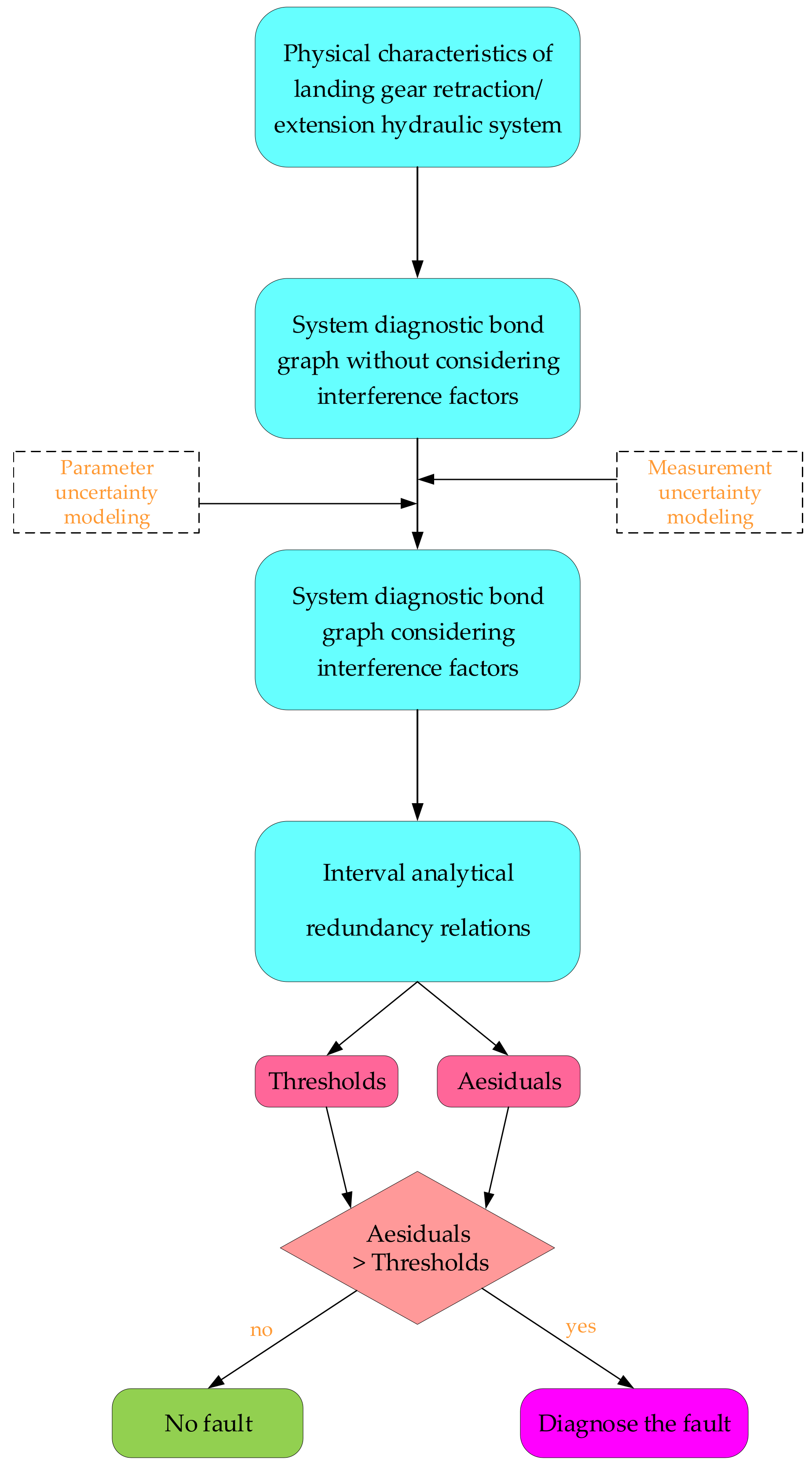
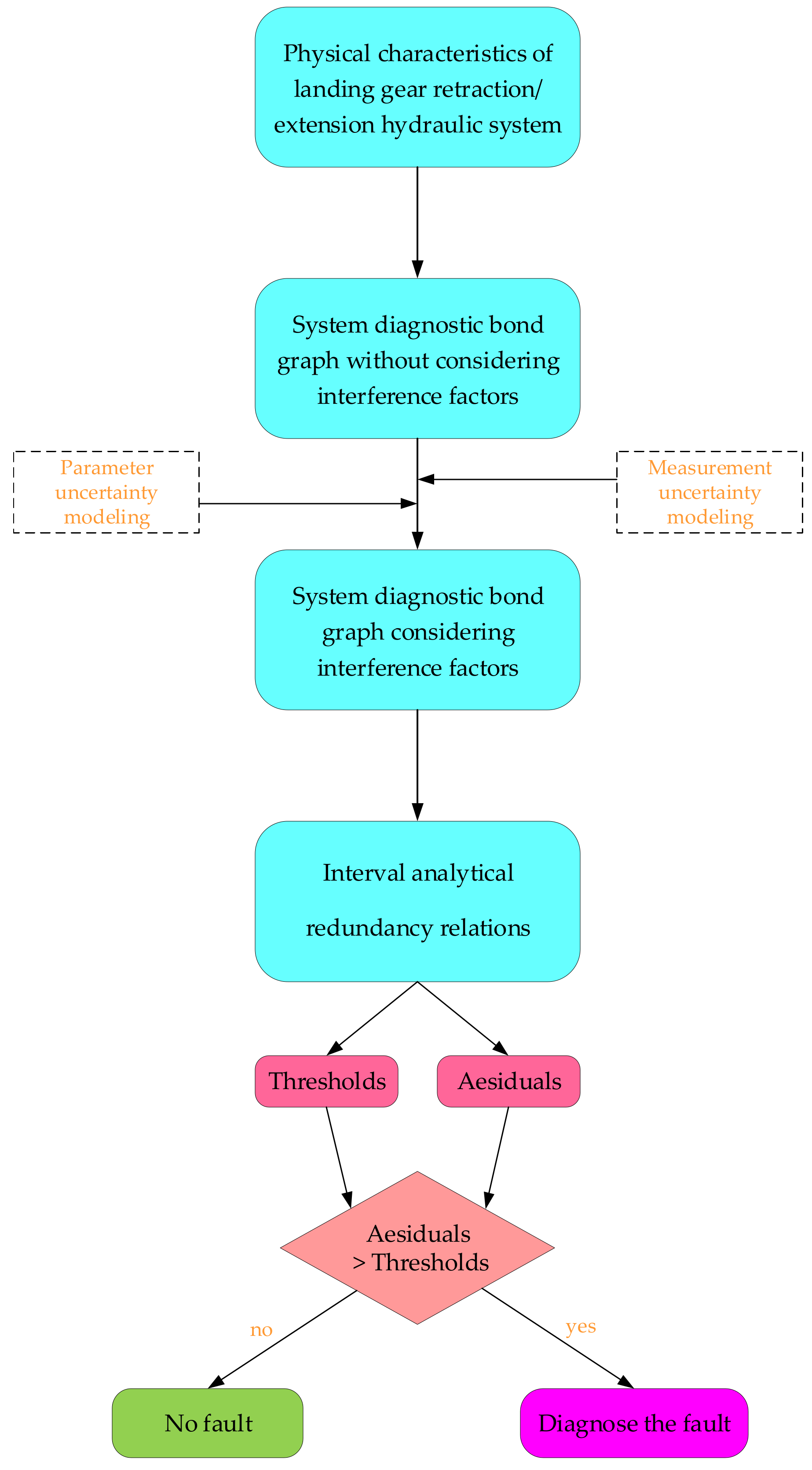
Figure 1 illustrates the analysis process and train of thought. Contributions include:
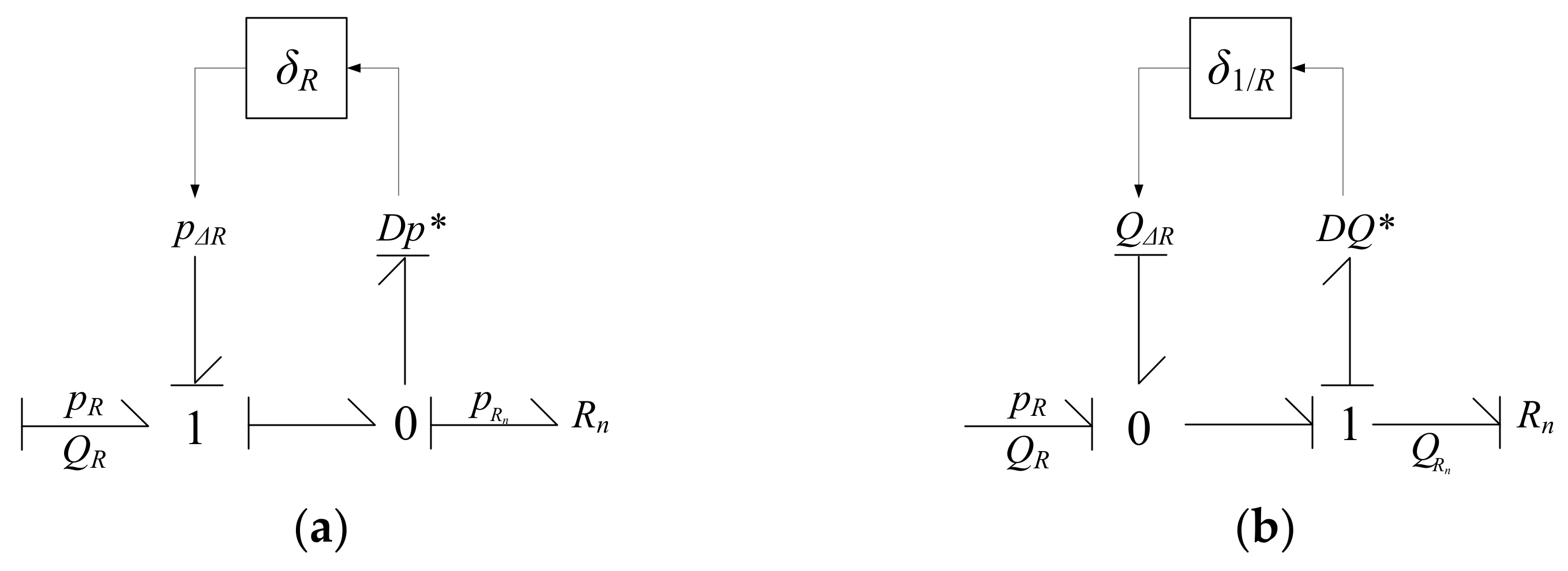
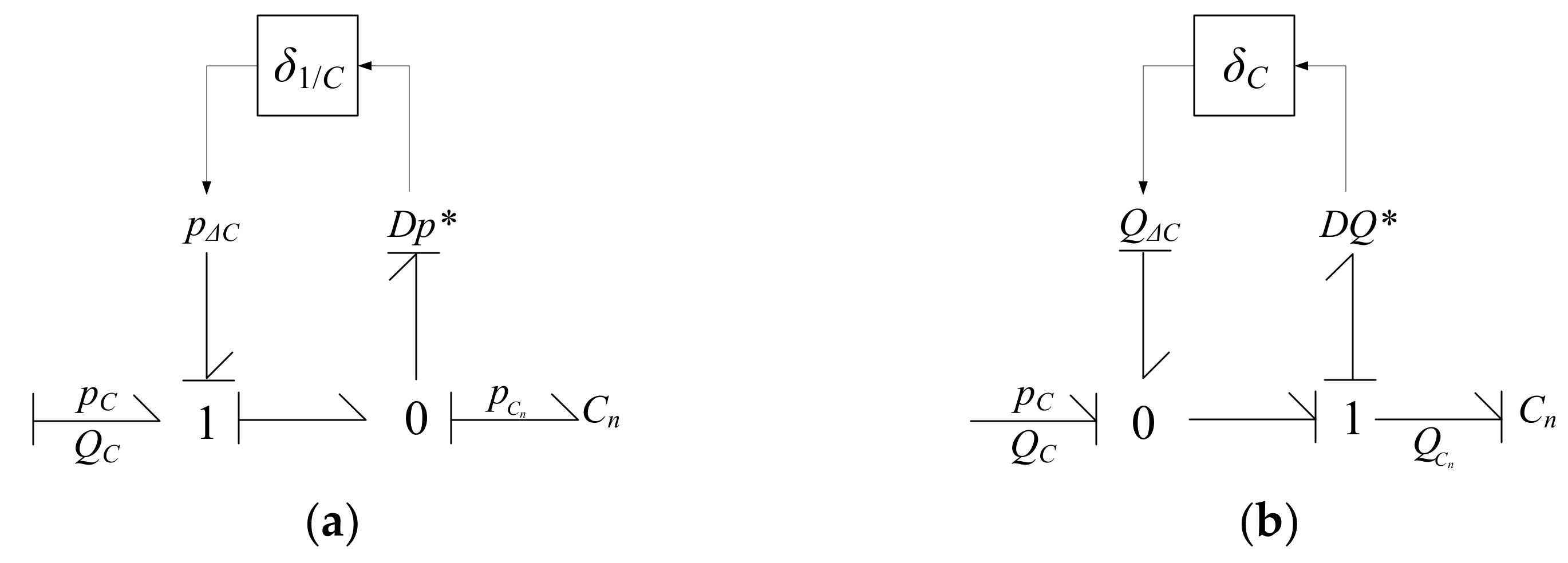
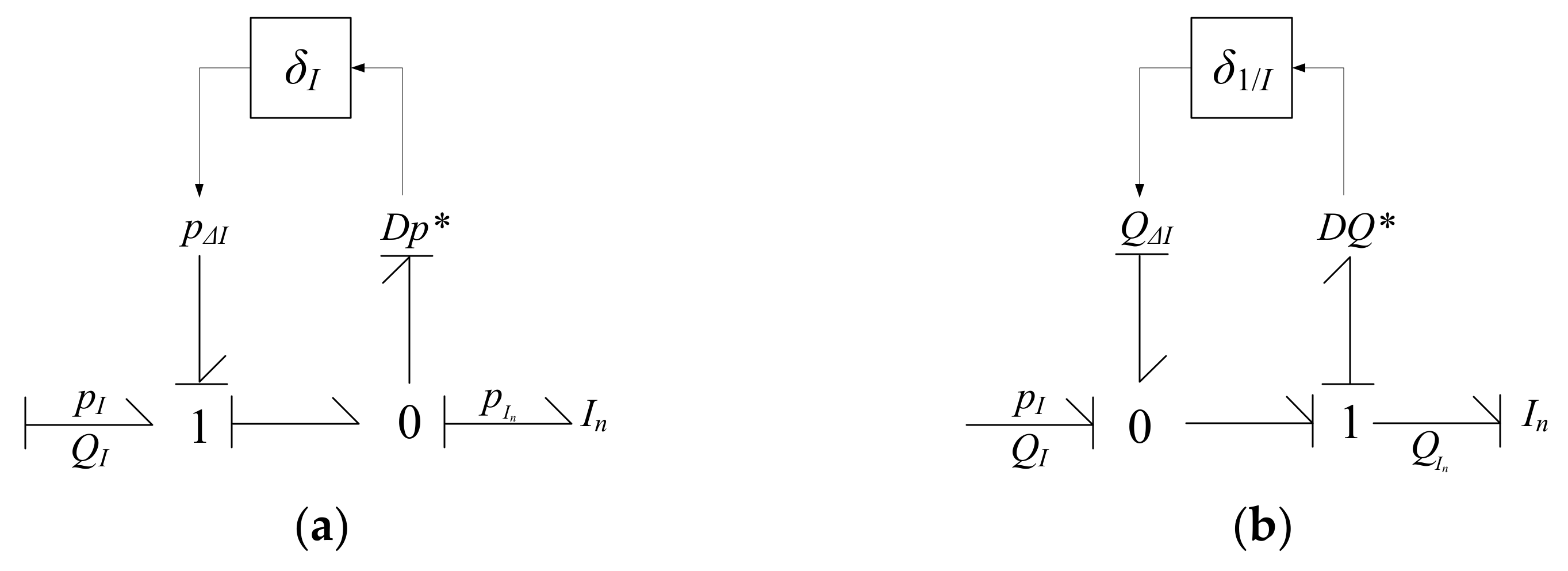
When studying fault diagnosis for dynamic system models, various uncertain interference factors must be taken into account. For this reason, bond graph linear fractional transformation and interval analytical redundancy relations are used together.
Preliminarily, the relevant landing gear R/E hydraulic fault parameters are detected and isolated using the fault signature matrix (FSM).
