
Reduction of Pesticide Use in Fresh-Cut Salad Production through Artificial Intelligence

 , ,
, , 

 ,
,  , and
, and 
Abstract
1. Introduction
1.1. Pesticide Use in Europe
1.2. Pesticide Use in Italy
1.3. Fresh-Cut Products
1.4. Fresh-Cut Salad Sector in Italy
2. Materials and Methods
2.1. Main Subsystems of the Machine
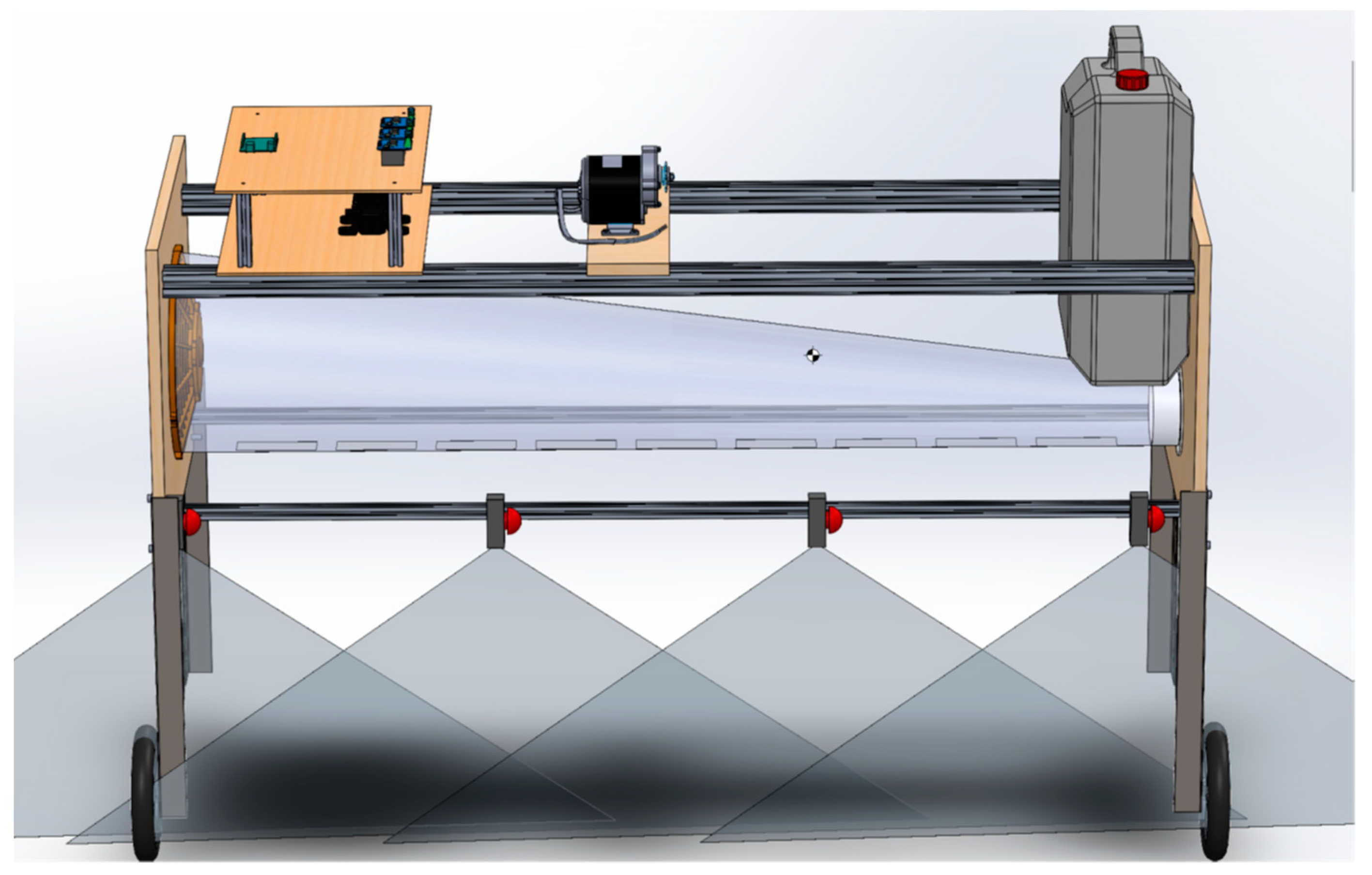
2.2. Prototype
- A simplified structure made with wooden panels, while the actuation of the boom was eliminated, and the “legs” of the prototype were used to manually change the height between tests.
- A small tank, of 20 L capacity, however sufficient for carrying out several test sets.
- No flow sensors: new nozzles are used, the nominal flow rate is therefore known and so no pressure sensor is needed to obtain all the flow parameters.
- No navigation hardware. The testing will be carried out in a straight line.
- Laptops instead of a dedicated embedded PC.
- A main power supply instead of a battery. Moreover, due to the reduced power, the main circuit voltage was reduced from 48 V to 12 V.
- A geared motor instead of the in-hub motors. The gear was used to drive a chain with one extremity fixed to the wall and so regulate the test bench speed.
- Two cheap pumps have been used instead of a professional model. The quality of the pump is not relevant to the test results since the flow conditions are directly imposed.
2.3. Field Tests
- the nozzles’ typology: the nozzle type affects the drops’ dimension;
- nozzle distance: the distance affects the area covered by the drops, and in particular the spraying overlap between the adjacent nozzles, in order to obtain the maximum distribution uniformity;
- nozzle height: the height of the nozzles from the top of the crop affects the size of the drop-covered area;
- rover speed: the speed affects the amount of mixture distributed on a given surface;
- pressure: the variation of the spraying pressure changes the drop size, affecting the coverage of the crop, but also the possible drift of the mixture.
