
Discrete-Time System Conditional Optimization Based on Takagi–Sugeno Fuzzy Model Using the Full Transfer Function


Abstract
1. Introduction
2. Takagi–Sugeno Fuzzy Model
3. Parallel Distributed Compensation
4. Results
4.1. Takagi–Sugeno Model of the DC Motor Based on Linearized Models
4.2. Conditional Optimization under the Influence of Nonzero Initial Conditions
4.2.1. System Description
4.2.2. Relative Stability
4.2.3. Performance Index
4.3. Control Systems Design
4.4. Simulation and Experimental Results
5. The Major Contributions of the Work
- Three linear discrete-time mathematical models of the DC motor have been identified. A Takagi–Sugeno fuzzy model was constructed using these linear models, which represent the plant behavior around its nominal values. The membership functions are uniformly distributed, with their centers located at these nominal points;
- The characteristic polynomial of the full transfer function, rather than the traditional one, is used in this paper to carry out the conditional optimization synthesis technique. More specifically, the characteristic polynomial of the row nondegenerate full transfer function is the only one suitable and acceptable to be utilized for objective testing of system stability and optimization. The most general and realistic case of optimization was considered, thanks to the full transfer function, in which the error is the result of the simultaneous action of nonzero initial conditions and external input. Optimal parameters for three first-order PS controllers at zero and nonzero initial conditions are determined, considering that the individual closed-loop systems have a damping coefficient . The synthesis of the PDC controller, which uses the same membership functions as the TS fuzzy model, was performed in two cases. In the first case, the PDC controller is built by local linear first-order PS controllers, whose parameters are determined at zero initial conditions. In the second case, the PDC controller is composed of local linear controllers whose parameters are determined under nonzero initial conditions;
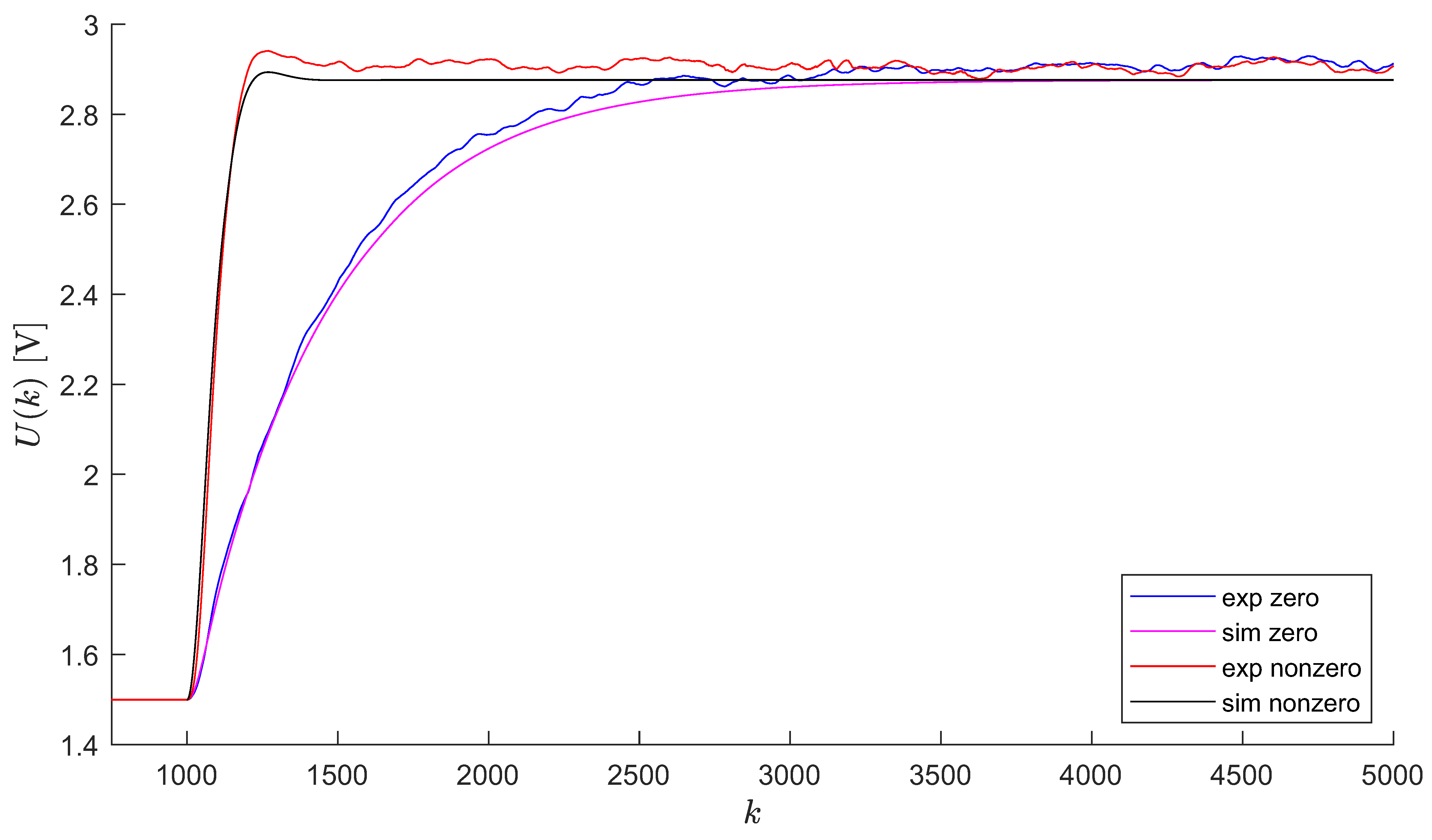
- Simulation and experimental results of comparing these two PDC controllers are presented to show that this paper’s technique is more comprehensive than the classical one because it considers nonzero initial conditions that the plant starts working from. The classical method offers parameters that should be universally optimal for any initial conditions, which is obviously not the case.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gruyitch, L.; Bučevac, Z.; Jovanović, R.; Zarić, V. Discrete-Time System Conditional Optimisation in the Parameter Space via the Full Transfer Function Matrix. Trans. Famena 2021, 45, 45–62. [Google Scholar] [CrossRef]
