
Robust Optimal Tracking Control of a Full-Bridge DC-AC Converter




Abstract
1. Introduction
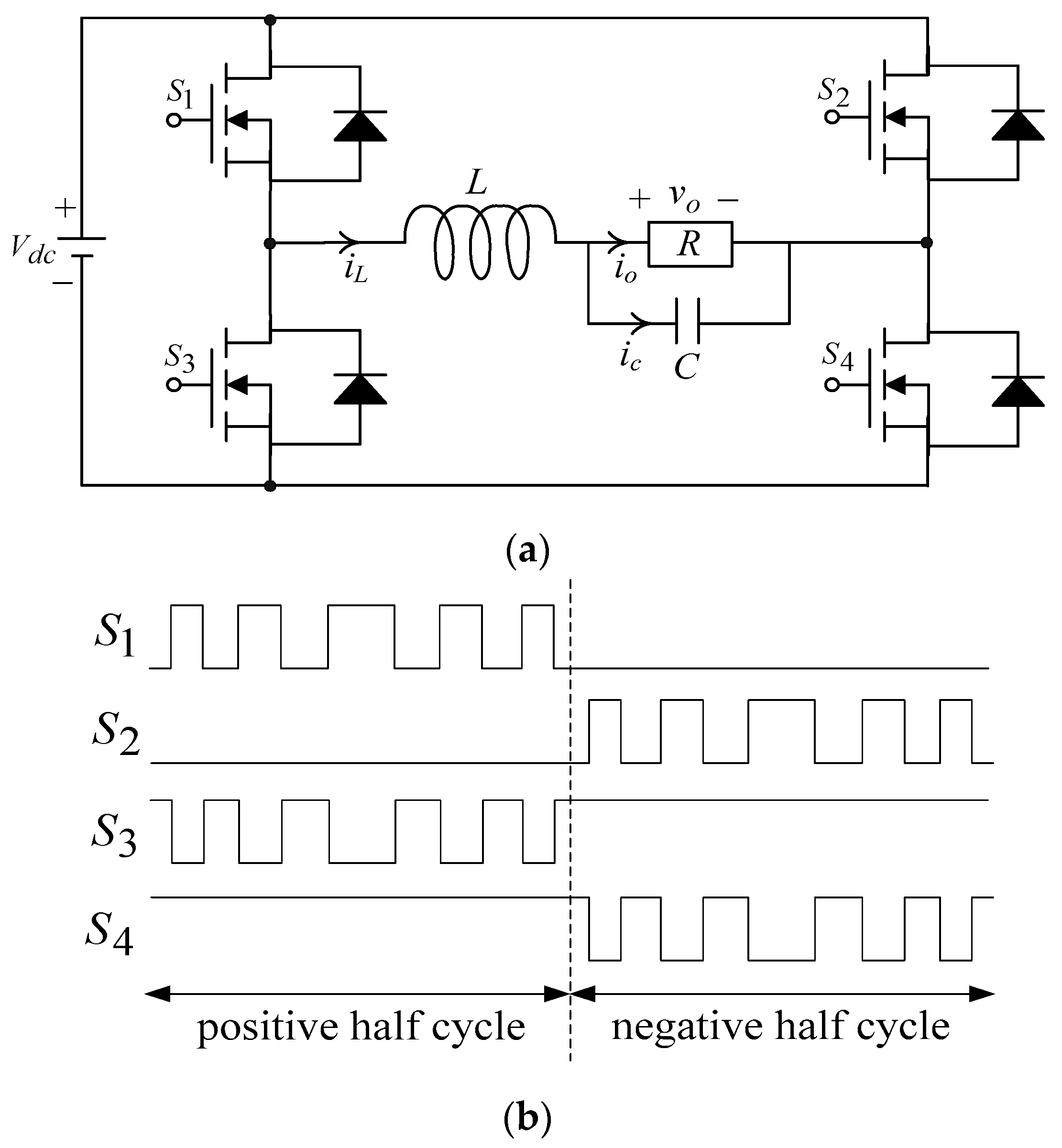
2. Modeling Description of Full-Bridge DC-AC Converter
3. Proposed Control Strategy
4. Simulation and Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Batarseh, I.; Harb, A. Power Electronics: Circuit Analysis and Design; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Sozański, K. Digital Signal Processing in Power Electronics Control Circuits; Springer International Publishing: London, UK, 2017. [Google Scholar]
- Simões, M.G.; Farret, F.A. Modeling Power Electronics and Interfacing Energy Conversion Systems; John Wiley & Sons: Hoboken, NJ, USA; IEEE Press: Piscataway, NJ, USA, 2017. [Google Scholar]
- Abad, G. Power Electronics and Electric Drives for Traction Applications; John Wiley & Sons: Chichester, UK, 2017. [Google Scholar]
- Ramos, G.A.; Ruget, R.I.; Costa-Castelló, R. Robust Repetitive Control of Power Inverters for Standalone Operation in DG Systems. IEEE Trans. Energy Convers. 2020, 35, 237–247. [Google Scholar] [CrossRef]
- Li, J.; Wen, B.Y.; Wang, H.Y. Adaptive Virtual Inertia Control Strategy of VSG for Micro-Grid Based on Improved Bang-Bang Control Strategy. IEEE Access 2019, 7, 39509–39514. [Google Scholar] [CrossRef]
- Singh, S.K.; Choudhuri, S.G. Hybrid iterative learning control strategy for single-phase UPS inverter using inductor current active damping. J. Eng. 2018, 2018, 230–238. [Google Scholar] [CrossRef]
- Hammoudi, M.Y.; Saadi, R.; Cardoso, A.J.M.; Benbouzid, M.E.H.; Sahraoui, M. Practical implementation of H-infinity control for fuel cell-interleaved boost converter. Int. J. Model. Simul. 2018, 1, 44–61. [Google Scholar] [CrossRef]
- Alharbi, B.; Alhomim, M.; McCann, R. Robust Control of DC-DC Boost Converter by using µ-Synthesis Approach. IFAC Pap. 2019, 52, 200–205. [Google Scholar] [CrossRef]
- Orosz, T.; Rassõlkin, A.; Kallaste, A.; Arsénio, P.; Pánek, D.; Kaska, J.; Karban, P. Robust Design Optimization and Emerging Technologies for Electrical Machines: Challenges and Open Problems. Appl. Sci. 2020, 10, 6653. [Google Scholar] [CrossRef]
- Taguchi, G.; Phadke, M.S. Quality engineering through design optimization. In Quality Control, Robust Design, and the Taguchi Method; Springer: Boston, MA, USA, 1989; pp. 77–96. [Google Scholar]
- Souza, G.F.M.; Melo, I.S.; Michalski, M.A.C. Applying Mahalanobis-Taguchi method to detect faults in rotating machinery. In Safety and Reliability–Safe Societies in a Changing World; Taylor & Francis Group: London, UK, 2018; pp. 1115–1123. [Google Scholar]
- Suh, N.P. Axiomatic Design Theory for Systems. Res. Eng. Des. 1998, 10, 189–209. [Google Scholar] [CrossRef]
- Garraoui, R.; Hamed, M.B.; Sbita, L. A robust optimization technique based on first order sliding mode approach for photovoltaic power systems. Int. J. Autom. Comput. 2015, 12, 620–629. [Google Scholar] [CrossRef]
