
Design of External Rotor Ferrite-Assisted Synchronous Reluctance Motor for High Power Density


Abstract
1. Introduction
2. Challenges and Design Considerations for High Power Density External Rotor Fe-PMaSyn RM
2.1. Concerns with Reluctance Torque Portion in High Power Density External Rotor PMaSynRM
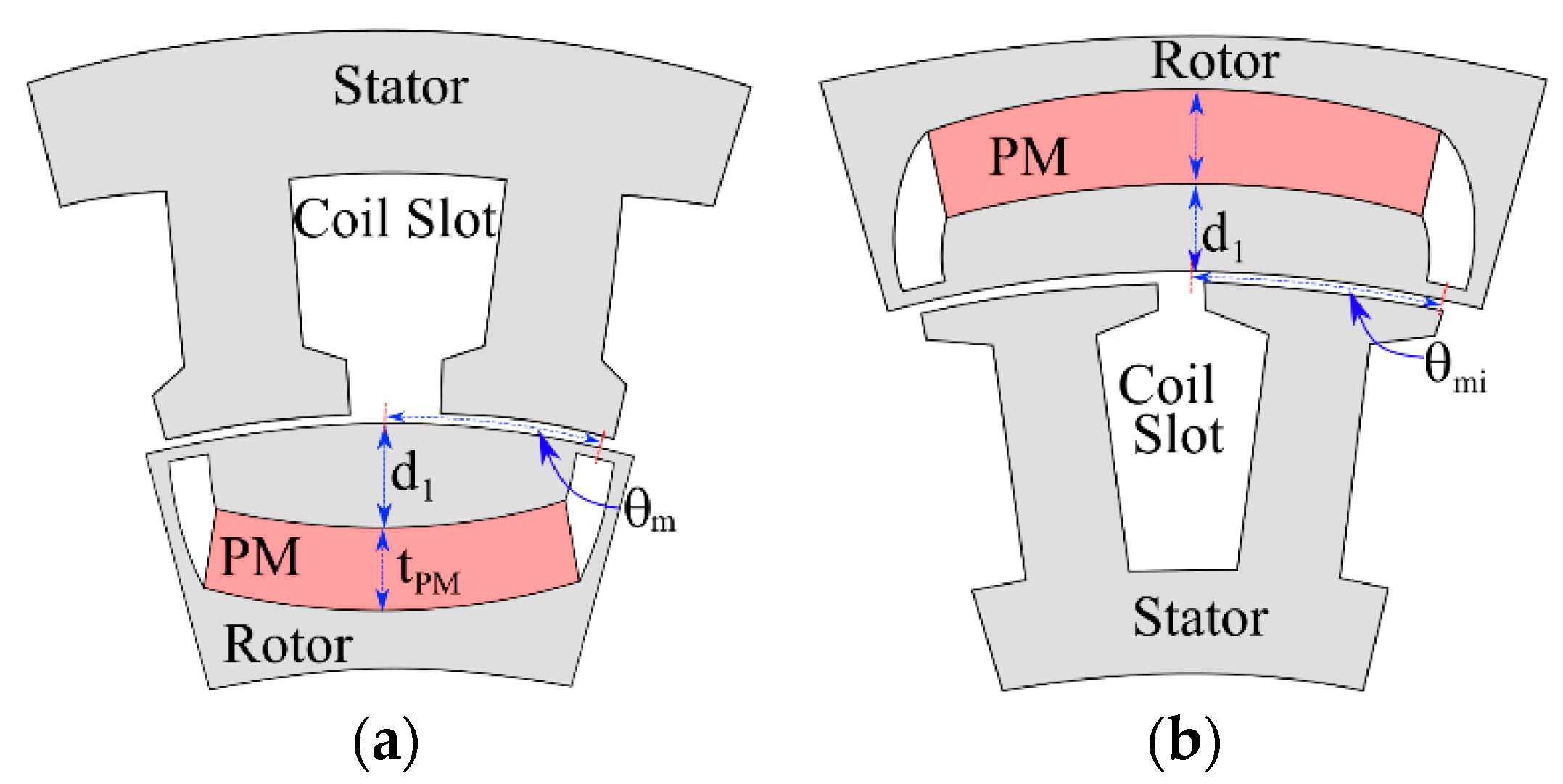
2.2. Demagnetization Concerns with External Rotor Structure
3. Design of Fe-PMaSynRM for High Power Density
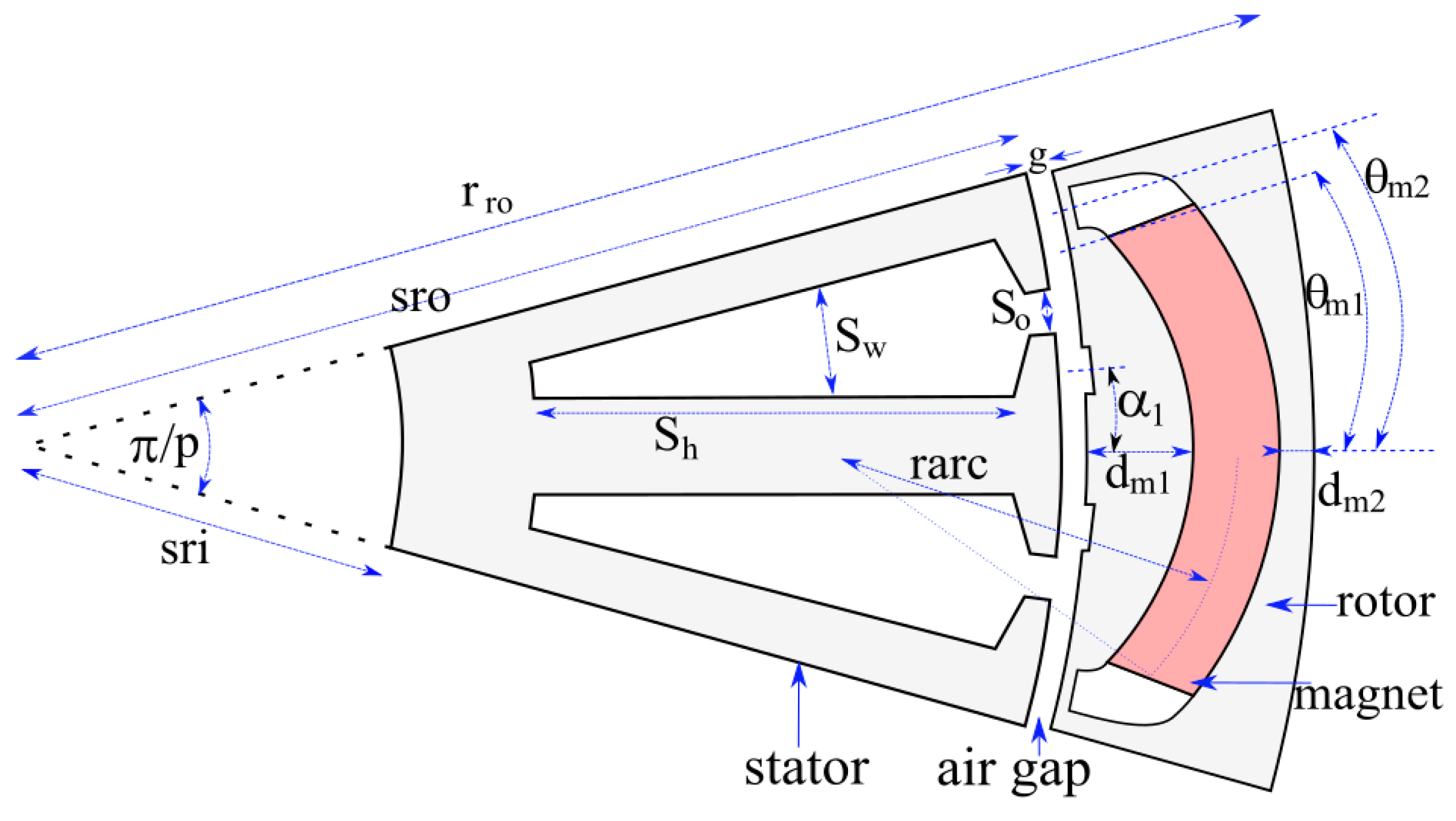
3.1. The Designs of Flux Barrier
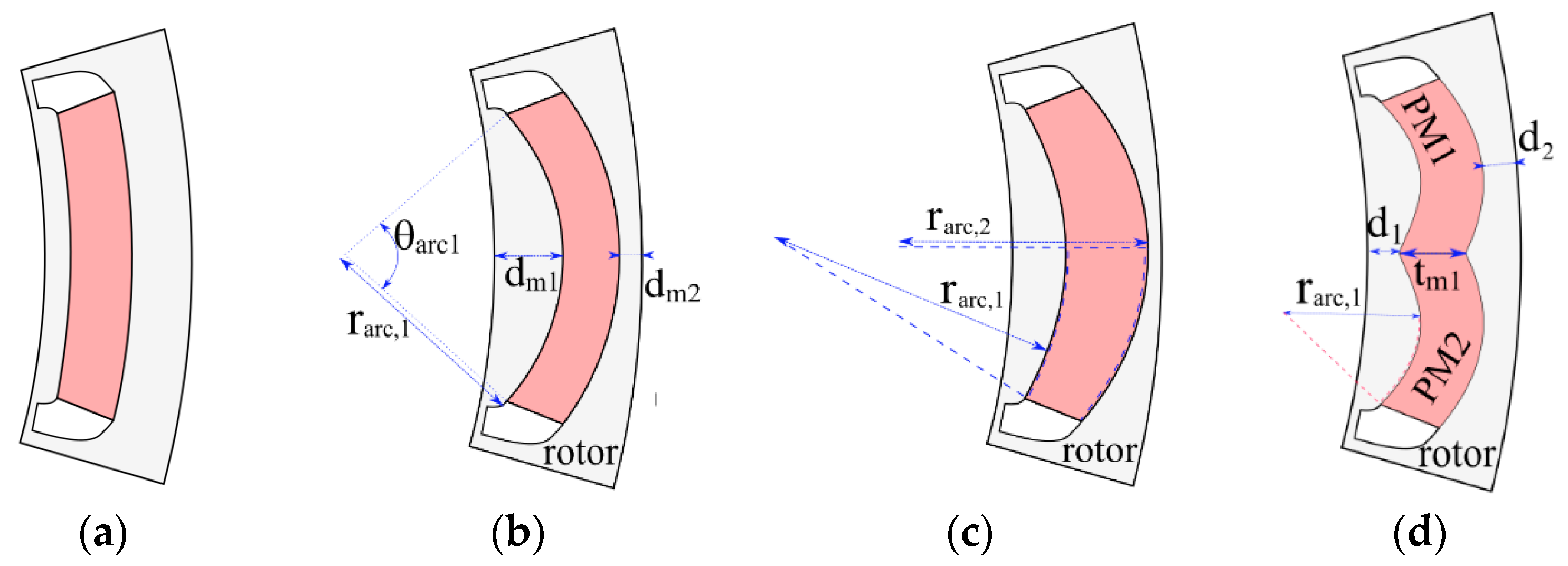
3.1.1. Varying Degree of Curvature Arc-shaped PM
3.1.2. Variation Developed Torque and Anti-Demagnetization Ability with PM-Shape
3.2. Magnetic Equivalent Circuit-Based Analytical Model
3.3. Optimization Algorithm
- (1)
- maximum torque > 18 Nm
- (2)
- minimum torque ripple < 5%
- (3)
- input current < 15 A rms
- (4)
- Eloss < 5% of input power
- (5)
- rotor outer diameter = 190 mm
- (6)
- rotor speed = 1800 rpm
- (7)
- ratio of maximum reluctance torque to total torque > 0.3
3.4. Optimal Design Variables
3.5. Multi-Physics Analysis
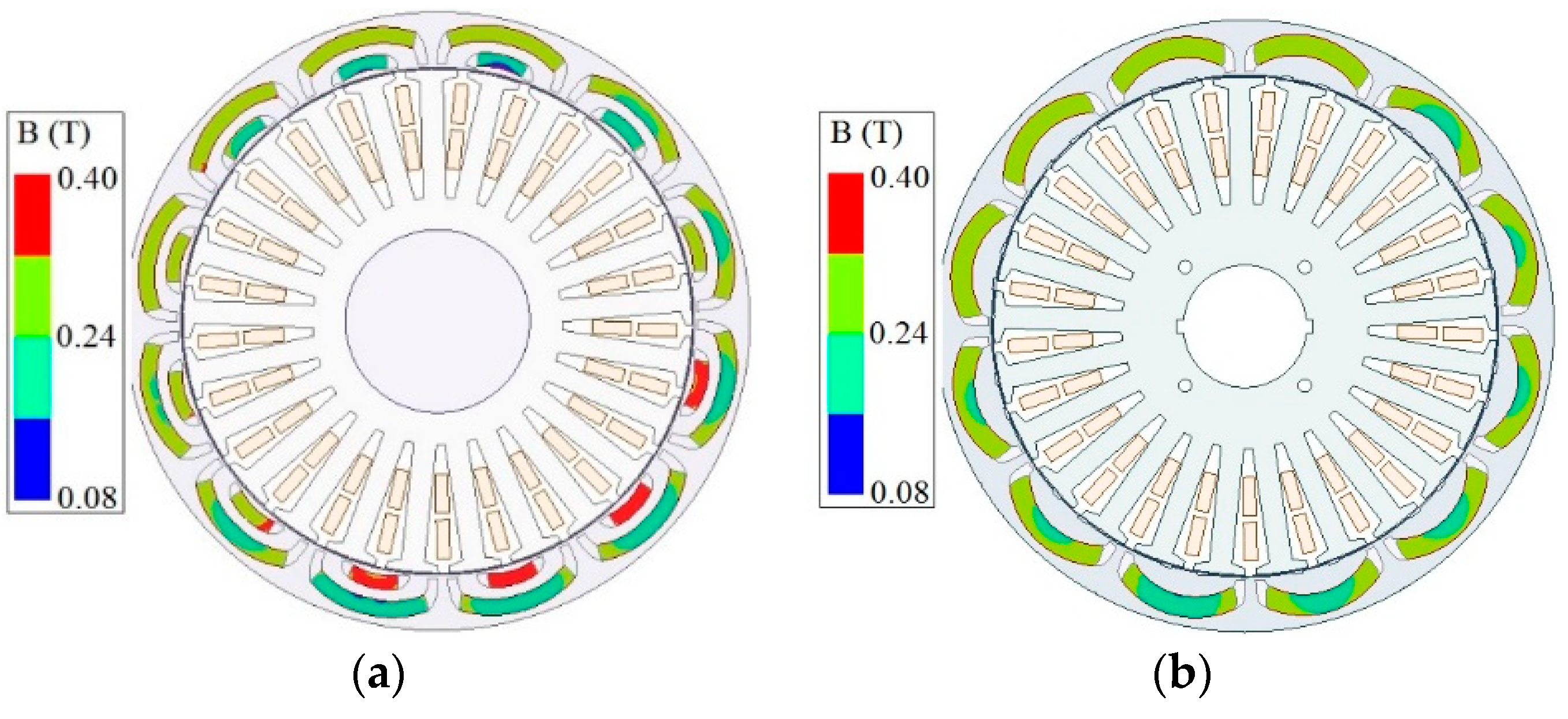
3.5.1. Flux Density under No-Load and Rated Load
3.5.2. Flux Density under Demagnetizing Field
3.5.3. The Decision on Rotor Configuration Based on Electromagnetic Analysis
4. Finite Element Simulations
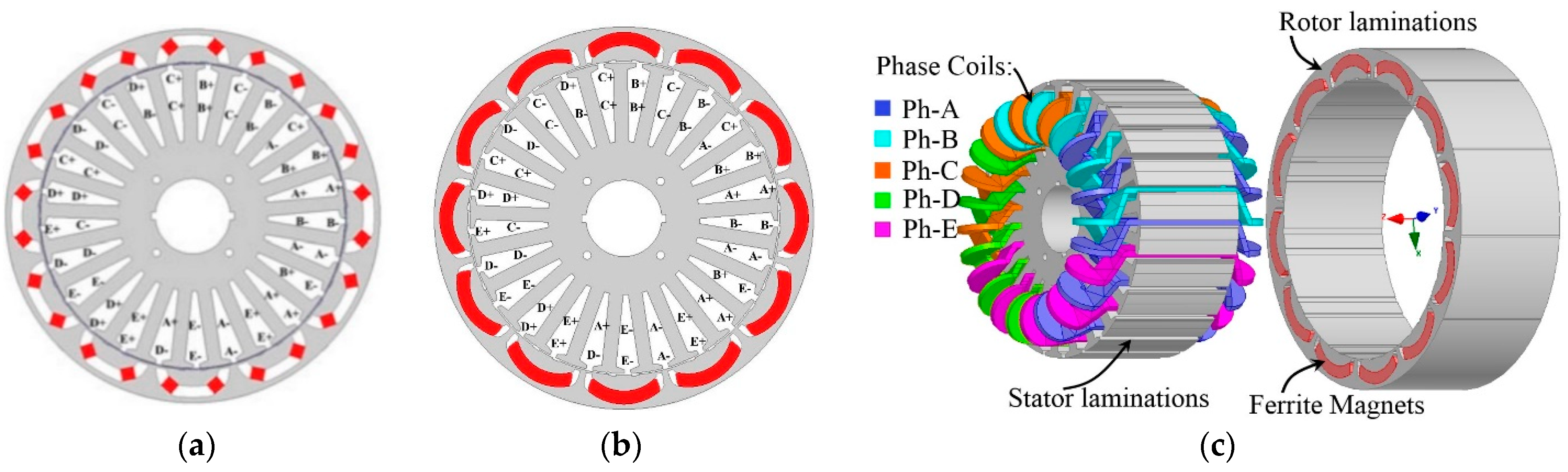
4.1. FEA Models of the Optimal Designs
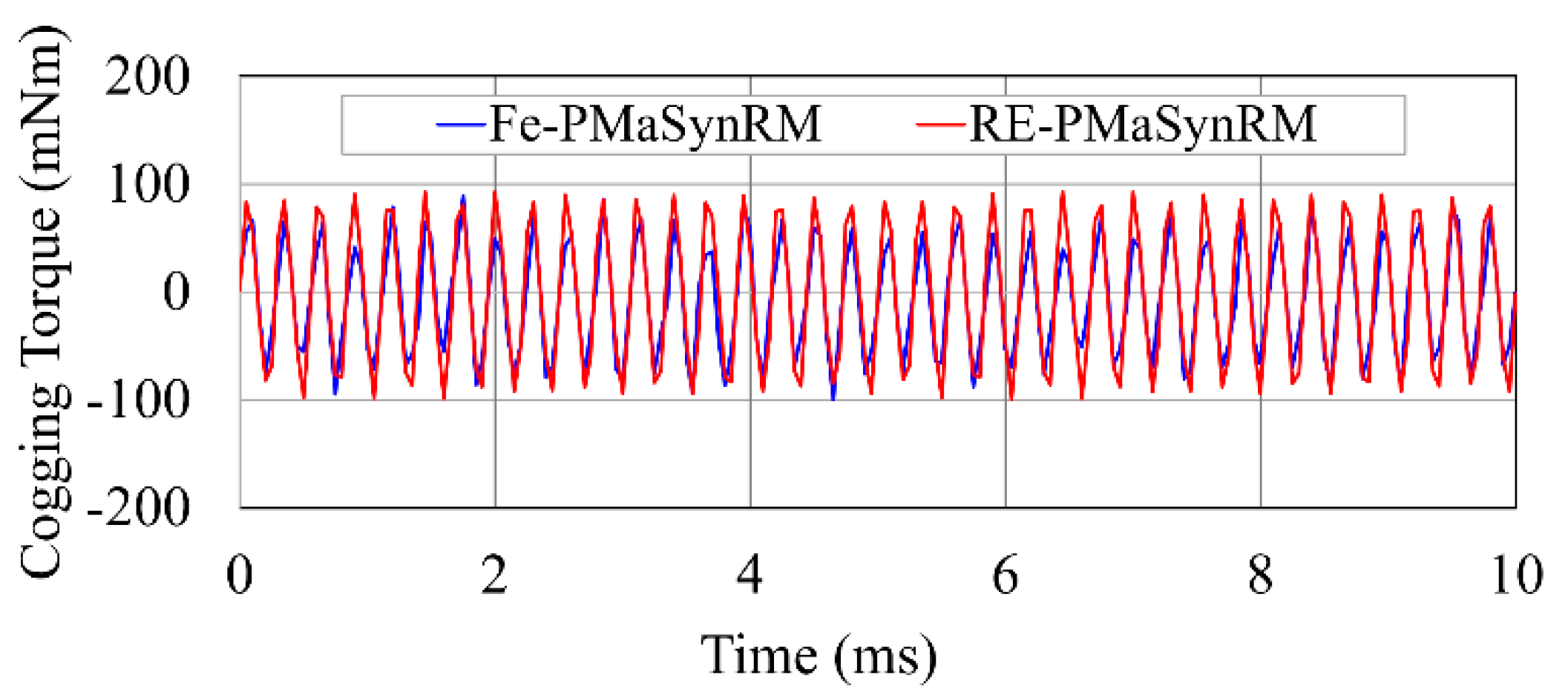
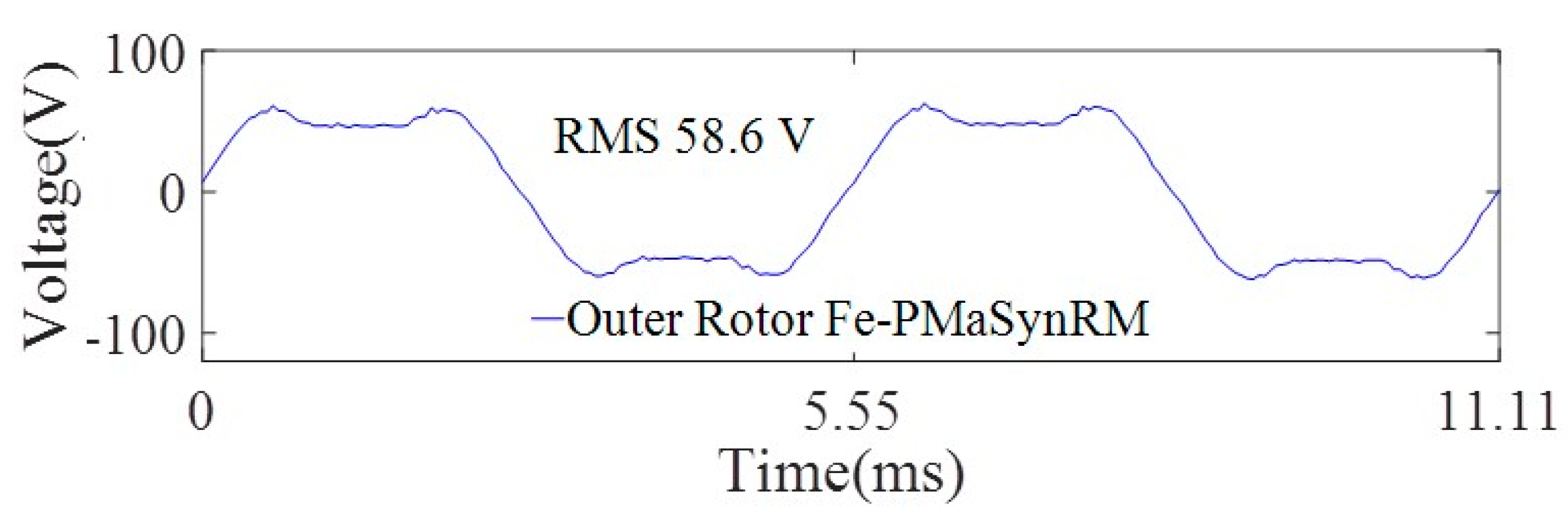
4.2. Cogging Torque and Back-EMF under No-Load
4.3. Developed Torque under Rated-Load
