
Virtual Reality Training Application for the Condition-Based Maintenance of Induction Motors

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
- Its ability to fill the existing gap in traditional training thanks to the great advantages offered by state-of-the-art virtual reality devices, such as a great cost-effectiveness, reduced learning times, improved visualization, the ability to understand and develop skills in a risk-free environment as well as the ability to allow the user to interact with the environment in a natural way;
- The strong link it establishes between the theoretical basis and practice related to the condition-based maintenance of induction motors by means of a VR application as a complementary experimental tool;
- Its capacity to provide a model for the design and development of an effective VR application, as recent advances in VR technology still show limitations in natural interactions and high development costs.
2. Related Work
2.1. Virtual Reality Applications
2.2. Induction Motor Faults by Current Analysis
3. Theoretical Basis
3.1. Virtual Reality as a Training Tool
3.2. Fault-Related Frequency Components for Detecting Faults in Induction Motors and Gearboxes
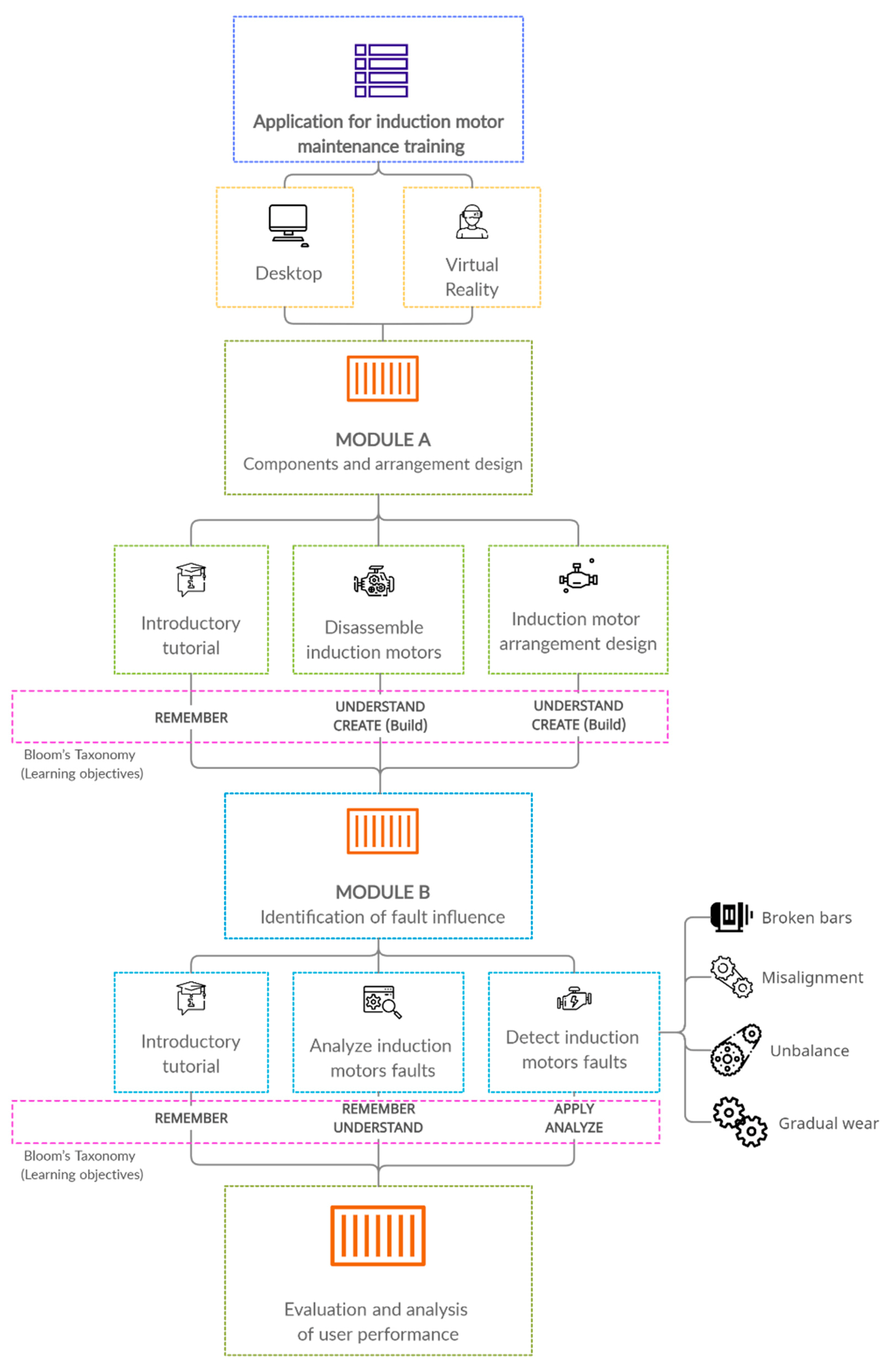
4. Materials and Methods
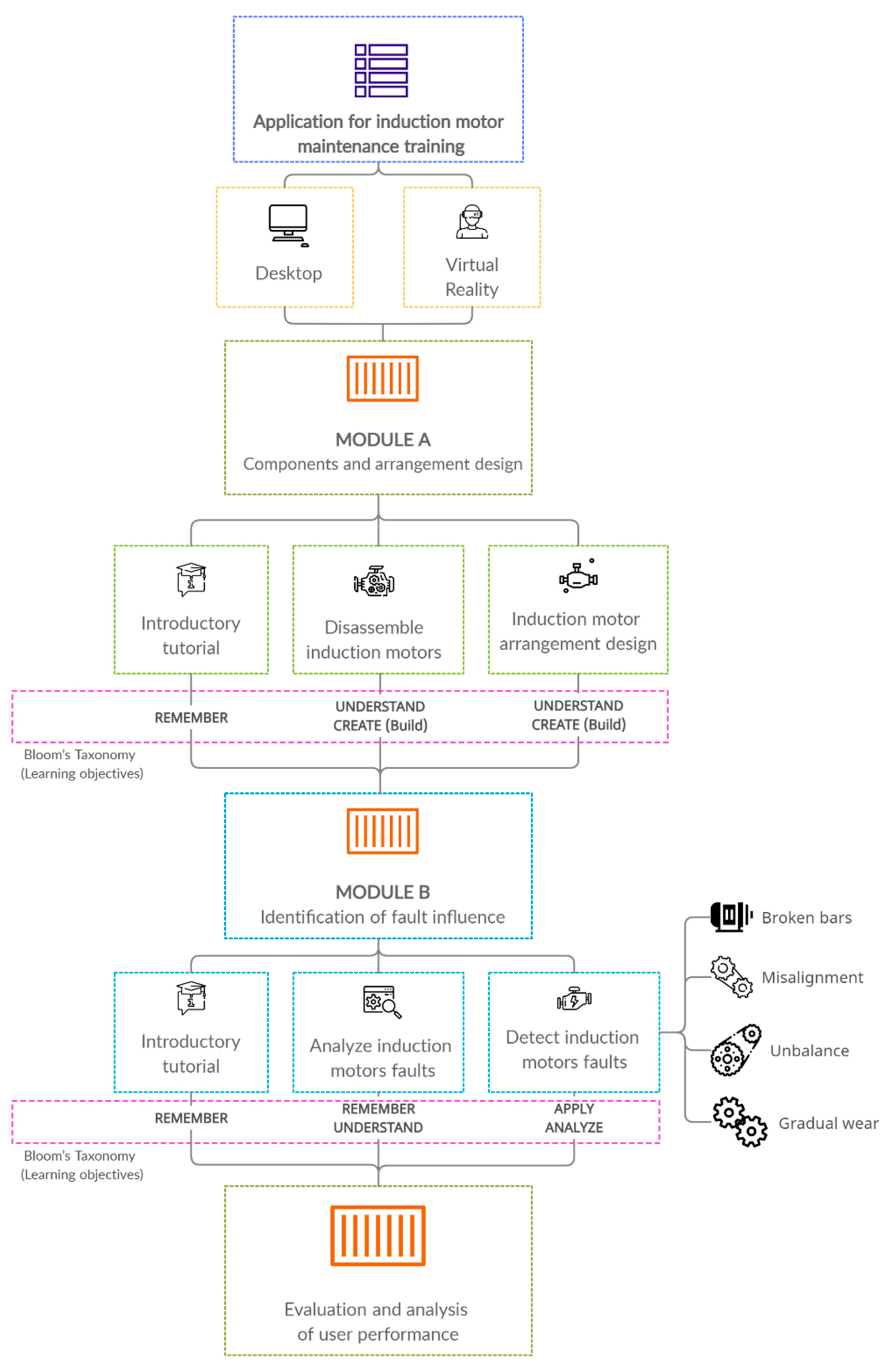
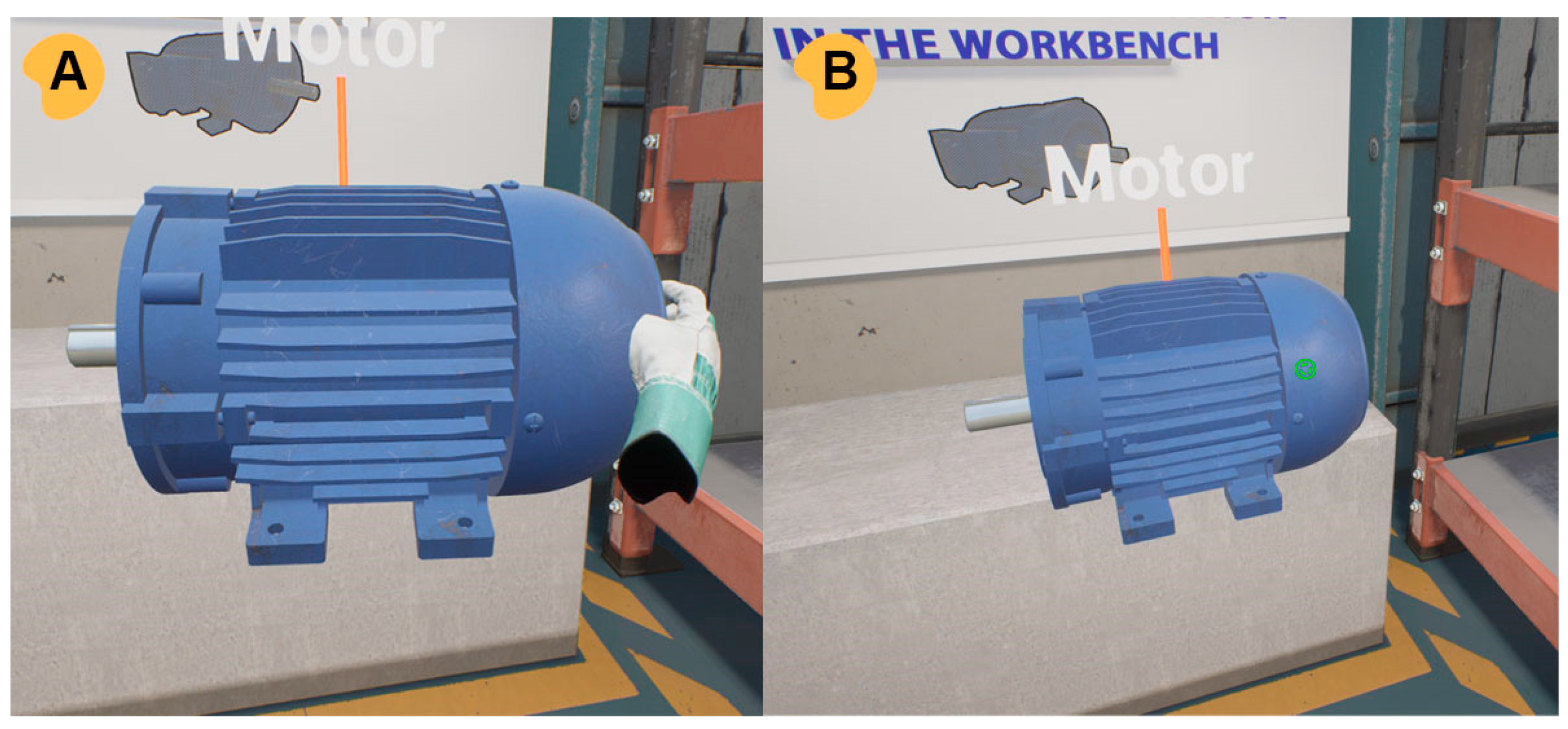
- Introductory tutorial: In any immersive virtual reality training application, it is important for the user to have sufficient time to become familiar with the virtual reality devices. This familiarization period is important because the novelty of VR environments and interfaces can limit the user’s learning experience, especially if such devices are new to the user. Therefore, these applications must include an extensive pre-training phase, in which students acquire sufficient knowledge through their interaction with the VR environment. This level is also used to train users in how the VR interface can be used, such as by grabbing and placing objects, and through a tutorial, in which the user, guided by the instructions that appear on the board, has to assemble a motor arrangement on the workbench, as can be seen in Figure 2. The procedure is simple: first, place the induction motor, then the DC generator and finally a coupling so that the system will function. In this way, this first level serves as an introduction to the devices, and some practical and operational knowledge is shared with the student. It also serves as a learning experience of the mechanics that will be used throughout the activity and familiarizes the user with the way the information is presented. Finally, it helps mitigate any initial reaction towards the VR environment, which can reduce user attention, if presented with relevant information early on;
