1. Introduction
Wireless communication systems (WCSs) have become an essential part of the infrastructure for exchanging information. However, WCSs are exposed to various threats due to the open nature of wireless media. One of these threats is eavesdropping. Eavesdroppers means malicious receivers that harm innocent users using information on the radio transmission. Since the advent of wireless communication, security to prevent damage caused by eavesdroppers has been considered an important concern.
Computational complexity-based approaches at the application layer (e.g., encryption) have been implemented for security. However, such methods are not suitable for wireless networks that contain devices with low computational power. Physical layer security, which exploits the physical properties of the wireless channel, is another solution. The random nature of the channel makes physical layer security possible. Since Wyner defined the wire-tap channel model and secrecy criterion [
1], a number of researchers have studied this approach to secrecy.
The aforementioned secrecy criterion is often referred to as (physical layer) information-theoretic security. Information-theoretic security defines how much information in a confidential message is revealed to eavesdroppers. However, sometimes the presence of a communication itself should be hidden from eavesdroppers. One example is a covert military communication in a hostile region. Eavesdroppers can recognize the covert operation by detecting the presence of the signal. To evade such threats posed by eavesdroppers, a low probability of detection (LPD) for covert communications has been considered as another secrecy criterion.
Covert communication [
2,
3] has received little attention, relative to its importance. Without covert communications, the physical location of wireless transmitters can be detected by an eavesdropper, owing to the wireless transmission of signals. In such scenarios, the presence of wireless communications should not be easily detectable by hostile eavesdroppers.
Intentional electromagnetic radiation, also called jamming, is another serious threat to the robustness of WCSs. Jamming attacks can disturb ongoing wireless communications by causing additional errors. Jamming attacks can become more destructive if the jammers cooperate with eavesdroppers. A follower jammer [
4] is an example of such cooperation. It first measures the time-frequency band of the target signal and then concentrates its jamming energy onto that band. Covert communication decreases damage by jammers using the eavesdropping-and-jamming strategy by preventing the leakage of system parameters. Thus, to protect the security and robustness of WCSs, covertness and anti-jamming performances are required simultaneously.
A spread spectrum (SS) scheme is one common solution for overcoming jamming attacks in the physical layer. Through this scheme, the bandwidth of band-limited jamming becomes much smaller than that of the communication signals. Furthermore, the scheme makes communication difficult to detect by hiding communication signals under the noise level, thus reducing the threat of eavesdroppers and eavesdropper-aided smart jammers such as follower jammers.
The coded modulation method using Gaussian-distributed code can be a complement to the SS scheme. If the modulated symbols follow a Gaussian distribution, it is difficult for the eavesdropper to distinguish whether there is a communication signal or not without an exact codebook. Furthermore, the legitimate receiver can use the error-correction property of the coding scheme. The idea of real-valued channel coding has been used, and is known as analog coding [
5]. The code can correct sparse errors (e.g., narrowband jamming). Researchers [
6] have studied a generalization of this coding scheme: a complex-field coding using orthogonal frequency-division multiplexing (OFDM). Candes and Tao [
7] proposed a sparse error-correction method for an arbitrary generator matrix, which is a polynomial–time linear programming method unified within a compressive sensing (CS) recovery framework [
8]. Studies motivated by analog coding and many other CS-based anti-jamming approaches have exploited the sparse characteristic of jamming in both the time-frequency [
9,
10] and spatial domains [
11]. Thus, analog coding can be applied to anti-jamming communication.
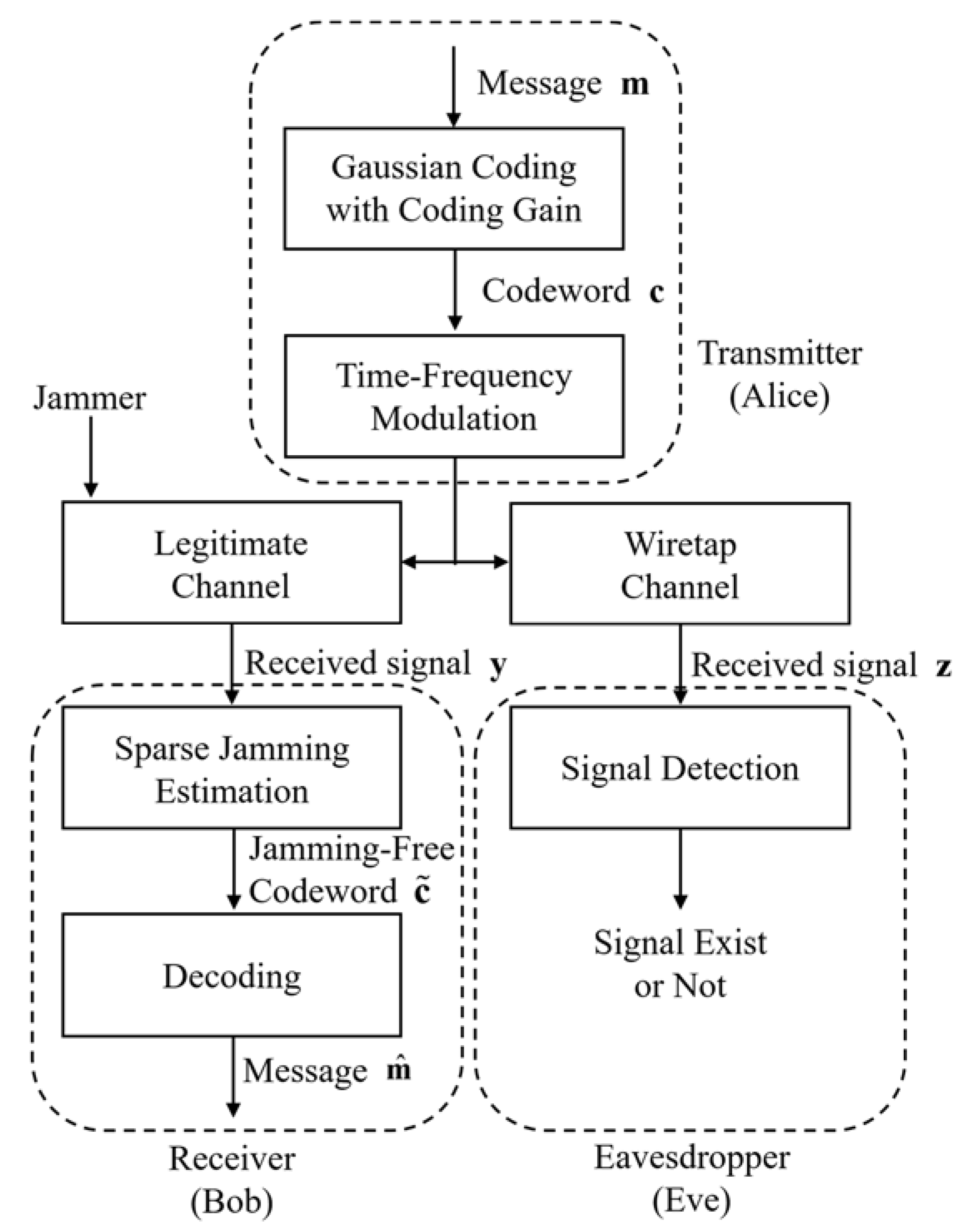
In this paper, we consider wireless communications under a jammer and eavesdropper scenario, for example, the electronic warfare scenario depicted in