4.4. Anti-Demagnetization Ability Observation
4.5. Summary of Design Comparisons
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, D.-K.; Ro, J.-S. Analysis and Design of a High-Performance Traction Motor for Heavy-Duty Vehicles. Energies 2020, 13, 3150. [Google Scholar] [CrossRef]
- Reddy, P.B.; El-Refaie, A.M.; Huh, K.K.; Tangudu, J.K.; Jahns, T.M. Comparison of interior and surface pm machines equipped with fractional-slot concentrated windings for hybrid traction applications. IEEE Trans. Ind. Electron. 2012, 27, 593–602. [Google Scholar] [CrossRef]
- Sarlioglu, B.; Morris, C.T.; Han, D.; Li, S. Driving Toward Accessibility: A Review of Technological Improvements for Electric Machines, Power Electronics, and Batteries for Electric and Hybrid Vehicles. IEEE Ind. Appl. Mag. 2017, 23, 14–25. [Google Scholar] [CrossRef]
- Jahns, T. Getting Rare-Earth Magnets Out of EV Traction Machines: A review of the many approaches being pursued to minimize or eliminate rare-earth magnets from future EV drivetrains. IEEE Electrif. Mag. 2017, 5, 6–18. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L.N.; Parsa, L.; Dorrell, D. Automotive Electric Propulsion Systems with Reduced or No Permanent Magnets: An Overview. IEEE Trans. Ind. Electron. 2014, 61, 5696–5711. [Google Scholar] [CrossRef]
- Yoon, K.-Y.; Baek, S.-W. Performance Improvement of Concentrated-Flux Type IPM PMSM Motor with Flared-Shape Magnet Arrangement. Appl. Sci. 2020, 10, 6061. [Google Scholar] [CrossRef]
