
Development and Evaluation of the Traction Characteristics of a Crawler EOD Robot




Abstract
1. Introduction
2. State of the Art
2.1. The Functions of a Crawler Mobile Robot
2.2. Justification for the Use of a Crawler Mobile Robot for EOD Actions
2.3. Features of Crawler Mobile Robots
2.4. Requirements for Crawler Mobile Robots, Resulting from an Anonymized Market Study
3. Geometric Configuration of the Crawler Propeller
3.1. Conditions Regarding the Crossing of the Step Type Obstacle
3.2. Conditioning Imposed by the Average Pressure on the Ground
3.3. Geometric Conditions Imposed by the Execution of the Turn
3.4. Static Stability Study of the Crawler Engine
4. Simulation Singularity Crossing Obstacles
4.1. Simulation of the Slope Ascent
4.2. Simulation of Crossing the Step-Type Obstacle
4.3. Simulation of Crossing the Step-Type Obstacle with Recurdyn
5. Testing and Evaluation Propulsion Systems
5.1. Testing and Evaluation on the Stand
5.2. Engine Testing by Suspension Test
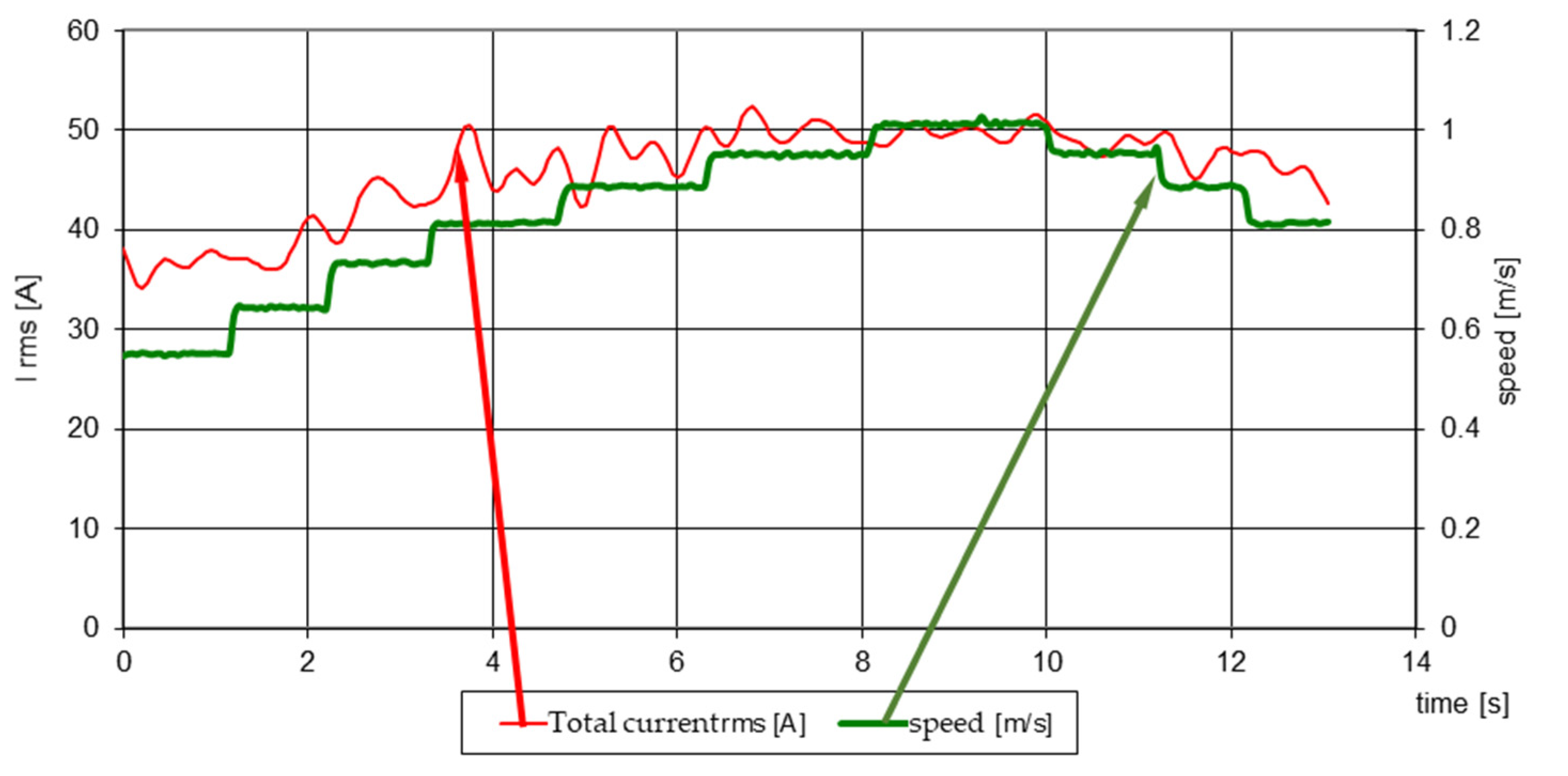
5.3. Testing and Evaluation of Rectilinear Displacement Capacity
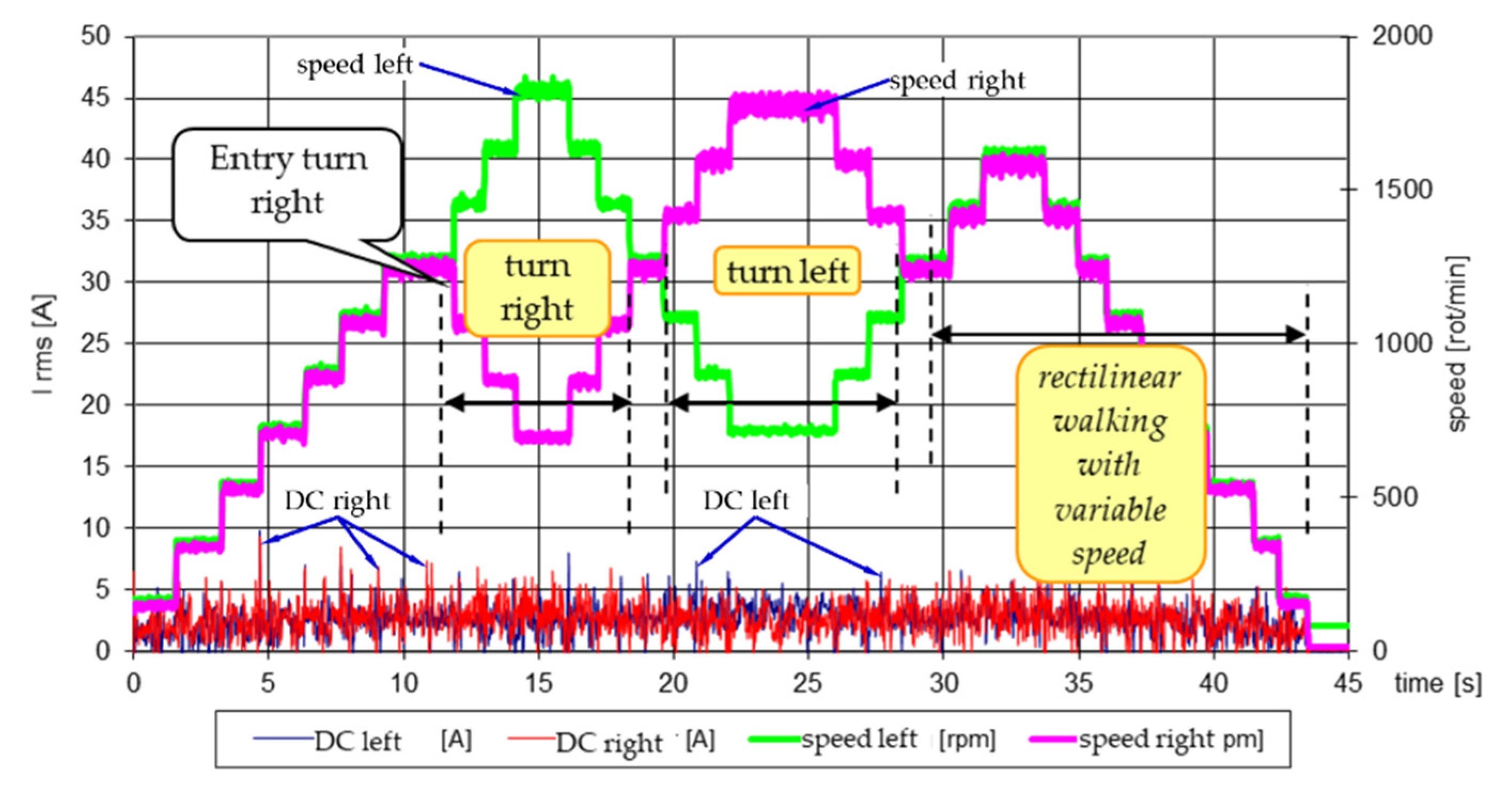
5.4. Testing and Evaluation of the Ability to Make the Turn
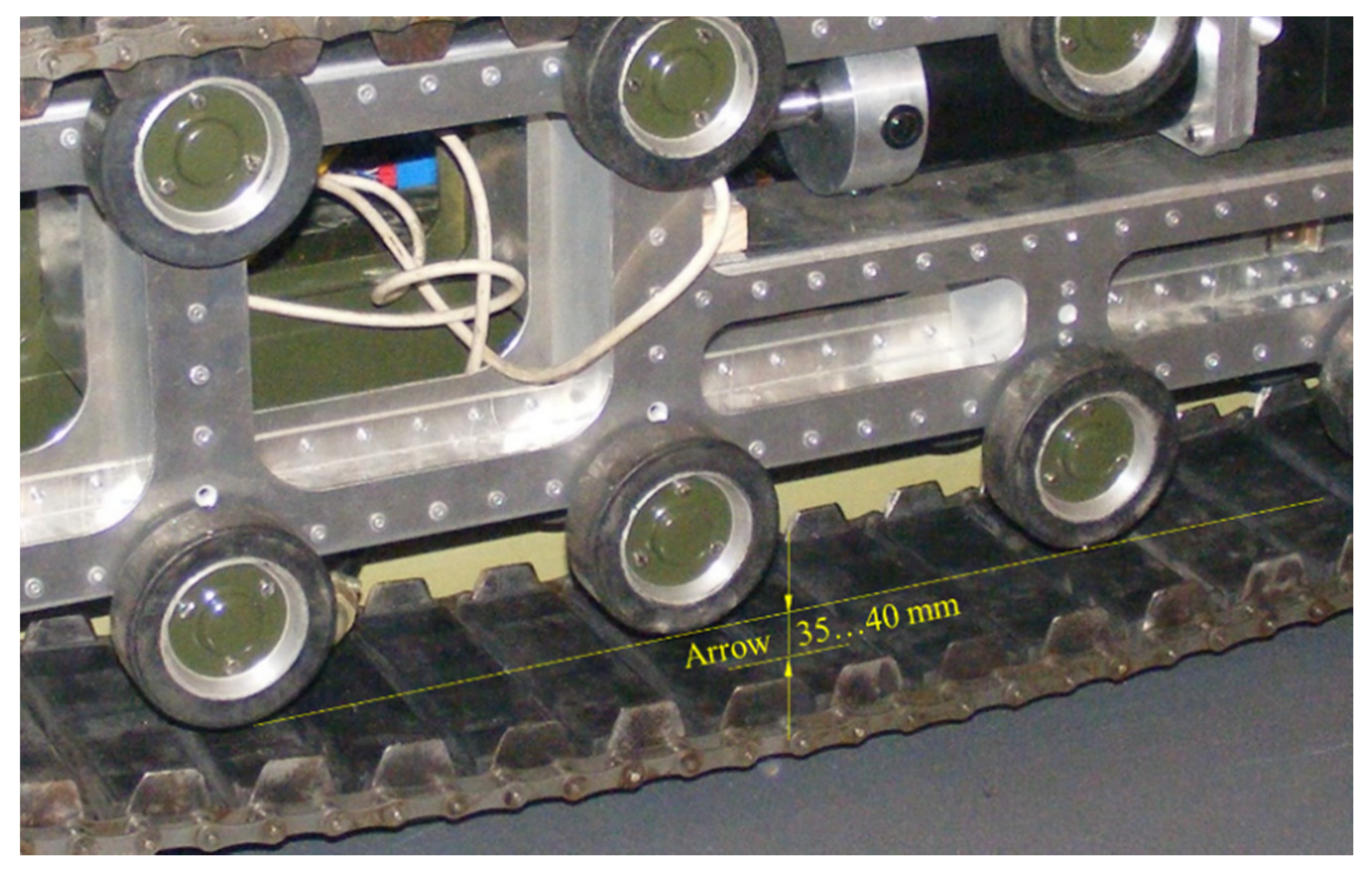
5.5. Experimental Research on the Ability to Approach Obstacles
6. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Luxton, A.; Marinov, M. Terrorist Threat Mitigation Strategies for the Railways. Sustainability 2020, 12, 3408. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Alawad, H.; Cotruta, S. A Decision Framework for Managing the Risk of Terrorist Threats at Rail Stations Interconnected with Airports. Safety 2018, 4, 36. [Google Scholar] [CrossRef]
- Kanji, A. Framing Muslims in the “War on Terror”: Representations of Ideological Violence by Muslim versus Non-Muslim Perpetrators in Canadian National News Media. Religions 2018, 9, 274. [Google Scholar] [CrossRef]