Asymmetric interval thresholds have better detection accuracy and sensitivity than absolute thresholds, according to fault case analyses.
Figure 1.
Analysis process and train of thought.
Figure 1.
Analysis process and train of thought.
4. Fault Diagnosis Based on Traditional and Interval Analytical Redundancy Relations
4.1. Traditional Analytical Redundancy Relations Method
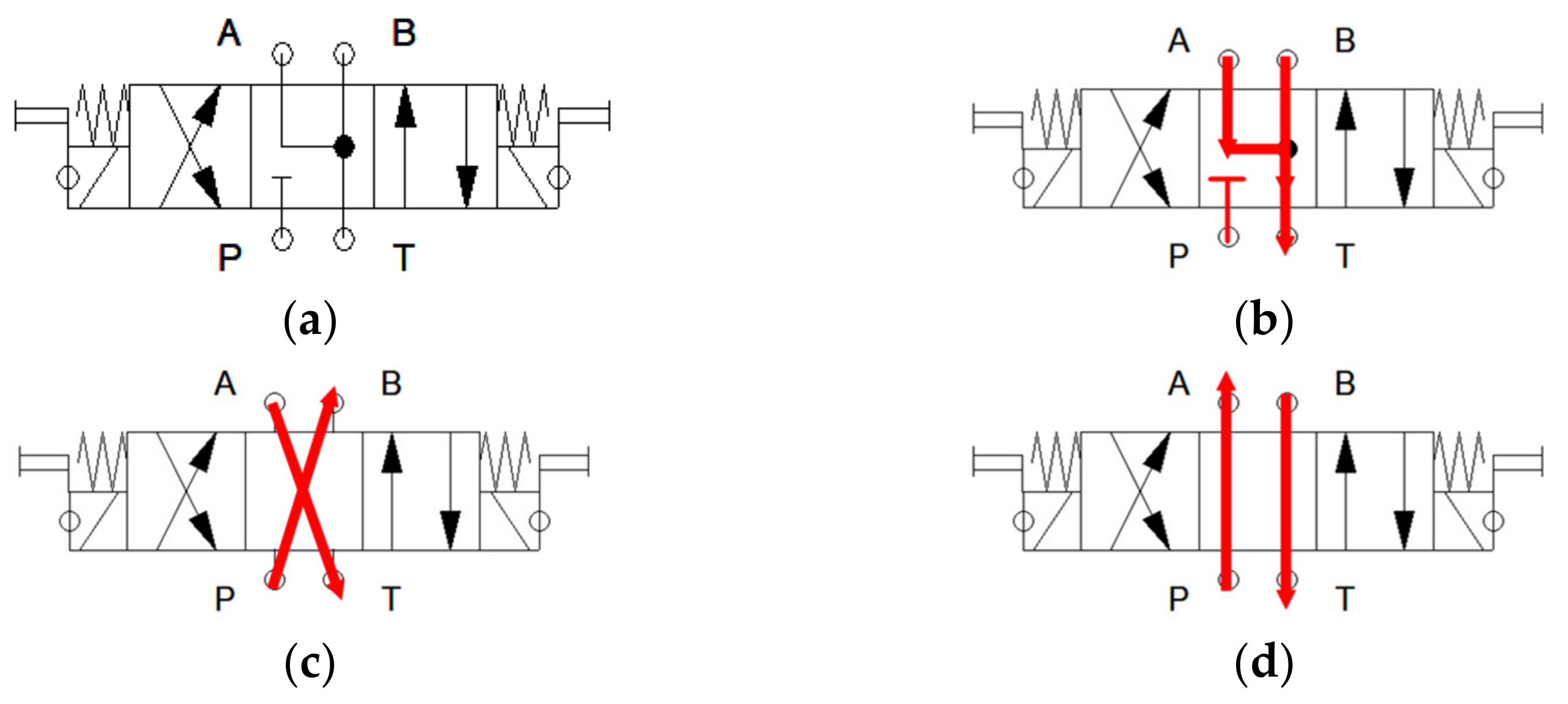
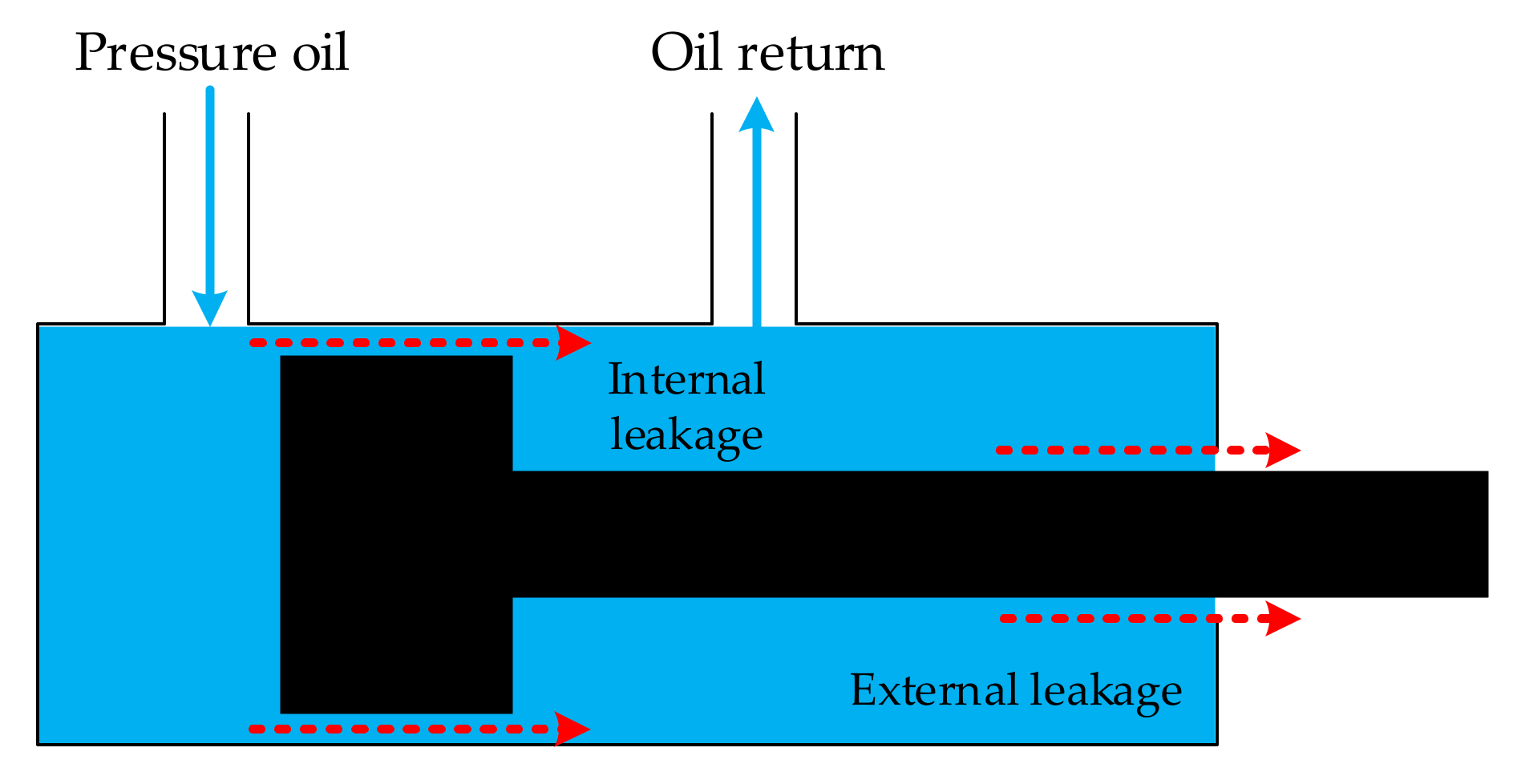
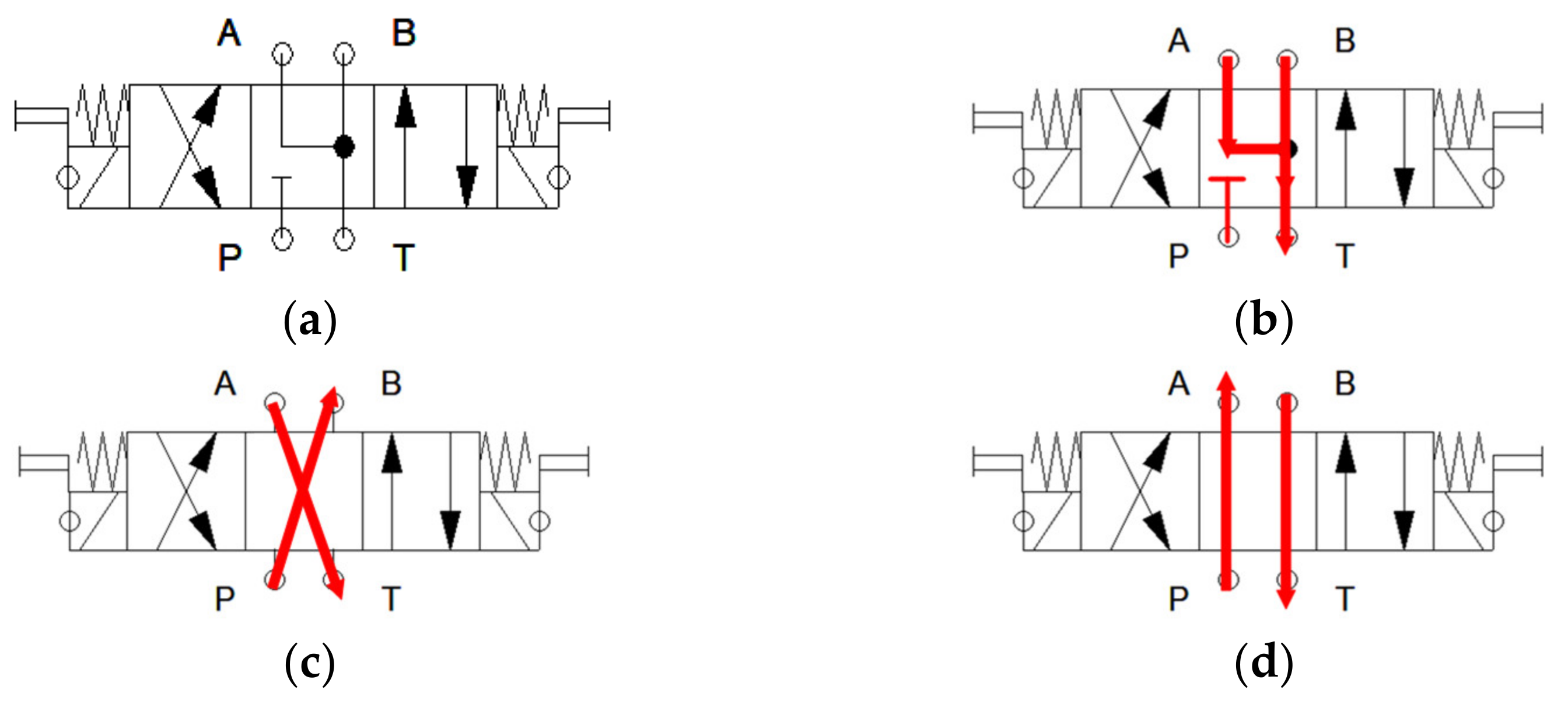
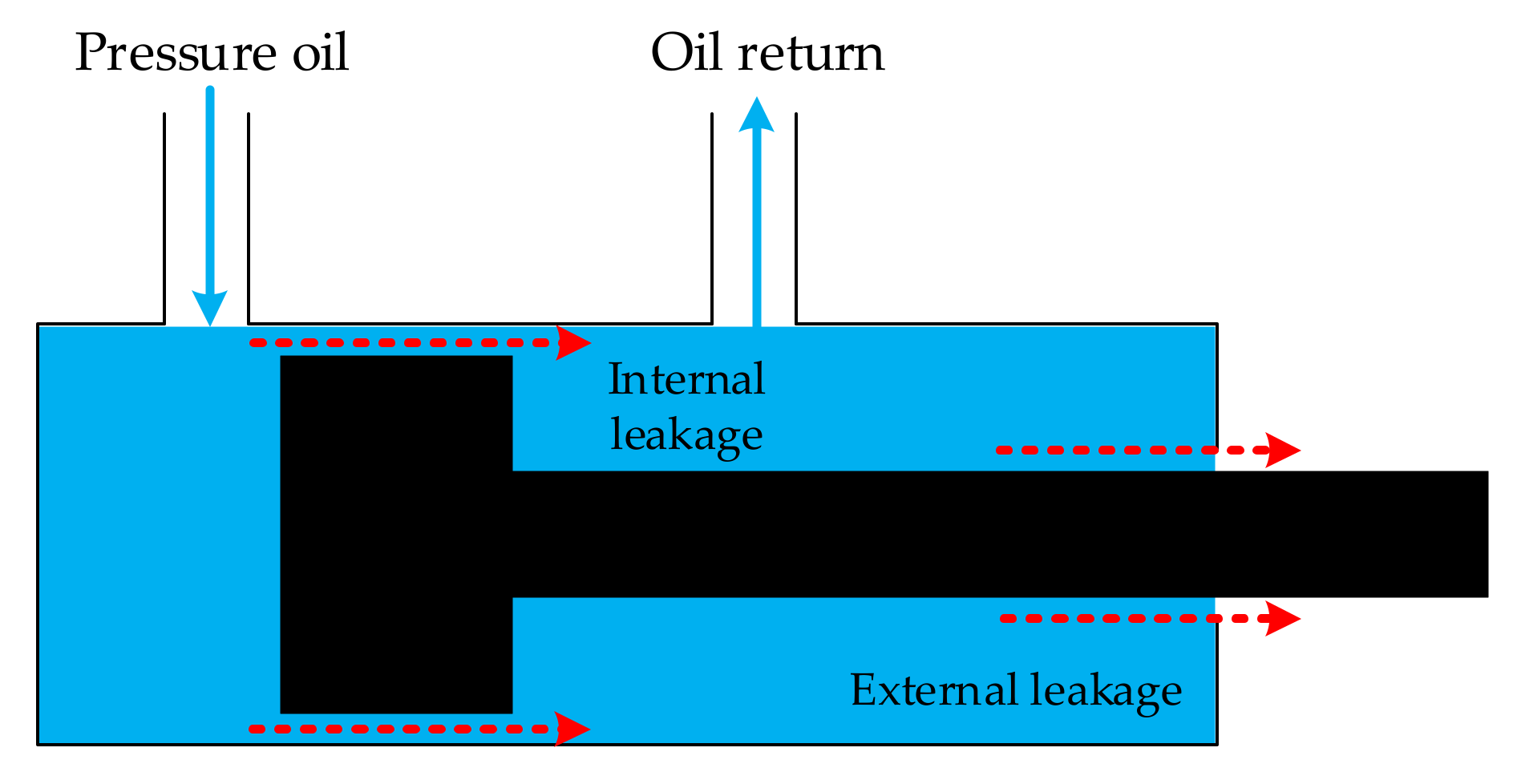
Considering there is no such thing as an absolutely perfect system without degradation, fault-free modeling of the system accounts for leaky fluid resistances, stuck fluid resistances, etc. To simulate and inject faults, only the pertinent resistive element parameters need to be altered.
Minor, general, serious, and deadly faults can be classified based on the degree of degradation of faults, and abrupt and progressive faults based on the degree of progression of faults.
Table 3 shows that faults of types A, B, and C are studied in this study. To describe the system’s operational state, define the Boolean logic variable
:
For example,
means that only type C fault exist and no type A and B.
Table 3.
Fault type and corresponding parameters.
Table 3.