2.3.1. Real-Time Measurement of the Plants’ Features
- decimation filter: the resolution of the depth scene is reduced to reduce the necessary computation power;
- spatial filter: an edge-preserving filter with a performance that can be used in real-time;
- temporal filter: a filter that uses the information of the previous frames to adjust the current frame. This is a useful function, above all in static conditions.
(trays_height = 0.06 m).
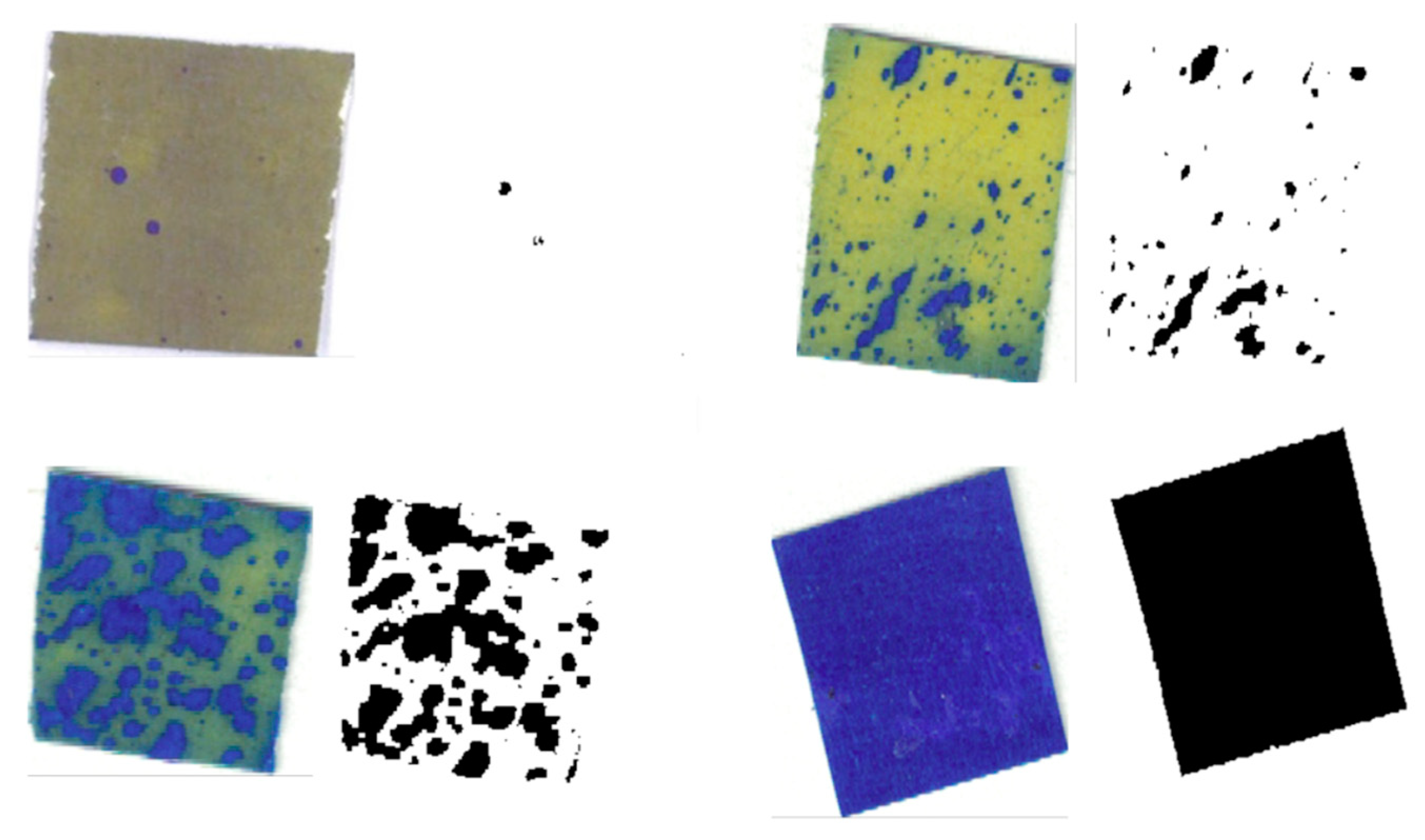
2.3.2. Evaluation of the Spraying Quality and the Amount of Spray Liquid (Water) Used
- is the number of nonwhite pixels, i.e., the number of pixels in a 2D image representing the water-sensitive paper.
- is the number of blue pixels, i.e., those pixels in the 2D image of the water-sensitive paper that represent parts of the paper covered by water.
- is the x coordinate of the geometric center of all nonwhite pixels in the 2D image.
- is the y coordinate of the geometric center of all nonwhite pixels in the 2D image.
- is the x coordinate of the geometric center of all blue pixels in the 2D image.
- is the y coordinate of the geometric center of all blue pixels in the 2D image.
- is the coverage, can be expressed in percentage as indicates what percentage of the area of the water-sensitive paper is covered by water or, in more practical terms, sprayed well.
- d = is the distance (offset) between the two geometric centers defined above; the lower the value, the more centered spraying is performed.
