1. Introduction
A fault is a discrepancy between the actual and expected value of a parameter. Fault tolerance refers to a system’s capacity to continue operating under malfunctioning conditions [
1]. Any real-world system can develop faults, lowering the system’s dependability and performance [
2]. Fault-Tolerant Control (FTC) is a technique that may be used to improve the dependability of important systems such as nuclear power plants and airplanes [
3]. In faulty conditions, the system’s performance can be lowered, although failure can be tolerated to some amount, provided stability is ensured. Fault-tolerant control systems are defined as systems with a high level of dependability [
2]. FTC approaches are currently being applied in important industrial processes, such as combustible fuel and gas, petrochemicals, and fertilizers, where output losses cannot be allowed, and constant system efficiency is essential [
2]. The active and the passive form are the two main types of FTC [
4]. The Active Fault-Tolerant Control System (AFTCS) is responsible for recognizing and isolating the system’s defective components. Fault Detection and Isolation (FDI) employs the observer theory, in which a plant parameter is compared to a predetermined normal value to produce a residual [
5]. If the residual is below the permissible limits, it means the machine is free of defects. If the residual exceeds the required threshold, the FDI unit reports faulty conditions. The controller is then reprogrammed to meet the current operational requirements.
Internal Combustion (IC) engines are common in the process sector and maintaining adequate Air–Fuel Ratio (AFR) control in their fuel system is vital for improved engine performance, fuel efficiency, and environmental safety. Because faults in the sensors of the AFR system cause the engine to shut down, fault tolerance is required. The fault tolerance in IC engines can be introduced with the help of analytical redundancy. The main principle of analytical redundancy is to compare real system behavior to the model [
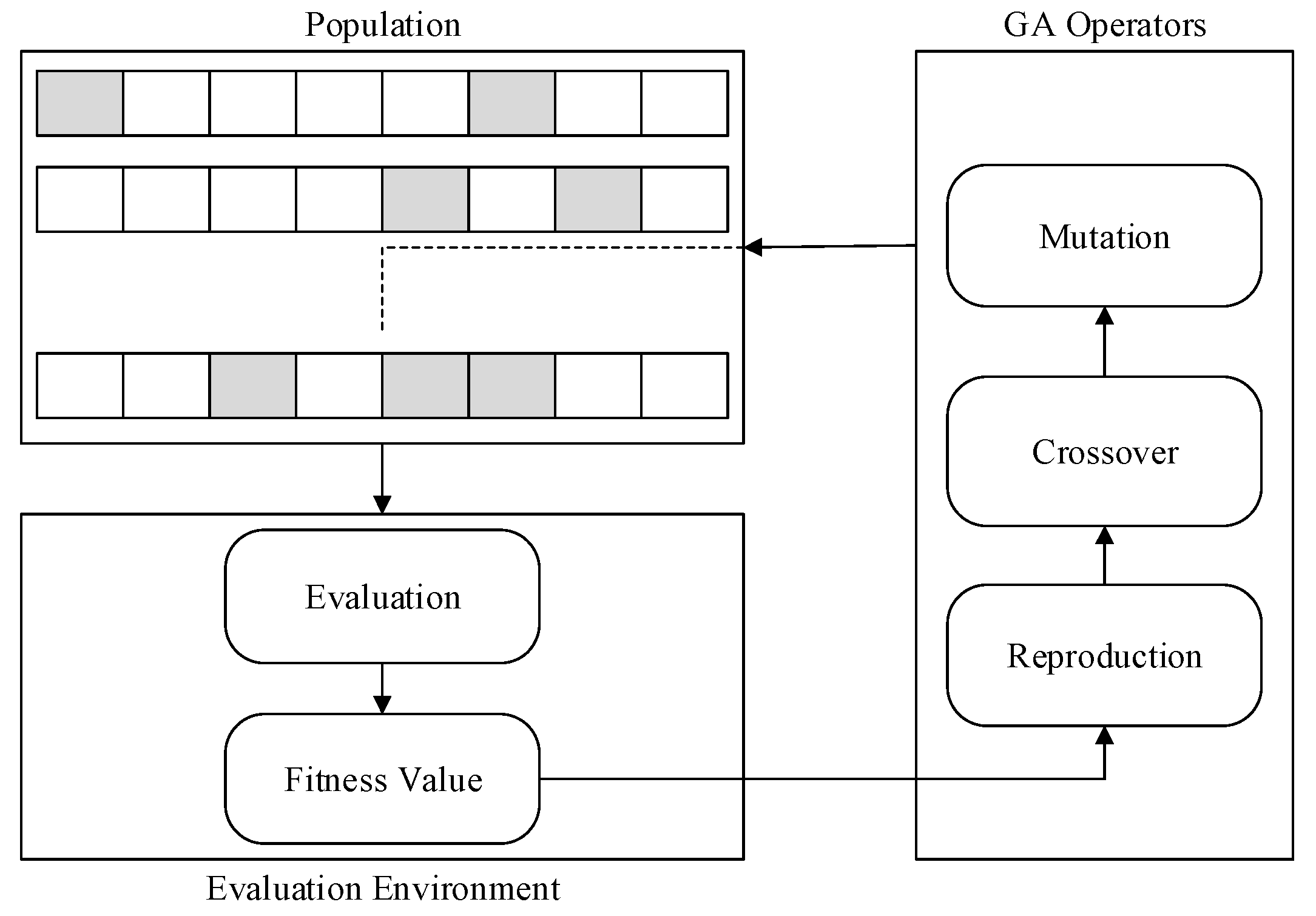
6]. The estimated sensor values can be computed by using several optimization and machine learning techniques. In this paper, we have used three techniques, namely, Genetic Algorithm (GA), Particle Swarm Optimization (PSO), and a Nonlinear Regression (NLR) model, to compute the estimated sensor values in the case of a fault. The advantages of using these techniques and the results obtained are discussed in the upcoming sections.
The rest of the paper is organized as follows: the literature review is presented in
Section 2, research methodology is presented in
Section 3, estimation techniques used are discussed in
Section 4, and the results are discussed in
Section 5, followed by a conclusion at the end.
2. Literature Review
Kalman filters, fuzzy logic, neural networks, regression, and other techniques may be used to construct an FDI unit. In the case of sensor and actuator faults coexisting, Kalman filters are used in [