Fault type and corresponding parameters.
| Fault Type Number | Components Involved | Meaning |
|---|
| A | | Internal leakage of actuator |
| B | | External leakage of actuator |
| C | | Landing gear selector valve stuck |
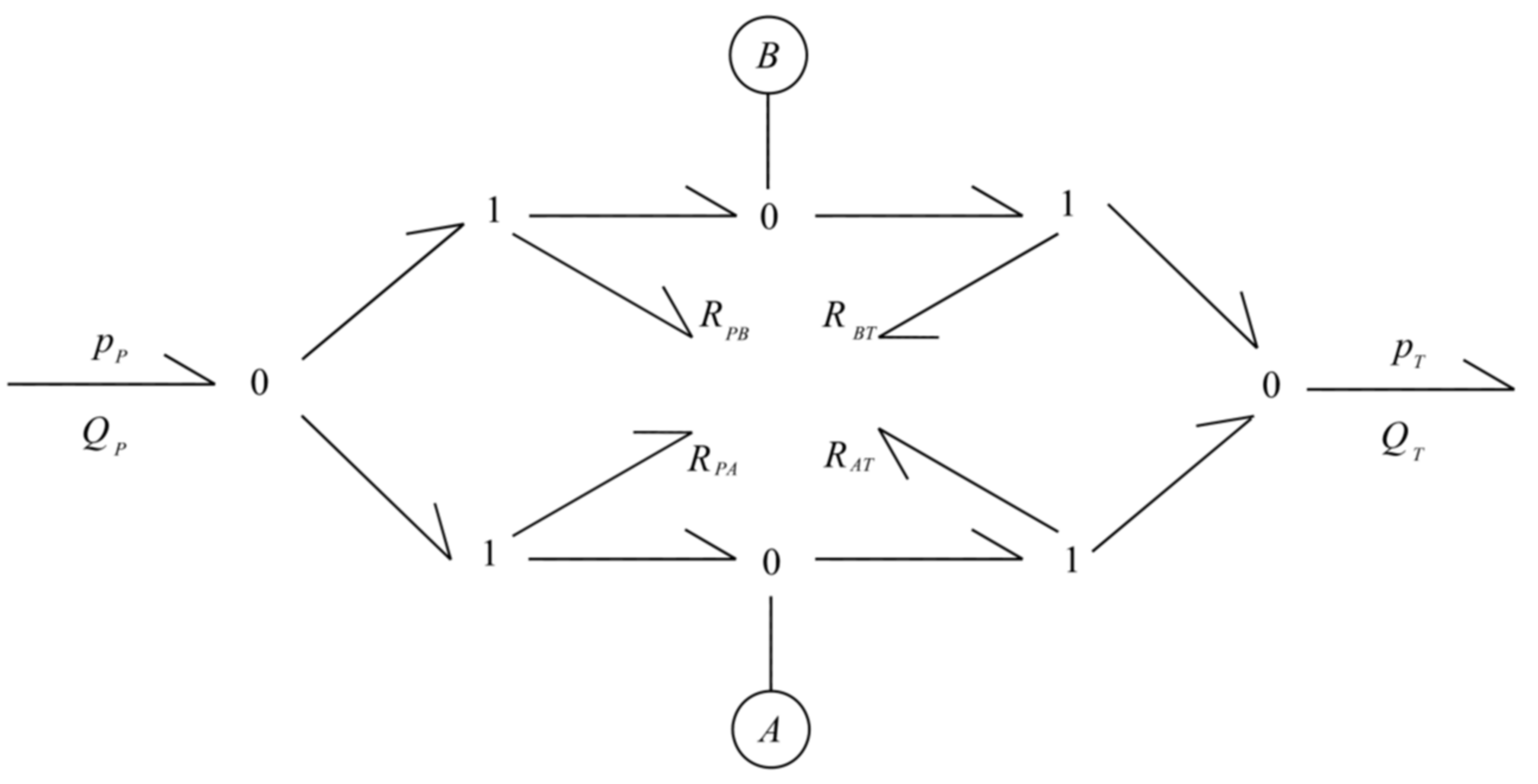
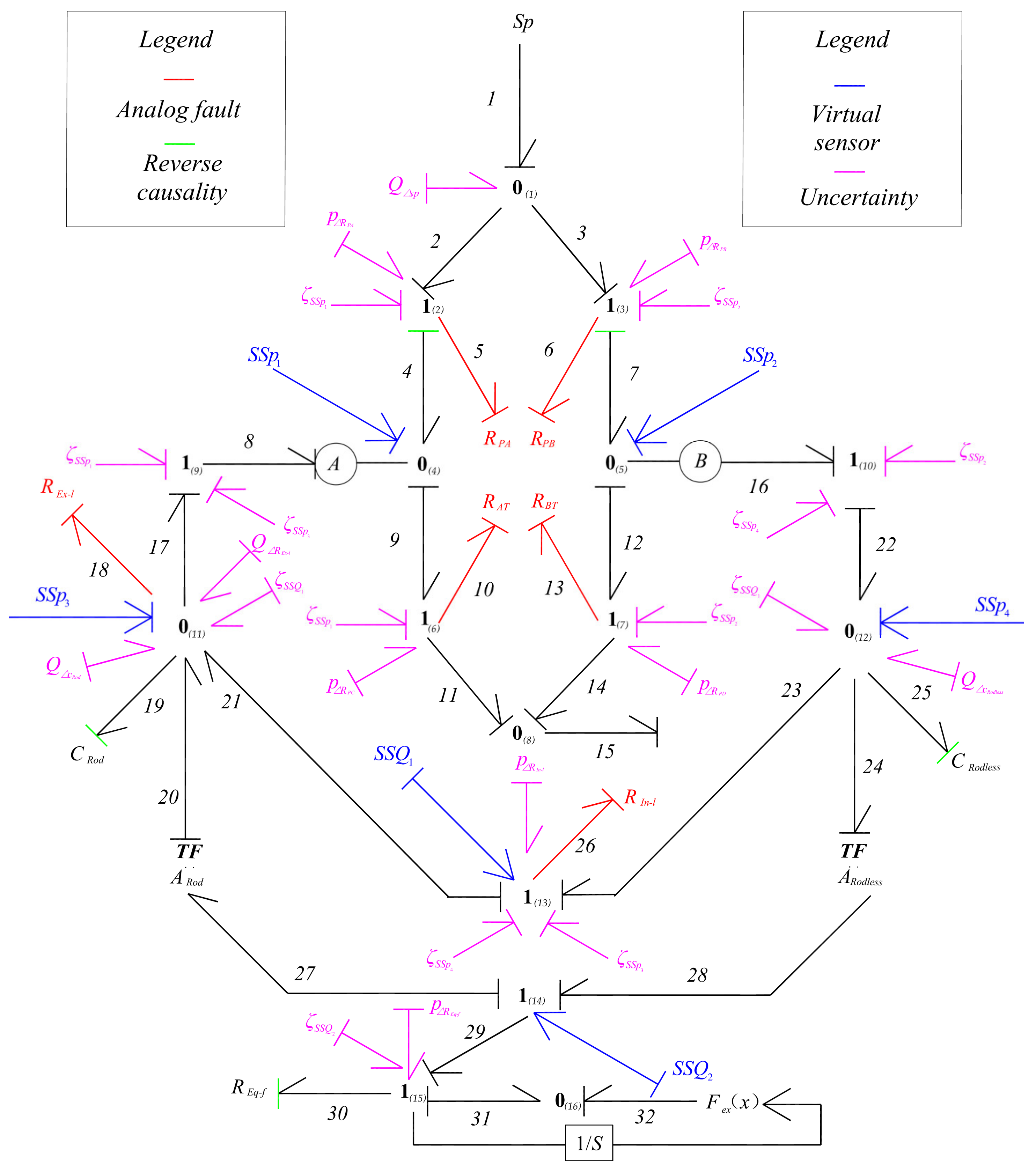
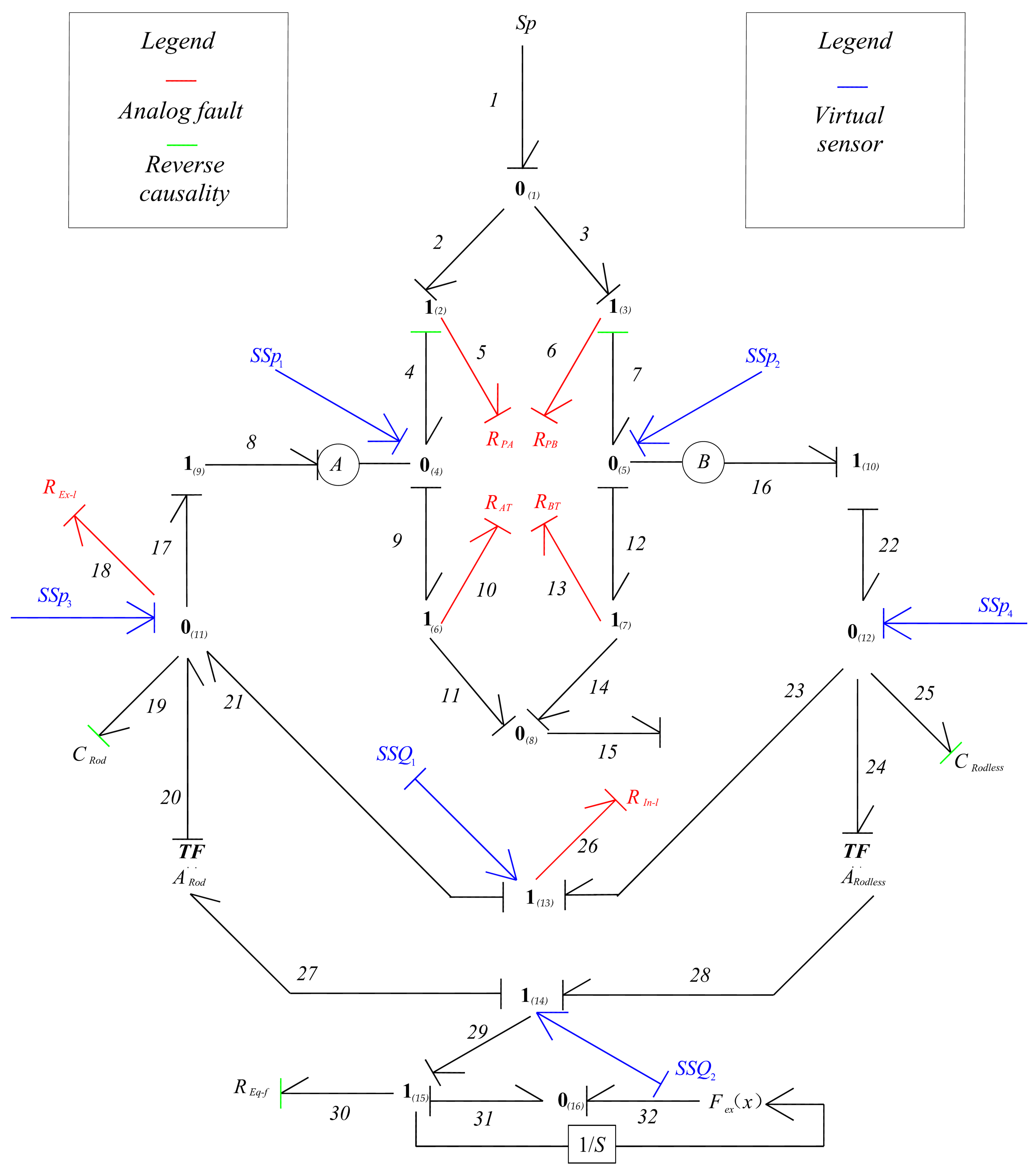
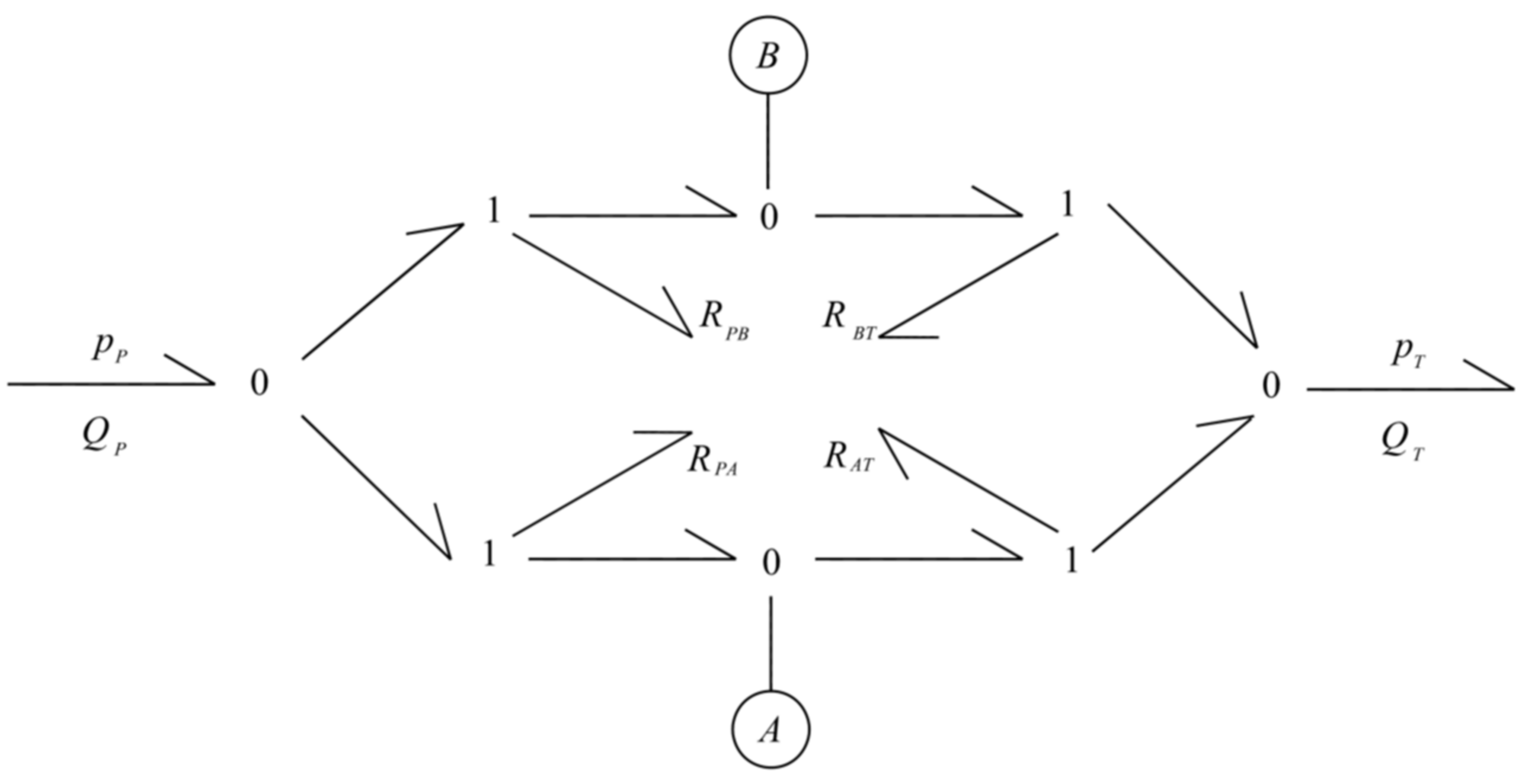
ARR at the co-potential node (0-node) can be summarized as “Same potential variable divides the flow variable”, and at the co-flow node (1-node) can be summarized as “Same flow variable divides the potential variable”:
where
is the node’s bond excluding the virtual sensor;
is the power flow coefficient, for the bond with the half-arrow pointing to the node
and for the bond with the half-arrow departing from the node
.