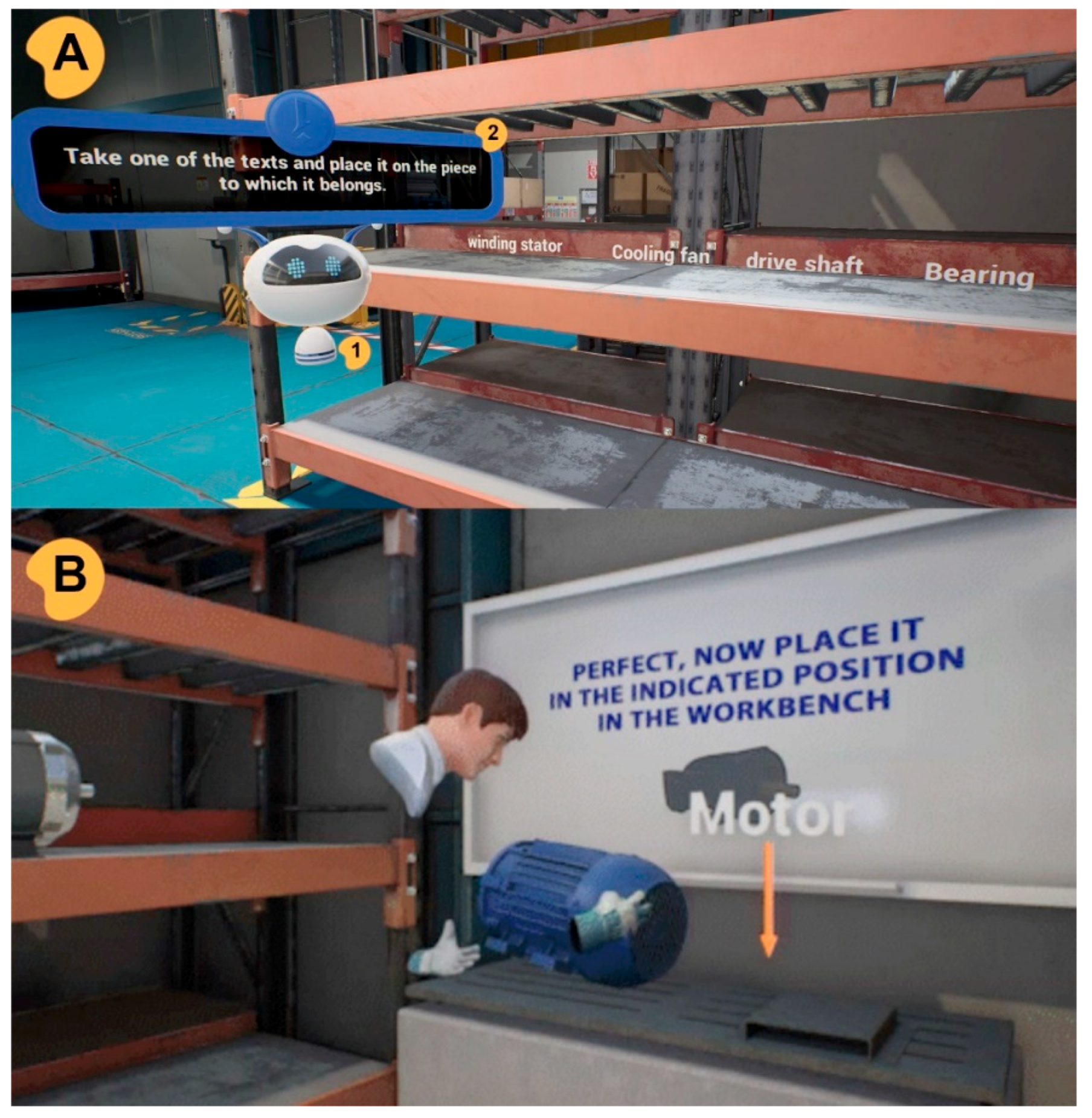
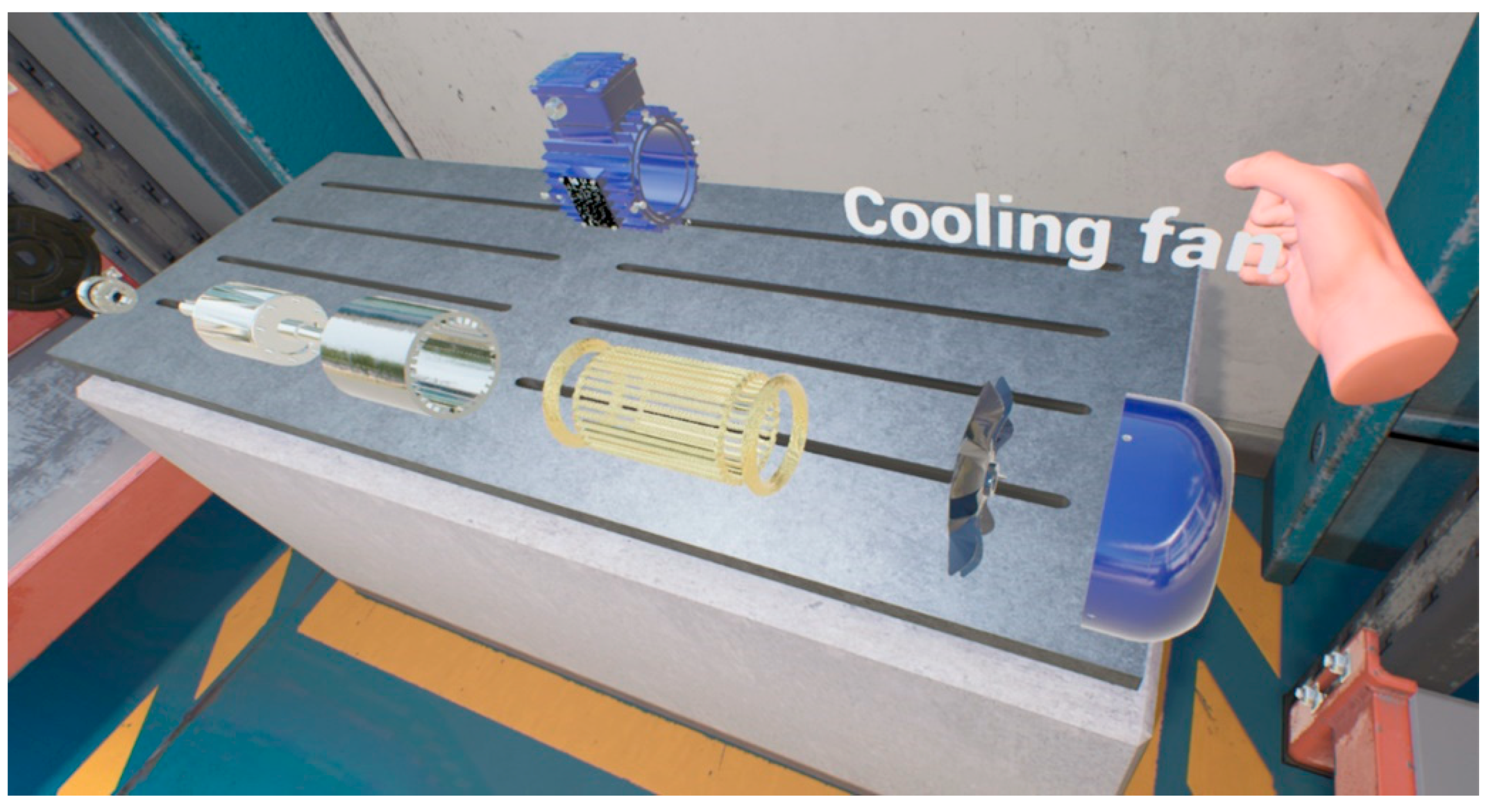
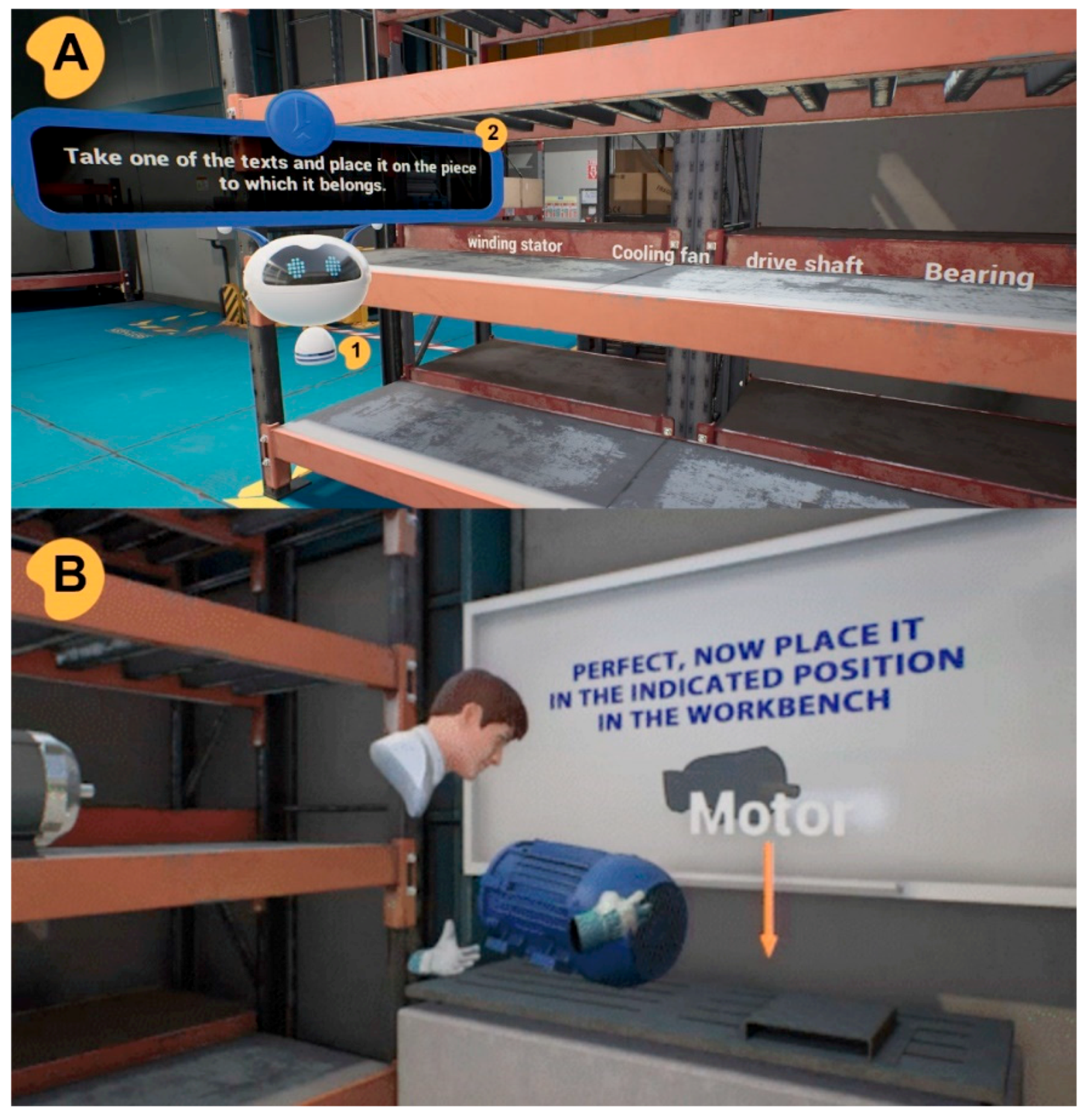
- Disassembly of induction motors: Accurate knowledge of the components of an induction motor is essential for an understanding of its operating principles. VR provides a space with a higher degree of visualization than other less immersive environments, in which machines may be assembled and disassembled, and every part inspected in the context of the whole machine. At this level, the user interacts with a disassembled induction motor. The induction motors are composed of several parts, with the most important being the stator, rotor, shaft, bearings and frame. Individual parts can be examined closely. The objective is to identify each one of them, and to do so, the user must label them with a name, as shown in Figure 3;
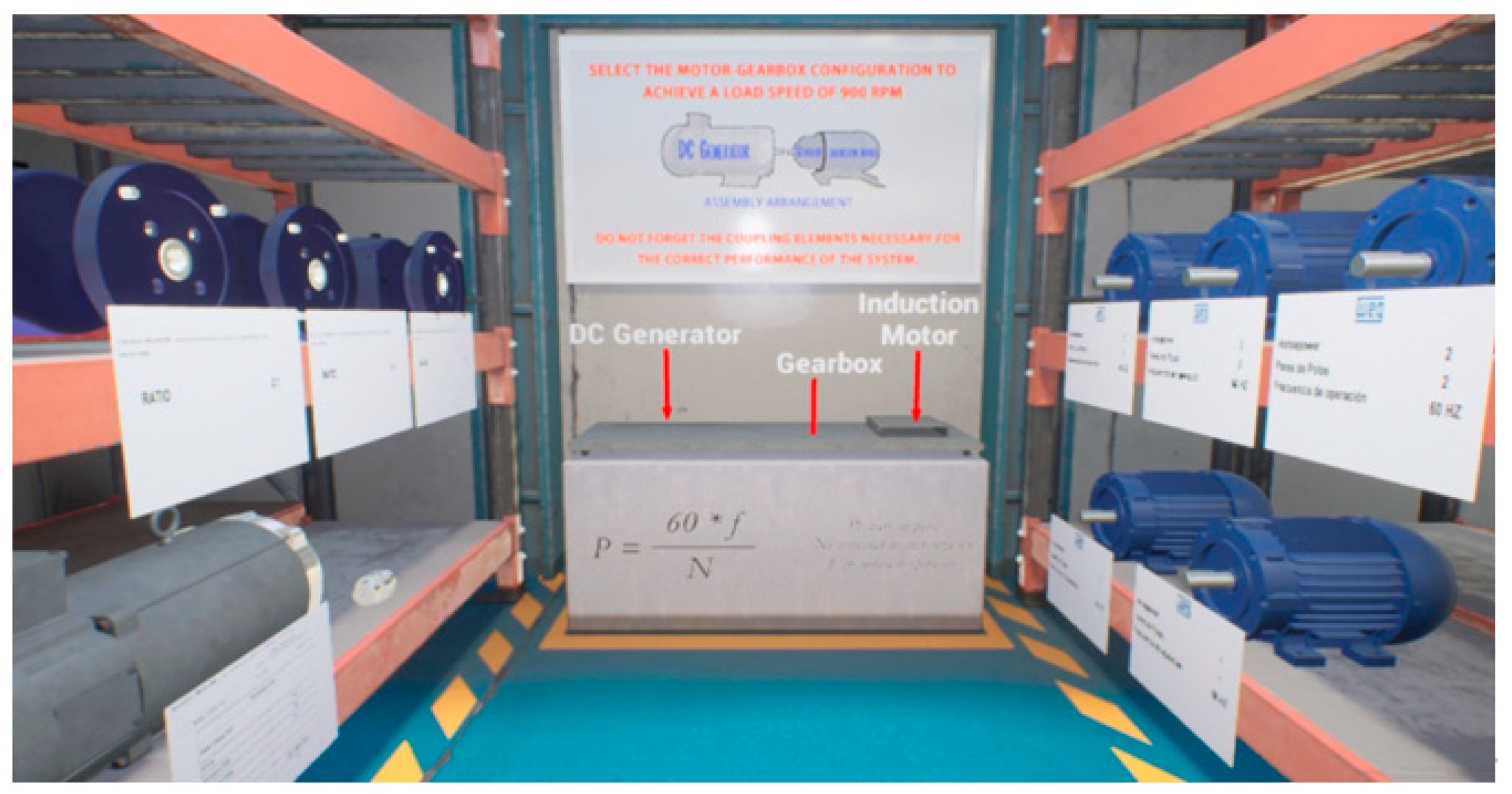
- Induction motors arrangement design: This level has a twofold objective. On the one hand, the objective is to understand the connections between the motor and the integration of the gearboxes in the formation of a kinematic chain, which is also comprised of components such as generators and couplings. Secondly, the objective is to understand and to apply the synchronous speed equation, Equation (3). The user must, through self-instruction, select the motor and gear case arrangement that achieves the motor speed, , at 900 revolutions per minute (r.p.m.). For this purpose, the user has access to a large number of different motors and gear cases, as shown in Figure 4. The user has to make use of the theoretical formula, Equation (3), overprinted on the workbench, with which the problem may be solved. The arrangement is fully modifiable, so that the user can wind back the process in case of error.
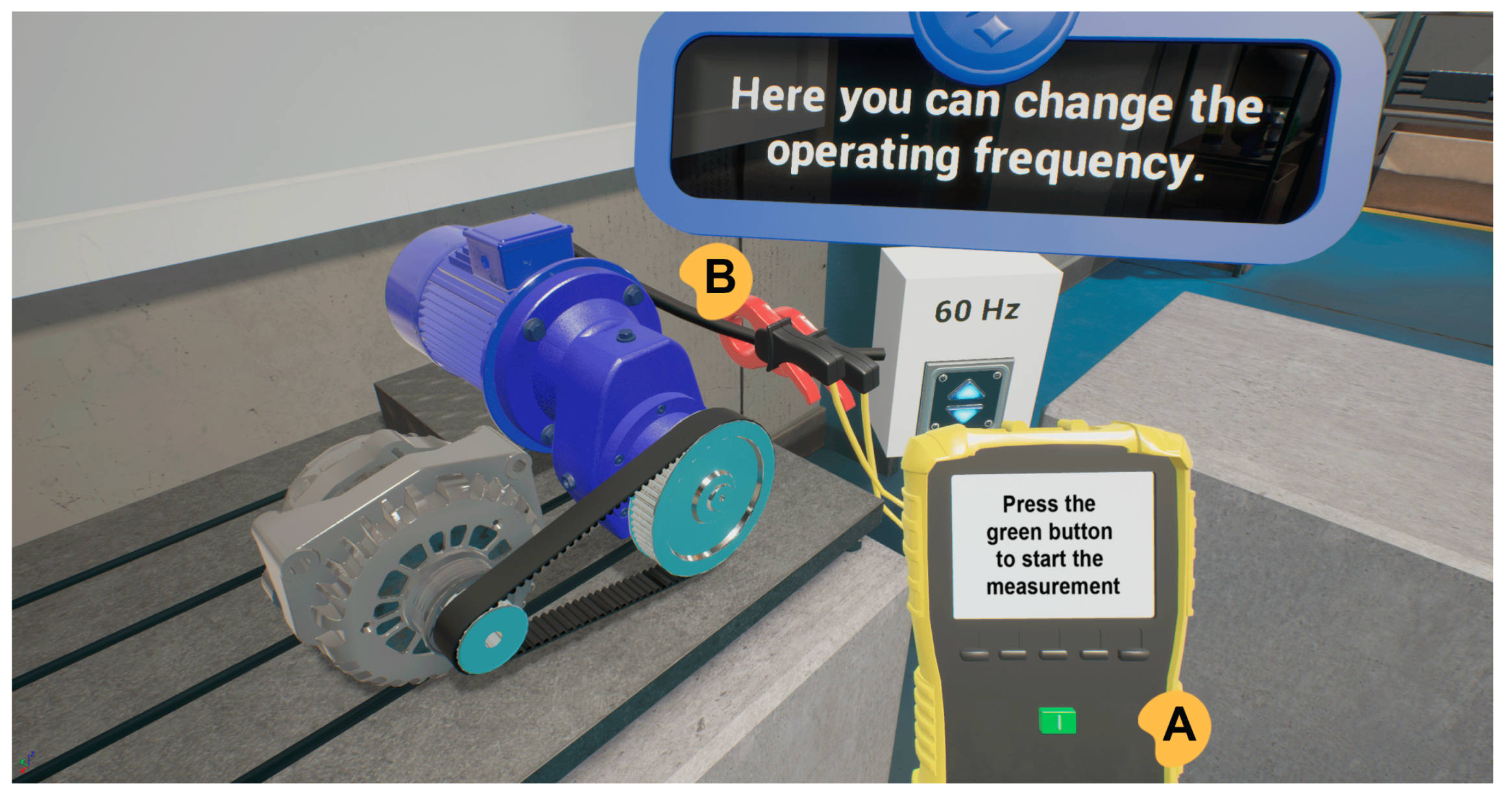
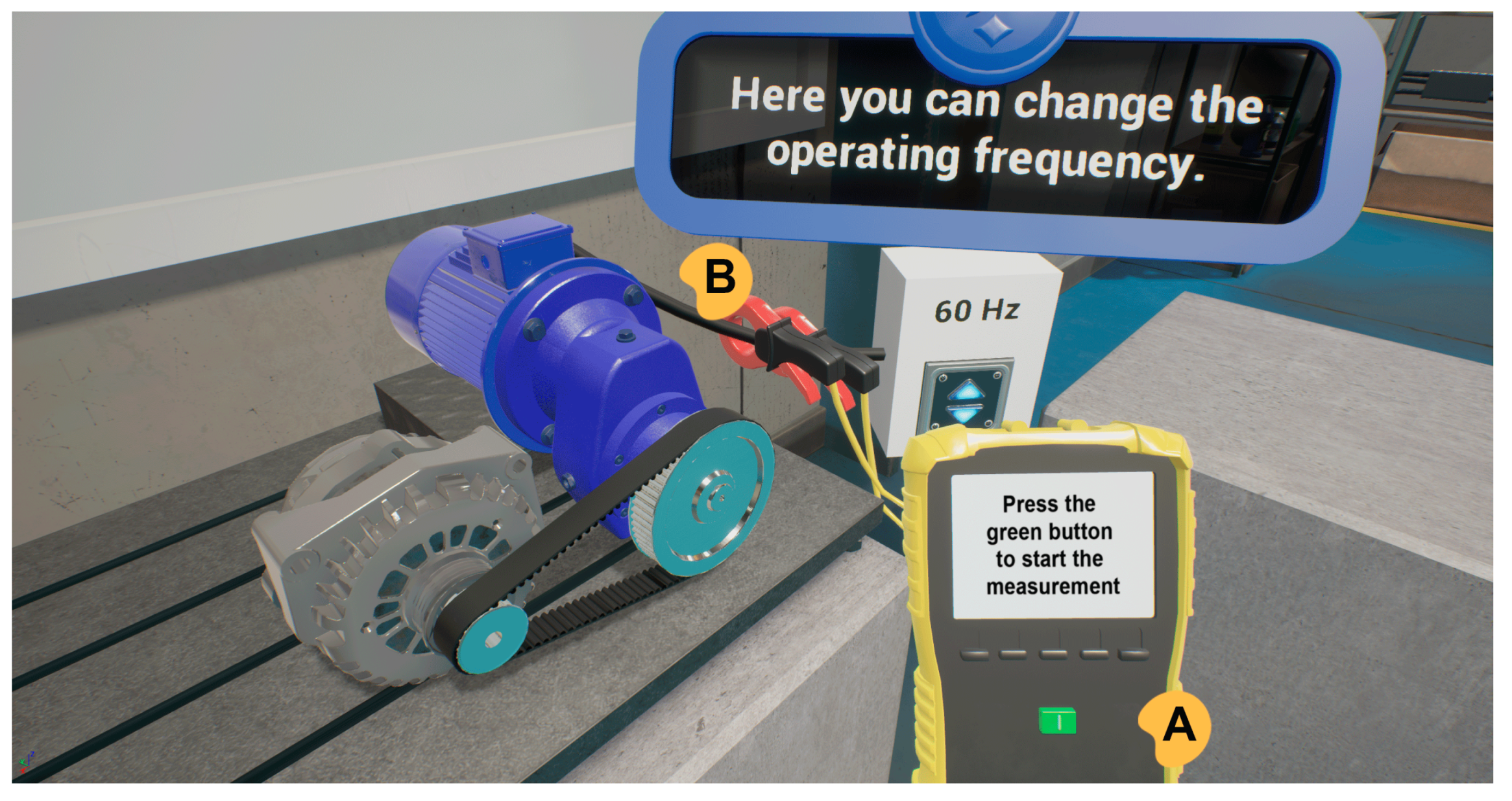
- Introductory tutorial: This module incorporates new elements for interaction as the tasks that the user is expected to perform become more complex. At the following levels, the user will have to interact with user interfaces (UI) in order to select different faults to be simulated. Likewise, the user learns to use a device for the measurement of electrical signals (mainly current) as seen in Figure 5A, together with the clamp accessory that can quickly measure the current, as shown in Figure 5B;
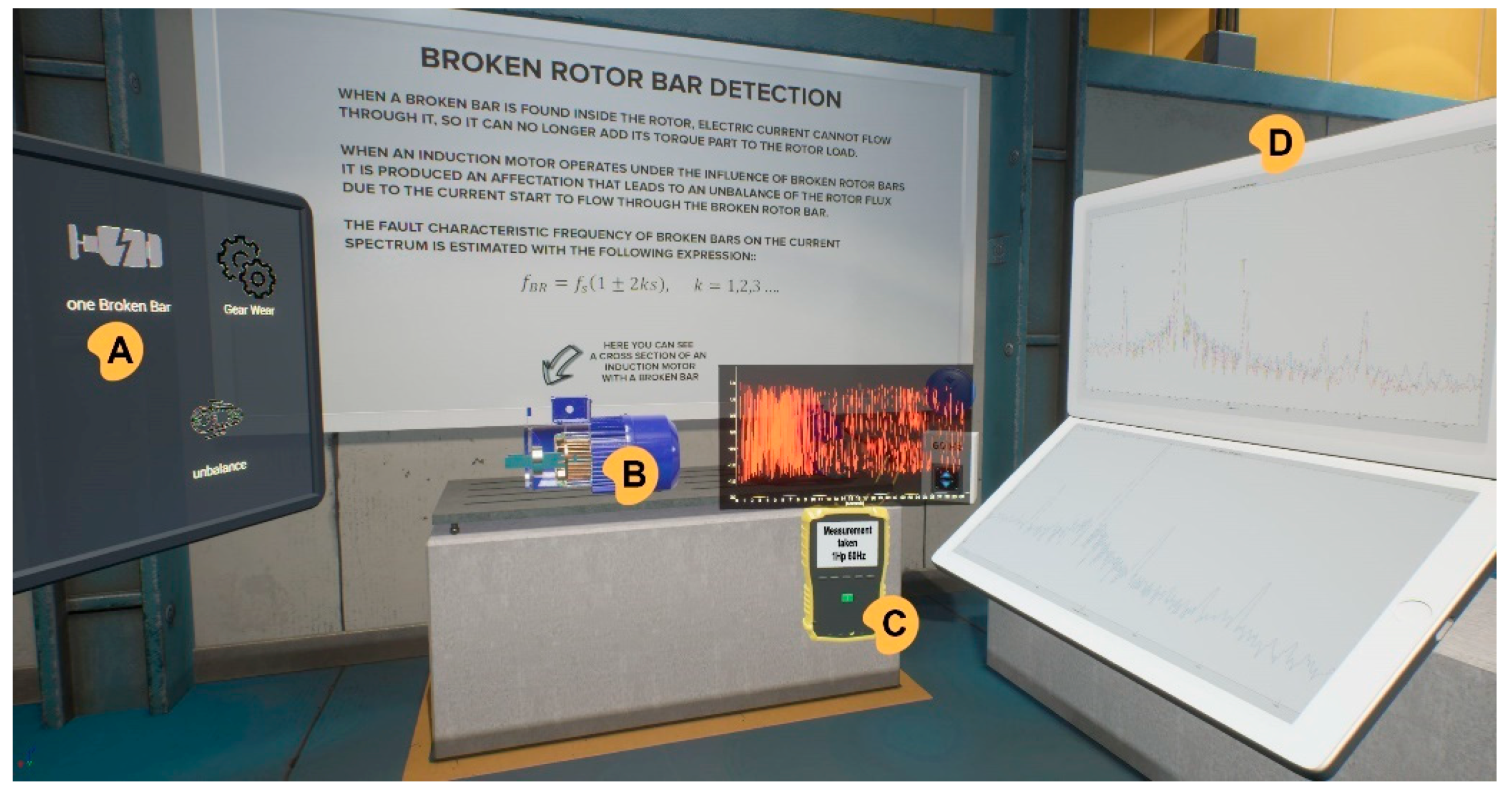
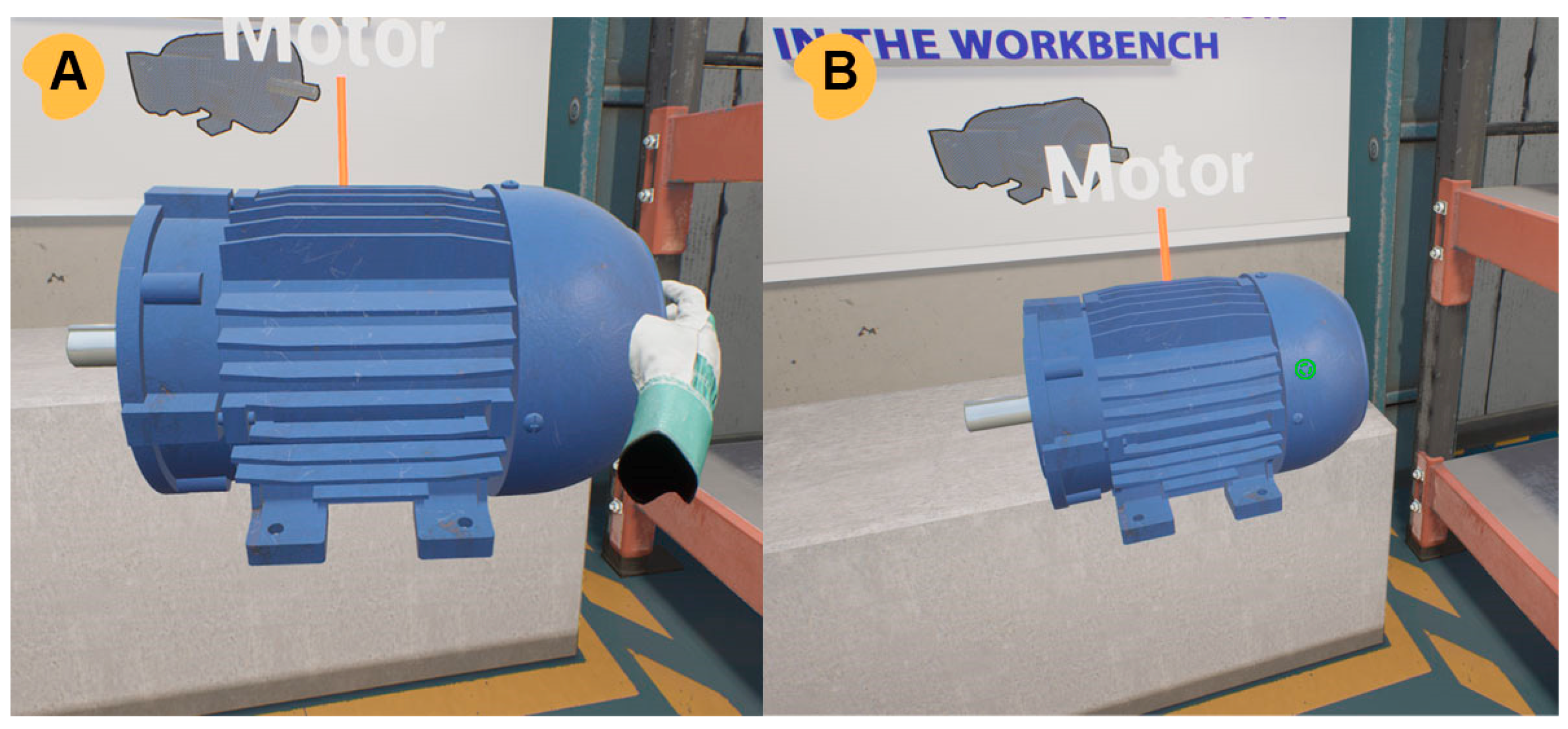
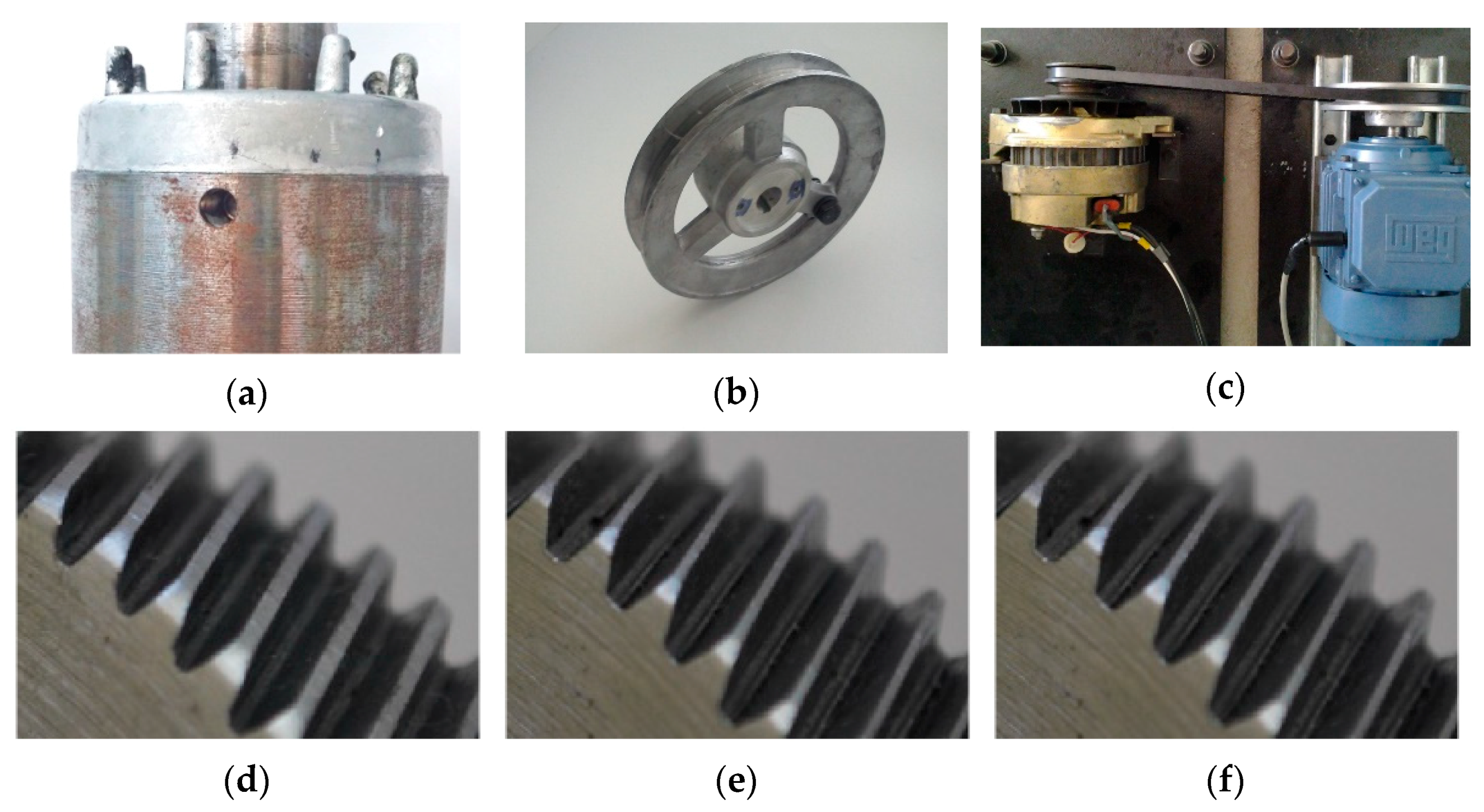
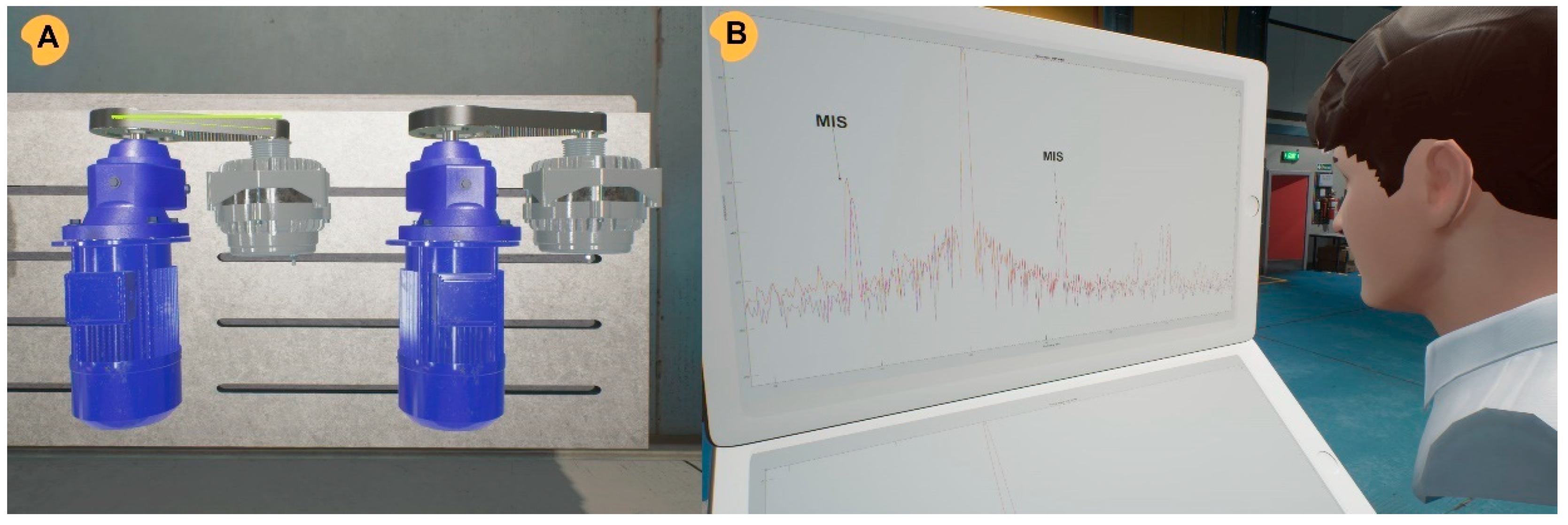
