
Adaptive Sliding Mode Control via Backstepping for an Air-Breathing Hypersonic Vehicle Using a Double Power Reaching Law


Abstract
:1. Introduction
- (1)
- A novel double power reaching law for sliding mode is proposed, which can guarantee the state of system converge to zero equilibrium in finite time.
- (2)
- A novel backstepping-based sliding mode controller is designed. First, a backstepping control for a high-order nonlinear system is proposed, considering uncertain parameters. The method proposed adopts a strict feedback form with uncertain parameters, and thus, is suitable for dealing with the impact of mismatched uncertainties on AHV. Secondly, the backstepping control method is developed for altitude and velocity subsystems. Thirdly, combined with the new double power reaching law mentioned above, a backstepping-based sliding mode control approach is developed to enhance the robust performance of AHV. Finally, in order to ensure better tracking performance in case of high-level uncertainties, improved adaptive laws are proposed to compensate for the influence of uncertainties on AHVs.
2. Model of Air-Breathing Hypersonic Vehicle
3. Adaptive Sliding Mode Controller Design via Backstepping
3.1. A Double Power Reaching Law
3.2. The Design Steps for the Controller
3.3. Stability Analysis
- According to Equation (13), we get:
- 2.
- Fixed-time convergence
- (1)
- (2)
- s = 1→s = 0
4. Design of Tracking Controller for the AHV
5. Simulation Results
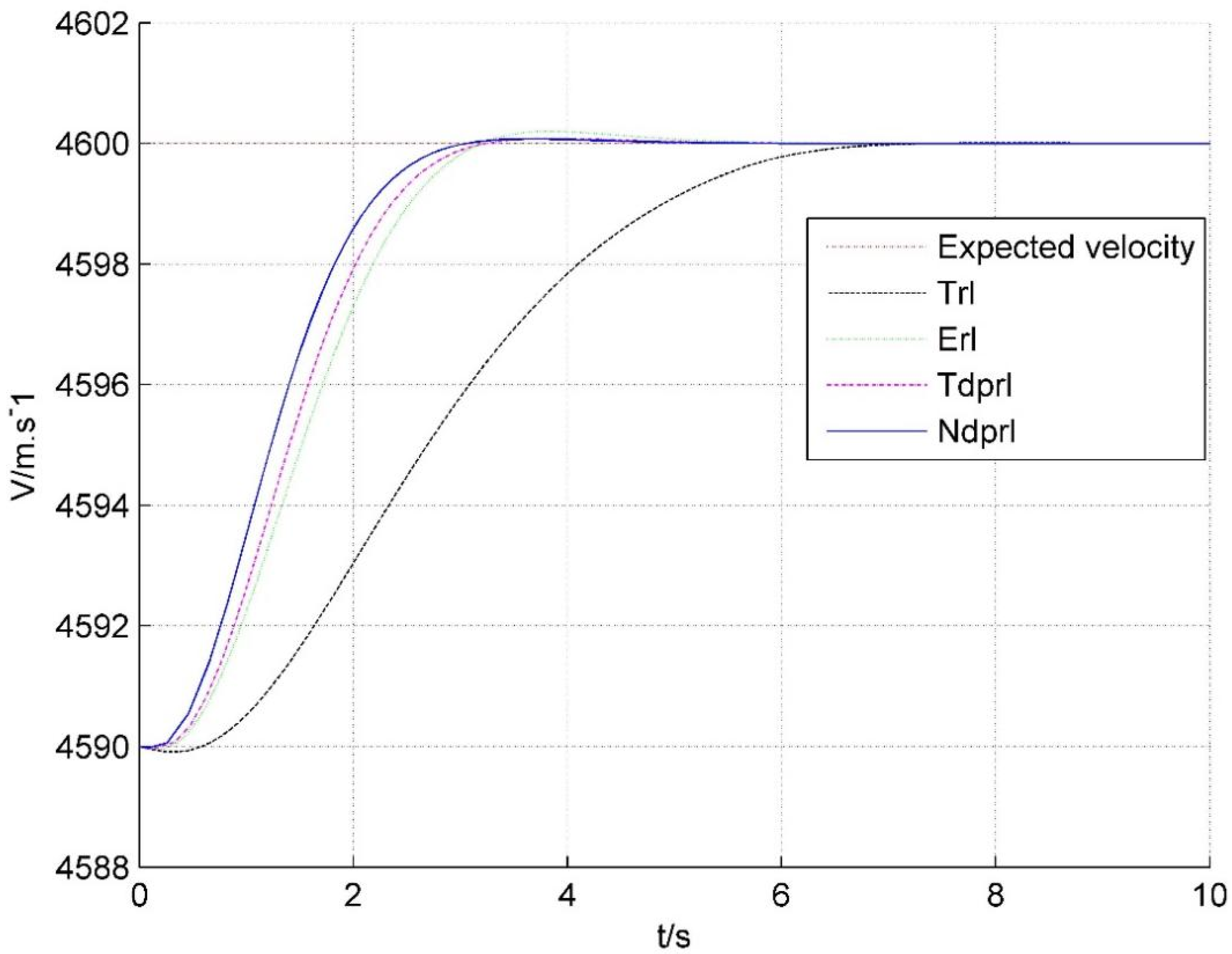
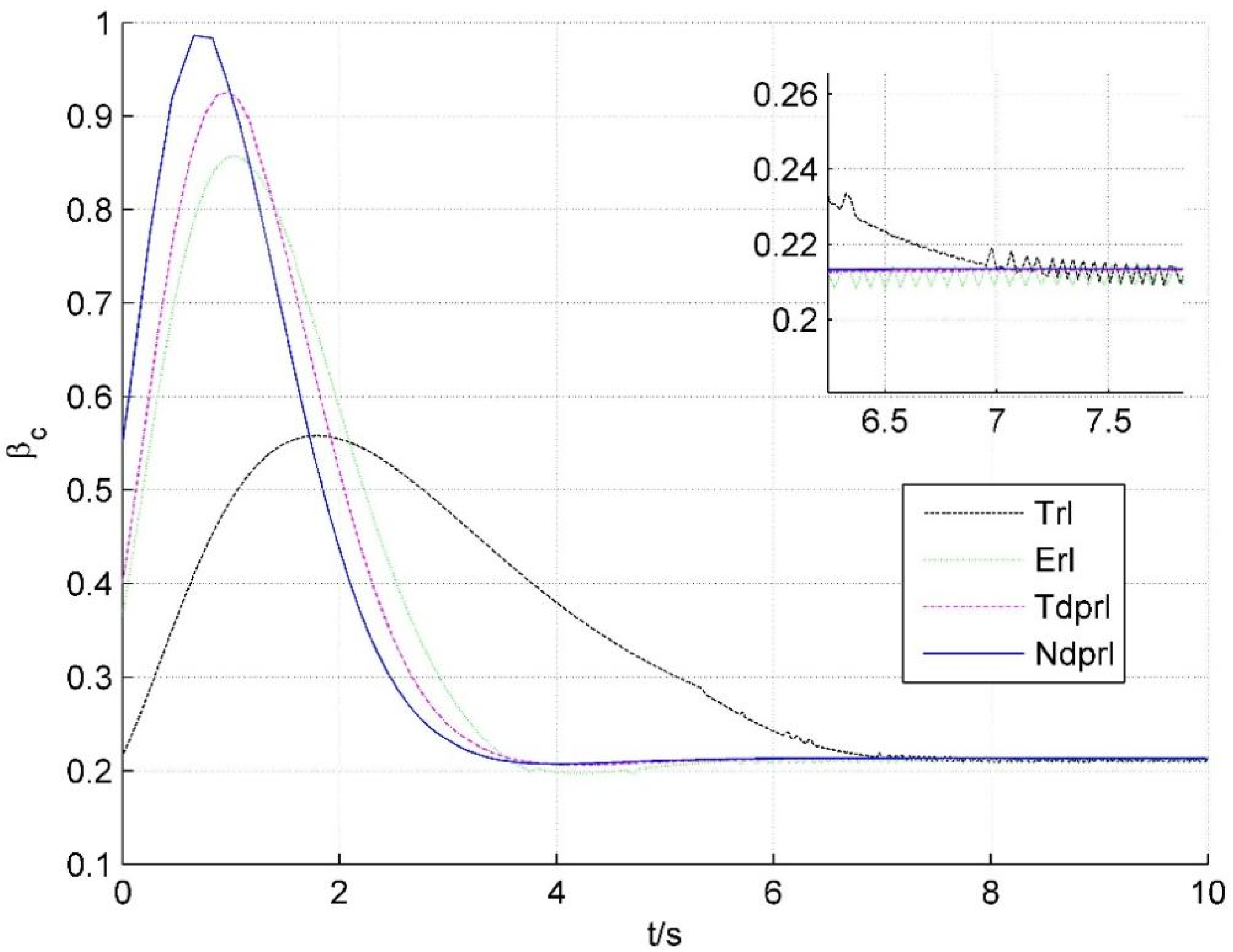
5.1. Scenario 1: Simulation of Reaching Laws
- (1)
- Trl:
- (2)
- Erl:
- (3)
- Tdprl:
- (4)
- Ndprl:
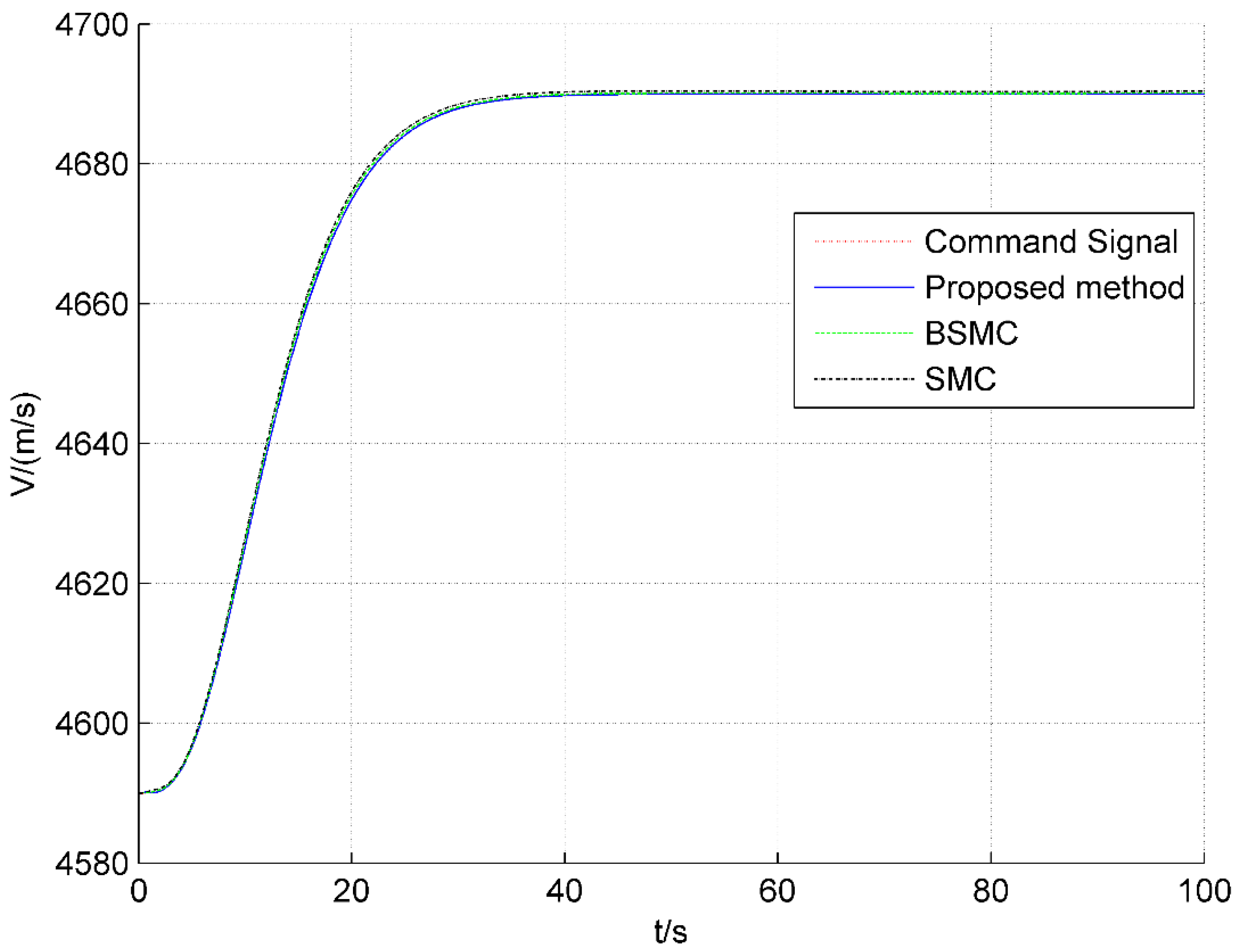
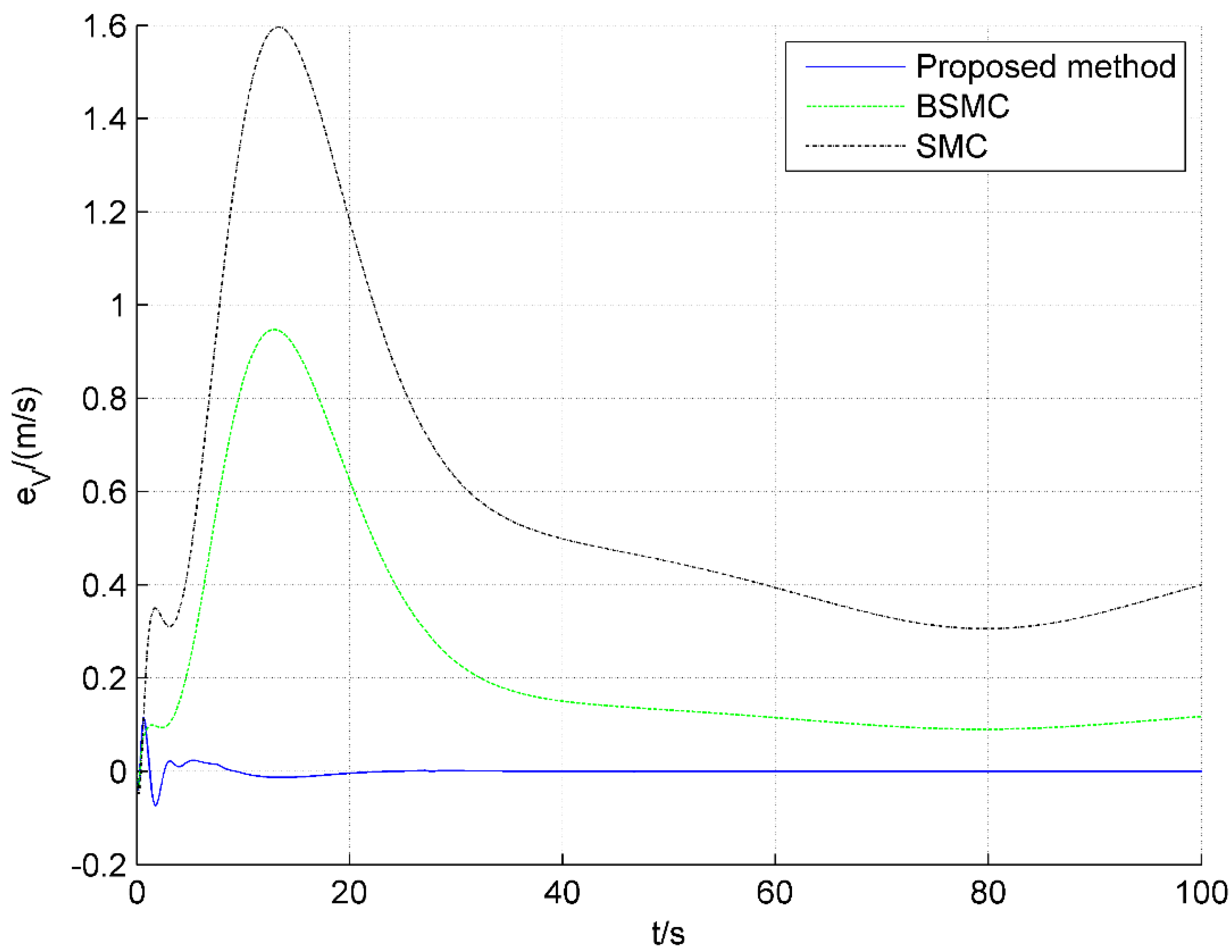
5.2. Scenario 2: Simulation of Controller for AHV
- (1)