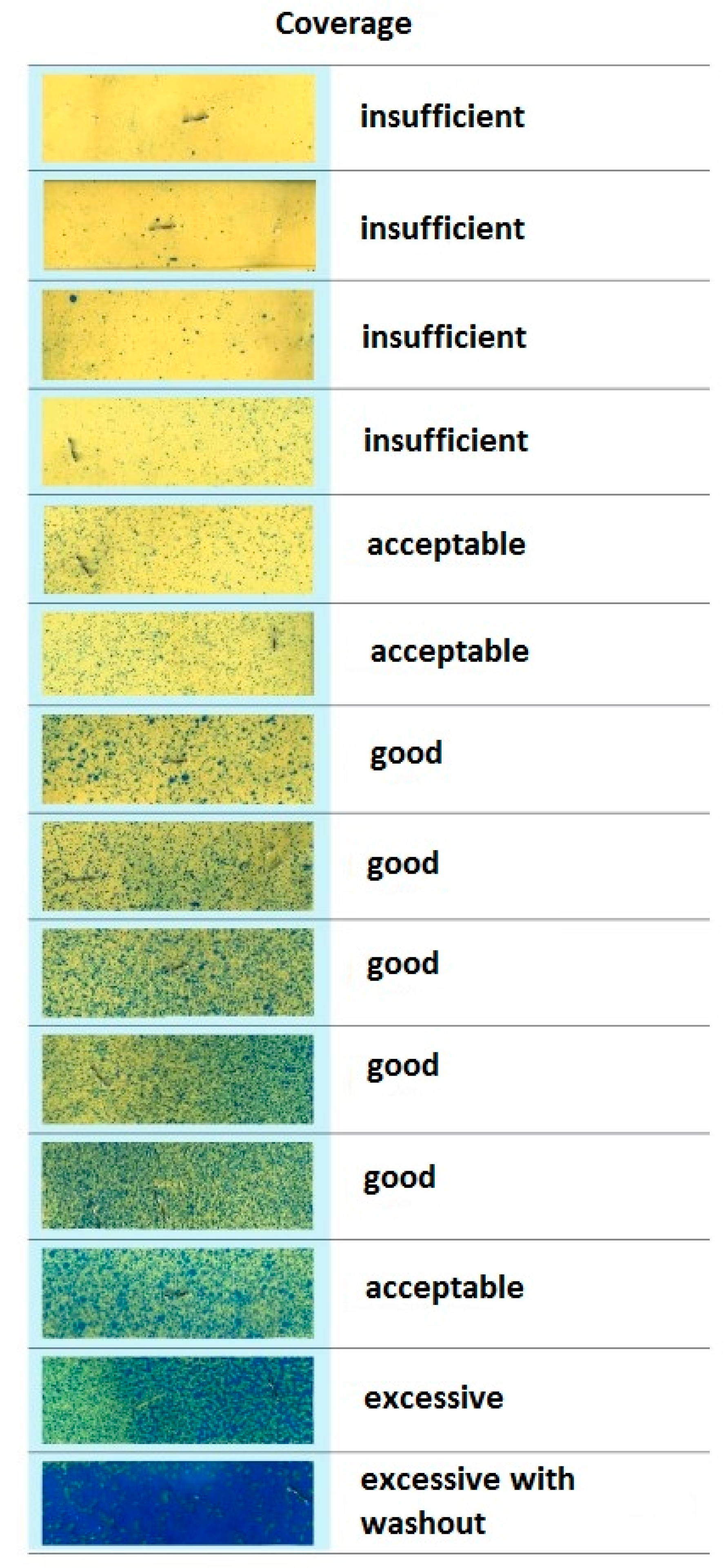
- is the number of insufficiently sprayed samples, i.e., those papers for which the coverage is below the adopted threshold . The threshold value was adopted experimentally, after running the program for different values and comparing with the exemplary papers from reference [19].
- is the number of all other samples from the same test and region; in total is the number of papers in a single test, from a single specific region.
- is the average coverage for the single test, defined as , is the coverage of every single water-sensitive paper belonging to this test and region.
- is the standard deviation of coverage for the given test and region.
- is the average distance (offset) for the single test, defined as: , where is the offset for every single water-sensitive sample belonging to the considered test and region.
- is the standard deviation of distance (offset) for the given test and region.
- is the nozzle flow rate
- is the travelling speed of the rover
- is the distance between the nozzles.
- is the differential pressure between the pressure of fluid inside the nozzle and ambient pressure; this differential pressure is directly obtained from the sensor.
- Average coverage should be acceptable (not too low, and with no or very few insufficient papers, Figure 4).