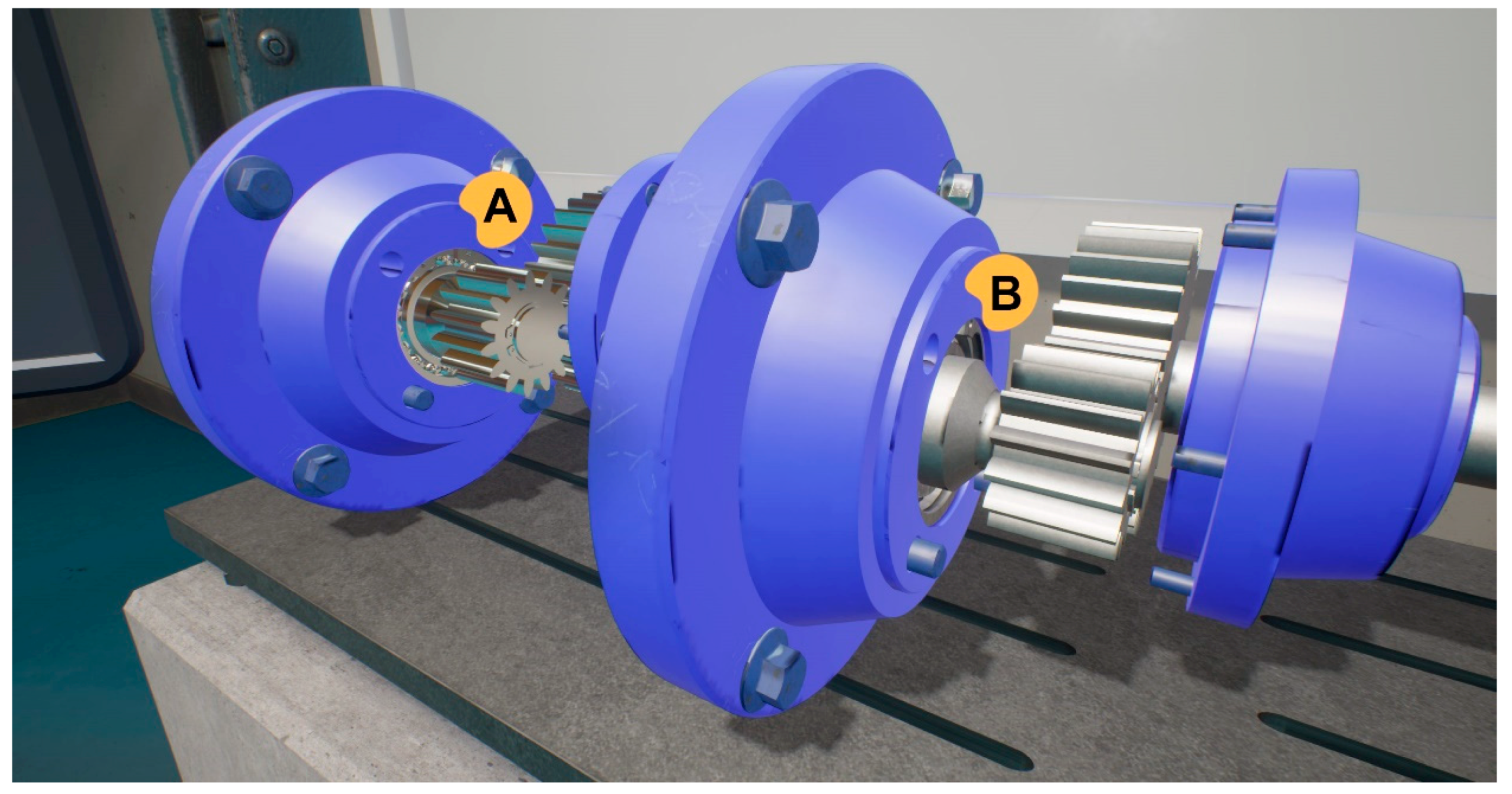
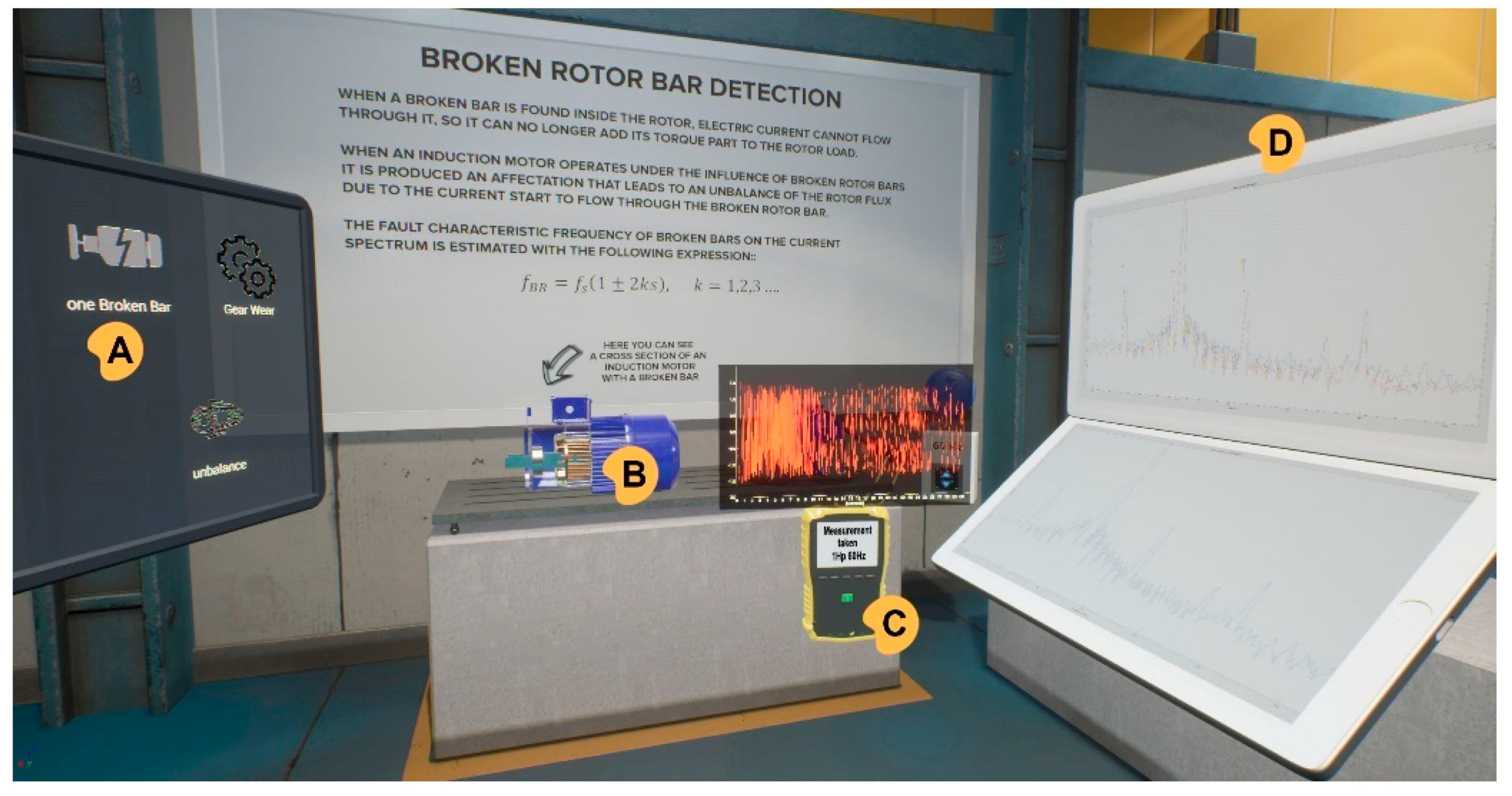
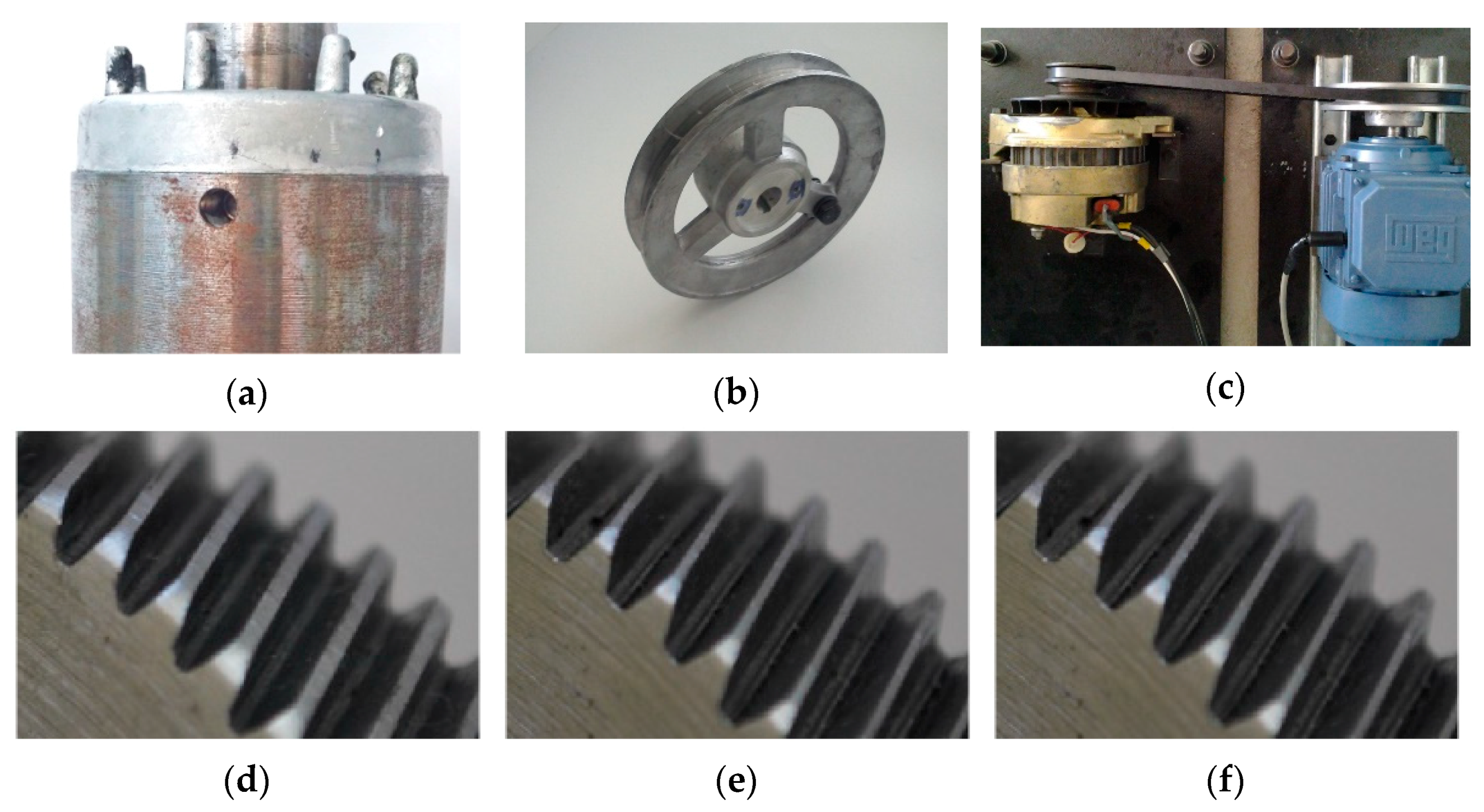
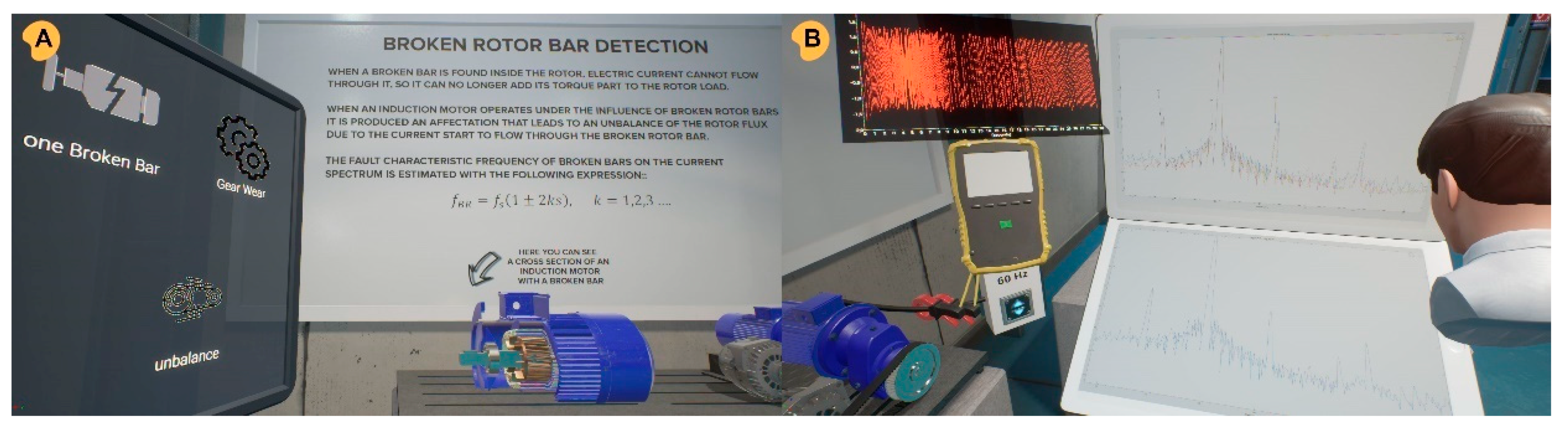
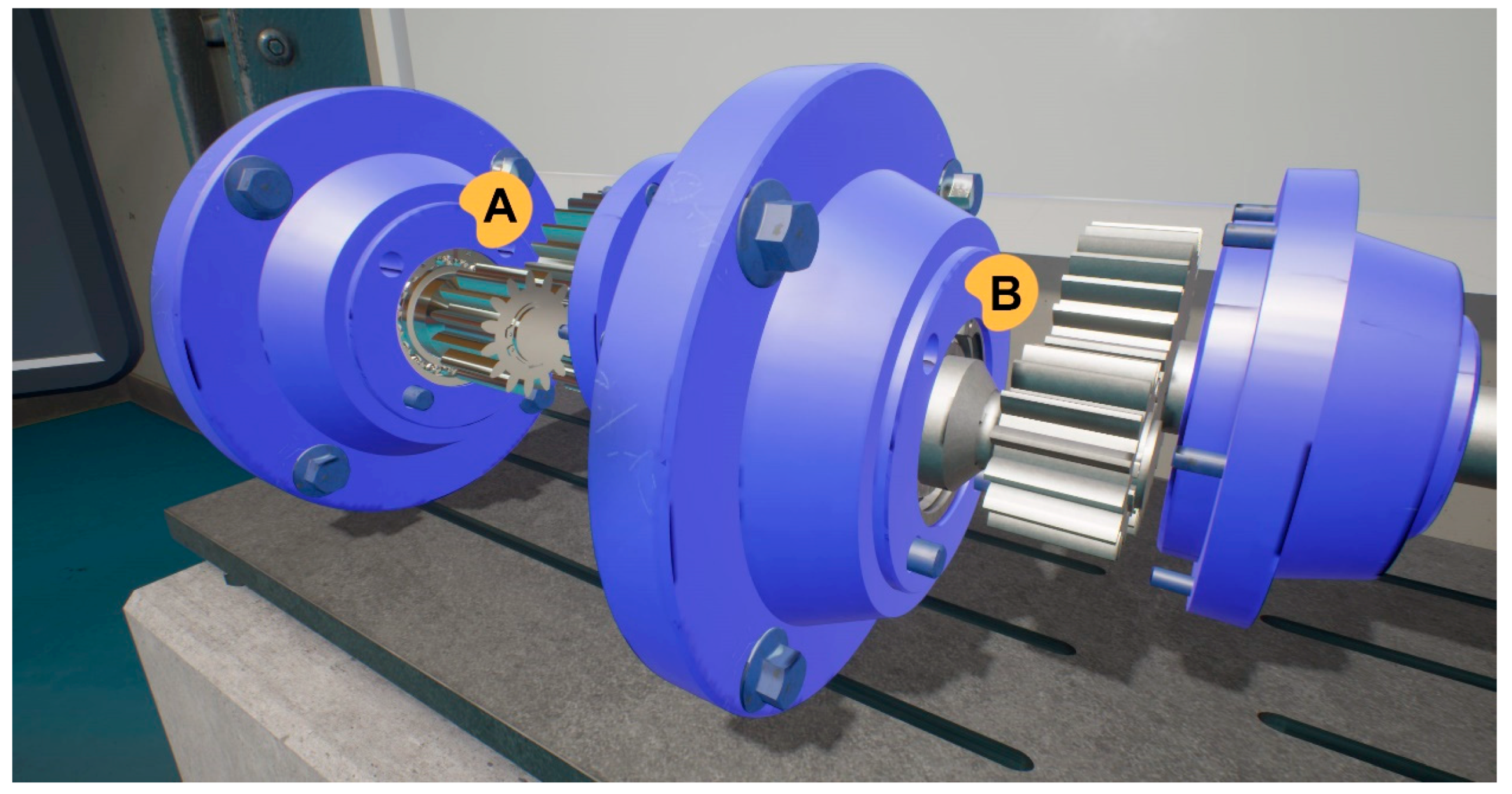
- Analyze induction motor faults: In this phase, the user can be trained in the detection of different types of faults. In front of the user on the workbench is a system composed of an induction motor and an alternator coupled to a pulley and belt system. Using the left panel, users can select the type of fault they want to learn and how to detect it. The user can choose to simulate failures of broken bars in the induction motor, misalignments and unbalances between the induction motor and the alternator, and gearing wear (uniform gradual wear on gear teeth 25%, 50% and 75%). Once the user selects a fault in the left panel, illustrated in Figure 6A, an exploded view of the object is displayed for detailed observation of the fault, as can be seen in Figure 6B. This view is immensely useful in these contexts, as these faults are normally inside a part or in an inaccessible area and are therefore not immediately visible. The whiteboard shows relevant information on the type of fault and how to detect it. By using the measurement device, the power quality of the induction motor can be analyzed, as can be seen in Figure 6C. If the user has correctly configured the measuring device, it receives the raw signal and can display it in real time. Then, the user can examine the signal and process it by applying the fast Fourier transform to the induction motor current signature to obtain the frequency spectrum and to locate the fault-related frequency components. Additionally, the users can export the raw data at any time after capture to apply further processing to the data provided in this virtual tool. With the processed signal, the user can learn in the left side panel to detect indications in the signal that reveal the presence of the fault, as can be seen in Figure 6D. Raw data were taken from real benches and experimental data [42,43] from a real experimental bench, used to evaluate different failure conditions in the induction motor and gearing. Each fault condition was individually evaluated under different frequency values that are programmed in the frequency inverter (12 Hz, 30 Hz, 60 Hz). The user has a frequency inverter available to adjust the frequency, where the frequency to be simulated can be selected at any time. The duration of the data is 30 s, where the first 10 s correspond to the start-up transient (acceleration ramp from 0 to 10 s), and the remaining 20 s belong to the steady state of the motor. The users can remain at this level as long as desired and perform the necessary tests and comparisons between different types of failure to consolidate their knowledge.