7] for Fault Detection and Location (FDL) in a nonlinear model of an aeroengine. The proposed system uses hybrid Kalman filters and only detects the faults and does not estimate the sensor values in case of a fault. Another Kalman filter-based approach is proposed in [
8], where a hybrid FTCS is used to introduce analytical redundancy in an engine to maintain the Air–Fuel Ratio (AFR). An active FTC system is proposed in [
9], in which an Adaptive Interval Observer (AIO)-based FDI is used to accomplish trajectory tracking of an unmanned underwater vehicle that is susceptible to sensor failures and many uncertainties. The proposed AIO is inefficient in terms of computation power. In [
10], the FDI uses fuzzy logic to predict nonlinear functions, and adaptive control is used to correct bias and obtain faults in the actuator. The proposed system may accept inaccurate data and inputs; hence, the accuracy may be compromised. Ding and Fang [
11] suggested an FDI method that manages sporadic observations if the full measurements of data are unavailable. A linear regression-based robust AFTCS approach can be found in [
12] for the AFR control of an IC engine. In the proposed approach, the nonlinear sensor values are estimated by using linear regression; hence, the system produces less accurate results. Yu et al. [
13] investigated the output degradations caused by incipient faults and predicted the residual life in a mechatronic device in a case study. Two analytical redundancy connections were discussed; these would boost the controlled system’s separation capacity when multiple faults occurred. Reference [
14] proposes an adaptive fault-tolerant approach for synthesizing a compensation controller for uncertain nonlinear pure-feedback systems with dead-zone actuators and stochastic failures. The failure mode of the actuator is characterized by a scalar Markovian-type function, and the compensation strategy is designed using adaptive backstepping methods.
In [
15], an Artificial Neural Network (ANN)-based approach is used to estimate the sensor values in case of a fault to prevent the engine shutdown, but the critical points (on which the estimation error may be high) are excluded from the analysis. The topic of command filtering-based event-triggered adaptive fuzzy control for a class of stochastic nonlinear systems with stochastic failures and input saturation is investigated in [
16]. Fuzzy Logic Systems (FLSs) are used to approximate unknown nonlinear functions and system dynamic changes induced by stochastic errors. The command filtering design approach is used to decrease the computational overhead. The average dwell-time technique is used to examine the AFTCS problem for a class of switched nonlinear systems in [
17], in which neural networks are used to design the controller. Reference [
18] describes a fault-tolerant control approach for singular systems in the presence of multiplicative failures based on control performance. Reference [
19] discusses the design of an AFTCS for spacecraft attitude control with actuator defects, fault estimation errors, and control input limitations.