Figure 1. The proposed system transmits information messages on a coded Gaussian signal through a wireless channel that is attacked by an eavesdropper, called Eve in this paper, and a jammer. We consider two types of jammers. The first type is a blind jammer, which radiates a partial-band or pulse jamming signal without knowing when or where a target communication signal exists. The second type is a follower jammer, which detects an ongoing communication signal and then radiates a jamming signal to interfere with this ongoing signal. We assume that Eve is not aware of the exact codebook and time-frequency band of the target system. Suppose that there is no secret information shared between the transmitter and the receiver. Then the achievability of covert communication depends entirely on the channel quality difference between the receiver and Eve, which is difficult for communicators to control. Thus, many studies assume that the transmitter and the receiver share some secret information, such as a codebook [
2,
12] or spreading sequence [
13,
14]. This secret information is often time-varying to prevent information leakage [
15]. One practical example is a frequency-hopping radio that exploits the exact time-frequency band of a signal as secret information.
In this paper, we propose a novel covert anti-jamming communication system based on a noise-like Gaussian-coded time-frequency modulation, as illustrated in
Figure 2. To provide covertness to a communication signal, we propose a time-frequency modulation scheme. It is difficult to distinguish a signal generated using the proposed scheme from Gaussian noise. To provide robust anti-jamming performance, we propose two receiver algorithms that estimate and remove the jamming signal from the received signal by exploiting the sparse nature of the jamming signal.
The main contributions of this paper are as follows:
We propose a covert anti-jamming communication system based on Gaussian-coded time-frequency modulation. We consider the communication system that is exposed to the threat of the jammer and Eve. Previous studies on analog coding [
5,
6,
7,
9,
10,
11] have not considered the threat of jammers and eavesdroppers simultaneously. We designed a coding and modulation method for a transmitter to achieve anti-jamming and covert communication simultaneously. For a receiver, to estimate and remove jamming, we propose two novel sparse jamming estimation (SJE) algorithms, i.e., greedy SJE (GSJE) and Bayesian SJE (BSJE), which are described as Algorithm 1 and Algorithm 2, respectively.
For the proposed Gaussian coding scheme, we aimed to develop a real-valued coding scheme in which a coding gain is provided. Previous studies on analog coding [
5,
7] have considered analog messages. In this paper, we show that the coding method cannot provide a coding gain for finite-field messages. As a countermeasure, we introduce two methods to achieve coding gain even when the finite-field messages are encoded. The first method is a two-stage coding approach, applying finite-field coding and linear Gaussian coding sequentially. In this method, the overall coding gain is equivalent to that of the finite-field coding used in the first stage. Another coding method is a codebook method that uses a pregenerated codebook rather than a linear operation on message vectors. We demonstrate the existence of a coding gain through numerical results that compare the bit error rate (BER) performance of the proposed system under jamming and the uncoded direct-sequence spread spectrum (DSSS) without jamming.
We show the undetectability of the signal transmitted from the proposed system. The signal of the proposed system is compared to that of a conventional binary phase-shift keying (BPSK)-DSSS scheme. For this comparison, we considered Eve to be an energy-detecting eavesdropper that can distinguish the communication signal from noise using the maximum likelihood (ML) method. The detection capability of Eve increases as the signal-to-noise ratio (SNR) and false alarm probability increases. Our results demonstrate that the proposed system offers significantly better undetectability than the BPSK-DSSS scheme in such critical cases. Thus, the proposed method is superior when Eve is the most threatening.
The remainder of this paper is organized as follows. In
Section 2,
Section 3 and
Section 4, we describe the proposed covert anti-jamming communication system as depicted in
Figure 2. Specifically, we discuss the signal design required to achieve covertness and anti-jamming performance in
Section 2. In
Section 3, we describe the time-frequency modulation method. In
Section 4, we present an analysis of the undetectability of the proposed system and compare it with that of a conventional binary system.
Section 5 discusses issues related to implementation, such as modulation methods and computational complexity. In
Section 6, we numerically evaluate the BER performance of the proposed system. Finally,
Section 7 summarizes our results and concludes the paper.