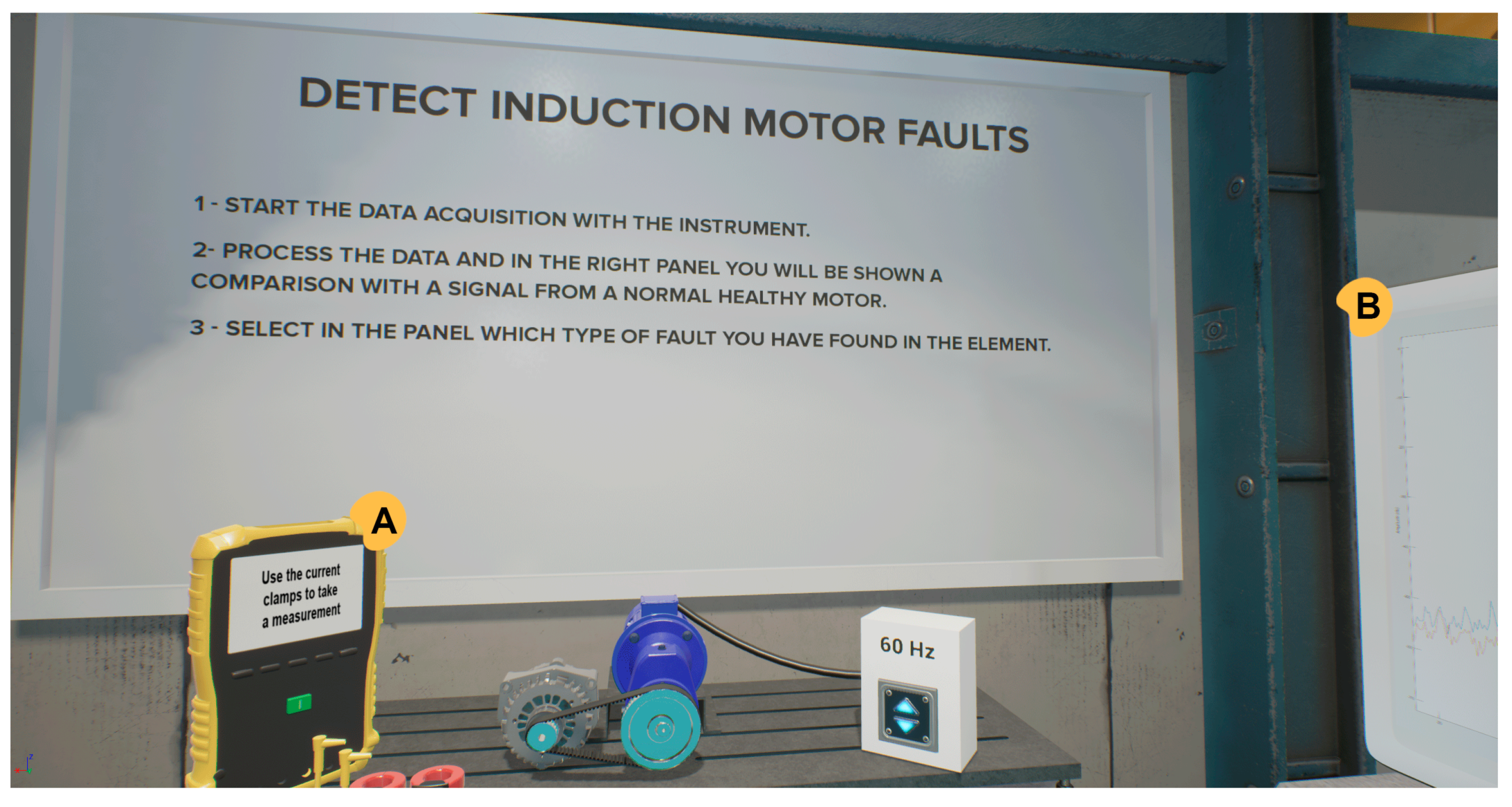
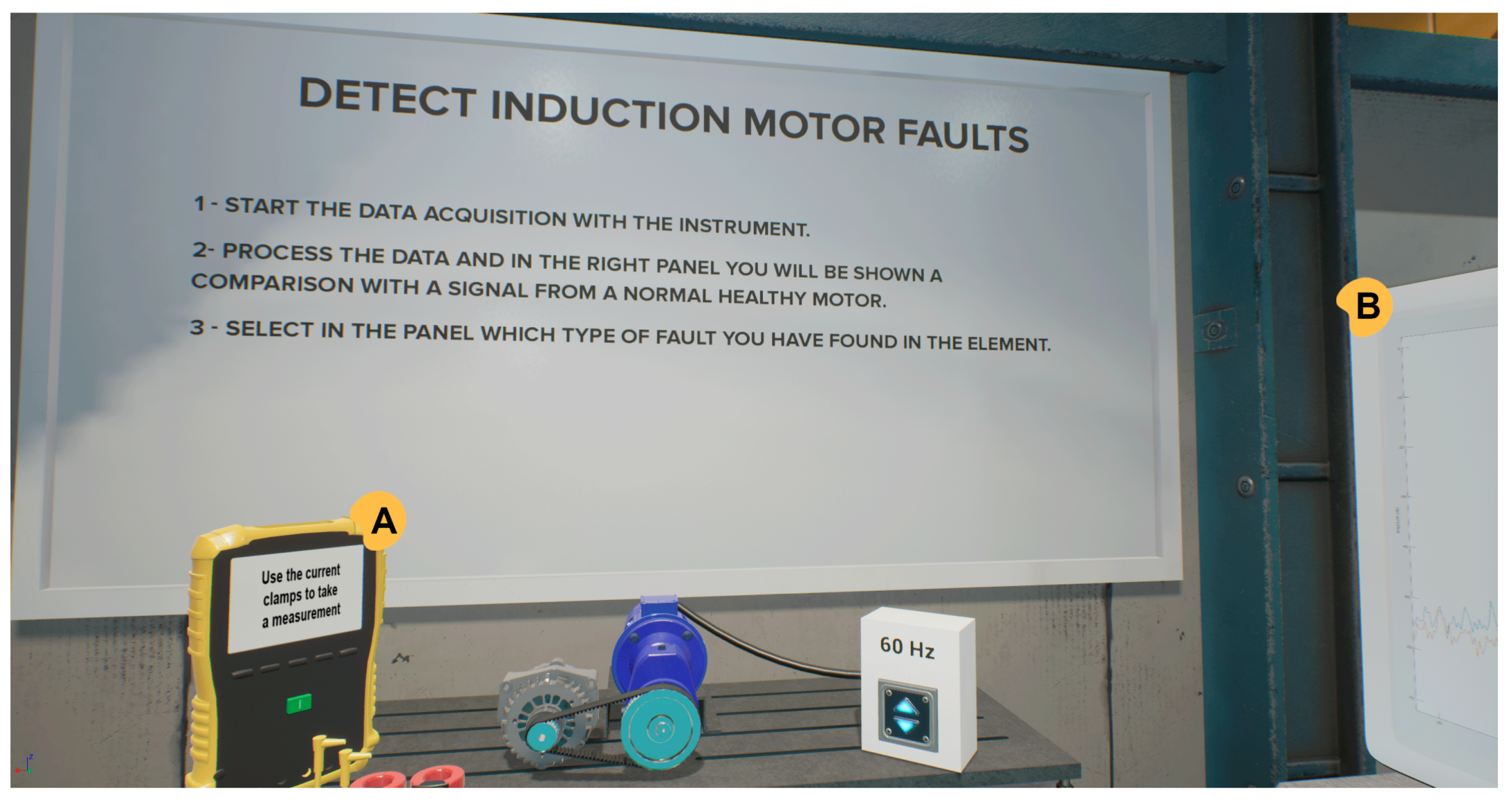
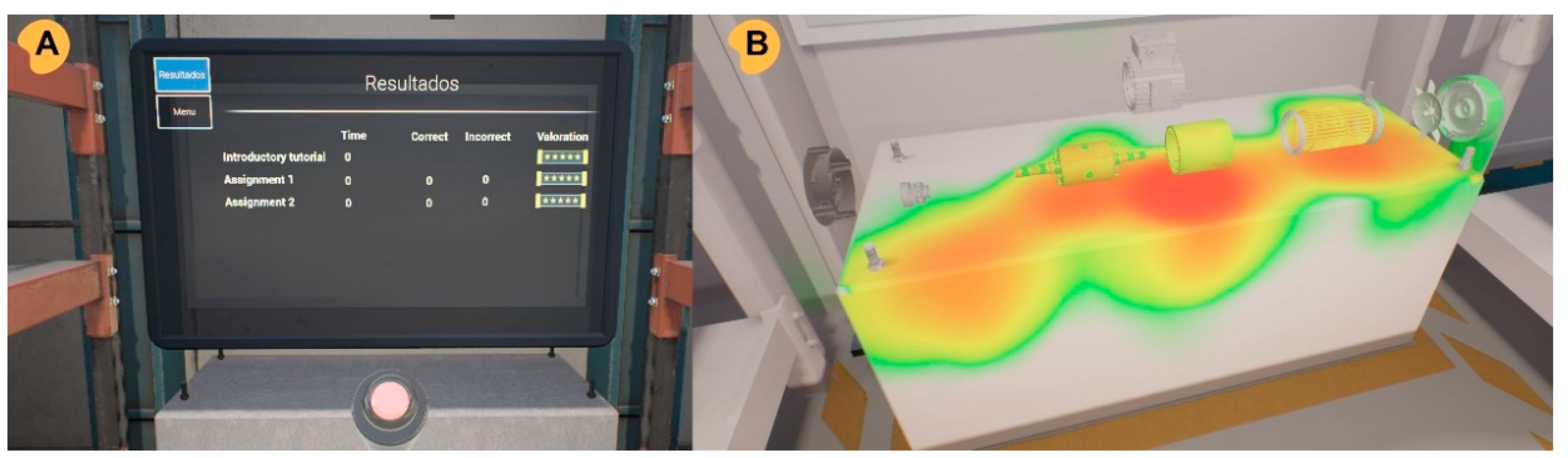
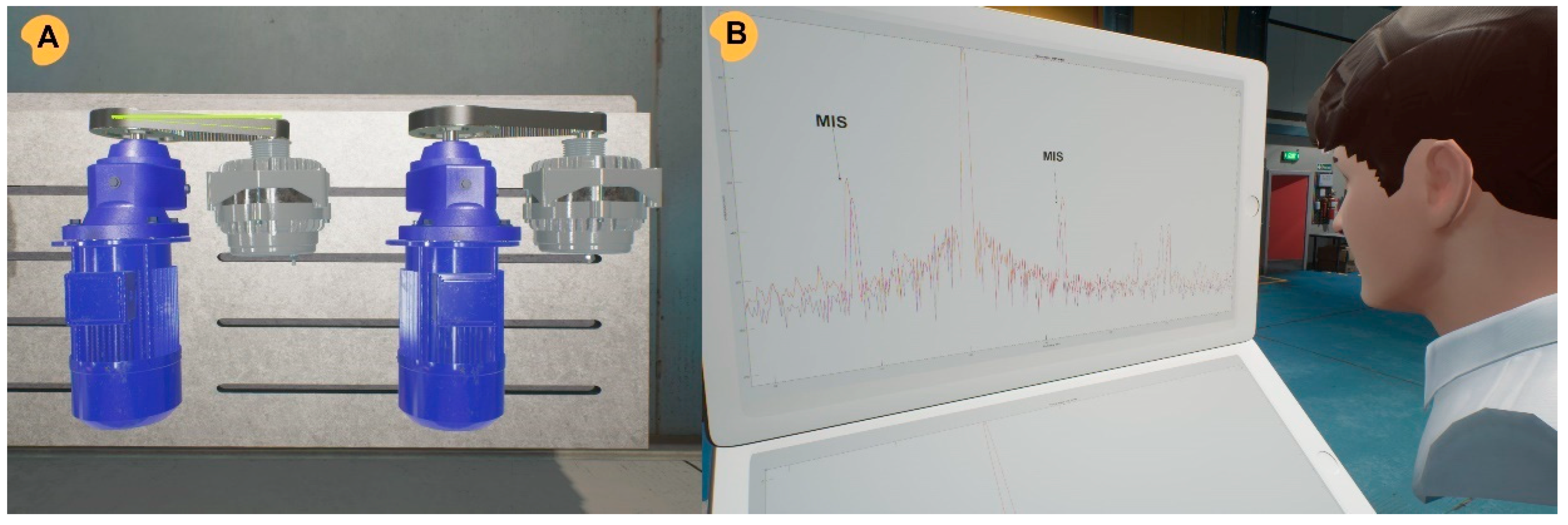
- Detect induction motor faults: At this level, the user will have to apply the knowledge acquired and should be able to detect which of the possible failures (broken bars, gradual wear, misalignments and unbalances) are randomly generated in the motor arrangement. The process is the same as the one used in practice, but this time without the detailed help panels. The process starts with data acquisition (Figure 7A)and its processing, and according to this data, the user will have to decide what type of failure the system is simulating by comparing it to a signal from a normal component (Figure 7B).
Evaluation and Analysis of User Performance Module
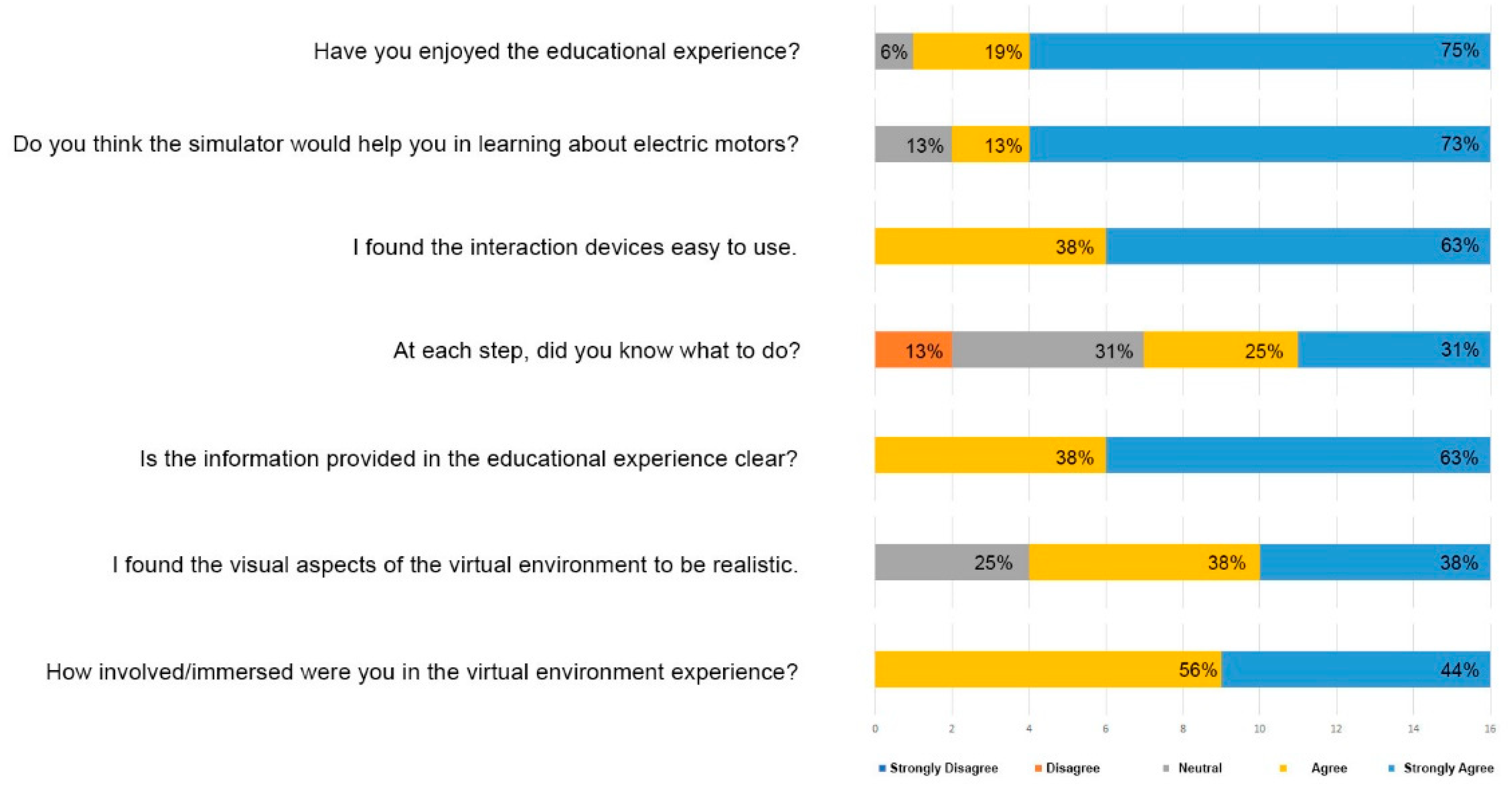
5. Application Validation and User Testing of the VR-Tool Application
6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Checa, D.; Bustillo, A. A review of immersive virtual reality serious games to enhance learning and training. Multimed. Tools Appl. 2020, 79, 5501–5527. [Google Scholar] [CrossRef] [Green Version]
- Lele, A. Virtual reality and its military utility. J. Ambient Intell. Humaniz. Comput. 2013, 4, 17–26. [Google Scholar] [CrossRef]
- Pallavicini, F.; Argenton, L.; Toniazzi, N.; Aceti, L.; Mantovani, F. Virtual Reality Applications for Stress Management Training in the Military. Aerosp. Med. Hum. Perform. 2016, 87, 1021–1030. [Google Scholar] [CrossRef] [PubMed]
- Checa, D.; Martínez, K.; Osornio-Ríos, R.; Bustillo, A. Virtual Reality opportunities in the reduction of occupational hazards in industry 4.0. DYNA 2021, 96, 620–626. [Google Scholar] [CrossRef]
- Gawlik-Kobylińska, M.; MacIejewski, P.; Lebiedź, J.; Wysokińska-Senkus, A. Factors Affecting the Effectiveness of Military Training in Virtual Reality Environment. In Proceedings of the PervasiveHealth: Pervasive Computing Technologies for Healthcare, Oxford, UK, 11–13 February 2020. [Google Scholar]
- Choni, Y.; Dardymov, A. Advantages and “pitfalls” of applying virtual laboratory works in technology education. In Proceedings of the AIP Conference Proceedings, Erode, India, 21–22 November2019; Volume 2195. [Google Scholar]
- Valdez, M.T.; Ferreira, C.M.; Martins, M.J.M.; Barbosa, F.P.M. 3D virtual reality experiments to promote electrical engineering education. In Proceedings of the 2015 International Conference on Information Technology Based Higher Education and Training (ITHET), Lisbon, Portugal, 11–13 June 2015; pp. 1–4. [Google Scholar]