- Lei, G.; Zhu, J.; Guo, Y.; Liu, C.; Ma, B. A Review of Design Optimization Methods for Electrical Machines. Energies 2017, 10, 1962. [Google Scholar] [CrossRef]
- Xiao, S.; Li, Y.L.; Rotaru, M.H.; Sykulski, J.K. Six Sigma Quality Approach to Robust Optimization. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Wang, B.F.; Zhang, X.N.; Manandhar, U.; Gooi, H.B.; Liu, Y.T.; Tan, X.J. Bidirectional Three-Level Cascaded Converter With Deadbeat Control for HESS in Solar-Assisted Electric Vehicles. IEEE Trans. Transp. Electrif. 2019, 5, 1190–1201. [Google Scholar] [CrossRef]
- Lu, N.J.; Hredzak, B. Current Ripple Reduction for Photovoltaic Powered Single-Phase Buck-Boost Differential Inverter under Nonlinear Loads. In Proceedings of the 2018 7th International Conference on Renewable Energy Research and Applications (ICRERA), Paris, France, 14–17 October 2018; pp. 544–548. [Google Scholar]
- Wang, D.N.; Meng, F.W.; Meng, S.G.; Pang, A.P. Design of Stable Controller for Flexible Solar Panel by H∞ Loop-Shaping Method. Complexity 2020, 2020, 1–8. [Google Scholar] [CrossRef]
- Pradhan, S.S.; Pradhan, R.; Subudhi, B. Design and Analysis of an H∞ Controller for a Single Phase Grid Connected Photovoltaic System with Parametric Uncertainties. In Proceedings of the 2019 Second International Conference on Advanced Computational and Communication Paradigms (ICACCP), Gangtok, India, 25–28 February 2019; pp. 1–6. [Google Scholar]
- Derbel, N.; Ghommam, J.; Zhu, Q. Applications of Sliding Mode Control; Springer International Publishing: Singapore, 2017. [Google Scholar]
- Mehta, A.; Naik, B. Sliding Mode Controllers for Power Electronic Converters; Springer International Publishing: Singapore, 2019. [Google Scholar]
- Vardan, M.; Ekaterina, A. Sliding Mode in Intellectual Control and Communication: Emerging Research and Opportunities; IGI Global: Hershey, PA, USA, 2017. [Google Scholar]
- Sira-Ramirez, H. Sliding Regimes in General Non-Linear Systems: A Relative Degree Approach. Int. J. Control 1989, 50, 1487–1506. [Google Scholar] [CrossRef]
- Utkin, V.I. Variable Structure Systems with Sliding Modes. IEEE Trans. Autom. Control 1977, AC-22, 212–222. [Google Scholar] [CrossRef]
- Dekka, G.; Gudey, S.K. Robust Controllers for a Single-Stage Boost DC-AC Inverter. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; pp. 1–6. [Google Scholar]
- Repecho, V.; Biel, D.; Olm, J.M. A simple switching frequency regulated sliding mode controller for a VSI with a full digital implementation. IEEE J. Emerg. Sel. Top. Power Electron. 2020. [CrossRef]
- Wang, Y.; Wai, R.J. Design of Discrete-Time Backstepping Sliding- Mode Control for LCL-Type Grid-Connected Inverter. IEEE Access 2020, 8, 95082–95098. [Google Scholar] [CrossRef]
- Katir, H.; Abouloifa, A.; Noussi, K.; Lachkar, I. Sliding Mode Based Control of Five Cascaded H-Bridge Inverters. In Proceedings of the 2020 International Conference on Electrical and Information Technologies (ICEIT), Rabat, Morocco, 4–7 March 2020; pp. 1–6. [Google Scholar]