- Gibbs, J.P. Conceptualization of Terrorism. Am. Sociol. Rev. 1989, 54, 329–340. [Google Scholar] [CrossRef]
- Eikenberry, K.W. Thoughts on Unconventional Threats and Terrorism; Working Group on Foreign Policy and Grand Strategy, Hoover Institution, Stanford University: Stanford, CA, USA, 2014. [Google Scholar]
- Available online: https://ec.europa.eu/echo/files/about/COMM_PDF_SEC_2010_1626_F_staff_working_document_en.pdf (accessed on 18 February 2021).
- National Research Council. Technology Development for Army Unmanned Ground Vehicles. ISBN: 0-309-08620-5. Available online: http://www.nap.edu/catalog/10592.html (accessed on 22 February 2021).
- Available online: https://www.unodc.org/e4j/en/terrorism/module-4/key-issues/defining-terrorism.html (accessed on 17 March 2021).
- Cassese, A. The Multifaceted Criminal Notion of Terrorism in International Law. JICJ 2006, 4, 933–958. [Google Scholar] [CrossRef]
- Dewulf, S. Human Rights in the Criminal Code: A Critique of the Curious Implementation of the EU and Council of Europe Instruments on Combating and Preventing Terrorism in Belgian Criminal Legislation. EJC CLCJ 2014, 22, 33–57. [Google Scholar] [CrossRef]
- Liem, M.; van Buuren, J.; de Roy van Zuijdewijn, J.; Schönberger, H.; Bakker, E. European Lone Actor Terrorists Versus “Common”. Homicide Stud. 2018, 22, 45–69. [Google Scholar] [CrossRef]
- Available online: https://www2.ohchr.org/english/bodies/chr/special/counter-terrorism.htm (accessed on 15 March 2021).
- Duquet, N.; Goris, K. Firearms Acquisition by Terrorists in Europe, Research Findings and Policy Recommendations of Project SAFTE; Flemish Peace Institute: Brussels, Belgium, 2018; ISBN 9789078864912. [Google Scholar]
- Available online: https://govinfo.library.unt.edu/911/report/911Report_Exec.htm (accessed on 2 March 2021).