- Chan, C.C.; Jiang, J.Z.; Chen, G.H.; Wang, X.Y.; Chau, K.T. A novel polyphase multipole square-wave permanent magnet motor drive for electric vehicles. IEEE Trans. Ind. Appl. 1994, 30, 1258–1266. [Google Scholar] [CrossRef]
- Boazzo, B.; Vagati, A.; Pellegrino, G.; Armando, E.; Guglielmi, P. Multipolar Ferrite-Assisted Synchronous Reluctance Machines: A General Design Approach. IEEE Trans. Ind. Electron. 2014, 62, 832–845. [Google Scholar] [CrossRef]
- Bostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and Challenges of Switched Reluctance Motor Drives for Electric Propulsion: A Comparative Study. IEEE Trans. Transp. Electrif. 2017, 3, 58–75. [Google Scholar] [CrossRef]
- Lee, C.H.T.; Chau, K.T.; Liu, C.; Wu, D.; Gao, S. Quantitative Comparison and Analysis of Magnetless Machines With Reluctance Topologies. IEEE Trans. Magn. 2013, 49, 3969–3972. [Google Scholar] [CrossRef]
- Yang, Y.; Castano, S.M.; Yang, R.; Kasprzak, M.; Bilgin, B.; Sathyan, A.; Dadkhah, H.; Emadi, A. Design and Comparison of Interior Permanent Magnet Motor Topologies for Traction Applications. IEEE Trans. Transp. Electrif. 2016, 3, 86–97. [Google Scholar] [CrossRef]
- Tessarolo, A.; Mezzarobba, M.; Menis, R. Modeling, Analysis, and Testing of a Novel Spoke-Type Interior Permanent Magnet Motor With Improved Flux Weakening Capability. IEEE Trans. Magn. 2015, 51, 1–10. [Google Scholar] [CrossRef]
- Cai, H.; Guan, B.; Xu, L. Low-Cost Ferrite PM-Assisted Synchronous Reluctance Machine for Electric Vehicles. IEEE Trans. Ind. Electron. 2014, 61, 5741–5748. [Google Scholar] [CrossRef]