- Singh, G.; Mantri, A.; Sharma, O.; Kaur, R. Virtual reality learning environment for enhancing electronics engineering laboratory experience. Comput. Appl. Eng. Educ. 2021, 29, 229–243. [Google Scholar] [CrossRef]
- Mikropoulos, T.A.; Natsis, A. Educational virtual environments: A ten-year review of empirical research (1999–2009). Comput. Educ. 2011, 56, 769–780. [Google Scholar] [CrossRef]
- Stapleton, A.J. Serious Games: Serious Opportunities. In Proceedings of the Australian Game Developers’ Conference, Melbourne, Australia, 2–4 December 2004. [Google Scholar]
- González Campos, J.S.; Sánchez-Navarro, J.; Arnedo-Moreno, J. An empirical study of the effect that a computer graphics course has on visual-spatial abilities. Int. J. Educ. Technol. High. Educ. 2019, 16, 41. [Google Scholar] [CrossRef] [Green Version]
- Arabul, F.K.; Senol, I.; Oner, Y. Performance analysis of axial-flux induction motor with skewed rotor. Energies 2020, 13, 4991. [Google Scholar] [CrossRef]
- Choudhary, A.; Goyal, D.; Shimi, S.L.; Akula, A. Condition Monitoring and Fault Diagnosis of Induction Motors: A Review. Arch. Comput. Methods Eng. 2019, 26, 1221–1238. [Google Scholar] [CrossRef]
- Bonet-Jara, J.; Quijano-Lopez, A.; Morinigo-Sotelo, D.; Pons-Llinares, J. Sensorless speed estimation for the diagnosis of induction motors via mcsa. Review and commercial devices analysis†. Sensors 2021, 21, 5037. [Google Scholar] [CrossRef]
- Liu, Y.; Bazzi, A.M. A review and comparison of fault detection and diagnosis methods for squirrel-cage induction motors: State of the art. ISA Trans. 2017, 70, 400–409. [Google Scholar] [CrossRef]
- Karami, M.; Mariun, N.B.; Ab-Kadir, M.Z.A.; Misron, N.; Mohd Radzi, M.A. Motor Current Signature Analysis-based Non-invasive Recognition of Mixed Eccentricity Fault in Line Start Permanent Magnet Synchronous Motor. Electr. Power Compon. Syst. 2021, 49, 133–145. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Sanchez, D.G.; Robalino-Lopez, A.; Robalino-Lopez, P.; Alarcon-Ortiz, A.; Garcia, M.V. A scoping review on virtual reality-based industrial training. Appl. Sci. 2020, 10, 8224. [Google Scholar] [CrossRef]
- Ayala García, A.; Galván Bobadilla, I.; Arroyo Figueroa, G.; Pérez Ramírez, M.; Muñoz Román, J. Virtual reality training system for maintenance and operation of high-voltage overhead power lines. Virtual Real. 2016, 20, 27–40. [Google Scholar] [CrossRef]
- Roldán, J.J.; Crespo, E.; Martín-Barrio, A.; Peña-Tapia, E.; Barrientos, A. A training system for Industry 4.0 operators in complex assemblies based on virtual reality and process mining. Robot. Comput. Integr. Manuf. 2019, 59, 305–316. [Google Scholar] [CrossRef]