2. Signal Design
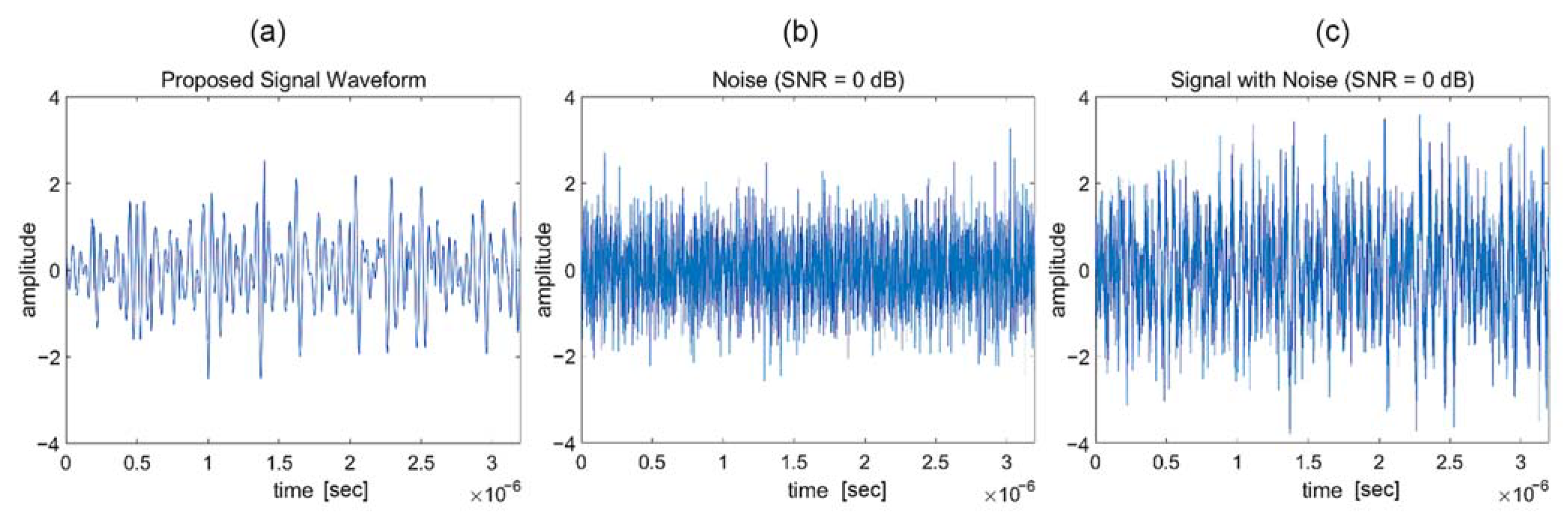
In this section, we describe the proposed signal design. In the proposed system, the codeword alphabet consists of Gaussian-distributed real numbers rather than a finite-field alphabet. The transmitted Gaussian codeword appears as additive white Gaussian noise (AWGN) to Eve. In contrast, the receiver who knows the exact codebook can detect the transmitted codeword even with a significantly low SNR setting.
Figure 3a illustrates the time-domain signal waveform of the proposed system at the 0 dB SNR setting. The waveform with noise in
Figure 3c is hardly distinguishable from the AWGN in
Figure 3b. A detailed analysis of this undetectability is presented in
Section 4. In this section, we consider two encoding methods used to construct such codewords. We first introduce the simplest method, linear block coding (LBC), as proposed in previous studies [
5,
7]. Then, we present the limitations of that method and propose two methods to address these limitations.
2.1. Codeword Generation
A binary message vector is encoded into a real-valued codeword vector , where is the set of real numbers. Each element of the codeword, i.e., each time-frequency symbol, follows a Gaussian distribution. Here, the encoding can be any function that includes a redundancy to the codeword. The redundancy can be exploited to estimate the jamming and correct the channel-induced errors.
In the previous work of Candes and Tao [
7], LBC-like encoding of the real-valued message was studied. That is,
was previously investigated. As it is a simple method, we can use it as a codeword generation method. We call this method Gaussian-LBC. Let us define the probability density function (PDF) for a Gaussian random variable with a mean
and variance
as
. In the Gaussian-LBC, a codeword vector becomes the product of a generator matrix and a message vector:
where
is the
-dimensional message vector,
is the generator matrix of which the entries follow
, and
is the codeword vector. Because the method is similar to LBC in finite fields, one can define concepts and notations corresponding to the parity-check matrix, syndromes, and error correction. However, error correction using syndromes in real-valued code is a nonlinear pattern recognition problem that has no simple solution for an arbitrary
[
5]. A linear programming solution to this real-valued syndrome decoding problem was described in [
7]. The solution has been widely accepted for several other sparse signal recovery (SSR) problems, under the name of CS [
8]. Numerous algorithms have been proposed [
16,
17,
18,
19] to achieve this solution.
However, we require another approach with Gaussain-LBC. This is because
cannot fully exploit the characteristics of the digital message; thus, one cannot obtain an adequate coding gain. In the following
Section 2.2., we discuss an alternate design of
to obtain the coding gain.
2.2. Gaussian Coding with Coding Gain
The Gaussian-LBC method has a limitation in that the method considers only the real-valued message case. However, for modern communication systems that transmit a variety of finite-field messages, the encoding of a finite-field message must be considered. Unfortunately, the direct application of the Gaussian-LBC method to finite-field messages is inefficient because there is no actual coding gain. In finite-field coding, the coding gain is defined by how much the minimum Hamming distance between two codeword vectors increases when compared to that between message vectors. This is because the finite-field decoder maps the input vectors to the closest codeword in terms of the Hamming distance. In contrast, the coding gain of a real-valued code cannot be defined by the Hamming distance because the closeness of real-valued codewords to non-sparse noise is meaningless. Instead, the Euclidean distance has to be used for real-valued code. It can be noted that the minimum Euclidean distance is constant before and after the Gaussian-LBC, i.e.,
where
is the transpose operator for the vector/matrix and
for large
. To benefit from coding gain, we considered two approaches: concatenation coding and the codebook method.