- Rafaq, M.S.; Mohammed, S.A.Q.; Choi, H.H.; Jung, J.W. An Improved Sliding Mode Control Technique to Mitigate Mismatched Parameter Uncertainties of Three-Phase Voltage Source Inverters. IEEE Access 2020, 8, 81932–81942. [Google Scholar] [CrossRef]
- Guo, L.P.; Hung, J.Y.; Nelms, R.M. Digital Implementation of Sliding Mode Fuzzy Controllers for Boost Converters. In Proceedings of the Twenty-First Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Dallas, TX, USA, 19–23 March 2006; pp. 1424–1429. [Google Scholar]
- Gomariz, S.; Alarcon, E.; Guinjoan, F.; Vidal-ldiarte, E.; Martinez-Salamero, L. Piecewise PWM-sliding global control of a boost switching regulator by means of first-order Takagi-Sugeno fuzzy control. In Proceedings of the 2001 IEEE International Symposium on Circuits and Systems (ISCAS), Sydney, NSW, Australia, 6–9 May 2001; pp. 715–718. [Google Scholar]
- Medhaffar, H.; Derbel, N. Fuzzy Second-Order Sliding Mode Control Design for a Two-Cell DC-DC Converter. Math. Probl. Eng. 2020, 2020, 1–9. [Google Scholar] [CrossRef]
- Shi, Y.; Sen, P.C. Application of variable structure fuzzy logic controller for DC-DC converters. In Proceedings of the 27th Annual Conference of the IEEE Industrial Electronics Society (IECON), Denver, CO, USA, 29 November–2 December 2001; pp. 2026–2031. [Google Scholar]
- Laraki, M.H.; Brahmi, B.; Chandra, A.; Agbossou, K.; Cardenasgonzalez, A. A Novel Adaptive Control of Three-Phase Inverter for Standalone Distributed Generation System Using Modified Super-Twisting Algorithm with Time Delay Estimation. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 740–745. [Google Scholar]
- Zhao, Z.H.; Yang, J.; Li, S.H.; Yu, X.H.; Wang, Z. Continuous Output Feedback TSM Control for Uncertain Systems With a DC–AC Inverter Example. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 71–75. [Google Scholar] [CrossRef]
- Habib, H.U.R.; Wang, S.R.; Elmorshedy, M.F.; Waqar, A. Performance Analysis of Combined Model-Predictive and Slide-Mode Control for Power Converters in Renewable Energy Systems. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Wen, J.; Nie, Q.B.; Wang, Y.M.; Xu, Q.Y.; Feng, Y. Non-Singular Terminal Sliding Mode Control of Inverter-Fed PMSM System with Chattering Elimination. In Proceedings of the 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Tianjin, China, 19–23 July 2018; pp. 1370–1375. [Google Scholar]
- Levaggi, L. High-gain feedback and sliding modes in infinite dimensional systems. Control Cybern. 2004, 33, 33–50. [Google Scholar]
- Marino, R. High-gain feedback in non-linear control systems. Int. J. Control 2007, 42, 1369–1385. [Google Scholar] [CrossRef]
- Yang, H.T.; Zhang, Y.C.; Huang, P. Improved Predictive Current Control of IM Drives Based on a Sliding Mode Observer. In Proceedings of the 2019 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Quanzhou, China, 31 May–2 June 2019; pp. 1–6. [Google Scholar]