According to
Figure 5, analytical redundancy relations (ARRs) and residuals
are obtained.
Define the residual
, which has no dimensions of its own. In accordance with the correlation between parameters and ARRs, the fault signature matrix (FSM) is obtained. FSM is shown in
Table 4. For the elements
,
is the number of rows,
is the number of columns in the matrix, and the relationship is:
For any parameter corresponding to a lateral quantity such as
, detectability
and isolatability
are:
When a parameter in the FSM deviates from the nominal value, the detectability indicates that the fault can be detected, but not all parameters are separable. The FSM’s non-zero elements have been identified by a distinctive hue that denotes the following:
Red: residual elements in the matrix that are not 0. It means that the residual in this column contains the corresponding parameter on the left side.
Blue: detectability element that is not 0. It means that the parameters in this line have the detectability of faults.
Green: isolability element that is not 0. It means that the parameters in this line have fault isolation.
Table 4.
Fault signature matrix of landing gear R/E hydraulic system.
Table 4.
Fault signature matrix of landing gear R/E hydraulic system.
| Parameter | r1 | r2 | r3 | r4 | Db | Ib |
|---|
| 1 | 1 | 0 | 0 | 1 | 0 |
| 1 | 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 1 | 0 | 1 | 1 |
| 1 | 0 | 0 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 | 1 | 0 |
| 1 | 0 | 0 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 | 1 | 0 |
| 1 | 1 | 0 | 0 | 1 | 0 |
| 1 | 0 | 0 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 | 1 | 0 |
| 1 | 0 | 0 | 1 | 1 | 1 |