- Zarić, V.; Bučevac, Z.; Jovanović, R. Discrete-Time System Conditional Optimization in the Parameter Space with Nonzero Initial Conditions. Tech. Gaz. 2021, 29, 200–207. [Google Scholar] [CrossRef]
- Prabhat Dev, M.; Sidharth, J.; Kumar, H.; Tripathi, B.N.; Khan, S.A. Various Tuning and Optimization Techniques Employed in PID Controller: A Review. In Proceedings of the International Conference in Mechanical and Energy Technology; Springer: Singapore, 2020; pp. 797–805. [Google Scholar]
- Zhmud, V.; Hardt, W.; Stukach, O.V.; Dimitrov, L.; Nosek, J. The Parameter Optimization of the PID and PIDD Controller for a Discrete Object. In Proceedings of the 2019 Dynamics of Systems, Mechanisms and Machines (Dynamics), Omsk, Russia, 5–7 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, B.; Guo, X.; Zeng, X.; Dian, S. An optimal pid tuning method for a single-link manipulator based on the control parametrization technique. Discret. Contin. Dyn. Syst.-S 2020, 13, 1813–1823. [Google Scholar] [CrossRef]
- Kurokawa, R.; Sato, T.; Vilanova, R.; Konishi, Y. Discrete-Time First-Order Plus Dead-Time Model-Reference Trade-off PID Control Design. Appl. Sci. 2019, 9, 3220. [Google Scholar] [CrossRef]
- Li, Y.; Sheng, A.; Wang, Y. Synthesis of PID-type controllers without parametric models: A graphical approach. Energy Convers. Manag. 2008, 49, 2392–2402. [Google Scholar] [CrossRef]
- Gryazina, E.N.; Polyak, B.T. Stability regions in the parameter space: D-decomposition revisited. Automatica 2006, 42, 13–26. [Google Scholar] [CrossRef]
- Gryazina, E.N.; Polyak, B.T. Geometry of the stability domain in the parameter space: D-decomposition technique. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 6510–6515. [Google Scholar] [CrossRef]
- Kipnis, M.; Nigmatullin, R. D-decomposition method for stability checking for trinomial linear difference equation with two delays. Int. J. Pure Apllied Math. 2016, 111, 479–489. [Google Scholar] [CrossRef][Green Version]
- Gryazina, E.N.; Polyak, B.T.; Tremba, A.A. D-decomposition technique state-of-the-art. Autom. Remote Control 2008, 69, 1991–2026. [Google Scholar] [CrossRef]
- Sands, T. Control of DC Motors to Guide Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 2144. [Google Scholar] [CrossRef]
- Hoyos, F.E.; Candelo-Becerra, J.E.; Rincón, A. Zero Average Dynamic Controller for Speed Control of DC Motor. Appl. Sci. 2021, 11, 5608. [Google Scholar] [CrossRef]
- Kim, J.; Jon, U.; Lee, H. State-Constrained Sub-Optimal Tracking Controller for Continuous-Time Linear Time-Invariant (CT-LTI) Systems and Its Application for DC Motor Servo Systems. Appl. Sci. 2020, 10, 5724. [Google Scholar] [CrossRef]
- Hoyos, F.E.; Candelo-Becerra, J.E.; Hoyos Velasco, C.I. Application of Zero Average Dynamics and Fixed Point Induction Control Techniques to Control the Speed of a DC Motor with a Buck Converter. Appl. Sci. 2020, 10, 1807. [Google Scholar] [CrossRef]