For sensor errors in air–fuel ratio management of internal combustion engines, fuzzy-logic-based AFTCS was developed in [
20] but it consisted only of an active part having computational inefficiency. In [
21], AFTCS was proposed for both sensor and actuator faults with mathematical relationship observers and redundant actuators for the anti-surge control system of centrifugal compressors. The approach suggested is less sensitive due to substantial computational cost, and undesirable transients in switching the control strategy from a regular controller to a reconfigurable controller once the problem is effectively diagnosed, which are not prevented throughout this investigation. The applications of FTC can be found in aerial vehicles such as quadcopters and hex copters as well. Fault detection and fault-tolerant control algorithms are suggested in [
22] to address the problems of both actuator defects and disturbances in a hex copter. By utilizing sliding mode and a disturbance observer with an FDI, the motor failure is separated to resolve the one or two actuator failures. In [
23], a strategy for estimating actuator faults in quadcopters operating in unknown environments is presented. An improved intermediate estimator approach, which can be used to predict actuator failures and system states, was applied to the quadcopter model to avoid the difficulty associated with solving linear matrix inequalities. A sliding mode control based on neural networks is presented in a new study for the attitude and altitude system of a quadcopter amid small perturbations [
24]. In [
25], the problem of fault-tolerant control for turbofan engines with actuator defects is addressed and solved using Convolution Neural Networks (CNN). During this study, a limited dimensionality is considered; hence, the proposed method is ineffective for the higher dimensionality of turbofan engines. Moreover, the CNN requires a large dataset to produce acceptable results, which makes it slow during the training stage.
The existing FTCS approaches along with their shortcomings are summarized in
Table 1.
We can see from the literature that most of the work on fault detection use Kalman filters, lookup tables, linear regression, machine learning, or ANN. For malfunctioning sensors, linear regression gives less accurate sensor data, while the Kalman filters and lookup-table approaches are computationally wasteful. Because gradient descent must be done several times, the ANN-based technique necessitates forward and backward propagation. Because of this, the ANN is sluggish, and the only way to increase its speed is to utilize a GPU, which is a costly option. Hence, we propose three different approaches that can be used to estimate the values for nonlinear sensors. These approaches are PSO, GA, and NLR, which can be used to design an AFTCS for highly nonlinear sensors of an IC engine for AFR system control.
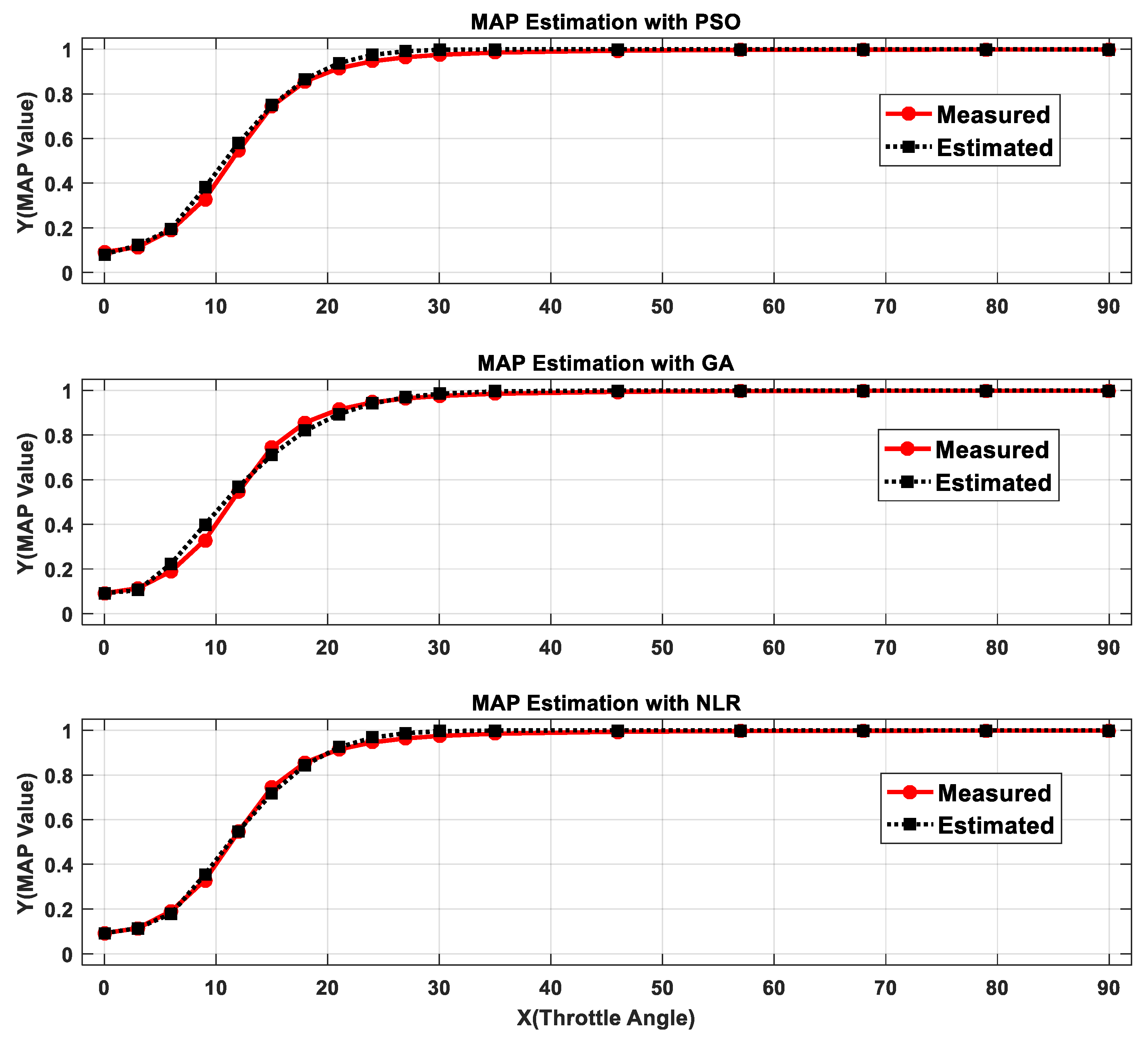
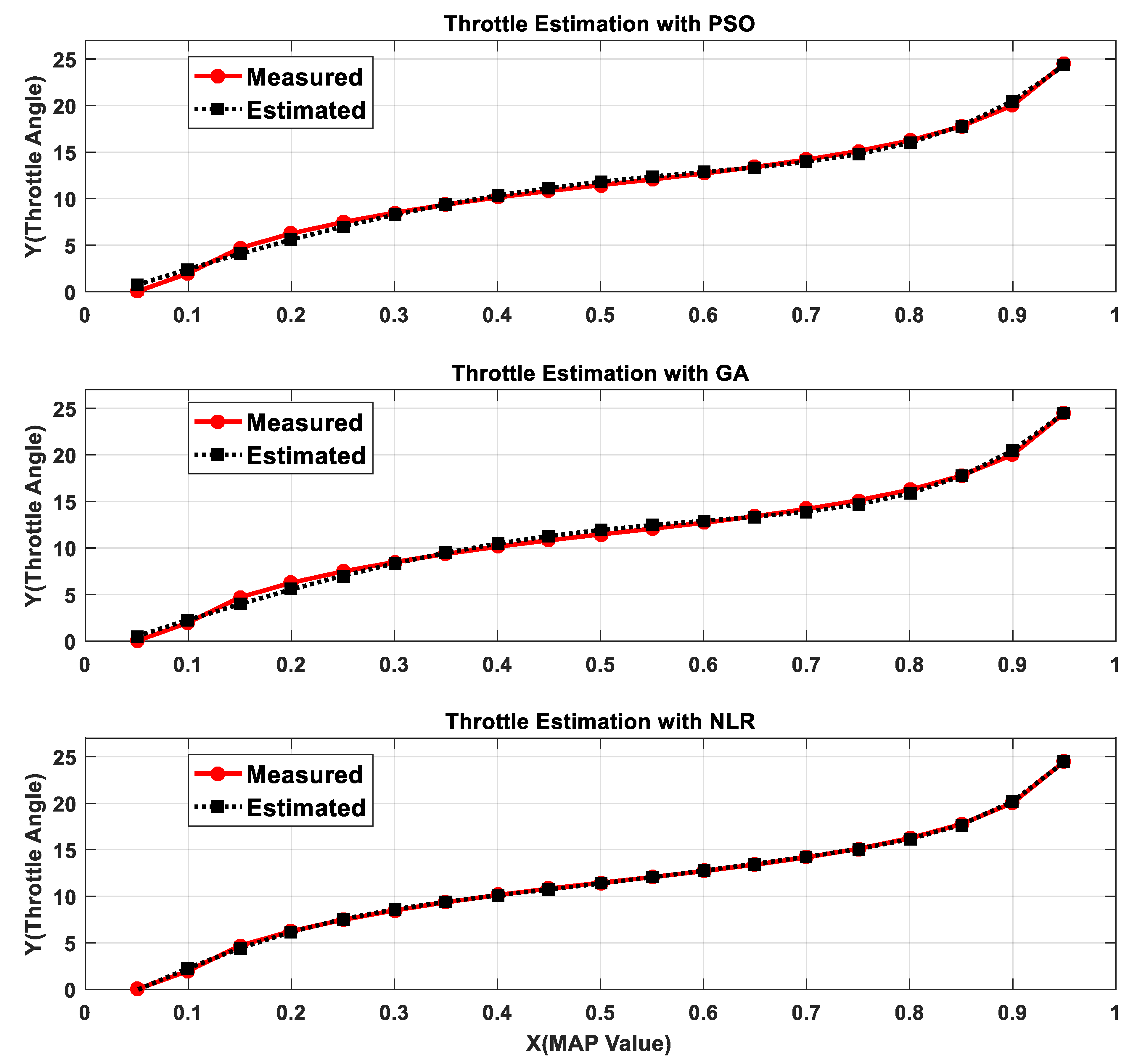
During this work, the main contribution is the implementation of three estimation techniques for nonlinear sensors, given the constraint that we have a minimum dataset for the prediction of sensor values in case of a fault. The proposed techniques are implemented