- Ooi, S.; Morimoto, S.; Sanada, M.; Inoue, Y. Performance evaluation of a high-power-density pmasynrm with ferrite magnets. IEEE Trans. Ind. Appl. 2013, 49, 1308–1315. [Google Scholar] [CrossRef]
- Morimoto, S.; Sanada, M.; Takeda, Y. Performance of PM-assisted synchronous reluctance motor for high-efficiency and wide constant-power operation. IEEE Trans. Ind. Appl. 2001, 37, 1234–1240. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, D.; Lipo, T.A.; Kwon, B.I. Performance improvement of ferrite-assisted synchronous reluctance machines using asymmetrical rotor configurations. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar]
- Wang, Y.; Bacco, G.; Bianchi, N. Geometry analysis and optimization of pm-assisted reluctance motors. IEEE Trans. Ind. Appl. 2017, 53, 4338–4347. [Google Scholar] [CrossRef]
- Vagati, A.; Boazzo, B.; Guglielmi, P.; Pellegrino, G.-M.L. Design of Ferrite-Assisted Synchronous Reluctance Machines Robust Toward Demagnetization. IEEE Trans. Ind. Appl. 2014, 50, 1768–1779. [Google Scholar] [CrossRef]
- Tovar-Barranco, A.; Briz, F.; Lopez-De-Heredia, A.; Villar, I. Comparison of permanent magnet synchronous machines with concentrated windings and different rotor configurations. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe) IEEE, Warsaw, Poland, 11–14 September 2017; pp. 1–8. [Google Scholar]
- Shen, Y.; Zhu, Z.Q. Analytical Prediction of Optimal Split Ratio for Fractional-Slot External Rotor PM Brushless Machines. IEEE Trans. Magn. 2011, 47, 4187–4190. [Google Scholar] [CrossRef]
- Xue, X.D.; Cheng, K.W.E.; Ng, T.W.; Cheung, N.C. Multi-Objective Optimization Design of In-Wheel Switched Reluctance Motors in Electric Vehicles. IEEE Trans. Ind. Electron. 2010, 57, 2980–2987. [Google Scholar] [CrossRef]