| 0 | 1 | 0 | 1 | 1 | 1 |
| 0 | 0 | 0 | 1 | 1 | 0 |
| 0 | 0 | 0 | 1 | 1 | 0 |
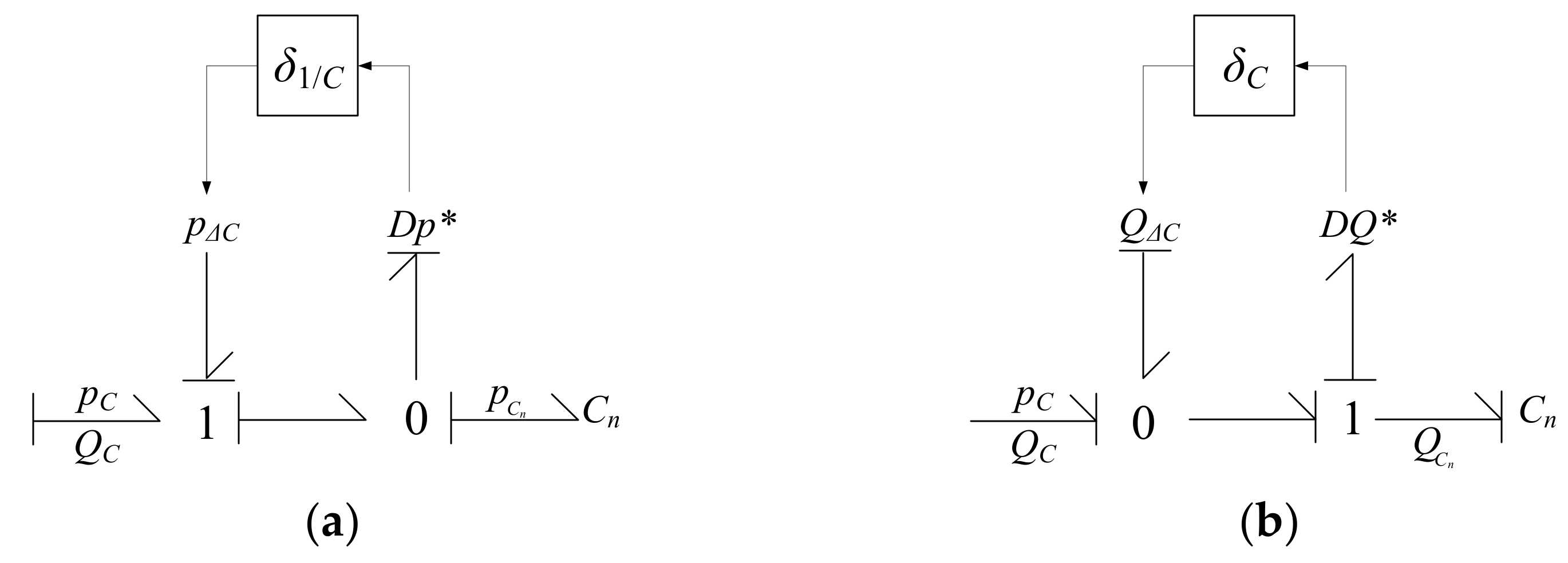
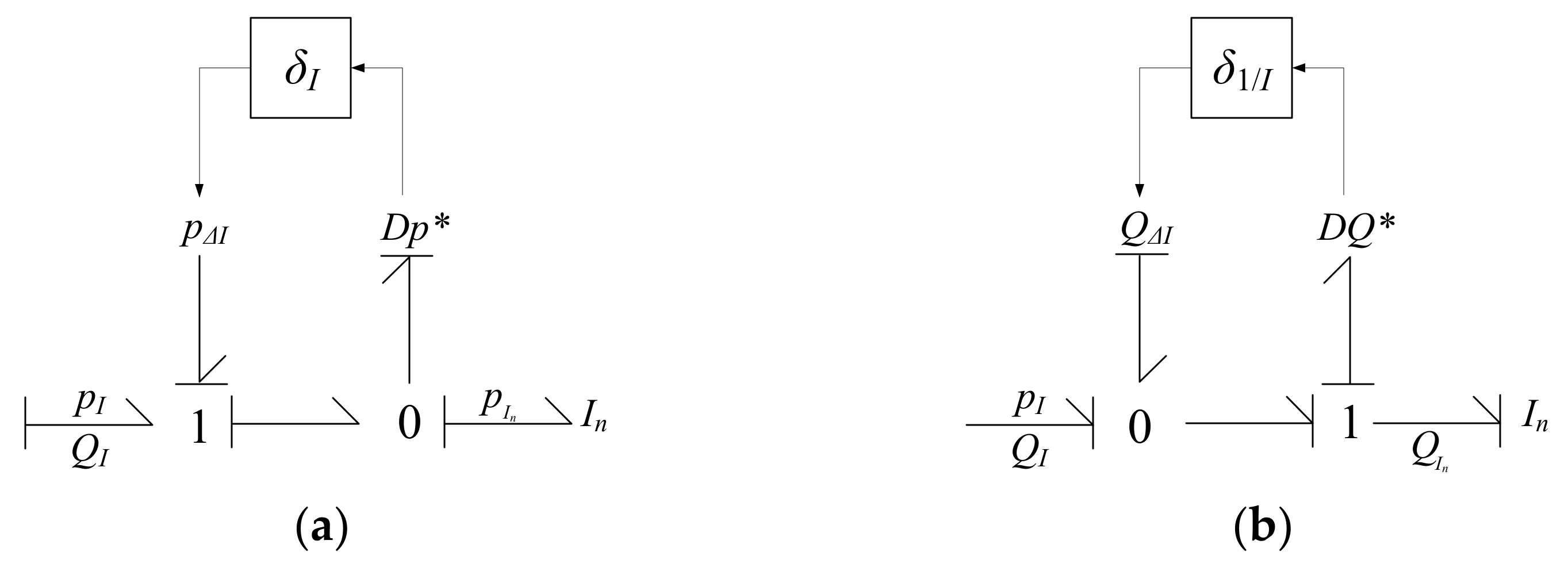
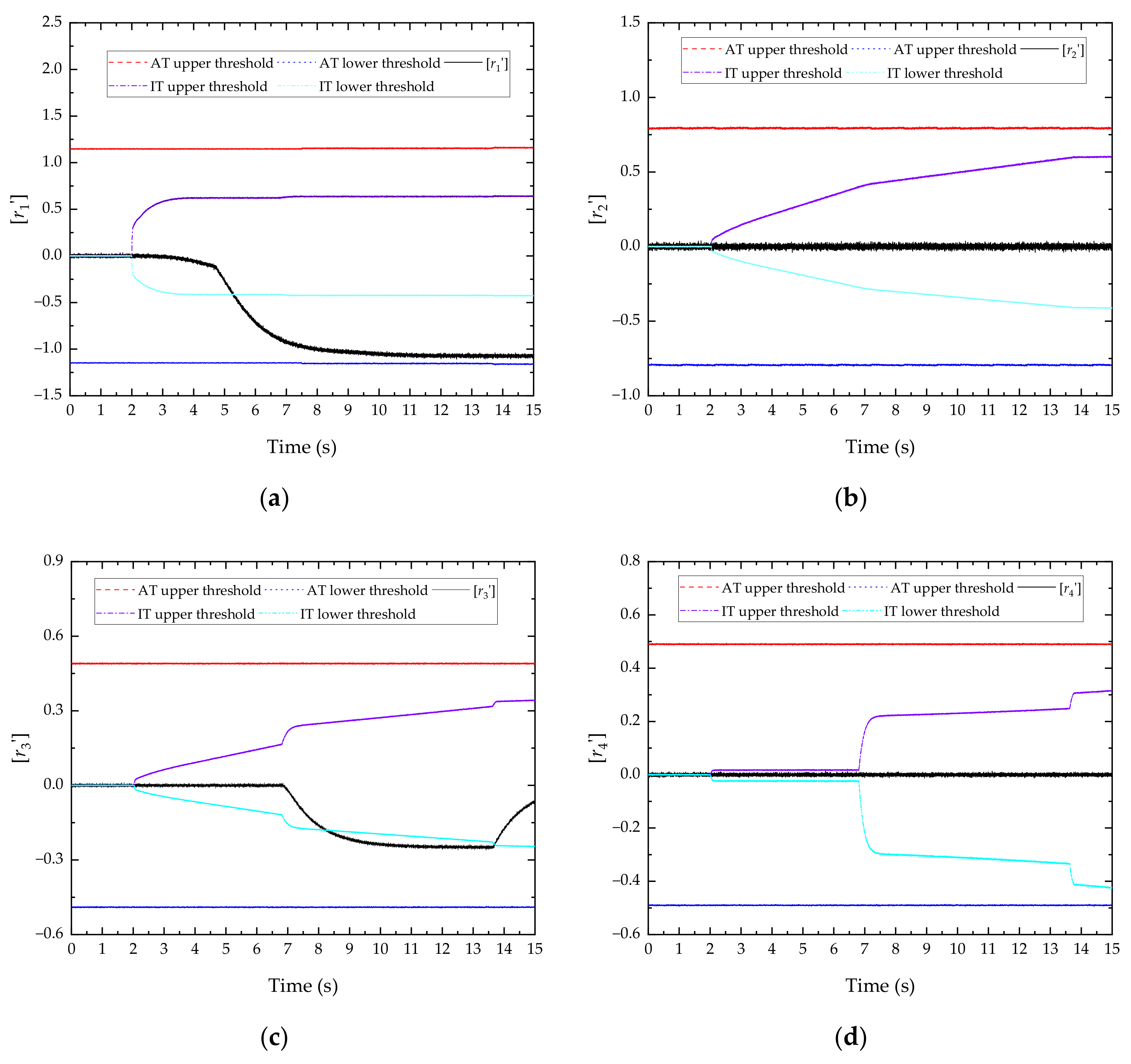
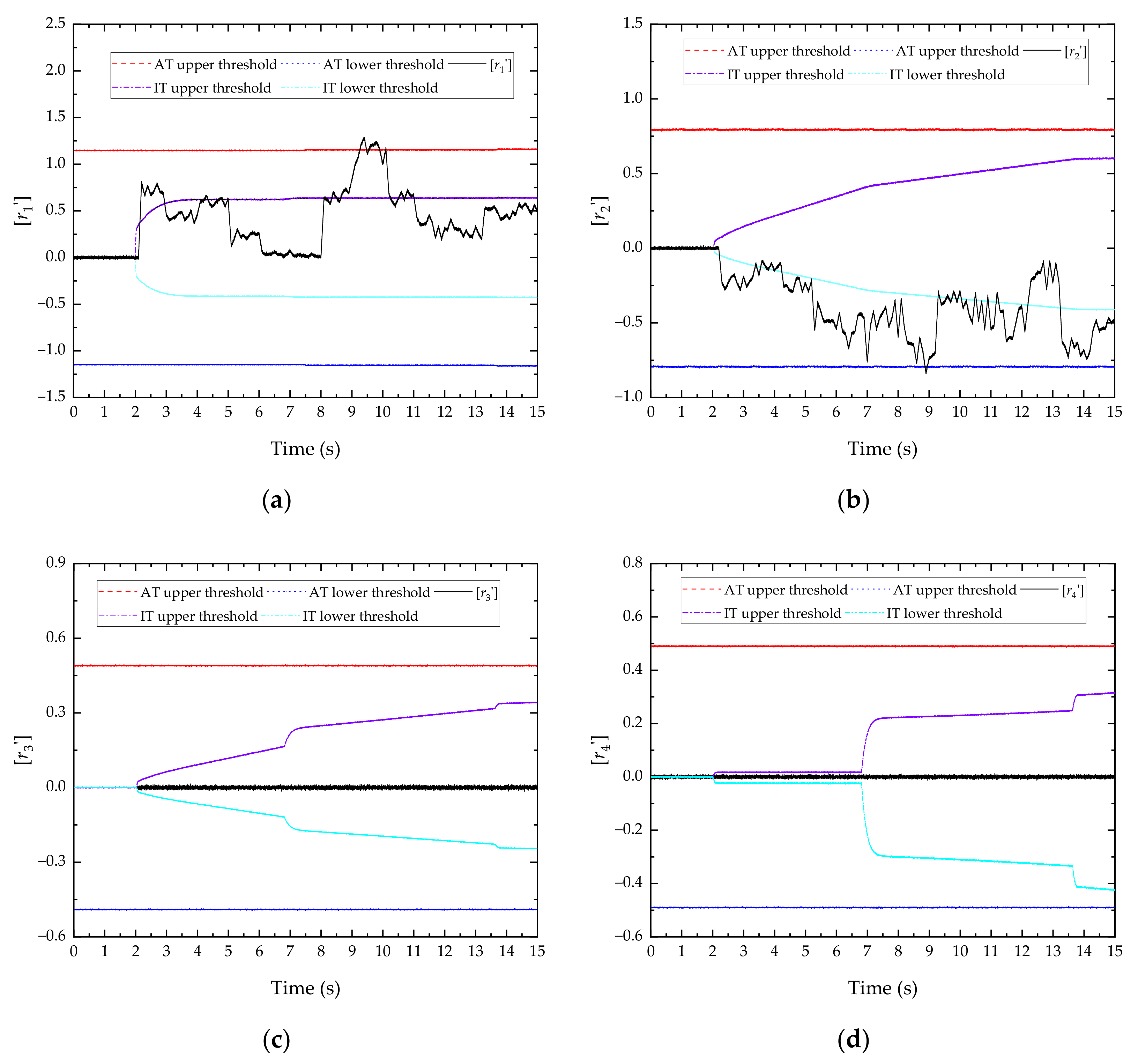
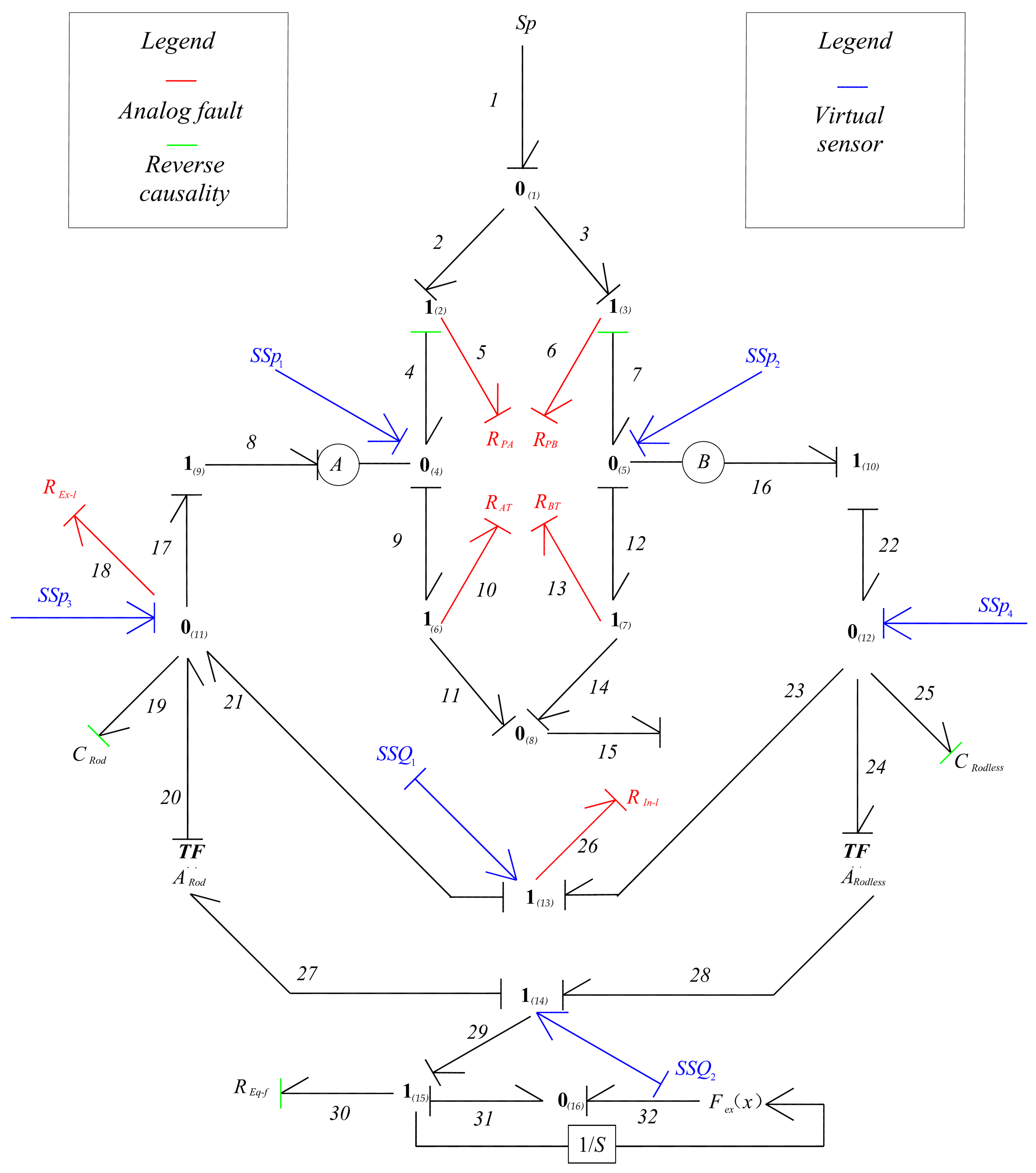
4.2. Interval Analytical Redundancy Relations Method
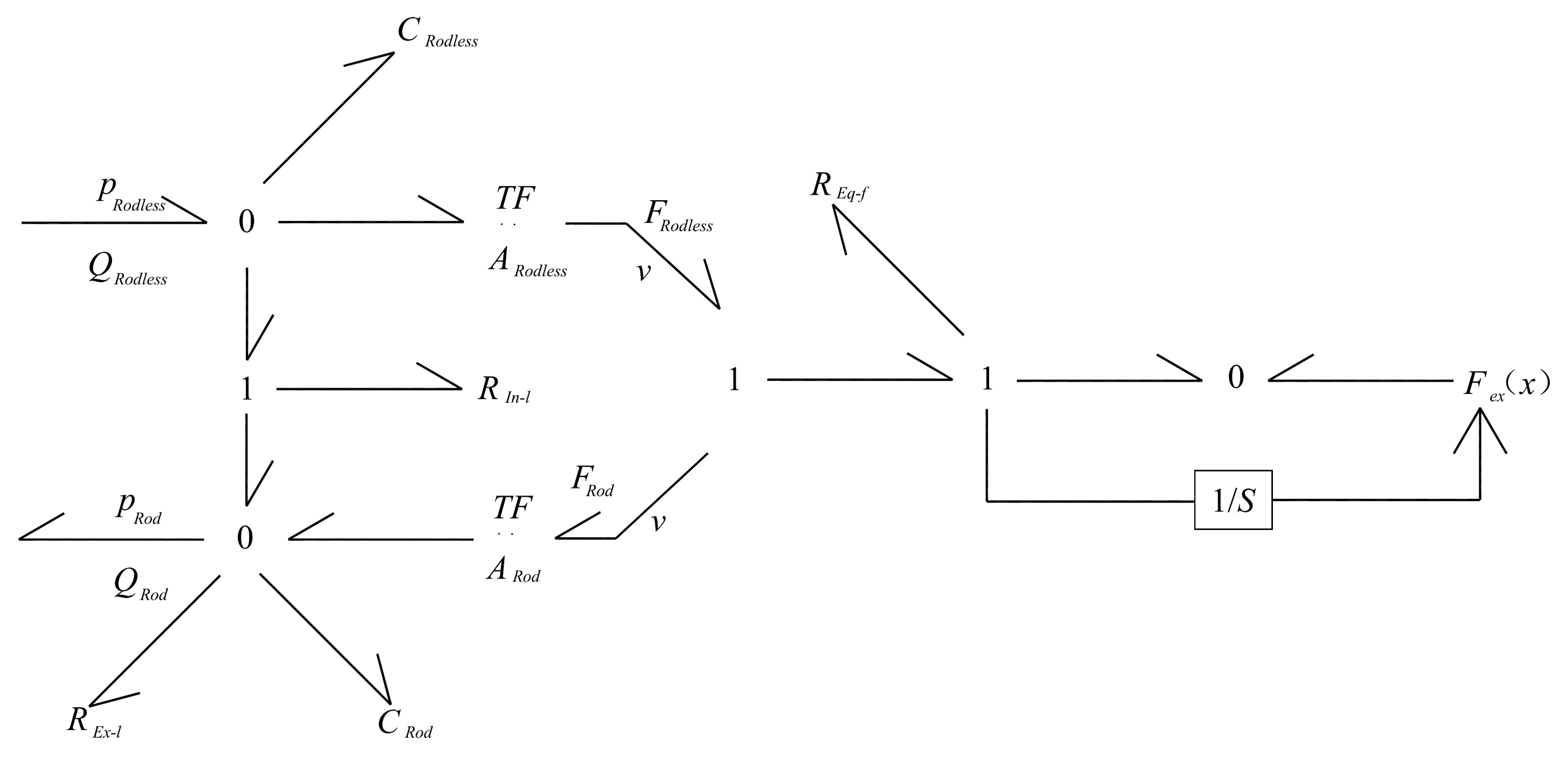
Based on the traditional analytical redundancy relation method, the interval analytical redundancy relation method in
Section 3 is introduced. According to
Figure 13, the residual derivation under the interval analytical redundancy relations is performed.
Taking residual
as an example, the new residual
after considering the negative effects of various uncertainties of the system is
wherein
is the corresponding of the parameter, and
is the uncertainty of the measured value of the sensor.
After considering the interval analytic redundancy method, becomes .
, , can be obtained according to the same method:
See
Table 5 for interval values in Equations (37) and (38).
There are differential terms
and
in Equations (37) and (38), respectively. It is necessary to further calculate the first-order differential and the second-order differential by the backward differential method.
Therefore, the uncertainty terms , , , corresponding to , , , can be obtained.
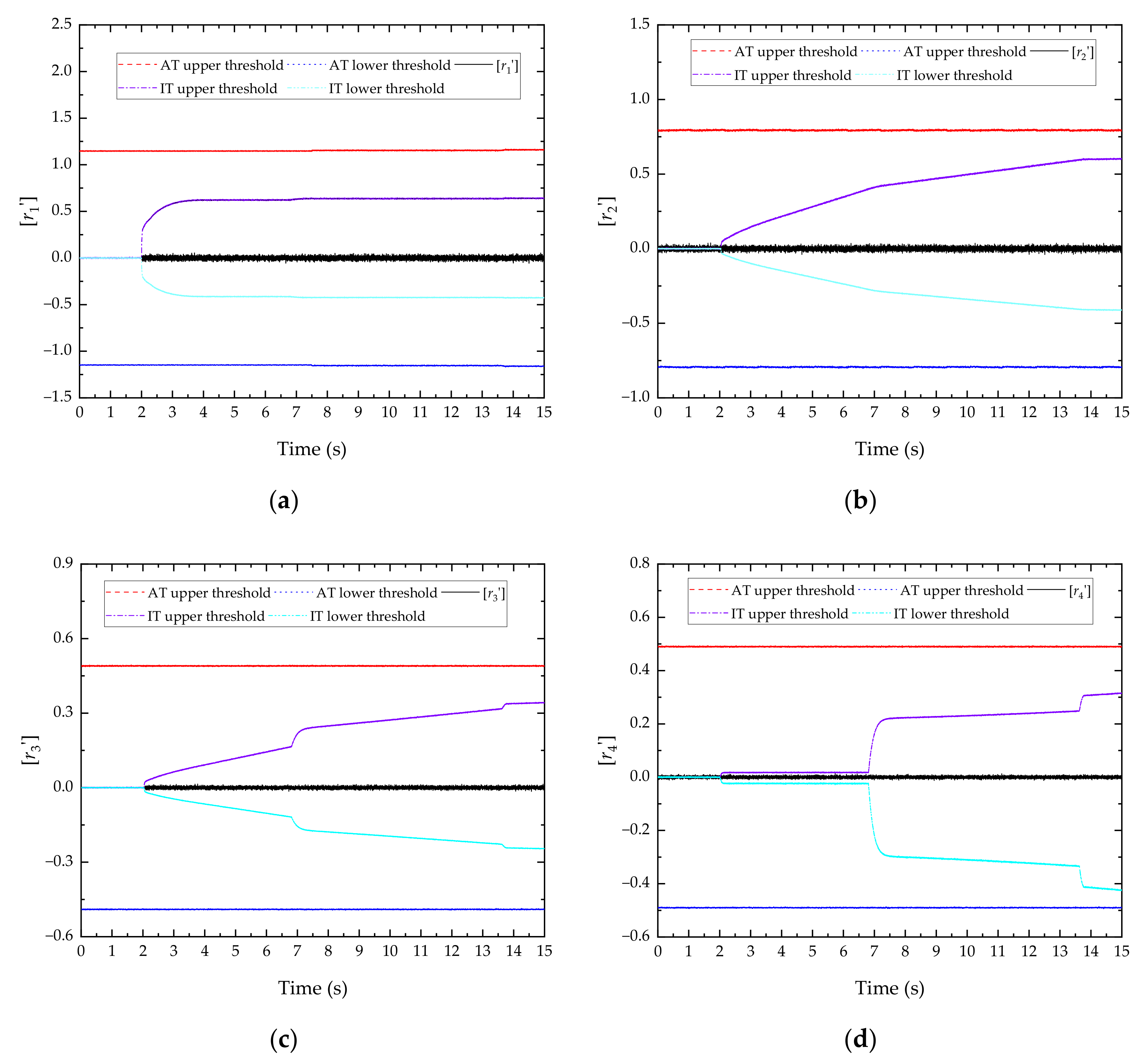
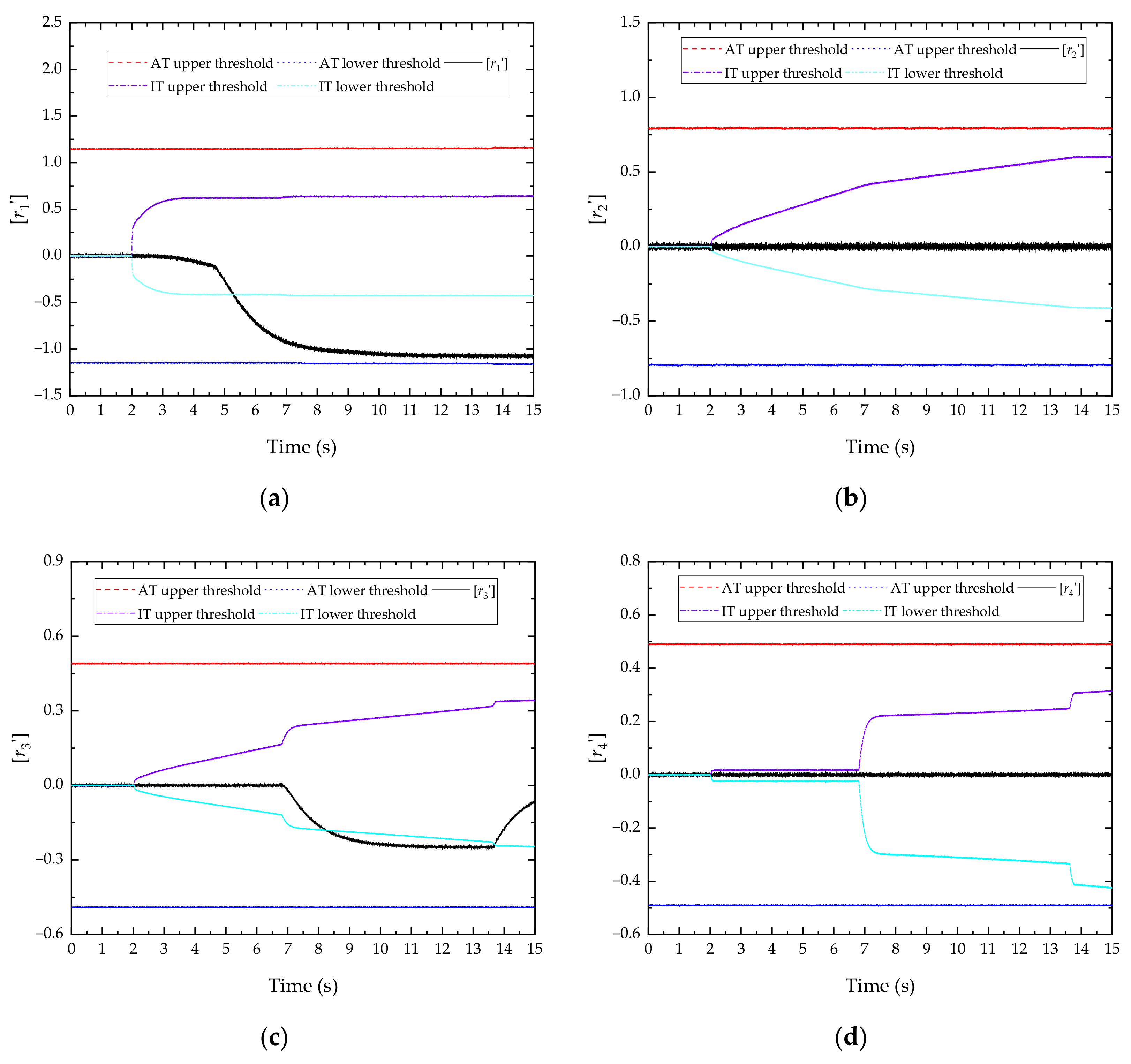
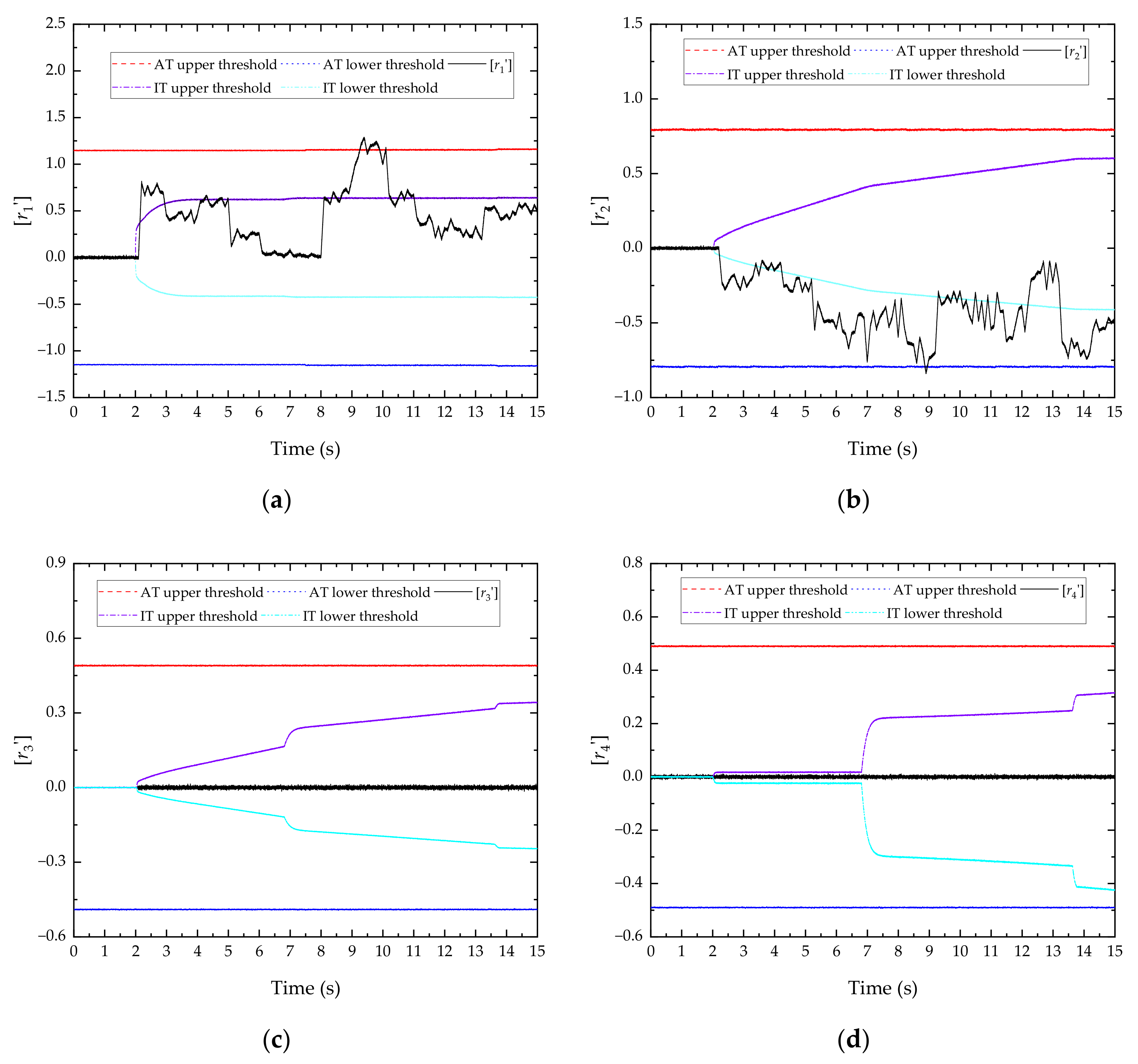
4.3. Diagnostic Thresholds and Data Acquisition
Positive, negative, or 0 residuals are possible. They have no dimensions and no physical significance. According to the literature [
43,
44], threshold deviation is defined as