- Coverage in liters per hectare should be as low as possible.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | |||||||
|---|---|---|---|---|---|---|---|
| 1-upper | 25 | 0 | 94.2 | 3.2 | 1.89 | 1.58 | 952.0 |
| 1-lower | 8 | 12 | 31 | 19.9 | 22.62 | 24.80 | 952.0 |
| 1-ground | 24 | 0 | 96.8 | 1.1 | 0.65 | 0.88 | 952.0 |
| 2-upper | 25 | 0 | 85.8 | 12.0 | 4.67 | 4.15 | 426.0 |
| 2-lower | 24 | 1 | 78.5 | 18.3 | 6.68 | 6.20 | 426.0 |
| 2-ground | 24 | 0 | 96.6 | 1.5 | 0.86 | 1.49 | 426.0 |
| 3-upper | 25 | 0 | 77.5 | 18.8 | 9.11 | 6.96 | 662.4 |
| 3-lower | 11 | 13 | 36.3 | 21.0 | 43.09 | 21.63 | 662.4 |
| 3-ground | 25 | 0 | 95.5 | 2.7 | 1.34 | 1.87 | 662.4 |
| 4-upper | 23 | 2 | 38.9 | 17.8 | 12.78 | 9.03 | 435.0 |
| 4-lower | 8 | 15 | 18.7 | 10.0 | 22.44 | 10.65 | 435.0 |
| 4-ground | 25 | 0 | 96.7 | 0.8 | 0.66 | 0.47 | 435.0 |
| 5-upper | 22 | 1 | 45.9 | 16.6 | 7.82 | 5.40 | 466.2 |
| 5-lower | 8 | 15 | 35.4 | 23.3 | 13.72 | 9.02 | 466.2 |
| 5-ground | 25 | 0 | 96.6 | 1.0 | 0.68 | 0.65 | 466.2 |
| 6-upper | 25 | 0 | 78.6 | 14.3 | 4.54 | 3.27 | 447.9 |
| 6-lower | 5 | 19 | 20.6 | 9.8 | 11.62 | 9.08 | 447.9 |
| 6-ground | 25 | 0 | 96.6 | 1.4 | 0.87 | 0.99 | 447.9 |
| 7-upper | 22 | 1 | 45.9 | 16.5 | 8.02 | 5.49 | 584.0 |
| 7-lower | 8 | 15 | 35.2 | 23.3 | 13.79 | 9.24 | 584.0 |
| 7-ground | 25 | 0 | 96.6 | 1.0 | 0.68 | 0.65 | 584.0 |
| 8-upper | 25 | 0 | 78.8 | 19.5 | 6.32 | 6.35 | 622.5 |
| 8-lower | 19 | 4 | 62.0 | 26.5 | 14.45 | 11.69 | 622.5 |
| 8-ground | 25 | 0 | 96.7 | 1.5 | 0.67 | 0.69 | 622.5 |
| 9-upper | 25 | 0 | 85.8 | 12.0 | 4.67 | 4.15 | 426.0 |
| 9-lower | 24 | 1 | 78.5 | 18.3 | 6.68 | 6.20 | 426.0 |
| 9-ground | 24 | 0 | 96.6 | 1.5 | 0.86 | 1.49 | 426.0 |
| 10-upper | 25 | 0 | 75.9 | 28.3 | 5.46 | 6.21 | 492.2 |
| 10-lower | 18 | 5 | 55.0 | 27.1 | 13.86 | 11.85 | 492.2 |
| 10-ground | 24 | 0 | 96.9 | 1.0 | 0.47 | 0.47 | 492.2 |
| 11-upper | 22 | 3 | 62.0 | 17.8 | 9.97 | 6.44 | 306.8 |
| 11-lower | 7 | 18 | 17.5 | 14.6 | 31.15 | 25.59 | 306.8 |
| 11-ground | 24 | 0 | 97.3 | 0.6 | 0.37 | 0.24 | 306.8 |
| 12-upper | 24 | 1 | 73.1 | 30.4 | 8.73 | 11.65 | 440.0 |
| 12-lower | 7 | 18 | 53.8 | 25.8 | 15.37 | 11.27 | 440.0 |
| 12-ground | 21 | 0 | 97.1 | 0.6 | 0.48 | 0.33 | 440.0 |
| 13-upper | 24 | 0 | 84.0 | 22.7 | 6.15 | 11.55 | 438.0 |
| 13-lower | 21 | 3 | 81.6 | 15.0 | 6.25 | 5.04 | 438.0 |
| 13-ground | 23 | 0 | 95.4 | 4.7 | 1.73 | 4.23 | 438.0 |
| 14-upper | 23 | 0 | 95.2 | 4.4 | 1.39 | 1.82 | 469.6 |
| 14-lower | 21 | 1 | 84.1 | 15.7 | 6.73 | 10.54 | 469.6 |
| 14-ground | 21 | 0 | 97.0 | 0.5 | 0.42 | 0.27 | 469.6 |
| 15-upper | 21 | 1 | 57.8 | 30.8 | 13.39 | 13.67 | 438.0 |
| 15-lower | 18 | 5 | 75.4 | 24.6 | 8.47 | 12.24 | 438.0 |
| 15-ground | 25 | 0 | 91.6 | 16.8 | 4.17 | 14.36 | 438.0 |
| 16-upper | 14 | 10 | 34.9 | 18.5 | 14.71 | 10.79 | 354.8 |
| 16-lower | 7 | 12 | 21.6 | 12.2 | 29.80 | 17.04 | 354.8 |
| 16-ground | 24 | 0 | 94.1 | 1.8 | 2.01 | 1.26 | 354.8 |
| 17-upper | 24 | 0 | 75.0 | 27.6 | 9.50 | 13.41 | 441.8 |
| 17-lower | 22 | 1 | 81.5 | 26.4 | 7.00 | 14.33 | 441.8 |
| 17-ground | 25 | 0 | 95.1 | 0.8 | 1.14 | 0.62 | 441.8 |
| 18-upper | 20 | 4 | 49.2 | 25.0 | 13.64 | 10.01 | 404.7 |
| 18-lower | 15 | 5 | 36.7 | 23.1 | 24.63 | 18.50 | 404.7 |
| 18-ground | 25 | 0 | 94.9 | 1.1 | 1.34 | 1.04 | 404.7 |
| 19-upper | 18 | 6 | 49.9 | 31.7 | 13.50 | 13.98 | 432.5 |
| 19-lower | 15 | 5 | 34.9 | 28.2 | 19.18 | 16.62 | 432.5 |
| 19-ground | 25 | 0 | 94.2 | 1.9 | 1.70 | 1.53 | 432.5 |
| 20-upper | 16 | 8 | 47.8 | 34.2 | 7.68 | 5.25 | 358.8 |