- Yang, B.; Yu, T.; Shu, H.C.; Yao, W.; Jiang, L. Sliding-mode perturbation observer-based sliding-mode control design for stability enhancement of multi-machine power systems. Trans. Inst. Meas. Control 2018, 41, 1418–1434. [Google Scholar] [CrossRef]
- Chaturvedi, S.; Fulwani, D.; Guerrero, J.M. Adaptive-Sliding-Mode-Control based Output Impedance Shaping for Ripple Management in DC Microgrids Affected by Inverter Loads. IEEE Trans. Sustain. Energy 2020. [CrossRef]
- Esmaeili, H.; Asadi, M. A Sliding Mode Controller Based on Robust Model Reference Adaptive Proportional-Integral Control for Stand-Alone Three-Phase Inverter. J. Mod. Power Syst. Clean Energy 2020, 65, 1–11. [Google Scholar]
- Roy, T.K.; Mahmud, M.A.; Islam, S.N.; Rajasekar, N.; Muttaqi, K.M.; Oo, A.M.T. Robust Adaptive Direct Power Control of Grid-Connected Photovoltaic Systems. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Davari, M.; Aghababa, M.P.; Blaabjerg, F.; Saif, M. A Modular Adaptive Robust Nonlinear Control for Resilient Integration of VSIs into Emerging Modernized Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2020. [CrossRef]
- Bag, A.; Subudhi, B.; Ray, P.K. An Adaptive Variable Leaky Least Mean Square Control Scheme for Grid Integration of a PV System. IEEE Trans. Sustain. Energy 2020, 11, 1508–1515. [Google Scholar] [CrossRef]
- Kumar, N.; Saha, T.K.; Dey, J. Control of Dual Inverter Based PV System through Double-Band Adaptive SMC. In Proceedings of the 2019 IEEE International Conference on Sustainable Energy Technologies and Systems (ICSETS), Bhubaneswar, India, 26 February–1 March 2019; pp. 156–160. [Google Scholar]
- Gautam, A.R.; Fulwani, D. Adaptive SMC for the Second-Order Harmonic Ripple Mitigation: A Solution for the Micro-Inverter Applications. IEEE Trans. Power Electron 2019, 34, 8254–8264. [Google Scholar] [CrossRef]
- Bag, A.; Subudhi, B.; Ray, P.K. An adaptive sliding mode control scheme for grid integration of a PV system. CPSS Trans. Power Electron. Appl. 2018, 3, 362–371. [Google Scholar] [CrossRef]
- Wang, N.; Yu, H.S.; Liu, X.D. DTC of induction motor based on adaptive sliding mode control. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 4030–4034. [Google Scholar]
- Kermadi, M.; Salam, Z.; Berkouk, E.M. An adaptive sliding mode control technique applied in grid-connected PV system with reduced chattering effect. In Proceedings of the 2017 IEEE Conference on Energy Conversion (CENCON), Kuala Lumpur, Malaysia, 30–31 October 2017; pp. 180–185. [Google Scholar]
- Deng, L.H.; Fei, J.T.; Cai, C.C. The photovoltaic systems based on a sliding mode and adaptive controller. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 8777–8782. [Google Scholar]
- Ishaque, K.; Salam, Z. A Deterministic Particle Swarm Optimization Maximum Power Point Tracker for Photovoltaic System under Partial Shading Condition. IEEE Trans. Ind. Electron. 2013, 60, 3195–3206. [Google Scholar] [CrossRef]