- Czop, A.; Hacker, K.; Murphy, J.; Zimmerman, T. Low-cost explosive ordnance disposal robot using off-the-shelf parts. In Proceedings of the Unmanned Ground Vehicle Technology VII, Defence and Security, Orlando, FL, USA, 27 May 2005; Volume 5804. [Google Scholar] [CrossRef]
- Available online: https://www.un.org/sc/ctc/wp-content/uploads/2017/03/CTED-Trends-Report-March-2017-Final.pdf (accessed on 10 March 2021).
- Van Moore, A., Jr. Radiological and nuclear terrorism: Are you prepared? Am. Coll. Radiol. 2004, 1, 54–58. [Google Scholar] [CrossRef]
- Available online: https://www.ouvry.com/en/nrbce-terrorist-chemical-weapons-attacks/ (accessed on 2 March 2021).
- Maynard, R.M.; Tetley, T.D. Bioterrorism: The lung under attack. 2004, 59, 188–189. [Google Scholar] [CrossRef][Green Version]
- Available online: https://www.un.org/sc/ctc/wp-content/uploads/2019/01/Compendium_of_Good_Practices_Compressed.pdf (accessed on 2 March 2021).
- Paulius, D.; Sun, Y. A Survey of Knowledge Representation in Service Robotics. Robot. Auton. Syst. 2019, 118, 13–30. [Google Scholar] [CrossRef]
- Matuszek, C.; Herbst, E.; Zettlemoyer, L. Learning to parse natural language commands to a robot control system. In Experimental Robotics; Desai, J., Dudek, G., Khatib, O., Kumar, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; Volume 88, pp. 403–415. [Google Scholar]
- Liu, R.; Webb, J.; Zhang, X. Natural-Language-Instructed Industrial Task Execution. In Proceedings of the ASME IDETC/CIE, Charlotte, NC, USA, 21–24 August 2016; p. v01bt02a043. [Google Scholar]
- Tay, N.N.W.; Saputra, A.A.; Botzheim, J.; Kubota, N. Service robot planning via solving constraint satisfaction problem. Robomech. J. 2016, 3, 17. [Google Scholar] [CrossRef]
- Zhang, S.; Sridharan, M.; Wyatt, J.L. Mixed logical inference and probabilistic planning for robots in unreliable worlds. IEEE Trans. Robot. 2015, 31, 699–713. [Google Scholar] [CrossRef]
- Kress-Gazit, H.; Wongpiromsarn, T.; Topcu, U. Correct, reactive robot control from abstraction and temporal logic specifications. IEEE Robot. Autom. Mag. Spec. Issue Form. Methods Robot. Autom. 2011, 18, 65–74. [Google Scholar] [CrossRef]
- Xie, M. Robot Vision: A Holistic View. In Climbing and Walking Robots; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar] [CrossRef]
- Carey, M.W.; Kurz, E.M.; Matte, J.D.; Perrault, T.D. Novel EOD Robot Design with a Dexterous Gripper and Intituitive Teleoperation. In Proceedings of the World Automation Congress 2012, Puerto Vallarta, Mexico, 24–28 June 2012; IEEE: New York, NY, USA, 2012; Volume 1, pp. 463–469. ISBN 9781467344975. [Google Scholar]
- Belanche, D.; Casaló, L.V.; Flavián, C.; Schepers, J. Service robot implementation: A theoretical framework and research agenda. Serv. Ind. J. 2020, 40, 203–225. [Google Scholar] [CrossRef]
- Saputra, R.P.; Rijanto, E. Automatic Giuded Vehicles System and Its Coordination Control for Containers Terminal Logistics Application. Conf. Int. Logist. Semin. Workshop 2012, 2, 4. [Google Scholar]
- Grigore, L.Ș.; Priescu, I.; Grecu, D.L. Inteligența Artificială Aplicată în Sisteme Robotizate Fixe și Mobile; Editura AGIR: Bucuresti, Romania, 2020; p. 703. ISBN 978-973-720-767-8. [Google Scholar]