- Yu, D.; Huang, X.; Zhang, X.; Zhang, J.; Lu, Q.; Fang, Y. Optimal Design of Outer Rotor Interior Permanent Magnet Synchronous Machine With Hybrid Permanent Magnet. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Yang, Y.; Rahman, M.M.; Lambert, T.; Bilgin, B.; Emadi, A. Development of an External Rotor V-Shape Permanent Magnet Machine for E-Bike Application. IEEE Trans. Energy Convers. 2018, 33, 1650–1658. [Google Scholar] [CrossRef]
- Dhawan, R.K. Multi-phase multi-pole electric machine. U.S. Patent 9774290 B2, September 2017. [Google Scholar]
- Watts, A.; Vallance, A.; Fraser, A.; Whitehead, A.; Hilton, C.; Monkhouse, H.; Barrie-Smith, J.; George, S.; Ellims, M. Integrating In-Wheel Motors into Vehicles - Real-World Experiences. SAE Int. J. Altern. Powertrains 2012, 1, 289–307. [Google Scholar] [CrossRef]
- Deshpande, Y.; Toliyat, H.A. Design of an outer rotor ferrite assisted synchronous reluctance machine (fa-synrm) for electric two wheeler application. IEEE Energy Convers. Congr. Expo. 2014, 3147–3154. [Google Scholar] [CrossRef]
- Islam, M.Z.; Choi, S. Design of rare-earth free five-phase outer-rotor ipm motor drive for electric bicycle. IEEE Applied Power Electron. Conf. Expo. 2016, 631–637. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Choi, S.; Baek, J. Design optimization with multi-physics analysis on external rotor permanent magnet assisted synchronous reluctance motors. IEEE Trans. Energy Convers. 2017, 33, 290–298. [Google Scholar]