2.2.1. Concatenation Coding
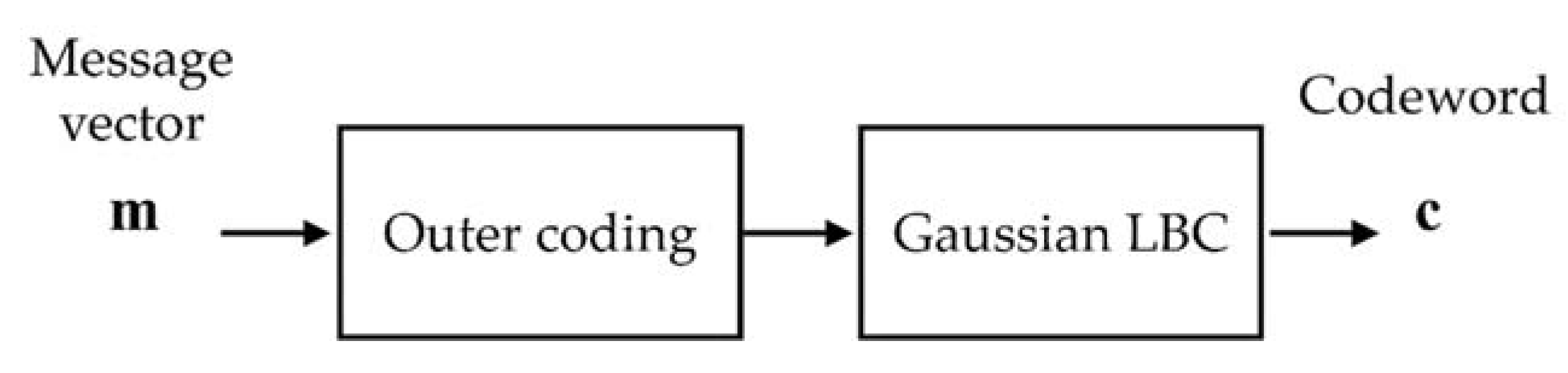
To provide an encoding method with coding gain, concatenation coding was considered. Namely, the encoding of a digital message
becomes a serial combination of two different coding methods, as depicted in
Figure 4. The message is encoded twice, first by an outer code
and then by an inner code
. We used a finite-field coding method, which yields a coding gain, as the outer code, and then used the Gaussian-LBC as the inner code so that the system could obtain the advantages of both the error-correcting coding and Gaussianity of the signal.
The decoding procedure is also two-fold. Given a jamming-mitigated codeword , the Gaussian-LBC codeword is decoded first by ; then, the outer codeword is decoded by . Here, we focus on the decoding of the Gaussian-LBC . Because the decoding of the Gaussian-LBC is equivalent to an overdetermined linear inverse problem (LIP), ML decoding can be performed using the least-squares method with computations, where is the length of the outer codeword. If the code rate of the outer code is fixed (i.e., ), the complexity is equivalent to . Based on the output of the Gaussian-LBC decoder , the original message is decoded using the outer code decoder , i.e., the recovered message vector .
2.2.2. Gaussian Codebook
The Gaussian codebook method is another coding method with coding gain. If the length of the binary message vector is , then codeword vectors of length are pregenerated. Then, the one-by-one mapping encoding function can be constructed between message vectors and codeword vectors. The codeword can be decoded using the ML method. computations are required to decode the original message from the proposed codeword generated by . Here, we construct a codebook with a Toeplitz matrix of which the columns are cyclic shifts of a Gaussian random vector , rather than generating every element of with an independent and identically distributed (i.i.d.) Gaussian. There are two benefits to constructing the codebook as a Toeplitz matrix. First, the Toeplitz structure accelerates the computation of the decoding method by using the fast Fourier transform (FFT). Second, such a codebook can be stored in a more memory-efficient manner than a random codebook because the Toeplitz codebook requires as much memory space as , whereas the i.i.d. codebook requires as much memory space as . If the computational costs of the FFT and inverse FFT (IFFT) are considered, the overall computational complexity becomes .
The concatenation method presented in
Section 2.2.1 is attractive in practice because well-studied finite-field coding methods can be directly exploited as the outer code. A proper outer code can be selected according to the purpose and requirements of the system. We used the codebook method in the following simulation section because the Toeplitz codebook method provides a good restricted isometric property (RIP) condition and is independent of the outer code design.
4. Undetectability Analysis
In this section, we present a comparison of the undetectability of the Gaussian-coded time-frequency modulation and binary modulation methods in terms of detection probability for Eve. To measure undetectability, a privacy rate was proposed in [
2]. The privacy rate is defined by the number of bits that can be transmitted covertly through the use of
channels. According to [
2], only
bits can be transmitted covertly; thus, the privacy rate cannot be a constant. However, [
3,
34] determined that a constant privacy rate is achievable if Eve is uncertain of the channel noise level. Conversely, detection probability is a simple and useful metric of undetectability. For example, the detection probability of chaotic-sequence DSSS signals was studied in [
13,
14]. The authors assumed that Eve knows most of the protocols used by target communication systems, such as carrier frequency, modulation, length of the spread sequence, and symbol duration, but not the exact spreading sequence. Then, she can attempt matched filtering with all possible spreading sequences for the received samples to determine if a signal exists. The studies determined the detection probability of chaotic DSSS signals for several types of chaotic sequences and compared the probability with that of conventional binary sequence DSSS signals.