- Grigore, L.Ș.; Gorgoteanu, D.; Molder, C.; Alexa, O.; Oncioiu, I.; Ștefan, A.; Constantin, D.; Lupoae, M.; Bălașa, R.I. A Dynamic Motion Analysis of a Six-Wheel Ground Vehicle for Emergency Intervention Actions. Sensors 2021, 21, 1618. [Google Scholar] [CrossRef]
- Deng, W.; Zhang, H.; Li, Y.; Gao, F. Research on target recognition and path planning for EOD robot. Int. J. Comput. Appl. Technol. 2018, 57, 325–333. [Google Scholar] [CrossRef]
- Rajan, K.; Saffiotti, A. Towards a science of integrated AI and robotics. Artif. Intell. 2017, 247, 1–9. [Google Scholar] [CrossRef]
- Dudzik, S. Application of the Motion Capture System to Estimate the Accuracy of a Wheeled Mobile Robot Localization. Energies 2020, 13, 6437. [Google Scholar] [CrossRef]
- Russo, M.; Raimondi, L.; Dong, X.; Axinte, D.; Kell, J. Task-oriented optimal dimensional synthesis of robotic manipulators with limited mobility. Robot. Comput. Integr. Manuf. 2021, 69, 102096. [Google Scholar] [CrossRef]
- Sandry, E. Robots and Communication, 1st ed.; Palgrave Macmillan: London, UK, 2015; p. 129. ISBN 978-1-137-46837-6. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, J.; Zhao, F.; Xu, Z.; Liu, Y. A design Method for Multijoint Explosive-Proof Manipulators by Two Motors. Appl. Sci. 2018, 8, 712. [Google Scholar] [CrossRef]
- Jian-Jun, Z.; Ru-Qing, Y.; Wei-Jun, Z.; Xin-Hua, W.; Jun, Q. Research on Semi-Automatic Bomb Fetching for an EOD Robot. Int. J. Adv. Robot. Syst. 2007, 4, 27. [Google Scholar] [CrossRef]
- Chatziparaschis, D.; Lagoudakis, M.G.; Partsinevelos, P. Aerial and Ground Robot Collaboration for Autonomous Mapping in Search and Rescue Missions. Drones 2020, 4, 79. [Google Scholar] [CrossRef]
- Liao, J.-C.; Chen, S.-H.; Zhuang, Z.-Y.; Wu, B.-W.; Chen, Y.-J. Designing and Manufacturing of Automatic Robotic Lawn Mower. Processes 2021, 9, 358. [Google Scholar] [CrossRef]
- Chen, X.; Huang, F.; Zhang, Y.; Chen, Z.; Liu, S.; Nie, Y.; Tang, J.; Zhu, S. A Novel Virtual-Structure Formation Control Design for Mobile Robots with Obstacle Avoidance. Appl. Sci. 2020, 10, 5807. [Google Scholar] [CrossRef]
- Alexa, O.; Coropețchi, I.; Vasile, A.; Oncioiu, I.; Grigore, L.Ș. Considerations for determining the coefficient of inertia masses for a tracked vehicle. Sensors 2020, 20, 5587. [Google Scholar] [CrossRef]
- Niu, J.; Wang, H.; Shi, H.; Pop, N.; Li, D.; Li, S.; Wu, S. Study on structural modeling and kinematics analysis of a novel wheel-legged rescu robot. IJARS 2018, I-17, 17. [Google Scholar] [CrossRef]
- Islam, A.J.; Alam, S.S.; Ahammad, K.T.; Nadim, F.K.; Barua, B. Design, kinematic and performance evaluation of a dual arm bomb disposal robot. In Proceedings of the 2017 3rd EICT, Khulna, Bangladesh, 7–9 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Scalera, L.; Palomba, I.; Wehrle, E.; Gasparetto, A.; Vidoni, R. Natural Motion for Energy Saving in Robotic and Mechatronic Systems. Appl. Sci. 2019, 9, 3516. [Google Scholar] [CrossRef]
- Lei, C.; Chang, F.; Li, S.; Zhang, X. Control System of the Explosive Ordnance Disposal Robot Based on Active Eye-to-Hand Binocular Vision, Artificial Intelligence and Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2011; Volume 7004, ISBN 978-3-642-23895-6. [Google Scholar]
- Available online: https://www.nationaldefensemagazine.org/articles/2019/2/15/harris-provides-eod-robots-to-british-army (accessed on 2 March 2021).