- Bonthu, S.S.R.; Arafat, A.; Choi, S. Comparisons of Rare-Earth and Rare-Earth-Free External Rotor Permanent Magnet Assisted Synchronous Reluctance Motors. IEEE Trans. Ind. Electron. 2017, 64, 9729–9738. [Google Scholar] [CrossRef]
- Baek, J.; Bonthu, S.S.R.; Choi, S. Design of five-phase permanent magnet assisted synchronous reluctance moto for low output torque ripple applications. IET Electric Power Appl. 2016, 10, 339–346. [Google Scholar] [CrossRef]
- Raj, M.A.; Kavitha, A. Effect of Rotor Geometry on Peak and Average Torque of External-Rotor Synchronous Reluctance Motor in Comparison With Switched Reluctance Motor for Low-Speed Direct-Drive Domestic Application. IEEE Trans. Magn. 2017, 53, 1–8. [Google Scholar] [CrossRef]
- Bianchi, N.; Jahns, T. Design, analysis and control of interior pm synchronous machines. Tutor. IEEE Course Note 2004, 4, 10.1–10.20. [Google Scholar]
- Lovelace, E.; Jahns, T.; Lang, J. A saturating lumped parameter model for an interior PM synchronous machine. IEEE Int. Electric Mach. Drives Conf. 2003, 38, 645–650. [Google Scholar] [CrossRef]
- Momen, F.; Rahman, K.; Son, Y. Electrical Propulsion System Design of Chevrolet Bolt Battery Electric Vehicle. IEEE Trans. Ind. Appl. 2019, 55, 376–384. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Explanation |
|---|---|
| Rgi | Air gap reluctance corresponding to the i-th iron segment |
| Rsti | Stator tooth reluctance corresponding to the i-th iron segment |
| Rryi | Rotor yoke reluctance corresponding the i-th iron segment |
| Rbi | The reluctance of the i-th flux barrier |