- Mismatched uncertainties are set as 20%, which are represented as follows:
- (2)
- Uncertain parameters of control input, set as follows:
- (1)
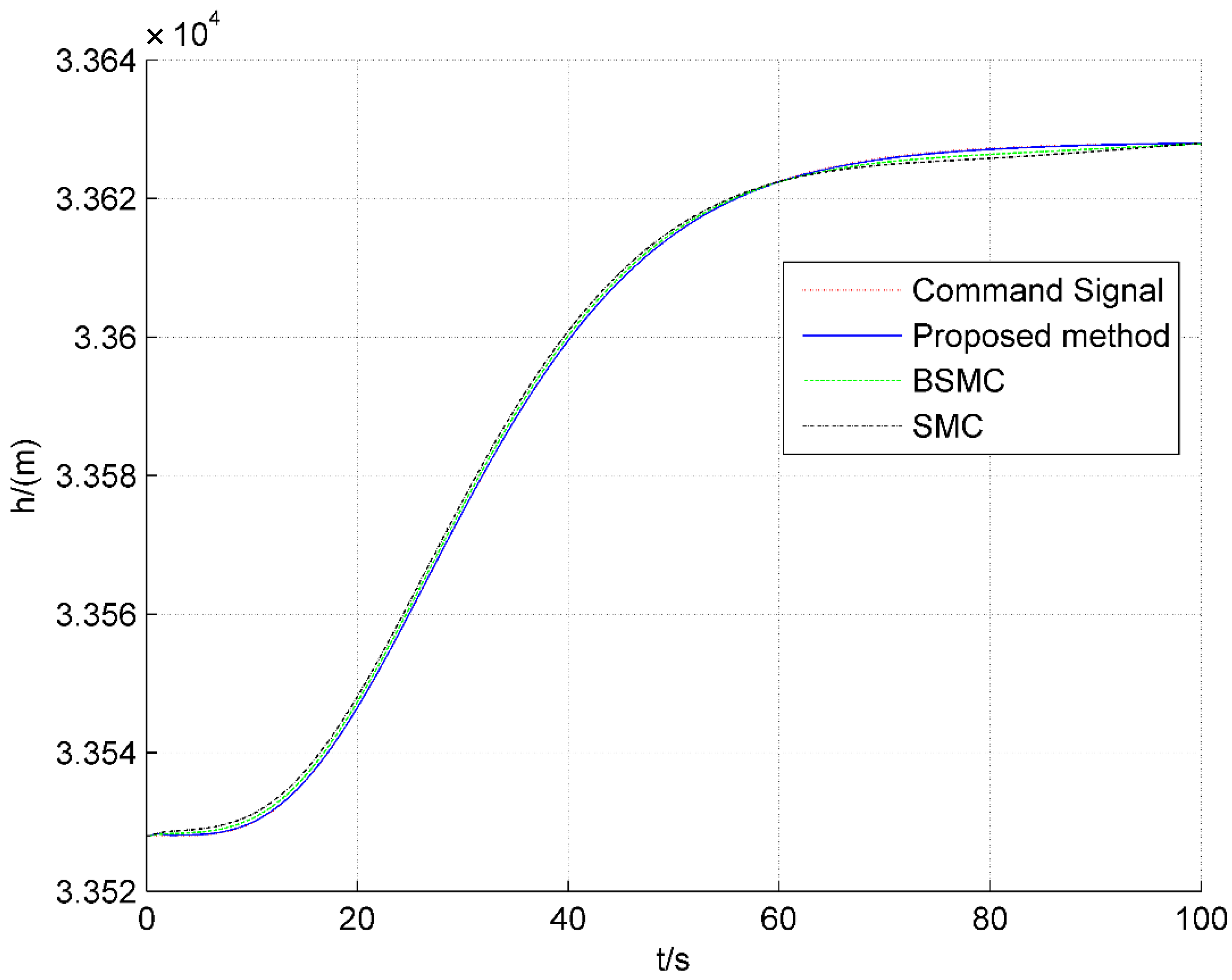
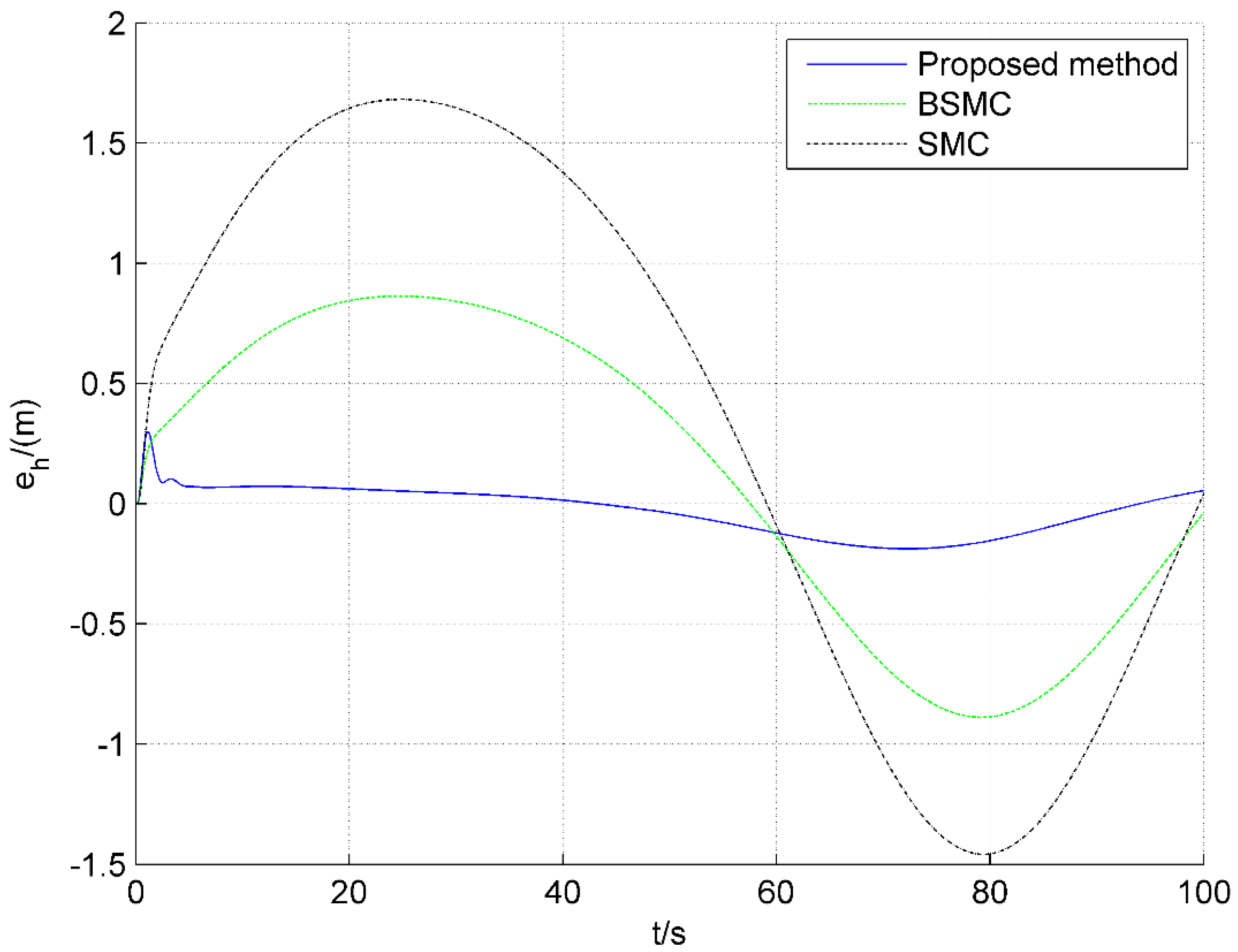
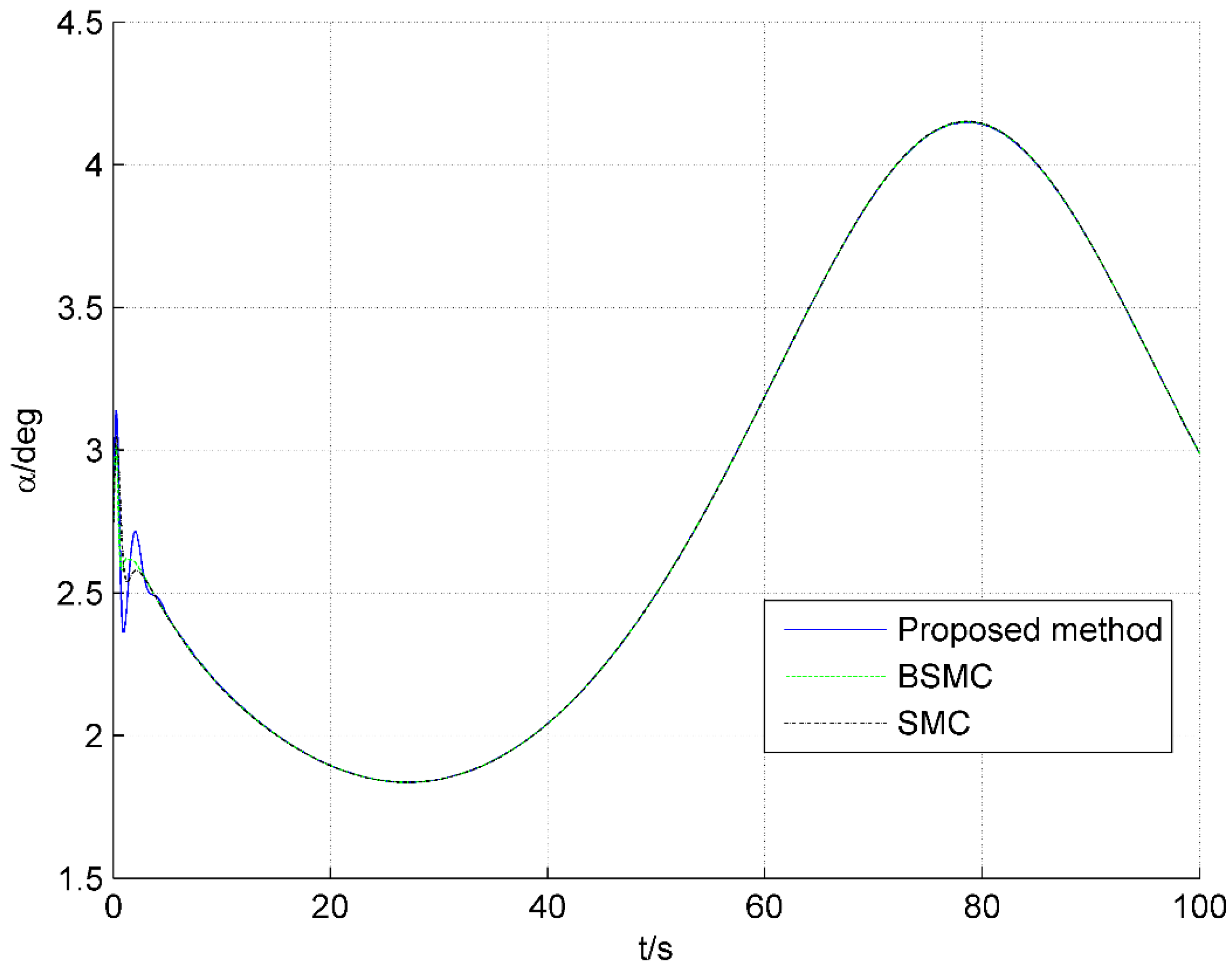
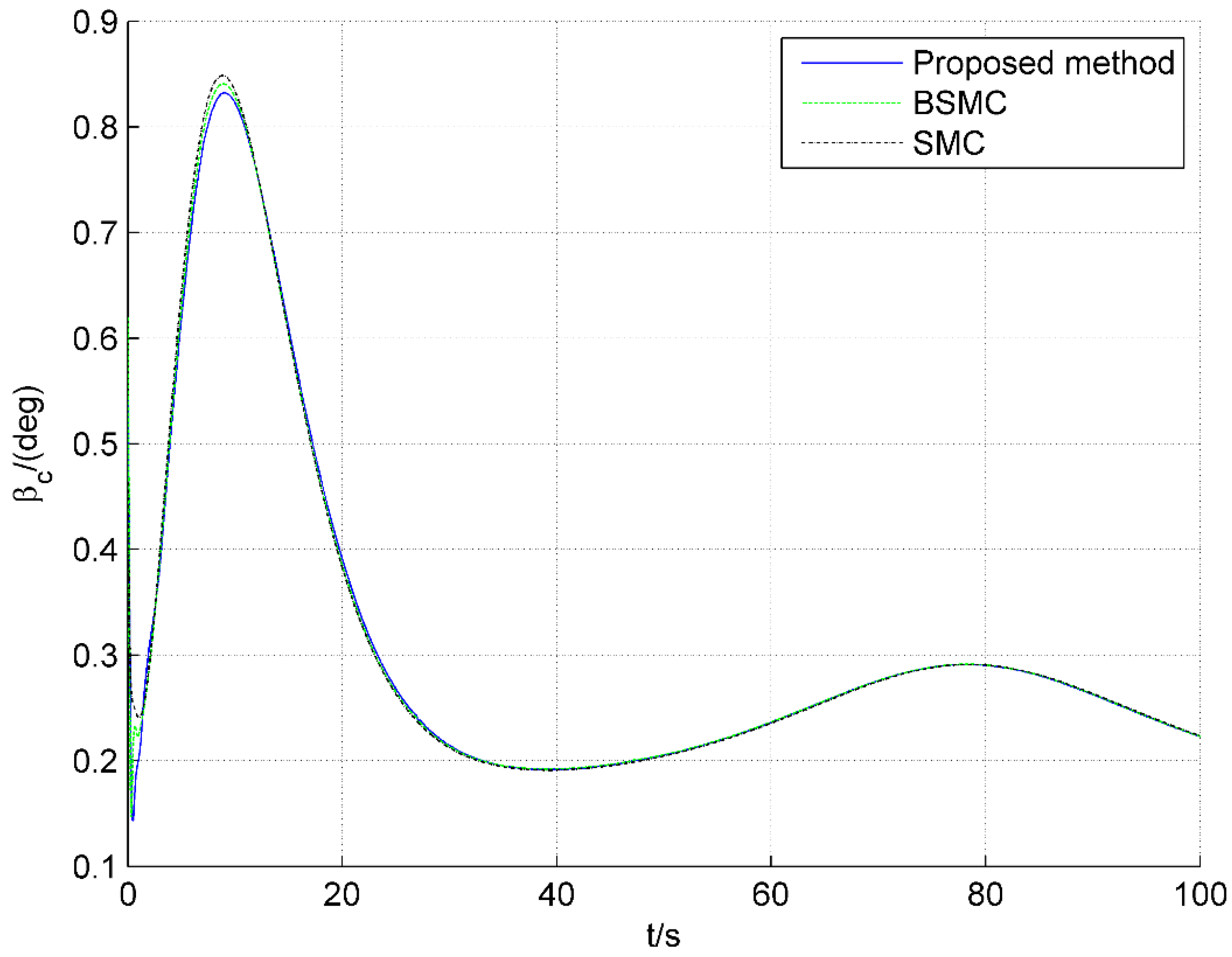
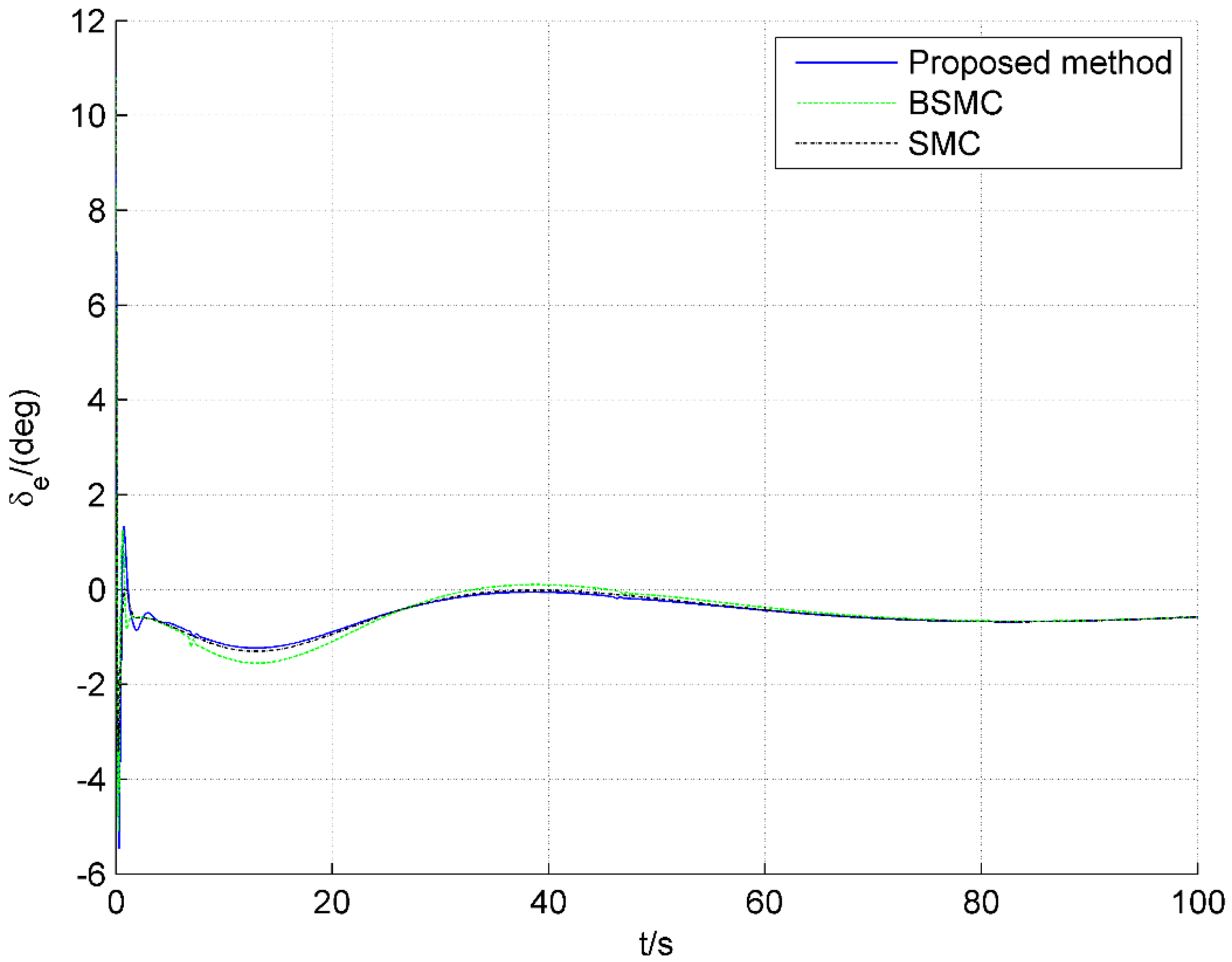
- The proposed method in this paper shows better tracking performance than SMC and BSMC. Firstly, the tracking error of altitude and velocity under the proposed method in this paper is smaller than that for SMC or BSMC. Secondly, the responses of the flight path angle, attack angle, and pitch angle rate under the proposed method in this paper change smoothly and steadily. Thirdly, the control input change under the proposed method is smooth and within the acceptable range. Therefore, the proposed method achieves better flight performance than BSMC and SMC.