- Yin, Q.; Xiong, Z.; Song, S.; Zhang, G. Modular design method of EOD robot based on genetic algorithm. Int. J. Wirel. Mob. Comput. 2018, 15. [Google Scholar] [CrossRef]
- Available online: https://ceias.nau.edu/capstone/projects/EE/2018/OrdnanceDisposal2/design_subsystems.html (accessed on 2 March 2021).
- Available online: https://www.militarysystems-tech.com/taxonomy/term/78 (accessed on 2 March 2021).
- Yu, J.; Jiang, W.; Luo, Z.; Yang, L. Application of a Vision-Based Single Target on Robot Positioning System. Sensors 2021, 21, 1829. [Google Scholar] [CrossRef]
- Ștefan, A.; Constantin, D.; Grigore, L.Ș. Aspects of kinematics and dynamics of a gripping mechanism. In Proceedings of the 2015 7th ECAI, Bucharest, Romania, 25–27 June 2015; IEEE: New York, NY, USA, 2015; pp. WF1–WF4. [Google Scholar] [CrossRef]
- Available online: https://www.ocean-comms.com.sg/product/portable-xray/ (accessed on 10 March 2021).
- Ceccarelli, M.; Gasparetto, A. Mechanism Design for Robotics. Robotics 2019, 8, 30. [Google Scholar] [CrossRef]
- Toma, Ș.A.; Sebacher, B.; Focșa, A. On Anomalous Deformation Profile Detection through Supervised and Unsupervised Machine Learning. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, L.; Zhao, J.; Kim, K. Cornering Algorithm for a Crawler In-Pipe Inspection Robot. Symmetry 2020, 12, 2016. [Google Scholar] [CrossRef]
- Available online: https://www.antiterrorism.eu/portfolio-posts/expert/ (accessed on 20 March 2021).
- Grigore, L.Ș.; Ileri, R.; Neculăescu, C.; Soloi, A.; Ciobotaru, T.; Vînturiș, A. A class of autonomous robots prepared for unfriendly sunny environment. In Proceedings of the CAR2011—2011 3rd International Asia Conference on Informatics in Control, Automation and Robotics, Xiamen, China, 25–26 June 2011; Volume 646. [Google Scholar]
- Bruch, M.H.; Laird, R.T.; Everett, H.R. Challenges for Deploying Man-Portable Robots into Hostile Environments; Space and Naval Warfare Systems Center: San Diego, CA, USA, 2001. [Google Scholar] [CrossRef]
- Ogorkiewicy, R.M. Technology of Tanks; Jane’s Information Group: Coulsdon, UK, 1991; Volume 1–2, p. 424. ISBN 978-0710605955. [Google Scholar]
- Haueisen, B. Mobility Analysis of Small, Lightweight Robotic Vehicles; Brooke Haueisen: Huntington Beach, CA, USA, 2003; p. 46. [Google Scholar]
- Johnson, C.P. Comparative Analysis of Lightweight Robotic Wheeled and Tracked Vehicle. Ph.D. Dissertation, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 26 April 2012; p. 155. [Google Scholar]
- Gigler, J.K.; Ward, S.M. A simulation model for the prediction of the ground pressure distribution under tracked vehicles. J. Terramechanics 1993, 30, 461–469. [Google Scholar] [CrossRef]










































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | U.M. | Amount |
|---|---|---|
| Fully equipped mobile robot table | kg | 250 |
| Maximum speed on horizontal terrain | m/s | 1 |
| Maximum slope when walking straight | deg | 30 |