To measure undetectability, we considered the detection probability as a metric. The eavesdropping problem was formulated as a hypothesis test. We explored the problem by dividing it into three cases according to uncertainty of noise for Eve. In the first case, Eve is assumed to have no information on the noise level. That is, Eve has an infinitely large uncertainty in terms of the noise level. In such extreme cases, the only option for Eve is to test whether the received samples are from a white Gaussian distribution or from other random distributions, i.e., Eve aims to determine the existence of a signal using a normality test. The second case is the other extreme scenario on the opposite side. In the second case, Eve has no uncertainty regarding the noise level. Thus, Eve knows the exact noise energy. In such a case, Eve can apply a hypothesis test based on a threshold of the symbol energy to distinguish whether the signal exists or not. However, the two extreme cases rarely occur in practice. Thus, in the third case, we define a parameter to quantify the amount of uncertainty Eve has on the noise level. In the following subsections, we measure and compare the undetectability of the proposed signal and conventional signals.
4.1. Undetectability under an Unknown Noise Level
In the first case, Eve is assumed to have no information on the noise level (Case 1). In the following section, we provide a simple analysis and example showing that Eve cannot distinguish the proposed signal, although she has a chance of detecting conventional signals. Let us recall the channel model depicted in
Figure 6 to determine the eavesdropping problem. Using the same vectorizing process as the legitimate channel model as presented in Equations (3) and (4), Eve obtains
where
is a combined wiretap channel matrix and
is a CSCG noise vector, which are derived using the same method as those of a legitimate channel, as discussed in
Section 3.2.
Consider that Eve monitors the communication channel and obtains a measurement vector assuming an exact carrier frequency, phase, and symbol duration. Moreover, consider a perfect channel state information and flat fading at Eve, which is a threat scenario for a WCS. Then, the receiving model is simplified to
where
is the channel coefficient satisfying
. In this scenario, Eve has to determine whether there is a signal using the hypothesis test:
where
is the real-valued codeword of which the entries are zero-mean Gaussian random variables with variance
,
is the AWGN whose entries are zero-mean Gaussian random variables with variance
, and
is the channel-compensated measurement vector.
In Case 1, Eve has to determine which hypothesis is true based on the PDF of . Let the variance of be . To test the two hypotheses, the only thing Eve can do is compare how close the sample distribution is to the distribution of Gaussian noise. This test is well known as the normality test. First, assume that Eve demonstrates perfection while calculating the sample distribution. Perfect here implies that Eve can collect an infinite number of samples each with infinite resolution; thus, the histogram distribution of the perfect Eve is identical to the distribution according to the true hypothesis.
Lemma 1. Assume that Eve is perfect while calculating the sample distribution. Let Eve not know the noise level. Then, she cannot detect the existence of the proposed signal, but she can detect finite-field modulated signals.
Proof of Lemma 1. Eve does not know the noise level. The addition of the Gaussian signal sample to the Gaussian noise sample produces a Gaussian sample. Thus, what Eve observes are Gaussian samples; Eve can only treat it as Gaussian noise. When Eve observes finite-level signal samples, a perfect Eve will notice that the observed signal deviates from the Gaussian samples. Thus, Eve can detect the presence of an ongoing communication signal. □
It is worth noting that Lemma 1 is satisfied in the ideal case. Namely, it holds when the degree of freedom of the codebook is infinite and Eve can correct an infinite number of samples. However, both conditions cannot be perfect in practice. The degree of freedom of a fixed codebook is limited by the size of the codebook. It causes a distortion between the distributions of the actual symbol and desired Gaussian symbols. In addition, Eve must perform the normality test with a finite number of samples and a finite level of precision. This means that the error probability of the normality test is not zero even for the Gaussian signal. However, the distortion of the distribution can be compensated for by the limited resolvability [
35] of the channel between the transmitter and Eve. Since the channel is noisy, small distortions of the input distribution cannot affect the test output of Eve. Moreover, despite all these limitations, it is obvious that the probability of being detected for the proposed signal is far lower than the probability of any conventional non-Gaussian signal.
4.2. Undetectability under an Exact Noise Level
Now, let us focus on Case 2. In this case, Eve is assumed to have perfect information on the noise level. The simplest solution for this testing strategy is to use an energy detector of which the goal is to determine whether the signal is present by comparing the energy of the received symbol.
In the energy detection, the test statistic of Equation (26) becomes the squared sum of symbols. As we assumed, Eve does not know the exact time-frequency band of the target signals. Then, Eve has two strategies for testing. The first is obtaining a single test statistic by integrating the whole energy over a suspected time-frequency band. It is obvious that the test statistic depends on both the SNR and the suspected region, regardless of the coding and modulation method of the target signal. Then the test result depends only on how accurate the suspected region is. Rather than this trivial case, we focus on the other strategy: dividing the suspected region with as fine a grid as Eve can produce, and applying per-symbol energy detection to determine the signal existence according to each time-frequency slot. By this strategy, Eve can evaluate the slot-by-slot possibility of signal presence. Based on this possibility, Eve can jointly estimate the suspected region and probability of signal presence. The performance of this joint detection of possibility and region depends on the per-symbol test. From this aspect, we derive the true positive of the per-symbol hypothesis test (i.e., probability of detection). We compare the probability for the proposed method and that for the conventional binary method, which follows Lemma 2.