- Parsopoulos, K.E.; Vrahatis, M.N. Particle Swarm Optimization and Intelligence: Advances and Applications; Information Science Reference: Hershey, PA, USA, 2010. [Google Scholar]
- Ruiz-Cruz, R.; Sanchez, E.N.; Ornelas-Tellez, F.; Loukianov, A.G.; Harley, R.G. Particle Swarm Optimization for Discrete-Time Inverse Optimal Control of a Doubly Fed Induction Generator. IEEE Trans. Cybern. 2013, 43, 1698–1709. [Google Scholar] [CrossRef]
- Zhao, J.H.; Wen, F.S.; Dong, Z.Y.; Xue, Y.S.; Wong, K.P. Optimal Dispatch of Electric Vehicles and Wind Power Using Enhanced Particle Swarm Optimization. IEEE Trans. Ind. Inform. 2012, 8, 889–899. [Google Scholar] [CrossRef]
- Tang, Y.F.; Ju, P.; He, H.B.; Qin, C.; Wu, F. Optimized Control of DFIG-Based Wind Generation Using Sensitivity Analysis and Particle Swarm Optimization. IEEE Trans. Smart Grid 2013, 4, 509–520. [Google Scholar] [CrossRef]
- Wang, J.D.; Yang, F. Optimal capacity allocation of standalone wind/solar/battery hybrid power system based on improved particle swarm optimisation algorithm. IET Proc. Renew. Power Gener. 2013, 7, 443–448. [Google Scholar] [CrossRef]
- Ali, M.; Iqbal, A.; Anees, M.A.; Khan, M.R.; Rahman, K.; Ayyub, M. Differential evolution-based pulse-width modulation technique for multiphase MC. IET Power Electron. 2019, 12, 2224–2235. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Wu, H.B.; Jin, W.; Xu, B.; Ji, Y.; Wu, M. Two-step method for identifying photovoltaic grid-connected inverter controller parameters based on the adaptive differential evolution algorithm. IET Gener. Transm. Distrib. 2017, 11, 4282–4290. [Google Scholar] [CrossRef]
- Koch, G.G.; Osório, C.R.D.; Pinheiro, H.; Oliveira, R.C.L.F.; Montagner, V.F. Design Procedure Combining Linear Matrix Inequalities and Genetic Algorithm for Robust Control of Grid-Connected Converters. IEEE Trans. Ind. Appl. 2020, 56, 1896–1906. [Google Scholar] [CrossRef]
- Wang, Z.B.; Chinthavali, M.; Campbell, S.L.; Wu, T.; Ozpineci, B. A 50-kW Air-Cooled SiC Inverter With 3-D Printing Enabled Power Module Packaging Structure and Genetic Algorithm Optimized Heatsinks. IEEE Trans. Ind. Appl. 2019, 55, 6256–6265. [Google Scholar] [CrossRef]
- Lin, Z.Z.; Wang, J.H.; Fang, Z.J.; Hu, M.L.; Cai, C.S.; Zhang, J.K. Accurate Maximum Power Tracking of Wireless Power Transfer System Based on Simulated Annealing Algorithm. IEEE Access 2018, 6, 60881–60890. [Google Scholar] [CrossRef]
- Trovão, J.P.F.; Santos, V.D.N.; Pereirinha, P.G.; Jorge, H.M.; Antunes, C.H. A Simulated Annealing Approach for Optimal Power Source Management in a Small EV. IEEE Trans. Sustain. Energy 2013, 4, 867–876. [Google Scholar] [CrossRef]
- Chu, K.C.; Horng, D.J.; Chang, K.C. Numerical Optimization of the Energy Consumption for Wireless Sensor Networks Based on an Improved Ant Colony Algorithm. IEEE Access 2019, 7, 105562–105571. [Google Scholar] [CrossRef]