- Akar Mehmet, T.I. Motion controller design for the speed control of DC servo motor. Int. J. Appl. Math. Inform. 2013, 7, 131–137. [Google Scholar]
- Sabir, M.M.; Khan, J.A. Optimal Design of PID Controller for the Speed Control of DC Motor by Using Metaheuristic Techniques. Adv. Artif. Neural Syst. 2014, 2014, 1–8. [Google Scholar] [CrossRef]
- Yordanova, S. Fuzzy logic approach to coupled level control. Syst. Sci. Control Eng. 2016, 4, 215–222. [Google Scholar] [CrossRef]
- Chao, C.T.; Sutarna, N.; Chiou, J.S.; Wang, C.J. Equivalence between Fuzzy PID Controllers and Conventional PID Controllers. Appl. Sci. 2017, 7, 513. [Google Scholar] [CrossRef]
- Tanaka, K.; Wang, H.O. Fuzzy Control Systems Design and Analysis; John Willey & Sons Inc.: New York, NY, USA, 2001. [Google Scholar] [CrossRef]
- Vrkalovic, S.; Teban, T.A.; Borlea, L.D. Stable Takagi-Sugeno fuzzy control designed by optimization. Int. J. Artif. Intell. 2017, 15, 17–29. [Google Scholar]
- Nguyen, A.T.; Taniguchi, T.; Eciolaza, L.; Campos, V.; Palhares, R.; Sugeno, M. Fuzzy Control Systems: Past, Present and Future. IEEE Comput. Intell. Mag. 2019, 14, 56–68. [Google Scholar] [CrossRef]
- Xie, X.; Yue, D.; Zhang, H.; Xue, Y. Fault Estimation Observer Design for Discrete-Time Takagi–Sugeno Fuzzy Systems Based on Homogenous Polynomially Parameter-Dependent Lyapunov Functions. IEEE Trans. Cybern. 2017, 47, 2504–2513. [Google Scholar] [CrossRef]
- Xie, X.; Yue, D.; Ma, T.; Zhu, X. Further Studies on Control Synthesis of Discrete-Time T-S Fuzzy Systems via Augmented Multi-Indexed Matrix Approach. IEEE Trans. Cybern. 2014, 44, 2784–2791. [Google Scholar] [CrossRef]
- Jovanović, R.; Zarić, V. Identification and control of a heat flow system based on the Takagi-Sugeno fuzzy model using the grey wolf optimizer. Therm. Sci. 2022, 26, 2275–2286. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 116–132. [Google Scholar] [CrossRef]
- Torres-Pinzón, C.A.; Paredes-Madrid, L.; Flores-Bahamonde, F.; Ramirez-Murillo, H. LMI-Fuzzy Control Design for Non-Minimum-Phase DC-DC Converters: An Application for Output Regulation. Appl. Sci. 2021, 11, 2286. [Google Scholar] [CrossRef]
- Zhang, B.; Shin, Y.C. A Data-Driven Approach of Takagi-Sugeno Fuzzy Control of Unknown Nonlinear Systems. Appl. Sci. 2021, 11, 62. [Google Scholar] [CrossRef]
- Chang, W.J.; Tsai, M.H.; Pen, C.L. Observer-Based Fuzzy Controller Design for Nonlinear Discrete-Time Singular Systems via Proportional Derivative Feedback Scheme. Appl. Sci. 2021, 11, 2833. [Google Scholar] [CrossRef]
- Shasadeghi, M.; Safarinejadian, B.; Farughian, A. Parallel distributed compensator design of tank level control based on fuzzy Takagi-Sugeno model. Appl. Soft Comput. 2014, 21, 280–285. [Google Scholar] [CrossRef]