Lemma 2. Let Eve, using an energy-detecting strategy, know the exact noise level. If Eve has a false alarm probability, then the per-symbol detection probabilities of the proposed signaland BPSK-modulated signal PD,Binary arewhere,, andthe-function is defined by Proof of Lemma 2. In Case 2, Eve has information about the wiretap channel noise level. Without the loss of generality, the hypothesis test in Equation (26) is simplified into a per-symbol hypothesis test, as shown below:
where
,
, and
are the corresponding single samples of
,
, and
. We determine a threshold
and use the following likelihood ratio test to determine which hypothesis is true:
The threshold
is selected according to the desired false alarm probability
. Because the noise is Gaussian,
can be calculated using the
-function:
We can now compare the probability of detection for the traditional binary modulation and proposed modulation methods. The probability of detection can be calculated as the
-tail probability of the distribution of
given that
is true, through a process similar to that used in [
13,
14]. For a binary modulation scheme of which the constellation is distributed uniformly at the points
, the distribution of
when
is true becomes
The probability of detection for a uniformly distributed binary signal is
In contrast, consider the proposed signal of which the sample value obeys a Gaussian random distribution with zero mean and variance
. Then, the PDF of
is also a Gaussian PDF with zero mean and
variance. The
-tail probability is calculated directly as
Letting , the two probabilities obtained using Equations (33) and (34) are equivalent to Equation (27). □
Lemma 2 shows that if the normalized SNR of Eve is , the two probabilities are nearly identical. In contrast, if , the detection probability of a Gaussian signal is lower than that of a binary signal. Thus, if the SNR of the channel between Alice and Eve is higher, a Gaussian signal is superior to a binary signal in terms of undetectability.
At a moderate SNR, the false alarm probability of Eve (parameter ) determines the detection probability. As the false alarm probability increases (i.e., Eve is more sensitive), a Gaussian symbol becomes more undetectable than a binary symbol.
4.3. Undetectability under an Uncertain Noise Level
In practice, Eve must estimate the noise level, , to determine the proper threshold, . The estimation error affects the tradeoff between the detection probability and the false alarm probability. Let the estimated noise variance be using an uncertainty parameter, . Under this definition, the uncertainty increases when the interval grows. In contrast, the uncertainty becomes smaller when the interval becomes narrower, and finally becomes zero when . In this scenario, Eve sets the parameter by using instead of to set the decision threshold, . Then, the detection and false alarm probabilities in Lemma 2 change according to , as shown below.
Lemma 3. Let Eve, using an energy-detecting strategy, estimate the noise level to bewith the uncertainty parameter. Then, for the target false alarm probability of Eve,, the per-symbol detection probabilities of the proposed signaland BPSK-modulated signal PD,Binary areand the actual false alarm probability becomes.
One can easily prove Lemma 3 by calculating the
-tail probability using the same procedure as used in Equations (32)–(34). Lemma 3 shows that the uncertainty of the noise level of Eve only causes a shift in the tradeoff between the detection probability and the false alarm probability. This implies that
increases and
decreases if Eve underestimates (
) the noise level; in contrast,
decreases and
increases if Eve overestimates (
) the noise level. The results for different
are illustrated in
Figure 7.
In conclusion, Lemma 1 shows that the proposed method is more undetectable than the finite-field modulation method, regardless of the eavesdropping scenario. Lemmas 2 and 3 show that the proposed method is more undetectable than the traditional binary modulation method, especially when the eavesdropping scenario is more threatening.
6. Results
In this section, we present numerical results to demonstrate the anti-jamming performance of the proposed system. First, we compare the SJE qualities of the two algorithms, GSJE and BSJE, in terms of the mean squared error (MSE). Second, we demonstrate the BER at the receiver under a jamming attack using several channels (AWGN and frequency-selective fading), coding methods (linear Gaussian and codebook), and jamming estimation algorithms (GSJE and BSJE).
6.1. Sparse Jamming Estimation Error
We evaluated the SJE performance of the GSJE and BSJE algorithms for the proposed system. In general, the BSJE algorithm shows better SJE performance than the GSJE. However, as the two algorithms have advantages and disadvantages, we must select an algorithm for practical applications.
In practical implementations, the appropriate maximum number of iterations should be chosen to ensure the completeness of the iterative algorithm. As the maximum number of iterations for BSJE is empirically selected, the output of the algorithm may not sufficiently converge to the solution. In contrast, GSJE has a fixed maximum number of iterations, which is in the worst case. Owing to the aforementioned implementation limitations of BSJE, there are several regions in which the BSJE algorithm performs equivalently to, and sometimes worse than, GSJE.
The BSJE algorithm calculates several matrix products and matrix inversions in a single iteration, whereas the GSJE algorithm requires only a single matrix product and the inversion of a smaller submatrix. In general, GSJE is significantly faster than BSJE, especially when the size of the system becomes larger.
The above two problems discourage the use of the BSJE algorithm. However, the GSJE algorithm requires prior knowledge about the signal to define its termination conditions, and this assumption about prior knowledge might be unrealistic. For example, if the maximum cardinality of the support set is given as the termination condition, a receiver executing the GSJE algorithm must know the support set of the jammer. This assumption that the receiver will know the information a priori is impractical. If this prior information is unknown, the optimum
K is the maximum possible number of jamming coefficients for GSJE. Unfortunately, this value depends on the RIP of the annihilating matrix
. Since
is constructed from the random matrix
, the
K must be calculated every time the codebook changes. However, evaluating the RIP takes considerable time. The overhead further increases since the codebook must vary over time to guarantee security. Thus calculating the optimum
K for each codebook change is not practicable. Instead, we heuristically evaluated the average RIP for multiple realizations of
, and roughly set
by applying Wakin’s bound [
51].
Accordingly, we performed a numerical simulation to compare the GSJE and BSJE algorithms. The two algorithms were compared in terms of jamming estimation performance (as measured by MSE) and time complexity (as measured by running time) at various JNRs and levels of prior knowledge for the GSJE algorithm. We set the level of prior knowledge as how much Bob precisely knows about the cardinality of jamming (e.g., sparsity,
K). The measure of prior knowledge is classified into two levels as a function of the true value of
K, as listed in
Table 2.
Using the above values, we compared the normalized MSE of the jamming estimation and the corresponding running time. The block length of the complex-valued codeword was set to 1024, and the number of possible message vectors was eight. Thus, the code rate was 8/2048 = 1/256. Among the 1024 complex samples, 128 samples were contaminated by jamming; thus, the jamming rate was 128/1024 = 1/8. We compared the results according to three different JNRs: 10, 5, and 0 dB. The results are listed in
Table 3.