- (2)
- The method proposed in this paper can effectively attenuate the influence of uncertainties surrounding AHVs. Improved adaptive laws are adopted to compensate for the adverse influence of uncertainties on AHVs. The tracking errors (caused by uncertainties) under the proposed method are observed to be smaller than those of BSMC and SMC.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fan, Y.; Zhu, W.; Bai, G. A cost-effective tracking algorithm for hypersonic glide vehicle maneuver based on modified aerodynamic model. Appl. Sci. 2016, 6, 312. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Sun, C.; Zhang, R.; Qian, C. Adaptive sliding mode control for re-entry attitude of near space hypersonic vehicle based on backstepping design. IEEE-CAA J. Automatic. 2015, 2, 94–101. [Google Scholar] [CrossRef]
- Li, H.; Zhou, Y.; Wang, Y.; Du, S.; Xu, S. Optimal cruise characteristic analysis and parameter optimization method for air-breathing hypersonic vehicle. Appl. Sci. 2021, 11, 9565. [Google Scholar] [CrossRef]
- Gao, H.; Chen, Z.; Sun, M.; Wang, Z.; Chen, Z. General periodic cruise guidance optimization for hypersonic vehicles. Appl. Sci. 2020, 10, 2898. [Google Scholar] [CrossRef] [Green Version]
- Pu, Z.; Yuan, R.; Tan, X.; Yi, J. Active robust control of uncertainty and flexibility suppression for air-breathing hypersonic vehicles. Aerosp. Sci. Technol. 2015, 42, 429–441. [Google Scholar] [CrossRef]
- Parker, J.T.; Serrani, A.; Yurkovich, S.; Bolender, M.A.; Doman, D.B. Control-oriented modeling of an air-breathing hypersonic vehicle. J. Guid. Control Dyn. 2007, 30, 856–869. [Google Scholar] [CrossRef]
- Jiao, X.; Fidan, B.; Jiang, J.; Kamel, M. Type-2 fuzzy adaptive sliding mode control of hypersonic flight. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 2731–2744. [Google Scholar] [CrossRef]
- Zong, Q.; Ji, Y.; Zeng, F.; Liu, H. Output feedback backstepping control for a generic hypersonic vehicle via small-gain theorem. Aerosp. Sci. Technol. 2012, 23, 409–417. [Google Scholar] [CrossRef]
- Su, X.; Jia, Y. Self-scheduled robust decoupling control with H∞ performance of hypersonic vehicles. Syst. Control Lett. 2014, 70, 38–48. [Google Scholar] [CrossRef]
- Wu, H.; Feng, S.; Liu, Z.; Guo, L. Disturbance observer based robust mixed H2/H∞ fuzzy tracking control for hypersonic vehicles. Fuzzy Sets Syst. 2017, 306, 118–136. [Google Scholar] [CrossRef]
- Shen, Q.; Jiang, B.; Cocquempot, V. Fault-tolerant control for T-S fuzzy systems with application to near-space hypersonic vehicle with actuator faults. IEEE Trans. Fuzzy Syst. 2012, 20, 652–665. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Yan, H. Reliable fuzzy tracking control of near-space hypersonic vehicle using aperiodic measurement information. IEEE Trans. Ind. Electron. 2019, 66, 9439–9447. [Google Scholar] [CrossRef]
- Hu, X.; Wu, L.; Hu, C.; Wang, Z.; Gao, H. Dynamic output feedback control of a flexible air-breathing hypersonic vehicle via T-S fuzzy approach. Int. J. Syst. Sci. 2014, 45, 1740–1756. [Google Scholar] [CrossRef]
- Xu, B.; Wang, D.; Zhang, Y.; Shi, Z. DOB-based neural control of flexible hypersonic flight vehicle considering wind effects. IEEE Trans. Ind. Electron. 2017, 64, 8676–8685. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, Q.; Pan, Y. Neural network based dynamic surface control of hypersonic flight dynamics using small-gain theorem. Neurocomputing 2016, 173, 690–699. [Google Scholar] [CrossRef]
- Bu, X.; Wu, X.; Huang, J.; Ma, Z.; Zhang, R. Minimal-learning-parameter based simplified adaptive neural back-stepping control of flexible air-breathing hypersonic vehicles without virtual controllers. Neurocomputing 2016, 175, 816–825. [Google Scholar] [CrossRef]
- Basin, M.V.; Yu, P.; Shtessel, Y.B. Hypersonic missile adaptive sliding mode control using finite- and fixed-time observers. IEEE Trans. Ind. Electron. 2018, 65, 930–941. [Google Scholar] [CrossRef]
- Wang, J.; Wu, Y.; Dong, X. Recursive terminal sliding mode control for hypersonic flight vehicle with sliding mode disturbance observer. Nonlinear Dyn. 2015, 81, 1489–1510. [Google Scholar] [CrossRef]
- Sun, H.; Li, S.; Sun, C. Finite time integral sliding mode control of hypersonic vehicles. Nonlinear Dyn. 2013, 73, 229–244. [Google Scholar] [CrossRef]
- Guo, Z.; Chang, J.; Guo, J.; Zhou, J. Adaptive twisting sliding mode algorithm for hypersonic reentry vehicle attitude control based on finite-time observer. ISA Trans. 2018, 77, 20–29. [Google Scholar] [CrossRef]
- Wu, G.; Meng, X. Nonlinear disturbance observer based robust backstepping control for a flexible air-breathing hypersonic vehicle. Aerosp. Sci. Technol. 2016, 54, 174–182. [Google Scholar] [CrossRef]
- Ye, L.; Zong, Q.; Tian, B.; Zhang, X.; Wang, F. Control-oriented modeling and adaptive backstepping control for a nonminimum phase hypersonic vehicle. ISA Trans. 2017, 70, 161–172. [Google Scholar] [CrossRef] [PubMed]
- Bu, X.; Wu, X.; Zhang, R.; Ma, Z.; Huang, J. Tracking differentiator design for the robust backstepping control of a flexible air-breathing hypersonic vehicle. J. Franklin Inst. 2015, 352, 1739–1765. [Google Scholar] [CrossRef]
- Zong, Q.; Wang, F.; Tian, B.; Wang, J. Robust adaptive approximate backstepping control design for a flexible air-breathing hypersonic vehicle. J. Aerosp. Eng. 2015, 28, 04014107. [Google Scholar] [CrossRef]
- An, H.; Xia, H.; Wang, C. Barrier lyapunov function-based adaptive control for hypersonic flight vehicles. Nonlinear Dyn. 2017, 88, 1833–1853. [Google Scholar] [CrossRef]