- Seidi, M.; Markazi, A.H. Performance-oriented parallel distributed compensation. J. Frankl. Inst. 2011, 348, 1231–1244. [Google Scholar] [CrossRef]
- Taniguchi, T.; Tanaka, K.; Yamafuji, K.; Wang, H. Nonlinear model following control via Takagi-Sugeno fuzzy model. In Proceedings of the 1999 American Control Conference (Cat. No. 99CH36251), San Diego, CA, USA, 2–4 June 1999; Volume 3, pp. 1837–1841. [Google Scholar] [CrossRef]
- Viegas, D.; Batista, P.; Oliveira, P.; Silvestre, C. Distributed controller design and performance optimization for discrete-time linear systems. Optim. Control Appl. Methods 2021, 42, 126–143. [Google Scholar] [CrossRef]
- Borrelli, F.; Baotić, M.; Bemporad, A.; Morari, M. Dynamic programming for constrained optimal control of discrete-time linear hybrid systems. Automatica 2005, 41, 1709–1721. [Google Scholar] [CrossRef]
- Rosinová, D.; Hypiusová, M. Comparison of Nonlinear and Linear Controllers for Magnetic Levitation System. Appl. Sci. 2021, 11, 7795. [Google Scholar] [CrossRef]
- Wang, Y.S.; Matni, N.; Doyle, J. Localized LQR optimal control. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014. [Google Scholar] [CrossRef]
- Hansson, A. A primal-dual interior-point method for robust optimal control of linear discrete-time systems. IEEE Trans. Autom. Control 2000, 45, 1639–1655. [Google Scholar] [CrossRef]
- Orazbayev, B.B.; Ospanov, Y.A.; Orazbayeva, K.N.; Serimbetov, B.A. Multicriteria optimization in control of a chemical-technological system for production of benzene with fuzzy information. Bull. Tomsk Polytech. Univ. Geo Assets Eng. 2019, 330, 182–194. [Google Scholar] [CrossRef]
- Orazbayev, B.; Zhumadillayeva, A.; Orazbayeva, K.; Iskakova, S.; Utenova, B.; Gazizov, F.; Ilyashenko, S.; Afanaseva, O. The System of Models and Optimization of Operating Modes of a Catalytic Reforming Unit Using Initial Fuzzy Information. Energies 2022, 15, 1573. [Google Scholar] [CrossRef]
- Fel’dbaum, A.A. On the distribution of the roots of the characteristic equations of systems of regulation (in Russian). Avtom. I Telemeh. 1948, 9, 253–279. [Google Scholar]
- Izmailov, R.N. The Peak Effect in Stationary Linear Systems with Scalar Inputs and Outputs. Autom. Remote Control 1987, 48, 1018–1024. [Google Scholar]
- Polyak, B.; Tremba, A.; Khlebnikov, M.; Shcherbakov, P.; Smirnov, G. Large deviations in linear control systems with nonzero initial conditions. Autom. Remote Control 2015, 76, 957–976. [Google Scholar] [CrossRef]
- Buchevats, Z.M.; Gruyitch, L.T. Linear Discrete-Time Systems; CRC Press/Taylor & Francis Group: Boca Raton, FL, USA, 2017. [Google Scholar]
- Gruyitch, L. Advances in the Linear Dynamic Systems Theory; Llumina Press: Plantation, FL, USA, 2013. [Google Scholar]
- Gruyitch, L. Linear Continuous-Time Systems; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Sugeno, M.; Kang, G. Fuzzy modelling and control of multilayer incinerator. Fuzzy Sets Syst. 1986, 18, 329–345. [Google Scholar] [CrossRef]