- Müller, D.; Ferreira, J.M.M. MARVEL: A mixed reality learning environment for vocational training in mechatronics. In Proceedings of the T.E.L. ’03 Proceedings: International Conference on Technology-Enhanced Learning, Milan, Italy, November 2004. [Google Scholar]
- Travassos Valdez, M.; Machado Ferreira, C.; Martins, M.J.M.; Maciel Barbosa, F.P. Virtual labs in electrical engineering education-The VEMA environment. In Proceedings of the ITHET 2014—13th International Conference on Information Technology Based Higher Education and Training, York, UK, 11–13 September 2014. [Google Scholar]
- Perez-Ramirez, M.; Arroyo-Figueroa, G.; Ayala, A. The use of a virtual reality training system to improve technical skill in the maintenance of live-line power distribution networks. Interact. Learn. Environ. 2021, 29, 527–544. [Google Scholar] [CrossRef]
- Kamińska, D.; Zwoliński, G.; Wiak, S.; Petkovska, L.; Cvetkovski, G.; Barba, P.D.; Mognaschi, M.E.; Haamer, R.E.; Anbarjafari, G. Virtual Reality-Based Training: Case Study in Mechatronics. Technol. Knowl. Learn. 2021, 26, 1043–1059. [Google Scholar] [CrossRef]
- Ibrahim, N.S.I.; Akin, E. Virtual Reality For Electrical Machine. Int. J. Sci. Res. Manag. 2021, 9, 586–596. [Google Scholar] [CrossRef]
- Cvetkovski, G.; Petkovska, L.; Digalovski, M.; Celeska, M.; Kamińska, D.; Firych-Nowacka, A.; Wiak, S.; Sapiński, T.; Lefik, M.; Zwoliński, G.; et al. Virtual Reality as a Tool for Electrical Machines Assembling and Testing. In Proceedings of the 7th International Symposium on Applied Electromagnetics SAEM 18, Podčetrtek, Slovenia, 17–20 June 2018. [Google Scholar]
- Abich, J.; Parker, J.; Murphy, J.S.; Eudy, M. A review of the evidence for training effectiveness with virtual reality technology. Virtual Real. 2021, 25, 919–933. [Google Scholar] [CrossRef]
- Checa, D.; Miguel-Alonso, I.; Bustillo, A. Immersive virtual-reality computer-assembly serious game to enhance autonomous learning. Virtual Real. 2021. [Google Scholar] [CrossRef]
- Hassan, O.E.; Amer, M.; Abdelsalam, A.K.; Williams, B.W. Induction motor broken rotor bar fault detection techniques based on fault signature analysis—A review. IET Electr. Power Appl. 2018, 12, 895–907. [Google Scholar] [CrossRef]
- Asad, B.; Vaimann, T.; Belahcen, A.; Kallaste, A.; Rassõlkin, A.; Iqbal, M.N. Broken rotor bar fault detection of the grid and inverter-fed induction motor by effective attenuation of the fundamental component. IET Electr. Power Appl. 2019, 13, 2005–2014. [Google Scholar] [CrossRef]