- Yang, S.B.; Wu, M.L.; Yao, X.; Jiang, J.C. Load Modeling and Identification Based on Ant Colony Algorithms for EV Charging Stations. IEEE Trans. Power Syst. 2015, 30, 1997–2003. [Google Scholar] [CrossRef]
- Yue, Y.G.; Cao, L.; Hu, J.; Cai, S.T.; Hang, B.; Wu, H. A Novel Hybrid Location Algorithm Based on Chaotic Particle Swarm Optimization for Mobile Position Estimation. IEEE Access 2019, 7, 58541–58552. [Google Scholar] [CrossRef]
- Pluhacek, M.; Senkerik, R.; Viktorin, A.; Kadavy, T.; Zelinka, I. Chaos Driven PSO with Attractive Search Space Border Points. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–6. [Google Scholar]
- Cao, B.; Bo, M.M.; Pan, J.B.; Liu, Y. Static Voltage Stability Analysis Based on the Combination of Dynamic Continuous Power Flow and Adaptive Chaotic Particle Swarm Optimization. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 2217–2221. [Google Scholar]
- Hu, Q.Q.; Liu, H.Z.; Niu, C.S.; Du, M.Y.; Zhang, Y.A.; Ge, Y. The research and application of chaotic particle swarm optimization algorithm. In Proceedings of the 2017 13th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Guilin, China, 29–31 July 2017; pp. 1058–1062. [Google Scholar]
- Li, N.; Shan, X.W.; Heng, L.; Ren, Y.P.; Pan, H.W.; Ge, L.J. Optimization of Micro-grid Dispatching Based on Adaptive Chaos Particle Swarm Optimization. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies–Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2445–2449. [Google Scholar]
- Vasant, P.M. Handbook of Research on Novel Soft Computing Intelligent Algorithms: Theory and Practical Applications; IGI Global: Hershey, PA, USA, 2013. [Google Scholar]
- Hosseinzadeh, M.; Salmasi, F.R. Power management of an isolated hybrid AC/DC micro-grid with fuzzy control of battery banks. IET Renew. Power Gener. 2015, 9, 484–493. [Google Scholar] [CrossRef]
- Valenciaga, F.; Puleston, P.F.; Battaiotto, P.E. Power control of a photovoltaic array in a hybrid electric generation system using sliding mode techniques. IEEE Proc. Control Theory Appl. 2001, 148, 448–455. [Google Scholar] [CrossRef]
- Gao, W.; Hung, J.C. Variable structure control of nonlinear systems. A new approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar]
- Wang, Z.P.; Mao, Y.S.; Hu, Z.H.; Xie, Y.X. A Sliding Mode Control Design based on the Reaching Law for Matrix Rectifiers. J. Power Electron. 2016, 18, 1122–1130. [Google Scholar] [CrossRef]
- Chen, S.Y.; Liu, W.; Huang, H.X. Nonsingular Fast Terminal Sliding Mode Tracking Control for a Class of Uncertain Nonlinear Systems. J. Control Sci. Eng. 2019, 2019, 1–17. [Google Scholar] [CrossRef]
- Wang, T.H.; Zhao, M.Y.; Li, Y.C.; Liu, K.P. Double-power reaching law sliding mode control for spacecraft decline based on radial basis function networks. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 5396–5401. [Google Scholar]