- Wang, H.; Tanaka, K.; Griffin, M. Parallel distributed compensation of nonlinear systems by Takagi-Sugeno fuzzy model. In Proceedings of the 1995 IEEE International Conference on Fuzzy Systems, Yokohama, Japan, 20–24 March 1995; Volume 2, pp. 531–538. [Google Scholar] [CrossRef]
- Tanaka, K.; Sugeno, M. Stability analysis and design of fuzzy control systems. Fuzzy Sets Syst. 1992, 45, 135–156. [Google Scholar] [CrossRef]
- Siljak, D.D. Analysis and Synthesis of Feedback Control Systems in the Parameter Plane I-Linear Continuous Systems. IEEE Trans. Appl. Ind. 1964, 83, 449–458. [Google Scholar] [CrossRef]
- Siljak, D.D. Analysis and Synthesis of Feedback Control Systems in the Parameter Plane II-Sampled-Data Systems. IEEE Trans. Appl. Ind. 1964, 83, 458–466. [Google Scholar] [CrossRef]
- Grujić, L.T. Discrete Systems (In Serbian); Faculty of Mechanical Engineering: Belgrade, Serbian, 1991. [Google Scholar]
- Poularikas, A. Transforms and Applications Handbook; Electrical Engineering Handbook; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | [rad/s] | [V] | |||||
|---|---|---|---|---|---|---|---|
| 1 | 0.62 | 0.5 | 0.9398 | 0.1023 | −0.0138 | 0 | |
| 2 | 4.02 | 2.5 | 0.9444 | 0.0953 | −0.0149 | 0 | |
| 3 | 7.56 | 4.5 | 0.9443 | 0.1042 | −0.0477 | 0 |
| i | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 1.68 | 4.02 | 469.88 | 7.5919 | 43.2051 |
| 2 | −1 | −1 | −1.72 | 0.62 | 1502.26 | 6.9531 | 36.8605 |
| 3 | −3 | −3 | −5.26 | −2.92 | 3487.25 | 6.4655 | 34.1012 |
| i | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 | 1491.02 | 8.7564 | 9.8506 |
| 2 | 0 | 0 | 0 | 0 | 2500.6 | 8.0313 | 9.0201 |
| 3 | 0 | 0 | 0 | 0 | 4351.55 | 7.3831 | 8.3161 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jovanović, R.; Zarić, V.; Bučevac, Z.; Bugarić, U. Discrete-Time System Conditional Optimization Based on Takagi–Sugeno Fuzzy Model Using the Full Transfer Function. Appl. Sci. 2022, 12, 7705. https://doi.org/10.3390/app12157705
Jovanović R, Zarić V, Bučevac Z, Bugarić U. Discrete-Time System Conditional Optimization Based on Takagi–Sugeno Fuzzy Model Using the Full Transfer Function. Applied Sciences. 2022; 12(15):7705. https://doi.org/10.3390/app12157705
Chicago/Turabian StyleJovanović, Radiša, Vladimir Zarić, Zoran Bučevac, and Uglješa Bugarić. 2022. "Discrete-Time System Conditional Optimization Based on Takagi–Sugeno Fuzzy Model Using the Full Transfer Function" Applied Sciences 12, no. 15: 7705. https://doi.org/10.3390/app12157705
APA StyleJovanović, R., Zarić, V., Bučevac, Z., & Bugarić, U. (2022). Discrete-Time System Conditional Optimization Based on Takagi–Sugeno Fuzzy Model Using the Full Transfer Function. Applied Sciences, 12(15), 7705. https://doi.org/10.3390/app12157705