| Φgi | Air gap flux flowing from rotor to stator through Rgi |
| Φmi | Flux through magnet in the i-th flux barrier |
| Φbi | Flux through the flux barrier in the i-th flux barrier |
| fdsi | Stator magnetic potentials corresponding the i-th iron-segment in d-axis MEC |
| fqsi | Stator magnetic potentials difference across to the i-th flux barrier in q-axis EMC |
| fri | Rotor magnetic potentials on the i-th flux barrier in q-axis EMC |
| Δfr,i | fri - fr(i+1) |
| Design Parameter | Min | Max | Converged |
|---|---|---|---|
| Back iron depth of stator (mm) | 5 | 25 | 19.42 |
| No. of poles | 4 | 30 | 12 |
| No. of slots | 10 | 60 | 25 |
| rri/rro | 0.5 | 0.9 | 0.82 |
| (dm1 + dm2)/(rri − rro) | 0.3 | 0.9 | 0.62 |
| dm1/(dm1 + dm2) | 0.3 | 0.9 | 0.76 |
| Sh/Sw | 0.5 | 3.5 | 3.11 |
| θm1 (electrical degree) | 60 | 85 | 72 |
| θm2 (electrical degree) | 60 | 90 | 77 |
| Name | Benchmark RE-PMaSynRM | Proposed Fe-PMaSynRM |
|---|---|---|
| Rated power (kW) | 3.8 | 3.7 |
| Rated speed (rpm) | 1800 | 1800 |
| Slot/Pole | 25/12 | 25/12 |
| Rated Current (A) | 9 | 10.5 |
| Stator outer diameter (mm) | 190 | 190 |
| Magnet Material | NdFeB, Nd35 | Ferrite, Y30H-2 |
| Total Volume of Magnet (L) | 0.065 | 0.19 |
| Stack length (mm) | 65 | 65 |
| Air-gap length (mm) | 0.7 | 0.7 |
| Parameter | Proposed Fe-PMaSynRM | Benchmark RE-PMaSynRM |
|---|---|---|
| Avg. Torque (Nm) | 19.2 | 19.7 |
| Torque ripple (%) | 4.8 | 4.9 |
| Cogging Torque (pk-to-pk) (Nm) | 0.2 | 0.2 |
| Back-EMF (per phase rms) (V) | 47 | 63.7 |
| Rated rms current (A) | 10.5 | 9 |
| Speed | Torque | Core Loss [W] | Copper Loss [W] | Efficiency [%] |