in such a way that the controller needs much less computational power and computational time to generate the estimated values. Finally, the performance analysis in terms of accuracy and computational power requirements is carried out to prove the superior performance of the proposed techniques. The simulations are carried out by considering an engine speed of 300 r/min, which is the implementation speed of the MATLAB model. The simulation results show the superior performance of NLR over PSO and GA and prove the superior fault tolerance performance, especially for the Manifold Absolute Pressure (MAP) sensor in terms of less oscillatory response, compared to that reported in existing literature.
3. Research Methodology
The suggested AFTCS was developed in MATLAB/Simulink using the experimentally proven AFR model [
26] of the IC gasoline engine. The results of refining this model to fit the right AFTCS design for a GA, PSO, and NLR-based FDI unit have been reported. The Fault Injection Unit (FIU) sends a fault instruction to each sensor one at a time, while the additional sensors stay normal. The engine speed is set to 300 r/min for this work based on the MATLAB model’s design speed, and the FDI unit provides the same value to the controller when the speed sensor fails. The MATLAB model lookup tables [
27] are used to extract the data for MAP and throttle sensors at 300 r/min. GA, PSO, and NLR techniques are used to create nonlinear relationships between MAP and throttle using the supplied data. These nonlinear relationships are then used by the FDI unit to estimate the values of the faulty sensors.