- Garcia-Calva, T.A.; Morinigo-Sotelo, D.; Garcia-Perez, A.; Camarena-Martinez, D.; de Jesus Romero-Troncoso, R. Demodulation Technique for Broken Rotor Bar Detection in Inverter-Fed Induction Motor Under Non-Stationary Conditions. IEEE Trans. Energy Convers. 2019, 34, 496–1503. [Google Scholar] [CrossRef]
- Verma, A.K.; Sarangi, S.; Kolekar, M.H. Experimental investigation of misalignment effects on rotor shaft vibration and on stator current signature. J. Fail. Anal. Prev. 2014, 14, 125–138. [Google Scholar] [CrossRef]
- Ewert, P. The application of the bispectrum analysis to detect the rotor unbalance of the induction motor supplied by the mains and frequency converter. Energies 2020, 13, 3009. [Google Scholar] [CrossRef]
- Buttussi, F.; Chittaro, L. Effects of different types of virtual reality display on presence and learning in a safety training scenario. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1063–1076. [Google Scholar] [CrossRef]
- Jensen, L.; Konradsen, F. A review of the use of virtual reality head-mounted displays in education and training. Educ. Inf. Technol. 2018, 23, 1515–1529. [Google Scholar] [CrossRef] [Green Version]
- Molina-Carmona, R.; Pertegal-Felices, M.L.; Jimeno-Morenilla, A.; Mora-Mora, H. Virtual Reality learning activities for multimedia students to enhance spatial ability. Sustainability 2018, 10, 1074. [Google Scholar] [CrossRef] [Green Version]
- Salah, A.A.; Dorrell, D.G.; Guo, Y. A review of the monitoring and damping unbalanced magnetic pull in induction machines due to rotor eccentricity. IEEE Trans. Ind. Appl. 2019, 55, 2569–2580. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Application of Spectral and Wavelet Analysis of Stator Current to Detect Angular Misalignment in PMSM Drive Systems. Power Electron. Drives 2021, 6, 42–60. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Delgado-Prieto, M.; Ortega-Redondo, J.A.; Osornio-Rios, R.A.; Romero-Troncoso, R.D.J. Multiple-Fault Detection Methodology Based on Vibration and Current Analysis Applied to Bearings in Induction Motors and Gearboxes on the Kinematic Chain. Shock Vib. 2016, 2016, 5467643. [Google Scholar] [CrossRef]
- Jin, X.; Cheng, F.; Peng, Y.; Qiao, W.; Qu, L. Drivetrain gearbox fault diagnosis: Vibration-and current-based approaches. IEEE Ind. Appl. Mag. 2018, 24, 56–66. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.A. Gear tooth surface damage fault detection using induction machine stator current space vector analysis. IEEE Trans. Ind. Electron. 2015, 62, 1866–1878. [Google Scholar] [CrossRef]
- Bloom, B.S. Taxonomy of Educational Objectives: The Classification of Educational Goals, 1st ed.; Longman Group: Harlow, UK, 1956. [Google Scholar]