| 20-lower | 10 | 15 | 28.5 | 26.8 | 24.38 | 17.02 | 358.8 |
| 20-ground | 24 | 0 | 94.1 | 2.2 | 2.02 | 1.56 | 358.8 |
| 21-upper | 24 | 0 | 67.1 | 28.3 | 11.41 | 9.55 | 435.3 |
| 21-lower | 21 | 4 | 68.1 | 29.5 | 13.31 | 14.26 | 435.3 |
| 21-ground | 24 | 0 | 94.1 | 2.9 | 1.94 | 2.32 | 435.3 |
| 22-upper | 16 | 4 | 54.9 | 32.0 | 15.36 | 16.23 | 422.4 |
| 22-lower | 20 | 3 | 56.8 | 33.2 | 13.84 | 14.64 | 422.4 |
| 22-ground | 25 | 0 | 92.6 | 2.8 | 2.22 | 1.49 | 422.4 |
| 23-upper | 23 | 0 | 94.0 | 4.3 | 2.03 | 2.37 | 379.8 |
| 23-lower | 23 | 0 | 94.4 | 4.8 | 3.16 | 3.37 | 379.8 |
| 23-ground | 25 | 0 | 93.1 | 4.6 | 3.68 | 3.77 | 379.8 |
| 24-upper | 25 | 0 | 95.7 | 2.2 | 1.47 | 1.70 | 456.7 |
| 24-lower | 21 | 0 | 95.8 | 2.8 | 1.52 | 1.59 | 456.7 |
| 24-ground | 24 | 0 | 96.4 | 1.0 | 1.35 | 0.89 | 456.7 |
| 25-upper | 23 | 0 | 93.3 | 13.6 | 2.06 | 4.21 | 347.1 |
| 25-lower | 23 | 0 | 92.0 | 15.2 | 2.92 | 4.72 | 347.1 |
| 25-ground | 23 | 0 | 96.0 | 1.4 | 1.65 | 1.13 | 347.1 |
| 26-upper | 16 | 9 | 38.9 | 28.8 | 22.23 | 18.47 | 247.9 |
| 26-lower | 19 | 5 | 42.2 | 30.3 | 21.65 | 13.09 | 247.9 |
| 26-ground | 22 | 0 | 94.3 | 4.9 | 2.24 | 3.50 | 247.9 |
| 27-upper | 22 | 2 | 62.4 | 32.7 | 16.94 | 17.40 | 265.5 |
| 27-lower | 22 | 2 | 77.8 | 29.1 | 8.90 | 14.47 | 265.5 |
| 27-ground | 20 | 0 | 94.7 | 4.4 | 2.61 | 3.22 | 265.5 |
| 28-upper | 23 | 2 | 72.1 | 30.4 | 9.67 | 14.47 | 380.5 |
| 28-lower | 17 | 5 | 53.8 | 34.8 | 20.35 | 21.11 | 380.5 |
| 28-ground | 20 | 0 | 96.6 | 0.5 | 0.80 | 0.38 | 380.5 |
| 29-upper | 16 | 6 | 72.5 | 20.8 | 13.23 | 12.99 | 344.2 |
| 29-lower | 22 | 2 | 82.0 | 23.4 | 8.69 | 14.13 | 344.2 |
| 29-ground | 25 | 0 | 96.6 | 0.8 | 0.94 | 0.53 | 344.2 |
| 30-upper | 25 | 0 | 83.3 | 22.0 | 5.44 | 8.62 | 957.6 |
| 30-lower | 21 | 2 | 86.2 | 20.5 | 4.68 | 7.34 | 957.6 |
| 30-ground | 25 | 0 | 96.9 | 0.7 | 0.55 | 0.33 | 957.6 |
| 31-upper | 19 | 4 | 70.2 | 21.8 | 7.83 | 6.74 | 650.4 |
| 31-lower | 15 | 9 | 46.0 | 28.4 | 19.45 | 17.35 | 650.4 |
| 31-ground | 24 | 0 | 94.7 | 7.2 | 1.60 | 3.08 | 650.4 |
| 32-upper | 22 | 3 | 79.6 | 26.6 | 8.01 | 13.98 | 697.3 |
| 32-lower | 16 | 9 | 71.8 | 32.2 | 14.23 | 22.95 | 697.3 |
| 32-ground | 22 | 0 | 94.2 | 5.3 | 1.22 | 0.78 | 697.3 |
| 33-upper | 22 | 3 | 53.8 | 25.1 | 9.52 | 10.19 | 440.5 |
| 33-lower | 14 | 10 | 42.4 | 29.5 | 10.24 | 9.05 | 440.5 |
| 33-ground | 22 | 0 | 96.1 | 1.5 | 0.87 | 1.07 | 440.5 |
| 34-upper | 22 | 1 | 76.7 | 28.7 | 5.78 | 6.94 | 284.3 |
| 34-lower | 21 | 2 | 79.7 | 26.9 | 7.37 | 12.09 | 284.3 |
| 34-ground | 24 | 0 | 96.7 | 0.6 | 0.68 | 0.27 | 284.3 |
| 35-upper | 22 | 2 | 60.8 | 34.5 | 8.82 | 11.26 | 372.8 |
| 35-lower | 14 | 11 | 48.2 | 30.9 | 23.40 | 16.06 | 372.8 |
| 35-ground | 24 | 0 | 97.0 | 0.4 | 0.60 | 0.26 | 372.8 |
| 36-upper | 21 | 3 | 54.4 | 28.3 | 9.08 | 13.00 | 192.0 |
| 36-lower | 12 | 8 | 51.7 | 37.7 | 18.05 | 23.76 | 192.0 |
| 36-ground | 24 | 0 | 95.6 | 4.8 | 1.48 | 3.86 | 192.0 |
| 37-upper | 18 | 6 | 60.8 | 24.2 | 13.68 | 13.62 | 330.9 |
| 37-lower | 13 | 10 | 61.3 | 30.7 | 12.27 | 12.38 | 330.9 |
| 37-ground | 21 | 0 | 96.1 | 1.0 | 1.00 | 0.55 | 330.9 |
| Test Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Height (cm) | 65 | 65 | 65 | 65 | 65 | 53 | 53 | 53 |
| Nozzle distance (cm) | 50 | 50 | 50 | 50 | 50 | 40 | 40 | 40 |
| Number of nozzles | 2 | 2 | 2 | 2 | 2 | 3 | 3 | 3 |
| Nozzle type (l/min) at 300 kPa | 2.4 | 1.6 | 1.6 | 1 | 0.8 | 0.8 | 0.8 | 0.8 |
| Nozzle inclination (°) | 2 | 2 | −22 | −22 | −22 | −22 | −22 | −22 |