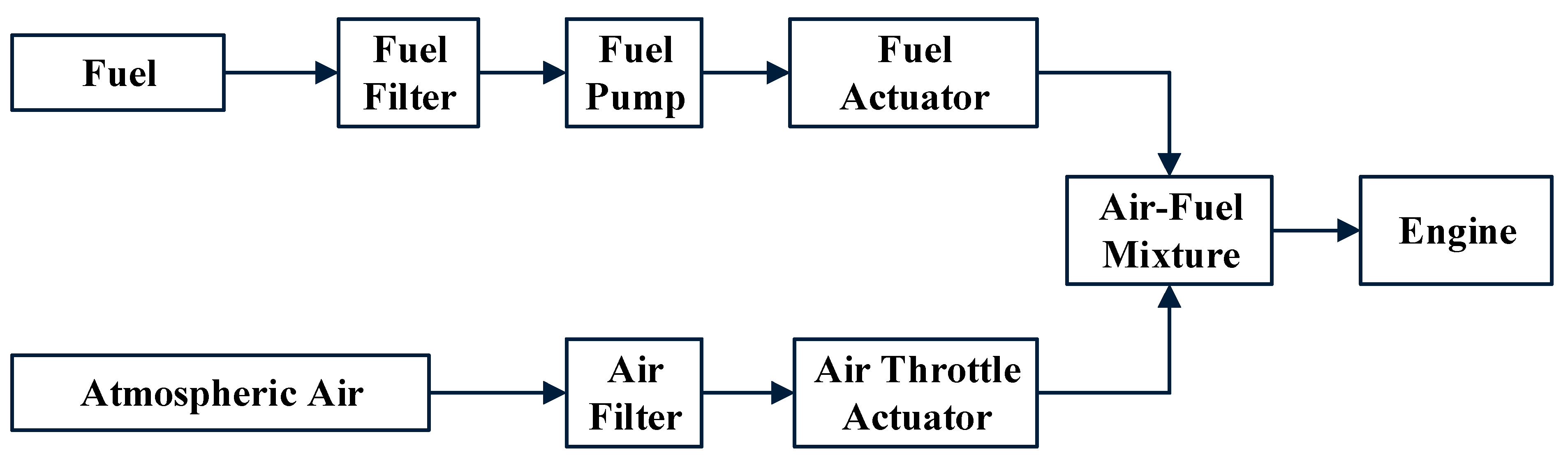
3.1. Air–Fuel Ratio (AFR) Control
An Internal Combustion (IC) engine is a heat engine that uses air to burn fuel in a combustion chamber. In industrial operations, IC engines are commonly utilized as prime movers. Chemical energy is turned into mechanical rotation, which is then used to power the engines’ compressors and alternators. The two types of IC engines are Spark Ignition (SI) and Compression–Ignition (CI). The compression causes combustion in CI engines, whereas spark plugs cause combustion in SI engines. During the combustion phase, the AFR is a measurement of how often air and fuel are mixed in a specified ratio. It is required for better engine performance, reduced fuel consumption, and less pollution. The general architecture of the AFR of an SI IC engine is shown in
Figure 1.
The mathematical equation of AFR is:
The chemical equation is given as:
The AFR is referred to as the stoichiometric ratio in this equation, and its value for gasoline is 14.6:1. During the combustion of fuel, the AFR ranges from 6:1 to 20:1. A rich mixture has a lower value than the stoichiometric ratio, whereas a lean mixture has a higher value than this ratio. The 16.5:1 AFR, for example, is lean, while the 13.7:1 AFR is rich in gasoline. Rich and lean mixtures are also deemed dangerous to the engine because they weaken the catalyst while also lowering engine performance and fuel economy. The value of AFR varies depending on the type of petrol. The value for ethanol amounts to 9:1, methanol to 6.47:1, and hydrogen to 34.3:1. Four sensors are important in preserving AFR control of the SI IC engines:
Manifold Absolute Pressure (MAP) Sensor: It gives the controller a precise suction air pressure rating.
Throttle Sensor: It provides the controller with an air throttle position.
Exhaust Gas Oxygen (EGO) Sensor: It is used to assess the oxygen substance in the drained gas and manages the fuel supply to ensure efficient ignition.
Speed Sensor: Measures the rotational speed of the crankshaft of an engine; to provide this speed to the controller, a speed sensor is used.
Because when these sensors fail, the engine shuts down, hence fault tolerance is required. It is desirable to generate virtual redundant sensors in the FDI unit that have a nonlinear response similar to actual sensors. That is why we used the estimation techniques (GA, PSO, and NLR) in AFTCS architecture to approximate the system.
3.2. System Modeling
The AFR control can be categorized in a variety of dynamic ranges, such as air dynamics, fuel dynamics, sensor model, and controller design [
28]. Here, the formulation for each dynamic is given.
3.2.1. Air Dynamics
Using the ideal air–gas hypothesis and mass conservation theory, the air intake dynamics are characterized as follows:
In the above equations, is the temperature at the input, is manifold pressure, and is the volume at the input; are used to indicate the mass flow through the valve and into the cylinder, respectively; R represents the gas constant; the engine speed is denoted by , and throttle opening position is represented by . The intake temperature’s derivative concerning time is meant to be zero.
Now, Equation (4) becomes:
The volume of air passing through the valve is [
29]:
where
is the coefficient of discharge.
indicates the overhead load pressure. The load ratio
then can be defined as
.
is the opening area of throttle and can be given as:
Here,
is a nonlinear quantity and is given as:
Here, γ is the air heat ratio and its value is 1.4.