The results reveal the jamming estimation performance of the GSJE and BSJE algorithms. The MSE of the GSJE algorithm increases as the uncertainty of prior knowledge increases. For example, the MSE of the GSJE with perfect knowledge is 0.0446 at a JNR of 10 dB, which is higher than that of BSJE; however, the MSE decreases to 0.0880 under the same conditions, except for the condition in which prior knowledge is unknown. Its MSE value with unknown prior knowledge is lower than that of BSJE.
The performance of both algorithms degrades as the JNR decreases. However, the degree of performance degradation is greater for the GSJE algorithm. For example, the MSEs of the GSJE with perfect knowledge are 0.193 at a JNR of 5 dB and 0.754 at a JNR of 0 dB, which are lower than those of BSJE. It can be recalled that the MSE of GSJE is higher than that of BSJE at a JNR of 10 dB. Thus, BSJE is more suitable for environments with large JNR ranges than the GSJE. This agrees with the theoretical expectation that the output noise model of GSJE becomes more distinguishable with the true signal model as JNR decreases from 10 dB to 0 dB.
The results indicate that the BSJE algorithm is far slower than the GSJE algorithm. However, the running time of GSJE increases when it suffers from a lack of prior knowledge. For example, GSJE is more than ten times faster when it has perfect knowledge and approximately four times faster when it does not have any prior knowledge. In contrast, the running time of BSJE is almost constant regardless of the prior knowledge since BSJE does not explicitly exploit the information.
6.2. Bit Error Rate under Jamming
We evaluated the BER at the receiver under jamming attacks in multiple scenarios. The results presented in
Figure 7 and
Figure 8 illustrate the BER performance of the proposed system in the AWGN channel under a jamming attack with a JNR of 0 dB. The block length of the complex-valued codeword was set to 512 and the number of possible message vectors was four. Thus, the code rate was 4/1024 = 1/256. At the same time, we evaluated the BER of an uncoded DSSS that had same rate in order to use this as a baseline. Among the 512 complex-valued samples, 64 samples were contaminated by jamming; thus, the jamming rate was 64/512 = 1/8. We evaluated the BER under jamming over the