| Air inclination (°) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Speed (km/h) | 2.45 | 2.45 | 2.50 | 2.51 | 2.35 | 2.45 | 2.45 | 2.00 |
| Pressure (kPa) | 197.5 | 216.7 | 223.2 | 248.7 | 390.0 | 251.8 | 428.1 | 322.9 |
| Flow (l/min) | 1.95 | 1.36 | 1.38 | 0.91 | 0.91 | 0.73 | 0.96 | 0.83 |
| Average plant height (cm) | 7 | 7 | 7 | 7 | 7 | 7 | 7 | 7 |
| PWM1motor (%) | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 80 |
| PWM1pump (%) | 77 | 60 | 60 | 45 | 52 | 52 | 77 | 62 |
| Test Number | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| Height (cm) | 53 | 53 | 53 | 27 | 27 | 27 | 27 | 37 |
| Nozzle distance (cm) | 40 | 50 | 50 | 50 | 25 | 25 | 25 | 25 |
| Number of nozzles | 3 | 3 | 2 | 2 | 3 | 3 | 3 | 3 |
| Nozzle type (l/min) at 300 kPa | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 |
| Nozzle inclination (°) | 0 | 0 | 0 | 0 | 20 | −20 | −20 | −20 |
| Air inclination (°) | 30 | 30 | 30 | 30 | 30 | 30 | 30 | 30 |
| Speed (km/h) | 2.25 | 2.25 | 3.60 | 4.15 | 4.15 | 3.86 | 3.91 | 3.86 |
| Pressure (kPa) | 191.4 | 399.3 | 397.0 | 271.8 | 269.4 | 267.0 | 239.0 | 152.4 |
| Flow (l/min) | 0.64 | 0.92 | 0.92 | 0.76 | 0.76 | 0.75 | 0.71 | 0.57 |
| Average plant height (cm) | 7 | 7 | 7 | 7 | 7 | 7 | 14 | 14 |
| PWM1motor (%) | 100 | 100 | 73 | 100 | 100 | 100 | 100 | 100 |
| PWM1pump (%) | 77 | 84 | 84 | 55 | 55 | 55 | 55 | 55 |
| Test Number | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| Height (cm) | 37 | 37 | 37 | 49 | 49 | 49 | 49 | 49 |
| Nozzle distance (cm) | 25 | 25 | 25 | 50 | 40 | 50 | 50 | 50 |
| Number of nozzles | 3 | 3 | 3 | 2 | 3 | 2 | 2 | 2 |
| Nozzle type (l/min) at 300 kPa | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | 1.0 | 1.2 | 0.8 |
| Nozzle inclination (°) | 0 | 45, −45 | 45, −45 | −20 | −20 | −20 | −20 | 0 |
| Air inclination (°) | 30 | 30 | 30 | 0 | 0 | 0 | 0 | 24 |
| Speed (km/h) | 4.32 | 3.86 | 3.62 | 2.51 | 2.51 | 2.70 | 3.97 | 3.12 |
| Pressure (kPa) | 296.4 | 198.3 | 199.9 | 264.3 | 249.0 | 271.0 | 329.0 | 661.4 |
| Flow (l/min) | 0.80 | 0.65 | 0.65 | 0.75 | 0.73 | 0.95 | 1.26 | 1.19 |
| Average plant height (cm) | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 |
| PWM1motor (%) | 100 | 100 | 100 | 68 | 68 | 68 | 100 | 80 |
| PWM1pump (%) | 60 | 45 | 45 | 39 | 52 | 47 | 60 | 84 |
| Test Number | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 |
| Height (cm) | 49 | 49 | 49 | 49 | 65 | 65 | 65 | 65 |
| Nozzle distance (cm) | 50 | 50 | 50 | 25 | 50 | 50 | 50 | 50 |
| Number of nozzles | 2 | 2 | 2 | 3 | 2 | 2 | 2 | 2 |
| Nozzle type (l/min) at 300 kPa | 0.8 | 0.6 | 0.6 | 0.6 | 0.6 | 2.4 | 1.6 | 1.6 |
| Nozzle inclination (°) | 0 | 0 | 0 | 45, −45 | 20 | 0 | 0 | −20 |
| Air inclination (°) | 30 | 30 | 30 | 30 | 30 | 0 | 0 | 0 |
| Speed (km/h) | 3.18 | 3.38 | 3.48 | 4.15 | 3.00 | 2.57 | 2.45 | 2.35 |
| Pressure (kPa) | 395.6 | 405.0 | 495.0 | 361.5 | 617.1 | 219.3 | 207.4 | 218.1 |
| Flow (l/min) | 0.92 | 0.70 | 0.77 | 0.66 | 0.86 | 2.05 | 1.33 | 1.36 |
| Average plant height (cm) | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 |
| PWM1motor (%) | 80 | 90 | 80 | 100 | 100 | 62 | 62 | 62 |
| PWM1pump (%) | 52 | 45 | 52 | 56 | 65 | 75 | 56 | 58 |
| Test Number | 33 | 34 | 35 | 36 | 37 | |||
| Height (cm) | 65 | 65 | 49 | 49 | 49 | |||
| Nozzle distance (cm) | 50 | 50 | 50 | 50 | 50 | |||
| Number of nozzles | 2 | 2 | 2 | 2 | 2 | |||
| Nozzle type (l/min) at 300 kPa | 0.8 | 1.0 | 1.2 | 0.6 | 0.8 | |||
| Nozzle inclination (°) | −20 | −20 | −20 | −20 | 0 | |||
| Air inclination (°) | 0 | 0 | 0 | 30 | 30 | |||
| Speed (km/h) | 2.45 | 4.00 | 4.06 | 3.72 | 3.29 | |||