3.2.2. Fuel Dynamics
The fuel dynamics can be found in [
30] and reported as:
where
represents the fuel vapor process at some fixed amount of time indicated by
;
represents the fuel flow injection
; the flow of fuel in the cylinders is given by
;
the vapor fuel flow
; and
the liquid mass fuel flow
. To produce a more comprehensive model, it is possible to add
as a vector dependent on the throttle opening or engine r/min
[
31]. In our case, the second solution is more feasible:
where
,
,
are constant parameters. The injector model is given by a linear relationship between the mass fuel flows from the injectors. The AFR now becomes:
3.2.3. Sensor Model
The expression of the lambda (
λ) sensor model can be formed as:
Here, τλ is the fixed time delay and its value is 0.1 s.
The speed of the engine
and time delay
are related as follows:
3.2.4. State-Space Representation
To obtain the state-space model, the following equation can be used:
with
,
, and
:
confined as follows:
, for
.
3.2.5. Controller Design
To formulate the architecture of the observer, Wang et al. have provided the mathematical model in [
32]. We are using the same model to explain the observer’s design.
where “
x” represents the state vector, “
u” represents the input vector, and “
y” represents the output vector. The system matrices are
A,
B,
C, and
D.
In (27),
L is the feedback gain.
FDI does not declare any fault when “
” goes to zero. If “
” is out of bound, an error is identified, and the faulty value will be replaced. The complex structure of AFTCS, and its slow response time due to excessive computations, are two of its main drawbacks [
33].
The nonlinear observer design equation we obtain from (27) follows:
where “
g(
x,
u,
t)” is a nonlinear function and assumed to be globally Lipschitz.
is the gain for the nonlinear observer.
Let
be the error vector:
From Equations (33) and (34), we obtain:
Lemma 1. The error asymptotically approaches 0 if we can obtain a matrix R, X, and scalar µ such that andin order to meet the linear matrix inequality (LMI): The reliability of each sensor is denoted by R.
The following equation can be used to select the observer gain matrix:
We can validate the choice of observer gain matrix by evaluating the following Lyapunov function and proving its derivative to be zero:
Next, we need to check
, as listed below:
Substituting (38) in (39), we obtain:
If the inequality is given in (40) exits,
asymptotically approaches 0.
This inequality becomes equal to (41) by applying the Schur complement, which completes the proof.
Theorem 1. The errorapproaches to zero exponentially with rateif there exist matrices R, X, and scalars,such that to satisfy the following:
To prove this, consider (40) and (42), which give
From (38) we obtain
where
are the minimum and maximum eigenvalues of
R, respectively. Hence, we obtain the following norm:
Coming back to the residual equation:
Finally, we can find the following criteria for fault detection of a sensor fault:
Figure 2 depicts the planned AFTCS and its activity. When the system first begins, it tests the sensor values and calculates the sensor-to-observer value threshold
.
The FDI detects the fault by calculating the residual and comparing it with the threshold (ξ) as follows:
If , no fault is present in the sensor.
If , a fault is detected in the sensor and will be replaced by the observer output.
If there is no fault, the engine performs as anticipated. The error signal, on the other hand, becomes out of the threshold (10% absolute) if any single sensor fails. The FDI unit feeds the Engine Control Unit (ECU), the approximate value derived from the observer model based on PSO, GA, and NLR to replace the defective sensor value. The model’s analytical redundancy is provided by the output of the approximate simulated value of the defective sensor.
This model assumes that the engine runs at a constant speed of 300 r/min. We utilized constant speed in this study since the engines in the process plant run at a constant speed most of the time. Because the article is focused on designing an AFTCS system, load changes and their influence on speed are not examined. The data for the MAP sensor and the throttle sensor at 300 r/min are derived using the available MATLAB model Lookup Tables (LTs). To generate nonlinear relation between the MAP sensor and the throttle sensor, the three approaches are applied. For an estimated value of malfunctioning sensors, the FDI unit uses these nonlinear relationships. It is also supposed that the time spent in switching and reconfiguring is zero seconds. In actuality, the controller computations will be delayed. The research has limitations in that it only examines full sensor failure types, neglecting partial failures, which will be addressed in future research. Many physical problems, such as open circuits owing to wire breakage or weak connections, or burnout due to any type of short-circuiting leading the sensor to produce low output, can cause this issue.


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}