region from 0 dB to 16 dB, corresponding to SNRs from −24 dB to −8 dB, as SNR is calculated by
. Note that the SNR is far below the noise floor. As illustrated in
Figure 8, the BER of the proposed method using the BSJE and GSJE algorithms with perfect prior knowledge approaches the BER of jamming-free QPSK as
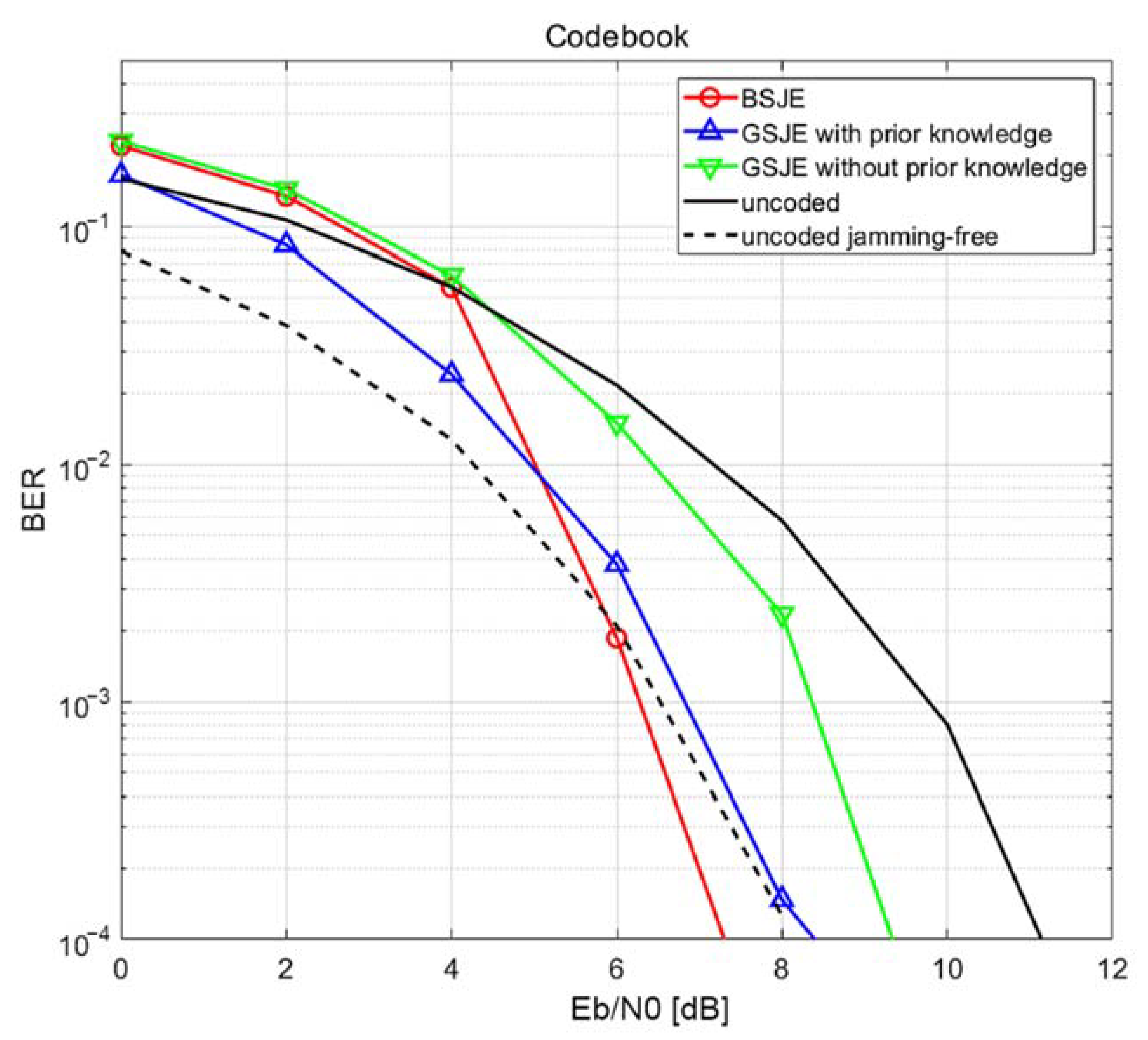
grows. In contrast, the BER of the GSJE without any prior knowledge cannot achieve anti-jamming performance. Furthermore, if the proposed codeword is drawn using the codebook method, the BER of the proposed method with the BSJE algorithm outperforms that of the jamming-free QPSK, as illustrated in
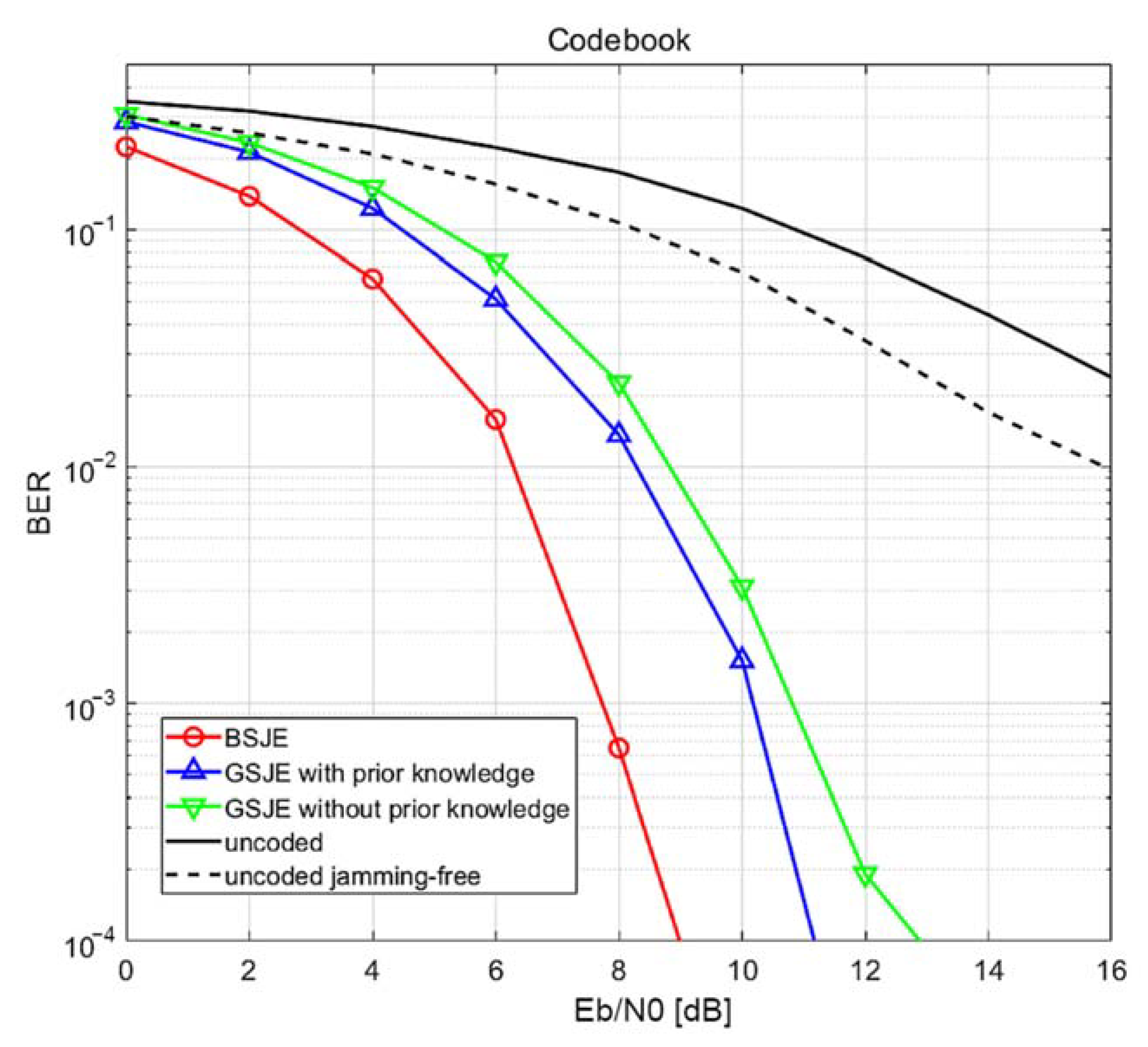
Figure 9. Thus, the proposed method achieves a coding gain while simultaneously having an anti-jamming property.
Figure 9 and
Figure 10 illustrate the BER performance of the proposed system over a frequency-selective fading channel. The simulation was performed over a frequency-selective fading channel with frequency-domain channel coefficients following an i.i.d. CSCG random distribution
, with the other parameters being identical to those in the AWGN channel simulation. Because several subbands have significantly low gain, the BER of the uncoded QPSK signal is significantly more degraded than that in the AWGN channel simulation. In contrast, the BER degradation of the proposed method is tolerable when compared to that of the uncoded QPSK. The method using BSJE demonstrates the highest performance, and the method using GSJE shows the lowest performance among the proposed methods. Consistent with the AWGN channel simulation, the performance of the codebook method illustrated in
Figure 11 is superior to that of the linear Gaussian method illustrated in
Figure 10.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}