| Pressure (mbar) | 380.6 | 269.4 | 331.4 | 2959 | 3865 | |||
| Flow (l/min) | 0.90 | 0.95 | 1.26 | 0.60 | 0.91 | |||
| Average plant height (cm) | 14 | 14 | 14 | 14 | 14 | |||
| PWM1motor (%) | 62 | 100 | 100 | 100 | 80 | |||
| PWM1pump (%) | 51 | 46 | 60 | 36 | 52 | |||
References
- How to Feed the World 2050, High-Level Expert Forum FAO. Available online: http://www.fao.org/fileadmin/templates/wsfs/docs/Issues_papers/HLEF2050_Global_Agriculture.pdf (accessed on 11 December 2020).
- The International Code of Conduct on Pesticides Management, FAO and WHO. Available online: http://www.fao.org/3/a-i3604e.pdf (accessed on 11 December 2020).
- Pesticides, European Commission. Available online: https://ec.europa.eu/food/plant/pesticides_en (accessed on 14 December 2020).
- Statistics on Pesticides Use in Agriculture, 1990–2018, FAO Environmental Statistics. Available online: http://www.fao.org/economic/ess/environment/data/pesticides-use/en/ (accessed on 12 December 2020).
- Directive 2009/128/EC of the European Parliament and the Council of 21 October 2009. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX:02009L0128-20091125&from=EN (accessed on 14 December 2020).
- Pesticides Use, FAOSTAT. Available online: http://www.fao.org/faostat/en/#home (accessed on 12 December 2020).
- Agri-Environmental Indicator—Consumption of Pesticides, Eurostat. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Agri-environmental_indicator_-_consumption_of_pesticides#Data_sources (accessed on 12 December 2020).
- Distribuzione per uso Agricolo dei Prodotti Fitosanitari (Erbicidi, Fungicidi, Insetticidi, Acaricidi e Vari), ISTAT. Available online: https://annuario.isprambiente.it/ada/downreport/html/6940 (accessed on 13 December 2020).
- Italian Agriculture in Figures 2017, CREA. Available online: https://www.crea.gov.it/documents/68457/0/Itaconta+2017_+ING_DEF_WEB2.pdf/1218e51d-0bf5-03d0-3089-0a56af2e26d5?t=1559117850834 (accessed on 14 December 2020).
- Gullino, M.L.; Gilardi, G.; Garibaldi, A. Ready-to-eat salad crops: A plant pathogen’s heaven. Plant Dis. 2019, 103, 2153–2170. [Google Scholar] [CrossRef] [PubMed]
- Casati, D.; Baldi, L. L’importanza economica del comparto della IV gamma. In Le Malattie degli Ortaggi di IV Gamma; Sanninoand, L., Espinosa, B., Eds.; Inteli Press: Battipaglia, Italy, 2016; pp. 19–30. [Google Scholar]
- Intel RealSense Depth Camera d435i. Available online: https://www.intelrealsense.com/depth-camera-d435i/ (accessed on 16 September 2020).
- Intel RealSense SDK 2.0 Library. Available online: https://github.com/IntelRealSense/librealsense (accessed on 16 September 2020).
- Intel RealSense SDK 2.0 Library: Post-Processing Filters. Available online: https://github.com/IntelRealSense/librealsense/blob/master/doc/post-processing-filters.md (accessed on 16 September 2020).
- Open-Source Computer Vision Library. Available online: https://github.com/opencv/opencv (accessed on 21 September 2020).
- OpenCV: Color Detection and Segmentation Example. Available online: https://www.learnopencv.com/invisibility-cloak-using-colordetection-and-segmentation-with-opencv/ (accessed on 17 September 2020).
- RGB Color Model. Available online: https://en.wikipedia.org/wiki/RGB_color_model (accessed on 17 September 2020).
- HSV Color Model. Available online: https://en.wikipedia.org/wiki/HSL_and_HSV (accessed on 21 September 2020).
- Quaderno: Agricoltura Responsabile. Syngenta. 2014. Available online: https://www.syngenta.it/file/5031/download?token=NyHxitSm (accessed on 25 August 2020).