- Juez-Gil, M.; Saucedo-Dorantes, J.J.; Arnaiz-González, Á.; López-Nozal, C.; García-Osorio, C.; Lowe, D. Early and extremely early multi-label fault diagnosis in induction motors. ISA Trans. 2020, 106, 367–381. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Jaen-Cuellar, A.Y.; Delgado-Prieto, M.; Romero-Troncoso, R. de J.; Osornio-Rios, R.A. Condition monitoring strategy based on an optimized selection of high-dimensional set of hybrid features to diagnose and detect multiple and combined faults in an induction motor. Meas. J. Int. Meas. Confed. 2021, 178, 109404. [Google Scholar] [CrossRef]
- Checa, D.; Gatto, C.; Cisternino, D.; De Paolis, L.T.; Bustillo, A. A Framework for Educational and Training Immersive Virtual Reality Experiences. In Augmented Reality, Virtual Reality, and Computer Graphics; De Paolis, L.T., Bourdot, P., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 220–228. [Google Scholar]
- Tcha-Tokey, K.; Christmann, O.; Loup-Escande, E.; Richir, S. Proposition and Validation of a Questionnaire to Measure the User Experience in Immersive Virtual Environments. Int. J. Virtual Real. 2016, 16, 33–48. [Google Scholar] [CrossRef]
- Roussos, M.; Johnson, A.; Moher, T.; Leigh, J.; Vasilakis, C.; Barnes, C. Learning and Building Together in an Immersive Virtual World. Presence Teleoperators Virtual Environ. 1999, 8, 247–263. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Time (min) | Learning Objective | Design Guidelines | Evaluation Criteria |
|---|---|---|---|---|
| A Level 1 | 10 |
|
|
|
| A Level 2 | 10 |
|
|
|
| A Level 3 | 15 |
|
|
|
| B Level 1 | 10 |
|
|
|
| B Level 2 | 30 |
|
|
|
| B Level 3 | 15 |
|
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Checa, D.; Saucedo-Dorantes, J.J.; Osornio-Rios, R.A.; Antonino-Daviu, J.A.; Bustillo, A. Virtual Reality Training Application for the Condition-Based Maintenance of Induction Motors. Appl. Sci. 2022, 12, 414. https://doi.org/10.3390/app12010414
Checa D, Saucedo-Dorantes JJ, Osornio-Rios RA, Antonino-Daviu JA, Bustillo A. Virtual Reality Training Application for the Condition-Based Maintenance of Induction Motors. Applied Sciences. 2022; 12(1):414. https://doi.org/10.3390/app12010414
Chicago/Turabian StyleCheca, David, Juan José Saucedo-Dorantes, Roque Alfredo Osornio-Rios, José Alfonso Antonino-Daviu, and Andrés Bustillo. 2022. "Virtual Reality Training Application for the Condition-Based Maintenance of Induction Motors" Applied Sciences 12, no. 1: 414. https://doi.org/10.3390/app12010414
APA StyleCheca, D., Saucedo-Dorantes, J. J., Osornio-Rios, R. A., Antonino-Daviu, J. A., & Bustillo, A. (2022). Virtual Reality Training Application for the Condition-Based Maintenance of Induction Motors. Applied Sciences, 12(1), 414. https://doi.org/10.3390/app12010414