- Hu, Q.; Wang, C.; Li, Y.; Huang, J. Adaptive control for hypersonic vehicles with time-varying faults. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1442–1455. [Google Scholar] [CrossRef]
- Liu, J.; An, H.; Gao, Y.; Wang, C.; Wu, L. Adaptive control of hypersonic flight vehicles with limited angle-of-attack. IEEE-ASME Trans. Mechatron. 2018, 23, 883–894. [Google Scholar] [CrossRef]
- Fiorentini, L.; Serrani, A.; Bolender, M.A.; Doman, D.B. Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles. J. Guid. Control Dyn. 2009, 32, 402–417. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, R.; Xue, T.; Lei, Z. Exponential sliding mode tracking control via back-stepping approach for a hypersonic vehicle with mismatched uncertainty. J. Franklin Inst. 2016, 353, 2319–2343. [Google Scholar] [CrossRef]
- Zong, Q.; Wang, F.; Su, R.; Shao, S. Robust adaptive backstepping tracking control for a flexible air-breathing hypersonic vehicle subject to input constraint. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 10–25. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, J.; Yu, C. Adaptive backstepping sliding mode control of air-breathing hypersonic vehicles. Int. J. Aerosp. Eng. 2020, 2020, 8891051. [Google Scholar] [CrossRef]
- Ma, G.; Chen, C.; Lyu, Y.; Guo, Y. Adaptive backstepping-based neural network control for hypersonic reentry vehicle with input constraints. IEEE Access 2018, 6, 1954–1966. [Google Scholar] [CrossRef]
- Qi, R.; Huang, Y.; Jiang, B.; Tao, G. Adaptive backstepping control for a hypersonic vehicle with uncertain parameters and actuator faults. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2013, 227, 51–61. [Google Scholar] [CrossRef]
- Hu, Q.; Meng, Y. Adaptive backstepping control for air-breathing hypersonic vehicle with actuator dynamics. Aerosp. Sci. Technol. 2017, 67, 412–421. [Google Scholar] [CrossRef]
- Zong, Q.; Wang, J.; Tian, B.; Tao, Y. Quasi-continuous high-order sliding mode controller and observer design for flexible hypersonic vehicle. Aerosp. Sci. Technol. 2013, 27, 127–137. [Google Scholar] [CrossRef]
- Mu, C.; Zong, Q.; Tian, B.; Xu, W. Continuous sliding mode controller with disturbance observer for hypersonic vehicles. IEEE-CAA J. Autom. 2015, 2, 45–55. [Google Scholar]
- Zong, Q.; Dong, Q.; Wang, F.; Tian, B. Super twisting sliding mode control for a flexible air-breathing hypersonic vehicle based on disturbance observer. Sci. China Inf. Sci. 2015, 58, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-Mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Ke, D.; Wang, F.; He, L.; Li, Z. Predictive current control for PMSM systems using extended sliding mode observer with Hurwitz-based power reaching law. IEEE Trans. Power Electron. 2021, 36, 7223–7232. [Google Scholar] [CrossRef]
- Xu, S.S.; Chen, C.; Wu, Z. Study of Nonsingular Fast Terminal Sliding-Mode Fault-Tolerant Control. IEEE Trans. Ind. Electron. 2015, 62, 3906–3913. [Google Scholar] [CrossRef]
- Tao, M.; Chen, Q.; He, X.; Sun, M. Adaptive fixed-time fault-tolerant control for rigid spacecraft using a double power reaching law. Int. J. Robust Nonlinear Control 2019, 29, 4022–4040. [Google Scholar] [CrossRef]
- Hu, X.; Wu, L.; Hu, C.; Gao, H. Adaptive sliding mode tracking control for a flexible air-breathing hypersonic vehicle. J. Franklin Inst. 2012, 349, 559–577. [Google Scholar] [CrossRef]
- Wu, Y.; Zuo, J.; Sun, L. Adaptive terminal sliding mode control for hypersonic flight vehicles with strictly lower convex function based nonlinear disturbance observer. ISA Trans. 2017, 71, 215–226. [Google Scholar] [CrossRef] [PubMed]
- Sagliano, M.; Mooij, E.; Theil, S. Adaptive disturbance-based high-order sliding-mode control for hypersonic-entry vehicles. J. Guid. Control Dyn. 2017, 40, 521–536. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Mirmirani, M.D.; Ioannou, P.A. Adaptive sliding mode control design for a hypersonic flight vehicle. J. Guid. Control Dyn. 2004, 27, 829–838. [Google Scholar] [CrossRef]
- Xu, B.; Qi, R.; Jiang, B. Adaptive fault-tolerant control for HSV with unknown control direction. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2743–2758. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Yu, X. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer. IEEE Trans. Ind. Electron. 2013, 60, 160–169. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ndprl | Tdprl | Erl | Trl |
|---|---|---|---|
| Parameter | Value | Unites |
|---|---|---|
| Mass | 136,820 | kg |
| Reference area | 334.73 | m |
| Aerodynamic chord | 24.38 | |
| Moment of inertia | 9,490,740 |
| Parameter | Value |
|---|---|
| 7 | |
| 7 | |
| 1 | |
| 1 | |
| 1 | |
| 1 | |
| 3 | |
| 1.1 | |
| 1.1 | |
| 3.5 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, S.; Jiang, J.; Li, O. Adaptive Sliding Mode Control via Backstepping for an Air-Breathing Hypersonic Vehicle Using a Double Power Reaching Law. Appl. Sci. 2022, 12, 6341. https://doi.org/10.3390/app12136341
Huang S, Jiang J, Li O. Adaptive Sliding Mode Control via Backstepping for an Air-Breathing Hypersonic Vehicle Using a Double Power Reaching Law. Applied Sciences. 2022; 12(13):6341. https://doi.org/10.3390/app12136341
Chicago/Turabian StyleHuang, Shutong, Ju Jiang, and Ouxun Li. 2022. "Adaptive Sliding Mode Control via Backstepping for an Air-Breathing Hypersonic Vehicle Using a Double Power Reaching Law" Applied Sciences 12, no. 13: 6341. https://doi.org/10.3390/app12136341
APA StyleHuang, S., Jiang, J., & Li, O. (2022). Adaptive Sliding Mode Control via Backstepping for an Air-Breathing Hypersonic Vehicle Using a Double Power Reaching Law. Applied Sciences, 12(13), 6341. https://doi.org/10.3390/app12136341