| Test | |||||||
|---|---|---|---|---|---|---|---|
| 9-upper | 25 | 0 | 85.8 | 12.0 | 4.67 | 4.15 | 426.0 |
| 9-lower | 24 | 1 | 78.5 | 18.3 | 6.68 | 6.20 | 426.0 |
| 9-ground | 24 | 0 | 96.6 | 1.5 | 0.86 | 1.49 | 426.0 |
| 13-upper | 24 | 0 | 84.0 | 22.7 | 6.15 | 11.55 | 438.0 |
| 13-lower | 21 | 3 | 81.6 | 15.0 | 6.25 | 5.04 | 438.0 |
| 13-ground | 23 | 0 | 95.4 | 4.7 | 1.73 | 4.23 | 438.0 |
| 14-upper | 23 | 0 | 95.2 | 4.4 | 1.39 | 1.82 | 469.6 |
| 14-lower | 21 | 1 | 84.1 | 15.7 | 6.73 | 10.54 | 469.6 |
| 14-ground | 21 | 0 | 97.0 | 0.5 | 0.42 | 0.27 | 469.6 |
| 17-upper | 24 | 0 | 75.0 | 27.6 | 9.50 | 13.41 | 441.8 |
| 17-lower | 22 | 1 | 81.5 | 26.4 | 7.00 | 14.33 | 441.8 |
| 17-ground | 25 | 0 | 95.1 | 0.8 | 1.14 | 0.62 | 441.8 |
| 21-upper | 24 | 0 | 67.1 | 28.3 | 11.41 | 9.55 | 435.3 |
| 21-lower | 21 | 4 | 68.1 | 29.5 | 13.31 | 14.26 | 435.3 |
| 21-ground | 24 | 0 | 94.1 | 2.9 | 1.94 | 2.32 | 435.3 |
| 24-upper | 25 | 0 | 95.7 | 2.2 | 1.47 | 1.70 | 456.7 |
| 24-lower | 21 | 0 | 95.8 | 2.8 | 1.52 | 1.59 | 456.7 |
| 24-ground | 24 | 0 | 96.4 | 1.0 | 1.35 | 0.89 | 456.7 |
| 27-upper | 22 | 2 | 62.4 | 32.7 | 16.94 | 17.40 | 265.5 |
| 27-lower | 22 | 2 | 77.8 | 29.1 | 8.90 | 14.47 | 265.5 |
| 27-ground | 20 | 0 | 94.7 | 4.4 | 2.61 | 3.22 | 265.5 |
| 34-upper | 22 | 1 | 76.7 | 28.7 | 5.78 | 6.94 | 284.3 |
| 34-lower | 21 | 2 | 79.7 | 26.9 | 7.37 | 12.09 | 284.3 |
| 34-ground | 24 | 0 | 96.7 | 0.6 | 0.68 | 0.27 | 284.3 |
| Test Number | 9 | 13 | 14 | 17 | 21 | 24 | 27 | 34 |
|---|---|---|---|---|---|---|---|---|
| Height (cm) | 53 | 27 | 27 | 37 | 49 | 49 | 49 | 65 |
| Nozzle distance (cm) | 40 | 25 | 25 | 25 | 40 | 50 | 50 | 50 |
| Number of nozzles | 3 | 3 | 3 | 3 | 3 | 2 | 2 | 2 |
| Nozzle type (l/min) at 300 kPa | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | 0.8 | 0.6 | 1 |
| Nozzle inclination (°) | 0 | 20 | −20 | 0 | −20 | 0 | 0 | −20 |
| Air inclination (°) | 30 | 30 | 30 | 30 | 0 | 30 | 30 | 0 |
| Speed (km/h) | 2.25 | 4.15 | 3.86 | 4.32 | 2.51 | 3.12 | 3.48 | 4.00 |
| Pressure (mbar) | 1914 | 2694 | 2670 | 2964 | 2490 | 6614 | 4950 | 2694 |
| Flow (l/min) | 0.64 | 0.76 | 0.75 | 0.80 | 0.73 | 1.19 | 0.77 | 0.95 |
| Average plant height (cm) | 7 | 7 | 7 | 14 | 14 | 14 | 14 | 14 |
| PWM1motor (%) | 100 | 100 | 100 | 100 | 68 | 80 | 80 | 100 |
| PWM1pump (%) | 77 | 55 | 55 | 60 | 52 | 84 | 52 | 46 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Facchinetti, D.; Santoro, S.; Galli, L.E.; Fontana, G.; Fedeli, L.; Parisi, S.; Bonacchi, L.B.; Šušnjar, S.; Salvai, F.; Coppola, G.; et al. Reduction of Pesticide Use in Fresh-Cut Salad Production through Artificial Intelligence. Appl. Sci. 2021, 11, 1992. https://doi.org/10.3390/app11051992
Facchinetti D, Santoro S, Galli LE, Fontana G, Fedeli L, Parisi S, Bonacchi LB, Šušnjar S, Salvai F, Coppola G, et al. Reduction of Pesticide Use in Fresh-Cut Salad Production through Artificial Intelligence. Applied Sciences. 2021; 11(5):1992. https://doi.org/10.3390/app11051992
Chicago/Turabian StyleFacchinetti, Davide, Stefano Santoro, Lavinia Eleonora Galli, Giulio Fontana, Lorenzo Fedeli, Simone Parisi, Luigi Bono Bonacchi, Stefan Šušnjar, Fabio Salvai, Gabriele Coppola, and et al. 2021. "Reduction of Pesticide Use in Fresh-Cut Salad Production through Artificial Intelligence" Applied Sciences 11, no. 5: 1992. https://doi.org/10.3390/app11051992
APA StyleFacchinetti, D., Santoro, S., Galli, L. E., Fontana, G., Fedeli, L., Parisi, S., Bonacchi, L. B., Šušnjar, S., Salvai, F., Coppola, G., Matteucci, M., & Pessina, D. (2021). Reduction of Pesticide Use in Fresh-Cut Salad Production through Artificial Intelligence. Applied Sciences, 11(5), 1992. https://doi.org/10.3390/app11051992