| The height of the steps | mm | 150 |
| Average ground pressure | MPa | 0.05 |
| The height of the stepped obstacle crossed | mm | 225 |
| The width of the ditch crossed | mm | 800 |
| Depth of water on hard horizontal ground | mm | 100 |
| Race of turns | mm | continuously variable |
| Minimum turning radius | mm | 0–rotation |
| Travel control | - | wireless |
| The mass of the manipulated object | kg | 25 |
| Range of the manipulator arm | mm | 1000 |
| Rotate the manipulator arm to the side | deg | 30 |
| The gripping length of the gripping mechanism | mm | 150 |
| Arm displacement position | - | folded/extended |
| Omnidirectional video camera for travel | buc. | 2 |
| Video camera for inspection | buc. | 2 |
| Riding the platform while working | - | no |
| Working autonomy | h | 6 |
| Construction type | - | modular |
| Characteristics | U.M. | Amount |
|---|---|---|
| Rear wheel diameter, Drw | mm | 350 |
| Front wheel diameter, Dfw | mm | 350 |
| Wheelbase, Lw | mm | 1200 |
| Distance between front axle and center of gravity, Lcg | mm | 600 |
| Height of the center of gravity relative to the running track, hmg | mm | 650 |
| The mass of the vehicle, m | kg | 250 |
| The weight of the vehicle, mg | N | 2450 |
| Coefficient of adhesion, μ | - | 0.8 |
| h, mm | 50 | 75 | 100 | 125 | 150 |
|---|---|---|---|---|---|
| Normal force at the rear axle wheels, N | 669.2 | 678 | 684 | 687 | 689.8 |
| Minimum adhesion coefficient, μ2, μmin2 | 0.2 | 0.26 | 0.33 | 0.41 | 0.51 |
| Normal force on the front axle wheels, N | 650 | 693 | 741 | 788 | 829.3 |
| Total traction force, N | 2514 | 2514 | 2514 | 2514 | 2171 |
| Limited tensile strength of grip, N | 1070 | 1085 | 1094 | 1100 | 1104 |
| h, mm | 50 | 75 | 100 | 125 | 150 |
|---|---|---|---|---|---|
| Normal force at the rear axle wheels, N | 669.2 | 678 | 684 | 688 | 689.8 |
| Minimum adhesion coefficient, μ2, μmin2 | 0.37 | 0.47 | 0.56 | 0.66 | 0.76 |
| Total traction force, N | 2514 | 2514 | 2514 | 2514 | 2171 |
| Limited tensile strength of grip, N | 1070 | 1085 | 1094 | 1100 | 1104 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grigore, L.Ș.; Oncioiu, I.; Priescu, I.; Joița, D. Development and Evaluation of the Traction Characteristics of a Crawler EOD Robot. Appl. Sci. 2021, 11, 3757. https://doi.org/10.3390/app11093757
Grigore LȘ, Oncioiu I, Priescu I, Joița D. Development and Evaluation of the Traction Characteristics of a Crawler EOD Robot. Applied Sciences. 2021; 11(9):3757. https://doi.org/10.3390/app11093757
Chicago/Turabian StyleGrigore, Lucian Ștefăniță, Ionica Oncioiu, Iustin Priescu, and Daniela Joița. 2021. "Development and Evaluation of the Traction Characteristics of a Crawler EOD Robot" Applied Sciences 11, no. 9: 3757. https://doi.org/10.3390/app11093757
APA StyleGrigore, L. Ș., Oncioiu, I., Priescu, I., & Joița, D. (2021). Development and Evaluation of the Traction Characteristics of a Crawler EOD Robot. Applied Sciences, 11(9), 3757. https://doi.org/10.3390/app11093757