- Liu, K.; Cao, Y.; Wang, S.; Li, Y. Terminal sliding mode control for landing on asteroids based on double power reaching law. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2444–2449. [Google Scholar]
- Wang, H.; Zhao, X.; Tian, Y. Trajectory tracking control of XY table using sliding mode adaptive control based on fast double power reaching law. Asian J. Control 2016, 18, 2263–2271. [Google Scholar] [CrossRef]
- Khare, V.; Nema, S.; Baredar, P. Ocean Energy Modeling and Simulation with Big Data: Computational Intelligence for System Optimization and Grid Integration; Butterworth-Heinemann Elsevier Ltd.: Oxford, UK, 2020; Chapter 8. [Google Scholar]
- Ahmad, A.A.; Abrishamifar, A.; Farzi, M. A New Design Procedure for Output LC Filter of Single Phase Inverters. In Proceedings of the 2010 Power Electronics and Intelligent Transportation System (PEITS), Shenzhen, China, 13–14 November 2010; pp. 86–91. [Google Scholar]
- Dahono, P.A.; Purwadi, A. An LC filter Design Method for Single-Phase PWM Inverters. In Proceedings of the 1995 Power Electronics and Drive Systems, Singapore, 21–24 February 1995; pp. 571–576. [Google Scholar]
- Kim, H.S.; Sul, S.K. A Novel Filter Design for Output LC Filters of PWM Inverters. J. Power Electron. 2011, 11, 74–81. [Google Scholar] [CrossRef]
- Williams, B.W. Power Electronics: Devices, Drivers, Applications, and Passive Components; McGraw-Hill: New York, NY, USA, 1992. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Filter inductor, | 0.1 mH |
| Filter capacitor, | 20 μF |
| Resistive load, | 12 ohm |
| DC-link voltage, | 200 V |
| AC Output voltage, | 110 Vrms |
| AC Output-voltage frequency | 60 Hz |
| Switching frequency | 30 kHz |
| Simulations | Proposed Strategy | |
| TRIAC-controlled load (Voltage dip) | Rectified load (%THD) | |
| 8.36 Vmax | 0.14% | |
| Typical TA | ||
| TRIAC-controlled load (Voltage dip) | Rectified load (%THD) | |
| 41.31 Vmax | 13.57% | |
| Experiments | Proposed Strategy | |
| Step load change (Voltage dip) | LC variation (%THD) | |
| 10.83 Vmax | 0.08% | |
| Typical TA | ||
| Step load change (Voltage dip) | LC variation (%THD) | |
| 45.56 Vmax | 12.91% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, E.-C.; Cheng, C.-A.; Wu, R.-C. Robust Optimal Tracking Control of a Full-Bridge DC-AC Converter. Appl. Sci. 2021, 11, 1211. https://doi.org/10.3390/app11031211
Chang E-C, Cheng C-A, Wu R-C. Robust Optimal Tracking Control of a Full-Bridge DC-AC Converter. Applied Sciences. 2021; 11(3):1211. https://doi.org/10.3390/app11031211
Chicago/Turabian StyleChang, En-Chih, Chun-An Cheng, and Rong-Ching Wu. 2021. "Robust Optimal Tracking Control of a Full-Bridge DC-AC Converter" Applied Sciences 11, no. 3: 1211. https://doi.org/10.3390/app11031211
APA StyleChang, E.-C., Cheng, C.-A., & Wu, R.-C. (2021). Robust Optimal Tracking Control of a Full-Bridge DC-AC Converter. Applied Sciences, 11(3), 1211. https://doi.org/10.3390/app11031211