, and the absolute value type threshold is:
After considering the negative factors such as uncertainty
, the absolute value type diagnostic threshold is:
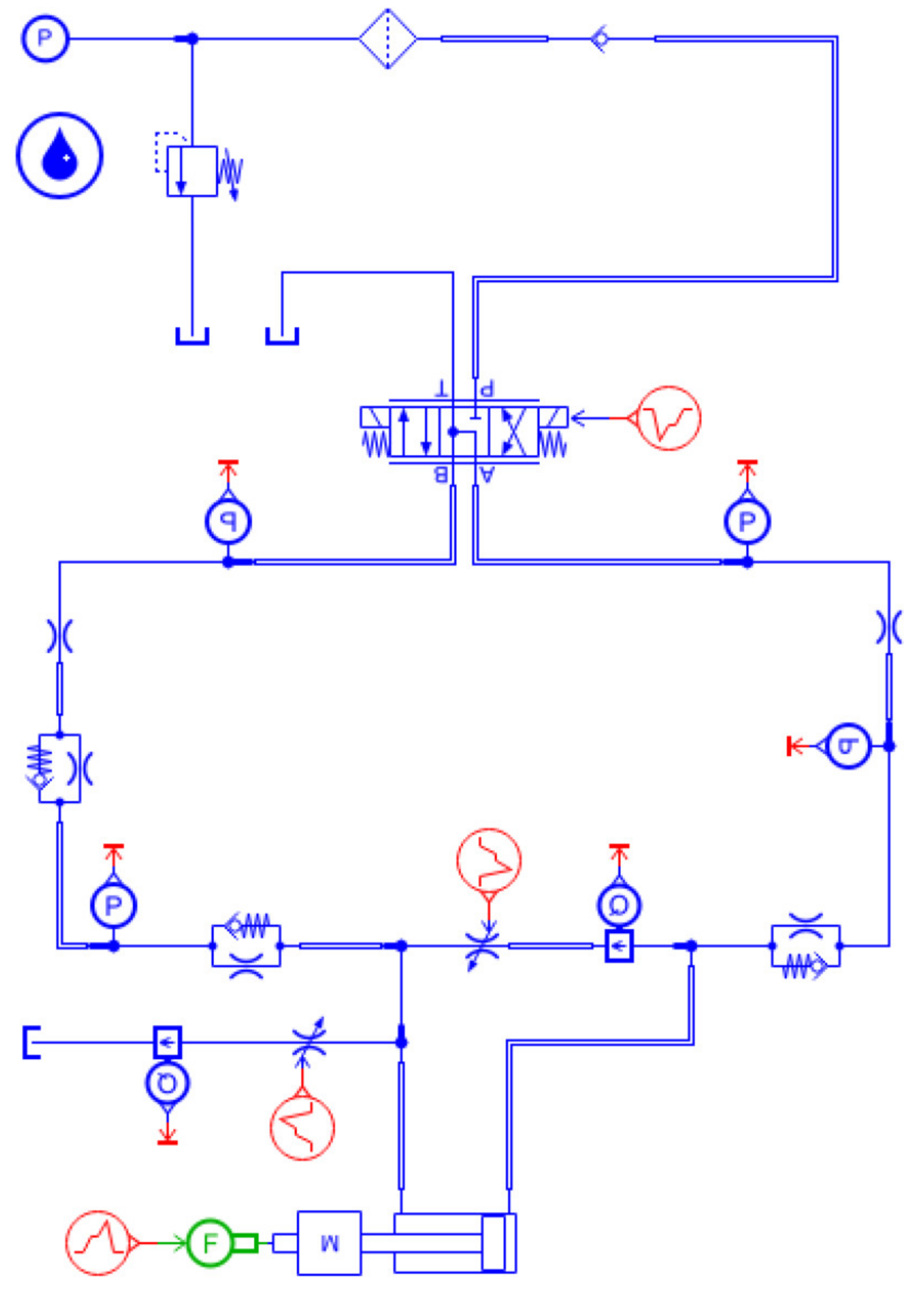
Table 6 shows the defined uncertainty value, which is 1% of the original value. In addition, the measurement uncertainty error is defined as 0.1%. According to
Figure 13, as illustrated in
Figure 14, the diagnostic simulation model is created in the LMS Imagine. Lab AMESim simulation platform. It is the same sensor that is shown on the diagnostic bond graph.
The premise of the model-based simulation experiment is to prove the validity of the model. According to the professional maintenance manuals of Boeing and Airbus [
45,
46,
47], as well as the computer-based training videos of maintenance professionals, under normal circumstances, the retraction time of landing gear is 7.5 s and the extension time is 10 s, which may vary slightly with different aircraft types. Technical manuals stipulate that actuation times cannot be changed more than 1 s. Actuator action is opposite to landing gear body action. When the retraction/extension actuator is extended, the landing gear retracts; when the actuator is retracted, the landing gear is retracted. The results of the diagnostic simulation model are shown in
Figure 15. The retraction time of the actuator is from 2 s to 12.86 s, and the extension time of the actuator is from 2 s to 9.17 s.
As shown in
Figure 15, the error bar sampling interval between the simulation effect curve and the absolute ideal curve is 0.001 s. Introducing [
48] sum of squares of errors (SSE), mean-squared error (MSE), and model effect evaluation index
:
where
and
are the ideal value sampling points represented by the red curve and the simulation effect value sampling points represented by the black curve in
Figure 15, respectively. MSE represents the error that cannot be explained by the model, so the larger the MSE, the worse the matching effect of the model. According to this principle, the larger
is, the better the matching effect of the model. The value of
can only be 0~1. Generally, if
is lower than 0.5, the model will have poor effect. If
is greater than 0.75, the model will perform well. In
Figure 15a and b, the average
is 0.7676, so the model matching is satisfactory.
6. Conclusions
Landing gear retraction/extension hydraulic system is a nonlinear dynamic system. In the research of fault diagnosis, it is unavoidable to consider the interference factors such as component parameter uncertainty and sensor measurement uncertainty. The advantage of the method proposed in this paper, which combines the linear fractional transformation technology of bond graphs and the interval analysis redundancy relations, is that it can effectively avoid or reduce the missed diagnosis and misdiagnosis caused by such interference factors. At the same time, through example analysis, the interval threshold obtained in this paper has higher detection accuracy and sensitivity than the traditional absolute threshold.
However, the limitation of this study is that it only stays at the level of fault detection, and there is less research on fault isolation after detection, that is, how to determine the type and location of faults after detection needs further research.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}