|---|---|---|---|---|
| 1800 | 19.2 | 97.9 | 154.63 | 94.64 |
| 1800 | 6 | 42.3 | 20.23 | 95.26 |
| 1800 | −6 | 44 | 20.23 | 94.85 |
| 1800 | −19.2 | 109.8 | 157.93 | 93.85 |
| 2500 | 1.5 | 54.4 | 1.42 | 89.9 |
| 4500 | 1.5 | 123.5 | 23.96 | 83.7 |
| 5500 | 3 | 365 | 157.94 | 79.5 |
| Item | Initial Model | Optimal Model |
|---|---|---|
| Stator steel mass [kg] | 5.46 | 5.37 |
| Rotor steel mass [kg] | 2.78 | 2.85 |
| Winding copper mass [kg] | 3.32 | 3.20 |
| Ferrite PM [kg] | 1.03 | 0.93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, M.Z.; Choi, S.; Elbuluk, M.E.; Bonthu, S.S.R.; Arafat, A.; Baek, J. Design of External Rotor Ferrite-Assisted Synchronous Reluctance Motor for High Power Density. Appl. Sci. 2021, 11, 3102. https://doi.org/10.3390/app11073102
Islam MZ, Choi S, Elbuluk ME, Bonthu SSR, Arafat A, Baek J. Design of External Rotor Ferrite-Assisted Synchronous Reluctance Motor for High Power Density. Applied Sciences. 2021; 11(7):3102. https://doi.org/10.3390/app11073102
Chicago/Turabian StyleIslam, Md. Zakirul, Seungdeog Choi, Malik E. Elbuluk, Sai Sudheer Reddy Bonthu, Akm Arafat, and Jeihoon Baek. 2021. "Design of External Rotor Ferrite-Assisted Synchronous Reluctance Motor for High Power Density" Applied Sciences 11, no. 7: 3102. https://doi.org/10.3390/app11073102
APA StyleIslam, M. Z., Choi, S., Elbuluk, M. E., Bonthu, S. S. R., Arafat, A., & Baek, J. (2021). Design of External Rotor Ferrite-Assisted Synchronous Reluctance Motor for High Power Density. Applied Sciences, 11(7), 3102. https://doi.org/10.3390/app11073102